以下、本発明の実施の形態を図面に基づいて説明する。
まず、本実施形態の農業機械1について説明する。図20は、農業機械1の側面図である。農業機械1は、トラクタから構成されている。なお、農業機械1は、トラクタに限定せず、例えば田植機又はコンバインなどの他の農業機械、或いは農作業を行うトラクタ以外の作業車両などにより構成されてもよい。
農業機械1は、走行車体3、原動機4、変速装置5、及び走行装置7を備えている。走行装置7は、前輪7F及び後輪7Rを有している。前輪7Fは、タイヤ型であってもよいし、クローラ型であってもよい。また、後輪7Rも、タイヤ型であってもよいし、クローラ型であってもよい。原動機4は、ディーゼルエンジン或いは電動モータなどから構成されている。本実施形態では、原動機4はディーゼルエンジンにより構成されている。変速装置5は、変速によって走行装置7の推進力を切り替え可能であると共に、走行装置7の前進と後進を切り替え可能である。原動機4の駆動力が変速装置5により走行装置7に伝達されて、走行装置7が駆動することで、走行車体3が前後に走行する。なお、図20において、左側が走行車体3の前方であり、右側が走行車体3の後方である。
走行車体3にはキャビン9が設けられている。キャビン9の内部には、運転席10が設けられている。走行車体3の後部には、3点リンク機構などで構成された昇降装置8が設けられている。昇降装置8には、農作業を行うための作業装置2を連結可能な連結部8g、8hが設けられている。作業装置2を連結部8g、8hに連結することで、作業装置2と走行車体3(農業機械1)とが連結されて、走行車体3が作業装置2を牽引可能になる。
作業装置2は圃場に対して対地作業を行う。例えば作業装置2には、圃場に対して耕うん作業を行う耕うん装置(ロータリ耕うん機)、粗耕起を行う粗耕起装置(スタブルカルチ)、及び代掻きを行う代掻き装置(ドライブハロー)、肥料若しくは農薬などを散布する散布装置、種まきを行う播種装置、苗を移植する移植装置、及び収穫を行う収穫装置などが含まれている。
次に、本実施形態の農作業支援システム100について説明する。図1は、農作業支援
システム100の構成図である。農作業支援システム100は農作業支援装置50を含んでいる。農作業支援システム100及び農作業支援装置50は、圃場で農業機械1を走行させながら作業装置2により農作業を行うことを支援する。
農業機械1は、制御装置60、操作装置62、原動機4、変速装置5、制動装置6、操舵装置29、昇降装置8、測位装置40、警報装置63、及び検出装置64を備えている。また、農業機械1には、LAN又はCANなどの車載ネットワークN1が構築されている。制御装置60、操作装置62、測位装置40、警報装置63、及び検出装置64は、車載ネットワークN1に接続されている。農業機械1に備わるこれらの各部は、農作業支援システム100に含まれる。
制御装置60は、CPU(又はマイクロコンピュータ)とメモリとを含んだ電気回路などから構成されている。制御装置60のメモリには、揮発性メモリと不揮発性メモリとが含まれている。制御装置60は、農業機械1の各部の動作を制御する。制御装置60には、農業機械1の走行と作業装置2の動作を制御する自動制御部61が設けられている。操作装置62は、運転席10に着座した運転者又は農業機械1の近傍にいる作業者などのユーザが操作可能なスイッチ、レバー、ペダル、及びその他のキーなどから構成されている。操作装置62には、モードスイッチ65が含まれている。モードスイッチ65は、農業機械1のモードを切り替えるために操作される。
原動機4(エンジン)は、制御装置60により駆動、停止、及び回転数を制御される。変速装置5は制御弁37に接続されている。制御弁37は、制御装置60から送信される制御信号に基づいて作動する電磁弁である。制御弁37には、油圧ポンプ33から吐出された作動油が供給される。制御弁37は、図1では1つのブロックで示しているが、変速装置5に設けられた油圧クラッチ又は油圧シリンダなどの油圧機器の数に応じて適宜数設けられている。
自動制御部61は、制御弁37の切り替え位置及び開度を電気的に制御することにより、変速装置5の駆動を制御する。変速装置5が原動機4の駆動力を走行装置7に伝達することで、走行装置7が作動して、走行車体3を前後に走行させる。また、例えば作業装置2が対地作業装置である場合などには、変速装置5は原動機4の駆動力を作業装置2に伝達する。これにより、作業装置2の作動力が大きくなる。
また、自動制御部61は、車載ネットワークN1を経由して作業装置2と通信する。具体的には、作業装置2は、制御部2aと通信部2bとを備えている。自動制御部61は、車載ネットワークN1を経由して作業装置2に作業指令を送信する。作業装置2の制御部2aは、当該作業指令を通信部2bにより受信すると、当該作業指令に基づいて作業装置2の各部の動作を制御して、農作業(対地作業)を行う。また、制御部2aは、作業状態などを示す情報又はデータを通信部2bにより車載ネットワークN1を経由して制御装置60に送信する。自動制御部61は、作業装置2から車載ネットワークN1を経由して受信した情報又はデータに基づいて、作業装置2の作業状態などを検出する。
制動装置6は制御弁38に接続されている。制御弁38は、制御装置60から送信される制御信号に基づいて作動する電磁弁である。制御弁38には、油圧ポンプ33から吐出された作動油が供給される。自動制御部61は、制御弁38の切り替え位置及び開度を電気的に制御することにより、制動装置6を作動させて、走行車体3にブレーキをかける。
操舵装置29は、ハンドル(ステアリングホイール)30と操舵軸(回転軸)31と補助機構(パワーステアリング機構)32とを有している。ハンドル30は、キャビン9の内部に設けられている。操舵軸31は、ハンドル30の回転に伴って回転する。補助機構
32は、ハンドル30による操舵を補助する。
補助機構32には、制御弁34とステアリングシリンダ35とが含まれている。制御弁34は、制御装置60から送信される制御信号に基づいて作動する電磁弁である。詳しくは、制御弁34は、スプールなどの移動によって切り替え可能な3位置切替弁から構成されている。制御弁34には、油圧ポンプ33から吐出された作動油が供給される。制御装置60は、制御弁34の切り替え位置及び開度を電気的に制御することにより、ステアリングシリンダ35に供給する油圧を調整して、ステアリングシリンダ35を伸縮させる。ステアリングシリンダ35は、前輪7Fの向きを変えるナックルアーム(図示省略)に接続されている。
制御弁34は、操舵軸31の操舵によっても切り替え可能である。具体的には、ハンドル30を操作することで、当該操作状態に応じて操舵軸31が回転して、制御弁34の切り替え位置及び開度が切り替わる。ステアリングシリンダ35は、制御弁34の切り替え位置及び開度に応じて、走行車体3の左方又は右方に伸縮する。このステアリングシリンダ35の伸縮動作により、前輪7Fの操舵方向が変更される。なお、上述した操舵装置29は一例であり、上述した構成に限定されない。
農業機械1の走行車体3は、ハンドル30の手動操作による手動操舵と、自動制御部61による自動操舵とが可能である。また、操作装置62に備わるアクセル部材又はブレーキ部材(共に図示省略)の手動操作に応じて、変速装置5又は制動装置6が駆動することで、走行車体3は走行及び停止が可能である。さらに、自動制御部61による変速装置5と制動装置6の制御に応じて、走行車体3は、自動で走行及び停止が可能である。
図2は、昇降装置8の斜視図である。昇降装置8は、リフトアーム8a、ロアリンク8b、トップリンク8c、リフトロッド8d、リフトシリンダ8eを有している。リフトアーム8aの前端部は、変速装置5を収容するケース(ミッションケース)の後上部に上方又は下方に揺動可能に支持されている。リフトアーム8aは、リフトシリンダ8eの駆動によって揺動(昇降)する。リフトシリンダ8eは、油圧シリンダから構成されている。リフトシリンダ8eは、制御弁36(図1)と接続されている。制御弁36は、制御装置60から送信される制御信号に基づいて作動する電磁弁である。制御弁36には、油圧ポンプ33から吐出された作動油が供給される。
図2に示すロアリンク8bの前端部は、変速装置5(図1、図20)の後下部に上方又は下方に揺動可能に支持されている。トップリンク8cの前端部は、ロアリンク8bよりも上方において、変速装置5の後部に上方又は下方に揺動可能に支持されている。リフトロッド8dは、リフトアーム8aとロアリンク8bとを連結している。ロアリンク8b及びトップリンク8cの後端部には、作業装置2を連結可能な連結部8g、8hが設けられている。
図1に示す自動制御部61は、制御弁36の切り替え位置及び開度を電気的に制御することにより、図2に示すリフトシリンダ8eに供給する油圧を調整して、リフトシリンダ8eを伸縮させる。リフトシリンダ8eの伸縮動作により、リフトアーム8aが昇降するとともに、リフトロッド8dを介してリフトアーム8aと連結されたロアリンク8bが昇降する。これにより、作業装置2がロアリンク8bの前部(連結部8g、8hと反対側)を支点として、上方又は下方に揺動(昇降)する。
図1に示す測位装置40は、受信装置41と慣性計測装置(IMU:Inertial Measurement Unit)42とを有している。受信装置41は、D-GPS、GPS、GLONASS、北斗、ガリレオ、みちびきなどの衛星測位システム(測位衛星)から送信された衛星信号(測位衛星の位置、送信時刻、補正情報など)を受信する。測位装置40は、受信装置41により受信した衛星信号に基づいて、現在位置(例えば、緯度、経度)を検出する。即ち、測位装置40は、農業機械1の走行車体3の位置を検出する位置検出部である。慣性計測装置42は、加速度センサとジャイロセンサなどを有している。慣性計測装置42は、走行車体3のロール角、ピッチ角、ヨー角などを検出する。
警報装置63は、走行車体3に設けられたブザー、スピーカ、又は警告灯などから構成されている。警報装置63は、音又は光により走行車体3の周囲に対して警報を発する。検出装置64は、農業機械1及び作業装置2の各部に設置されたセンサなど(カメラが含まれていてもよい。)から構成されている。検出装置64は、センサなどからの出力信号に基づいて、農業機械1の変速装置5、制動装置6、走行装置7、昇降装置8、操舵装置29、及び操作装置62といった各部の動作状態(駆動及び停止の状態と、動作位置など)を検出する。また、検出装置64は、センサなどからの出力信号に基づいて、作業装置2の動作状態を検出する。
農作業支援装置50は、例えば携帯型のタブレット端末装置などから構成されている。農作業支援装置50は、例えば農業機械1のキャビン9の内部に搭載され、農業機械1に対して着脱可能である。即ち、農業機械1は農作業支援装置50を備えている。
農作業支援装置50には、制御部51、表示操作部52、記憶部53、及び通信部54が備わっている。制御部51は、CPU(又はマイクロコンピュータ)と揮発性メモリと不揮発性メモリとから構成されている。制御部51は、農作業支援装置50の各部を制御する。制御部51には、圃場登録部51a、エリア設定部51b、ルート作成部51c、状況検出部51d、記録部51e、及び通知部51gが設けられている。これら各部は、本例ではソフトウェアプログラムで構成されているが、他の例としてASICなどの半導体素子又は電気回路のようなハードウェアで構成されていてもよい。
