JP7534860B2 - ビークル構成要素をビークル構造体に対して動かすためのシステム及び方法 - Google Patents
ビークル構成要素をビークル構造体に対して動かすためのシステム及び方法 Download PDFInfo
- Publication number
- JP7534860B2 JP7534860B2 JP2020062104A JP2020062104A JP7534860B2 JP 7534860 B2 JP7534860 B2 JP 7534860B2 JP 2020062104 A JP2020062104 A JP 2020062104A JP 2020062104 A JP2020062104 A JP 2020062104A JP 7534860 B2 JP7534860 B2 JP 7534860B2
- Authority
- JP
- Japan
- Prior art keywords
- cross beam
- support
- support assembly
- relative
- vehicle component
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 99
- 230000007246 mechanism Effects 0.000 claims description 223
- 230000004044 response Effects 0.000 claims description 71
- 230000033001 locomotion Effects 0.000 claims description 49
- 230000000712 assembly Effects 0.000 claims description 44
- 238000000429 assembly Methods 0.000 claims description 44
- 238000009434 installation Methods 0.000 claims description 37
- 230000008859 change Effects 0.000 claims description 7
- 238000012545 processing Methods 0.000 description 39
- 238000003860 storage Methods 0.000 description 38
- 238000010586 diagram Methods 0.000 description 32
- 238000004891 communication Methods 0.000 description 28
- 230000002085 persistent effect Effects 0.000 description 14
- 230000008901 benefit Effects 0.000 description 9
- 230000006870 function Effects 0.000 description 9
- 238000004519 manufacturing process Methods 0.000 description 7
- 238000012546 transfer Methods 0.000 description 7
- 230000003287 optical effect Effects 0.000 description 5
- 230000008569 process Effects 0.000 description 5
- 239000004020 conductor Substances 0.000 description 4
- 238000012423 maintenance Methods 0.000 description 4
- 230000000007 visual effect Effects 0.000 description 4
- 230000006378 damage Effects 0.000 description 3
- 238000004364 calculation method Methods 0.000 description 2
- 238000004590 computer program Methods 0.000 description 2
- 239000000835 fiber Substances 0.000 description 2
- 238000011900 installation process Methods 0.000 description 2
- 238000013459 approach Methods 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000001413 cellular effect Effects 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 210000003205 muscle Anatomy 0.000 description 1
- 230000000644 propagated effect Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 210000003813 thumb Anatomy 0.000 description 1
- 238000012549 training Methods 0.000 description 1
- 238000003466 welding Methods 0.000 description 1
Images























Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64F—GROUND OR AIRCRAFT-CARRIER-DECK INSTALLATIONS SPECIALLY ADAPTED FOR USE IN CONNECTION WITH AIRCRAFT; DESIGNING, MANUFACTURING, ASSEMBLING, CLEANING, MAINTAINING OR REPAIRING AIRCRAFT, NOT OTHERWISE PROVIDED FOR; HANDLING, TRANSPORTING, TESTING OR INSPECTING AIRCRAFT COMPONENTS, NOT OTHERWISE PROVIDED FOR
- B64F5/00—Designing, manufacturing, assembling, cleaning, maintaining or repairing aircraft, not otherwise provided for; Handling, transporting, testing or inspecting aircraft components, not otherwise provided for
- B64F5/10—Manufacturing or assembling aircraft, e.g. jigs therefor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64F—GROUND OR AIRCRAFT-CARRIER-DECK INSTALLATIONS SPECIALLY ADAPTED FOR USE IN CONNECTION WITH AIRCRAFT; DESIGNING, MANUFACTURING, ASSEMBLING, CLEANING, MAINTAINING OR REPAIRING AIRCRAFT, NOT OTHERWISE PROVIDED FOR; HANDLING, TRANSPORTING, TESTING OR INSPECTING AIRCRAFT COMPONENTS, NOT OTHERWISE PROVIDED FOR
- B64F5/00—Designing, manufacturing, assembling, cleaning, maintaining or repairing aircraft, not otherwise provided for; Handling, transporting, testing or inspecting aircraft components, not otherwise provided for
- B64F5/40—Maintaining or repairing aircraft
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64F—GROUND OR AIRCRAFT-CARRIER-DECK INSTALLATIONS SPECIALLY ADAPTED FOR USE IN CONNECTION WITH AIRCRAFT; DESIGNING, MANUFACTURING, ASSEMBLING, CLEANING, MAINTAINING OR REPAIRING AIRCRAFT, NOT OTHERWISE PROVIDED FOR; HANDLING, TRANSPORTING, TESTING OR INSPECTING AIRCRAFT COMPONENTS, NOT OTHERWISE PROVIDED FOR
- B64F5/00—Designing, manufacturing, assembling, cleaning, maintaining or repairing aircraft, not otherwise provided for; Handling, transporting, testing or inspecting aircraft components, not otherwise provided for
- B64F5/50—Handling or transporting aircraft components
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F7/00—Lifting frames, e.g. for lifting vehicles; Platform lifts
- B66F7/06—Lifting frames, e.g. for lifting vehicles; Platform lifts with platforms supported by levers for vertical movement
- B66F7/0625—Lifting frames, e.g. for lifting vehicles; Platform lifts with platforms supported by levers for vertical movement with wheels for moving around the floor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/063—Automatically guided
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/0755—Position control; Position detectors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/08—Masts; Guides; Chains
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/12—Platforms; Forks; Other load supporting or gripping members
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/12—Platforms; Forks; Other load supporting or gripping members
- B66F9/16—Platforms; Forks; Other load supporting or gripping members inclinable relative to mast
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/12—Platforms; Forks; Other load supporting or gripping members
- B66F9/18—Load gripping or retaining means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/20—Means for actuating or controlling masts, platforms, or forks
- B66F9/24—Electrical devices or systems
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Structural Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Geology (AREA)
- Mechanical Engineering (AREA)
- Manufacturing & Machinery (AREA)
- Civil Engineering (AREA)
- Aviation & Aerospace Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Automatic Assembly (AREA)
Description
を含む。
ビークル構成要素の移動及び位置付けシステムの様々な実施形態が、以下に記載され、関連図面に例示される。別途特定されていない限り、開示されているシステム及び/又はその様々な構成要素は、本明細書で説明され、例示され、且つ/又は組み込まれた構造、構成要素、機能性、及び/又は変形例のうちの少なくとも1つを含み得るが、それらを含むことが必要なわけではない。さらに、本教示に関連して本明細書に記載され、例示され、且つ/又は組み込まれた構造、構成要素、機能性、及び/又は変形例は、他の移動又は位置付けシステムに含まれ得るが、それらに含まれることが必要なわけではない。様々な実施形態の下記の説明は、本質的に単なる例示であり、決して本開示、その用途、又は使用を限定することを意図するものではない。加えて、諸実施形態によって提供される利点は、後述のように、本質的に例示的であり、すべての実施形態が同じ利点又は同程度の利点を提供するわけではない。