表示操作部52は、タッチパネルから構成されていて、各種の情報を画面に表示する。また、表示操作部52の表示画面に対して所定の操作を行うことにより、各種の入力を行うことができる。表示操作部52は、表示部であり且つ入力部である。表示操作部52に代えて、独立した表示部と操作部(入力部)とを農作業支援装置50に設けてもよい。
記憶部53は、不揮発性メモリなどから構成されている。記憶部53には、農業機械1の走行と作業を支援する情報又はデータが読み書き可能に記憶される。通信部54は、車載ネットワークN1に接続するためのインタフェイスから構成されている。制御部51は、通信部54により車載ネットワークN1を経由して、制御装置60、操作装置62、測位装置40、警報装置63、検出装置64、及び作業装置2と通信する。通信部54は、農業機械1の制御装置60に情報及びデータを出力する出力部である。
圃場登録部51aは、農業機械1と作業装置2により農作業を行う圃場に関する情報を登録する。エリア設定部51bは、圃場登録部51aにより登録された圃場に所定のエリアを設定する。ルート作成部51cは、圃場登録部51aにより登録された圃場に、農業機械1が走行する走行ルートを作成する。
状況検出部51dは、農業機械1が走行ルートに基づいて走行して、作業装置2により行われた農作業の状況を検出する。詳しくは、状況検出部51dは、測位装置40により検出された農業機械1の位置と、検出装置64により検出された農業機械1及び作業装置2の動作状態とに基づいて、農業機械1及び作業装置2により行われた農作業の実施状況を検出する。或いは、状況検出部51dは、制御装置60又は作業装置2の制御部2aが各部を制御した結果を示すデータログを制御装置60又は制御部2aから受信して、当該
データログに基づいて農業機械1及び作業装置2により行われた農作業の実施状況を検出する。状況検出部51dは、検出した農作業の実施状況と、検出装置64により検出された農業機械1及び作業装置2の動作状態とを含む検出結果を出力する。
記録部51eは、表示操作部52による入力情報、状況検出部51dの検出結果、作業装置2の識別情報、及びその他の情報とデータなどを受け付けて、記憶部53に記憶させることにより記録する。通知部51gは、所定の情報とデータの内容を表示操作部52に表示させることにより通知する。また、通知部51gは、所定の情報とデータの内容を示す音声を、警報装置63のスピーカから出力することにより通知してもよい。
次に、農作業支援システム100の各部の動作について説明する。農作業支援装置50が起動すると、制御部51は、図3に示すホーム画面D1を表示操作部52に表示させる。このホーム画面D1のデータと、後述する各画面のデータとは、記憶部53に記憶されている。制御部51は、必要に応じて記憶部53から画面データを読み出して、当該画面データに基づく画面を表示操作部52に表示させる。
ホーム画面D1には、農業機械マークX1、圃場キーB1、自動運転キーB2a、オートステアキーB2b、履歴キーB3、及び設定キーB0が表示されている。設定キーB0は、各種の設定を行うためのキーである。設定キーB0を選択(タップ操作)することで、所定の項目の設定及び登録が可能となる。当該所定の項目には、例えば農作業支援装置50が搭載される農業機械1、当該農業機械1に連結される作業装置2、農業機械1と作業装置2により行う農作業、当該農作業を実施する圃場、及び表示操作部52に関する事項が含まれている。
履歴キーB3は、農業機械1の作業履歴を表示させるためのキーである。圃場キーB1は、農業機械1により農作業を行う圃場を登録するためのキーである。自動運転キーB2aは、農業機械1の自動走行作業モードに関する設定又は予測を行うためのキーである。オートステアキーB2bは、農業機械1の自動操舵作業モードに関する設定又は予測を行うためのキーである。
自動走行作業モードとは、農業機械1の走行車体3を自動運転で走行させながら、作業装置2により農作業(対地作業)を行うモードのことである。農業機械1の自動運転とは、走行車体3の走行速度を自動で変更し、且つ走行車体3の操舵を自動で行うことである。自動操舵作業モードとは、走行車体3の操舵を自動で行いながら、作業装置2により農作業(対地作業)を行うモードのことである。農業機械1が自動操舵作業モードにあるときは、農業機械1の運転者が操作装置62(図1)に含まれるアクセル部材又はブレーキ部材を操作することで、当該操作に応じて走行車体3の走行速度が変更される。即ち、自動操舵作業モードでは、走行車体3の走行速度が手動操作に基づいて変更される。
また、農業機械1は、手動運転によっても走行可能であり、且つ当該走行時に作業装置2により対地作業を行うことが可能である。農業機械1の手動運転とは、運転者が操作装置62のアクセル部材又はブレーキ部材を操作することにより、走行車体3の走行速度を変更し、且つハンドル30(図1)を操作することにより、走行車体3の操舵を行うことである。
図3に示すホーム画面D1において、ユーザが圃場キーB1を選択することで、図示しない圃場登録画面が表示操作部52に表示される。当該圃場登録画面において、ユーザが所定の操作を行うことで、圃場の位置と輪郭と識別情報などの圃場情報を入力することができる。制御部51は、圃場登録画面で入力された圃場情報を記憶部53の所定の領域に記憶させることにより、当該圃場情報を登録する。圃場情報の登録が終了した後、ユーザ
がホーム画面D1の自動運転キーB2aを選択すると、制御部51は、図4に示す作業選択画面D3を表示操作部52に表示させる。
作業選択画面D3には、入力操作手順を示すメッセージが表示されている。また、作業選択画面D3には、複数の作業キーB31~B35、上矢印キーB41、下矢印キーB42、次へキーB9、及び戻るキーB8が表示されている。作業キーB31~B35は、農業機械1と当該農業機械1に連結された作業装置2とで行うことが可能な農作業を示したキーである。図4では、5つの作業キーB31、B32、B33、B34、B35を表示しているが、農業機械1及び作業装置2で実行可能な農作業が6つ以上ある場合は、ユーザが上矢印キーB41又は下矢印キーB42を選択することで、制御部51が他の作業を示す作業キーを作業選択画面D3に表示させる。
ユーザが作業キーB31~B35のいずれかを選択すると、制御部51は、選択された作業キーを他の作業キーとは異なる表示形態で作業選択画面D3に表示させる。図4の例では、選択された耕うん作業キーB31だけに、黒丸印が付されている。作業キーB31、B32、B33、B34のいずれかが選択された状態で、ユーザが次へキーB9を選択すると、制御部51は、図5Aに示す車両確認画面D4aを表示操作部52に表示させる。即ち、次へキーB9は、表示操作部52の表示画面を次の画面に切り替えるためのキーである。なお、ユーザが戻るキーB8を選択すると、制御部51は、図3のホーム画面D1を表示操作部52に表示させる。即ち、戻るキーB8は、表示操作部52の表示画面を前の画面に戻すためのキーである。
図5Aに示す車両確認画面D4aには、入力操作手順を示すメッセージ、農作業の種別、農業機械1のタイプ、無人機設定キーB10、有人機設定キーB11、次へキーB9、及び戻るキーB8が表示されている。農作業の種別には、作業選択画面D3で選択された農作業が示されている。農業機械1のタイプには、車両タイプと制御タイプとが含まれている。図5Aでは、予め登録(設定)された農業機械1のタイプが車両確認画面D4aに表示されている。
なお、ユーザは、例えばホーム画面D1(図3)の設定キーB0を選択して、表示操作部52に対して所定の入力操作を行うことで、農業機械1のタイプを入力することができる。またその際、ユーザは所定の入力操作を行うことで、農業機械1の名称と寸法などの仕様も入力することができる。さらにユーザが所定の入力操作を行うことで、制御部51が、入力された農業機械1のタイプと仕様を記憶部53の所定の領域に記憶させることにより、当該タイプと仕様を登録する。後述する農業機械1の情報と作業装置2の情報も、ホーム画面D1から同様の手順で入力して、記憶部53に登録(記憶)することができる。
ユーザは、車両確認画面D4aの無人機設定キーB10又は有人機設定キーB11を選択して、所定の入力操作を行うことで、農業機械1のタイプを変更することができる。ユーザが、車両確認画面D4aの次へキーB8を選択すると、制御部51は、車両確認画面D4aに表示されていた設定情報(農作業の種別と農業機械1のタイプ)を内部メモリに記憶させ、図5Bに示す装置選択画面D4bを表示操作部52に表示させる。
装置選択画面D4bには、入力操作手順を示すメッセージ、作業装置キーB36a~B36d、上矢印キーB41、下矢印キーB42、次へキーB9、及び戻るキーB8が表示されている。各作業装置キーB36a~B36dには、予め登録された作業装置2の代表的な固有情報が示されている。作業装置2の代表的な固有情報には、作業装置2の名称、作業装置2による前回作業の有無、及び作業幅が含まれている。作業幅は、作業装置2の進行方向に対して垂直な水平面内の作業可能な幅のことである。図5Bでは、4つの作業
装置キーB36a~B36dを表示しているが、農作業支援装置50に登録された作業装置2が5つ以上ある場合は、ユーザが上矢印キーB41又は下矢印キーB42を選択することで、制御部51が他の作業装置2を示す作業装置キーを装置選択画面D4bに表示させる。
ユーザが作業装置キーB36a~B36dのいずれかを選択すると、制御部51は、選択された作業装置キーを他の作業装置キーとは異なる表示形態で装置選択画面D4bに表示させる。図5Bの例では、選択された作業装置キーB36aだけに、黒丸印が付されている。作業装置キーB36a~B36dのいずれかが選択された状態で、ユーザが次へキーB9を選択すると、制御部51は、図5Cに示す装置確認画面D4cを表示操作部52に表示させる。
装置確認画面D4cには、入力操作手順を示すメッセージ、装置選択画面D4b(図5B)で選択された作業装置2の固有情報、設定キーB37~B39、次へキーB9、及び戻るキーB8が表示されている。作業装置2の固有情報には、作業装置2の名称、作業装置2による前回作業の有無、作業装置2の寸法情報、及び作業装置2のタイプが含まれている。即ち、装置選択画面D4bで選択された作業装置2の詳細な仕様が、装置確認画面D4cで表示される。図5B及び図5Cでは、予め登録された作業装置2の固有情報が画面D4b、D4cに表示されている。
図5Cに示すように、作業装置2の寸法情報には、作業装置2の全幅、作業幅、全長、及び作業位置が含まれている。作業装置2のタイプには、耕うん装置である作業装置2を回転駆動させるための副変速機(図示省略)の速度段、昇降装置8による作業装置2の昇降の有無、及び農業機械1のPTO(Power take-off)との連動の有無が含まれている。
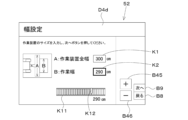
設定キーB37~B39は、作業装置2の寸法情報又はタイプを設定及び変更するためのキーである。詳しくは、ユーザが幅設定キーB37を選択すると、制御部51は、図5Dに示す幅設定画面D4dを表示操作部52に表示させる。幅設定画面D4dでは、作業装置2の全幅(画面D4d中の幅A)及び作業幅(画面D4d中の幅B)の設定値を変更することが可能である。ユーザが全幅の入力欄K1又は作業幅の入力欄K2を選択した後、プラスキーB45又はマイナスキーB46を操作(タップ操作)して、スケールK11上のカーソルK12を左右に移動させることで、全幅又は作業幅の変更値を入力欄K1、K2に入力することができる。図5Dでは、作業装置2の作業幅(B)は、全幅(A)より狭くなっているが、作業装置2の種類によっては、作業幅(B)が全幅(A)より広くなることもある。
また、ユーザが長さ設定キーB38を選択すると、制御部51は、図5Eに示す長さ設定画面D4eを表示操作部52に表示させる。長さ設定画面D4eでは、作業装置2の全長及び作業位置の設定値を変更することが可能である。全長は、昇降装置8のロアリンク8b(図1、図2)に対する作業装置2の連結位置から後端までの長さのことである(画面D4e中の長さC)。作業位置は、ロアリンク8bに対する作業装置2の連結位置から対地作業が可能な前端位置までの長さのことである(画面D4e中の長さD)。ユーザが全長(C)の入力欄K3又は作業位置(D)の入力欄K4を選択した後、プラスキーB45又はマイナスキーB46を操作して、カーソルK12を左右に移動させることで、全長(C)又は作業位置(D)の変更値を入力欄K3又は入力欄K4に入力することができる。
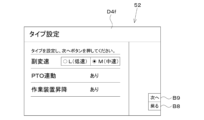
また、ユーザがタイプ設定キーB39を選択すると、制御部51は、図5Fに示すタイプ設定画面D4fを表示操作部52に表示させる。タイプ設定画面D4fでは、作業装置2のタイプの設定を変更することが可能である。詳しくは、ユーザがL(低速)キーB4
0aを選択することで、副変速機の速度段として低速段を入力することができ、ユーザがM(中速)キーB40bを選択することで、副変速機の速度段として中速段を入力することができる。作業装置2における農業機械1のPTOとの連動と昇降装置8による昇降とは、両方とも「有り」に固定されていて、タイプ設定画面D4fでは変更不可になっている。他の例として、作業装置2における農業機械1のPTOとの連動と昇降装置8による昇降のそれぞれについて、「有り」と「無し」のいずれか選択するキーをタイプ設定画面D4fに設けてもよい。
設定画面D4d、D4e、D4fで、上記のようにユーザが作業装置2の寸法情報又はタイプの変更値を入力してから、次へキーB9を選択すると、制御部51は、設定画面D4d~D4fでの寸法情報又はタイプの変更内容を反映した装置確認画面D4cを、例えば図5Gに示すように表示操作部52に表示させる。図5Gに示す変更後の装置確認画面D4cでは、図5Cに示した変更前の装置確認画面D4cに対して、作業装置2の全幅、作業幅、全長、及び作業位置がそれぞれ大きくなるように変更され、副変速の速度段が中速段に変更されている。
なお、設定画面D4d、D4e、D4fで、ユーザが戻るキーB8を選択すると、記録部51eは、設定画面D4d、D4e、D4fでの作業装置2の寸法情報又はタイプの変更内容を無効にし、図5Cに示した未変更の装置確認画面D4cを表示操作部52に表示させる。この場合、作業装置2の寸法情報又はタイプが変更されることはない。
装置確認画面D4cで、ユーザが次へキーB9を選択すると、制御部51は、装置確認画面D4cに表示されている設定情報(作業装置2の名称と寸法情報とタイプと前回作業の有無)を内部メモリに記憶させ、図6に示す圃場選択画面D5を表示操作部52に表示させる。
圃場選択画面D5には、登録された1つ以上の圃場マップMP2、上矢印キーB41、下矢印キーB42、次へキーB9、及び戻るキーB8が表示されている。図6では、3つの圃場マップMP2を表示している。予め登録された圃場マップMP2が4つ以上ある場合は、ユーザが上矢印キーB41又は下矢印キーB42を選択することで、制御部51が他の圃場マップMP2を圃場選択画面D5に表示させる。
ユーザがいずれかの圃場マップMP2を選択すると、制御部51は、選択された圃場マップMP2を他の圃場マップMP2とは異なる表示形態で表示させる。図6では、選択された圃場マップMP2だけを太線枠で囲っている。また、制御部51は、選択された圃場マップMP2で農作業を行った前回の作業日時と、当該圃場マップMP2の面積とを圃場選択画面D5に表示させる。いずれかの圃場マップMP2が選択された状態で、ユーザが次へキーB9を選択すると、制御部51が、選択された圃場マップMP2の情報を内部メモリに記憶させ、図7に示すルート作成1画面D6を表示操作部52に表示させる。なお、圃場マップMP2の情報には、圃場マップMP2の識別情報、輪郭、面積、及び前回の作業日時と、圃場マップMP2に対応する圃場の識別情報、位置、及び輪郭などが含まれている。
図7に示すルート作成1画面D6には、選択された圃場マップMP2(対応する圃場の輪郭H1)、農業機械マークX1、入力操作手順を示すメッセージ、作業キーB43a、B43b、B44、次へキーB9、及び戻るキーB8が表示されている。作業キーB43a、B43b、B44は、農業機械1の走行ルートを作成するための設定を行うキーである。言い換えれば、作業キーB43a、B43b、B44は、農業機械1(走行車体3)及び作業装置2により圃場に対して農作業を行うための作業条件を設定するキーである。
より詳しくは、自動中央作業キーB43aは、後述するように圃場マップMP2に設定された中央エリアで、農業機械1の走行車体3を自動運転で走行させながら作業装置2により農作業をするか否かを選択するためのキーである。自動枕地作業キーB43bは、後述するように圃場マップMP2に設定された枕地で、農業機械1の走行車体3を自動運転で走行させながら作業装置2により農作業をするか又は農作業をしないかを選択するためのキーである。
作業タイプキーB44は、作業装置2で行う作業状態を選択するためのキーである。本実施形態では、図4の作業選択画面D3で耕うん作業が選択された場合を例に挙げているため、図7の作業タイプキーB44は、耕うん作業のタイプが隣接作業であるか又は間接作業であるかを選択するためのキーとなっている。図4の作業選択画面D3で他の作業が選択された場合には、図7の作業タイプキーB44は、当該他の作業の状態を選択するためのキーとなる。
図7では、自動中央作業キーB43aにより、圃場の中央エリアで農業機械1を自動運転で走行させながら作業装置2で農作業を行うことが選択された状態を示している。また、自動枕地作業キーB43bにより、圃場の枕地で農業機械1を自動運転で走行させながら作業装置2で農作業を行うことが選択された状態を示している。さらに、作業タイプキーB44により、耕うん作業のタイプとして隣接作業が選択された状態を示している。ユーザが次へキーB9を選択すると、制御部51は、ルート作成1画面D6に表示されている作業条件(作業キーB43a、B43b、B44による設定内容)を内部メモリに記憶させ、図8Aに示すルート作成2画面D7を表示操作部52に表示させる。
ルート作成2画面D7には、選択された圃場マップMP2、農業機械マークX1、入力操作手順を示すメッセージ、複数の設定項目とそれらの数値入力欄、推奨キーB12、ルート作成キーB13、軌跡予測キーB14、プラスキーB45、マイナスキーB46、次へキーB9、及び戻るキーB8が表示されている。ルート作成2画面D7の表示中に、制御部51は、測位装置40により検出された実際の走行車体3の位置を通信部54により取得し、当該走行車体3の位置に応じた圃場マップMP2上の該当箇所に農業機械マークX1を表示させてもよい。
ルート作成2画面D7中の複数の設定項目は、走行ルートを作成するための作成条件であり、且つ農業機械1及び作業装置2により圃場に対して農作業を行うための作業条件である。当該設定項目には、予想作業距離、枕地数、自動運転枕地数、作業方向、枕地の重なり代、及び中央部の重なり代が含まれている。このうち、予想作業距離以外の項目に対して数値入力が可能である。枕地数とは、登録された圃場の輪郭H1(圃場マップMP2)の内側に当該輪郭H1に沿って一重以上設定する枕地の数のことである。自動運転枕地数とは、設定した枕地数のうち、農業機械1を自動運転で走行させながら作業装置2で農作業を行う枕地の数のことである。
作業方向とは、圃場の枕地の内側にある中央部で走行車体3を直進で往復させながら作業装置2で作業を行う方向のことである。作業方向の数値入力欄に所定の数値(例えば「1」又は「4」など)を入力することで、当該数値に対応するルート作成2画面D7の上、下、左、右の各方向が設定される。枕地の重なり代とは、枕地に対する作業装置2の作業幅の食み出し代のことである。中央部の重なり代とは、圃場の中央部で走行車体3を直進で往復させながら作業装置2で作業を行う際の作業幅同士の重なり代のことである。
ルート作成2画面D7において、ユーザが各設定項目の数値入力欄を選択して、プラスキーB45又はマイナスキーB46を操作することで、各数値入力欄に数値を入力することができる。また、ユーザが推奨キーB12を選択することで、制御部51が、予め記憶
部53に記憶された推奨値のうち、作業選択画面D3(図4)で選択された農作業に応じた各設定項目の推奨値を読み出して、当該推奨値を対応する数値入力欄に入力(表示)する。
ユーザが、ルート作成2画面D7の各設定項目に数値を入力した後、ルート作成キーB13を選択すると、制御部51が、当該各設定項目の数値を内部メモリに記憶させる。また、エリア設定部51b(図1)が、図8Bに示すように、圃場マップMP2に中央エリア(第2エリア)C1と枕地エリア(第1エリア)E1とを設定する。さらに、ルート作成部51c(図1)が、圃場マップMP2に走行ルート(走行予定ルート)L1を作成する。
図9A~図9Dは、エリアC1、E1と走行ルートL1の設定方法を説明するための図である。ルート作成キーB13がユーザにより選択されると、まずエリア設定部51bが、圃場の輪郭H1、作業装置2の作業幅、ルート作成2画面D7で入力された枕地数、又は枕地の重なり代に基づいて、中央エリアC1と枕地エリアE1とを設定する。詳しくは、例えばエリア設定部51bは、図9Aに示すように、作業装置2の作業幅W1から枕地の重なり代W2を減算した幅W4で、圃場の輪郭H1を枕地数と同じ回数で内側にオフセットすることによって形成される輪郭Hc、Hb、Haを演算する。そして、エリア設定部51bは、そのうち最も内側に形成される輪郭Haで囲まれるエリア(中央部)を、中央エリアC1として設定する。
他の例として、エリア設定部51bは、作業装置2の作業幅(又は作業装置2の全幅)で、圃場の輪郭H1を枕地数と同じ回数内側にオフセットすることで形成される輪郭を演算し、そのうち最も内側に形成される輪郭で囲まれるエリア(中央部)を中央エリアとして設定してもよい。
エリア設定部51bは、上記のように中央エリアC1を設定すると、当該中央エリアC1の外側で且つ圃場の輪郭H1の内側にある枠状のエリア(外枠部)を、枕地エリアE1として設定する。そして、エリア設定部51bは、各エリアC1、E1を示す位置などのデータを記憶部53に記憶させる。
ルート作成部51cは、設定されたエリアC1、E1、作業装置2の作業幅、入力された作業方向、枕地の重なり代、及び中央部の重なり代に基づいて、走行ルートL1を作成する。詳しくは、まずルート作成部51cは、図9Bに示すように、作業方向(図9Bで上下方向)と平行な中央エリアC1の一方の端部(図9Bでは右端部)から、作業装置2の作業幅W1で順に区切ることによって、中央エリアC1内に複数の単位作業区画C2を作成していく。この際、ルート作成部51cは、最初に作成する単位作業区画C2では、枕地エリアE1に対して作業幅W1を枕地の重なり代W2だけ重ならせる。また、ルート作成部51cは、2番目以降に作成する単位作業区画C2では、1つ前に作成した単位作業区画C2に対して作業幅W1を中央部の重なり代W3だけ重ならせる。