ビークル構成要素を動かすためのシステム40が図4から図9に示されている。システム40は、様々なビークル構成要素のいずれかの移動に有用性を有し得るが、他の構成要素の中でもとりわけ逆推力装置13などの構成要素をビークル6の構造体に対して動かすことに特定の有用性を示すことがあり、構成要素をビークルの構造体に設置することにおいて特に役立ち得る。
本開示の一態様では、ビークル構成要素を動かすためのシステム40は、航空機96のエンジン94への取り付けのためにエンジン構成要素92を位置付ける位置付けシステム90の構成要素として特定の有用性を示し得る。その一例が、図12に示される。
システムコントローラ190は、レーザアセンブリ172の第1のレーザ174及び第2のレーザ176を利用して、エンジン構成要素92上の位置(例えば、第2のヒンジ構成要素32)と航空機96上のターゲット位置182(例えば、第1のヒンジ構成要素30)との間の距離及び方位角を算出する。


本開示のシステム40は、図15のフロー図208に提示されているように、ビークル構成要素をビークルの構造体に設置する間、構成要素を構造体に対して動かす方法を実行するのに特に適切であり得る。当該方法は、リフトフレームをビークル構成要素に取り付けるステップであって、リフトフレームが、クロスビーム、及びクロスビームに取り付けられた一対の離間した上反りのトラスアセンブリを含み、リフトフレームをビークル構成要素に取り付けることが、複数の離間された位置で一対のトラスアセンブリをビークル構成要素に固定することを含む、フロー図208の取り付けるステップ210、第1のクロスビーム支持アセンブリでクロスビームの第1の端部を支持する、フロー図208のステップ212、第1の制御信号に応答して、作業面に支持された基部に取り付けられ、前記基部から上方に延びる第1の支持体に沿って、第1のクロスビーム支持アセンブリを動かすことによって、第1のリフト機構によりビークル構成要素を動かす、フロー図208のステップ214、ビークルに対してビークル構成要素の配向を変更するために、第2の制御信号に応答して、第1のクロスビーム支持アセンブリに対して、リフトフレーム及び取り付けられたビークル構成要素を、ビーム軸の周りで回転駆動機構によって回転させる、ステップ216、並びに電子コントローラによって、第1の支持体に沿って第1のクロスビーム支持アセンブリを動かすように第1のリフト機構の動作を制御する第1の制御信号、及び第1のクロスビーム支持アセンブリに対して、リフトフレーム及び取り付けられたビークル構成要素を回転させるように回転駆動機構の動作を制御するための第2の制御信号を生成することによって、ビークルに対するビークル構成要素の配向を変更する、フロー図208のステップ218を含む。
以下のセクションは、本開示に係る、例示的な移動システム及び位置付けシステムの選択された諸態様、並びに関連する方法を説明する。これらのセクションの実施例は、例示を目的としており、本開示の範囲全体を限定するものと解釈するべきではない。各セクションは、1つ又は複数の個々の発明、並びに/又は、状況から得られる若しくは関連する情報、機能、及び/若しくは構造を含み得る。
図17に示したように、この実施例は、本開示の態様に従ってデータ処理システム240(コンピュータとも称される)について記載している。この実施例では、データ処理システム240は、本開示の移動システム及び位置付けシステムの態様の実施に適切な、例示的なデータ処理システムである。より具体的には、上述のように幾つかの実施例では、移動システム及び位置付けシステムは、1つ又は複数のデータ処理システムであり得る又は1つ又は複数のデータ処理システムを含み得るシステムコントローラ(80、190)を含み得る。上述の機能(ビークル構成要素の運動及び位置付けの制御、並びに/又はターゲットポイントに対するエンジン構成要素の相対的位置付けの計算等)を実行するにあたって、システムコントローラ80、190は、以下で示され且つ説明されるように、データ処理システム240の特性の一部又はすべてを示し得る。
本実施例は、図18に示される一般的なネットワークデータ処理システム270を説明する。ネットワークデータ処理システム270は、ネットワーク、コンピュータネットワーク、ネットワークシステム、分散型データ処理システム、又は分散型ネットワークと交換可能に呼ばれてもよく、これらの態様は、本開示の移動システム及び位置付けシステムの1つ又は複数の例示的な実施形態に含まれ得る。例えば、開示されたシステムのシステムコントローラ80、190は、他の用途の中でもとりわけ、製造施設で使用される他の設備と連携するため、又はシステムコントローラ自体から遠隔で処理センターにアクセスするため、ネットワークを介して通信することができる。
このセクションでは、本開示の移動システム及び位置付けシステムの追加の態様及び特徴が、その使用法を含めて説明されている。このセクションは、限定されずに一連の段落として提示されており、この一連の段落の一部又は全部は、明確性及び効率のために英数字で指定され得る。これらの各段落は、任意の適した方法で、1つ若しくは複数の他の段落、及び/又は本出願の他の部分からの開示(相互参照の参照により組み込まれた資料を含む)と組み合わせることができる。以下の段落の幾つかは、明確に他の段落に言及し、さらに他の段落を限定することにより、非限定的に、好適な組み合わせの幾つかの例を提供するものである。
ビークルのビークル構成要素をビークルの構造体に設置する間に、ビークル構成要素を構造体に対して動かすためのシステムであって、
基部の構成要素湾領域の両側で前記基部に取り付けられた、離間された第1の支持体及び第2の支持体であって、前記基部から上方に延びている、第1の支持体及び第2の支持体、
ビーム軸に沿って、前記第1の支持体と前記第2の支持体との間で延びるクロスビーム、及び前記クロスビームに固定された一対の離間した上反りのトラスアセンブリであって、前記ビークル構成要素に取り付けられ、前記クロスビームに対して前記ビークル構成要素を支持するように構成されたトラスアセンブリを含むリフトフレーム、
前記第1の支持体及び前記第2の支持体に対する前記クロスビームの回転のために前記クロスビームを支持するように構成された、前記第1の支持体及び前記第2の支持体上の第1のクロスビーム支持アセンブリ及び第2のクロスビーム支持アセンブリであって、前記第1の支持体及び前記第2の支持体に沿って動くことが可能である、第1のクロスビーム支持アセンブリ及び第2のクロスビーム支持アセンブリ、
第1の制御信号に応答して、前記第1の支持体に沿って前記第1のクロスビーム支持アセンブリを動かすように構成された第1のリフト機構、
第2の制御信号に応答して、前記第1のクロスビーム支持アセンブリ及び前記第2のクロスビーム支持アセンブリに対して、前記クロスビームを前記ビーム軸の周りで回転させるように構成された回転駆動機構、並びに
前記第1のリフト機構及び前記回転駆動機構に動作可能に連結された電子コントローラであって、前記第1の支持体に沿って前記第1のクロスビーム支持アセンブリを動かすように前記第1のリフト機構の動作を制御する前記第1の制御信号を生成し、前記第1のクロスビーム支持アセンブリに対して、前記クロスビームを回転させるように前記回転駆動機構の動作を制御する前記第2の制御信号を生成し、それにより、前記ビークルに対する前記ビークル構成要素の位置を変更するように構成された電子コントローラ
を備えているシステム。
前記電子コントローラが、前記ビークル構成要素の目的位置に関連付けられた入力情報を受信し、受信した前記入力情報に応答して、前記第1の支持体に沿って前記第1のクロスビーム支持アセンブリを動かすように前記第1のリフト機構の動作を制御するための前記第1の制御信号を生成し、前記クロスビームを前記第1のクロスビーム支持アセンブリに対して回転させ、前記ビークル構成要素が前記リフトフレームによって支持されているときに、前記ビークル構成要素を回転的に位置付けするように前記回転駆動機構の動作を制御するための前記第2の制御信号を生成するように構成されている、段落A1に記載のシステム。
前記第1のクロスビーム支持アセンブリ及び前記第2のクロスビーム支持アセンブリが、前記第1の支持体と前記第2の支持体との間で延びる、前記クロスビームを囲む管状外側支持ビームを含む、段落A1に記載のシステム。
前記第1の支持体、前記第1のクロスビーム支持アセンブリ、及び前記クロスビームは、前記クロスビームが、前記ビーム軸に対して直交する第1のピボット軸の周りで枢動することを可能にするように集合的に構成されている、段落A1に記載のシステム。
前記第1のクロスビーム支持アセンブリが、前記クロスビームを支持する第1のクロスビーム支持要素、前記第1の支持体に沿った第1のリフトラインに沿った動きのために前記第1のリフト機構によって支持された第1の支持部材、及び前記第1のクロスビーム支持要素を前記第1の支持部材に枢動的に連結するピボットピンを含む、段落A4に記載のシステム。
前記第1のクロスビーム支持アセンブリが、前記第1のクロスビーム支持要素及び前記第1の支持部材のうちの片方に固定的に取り付けられたスリーブをさらに含み、前記ピボットピンが、前記スリーブ内で枢動的に支持され、前記第1のクロスビーム支持要素及び前記第1の支持部材のうちの他方によって支持されている、段落A5に記載のシステム。
前記第1の支持体、前記第1のクロスビーム支持アセンブリ、及び前記クロスビームは、前記クロスビームが、前記第1の支持体の側方に動くことを可能にするように集合的に構成されている、段落A1に記載のシステム。本実施例における「第1の支持体」及び「第1のクロスビーム支持アセンブリ」については、1つの支持体及びクロスビーム支持アセンブリのみがこの組み合わせで記載されているので、それぞれ上述の「第2の支持体」及び「第2のクロスビーム支持アセンブリ」に言及することを理解するべきである。
第3の制御信号に応答して、前記第2の支持体に沿って前記第2のクロスビーム支持アセンブリを動かすように構成された第2のリフト機構をさらに備え、前記電子コントローラが、前記第2のリフト機構に動作可能に連結され、前記第2の支持体に沿って前記第2のクロスビーム支持アセンブリを動かすように前記第2のリフト機構の動作を制御する前記第3の制御信号を生成し、それにより、前記ビークルに対する前記ビークル構成要素の位置を変更するように構成されている、段落A1に記載のシステム。
ビークルのビークル構成要素を前記ビークルの構造体に設置する間に、前記ビークル構成要素を前記構造体に対して動かす方法であって、
リフトフレームを前記ビークル構成要素に取り付けるステップであって、前記リフトフレームが、クロスビーム、及び前記クロスビームに取り付けられた一対の離間した上反りのトラスアセンブリを含み、前記リフトフレームを前記ビークル構成要素に取り付けることが、複数の離間された位置で前記一対のトラスアセンブリを前記ビークル構成要素に固定することを含む、取り付けるステップ、
第1のクロスビーム支持アセンブリで前記クロスビームの第1の端部を支持するステップ、
第1の制御信号に応答して、作業面に支持された基部に取り付けられ且つ前記基部から上方に延びる第1の支持体に沿って、前記第1のクロスビーム支持アセンブリを動かすことによって、第1のリフト機構により前記ビークル構成要素を動かすステップ、
前記ビークルに対して前記ビークル構成要素の配向を変更するために、第2の制御信号に応答して、前記第1のクロスビーム支持アセンブリに対して、前記リフトフレーム及び取り付けられた前記ビークル構成要素を、ビーム軸の周りで回転駆動機構によって回転させるステップ、並びに
電子コントローラによって、前記第1の支持体に沿って前記第1のクロスビーム支持アセンブリを動かすように前記第1のリフト機構の動作を制御する前記第1の制御信号、及び前記第1のクロスビーム支持アセンブリに対して、前記リフトフレーム及び前記取り付けられたビークル構成要素を回転させるように前記回転駆動機構の動作を制御するための前記第2の制御信号を生成することによって、前記ビークルに対する前記ビークル構成要素の前記配向を変更するステップ
を含む方法。
前記ビークル構造体上のターゲット設置点に対する、前記ビークル構成要素の近傍に位置付けされた第1のレーザ及び第2のレーザの位置合わせに関連する入力情報を、前記電子コントローラによって受信するステップであって、前記入力情報が、前記ビークル構造体に対する前記ビークル構成要素の目的位置及び配向を表す、受信するステップ、
受信した前記入力情報に応答して、前記第1の支持体に沿って前記第1のクロスビーム支持アセンブリを動かすように前記第1のリフト機構の動作を制御するための前記第1の制御信号を、前記電子コントローラによって生成するステップ、
前記受信した入力情報に応答して、前記第1のクロスビーム支持アセンブリに対して、前記クロスビーム及び取り付けられた前記ビークル構成要素を回転させるように前記回転駆動機構の動作を制御するための前記第2の制御信号を、前記電子コントローラによって生成するステップ
をさらに含む、段落B1に記載の方法。
前記ビークル構成要素の目的位置に関連付けられた入力情報を前記電子コントローラによって受信するステップ、
受信した前記入力情報に応答して、前記第1の支持体に沿って前記第1のクロスビーム支持アセンブリを動かすように前記第1のリフト機構の動作を制御するための前記第1の制御信号を生成するステップ、及び
前記クロスビームを前記第1のクロスビーム支持アセンブリに対して回転させ、前記ビークル構成要素が前記リフトフレームによって支持されているときに、前記ビークル構成要素を回転的に位置付けするように前記回転駆動機構の動作を制御するための前記第2の制御信号を生成するステップ
をさらに含む、段落B1に記載の方法。
前記第1の支持体に沿って前記第1のクロスビーム支持アセンブリを動かすステップが、前記ビーム軸に対して直交する第1のピボット軸の周りで前記クロスビームを前記第1の支持体に対して枢動させるステップを含む、段落B1に記載の方法。
前記クロスビームを前記第1の支持体に対して枢動させるステップが、第1のクロスビーム支持要素によって前記クロスビームを支持するステップ、前記第1の支持体に沿った第1のリフトラインに沿った動きのために、前記第1のリフト機構によって、第1の支持部材を支持するステップ、及び前記第1のクロスビーム支持要素を前記第1の支持部材に枢動的に連結するピボットピンの周りで前記第1のクロスビーム支持要素を枢動させるステップを含む、段落B4に記載の方法。