次に、ルート作成部51cは、図9Cに示すように、単位作業区画C2毎に、走行車体3が直進する直進ルートL1aを作成する。この際、ルート作成部51cは、単位作業区画C2の幅方向(図9Cでは左右方向)の中心線上に、当該単位作業区画C2の長手方向の両端部を結ぶ直線状の直進ルートL1aを作成する。なお、最後に作成された単位作業区画C2(図9Bでは中央エリアC1の左端部にある単位作業区画C2)では、当該単位作業区画C2に作成された直進ルートL1aが中央エリアC1の外側に作成された場合は、ルート作成部51cが当該直進ルートL1aを走行ルートL1から除外してもよい。
次に、ルート作成部51cは、隣り合う直進ルートL1a同士をつなぐルートL1bを
、枕地エリアE1に作成する。このルートL1bは、隣り合う2本の直進ルートL1aのうち、一方から他方へ向かうように走行車体3が旋回する旋回ルートである。
なお、図9Cでは、簡素な半円状の旋回ルートL1bを例示しているが、この形は表示操作部52の表示画面に表示し易くしたり、当該表示画面で走行ルートL1を視認し易くしたりするなどの便宜を図ったためである。実際に走行車体3が一方の直進ルートL1aに基づいて走行した後、他方の直進ルートL1aに向かって旋回する際は、走行車体3が前進又は後進しながら旋回するため、旋回ルートL1bよりも複雑な形状の軌跡を描く。即ち、旋回ルートL1bは、表示操作部52への表示用のルートであって、農業機械1が旋回ルートL1bに基づいて旋回しないこともある。ルート作成部51cは、半円状以外の形状の旋回ルートL1bを作成してもよい。後述する旋回ルートL1rについても同様である。
農業機械1の制御装置60(図1)は、直進ルートL1aに基づいて走行車体3を走行させているときに、昇降装置8(図2)により作業装置2を下降させて、当該作業装置2により対地作業を行う。また、自動制御部61は、旋回ルートL1bに対応する箇所で走行車体3を旋回させるとき、即ち一方の直進ルートL1aから他方の直進ルートL1aへ向かって走行車体3を旋回するときに、昇降装置8により作業装置2を上昇させて、作業装置2による対地作業を停止する。
即ち、直進ルートL1aは、農業機械1の走行車体3を自動運転で走行させながら作業装置2により対地作業を行う作業ルートである。また、直進ルートL1aが複数作成された中央エリアC1は、走行車体3を自動運転で直進させつつ往復させながら作業装置2により対地作業を行う作業エリアである。なお、作業ルートは、直進ルートL1aのような直線状のルートに限らず、曲線状のルートであってもよい。また、作業エリアには、直線状の作業ルートと曲線状の作業ルートのうち、少なくとも一方の作業ルートを1つ以上作成すればよい。
例えば、図7のルート作成1画面D6で、自動中央作業キーB43aにより中央エリアC1で作業することが選択され、自動枕地作業キーB43bにより枕地で作業しないことが選択され、作業タイプキーB44により隣接作業が選択される。この場合、ルート作成部51cは、図9Cに示すように、直進ルートL1aと旋回ルートL1bとから構成される走行ルートL1を作成する。また、ルート作成部51cは、中央エリアC1の両側にある直進ルートL1aの端部のうち、旋回ルートL1bとつながっていない一方の直進ルートL1aの端部(図9Cで右端の直進ルートL1aの上端部)にスタート位置Psを設定し、他方の直進ルートL1aの端部(図9Cで左端の直進ルートL1aの下端部)にゴール位置Pgを設定する。
上記のように走行ルートL1の作成が終了すると、制御部51は、エリアC1、E1、走行ルートL1、スタート位置Ps、及びゴール位置Pgをルート作成2画面D7に表示させ、且つそれらをルート情報として内部メモリに記憶させる。また、ルート作成部51cが、全ての直進ルートL1aに基づいて走行車体3を走行させながら、作業装置2により対地作業を行う予想作業距離を演算する。そして、制御部51が、当該予想作業距離をルート作成2画面D7に表示する。
一方、図7のルート作成1画面D6で、自動中央作業キーB43aにより中央エリアC1で作業することが選択され、自動枕地作業キーB43bにより枕地で作業することが選択され、作業タイプキーB44により隣接作業が選択される。この場合、ルート作成部51cが、直進ルートL1aと旋回ルートL1bに加えて、図9Dに示すように中央エリアC1の外側を周回する周回ルートL1cを枕地エリアE1に作成する。このとき、例えばルート作成部51cは、エリア設定部51bにより中央エリアC1の外側に一重以上設定された枕地E2a、E2b、E2cのうち、中央エリアC1に対して最も近い枕地E2aに、周回ルートL1cを作成する。
また、ルート作成部51cは、中央エリアC1の両端(図9Dで左右の端)にある直進ルートL1aの両端部のうち、旋回ルートL1bとつながっていない一方の直進ルートL1aの端部(図9Dで右端の直進ルートL1aの上端部)にスタート位置Psを設定し、他方の直進ルートL1aの端部(図9Dで左端の直進ルートL1aの下端部)に周回ルートL1cをつなげる。また、ルート作成部51cは、直進ルートL1aとつながっていない周回ルートL1cの端部に、ゴール位置Pgを設定する。
周回ルートL1cは、走行車体3を自動運転で走行させながら作業装置2により対地作業を行う作業ルートである。周回ルートL1cには、略真っ直ぐな直進ルートL1sと、所定の曲率半径以上で湾曲した旋回ルートL1rとが複数含まれている。直進ルートL1sは、枕地E2aの幅方向の中心線上に作成されている。周回ルート(走行ルート)L1cの進行方向に対して前後に並ぶ一方の直進ルートL1sと他方の直進ルートL1sとは、延伸方向(進行方向)が異なっている。旋回ルートL1rは、その一方の直進ルートL1sと他方の直進ルートL1sとをつないで、一方の直進ルートL1sから他方の直進ルートL1sに向かって走行車体3を旋回させるルートである。
図9Dでは、便宜上、簡素な円弧状の旋回ルートL1bを例示している。然るに、実際に農業機械1などが一方の直進ルートL1sから他方の直進ルートL1sに向かって旋回する際は、前進だけでなく、後進又は切り返しを行って、円弧状よりも複雑な形状の軌跡を描くことがある。即ち、旋回ルートL1rは、表示操作部52への表示用のルートであって、農業機械1が旋回ルートL1rに基づいて旋回しないこともある。ルート作成部51cは、円弧状以外の形状の旋回ルートL1rを作成してもよい。
圃場の輪郭H1の形状によっては(例えば圃場の輪郭H1が歪んでいる場合)、直進ルートL1sと旋回ルートL1rとに加えて、所定の曲率半径未満で湾曲した緩いカーブ部分(曲線状のルート、図示省略)が周回ルートL1cに含まれてもよい。またこの場合、自動制御部61は、周回ルートL1cの直進ルートL1s又は緩いカーブ部分に基づいて走行車体3が自動運転で走行しているときに、作業装置2により対地作業を行ってもよい。即ち、直進ルートL1sと上記緩いカーブ部分とは、作業ルートである。
また、自動制御部61は、旋回ルートL1rに対応する箇所で走行車体3を旋回させるとき、即ち一方の直進ルートL1sから他方の直進ルートL1sへ向かって走行車体3を旋回させるときに、昇降装置8により作業装置2を上昇させて、作業装置2による対地作業を停止する。また、自動制御部61は、中央エリアC1の一方の直進ルートL1aから、枕地エリアE1の一方の直進ルートL1sへ向かって走行車体3を旋回させるときにも、昇降装置8により作業装置2を上昇させて、作業装置2による対地作業を停止する。
上記のように周回ルートL1cが作成された枕地E2aは、走行車体3が中央エリアC1の外側を周回しながら作業装置2により対地作業を行う作業エリアである。他の例として、枕地E2aの外側にある他の枕地E2b、E2cにも、ルート作成部51cが周回ルートを作成してもよい。また、周回ルートを作成する枕地の数を入力するキーを、ルート作成2画面D7に設けてもよい。
さらに、ルート作成部51cが、複数の枕地E2a、E2b、E2cのうち、少なくとも1つの枕地に複数回周回する周回ルートを作成してもよいし、又は隣り合う一方の枕地と他方の枕地の両方を通るように周回ルートを作成してもよい。即ち、ルート作成部51
cは、中央エリアC1の周囲を枕地数以上の回数で周回するような周回ルートを枕地エリアE1に作成してもよい。
上述したように、ルート作成部51cは、直進ルートL1aと旋回ルートL1bと周回ルートL1cとから構成される走行ルートL1を作成した後、当該走行ルートL1のスタート位置Psとゴール位置Pgを設定する。そして、制御部51が、図8Bに示すように、エリアC1、E1、走行ルートL1、スタート位置Ps、及びゴール位置Pgといったルート情報をルート作成2画面D7に表示させる。また、ルート作成部51cが、全ての直進ルートL1a、L1sに基づいて、走行車体3を走行させながら作業装置2により対地作業を行う予想作業距離を演算する。そして、制御部51が、当該予想作業距離をルート作成2画面D7に表示する。
ルート作成2画面D7に走行ルートL1などが表示された後、ユーザが軌跡予測キーB14を選択する。これにより、制御部51が、走行ルートL1に基づいて走行車体3を自動運転で走行させながら作業装置2により対地作業を行うことが予測される作業部分、即ち作業装置2の予測作業軌跡を演算する。そして、制御部51は、ルート作成2画面D7中の圃場マップMP2の走行ルートL1上に予測作業軌跡を重ねるように表示させる(図示省略)。
また、ルート作成2画面D7に走行ルートL1などが表示された後、ユーザが次へキーB9を選択すると、制御部51は、図10に示す自動確認画面D9を表示操作部52に表示させる。このとき、制御部51の内部メモリには、ルート作成2画面D7の左部に表示されていたエリアC1、E1、走行ルートL1、スタート位置Ps、及びゴール位置Pgといったルート情報と、右部に表示されていた作業条件(各設定項目の数値)とが既に記憶されている。
図10に示す自動確認画面D9には、入力操作手順を示すメッセージ、自動運転作業情報、設定キーB47~B49、次へキーB9、及び戻るキーB8が表示されている。自動運転作業情報は、農業機械1を自動運転しながら、作業装置2により農作業を行うための作業条件である。自動運転作業情報には、農作業時のエンジン(原動機4)の回転数、農作業時の走行車体3の車速、旋回時の走行車体3の車速、PTO変速段、旋回方法、及び走行ルートL1に対する走行車体3の進入精度などが含まれている。図10では、予め登録された自動運転作業情報が自動確認画面D9に表示されている。
ユーザは、駆動設定キーB47を選択して、所定の入力操作を行うことで、農作業時のエンジン(原動機4)の回転数、農作業時の走行車体3の車速、旋回時の走行車体3の車速、PTO変速段を変更することができる。また、ユーザは、旋回設定キーB48を選択して、所定の入力操作を行うことで、農業機械1の旋回方法を変更することができる。さらに、ユーザは、精度設定キーB49を選択して、所定の入力操作を行うことで、走行ルートL1に対する走行車体3の進入精度を変更することができる。
自動確認画面D9で、ユーザが次へキーB9を選択すると、制御部51が、当該画面D9に表示されていた作業条件である自動運転作業情報を内部メモリに記憶させ、図11に示す走行制御画面D8を表示操作部52に表示させる。また、制御部51は、内部メモリに記憶された設定情報に基づいて自動走行データを生成し、当該自動走行データを通信部54により農業機械1の制御装置60に送信(出力)する。自動走行データには、ルート情報、作業装置2のタイプ、及び自動運転作業情報が含まれている。そのうち、ルート情報に含まれる走行ルートL1の情報には、作業ルートである直進ルートL1a、L1sの位置を示す情報が含まれ、旋回ルートL1b、L1rの位置を示す情報は含まれていなくてもよい。
図11に示す走行制御画面D8は、自動走行作業モードにおける農業機械1の走行状態及び作業装置2による作業状態を表示する画面である。なお、図11では、自動走行作業モードが開始されてからしばらくした後の農業機械1の走行状態と作業状態を、走行制御画面D8に表示している。走行制御画面D8には、圃場マップMP2、走行ルートL1、スタート位置Ps、ゴール位置Pg、農業機械マークX2、農業機械1の走行状態、設定変更キーB20、状態表示キーB21、作業軌跡キーB15、及び軌跡クリアキーB16が表示されている。
制御部51は、測位装置40により検出された実際の走行車体3の位置を所定の周期で通信部54により取得し、当該走行車体3の位置に応じた圃場マップMP2上の該当箇所に、農業機械マークX2を随時表示させる。即ち、走行制御画面D8中の農業機械マークX2は、農業機械1の走行車体3の実際の位置を示している。
例えばユーザが走行制御画面D8を見ながら、農業機械1を手動運転でスタート位置Psに移動させた後、モードスイッチ65(図1)で自動走行作業モードに移行するための所定の操作を行う。これにより、自動制御部61(図1)は、自動走行作業モードに移行し、農作業支援装置50から受信した自動走行データと、測位装置40により検出された走行車体3の位置とに基づいて、走行車体3を自動運転で走行させながら作業装置2により対地作業を行う。
詳しくは、自動制御部61は、まず自動走行データに含まれるルート情報を読み込んで、走行ルートL1(作業ルートL1a、L1s)、スタート位置Ps、及びゴール位置Pgを把握する。そして、自動制御部61は、スタート位置Psから走行ルートL1の直進ルートL1aに基づいて、走行車体3を自動運転で走行させながら作業装置2により対地作業を行う。走行車体3(農業機械1)が一方の直進ルートL1aの終端に到達すると、自動制御部61は、作業装置2による対地作業を一旦停止して、作業装置2を上昇させ、隣接する他方の直進ルートL1aの始端に向かって走行車体3を旋回させる。即ち、自動制御部61は、旋回ルートL1bに対応する箇所で、農業機械1及び作業装置2を旋回させる。この際、自動制御部61は、エリアC1、E1の位置情報、直進ルートL1aの位置情報、農業機械1及び作業装置2の寸法情報、測位装置40により検出された走行車体3の位置、及び検出装置64の検出結果などに基づいて、農業機械1及び作業装置2を旋回させる。
そして、自動制御部61は、走行車体3が他方の直進ルートL1aの始端に到達すると、作業装置2を下降させ、他方の直進ルートL1aに基づいて走行車体3を自動運転で走行させ始めるときに、作業装置2による対地作業を再開する。これにより、走行車体3が自動運転で中央エリアC1を往復直進し、中央エリアC1に対して作業装置2により対地作業が行われる。
その後、自動制御部61は、周回ルートL1cと走行車体3の位置とに基づいて、走行車体3を自動運転で走行させながら作業装置2により対地作業を行う。この際、自動制御部61は、直進ルートL1sに基づいて、走行車体3を自動運転で走行させながら作業装置2により対地作業を行い、旋回ルートL1rに対応する箇所で走行車体3を旋回させるときには、作業装置2を上昇させて、作業装置2による対地作業を停止する。この旋回時に、自動制御部61は、エリアC1、E1の位置情報、直進ルートL1sの位置情報、農業機械1及び作業装置2の寸法情報、測位装置40により検出された走行車体3の位置、及び検出装置64の検出結果などに基づいて、農業機械1及び作業装置2を旋回させる。それにより、走行車体3が中央エリアC1の外側を自動運転で周回し、作業装置2が中央エリアC1を囲む枕地E2a(図9Dなど参照)に対して対地作業を行う。
図12A~図12Dは、農業機械1の自動操舵を説明するための図である。自動走行作業モードにおいて、自動制御部61は走行車体3を自動で走行させながら、測位装置40により検出された走行車体3の位置と走行ルートL1(作業ルートL1a、L1s)との偏差を演算する。当該偏差が閾値未満である場合は(例えば図12A)、自動制御部61は、操舵軸31(図1)の回転角を維持する。走行車体3の位置と走行ルートL1との偏差が閾値以上であって、走行車体3が走行ルートL1に対して左側に位置している場合は(例えば図12B)、自動制御部61は、走行車体3の操舵方向が右方向となるように、操舵軸31を回転させる。走行車体3の位置と走行ルートL1との偏差が閾値以上であって、走行車体3が走行ルートL1に対して右側に位置している場合は(例えば図12C)、自動制御部61は、走行車体3の操舵方向が左方向となるように、操舵軸31を回転させる。
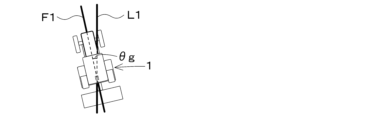
上記の例では、走行車体3の位置と走行ルートL1との偏差に基づいて、操舵装置29の操舵角を変更しているが、他の例として、図12Dに示す走行ルートL1に対する走行車体3の進行方向F1の角度θgに基づいて、操舵装置29の操舵角を変更してもよい。この場合、例えば自動制御部61が、走行車体3の位置の変化から走行車体3の進行方向F1を演算し、さらに走行ルートL1に対する進行方向F1の角度θgを演算する。そして、自動制御部61は、角度θgが閾値以上である場合に、走行車体3の進行方向F1が走行ルートL1の方位と一致する(即ち、θg=「0°」になる)ように操舵軸31を回転させる。
また、他の例として、自動制御部61は、走行車体3の位置と走行ルートL1との偏差に基づいて第1操舵角を演算し、走行ルートL1と走行車体3の進行方向F1とに基づいて第2操舵角を演算してもよい。そして、自動制御部61は、第1操舵角と第2操舵角とに基づいて第3操舵角を演算し、当該第3操舵角に基づいて操舵軸31を回転させてもよい。
また、自動制御部61は、走行ルートL1に基づいて走行車体3を自動で走行させているときに、走行車体3の位置の変化に基づいて走行車体3の実際の車速を演算する。そして、実際の車速が直進ルートL1a、L1s又は旋回動作に対応付けられた車速と一致するように、変速装置5、制動装置6、及び原動機4の駆動を制御する。
上述したように、農業機械1の自動走行作業モードにおいて、自動制御部61は、走行ルートL1と走行車体3(農業機械1)の位置とに基づいて、走行車体3の走行速度を自動で変更しながら、走行車体3の操舵を自動で行う。また、自動制御部61は、作業装置2による農作業(対地作業)を自動で実行したり停止したりする。
農作業支援装置50の状況検出部51d(図1)は、自動走行作業モードにおいて、測位装置40と検出装置64の検出結果、又は制御装置60から取得したログデータに基づいて、農業機械1及び作業装置2の動作状態を検出する。図11に示す走行制御画面D8において、ユーザが状態表示キーB21を選択すると、制御部51が、状況検出部51dにより検出された農業機械1と作業装置2の動作状態を、走行制御画面D8上にポップアップで表示させる。
また、ユーザが作業軌跡キーB15を選択すると、制御部51が、測位装置40により検出された走行車体3の位置と作業装置2の作業幅とに基づいて、作業装置2が対地作業を行った実際の作業軌跡を演算する。そして、制御部51が、圃場マップMP2の直進ルートL1a、L1s上に実際の作業軌跡(図10でハッチングで示す部分)を重ねるように表示させる。ユーザが軌跡クリアキーB16を選択すると、制御部51が作業軌跡の表示を消去する。
農業機械1の自動制御部61が、走行ルートL1と走行車体3の位置とに基づいて、走行車体3を自動運転で走行させながら作業装置2により対地作業を行うことで、作業装置2がゴール位置Pgに到着する。このとき、自動制御部61は自動走行作業モードを停止し、走行車体3及び作業装置2を停止させる。これにより、農業機械1及び作業装置2の自動走行作業モードでの走行ルートL1に基づく農作業が完了した状態となる。
上記農作業の完了状態が状況検出部51dにより検出されると、記録部51eは、制御部51の内部メモリに記憶された農業機械1の設定情報(図5Aの画面D4aの農作業の種別と農業機械1のタイプ)と、記憶部53に登録された対応する農業機械1の設定情報とを比較する。そして、内部メモリに記憶された農業機械1の設定情報と、記憶部53に登録された対応する農業機械1の設定情報とが一致していない場合に、記録部51eは、内部メモリに記憶された農業機械1の設定情報で、記憶部53に登録された対応する農業機械1の設定情報を更新(上書き)する。
また、記録部51eは、制御部51の内部メモリに記憶された作業装置2の設定情報(図5Cの画面D4cの作業装置2の寸法情報とタイプ)と、記憶部53に登録された対応する作業装置2の設定情報とを比較する。内部メモリに記憶された作業装置2の設定情報と、記憶部53に登録された対応する作業装置2の設定情報とが一致していない場合に、記録部51eは、内部メモリに記憶された作業装置2の設定情報で、記憶部53に登録された対応する作業装置2の設定情報を更新する。また、記録部51eは、記憶部53に登録された作業装置2の設定情報に含まれる前回作業(図5Bの画面D4b、図5Cの画面D4c)を「あり」に書き替える。
また、記録部51eは、制御部51の内部メモリに記憶された農業機械1の設定情報、作業装置2の設定情報、圃場の設定情報(図6の画面D5で選択された圃場マップMP2の情報)、作業条件(図7の画面D6と図8Aなどの画面D7と図10の画面D9の設定情報)、及びルート情報(図8Bの画面D7と図11の画面D8のエリアC1,E1、走行ルートL1、位置Ps、Pg)を、農業機械1の識別情報及び作業装置2の識別情報と関連付けて、作業履歴として記憶部53の所定の領域に記録(保存)してもよい。この場合、農業機械1及び作業装置2の自動走行作業モードでの走行ルートL1に基づく農作業を開始又は完了した日時を、上記作業履歴に含めてもよい。
農業機械1で実行可能なモードには、前述したように自動走行作業モードに加えて、自動操舵作業モードが含まれている。自動走行作業モード及び自動操舵作業モードでは、作業装置2による対地作業が適宜自動で行われる。農業機械1で実行可能な作業モードには、自動走行作業モードと自動操舵作業モードに加えて、手動運転作業モードが含まれている。手動運転作業モードでは、農業機械1のユーザが操作装置62のアクセル部材又はブレーキ部材を操作することにより、走行車体3の走行速度を変更し、且つハンドル30を操作することにより、走行車体3の操舵を行う。また、手動運転作業モードでは、作業装置2による対地作業の実行と停止は、ユーザが操作装置62により操作してもよいし、或いは自動制御部61が走行車体3の位置と走行ルートL1とに基づいて制御してもよい。上記の各モード以外にも、例えば、作業装置2による対地作業を自動で行わずに、走行車体3を自動運転で走行させる自動走行モード又は走行車体3の自動操舵を行う自動操舵モードが、農業機械1で実行可能である。