前記第1のリフトラインに対して直交する側方ラインに沿って、前記第1のクロスビーム支持要素を前記第1の支持部材に対して動かすステップをさらに含む、段落B5に記載の方法。
前記クロスビームを前記第1の支持体の側方に動かすステップをさらに含む、段落B1に記載の方法。
前記基部に取り付けられ且つ前記基部から上方に延びる第2の支持体に沿って動かすことが可能な第2のクロスビーム支持アセンブリで、前記クロスビームの第2の端部を支持するステップ、
第3の制御信号に応答して、第2のリフト機構によって、前記第2の支持体に沿って前記第2のクロスビーム支持アセンブリを動かすステップ、及び
前記第2の支持体に沿って前記第2のクロスビーム支持アセンブリを動かすように前記第2のリフト機構の動作を制御する前記第3の制御信号を、前記電子コントローラによって生成し、それにより、前記ビークルに対する前記ビークル構成要素の位置を変更するステップ
をさらに含む、段落B1に記載の方法。
ビークルのビークル構成要素をビークルの構造体に設置する間に、ビークル構成要素を構造体に対して動かすためのシステムであって、
基部の構成要素湾領域の両側で前記基部に取り付けられた、離間された第1の支持体及び第2の支持体であって、前記基部から上方に延びている、第1の支持体及び第2の支持体、
前記第1の支持体と前記第2の支持体との間でクロスビームラインに沿って延びるクロスビーム、及び前記クロスビームに固定された一対の離間した上反りのトラスアセンブリであって、前記ビークル構成要素に取り付けられ、前記クロスビームに対して前記ビークル構成要素を支持するように構成されたトラスアセンブリを含むリフトフレーム、
前記第1の支持体及び前記第2の支持体に対して前記クロスビームを支持するように構成された、前記第1の支持体及び前記第2の支持体上の第1のクロスビーム支持アセンブリ及び第2のクロスビーム支持アセンブリであって、前記第1の支持体及び前記第2の支持体に沿って動くことが可能である、第1のクロスビーム支持アセンブリ及び第2のクロスビーム支持アセンブリ、
第1の制御信号に応答して、前記第1の支持体に沿って前記第1のクロスビーム支持アセンブリを動かすように構成された第1のリフト機構、
第2の制御信号に応答して、前記第2の支持体に沿って前記第2のクロスビーム支持アセンブリを動かすように構成された第2のリフト機構、並びに
前記第1のリフト機構及び前記第2のリフト機構に動作可能に連結された電子コントローラであって、前記第1の支持体に沿って前記第1のクロスビーム支持アセンブリを動かすように前記第1のリフト機構の動作を制御する前記第1の制御信号を生成し、前記第2の支持体に沿って前記第2のクロスビーム支持アセンブリを動かすように前記第2のリフト機構の動作を制御する前記第2の制御信号を生成し、それにより、前記ビークルに対する前記ビークル構成要素の位置を変更するように構成された電子コントローラ
を備えているシステム。
前記電子コントローラが、前記ビークル構成要素の目的位置に関連付けられた入力情報を受信し、受信した前記入力情報に応答して、前記第1の支持体に沿って前記第1のクロスビーム支持アセンブリを動かすように前記第1のリフト機構の動作を制御するための前記第1の制御信号を生成し、前記第2の支持体に沿って前記第2のクロスビーム支持アセンブリを動かすように前記第2のリフト機構の動作を制御するための前記第2の制御信号を生成するように構成されている、段落C1に記載のシステム。
前記第1の支持体、前記第1のクロスビーム支持アセンブリ、及び前記クロスビームは、前記クロスビームが、前記クロスビームラインに対して直交する第1のピボット軸の周りで枢動することを可能にするように集合的に構成されている、段落C1に記載のシステム。
前記第1の支持体、前記第1のクロスビーム支持アセンブリ、及び前記クロスビームは、前記クロスビームが、前記第1の支持体の側方に動くことを可能にするように集合的に構成されている、段落C1に記載のシステム。本実施例における「第1の支持体」及び「第1のクロスビーム支持アセンブリ」については、1つの支持体及びクロスビーム支持アセンブリのみがこの組み合わせで記載されているので、それぞれ上述の「第2の支持体」及び「第2のクロスビーム支持アセンブリ」に言及することを理解するべきである。
ビークルのビークル構成要素をビークルの構造体に設置する間に、ビークル構成要素を構造体に対して動かすためのシステムであって、
基部の構成要素湾領域の両側で前記基部に取り付けられた、離間された第1の支持体及び第2の支持体であって、前記基部から上方に延びている、第1の支持体及び第2の支持体、
ビーム軸に沿って、前記第1の支持体と前記第2の支持体との間で延びるクロスビーム、及び前記クロスビームに固定された一対の離間した上反りのトラスアセンブリであって、前記ビークル構成要素に取り付けられ、前記クロスビームに対して前記ビークル構成要素を支持するように構成されたトラスアセンブリを含むリフトフレーム、
前記第1の支持体及び前記第2の支持体に対する前記クロスビームの回転のために前記クロスビームを支持するように構成された、前記第1の支持体及び前記第2の支持体上の第1のクロスビーム支持アセンブリ及び第2のクロスビーム支持アセンブリであって、前記第1の支持体及び前記第2の支持体に沿って動くことが可能である、第1のクロスビーム支持アセンブリ及び第2のクロスビーム支持アセンブリ、
第1の制御信号に応答して、前記第1の支持体に沿って前記第1のクロスビーム支持アセンブリを動かすように構成された第1のリフト機構、
第2の制御信号に応答して、前記第1のクロスビーム支持アセンブリ及び前記第2のクロスビーム支持アセンブリに対して、前記クロスビームを前記ビーム軸の周りで回転させるように構成された回転駆動機構、並びに
前記第1のリフト機構及び前記回転駆動機構に動作可能に連結された電子コントローラであって、前記第1の支持体に沿って前記第1のクロスビーム支持アセンブリを動かすように前記第1のリフト機構の動作を制御する前記第1の制御信号を生成し、前記第1のクロスビーム支持アセンブリに対して、前記クロスビームを回転させるように前記回転駆動機構の動作を制御する前記第2の制御信号を生成し、それにより、前記ビークルに対する前記ビークル構成要素の位置を変更するように構成された電子コントローラ
を備えているシステム。
前記電子コントローラが、前記ビークル構成要素の目的位置に関連付けられた入力情報を受信し、受信した前記入力情報に応答して、前記第1の支持体に沿って前記第1のクロスビーム支持アセンブリを動かすように前記第1のリフト機構の動作を制御するための前記第1の制御信号を生成し、前記クロスビームを前記第1のクロスビーム支持アセンブリに対して回転させ、前記ビークル構成要素が前記リフトフレームによって支持されているときに、前記ビークル構成要素を回転的に位置付けするように前記回転駆動機構の動作を制御するための前記第2の制御信号を生成するように構成されている、段落D1に記載のシステム。
前記第1のクロスビーム支持アセンブリ及び前記第2のクロスビーム支持アセンブリが、前記第1の支持体と前記第2の支持体との間で延びる、前記クロスビームを囲む管状外側支持ビームを含む、段落D1に記載のシステム。
前記一対のトラスアセンブリの各トラスアセンブリが、前記支持ビームにおける開口を通してクロスビームから延びる、段落D3に記載のシステム。
前記第1の支持体、前記第1のクロスビーム支持アセンブリ、及び前記クロスビームは、前記クロスビームが、前記ビーム軸に対して直交する第1のピボット軸の周りで枢動することを可能にするように集合的に構成されている、段落D1に記載のシステム。
前記第1のクロスビーム支持アセンブリが、前記クロスビームを支持する第1のクロスビーム支持要素、前記第1の支持体に沿った第1のリフトラインに沿った動きのために前記第1のリフト機構によって支持された第1の支持部材、及び前記第1のクロスビーム支持要素を前記第1の支持部材に枢動的に連結するピボットピンを含む、段落D5に記載のシステム。
前記第1のクロスビーム支持アセンブリが、前記第1のクロスビーム支持要素及び前記第1の支持部材のうちの片方に固定的に取り付けられたスリーブをさらに含み、前記ピボットピンが、前記スリーブ内で枢動的に支持され、前記第1のクロスビーム支持要素及び前記第1の支持部材のうちの他方によって支持されている、段落D6に記載のシステム。
前記第2のクロスビーム支持アセンブリが、前記クロスビームを支持する第2のクロスビーム支持要素、及び前記第2の支持体に沿った第2のリフトラインに沿って動くように構成された第2の支持部材を含み、前記第2のクロスビーム支持要素及び前記第2の支持部材が、前記第2のリフトラインに対して直交する側方ラインに沿って、前記第2のクロスビーム支持要素が前記第2の支持部材に対して動くことを可能にするように構成されている、段落D7に記載のシステム。
前記第2のクロスビーム支持要素及び前記第2の支持部材は、前記第2のクロスビームが、前記ビーム軸に対して直交する第2のピボット軸の周りで、前記第2の支持部材に対して枢動することを可能にするようにさらに構成されている、段落D8に記載のシステム。
前記第1のクロスビーム支持要素及び前記第1の支持部材は、前記第1のリフトラインに対して直交する側方ラインに沿って、前記第1のクロスビーム支持要素が前記第1の支持部材に対して動くことを可能にするように構成されている、段落D6に記載のシステム。
前記第1の支持体、前記第1のクロスビーム支持アセンブリ、及び前記クロスビームは、前記クロスビームが、前記第1の支持体の側方に動くことを可能にするように集合的に構成されている、段落D1に記載のシステム。本実施例における「第1の支持体」及び「第1のクロスビーム支持アセンブリ」については、1つの支持体及びクロスビーム支持アセンブリのみがこの組み合わせで記載されているので、それぞれ上述の「第2の支持体」及び「第2のクロスビーム支持アセンブリ」に言及することを理解するべきである。
第3の制御信号に応答して、前記第2の支持体に沿って前記第2のクロスビーム支持アセンブリを動かすように構成された第2のリフト機構をさらに備え、前記電子コントローラが、前記第2のリフト機構に動作可能に連結され、前記第2の支持体に沿って前記第2のクロスビーム支持アセンブリを動かすように前記第2のリフト機構の動作を制御する前記第3の制御信号を生成し、それにより、前記ビークルに対する前記ビークル構成要素の位置を変更するように構成されている、段落D1に記載のシステム。
ビークルのビークル構成要素を前記ビークルの構造体に設置する間に、前記ビークル構成要素を前記構造体に対して動かす方法であって、
リフトフレームを前記ビークル構成要素に取り付けるステップであって、前記リフトフレームが、クロスビーム、及び前記クロスビームに取り付けられた一対の離間した上反りのトラスアセンブリを含み、前記リフトフレームを前記ビークル構成要素に取り付けることが、複数の離間された位置で前記一対のトラスアセンブリを前記ビークル構成要素に固定することを含む、取り付けるステップ、
第1のクロスビーム支持アセンブリで前記クロスビームの第1の端部を支持するステップ、
第1の制御信号に応答して、作業面に支持された基部に取り付けられ且つ前記基部から上方に延びる第1の支持体に沿って、前記第1のクロスビーム支持アセンブリを動かすことによって、第1のリフト機構により前記ビークル構成要素を動かすステップ、
前記ビークルに対して前記ビークル構成要素の配向を変更するために、第2の制御信号に応答して、前記第1のクロスビーム支持アセンブリに対して、前記リフトフレーム及び取り付けられた前記ビークル構成要素を、ビーム軸の周りで回転駆動機構によって回転させるステップ、並びに
電子コントローラによって、前記第1の支持体に沿って前記第1のクロスビーム支持アセンブリを動かすように前記第1のリフト機構の動作を制御する前記第1の制御信号、及び前記第1のクロスビーム支持アセンブリに対して、前記リフトフレーム及び前記取り付けられたビークル構成要素を回転させるように前記回転駆動機構の動作を制御するための前記第2の制御信号を生成することによって、前記ビークルに対する前記ビークル構成要素の前記配向を変更するステップ
を含む方法。
前記ビークル構造体上のターゲット設置点に対する、前記ビークル構成要素の近傍に位置付けされた第1のレーザ及び第2のレーザの位置合わせに関連する入力情報を、前記電子コントローラによって受信するステップであって、前記入力情報が、前記ビークル構造体に対する前記ビークル構成要素の目的位置及び配向を表す、受信するステップ、
受信した前記入力情報に応答して、前記第1の支持体に沿って前記第1のクロスビーム支持アセンブリを動かすように前記第1のリフト機構の動作を制御するための前記第1の制御信号を、前記電子コントローラによって生成するステップ、並びに
前記受信した入力情報に応答して、前記第1のクロスビーム支持アセンブリに対して、前記クロスビーム及び取り付けられた前記ビークル構成要素を回転させるように前記回転駆動機構の動作を制御するための前記第2の制御信号を、前記電子コントローラによって生成するステップ
をさらに含む、段落E1に記載の方法。
前記ビークル構成要素の目的位置に関連付けられた入力情報を前記電子コントローラによって受信するステップ、
受信した前記入力情報に応答して、前記第1の支持体に沿って前記第1のクロスビーム支持アセンブリを動かすように前記第1のリフト機構の動作を制御するための前記第1の制御信号を生成するステップ、及び
前記クロスビームを前記第1のクロスビーム支持アセンブリに対して回転させ、前記ビークル構成要素が前記リフトフレームによって支持されているときに、前記ビークル構成要素を回転的に位置付けするように前記回転駆動機構の動作を制御するための前記第2の制御信号を生成するステップ
をさらに含む、段落E1に記載の方法。
前記第1のクロスビーム支持アセンブリで前記クロスビームの前記第1の端部を支持するステップが、前記クロスビームを管状外側支持ビーム内に囲むステップをさらに含む、段落E1に記載の方法。
前記第1のクロスビーム支持アセンブリに対して、前記リフトフレームの前記クロスビーム及び前記取り付けられたビークル構成要素を回転させるステップが、前記一対のトラスアセンブリの各トラスアセンブリを、前記支持ビームにおける開口を通して前記クロスビームから延ばすステップを含む、段落E4に記載の方法。