例えば図3に示したホーム画面D1において、ユーザがオートステアキーB2bを選択した場合、自動運転キーB2aを選択した場合の画面D3~D9と同様の画面が表示操作部52に順次表示される。そして、当該各画面において、ユーザは自動操舵作業モードを
実行するための各種設定を、自動運転作業モードを実行するための各種設定と同様に行うことができる。
制御部51は、自動操舵作業モードを実行するための各種設定情報を、自動運転作業モードを実行するための各種設定情報と同様に、内部メモリに記憶させる。ルート作成部51cは、制御部51の内部メモリに記憶された各種設定情報に基づいて、自動操舵作業モードの走行ルートを作成する。そして、制御部51は、走行ルートを含むルート情報を表示操作部52に表示させ、ルート情報などを含む自動操舵データを生成して、当該自動操舵データを通信部54により農業機械1に送信(出力)する。自動操舵データが農業機械1の通信部54により受信されると、制御装置60の自動制御部61が、自動操舵作業モードに移行し、自動操舵データに含まれる走行ルートと走行車体3の位置とに基づいて、走行車体3の操舵を自動で行いながら作業装置2により対地作業を行う。
ところで、例えば自動走行作業モードで走行ルートL1に基づいて農業機械1と作業装置2により圃場に対して農作業が行われている間に、諸事情によりユーザが、農業機械1の操作装置62で所定操作を行って、農業機械1及び作業装置2を停止させることがある。この場合、通知部51gが表示操作部52により、図13に示すような通知U1を走行制御画面D8上にポップアップで表示させる。
通知U1には、農業機械1の自動運転が停止された旨を示すメッセージと、後で農作業の続きを行う(再開する)ために、当該農作業を中断する場合の入力操作を示すメッセージと、終了キーB53と中断キーB54とが表示されている。ここで、ユーザが、後で農作業の続きを農業機械1で行わずに終了するために、終了キーB53を選択すると、制御部51が自動走行作業モードを停止し、走行ルートL1に基づく農作業が終了した状態となる。
上記農作業の終了状態が状況検出部51dにより検出されると、記録部51eは、作業装置2の識別情報を検出し、記憶部53に登録された情報のうち、当該作業装置2の識別情報に関連付けられた農業機械1及び作業装置2の設定情報を、制御部51の内部メモリに記憶された農業機械1及び作業装置2の設定情報でそれぞれ更新する。また、記録部51eは、更新した作業装置2の設定情報に含まれる固有情報のうち、前回作業の有無を示す情報を「あり」に書き替える。さらに、記録部51eは、制御部51の内部メモリに記憶された農業機械1の設定情報、作業装置2の設定情報、圃場の設定情報、作業条件、及びルート情報を、農業機械1の識別情報及び作業装置2の識別情報と関連付けて、作業履歴として記憶部53の所定の領域に記録してもよい。
一方、ユーザが、後で農作業の続きを農業機械1で行うために、中断キーB54を選択すると、制御部51が自動走行作業モードを停止し、自動走行作業モードでの走行ルートL1に基づく農作業が中断した状態となる。この農作業の中断状態が状況検出部51dにより検出されると、記録部51eは、作業装置2の識別情報を検出し、当該識別情報と、制御部51の内部メモリに記憶された設定情報、状況検出部51dの検出結果、農作業の中断日時、及び更新フラグなどとを関連付けて、図14Aに示すような中断データ70を生成する。そして、記録部51eは、中断データ70を記憶部53の所定の領域に記録させることにより、記録(保存)する。
図14A及び図14Bは、中断データ70を示す図である。中断データ70には、作業装置2の識別情報と農業機械1の識別情報とが含まれている。また、中断データ70には、制御部51の内部メモリに記憶された設定情報である、農業機械1の設定情報(図4の画面D3で設定された農作業の種別、図5Aの画面D4aで設定された農業機械1のタイプ)、作業装置2の設定情報(図5Bの画面D4bで選択され且つ図5Cの画面D4cで設定された作業装置2の固有情報(作業装置2の名称、寸法情報、タイプ、及び前回作業の有無))、圃場の設定情報(図6の画面D5で選択された圃場マップMP2の情報(圃場マップMP2の識別情報、輪郭、面積、及び前回の作業日時と、圃場マップMP2に対応する圃場の識別情報、位置、及び輪郭など))、及び作業条件(図7の画面D6で設定された作業内容、図8Aなどの画面D7の各設定項目の数値、図10の画面D9で設定された自動運転作業情報)が含まれている。
また、中断データ70には、状況検出部51dの検出結果として、走行ルートL1に基づく農業機械1及び作業装置2による農作業の実施状況が含まれている。当該農作業の実施状況には、農作業中断時の農業機械1及び作業装置2の停止位置と、農作業の中断日時などが含まれている。農作業の中断日時は、制御部51の内部メモリにより計時されている日時に基づいて、状況検出部51dが検出して、記録部51eに出力する。さらに、中断データ70には更新フラグ77が含まれている。記録部51eは、中断データ70の生成時に、図14Aに示すように更新フラグ77をオフにする。上述した情報以外に、例えば農業機械1で中断直前まで実行されていたモードなどを、記録部51eが中断データ70に含めて記憶部53に記録してもよい。
農業機械1と作業装置2による走行ルートL1に基づく農作業の中断中に、例えば作業装置2の交換、保守、又はその他事情により、農作業支援装置50に設定された作業装置2の寸法情報を変更したいという要望がある。これに対し、ユーザは、農作業支援装置50を操作して、作業装置2の寸法情報を変更することができる。具体的には、例えばユーザは、まず農作業支援装置50を起動させて、表示操作部52に表示されたホーム画面D1中の設定キーB0(図3)を選択して、所定の入力操作を行うことにより、装置確認画面D4c(図5C)を表示操作部52に表示させる。
そして、ユーザが、装置確認画面D4cで幅設定キーB37を選択して、図5Dに示した幅設定画面D4dを表示操作部52に表示させた後、前述したように幅設定画面D4dで作業装置2の全幅及び作業幅の変更値を入力欄K1、K2に入力する。また、ユーザが、装置確認画面D4cで長さ設定キーB38を選択して、図5Eに示した長さ設定画面D4eを表示操作部52に表示させた後、前述したように長さ設定画面D4eで作業装置2の全長及び作業位置の変更値を入力欄K3、K4に入力する。
ユーザが設定画面D4d、D4eのいずれかで、前述したように作業装置2の寸法情報の変更値を入力した後、次へキーB9を選択すると、制御部51は、当該寸法情報の変更内容を反映した装置確認画面D4cを、表示操作部52に表示させる。また、記録部51eが、作業装置2の寸法情報の変更値を受け付けて、当該変更値が入力された作業装置2の識別情報を検出する。そして、記録部51eは、記憶部53に記録されている中断データ70のうち、変更値が入力された作業装置2の識別情報と同一の識別情報が関連付けられた特定の中断データ70の作業装置2の寸法情報を読み込む。さらに、記録部51eは、特定の中断データ70の作業装置2の寸法情報と、上記同一の識別情報とを関連付けて、これらを復元データとして記憶部53の所定の領域に記録する。それから、記録部51eは、上記変更値を中断データ70の作業装置2の寸法情報に上書きして、当該寸法情報を更新する。さらに、記録部51eは、作業装置2の寸法情報を更新した中断データ70に含まれる更新フラグ77をオンにする(図14B参照)。
その後、ユーザが中断した農作業を再開するために、農作業支援装置50を起動させると、制御部51は、1つ以上の中断データ70が記憶部53に記憶されていることを確認して、図15に示すように作業再開キーB55を含むホーム画面D1aを表示操作部52に表示させる。ホーム画面D1aで、ユーザが作業再開キーB55を選択すると、制御部51は、図16に示すような中断作業選択画面D12を表示操作部52に表示させる。
中断作業選択画面D12には、中断データキーB61~B63が表示されている。制御部51は、記憶部53に記録されている中断データ70を全て読み出して、当該中断データ70の一部内容を対応する中断データキーB61~B63に表示する。当該中断データ70の一部内容には、中断日時、農作業の種別、農業機械1のタイプ、作業装置2の作業幅、作業タイプ、及び枕地作業数が含まれている。図16では、3つの中断データ70に対応する中断データキーB61~B63を表示しているが、4つ以上の中断データ70が記憶部53に記録されている場合は、ユーザが上矢印キーB41又は下矢印キーB42を選択することで、制御部51が他の中断データ70に対応する中断データキーを中断作業選択画面D12に表示させる。
中断作業選択画面D12の中断データキーB61~B63のうち、ユーザが再開したい農作業などの内容が示されたいずれかの中断データキーを選択した上で、作業詳細キーB56を選択すると、制御部51が、当該中断データキーに対応する特定の中断データ70を記憶部53から読み出す。そして、制御部51は、図17Aに示すように、特定の中断データ70の詳細な内容を示す中断作業詳細画面D13を表示操作部52に表示させる。
中断作業詳細画面D13には、特定の中断データ70に含まれる農作業の種別、作業装置2の構成、寸法情報、作業装置2と農業機械1のタイプ、農作業の実施状況、自動運転作業情報、及び圃場マップMP2などが表示されている。また、中断作業詳細画面D13には、上矢印キーB41、下矢印キーB42、次へキーB9、及び戻るキーB8が表示されている。ユーザが上矢印キーB41又は下矢印キーB42を選択することで、制御部51は、中断作業詳細画面D13に表示されていない特定の中断データ70の他の情報を中断作業詳細画面D13に表示させる。
中断作業詳細画面D13で、ユーザが次へキーB9を選択すると、制御部51は、特定の中断データ70に含まれる更新フラグ77を確認する。ここで、更新フラグ77がオフ(図14A)であった場合、エリア設定部51bが、特定の中断データ70に含まれる圃場の輪郭H1、作業装置2の作業幅、入力された枕地数、又は枕地の重なり代に基づいて、中央エリアC1と枕地エリアE1とを再設定する。また、ルート作成部51cが、特定の中断データ70に含まれる作業装置2の作業幅、入力された作業方向、枕地の重なり代、中央部の重なり代、及びエリアC1、E1に基づいて、走行ルートL1を再作成し、スタート位置Psとゴール位置Pgとを再設定する。即ち、農作業の中断中に更新されていない作業装置2の寸法情報に基づいて、ルート作成部51cが走行ルートL1を再作成する。
一方、中断作業選択画面D12で選択された中断データ70に含まれる更新フラグ77がオン(図14B)であった場合、通知部51g(図1)が表示操作部52により、図17Bに示すような通知U2を中断作業詳細画面D13上にポップアップで表示させる。通知U2には、作業装置2の寸法情報が更新された旨と、以降の走行ルートL1が農作業の中断時の走行ルートL1とは異なってしまう旨と、走行ルートL1が異なってもよいか否かの問いかけとを示すメッセージが表示されている。また、当該問いかけに応答するためのYESキーB71とNOキーB72とが通知U2には表示されている。
ユーザが、通知U2の内容を視認して、以降の走行ルートL1が中断時の走行ルートL1と異なってもよいと判断し、YESキーB71を選択する。この場合、エリア設定部51bが、中断作業選択画面D12で選択された特定の中断データ70に含まれる圃場の輪郭H1、作業装置2の作業幅、枕地数、又は枕地の重なり代に基づいて、中央エリアC1と枕地エリアE1とを再設定する。また、ルート作成部51cが、特定の中断データ70に含まれる作業装置2の作業幅、作業方向、枕地の重なり代、中央部の重なり代、及びエリアC1、E1に基づいて、走行ルートL1を再作成し、スタート位置Psとゴール位置Pgとを再設定する。即ち、ルート作成部51cは、農作業の中断中に更新された作業装置2の寸法情報に基づいて、走行ルートL1を再作成する。このため、再作成された走行ルートL1は、農作業の中断時の走行ルートとは異なる。
また、ユーザが、通知U2の内容を視認して、以降の走行ルートL1が中断時の走行ルートL1と異なるのはよくないと判断し、NOキーB72を選択する。この場合、通知部51gは表示操作部52により通知U2を消去してから、図17Cに示すような通知U3を中断作業詳細画面D13上にポップアップで表示させる。通知U3には、農作業の中断時と同じ作業装置2の情報(寸法情報)で走行ルートL1を作成するか否かの問いかけを示すメッセージと、当該問いかけに応答するためのYESキーB73とNOキーB74とが表示されている。
ユーザが、通知U3の内容を視認して、農作業の中断時と同じ作業装置2の情報で走行ルートL1を作成しないと判断し、NOキーB74を選択する。この場合、通知部51gは、通知U3を消去して、図17Bに示した通知U2を再度ポップアップで中断作業詳細画面D13上に表示させる。
また、ユーザが通知U3(図17C)の内容を視認して、農作業の中断時と同じ作業装置2の情報で走行ルートL1を作成すると判断し、YESキーB73を選択する。この場合、制御部51は、中断作業選択画面D12で選択された特定の中断データ70に含まれる作業装置2の識別情報を確認し、当該識別情報と関連付けられた復元データに含まれる作業装置2の寸法情報を記憶部53から読み出す。
そして、エリア設定部51bが、制御部51により読み出された復元データの寸法情報に含まれる作業幅(復元データの作業幅)と、特定の中断データ70に含まれる圃場の輪郭H1、枕地数、又は枕地の重なり代に基づいて、中央エリアC1と枕地エリアE1とを再設定する。また、ルート作成部51cが、上記復元データの作業幅、特定の中断データ70に含まれる作業方向、枕地の重なり代、中央部の重なり代、及びエリアC1、E1に基づいて、走行ルートL1を再作成し、スタート位置Psとゴール位置Pgとを再設定する。即ち、農作業の中断中に作業装置2の寸法情報が更新されても、更新前の作業装置2の寸法情報に基づいて、ルート作成部51cが走行ルートL1を再作成する。このため、再作成された走行ルートL1は、農作業の中断時の走行ルートと同一になる。
ルート作成部51cにより走行ルートL1が再作成されると、制御部51は、図18に示すように走行制御画面D8aを表示操作部52に表示させて、エリア設定部51b及びルート作成部51cにより再設定されたルート情報を、走行制御画面D8a中の圃場マップMP2に表示させる。また、制御部51は、農業機械1の現在位置を測位装置40と状況検出部51dにより取得し、当該農業機械1の現在位置X2と、特定の中断データ70に含まれる再開時の農業機械1の位置(図18では、黒塗りの三角印)X3とを、圃場マップMP2に表示させる。さらに、制御部51は、特定の中断データ70と再設定されたルート情報とに基づいて、自動走行データを生成し、当該自動走行データを通信部54により農業機械1の制御装置60に送信する。
その後、ユーザが走行制御画面D8aを見ながら、農業機械1を手動運転で再開位置X3に移動させた後、モードスイッチ65(図1)で自動走行作業モードに移行するための所定の操作を行う。これにより、自動制御部61(図1)は、自動走行作業モードに移行し、農作業支援装置50から受信した自動走行データと、測位装置40により検出された走行車体3の位置とに基づいて、走行車体3を自動運転で走行させながら作業装置2により対地作業を行う。即ち、中断されていた農作業が再開される。
そして、自動制御部61が、走行ルートL1と走行車体3の位置とに基づいて、走行車体3を自動運転で走行させながら作業装置2により対地作業を行うことで、農業機械1及び作業装置2がゴール位置Pgに到着する。このとき、自動制御部61は自動走行作業モードを停止し、走行車体3及び作業装置2を停止させる。これにより、再開した農作業が完了した状態となる。
農作業が再開される際に、制御部51により記憶部53から読み出された特定の中断データ70に含まれる更新フラグ77がオフであった場合には、当該農作業が再開された後、当該農作業の完了状態が状況検出部51dにより検出されたときに、記録部51eは、特定の中断データ70を記憶部53及び内部メモリから削除する。
また、農作業が再開される際に、特定の中断データ70の更新フラグ77がオンであり、且つ図17Bに示した通知U2のYESキーB71がユーザにより選択された場合には、当該農作業の再開後の完了状態が状況検出部51dにより検出されたときに、記録部51eは、特定の中断データ70に含まれる作業装置2の寸法情報で、記憶部53に予め登録された対応する作業装置2の寸法情報を更新する。詳しくは、記録部51eは、記憶部53に予め登録された作業装置2の寸法情報のうち、特定の中断データ70に含まれる作業装置2の識別情報と同一の識別情報が関連付けられた作業装置2の寸法情報を、特定の中断データ70に含まれる作業装置2の寸法情報で上書きする。それから、記録部51eは、特定の中断データ70に含まれる作業装置2の識別情報と同一の識別情報が関連付けられた復元データを記憶部53から削除し、特定の中断データ70を記憶部53及び内部メモリから削除する。
また、農作業が再開される際に、特定の中断データ70の更新フラグ77がオンであり、且つ図17Cに示した通知U3のYESキーB73がユーザにより選択された場合には、当該農作業の再開後の完了状態が状況検出部51dにより検出されたときに、記録部51eは、記憶部53に登録された作業装置2の寸法情報を更新しない。このとき、記録部51eは、特定の中断データ70に含まれる作業装置2の識別情報と同一の識別情報が関連付けられた復元データを記憶部53から削除し、特定の中断データ70を記憶部53及び内部メモリから削除する。
上述した実施形態では、更新フラグ77のオン・オフ状態により、農作業の中断中における作業装置2の寸法情報の更新の有無を判断する場合を例に説明したが、これに限定するものではない。これ以外に、例えば、走行ルートL1に基づく農作業の中断日時と、作業装置2の寸法情報の更新日時とを比較した結果から、農作業の中断中における作業装置2の寸法情報の更新の有無を判断してもよい。
具体的には、例えば記録部51eが、走行ルートL1に基づく農業機械1と作業装置2による農作業が中断されたときに、当該中断日時を作業装置2の識別情報と関連付けて、中断データ70に含めて記憶部53に記録する。また、記録部51eが、中断データ70に含まれる作業装置2の寸法情報を更新したときに、当該更新日時を作業装置2の識別情報と関連付けて、図19に示すように中断データ70に含めて記憶部53に記録する。
そして、更新日時78が含まれる中断データ70に基づいて、農業機械1と作業装置2により農作業が再開される際に、中断データ70に含まれる中断日時79より更新日時が新しい日時であった場合、通知部51gが、中断中に作業装置2の寸法情報が更新されたと判断して、通知U2、U3を表示操作部52に表示させる。また、中断データ70に含まれる中断日時79に対して更新日時78が同一日時又は古い日時であった場合、通知部51gが、中断中に作業装置2の寸法情報が更新されなかったと判断して、通知U2、U
3の表示を実行せず、ルート作成部51cが中断データ70に含まれる作業装置2の寸法情報と作業条件に基づいて、走行ルートL1を再作成する。
上述した実施形態では、走行ルートL1に基づく農業機械1と作業装置2による農作業が完了したときに、記録部51eが、制御部51の内部メモリに記憶された作業装置2の寸法情報などの設定情報(中断データ70に含まれる設定情報を含む。)で、記憶部53に予め登録された対応する設定情報を更新する例を示した。然るに、記憶部53に予め登録された設定情報の更新は、例えば、走行ルートL1に基づく農作業を開始する直前又は直後にも行ってもよい。
上述した実施形態では、中断時と同じ走行ルートL1で農作業を再開するために、復元データに含まれる更新前の寸法情報を用いて、走行ルートL1を再作成する例を示した。これ以外に、例えば、農作業の中断時に走行ルートL1を含むルート情報を、中断時ルート情報として記憶部53又は制御部51の内部メモリに記録しておき、農作業を再開する際に、制御部51が記憶部53又は内部メモリから中断時ルート情報を読み出して、当該中断時ルート情報に含まれる走行ルートL1を用いるようにしてもよい。
上述した実施形態では、自動運転作業モードでの走行ルートL1に基づく農業機械1と作業装置2による農作業が中断された後に、当該農作業が再開される場合を例に説明したが、これに限定するものではない。自動操舵作業モード又は手動運転作業モードなどでの走行ルートL1に基づく農業機械1と作業装置2による農作業が中断された後に、当該農作業が再開される場合にも、同様に中断中の作業装置2の寸法情報の更新の有無に応じて、走行ルートL1を再作成してもよい。また、農作業の中断前の農業機械1の作業モードと、当該農作業の再開後の農業機械1の作業モードとが、同一の作業モードであってもよいし、又は異なる作業モードであってもよい。
また、走行ルートL1に基づく農作業の中断中に、作業装置2の全幅、作業幅、全長、及び作業位置以外に、例えば昇降装置8による作業装置2の上昇位置(非作業時高さ)と下降位置(作業時高さ)などの他の寸法情報を入力する画面を表示操作部52に表示させてもよい。そして、記録部51eが、当該作業装置2の寸法情報の入力を受け付けて、対応する中断データに含まれる作業装置2の寸法情報を更新してもよい。
上述した実施形態では、圃場登録部51a、エリア設定部51b、ルート作成部51c、状況検出部51d、記録部51e、及び通知部51gが、農作業支援装置50の制御部51に設けられた例を示したが、これ以外に、例えば、上記各部51a、51b、51c、51d、51e、51gのうち、少なくとも1つが農業機械1の制御装置60に設けられたり、制御装置60とは別体の装置で構成されたりしてもよい。また、記憶部53は、農作業支援装置50に代えて、農業機械1に備わる制御装置60に設けられたり、農業機械1又はクラウド上にあるPCなどの電子装置に設けられたりしてもよい。
また、表示操作部52以外に、圃場マップMP2(圃場)、農業機械1、作業装置2、及び作業条件などの登録情報など(設定情報も含んでもよい。)を記憶したサーバ又は記憶媒体から、当該登録情報を入力するための通信回路又は入力インタフェイスにより入力部を構成してもよい。また、農作業支援装置50に設けられた表示操作部52及び通信部54以外に、農業機械1に搭載された通信回路、入力インタフェイス、ディスプレイ、タッチパッド、キー、又は出力インタフェイスにより、入力部、表示部、又は出力部を構成してもよい。