前記第1の支持体に沿って前記第1のクロスビーム支持アセンブリを動かすステップが、前記ビーム軸に対して直交する第1のピボット軸の周りで前記クロスビームを前記第1の支持体に対して枢動させるステップを含む、段落E1に記載の方法。
前記クロスビームを前記第1の支持体に対して枢動させるステップが、第1のクロスビーム支持要素によって前記クロスビームを支持するステップ、前記第1の支持体に沿った第1のリフトラインに沿った動きのために、前記第1のリフト機構によって、第1の支持部材を支持するステップ、及び前記第1のクロスビーム支持要素を前記第1の支持部材に枢動的に連結するピボットピンの周りで前記第1のクロスビーム支持要素を枢動させるステップを含む、段落E6に記載の方法。
前記クロスビーム支持要素を前記ピボットピンの周りで枢動させるステップが、前記第1のクロスビーム支持要素及び前記第1の支持部材のうちの片方に固定的に取り付けられたスリーブ内で前記ピボットピンを枢動させるステップを含む、段落E7に記載の方法。
前記基部に取り付けられ且つ前記基部から上方に延びる第2の支持体に沿って動かすことが可能な第2のクロスビーム支持アセンブリで、前記クロスビームの第2の端部を支持するステップであって、前記第2のクロスビーム支持アセンブリが、前記クロスビームの前記第2の端部を支持する第2のクロスビーム支持要素、及び前記第2の支持体に沿った第2のリフトラインに沿った動きのために支持された第2の支持部材を含む、支持するステップ、並びに
前記第2のリフトラインに対して直交する側方ラインに沿って、前記第2のクロスビーム支持要素を前記第2の支持部材に対して動かすステップ
をさらに含む、段落E8に記載の方法。
前記第2のクロスビーム支持要素を、前記ビーム軸に対して直交する第2のピボット軸の周りで、前記第2の支持部材に対して枢動させるステップをさらに含む、段落E9に記載の方法。
前記第1のリフトラインに対して直交する側方ラインに沿って、前記第1のクロスビーム支持要素を前記第1の支持部材に対して動かすステップをさらに含む、段落E7に記載の方法。
前記クロスビームを前記第1の支持体の側方に動かすステップをさらに含む、段落E1に記載の方法。
前記基部に取り付けられ且つ前記基部から上方に延びる第2の支持体に沿って動かすことが可能な第2のクロスビーム支持アセンブリで、前記クロスビームの第2の端部を支持するステップ、
第3の制御信号に応答して、第2のリフト機構によって、前記第2の支持体に沿って前記第2のクロスビーム支持アセンブリを動かすステップ、及び
前記第2の支持体に沿って前記第2のクロスビーム支持アセンブリを動かすように前記第2のリフト機構の動作を制御する前記第3の制御信号を、前記電子コントローラによって生成し、それにより、前記ビークルに対する前記ビークル構成要素の位置を変更するステップ
をさらに含む、段落E1に記載の方法。
ビークルのビークル構成要素をビークルの構造体に設置する間に、ビークル構成要素を構造体に対して動かすためのシステムであって、
基部の構成要素湾領域の両側で前記基部に取り付けられた、離間された第1の支持体及び第2の支持体であって、前記基部から上方に延びている、第1の支持体及び第2の支持体、
前記第1の支持体と前記第2の支持体との間でクロスビームラインに沿って延びるクロスビーム、及び前記クロスビームに固定された一対の離間した上反りのトラスアセンブリであって、前記ビークル構成要素に取り付けられ、前記クロスビームに対して前記ビークル構成要素を支持するように構成されたトラスアセンブリを含むリフトフレーム、
前記第1の支持体及び前記第2の支持体に対して前記クロスビームを支持するように構成された、前記第1の支持体及び前記第2の支持体上の第1のクロスビーム支持アセンブリ及び第2のクロスビーム支持アセンブリであって、前記第1の支持体及び前記第2の支持体に沿って動くことが可能である、第1のクロスビーム支持アセンブリ及び第2のクロスビーム支持アセンブリ、
第1の制御信号に応答して、前記第1の支持体に沿って前記第1のクロスビーム支持アセンブリを動かすように構成された第1のリフト機構、
第2の制御信号に応答して、前記第2の支持体に沿って前記第2のクロスビーム支持アセンブリを動かすように構成された第2のリフト機構、並びに
前記第1のリフト機構及び前記第2のリフト機構に動作可能に連結された電子コントローラであって、前記第1の支持体に沿って前記第1のクロスビーム支持アセンブリを動かすように前記第1のリフト機構の動作を制御する前記第1の制御信号を生成し、前記第2の支持体に沿って前記第2のクロスビーム支持アセンブリを動かすように前記第2のリフト機構の動作を制御する前記第2の制御信号を生成し、それにより、前記ビークルに対する前記ビークル構成要素の位置を変更するように構成された電子コントローラ
を備えているシステム。
前記電子コントローラが、前記ビークル構成要素の目的位置に関連付けられた入力情報を受信し、受信した前記入力情報に応答して、前記第1の支持体に沿って前記第1のクロスビーム支持アセンブリを動かすように前記第1のリフト機構の動作を制御するための前記第1の制御信号を生成し、前記第2の支持体に沿って前記第2のクロスビーム支持アセンブリを動かすように前記第2のリフト機構の動作を制御するための前記第2の制御信号を生成するように構成されている、段落F1に記載のシステム。
前記第1のクロスビーム支持アセンブリ及び前記第2のクロスビーム支持アセンブリが、前記第1の支持体と前記第2の支持体との間で延びる、前記クロスビームを囲む管状外側支持ビームを含む、段落F1に記載のシステム。
前記一対のトラスアセンブリの各トラスアセンブリが、前記支持ビームにおける開口を通してクロスビームから延びる、段落F3に記載のシステム。
前記第1の支持体、前記第1のクロスビーム支持アセンブリ、及び前記クロスビームは、前記クロスビームが、前記クロスビームラインに対して直交する第1のピボット軸の周りで枢動することを可能にするように集合的に構成されている、段落F1に記載のシステム。
前記第1のクロスビーム支持アセンブリが、前記クロスビームを支持する第1のクロスビーム支持要素、前記第1の支持体に沿った前記第1のリフトラインに沿った動きのために前記第1のリフト機構によって支持された第1の支持部材、及び前記第1のクロスビーム支持要素を前記第1の支持部材に枢動的に連結するピボットピンを含む、段落F5に記載のシステム。
前記第1のクロスビーム支持アセンブリが、前記第1のクロスビーム支持要素及び前記第1の支持部材のうちの片方に固定的に取り付けられたスリーブをさらに含み、前記ピボットピンが、前記スリーブ内で枢動的に支持され、前記第1のクロスビーム支持要素及び前記第1の支持部材のうちの他方によって支持されている、段落F6に記載のシステム。
前記第2のクロスビーム支持アセンブリが、前記クロスビームを支持する第2のクロスビーム支持要素、及び前記第2の支持体に沿った第2のリフトラインに沿った動きのために前記第2のリフト機構によって支持された第2の支持部材を含み、前記第2のクロスビーム支持要素及び前記第2の支持部材が、前記第2のリフトラインに対して直交する側方ラインに沿って、前記第2のクロスビーム支持要素が前記第2の支持部材に対して動くことを可能にするように構成されている、段落F7に記載のシステム。
前記第2のクロスビーム支持要素及び前記第2の支持部材は、前記第2のクロスビームが、前記クロスビームラインに対して直交する第2のピボット軸の周りで、前記第2の支持部材に対して枢動することを可能にするようにさらに構成されている、段落F8に記載のシステム。
前記第1のクロスビーム支持要素及び前記第1の支持部材は、前記第1のリフトラインに対して直交する側方ラインに沿って、前記第1のクロスビーム支持要素が前記第1の支持部材に対して動くことを可能にするように構成されている、段落F6に記載のシステム。
前記第1の支持体、前記第1のクロスビーム支持アセンブリ、及び前記クロスビームは、前記クロスビームが、前記第1の支持体の側方に動くことを可能にするように集合的に構成されている、段落F1に記載のシステム。本実施例における「第1の支持体」及び「第1のクロスビーム支持アセンブリ」については、1つの支持体及びクロスビーム支持アセンブリのみがこの組み合わせで記載されているので、それぞれ上述の「第2の支持体」及び「第2のクロスビーム支持アセンブリ」に言及することを理解するべきである。
ビークルのビークル構成要素を前記ビークルの構造体に設置する間に、前記ビークル構成要素を前記構造体に対して動かす方法であって、
前記ビークル構成要素をリフトフレームに取り付けるステップであって、前記リフトフレームが、クロスビーム、及び前記クロスビームに固定され、複数の離間された位置で前記ビークル構成要素に取り付けられた一対の上反りのトラスアセンブリを含む、取り付けるステップ、
第1のクロスビーム支持アセンブリ及びクロスビーム支持アセンブリで、作業面に支持された基部に取り付けられ且つ前記基部から上方に延びる第1の支持体及び第2の支持体に対して前記クロスビームを支持するステップ、
第1の制御信号に応答して、前記第1の支持体に沿って、前記第1のクロスビーム支持アセンブリを動かすことによって、第1のリフト機構により前記ビークル構成要素を動かすステップ、並びに
第2の制御信号に応答して、前記第2の支持体に沿って、前記第2のクロスビーム支持アセンブリを動かすことによって、第2のリフト機構により前記ビークル構成要素を動かすステップ
を含む方法。
電子コントローラによって、前記第1の支持体に沿って前記第1のクロスビーム支持アセンブリを動かすように前記第1のリフト機構の動作を制御するための前記第1の制御信号を生成し、前記第2の支持体に沿って前記第2のクロスビーム支持アセンブリを動かすように前記第2のリフト機構の動作を制御するための前記第2の制御信号を生成するステップをさらに含む、段落G1に記載の方法。
前記ビークル構造体上のターゲット設置点に対する、前記ビークル構成要素の近傍に位置付けされた第1のレーザ及び第2のレーザの位置合わせに関連する入力情報を、電子コントローラによって受信するステップであって、前記入力情報が、前記ビークル構造体の目的位置を表す、受信するステップ、
受信した前記入力情報に応答して、前記第1の支持体に沿って前記第1のクロスビーム支持アセンブリを動かすように前記第1のリフト機構の動作を制御するための前記第1の制御信号を、前記電子コントローラによって生成するステップ、並びに
前記受信した入力情報に応答して、前記第2の支持体に沿って前記第2のクロスビーム支持アセンブリを動かすように前記第2のリフト機構の動作を制御するための前記第2の制御信号を、前記電子コントローラによって生成するステップ
をさらに含む、段落G1に記載の方法。
前記第1の支持体に沿って前記第1のクロスビーム支持アセンブリを動かすステップが、前記第1のクロスビーム支持アセンブリと前記第2のクロスビーム支持アセンブリとの間で前記クロスビームに沿って延びるクロスビームラインに対して直交する第1のピボット軸の周りで前記クロスビームを前記第1の支持体に対して枢動させるステップを含む、段落G1に記載の方法。
前記クロスビームを前記第1の支持体に対して枢動させるステップが、第1のクロスビーム支持要素によって前記クロスビームを支持するステップ、前記第1の支持体に沿った第1のリフトラインに沿った動きのために、前記第1のリフト機構によって、第1の支持部材を支持するステップ、及び前記第1のクロスビーム支持要素を前記第1の支持部材に枢動的に連結するピボットピンの周りで、前記クロスビームを支持する前記第1のクロスビーム支持要素を枢動させるステップを含む、段落G4に記載の方法。
前記ピボットピンの周りで枢動させるように前記クロスビームを支持するステップが、前記第1のクロスビーム支持要素及び前記第1の支持部材のうちの片方に固定的に取り付けられたスリーブ内で前記ピボットピンを枢動的に支持するステップを含む、段落G5に記載の方法。
前記第2のクロスビームアセンブリで前記クロスビームを支持するステップが、第2のクロスビーム支持要素で前記クロスビームを支持し、前記第2の支持体に沿った第2のリフトラインに沿った動きのために第2の支持部材を支持するステップを含み、前記方法が、前記第2のリフトラインに対して直交する側方ラインに沿って、前記第2のクロスビーム支持要素を前記第2の支持部材に対して動かすステップをさらに含む、段落G6に記載の方法。
前記第2のクロスビーム支持要素を、前記クロスビームラインに対して直交する第2のピボット軸の周りで、前記第2の支持部材に対して枢動させるステップをさらに含む、段落G7に記載の方法。
前記第1のリフトラインに対して直交する側方ラインに沿って、前記第1のクロスビーム支持要素を前記第1の支持部材に対して動かすステップをさらに含む、段落G5に記載の方法。
前記クロスビームを前記第1の支持体の側方に動かすステップをさらに含む、段落G1に記載の方法。
前記第1のクロスビーム支持アセンブリで前記クロスビームの前記第1の端部を支持するステップが、前記クロスビームを管状外側支持ビーム内に囲むステップをさらに含む、段落G1に記載の方法。
前記第1のクロスビーム支持アセンブリで前記クロスビームの前記第1の端部を支持するステップが、前記一対のトラスアセンブリの各トラスアセンブリを、前記支持ビームにおける開口を通して前記クロスビームから延ばすステップをさらに含む、段落G11に記載の方法。
航空機のエンジンへの取り付けのために、エンジン構成要素を位置付けするための位置付けシステムであって、
基部の構成要素湾領域の両側で前記基部に取り付けられるように構成された一対の離間された直立支持体、
フレームクロスビーム、及びそれぞれの頂点を有する一対の上反りのトラスを含むリフトフレームであって、前記トラスが、離間されたそれぞれの位置でその頂点において前記フレームクロスビームに固定され、離間されたそれぞれの位置で前記エンジン構成要素に固定された遠位端を有する、フレームクロスビーム、
クロスビーム支持体であって、当該クロスビーム支持体に対する回転のために前記フレームクロスビームが、当該クロスビーム支持体上で支持され、当該クロスビーム支持体が、前記一対の直立支持体によって支持され、前記一対の直立支持体に沿った相対運動のために構成されている、クロスビーム支持体、
前記一対の直立支持体のうちの少なくとも1つの直立支持体に沿って前記クロスビーム支持体を動かすように構成されたリフト機構、
前記フレームクロスビームを前記クロスビーム支持体に対して回転させるように構成された回転駆動部、