また、農作業支援装置50は、携帯型のタブレット端末装置以外に、例えばスマートフォン、又は農業機械1に固定された端末装置で構成されていてもよい。また、例えばクラウド上に設けられたサーバなどのような、農業機械1に搭載されないPCのような電子装置で農作業支援装置を構成してもよい。また、農作業支援装置に代えて、例えばユーザが保有する電子装置により、クラウド上から取得してインストール可能なアプリケーションプログラムを農作業支援システムに含めてもよい。この場合、当該アプリケーションプログラムで圃場登録部51a、エリア設定部51b、ルート作成部51c、状況検出部51d、記録部51e、及び通知部51gを構成し、当該アプリケーションプログラムをインストールした電子装置に備わる表示部又は当該電子装置に接続されたディスプレイ装置に、通知部からの通知を表示させてもよい。又は、通知部からの通知を音声にして、農業機械若しくは電子装置のスピーカなどから出力してもよい。
以上説明した本実施形態の農作業支援システム100、農業機械1、及び農作業支援装置50は、以下の構成を備え、効果を奏する。
本実施形態の農作業支援システム100は、農業機械1に連結された作業装置2の寸法情報と、農業機械1及び作業装置2により圃場に対して農作業を行うための作業条件とを入力する入力部(表示操作部)52と、入力部52により入力された寸法情報と作業条件とに基づいて、圃場を示すマップ(圃場マップ)MP2に農業機械1の走行ルートL1を作成するルート作成部51cと、農業機械1が走行ルートL1に基づいて走行して作業装置2により行われた農作業の状況を検出する状況検出部51dと、走行ルートL1に基づく農作業が中断されたときに、前記寸法情報と作業条件と状況検出部51dの検出結果とを作業装置2の識別情報と関連付けて中断データ70として記録する記録部51eと、走行ルートL1に基づく農作業の中断中に入力部52により作業装置2の寸法情報が変更された場合において、当該農作業が中断データ70に基づいて再開されるときに、前記寸法情報が変更された旨の通知U2を行う通知部51gと、を備える。
本実施形態の農業機械1は、農作業支援システム100により支援される農作業を行う農業機械であって、走行可能な走行車体3と、走行車体3に作業装置2を連結可能な連結部8g、8hと、走行車体3に連結された作業装置2の寸法情報と、当該農業機械1及び作業装置2により圃場に対して農作業を行うための作業条件とを入力する入力部52と、入力部52により入力された寸法情報と作業条件とに基づいて、圃場を示すマップMP2に走行車体3の走行ルートL1を作成するルート作成部51cと、走行車体3が走行ルートL1に基づいて走行して作業装置2により行った農作業の状況を検出する状況検出部51dと、走行ルートL1に基づく農作業が中断されたときに、前記寸法情報と作業条件と状況検出部51dの検出結果とを作業装置2の識別情報と関連付けて中断データ70として記憶部53に記録する記録部51eと、走行ルートL1に基づく農作業の中断中に入力部52により作業装置2の寸法情報が変更された場合において、当該農作業が中断データ70に基づいて再開されるときに、前記寸法情報が変更された旨の通知U2を行う通知部51gと、を備える。
本実施形態の農作業支援装置50は、農作業支援システム100に含まれる農作業支援装置であって、上記の入力部52と、ルート作成部51cと、状況検出部51dと、記録部51eと、通知部51gとを備える。
上記構成によれば、走行ルートL1に基づいた農業機械1及び作業装置2による農作業の中断中に、作業装置2の寸法情報が変更されたことを、当該農作業が再開される際に、ユーザに認識させることができる。このため、当該農作業が再開時に、例えば、農業機械の走行経路が、ユーザが想定している走行経路と異なったり、システムに設定された作業装置の寸法情報と、実際に用いる作業装置の寸法とが一致しなかったりするといった不利益が生じるのを抑制して、利便性を向上させることが可能となる。この効果は、例えば、農作業の中断中に作業装置2の寸法情報が更新されてから、当該農作業が再開されるまで
に長時間が経過した場合、又は農作業の中断中に作業装置2の寸法情報の更新を行ったユーザと、当該農作業を再開させるユーザとが異なる場合などに、有意義である。
本実施形態では、農作業支援システム100、農業機械1、及び農作業支援装置50は、入力部52により入力された前記寸法情報と作業条件とを作業装置2の識別情報と関連付けて記憶する記憶部53を備え、記録部51eは、走行ルートL1に基づく農作業が中断されたときに、中断データ70を記憶部53に記録し、走行ルートL1に基づく農作業の中断中に入力部52により入力された前記寸法情報を受け付けて、当該寸法情報に対応する作業装置2の識別情報と関連付けて記憶部53に記憶された中断データ70に含まれる前記寸法情報を更新し、ルート作成部51cは、中断データ70に基づいて農作業が再開される際に、当該中断データ70に含まれる前記寸法情報と作業条件とに基づいて走行ルートL1を再作成する。
上記により、ユーザは、走行ルートL1に基づいた農業機械1及び作業装置2による農作業の中断中に、中断データ70に含まれる作業装置2の寸法情報を更新することができる。また、当該寸法情報の更新が反映された走行ルートL1に基づいて農業機械1及び作業装置2により農作業を再開することができる。よって、農業機械1と作業装置2による農作業を中断した後、当該農作業を再開する場合に、利便性を一層向上させることが可能となる。
また、本実施形態では、農作業支援システム100は、走行ルートL1に基づく農作業の中断中に、再開する農作業の中断データ70を入力部52の入力操作により選択させるために、記憶部53に記録された中断データ70を表示する表示部(表示操作部)52を備え、表示部52に表示された中断データ70のうち、記録部51eにより更新された寸法情報を含む中断データ70が入力部52の入力操作により選択された場合、当該中断データ70に基づいて農作業が再開される前に、通知部51gは、寸法情報が更新された旨とともに、以降の走行ルートL1が農作業の中断時の走行ルートL1とは異なってしまう旨の通知U2を行う。
上記により、ユーザは、異なる走行ルートL1に基づく農業機械1及び作業装置2による農作業をそれぞれ中断しても、後で再開する農作業を選択することができる。また、走行ルートL1に基づく農作業の中断中に作業装置2の寸法情報が更新された旨と、それにより走行ルートL1が農作業の中断時の走行ルートL1とは異なってしまう旨とが、当該農作業が再開される際に、表示部52により通知されるので、上記各旨をユーザに視認させることができる。
また、本実施形態では、記録部51eは、走行ルートL1に基づく農作業の中断中に寸法情報を更新する際に、更新前の寸法情報とこれに関連付けられた作業装置2の識別情報とを復元データとして記憶部53に記録し、通知部51gは、記録部51eによる更新後の寸法情報を含む中断データ70に基づいて農作業が再開される際に、当該更新後の寸法情報と、当該更新後の寸法情報に関連付けられた作業装置2の識別情報と同一の識別情報が関連付けられた復元データに含まれる更新前の寸法情報とのうちの、いずれかを入力部52の入力操作により選択させるための通知U3を行い、ルート作成部51cは、入力部52の入力操作により選択された更新後の寸法情報又は更新前の寸法情報のいずれかに基づいて、走行ルートL1を再作成する。
上記により、ユーザは、走行ルートL1に基づく農作業の中断中に、作業装置2の寸法情報を更新しても、当該農作業を再開する際に、採用する走行ルートL1として、更新が反映された走行ルートL1と、更新が反映されていない中断時の走行ルートL1のいずれかを選択することができ、利便性を一層向上させることが可能となる。
また、本実施形態では、記録部51eは、走行ルートL1に基づく農作業が中断されたときに、更新フラグ77を作業装置2の識別情報と関連付けて中断データ70に含めて記憶部53に記録し、走行ルートL1に基づく農作業の中断中に中断データ70に含まれる寸法情報を更新したときに、当該中断データ70に含まれる更新フラグ77をオンし、通知部51gは、中断データ70に基づいて農作業が再開される際に、当該中断データ70に含まれる更新フラグ77がオンである場合に、通知U2、U3を実行する。これにより、走行ルートL1に基づく農作業の中断中に、作業装置2の寸法情報が更新されても、当該農作業が再開される際に、通知U2又は通知U3を表示操作部52に確実に表示して、当該通知U2、U3の内容をユーザに視認させることができる。
また、本実施形態では、記録部51eは、走行ルートL1に基づく農作業が中断されたときに、当該中断日時を作業装置2の識別情報と関連付けて中断データ70に含めて記憶部53に記録し、寸法情報を更新したときに、当該更新日時を作業装置2の識別情報と関連付けて中断データ70に含めて記憶部53に記録し(図19)、通知部51gは、更新日時が含まれる中断データ70に基づいて農作業が再開される際に、当該中断データ70に含まれる中断日時より更新日時が新しい日時である場合に、通知U2、U3を実行する。これにより、走行ルートL1に基づく農作業の中断中に、作業装置2の寸法情報が更新されても、当該農作業が再開される際に、通知U2又は通知U3を表示操作部52に確実に表示して、当該通知U2、U3の内容をユーザに視認させることができる。
また、本実施形態では、記録部51eは、再開された中断データ70に基づく農作業が完了したときに、記憶部53に予め登録された寸法情報のうち、中断データ70に含まれる更新後の寸法情報に関連付けられた作業装置2の識別情報と同一の識別情報が関連付けられた寸法情報を、中断データ70の更新後の寸法情報で更新する。これにより、走行ルートL1に基づく農作業の中断中に受け付けた作業装置2の寸法情報で、記憶部53に予め登録された作業装置2の寸法情報を更新することができ、以降記憶部53に登録された作業装置2の寸法情報を用いて、走行ルートL1の作成などの設定を行うことが可能となる。
また、本実施形態では、農作業支援システム100は、入力部52による入力内容、マップMP2、走行ルートL1、及び通知部51gの通知内容を表示する表示部(表示操作部)52を備える。これにより、入力部52による入力内容、マップMP2、走行ルートL1、及び通知部51gの通知U2、U3の内容を、ユーザに視認させることができ、利便性を一層向上させることが可能となる。
また、本実施形態では、農作業支援システム100は、農業機械1の位置を検出する位置検出部(測位装置)40と、ルート作成部51cにより作成された走行ルートL1を出力する出力部(通信部)54と、農業機械1の位置及び走行ルートL1に基づいて、農業機械1の走行又は操舵を自動で行いながら作業装置2を駆動して、圃場に対して農作業を行う自動制御部61と、を備え、自動制御部61は、走行ルートL1に基づく農作業を中断した後に再開する際に、位置検出部40により検出された農業機械1の位置と、出力部54により出力された走行ルートL1と、農作業の中断時に記憶部53に記録された中断データ70とに基づいて、農業機械1の走行又は操舵を自動で行いながら作業装置2を駆動する。
上記により、走行ルートL1に基づいて農業機械1の走行又は操舵を自動で行いながら作業装置2により農作業を行い、当該農作業の中断中に、作業装置2の寸法情報を更新することができる。また、当該農作業を再開する際に、作業装置2の寸法情報の更新が反映された走行ルートL1に基づいて、農業機械1の自動走行又は自動操舵を行いながら作業
装置2により農作業を行うことができるので、利便性を向上させることが可能となる。
また、本実施形態では、農業機械1は、入力部52による入力内容、マップMP2、走行ルートL