基準線に沿って既知の距離で第1のレーザ及び第2のレーザを支持するように構成されたレーザアセンブリであって、当該レーザアセンブリが、前記基準ラインが垂直に配向された状態で、前記エンジン構成要素に対して位置付けされるように構成され、前記第1のレーザ及び前記第2のレーザが、前記基準ラインを含むそれぞれの平面において個々に調節可能であることにより、前記第1のレーザ及び前記第2のレーザのそれぞれのレーザビームが、前記航空機エンジンに関連付けられたターゲット位置と位置合わせされ、当該レーザアセンブリが、前記基準ラインに対する、前記第1のレーザの前記レーザビームの第1の角度を表す第1の指標、及び前記基準ラインに対する、前記第2のレーザの前記レーザビームの第2の角度を表す第2の指標を提供する、レーザアセンブリ、並びに
システムコントローラであって、(a)前記回転駆動部の動作を制御して、前記クロスビーム支持体に対して前記フレームクロスビームを回転させ、前記リフトフレームに固定された前記エンジン構成要素を回転的に位置付けし、(b)前記第1の角度及び前記第2の角度と、前記既知の距離とに少なくとも部分的に基づいて、前記エンジン構成要素と前記航空機上の前記ターゲット位置との間の垂直距離を判定し、且つ(c)前記リフト機構の動作を制御して、前記エンジン構成要素と前記エンジンとの間の前記垂直距離を短縮させる方向で、前記少なくとも1つの直立支持体に沿って前記クロスビーム支持体を動かすように構成されたシステムコントローラ
を備えている位置付けシステム。
前記クロスビーム支持体が、前記一対の直立支持体の間にまたがる、段落H1に記載の位置付けシステム。
前記システムコントローラに連結され、前記作業面に沿って前記基部を動かすように構成された基部駆動機構をさらに備え、前記システムコントローラが、(a)前記第1の角度及び前記第2の角度、並びに前記既知の距離に少なくとも部分的に基づいて、前記エンジン構成要素と前記航空機上の前記ターゲット位置との間の水平距離を判定し、且つ(b)前記基部駆動機構の動作を制御して、前記エンジン構成要素と前記エンジンとの間の前記水平距離を短縮させる方向で、前記作業面に沿って前記基部を動かすように構成されている、段落H1に記載の位置付けシステム。
前記エンジン構成要素が、前記航空機上の第1のヒンジ構成要素、及び前記エンジン構成要素上の第2のヒンジ構成要素を含むヒンジで、前記航空機に取り付けられ、前記航空機上の前記ターゲット位置が、前記第1のヒンジ構成要素の位置であり、前記第1のレーザが前記第2のヒンジ構成要素の近傍に位置付けされた状態で、前記レーザアセンブリが、前記エンジン構成要素に対して位置付けされるように構成されている、段落H1に記載の位置付けシステム。
前記レーザアセンブリは、前記第1のレーザが前記第2のヒンジ構成要素の近傍に位置付けされた状態で、展開構成で前記第1のレーザ及び前記第2のレーザを支持するように構成され、さらに前記第1のレーザ及び前記第2のレーザが前記エンジン構成要素から離間された引き込み構成で、前記第1のレーザ及び前記第2のレーザを支持するよう調整されるように構成されている、段落H4に記載の位置付けシステム。
前記システムコントローラは、前記レーザが前記引き込み構成である間、前記基部駆動機構の動作を制御するように構成されている、段落H5に記載の位置付けシステム。
航空機のエンジンへの取り付けのためにエンジン構成要素を位置付けする方法であって、
前記エンジン構成要素をリフトフレームに取り付けるステップであって、前記リフトフレームが、フレームクロスビーム、及びそれぞれの頂点を有する一対の上反りのトラスを含み、前記トラスが、離間されたそれぞれの位置でその頂点において前記フレームクロスビームに固定され、離間されたそれぞれの位置で前記エンジン構成要素に固定された遠位端を有する、取り付けるステップ、
クロスビーム支持体を動かすことによって、リフト機構により前記エンジン構成要素を動かすステップであって、前記クロスビーム支持体の内部で前記フレームクロスビームが支持され、前記クロスビーム支持体が、基部から上方に延びる2つの直立支持体の沿った相対的運動のために構成されている、動かすステップ、
回転駆動部によって、前記リフトフレーム、及び取り付けられた前記エンジン構成要素を前記クロスビーム支持体に対して回転させ、前記エンジンに対して前記エンジン構成要素を配向させるステップ、
前記エンジン構成要素の近傍で既知の距離だけ垂直に離間された第1のレーザ及び第2のレーザを支持するステップ、
前記第1のレーザによって発せられた第1のレーザビーム、及び前記第2のレーザによって発生された第2のレーザビームを前記航空機エンジンに関連付けられた前記航空機のターゲット位置に方向付けるステップ、
前記第1のレーザ及び前記第2のレーザを含む基準ラインに対する前記第1のレーザビームの第1の角度、及び前記基準ラインに対する前記第2のレーザビームの第2の角度を決定するステップ、
プロセッサを有する電子システムコントローラによって、前記第1の角度及び前記第2の角度、並びに前記既知の距離に少なくとも部分的に基づいて、前記第1のレーザと前記航空機上の前記ターゲット位置との間の垂直距離を判定するステップ、並びに
前記リフト機構の動作を制御して、前記エンジン構成要素と前記エンジンとの間の前記垂直距離を短縮させる方向で、前記少なくとも1つの直立支持体に沿って前記クロスビーム支持体を動かすステップ
を含む方法。
(a)システムコントローラにより、前記第1の角度及び前記第2の角度、並びに前記既知の距離に少なくとも部分的に基づいて、前記エンジン構成要素と前記航空機上の前記ターゲット位置との間の水平距離を判定するステップ、並びに
(b)基部駆動機構の動作を制御するステップであって、前記基部駆動機構が、前記システムコントローラに連結され、前記エンジン構成要素と前記エンジンとの間の水平距離を短縮させる方向で、作業面に沿って前記基部を動かすように、前記作業面に沿って前記基部を動かすように構成されている、制御するステップ
をさらに含む、段落I1に記載の方法。
前記第1のレーザビームの前記第1の角度、及び前記第2のレーザビームの前記第2の角度を決定した後、且つ前記基部駆動機構の動作を制御して前記作業面に沿って前記クロスビーム支持体を動かす前に、前記第1のレーザ及び前記第2のレーザを前記エンジン構成要素から離すように移動させることをさらに含む、段落I2に記載の方法。
前記エンジン構成要素の近傍で前記第1のレーザ及び前記第2のレーザを支持するステップは、前記エンジン構成要素を前記航空機に取り付けるのに使用されるヒンジの第1のヒンジ構成要素の近傍に前記第1のレーザを位置付けするステップであって、前記ヒンジが、前記エンジン構成要素上の前記第1のヒンジ構成要素、及び前記航空機上の第2のヒンジ構成要素を含み、前記航空機上の前記ターゲット位置が、前記第2のヒンジ構成要素の位置である、位置付けするステップをさらに含む、段落I1に記載の方法。
前記第1のヒンジ構成要素を前記第2のヒンジ構成要素と位置合わせし、前記第1のヒンジ構成要素を前記第2のヒンジ構成要素に固定するステップをさらに含む、段落I4に記載の方法。
前記第1のレーザビームの前記第1の角度、及び前記第2のレーザビームの前記第2の角度を決定した後、且つ前記リフト機構の動作を制御して、前記エンジン構成要素と前記エンジンとの間の前記垂直距離を短縮させる方向で、前記少なくとも1つの直立支持体に沿って前記クロスビーム支持体を動かす前に、前記第1のレーザ及び前記第2のレーザを前記エンジン構成要素から離すように移動させるステップをさらに含む、段落I4に記載の方法。
前記システムコントローラは、前記第1のレーザ及び前記第2のレーザが前記エンジン構成要素から離れるように移動した後、前記基部駆動機構の動作を制御するように構成されている、段落I6に記載の方法。
ビークルの構成要素上の設置位置が、ビークルの構造体上の設置位置に位置付けされた状態で、前記構成要素を前記ビークルの前記構造体に設置する方法であって、
キャリアによって前記構成要素を支持するステップ、
前記キャリアで支持された前記構成要素を、前記ビークルの前記構造体上の前記設置位置の近傍の位置に移動させるステップ、
前記構成要素の設置位置に対する第1の要素及び第2の要素の位置において視覚システムの第1の視覚要素及び第2の視覚要素を支持するステップであって、前記第1の要素及び第2の要素の位置が、既知の視覚-要素距離離れ、前記構成要素に対して既知の配向を有する視覚-要素ラインを画定する、支持するステップ
前記視覚システムによって、前記第1の視覚要素と、前記構造体上の前記設置位置に対して既知の関係性を有する、前記構造体上のターゲット位置におけるターゲットとの間で放射エネルギーの第1のビームを方向付け、前記第2の視覚要素と前記ターゲットとの間で放射エネルギーの第2のビームを方向付けるステップ、
前記視覚システムによって、前記視覚-要素ラインに対する前記第1のビームの第1の決定された角度、及び前記視覚-要素ラインに対する前記第2のビームの第2の決定された角度を決定するステップ、並びに
前記視覚システムに連結されたコントローラによって、前記第1の角度及び前記第2の角度、並びに前記視覚-要素距離に少なくとも部分的に基づいて、少なくとも前記第1のビームの長さを判定するステップ、並びに
前記コントローラによって、前記第1のビームの長さに少なくとも部分的に基づいて、前記キャリアの動作を制御して、前記構成要素上の前記設置位置と前記構造体上の前記設置位置との間の距離を短縮させるように、前記構造体に対して前記構成要素を動かすステップ
を含む方法。
前記第1のビームの長さから、前記視覚-要素ラインに対して直角をなす第1のラインに沿った前記第1の視覚-要素と前記第3の視覚-要素との間の距離を判定することをさらに含む、段落J1に記載の方法。
前記第1のラインが、前記キャリアを支持する表面に対して平行である、段落J2に記載の方法。
前記視覚-要素ラインが、前記キャリアを支持する前記表面に対して直角をなす、段落J3に記載の方法。
前記第1のビームの長さから、前記視覚-要素ラインに対して平行な第1のラインに沿った前記第1の視覚-要素と前記第3の視覚-要素との間の距離を判定することをさらに含む、段落J1に記載の方法。
前記第1のラインが、前記キャリアを支持する表面に対して直角をなす、段落J5に記載の方法。
前記第1のビームの長さから、前記構成要素上の前記設置位置と前記構造体上の前記設置位置との間の距離を判定することをさらに含む、段落J1に記載の方法。
前記第1のビームの長さから、前記構成要素上の前記設置位置から前記構造体上の前記設置位置の決定された方向を判定することをさらに含む、段落J7に記載の方法。
前記キャリアの動きを制御して、前記構成要素を動かすことが、前記キャリアの動きを制御して、前記構成要素上の前記設置位置から前記構造体上の前記設置位置の前記決定された方向で前記構成要素を動かすことを含む、段落J8に記載の方法。
ビークルの構成要素上の設置位置が、ビークルの構造体上の設置位置に位置付けされた状態で、前記構成要素を前記ビークルの前記構造体に設置するシステムであって、
前記構成要素を支持し、支持された前記構成要素を、前記ビークルの前記構造体上の前記設置位置の近傍の位置に移動させるように構成されたキャリアアセンブリ、
視覚プロセッサ、第1の視覚要素及び第2の視覚要素、並びにフレームを含む視覚アセンブリであって、前記フレームが、既知の視覚-要素離間距離で前記第1の視覚要素と前記第2の視覚要素を支持し、前記第1の視覚要素及び前記第2の視覚要素は、前記視覚アセンブリが、前記支持された構成要素に対する既知の位置及び配向に取り付けられたときに、前記構成要素上の設置位置に対する既知の配向及び位置を有する視覚-要素ラインを画定するそれぞれの視覚-要素を有し、前記視覚プロセッサが、前記第1の視覚要素と、前記構造体上の前記設置位置に対して既知の関係性を有する、ターゲット位置における前記構造体に位置するターゲットとの間で放射エネルギーの第1のビームを方向付け、前記第2の視覚要素と前記ターゲットとの間で放射エネルギーの第2のビームを方向付け、前記視覚-要素ラインに対する前記第1のビームの第1の角度、及び前記視覚-要素ラインに対する前記第2のビームの第2の角度を検出するように構成されている、視覚アセンブリ、並びに
前記視覚システム及び前記キャリアに動作可能に連結されコントローラであって、前記第1の角度及び前記第2の角度、並びに前記視覚-要素距離に少なくとも部分的に基づいて、少なくとも前記第1のビームの長さを判定し、前記第1のビームの長さに少なくとも部分的に基づいて、前記キャリアの動作を制御して、前記構成要素上の前記設置位置と前記構造体上の前記設置位置との間の距離を短縮させるように、前記構造体に対して前記構成要素を動かすように構成された、コントローラ
を含むシステム。
本明細書に記載された移動及び位置付けシステムの種々の実施形態は、大型ビークル(例えば、民間航空機、及び具体的には、航空機発電装置構成要素)を組み立てる又は保守整備するための既存の解決策よりも幾つかの利点を提供する。
ビークル(6、96)のビークル構成要素(14、92)を前記ビークルの構造体に設置する間に、前記ビークル構成要素を前記構造体に対して動かすためのシステム(40、90)であって、
基部(42、142)の構成要素湾領域(48、148)の両側で前記基部に取り付けられた、離間された第1の支持体(44、144)及び第2の支持体(46、146)であって、前記基部から上方に延びている、第1の支持体(44、144)及び第2の支持体(46、146)、
ビーム軸(54)に沿って、前記第1の支持体と前記第2の支持体との間で延びるクロスビーム(52、152)、及び前記クロスビームに固定された一対の離間した上反りのトラスアセンブリ(56、156)であって、前記ビークル構成要素に取り付けられ、前記クロスビームに対して前記ビークル構成要素を支持するように構成されたトラスアセンブリ(56、156)を含むリフトフレーム(50、150)、
前記第1の支持体及び前記第2の支持体に対する前記クロスビームの回転のために前記クロスビームを支持するように構成された、前記第1の支持体及び前記第2の支持体上の第1のクロスビーム支持アセンブリ(58)及び第2のクロスビーム支持アセンブリ(60)であって、前記第1の支持体及び前記第2の支持体に沿って動くことが可能である、第1のクロスビーム支持アセンブリ(58)及び第2のクロスビーム支持アセンブリ(60)、
第1の制御信号に応答して、前記第1の支持体(44、144)に沿って前記第1のクロスビーム支持アセンブリ(58)を動かすように構成された第1のリフト機構(66)、
第2の制御信号に応答して、前記第1のクロスビーム支持アセンブリ(58)及び前記第2のクロスビーム支持アセンブリ(60)に対して、前記クロスビーム(52、152)を前記ビーム軸(54)の周りで回転させるように構成された回転駆動機構(68、168)、並びに
前記第1のリフト機構(66)及び回転駆動機構(68、168)に動作可能に連結された電子コントローラ(80、190)であって、前記第1の支持体(44、144)に沿って前記第1のクロスビーム支持アセンブリ(58)を動かすように前記第1のリフト機構(66)の動作を制御する前記第1の制御信号を生成し、前記第1のクロスビーム支持アセンブリ(58)に対して、前記クロスビーム(52、152)を回転させるように前記回転駆動機構(68、168)の動作を制御する前記第2の制御信号を生成し、それにより、前記ビークル(6、96)に対する前記ビークル構成要素(14、92)の位置を変更するように構成された電子コントローラ(80、190)
を備えているシステム(40、90)。
前記電子コントローラ(90、180)が、前記ビークル構成要素(14、92)の目的位置に関連付けられた入力情報を受信し、受信した前記入力情報に応答して、前記第1の支持体(44、144)に沿って前記第1のクロスビーム支持アセンブリ(58)を動かすように前記第1のリフト機構(66)の動作を制御するための前記第1の制御信号を生成し、前記クロスビーム(52、152)を前記第1のクロスビーム支持アセンブリ(58)に対して回転させ、前記ビークル構成要素(14、92)が前記リフトフレーム(50、150)によって支持されているときに、前記ビークル構成要素(14、92)を回転的に位置付けするように前記回転駆動機構(68、168)の動作を制御するための前記第2の制御信号を生成するように構成されている、条項1に記載のシステム(40、90)。
前記第1のクロスビーム支持アセンブリ(58)及び前記第2のクロスビーム支持アセンブリ(60)が、前記第1の支持体(44、144)と前記第2の支持体(46、146)との間で延びる、前記クロスビーム(52、152)を囲む管状外側支持ビーム(62)を含む、条項1に記載のシステム(40、90)。
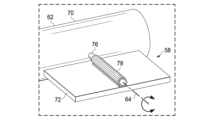
前記第1の支持体(44、144)、前記第1のクロスビーム支持アセンブリ(58)、及び前記クロスビーム(52、152)は、前記クロスビームが、前記ビーム軸(54)に対して直交する第1のピボット軸(64)の周りで枢動することを可能にするように集合的に構成されている、条項1に記載のシステム(40、90)。
前記第1のクロスビーム支持アセンブリ(58)が、前記クロスビーム(52、152)を支持する第1のクロスビーム支持要素(70)、前記第1の支持体(44、144)に沿った第1のリフトライン(74)に沿った動きのために前記第1のリフト機構(66)によって支持された第1の支持部材(72)、及び前記第1のクロスビーム支持要素を前記第1の支持部材に枢動的に連結するピボットピン(76)を含む、条項4に記載のシステム(40、90)。
前記第1のクロスビーム支持アセンブリ(58)が、前記第1のクロスビーム支持要素(79)及び前記第1の支持部材(72)のうちの片方に固定的に取り付けられたスリーブ(78)をさらに含み、前記ピボットピン(76)が、前記スリーブ内で枢動的に支持され、前記第1のクロスビーム支持要素及び前記第1の支持部材のうちの他方によって支持されている、条項5に記載のシステム(40、90)。
前記第1の支持体(46、146)、前記第1のクロスビーム支持アセンブリ(60)、及び前記クロスビーム(52、152)は、前記クロスビームが、前記第1の支持体(46、146)に対して側方に動くことを可能にするように集合的に構成されている、条項1に記載のシステム(40、90)。
第3の制御信号に応答して、前記第2の支持体(46、146)に沿って前記第2のクロスビーム支持アセンブリ(60)を動かすように構成された第2のリフト機構(82)をさらに備え、前記電子コントローラ(90)が、前記第2のリフト機構に動作可能に連結され、前記第2の支持体に沿って前記第2のクロスビーム支持アセンブリを動かすように前記第2のリフト機構の動作を制御する前記第3の制御信号を生成し、それにより、前記ビークル(6)に対する前記ビークル構成要素(14、92)の位置を変更するように構成されている、条項1に記載のシステム(40、90)。
ビークルのビークル構成要素(14、92)を前記ビークルの構造体に設置する間に、前記ビークル構成要素を前記構造体に対して動かす方法(208)であって、
リフトフレーム(50、150)を前記ビークル構成要素に取り付けるステップ(210)であって、前記リフトフレームが、クロスビーム(52、152)、及び前記クロスビームに取り付けられた一対の離間した上反りのトラスアセンブリ(56、156)を含み、前記リフトフレームを前記ビークル構成要素に取り付けることが、複数の離間された位置で前記一対のトラスアセンブリを前記ビークル構成要素に固定することを含む、取り付けるステップ(210)、
第1のクロスビーム支持アセンブリ(58)で前記クロスビームの第1の端部を支持するステップ(212)、
第1の制御信号に応答して、作業面(24)に支持された基部(42、142)に取り付けられ、前記基部(42、142)から上方に延びる第1の支持体(44、144)に沿って、前記第1のクロスビーム支持アセンブリ(58)を動かすことによって、第1のリフト機構(66)により前記ビークル構成要素を動かすステップ(214)、
前記ビークルに対して前記ビークル構成要素の配向を変更するために、第2の制御信号に応答して、前記第1のクロスビーム支持アセンブリ(58)に対して、前記リフトフレーム(50、150)及び取り付けられた前記ビークル構成要素を、ビーム軸(54)の周りで回転駆動機構(68、168)によって回転させるステップ(216)、並びに
電子コントローラによって、前記第1の支持体(44、144)に沿って前記第1のクロスビーム支持アセンブリ(58)を動かすように前記第1のリフト機構(66)の動作を制御する前記第1の制御信号、及び前記第1のクロスビーム支持アセンブリ(58)に対して、前記リフトフレーム及び前記取り付けられたビークル構成要素を回転させるように前記回転駆動機構(68、168)の動作を制御するための前記第2の制御信号を生成することによって、前記ビークルに対する前記ビークル構成要素の前記配向を変更するステップ(218)
を含む方法(208)。
前記ビークル構造体上のターゲット設置点(182)に対して、前記ビークル構成要素(14、92)の近傍に位置付けされた第1のレーザ(174)及び第2のレーザ(176)の位置合わせに関連する入力情報を、前記電子コントローラ(80、190)によって受信するステップであって、前記入力情報が、前記ビークル構造体に対する前記ビークル構成要素の目的位置及び配向を表す、受信するステップ、
受信した前記入力情報に応答して、前記第1の支持体(44、144)に沿って前記第1のクロスビーム支持アセンブリ(58)を動かすように前記第1のリフト機構(66)の動作を制御するための前記第1の制御信号を、前記電子コントローラによって生成するステップ、
前記受信した入力情報に応答して、前記第1のクロスビーム支持アセンブリに対して、前記クロスビーム(52、152)及び取り付けられた前記ビークル構成要素(14、92)を回転させるように前記回転駆動機構(68、168)の動作を制御するための前記第2の制御信号を、前記電子コントローラによって生成するステップ
をさらに含む、条項9に記載の方法(208)。
前記ビークル構成要素(14、92)の目的位置に関連付けられた入力情報を前記電子コントローラ(80、190)によって受信するステップ、
前記受信した入力情報に応答して、前記第1の支持体(44、144)に沿って前記第1のクロスビーム支持アセンブリ(58)を動かすように前記第1のリフト機構(66)の動作を制御するための前記第1の制御信号を生成するステップ、及び
前記クロスビーム(52、152)を前記第1のクロスビーム支持アセンブリ(58、164)に対して回転させ、前記ビークル構成要素が前記リフトフレームによって支持されているときに、前記ビークル構成要素を回転的に位置付けするように前記回転駆動機構(68、168)の動作を制御するための前記第2の制御信号を生成するステップ
をさらに含む、条項9に記載の方法(208)。
前記第1の支持体(44、144)に沿って前記第1のクロスビーム支持アセンブリ(58)を動かすステップが、前記ビーム軸(54)に対して直交する第1のピボット軸(64)の周りで前記クロスビーム(52)を前記第1の支持体に対して枢動させるステップを含む、条項9に記載の方法(208)。
前記クロスビーム(52、152)を前記第1の支持体(44、144)に対して枢動させるステップが、第1のクロスビーム支持要素(70)によって前記クロスビームを支持するステップ、前記第1の支持体に沿った第1のリフトライン(74)に沿った動きのために、前記第1のリフト機構によって、第1の支持部材(72)を支持するステップ、及び前記第1のクロスビーム支持要素を前記第1の支持部材に枢動的に連結するピボットピン(76)の周りで前記第1のクロスビーム支持要素(70)を枢動させるステップを含む、条項12に記載の方法(208)。
前記第1のリフトライン(74)に対して直交する側方ラインに沿って、前記第1のクロスビーム支持要素(70)を前記第1の支持部材(44、144)に対して動かすステップをさらに含む、条項13の記載の方法(208)。
前記クロスビーム(52、152)を前記第1の支持体の側方に動かすステップをさらに含む、条項9に記載の方法(208)。
前記基部(142)に取り付けられ、前記基部(142)から上方に延びる第2の支持体(46、146)に沿って動かすことが可能な第2のクロスビーム支持アセンブリ(60)で、前記クロスビーム(52、152)の第2の端部を支持するステップ、
第3の制御信号に応答して、第2のリフト機構(82)によって、前記第2の支持体に沿って前記第2のクロスビーム支持アセンブリを動かすステップ、及び
前記第2の支持体に沿って前記第2のクロスビーム支持アセンブリを動かすように前記第2のリフト機構の動作を制御する前記第3の制御信号を、前記電子コントローラ(80、190)によって生成し、それにより、前記ビークル(6、96)に対する前記ビークル構成要素(14、92)の位置を変更するステップ
をさらに含む、条項9に記載の方法(208)。
ビークル(6、96)のビークル構成要素(14、92)をビークルの構造体に設置する間に、ビークル構成要素を構造体に対して動かすためのシステム(40、90)であって、
基部(42、142)の構成要素湾領域(48、148)の両側で前記基部(42、142)に取り付けられた、離間された第1の支持体(44、144)及び第2の支持体(46、146)であって、前記基部から上方に延びている、第1の支持体(44、144)及び第2の支持体(46、146)、
前記第1の支持体と前記第2の支持体との間でクロスビームライン(54)に沿って延びるクロスビーム(52、152)、及び前記クロスビームに固定された一対の離間した上反りのトラスアセンブリ(56、156)であって、前記ビークル構成要素に取り付けられ、前記クロスビームに対して前記ビークル構成要素を支持するように構成されたトラスアセンブリ(56、156)を含むリフトフレーム(50、150)、
前記第1の支持体及び前記第2の支持体に対して前記クロスビームを支持するように構成された、前記第1の支持体及び前記第2の支持体上の第1のクロスビーム支持アセンブリ(58)及び第2のクロスビーム支持アセンブリ(60)であって、前記第1の支持体及び前記第2の支持体に沿って動くことが可能である、第1のクロスビーム支持アセンブリ(58)及び第2のクロスビーム支持アセンブリ(60)、
第1の制御信号に応答して、前記第1の支持体に沿って前記第1のクロスビーム支持アセンブリを動かすように構成された第1のリフト機構(66)、
第2の制御信号に応答して、前記第2の支持体に沿って前記第2のクロスビーム支持アセンブリを動かすように構成された第2のリフト機構(82)、並びに
前記第1のリフト機構(66)及び前記第2のリフト機構(82)に動作可能に連結された電子コントローラ(80、190)であって、前記第1の支持体(44、144)に沿って前記第1のクロスビーム支持アセンブリ(58)を動かすように前記第1のリフト機構の動作を制御する前記第1の制御信号を生成し、前記第2の支持体(46、146)に沿って前記第2のクロスビーム支持アセンブリ(60)を動かすように前記第2のリフト機構(82)の動作を制御する前記第2の制御信号を生成し、それにより、前記ビークルに対する前記ビークル構成要素の位置を変更するように構成された電子コントローラ
を備えているシステム(40、90)。
前記電子コントローラ(80、190)が、前記ビークル構成要素(14、92)の目的位置に関連付けられた入力情報を受信し、受信した前記入力情報に応答して、前記第1の支持体(44、144)に沿って前記第1のクロスビーム支持アセンブリ(58)を動かすように前記第1のリフト機構(66)の動作を制御するための前記第1の制御信号を生成し、前記第2の支持体(46、146)に沿って前記第2のクロスビーム支持アセンブリ(60)を動かすように前記第2のリフト機構(82)の動作を制御するための前記第2の制御信号を生成するように構成されている、条項17に記載のシステム(40、90)。
前記第1の支持体(44、144)、前記第1のクロスビーム支持アセンブリ(58)、及び前記クロスビーム(52、152)は、前記クロスビームが、前記ビーム軸(54)に対して直交する第1のピボット軸(64)の周りで枢動することを可能にするように集合的に構成されている、条項17に記載のシステム(40、90)。
前記第1の支持体、前記第1のクロスビーム支持アセンブリ、及び前記クロスビームは、前記クロスビームが、前記第1の支持体の側方に動くことを可能にするように集合的に構成されている、条項17に記載のシステム(40、90)。
特定された要素の序数用語(例えば、第1の、第2の、又は第3の)は、要素間を区別するために使用されており、別途明記されない限り、かような要素の必須の数又は制限された数を示すわけではなく、かような要素の特定の位置又は順番を示すわけではない。序数用語は、所定の文脈で導入された順序で関連付けられた要素に当てはめられてもよく、かような要素の序数用語は、種々の文脈で異なり得る。
Claims (16)
- ビークル(6、96)のビークル構成要素(14、92)を前記ビークルの構造体に設置する間に、前記ビークル構成要素を前記構造体に対して動かすためのシステム(40、90)であって、
基部(42、142)の構成要素湾領域(48、148)の両側で前記基部に取り付けられた、離間された第1の支持体(44、144)及び第2の支持体(46、146)であって、前記基部から上方に延びている、第1の支持体(44、144)及び第2の支持体(46、146)、
ビーム軸(54)に沿って、前記第1の支持体と前記第2の支持体との間で延びるクロスビーム(52、152)、及び前記クロスビームに固定された一対の離間した上反りのトラスアセンブリ(56、156)であって、前記ビークル構成要素に取り付けられ、前記クロスビームに対して前記ビークル構成要素を支持するように構成されたトラスアセンブリ(56、156)を含むリフトフレーム(50、150)、
前記第1の支持体及び前記第2の支持体に対する前記クロスビームの回転のために前記クロスビームを支持するように構成された、前記第1の支持体及び前記第2の支持体上の第1のクロスビーム支持アセンブリ(58)及び第2のクロスビーム支持アセンブリ(60)であって、前記第1の支持体及び前記第2の支持体に沿って動くことが可能である、第1のクロスビーム支持アセンブリ(58)及び第2のクロスビーム支持アセンブリ(60)、
第1の制御信号に応答して、前記第1の支持体(44、144)に沿って前記第1のクロスビーム支持アセンブリ(58)を動かすように構成された第1のリフト機構(66)、
第2の制御信号に応答して、前記第1のクロスビーム支持アセンブリ(58)及び前記第2のクロスビーム支持アセンブリ(60)に対して、前記クロスビーム(52、152)を前記ビーム軸(54)の周りで回転させるように構成された回転駆動機構(68、168)、並びに
前記第1のリフト機構(66)及び回転駆動機構(68、168)に動作可能に連結された電子コントローラ(80、190)であって、前記第1の支持体(44、144)に沿って前記第1のクロスビーム支持アセンブリ(58)を動かすように前記第1のリフト機構(66)の動作を制御する前記第1の制御信号を生成し、前記第1のクロスビーム支持アセンブリ(58)に対して、前記クロスビーム(52、152)を回転させるように前記回転駆動機構(68、168)の動作を制御する前記第2の制御信号を生成し、それにより、前記ビークル(6、96)に対する前記ビークル構成要素(14、92)の位置を変更するように構成された電子コントローラ(80、190)
を備えているシステム(40、90)。 - 前記電子コントローラ(90、180)が、前記ビークル構成要素(14、92)の目的位置に関連付けられた入力情報を受信し、受信した前記入力情報に応答して、前記第1の支持体(44、144)に沿って前記第1のクロスビーム支持アセンブリ(58)を動かすように前記第1のリフト機構(66)の動作を制御するための前記第1の制御信号を生成し、前記クロスビーム(52、152)を前記第1のクロスビーム支持アセンブリ(58)に対して回転させ、前記ビークル構成要素(14、92)が前記リフトフレーム(50、150)によって支持されているときに、前記ビークル構成要素(14、92)を回転的に位置付けするように前記回転駆動機構(68、168)の動作を制御するための前記第2の制御信号を生成するように構成されている、請求項1に記載のシステム(40、90)。
- 前記第1のクロスビーム支持アセンブリ(58)及び前記第2のクロスビーム支持アセンブリ(60)が、前記第1の支持体(44、144)と前記第2の支持体(46、146)との間で延びる、前記クロスビーム(52、152)を囲む管状外側支持ビーム(62)を含む、請求項1又は2に記載のシステム(40、90)。
- 前記第1の支持体(44、144)、前記第1のクロスビーム支持アセンブリ(58)、及び前記クロスビーム(52、152)は、前記クロスビームが、前記ビーム軸(54)に対して直交する第1のピボット軸(64)の周りで枢動することを可能にするように集合的に構成されている、請求項1から3のいずれか一項に記載のシステム(40、90)。
- 前記第1のクロスビーム支持アセンブリ(58)が、前記クロスビーム(52、152)を支持する第1のクロスビーム支持要素(70)、前記第1の支持体(44、144)に沿った第1のリフトライン(74)に沿った動きのために前記第1のリフト機構(66)によって支持された第1の支持部材(72)、及び前記第1のクロスビーム支持要素を前記第1の支持部材に枢動的に連結するピボットピン(76)を含む、請求項4に記載のシステム(40、90)。
- 前記第1のクロスビーム支持アセンブリ(58)が、前記第1のクロスビーム支持要素(70)及び前記第1の支持部材(72)のうちの片方に固定的に取り付けられたスリーブ(78)をさらに含み、前記ピボットピン(76)が、前記スリーブ内で枢動的に支持され、前記第1のクロスビーム支持要素及び前記第1の支持部材のうちの他方によって支持されている、請求項5に記載のシステム(40、90)。
- 前記第1の支持体(44、144)、前記第1のクロスビーム支持アセンブリ(60)、及び前記クロスビーム(52、152)は、前記クロスビームが、前記第1の支持体(44、144)に対して側方に動くことを可能にするように集合的に構成されている、請求項1から6のいずれか一項に記載のシステム(40、90)。
- 第3の制御信号に応答して、前記第2の支持体(46、146)に沿って前記第2のクロスビーム支持アセンブリ(60)を動かすように構成された第2のリフト機構(82)をさらに備え、前記電子コントローラ(90)が、前記第2のリフト機構に動作可能に連結され、前記第2の支持体に沿って前記第2のクロスビーム支持アセンブリを動かすように前記第2のリフト機構の動作を制御する前記第3の制御信号を生成し、それにより、前記ビークル(6)に対する前記ビークル構成要素(14、92)の位置を変更するように構成されている、請求項1から7のいずれか一項に記載のシステム(40、90)。
- 前記基部(42、142)が、移動可能であり、複数のホイールを備えている、請求項1から8のいずれか一項に記載のシステム(40、90)。
- ビークルのビークル構成要素(14、92)を前記ビークルの構造体に設置する間に、前記ビークル構成要素を前記構造体に対して動かす方法(208)であって、
リフトフレーム(50、150)を前記ビークル構成要素に取り付けるステップ(210)であって、前記リフトフレームが、クロスビーム(52、152)、及び前記クロスビームに取り付けられた一対の離間した上反りのトラスアセンブリ(56、156)を含み、前記リフトフレームを前記ビークル構成要素に取り付けることが、複数の離間された位置で一対の前記トラスアセンブリを前記ビークル構成要素に固定することを含む、取り付けるステップ(210)、
第1のクロスビーム支持アセンブリ(58)で前記クロスビームの第1の端部を支持するステップ(212)、
第1の制御信号に応答して、作業面(24)に支持された基部(42、142)に取り付けられ、前記基部(42、142)から上方に延びる第1の支持体(44、144)に沿って、前記第1のクロスビーム支持アセンブリ(58)を動かすことによって、第1のリフト機構(66)により前記ビークル構成要素を動かすステップ(214)、
前記ビークルに対して前記ビークル構成要素の配向を変更するために、第2の制御信号に応答して、前記第1のクロスビーム支持アセンブリ(58)に対して、前記リフトフレーム(50、150)及び取り付けられた前記ビークル構成要素を、ビーム軸(54)の周りで回転駆動機構(68、168)によって回転させるステップ(216)、並びに
電子コントローラによって、前記第1の支持体(44、144)に沿って前記第1のクロスビーム支持アセンブリ(58)を動かすように前記第1のリフト機構(66)の動作を制御する前記第1の制御信号、及び前記第1のクロスビーム支持アセンブリ(58)に対して、前記リフトフレーム及び前記取り付けられたビークル構成要素を回転させるように前記回転駆動機構(68、168)の動作を制御するための前記第2の制御信号を生成することによって、前記ビークルに対する前記ビークル構成要素の前記配向を変更するステップ(218)
を含む方法(208)。 - 前記ビークル構造体上のターゲット設置点(182)に対する、前記ビークル構成要素(14、92)の近傍に位置付けされた第1のレーザ(174)及び第2のレーザ(176)の位置合わせに関連する入力情報を、前記電子コントローラ(80、190)によって受信するステップであって、前記入力情報が、前記ビークル構造体に対する前記ビークル構成要素の目的位置及び配向を表す、受信するステップ、
受信した前記入力情報に応答して、前記第1の支持体(44、144)に沿って前記第1のクロスビーム支持アセンブリ(58)を動かすように前記第1のリフト機構(66)の動作を制御するための前記第1の制御信号を、前記電子コントローラによって生成するステップ、
前記受信した入力情報に応答して、前記第1のクロスビーム支持アセンブリに対して、前記クロスビーム(52、152)及び取り付けられた前記ビークル構成要素(14、92)を回転させるように前記回転駆動機構(68、168)の動作を制御するための前記第2の制御信号を、前記電子コントローラによって生成するステップ
をさらに含む、請求項10に記載の方法(208)。 - 前記ビークル構成要素(14、92)の目的位置に関連付けられた入力情報を前記電子コントローラ(80、190)によって受信するステップ、
受信した前記入力情報に応答して、前記第1の支持体(44、144)に沿って前記第1のクロスビーム支持アセンブリ(58)を動かすように前記第1のリフト機構(66)の動作を制御するための前記第1の制御信号を生成するステップ、及び
前記クロスビーム(52、152)を前記第1のクロスビーム支持アセンブリ(58、164)に対して回転させ、前記ビークル構成要素が前記リフトフレームによって支持されているときに、前記ビークル構成要素を回転的に位置付けするように前記回転駆動機構(68、168)の動作を制御するための前記第2の制御信号を生成するステップ
をさらに含む、請求項10又は11に記載の方法(208)。 - 前記第1の支持体(44、144)に沿って前記第1のクロスビーム支持アセンブリ(58)を動かすステップが、前記ビーム軸(54)に対して直交する第1のピボット軸(64)の周りで前記クロスビーム(52)を前記第1の支持体に対して枢動させるステップを含む、請求項10から12のいずれか一項に記載の方法(208)。
- 前記クロスビーム(52、152)を前記第1の支持体(44、144)に対して枢動させるステップが、第1のクロスビーム支持要素(70)によって前記クロスビームを支持するステップ、前記第1の支持体に沿った第1のリフトライン(74)に沿った動きのために、前記第1のリフト機構によって、第1の支持部材(72)を支持するステップ、及び前記第1のクロスビーム支持要素を前記第1の支持部材に枢動的に連結するピボットピン(76)の周りで前記第1のクロスビーム支持要素(70)を枢動させるステップを含む、請求項13に記載の方法(208)。
- 前記第1のリフトライン(74)に対して直交する側方ラインに沿って、前記第1のクロスビーム支持要素(70)を前記第1の支持部材(44、144)に対して動かすステップをさらに含む、請求項14に記載の方法(208)。
- 前記基部(142)に取り付けられ、前記基部(142)から上方に延びる第2の支持体(46、146)に沿って動かすことが可能な第2のクロスビーム支持アセンブリ(60)で、前記クロスビーム(52、152)の第2の端部を支持するステップ、
第3の制御信号に応答して、第2のリフト機構(82)によって、前記第2の支持体に沿って前記第2のクロスビーム支持アセンブリを動かすステップ、及び
前記第2の支持体に沿って前記第2のクロスビーム支持アセンブリを動かすように前記第2のリフト機構の動作を制御する前記第3の制御信号を、前記電子コントローラ(80、190)によって生成し、それにより、前記ビークル(6、96)に対する前記ビークル構成要素(14、92)の位置を変更するステップ
をさらに含む、請求項10から15のいずれか一項に記載の方法(208)。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US16/382,144 US11634239B2 (en) | 2019-04-11 | 2019-04-11 | Systems and methods for moving a vehicle component relative to the vehicle structure |
| US16/382,144 | 2019-04-11 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020192673A JP2020192673A (ja) | 2020-12-03 |
| JP7534860B2 true JP7534860B2 (ja) | 2024-08-15 |
Family
ID=69844567
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020062104A Active JP7534860B2 (ja) | 2019-04-11 | 2020-03-31 | ビークル構成要素をビークル構造体に対して動かすためのシステム及び方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US11634239B2 (ja) |
| EP (1) | EP3744643B1 (ja) |
| JP (1) | JP7534860B2 (ja) |
| CN (1) | CN111807271B (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TR202005987A1 (tr) * | 2020-04-15 | 2021-10-21 | Tuerk Hava Yollari Teknik Anonim Sirketi | Hareketli̇ fan biçaği tutucularina sahi̇p bi̇r taşiyici |
| US11849552B2 (en) * | 2021-05-06 | 2023-12-19 | Manufacturing Design Solutions | Adjustable free-standing support for a data display monitor |
| CN113800376A (zh) * | 2021-09-30 | 2021-12-17 | 海航航空技术有限公司 | 一种飞机发动机更换方法和手扳葫芦 |
| US12403706B2 (en) | 2022-09-30 | 2025-09-02 | The Boeing Company | Robotics for inkjet printing vehicle livery |
| US12403495B2 (en) * | 2022-09-30 | 2025-09-02 | The Boeing Company | Inkjet printing vehicle livery |
| US12479601B2 (en) * | 2024-05-17 | 2025-11-25 | United States Of America As Represented By The Secretary Of The Air Force | Stand for holding a workpiece with three-axis adjustability |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000192673A (ja) | 1998-12-24 | 2000-07-11 | Nikken Birukon:Kk | 建築物外装改装方法および建築物外装改装用の下地取出構造 |
| JP2004142874A (ja) | 2002-10-24 | 2004-05-20 | Oji Logistics Co Ltd | 荷役車輌のクランプ装置 |
| JP2012210989A (ja) | 2011-03-31 | 2012-11-01 | Toyota Industries Corp | 把持装置 |
| US20180311808A1 (en) | 2015-10-29 | 2018-11-01 | Safran Aircraft Engines | Engine assembly stand |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3433459A (en) | 1967-05-02 | 1969-03-18 | Federal Sign And Signal Corp | Load handling apparatus |
| JPH0524720Y2 (ja) * | 1985-07-30 | 1993-06-23 | ||
| US5188247A (en) | 1991-11-04 | 1993-02-23 | Keith Jastrow | Lifting apparatus |
| GB0022444D0 (en) | 2000-09-13 | 2000-11-01 | Bae Systems Plc | Positioning system and method |
| US6546616B2 (en) | 2000-12-15 | 2003-04-15 | Bell Helicopter Textron Inc. | Six-axis alignment and installation tool |
| AUPS074602A0 (en) * | 2002-02-25 | 2002-03-21 | Protean Global Pty Ltd | Lifting mechanism for use with health care equipment |
| RU2355579C2 (ru) * | 2003-11-25 | 2009-05-20 | Гюдель Гроуп Аг | Конвейер для транспортировки заготовок в прессе |
| US20070210289A1 (en) * | 2006-01-31 | 2007-09-13 | Frank Drake | Powered drive for jack |
| US7587258B2 (en) | 2006-05-10 | 2009-09-08 | The Boeing Company | Merged laser and photogrammetry measurement using precise camera placement |
| US7756321B2 (en) | 2007-02-28 | 2010-07-13 | The Boeing Company | Method for fitting part assemblies |
| CA2729021A1 (en) | 2008-07-03 | 2010-01-07 | Rotary Lift, A Division Of Dover Industrial Products, Inc. | Vehicle guidance system for automotive lifts |
| US20100213429A1 (en) * | 2009-02-20 | 2010-08-26 | Frank Drake | Jack assembly with multiple degrees of freedom |
| US8634950B2 (en) | 2009-12-14 | 2014-01-21 | Embraer S.A. | Automated positioning and alignment method and system for aircraft structures using robots |
| US20120110816A1 (en) * | 2010-11-08 | 2012-05-10 | The Boeing Company | Engine Loading System |
| FR3021954B1 (fr) * | 2014-06-06 | 2016-05-27 | Aircelle Sa | Ensemble de manutention d'un moteur d'aeronef |
| FR3042175B1 (fr) | 2015-10-13 | 2020-01-03 | Safran Nacelles | Outillage pour la manutention d'une nacelle de turboreacteur d'aeronef |
| FR3050675A1 (fr) * | 2016-05-02 | 2017-11-03 | Supratec | Manipulateur de pieces |
| JP6748919B2 (ja) | 2017-01-13 | 2020-09-02 | 清水建設株式会社 | 水平搬送台車 |
| FR3068336B1 (fr) * | 2017-06-29 | 2021-07-23 | Safran Nacelles | Ensemble de manutention d’un turboreacteur d’aeronef |
-
2019
- 2019-04-11 US US16/382,144 patent/US11634239B2/en active Active
-
2020
- 2020-03-09 CN CN202010155833.0A patent/CN111807271B/zh active Active
- 2020-03-13 EP EP20163118.1A patent/EP3744643B1/en active Active
- 2020-03-31 JP JP2020062104A patent/JP7534860B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000192673A (ja) | 1998-12-24 | 2000-07-11 | Nikken Birukon:Kk | 建築物外装改装方法および建築物外装改装用の下地取出構造 |
| JP2004142874A (ja) | 2002-10-24 | 2004-05-20 | Oji Logistics Co Ltd | 荷役車輌のクランプ装置 |
| JP2012210989A (ja) | 2011-03-31 | 2012-11-01 | Toyota Industries Corp | 把持装置 |
| US20180311808A1 (en) | 2015-10-29 | 2018-11-01 | Safran Aircraft Engines | Engine assembly stand |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2020192673A (ja) | 2020-12-03 |
| US11634239B2 (en) | 2023-04-25 |
| EP3744643B1 (en) | 2022-01-05 |
| EP3744643A1 (en) | 2020-12-02 |
| CN111807271A (zh) | 2020-10-23 |
| US20200324915A1 (en) | 2020-10-15 |
| CN111807271B (zh) | 2024-08-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7534860B2 (ja) | ビークル構成要素をビークル構造体に対して動かすためのシステム及び方法 | |
| JP7591353B2 (ja) | 航空機エンジン構成要素を位置決めするためのシステム及び方法 | |
| US20250145421A1 (en) | Operation assistance module, image generation application, and work machine | |
| Izard et al. | Large-scale 3D printing with cable-driven parallel robots | |
| KR102103808B1 (ko) | 크래들 픽스처를 위한 조정 가능한 리테이닝 구조체 | |
| US9944499B2 (en) | Crane maneuvering assistance | |
| CN104118580B (zh) | 一种低重力模拟装置及方法 | |
| CN110337520A (zh) | 具有自动桅杆设置的大型机械手 | |
| US10295970B2 (en) | Method for attachment of a pre-assembled powerplant and pylon assembly to an aircraft | |
| CN110545962A (zh) | 线缆驱动式并联操纵器 | |
| US12299862B2 (en) | Performance information server, client terminal, work machine, and method for acquiring a request including model information and presenting performance information including deformation image of the work machine based on the model information | |
| CN104950909A (zh) | 多节机械臂的控制系统及方法 | |
| US20220097233A1 (en) | Aligning two robot arms relative to one another | |
| BR112019008129B1 (pt) | Método para atualizar um guindaste articulado e guindaste de compensação por elevação | |
| CN107825092A (zh) | 一种翻转装配装置 | |
| CN108397217A (zh) | 可实现监测元件预布设的隧道钢拱架运输安装机与方法 | |
| JP2017020252A (ja) | 橋梁点検装置 | |
| CN105204153A (zh) | 大型天文望远镜拼接镜面子镜的装卸方法 | |
| CN107571245B (zh) | 一种数控6自由度并联机构小型吊运机 | |
| CN105152035B (zh) | 基于悬臂式的光学晶体组件的拆装方法 | |
| JP2022056091A (ja) | 情報取得システム | |
| CN105196274A (zh) | 大型天文望远镜拼接镜面子镜的装卸装置 | |
| US20240351680A1 (en) | Systems and methods for controlling weight distribution of a remotely piloted aircraft | |
| Wang et al. | Dynamics of telescopic boom crane with pulley-rope system based on movable nodes | |
| Hamaza | Aerial Manipulators for Contact-based Interaction |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230323 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240227 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20240228 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240527 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240709 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240802 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7534860 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |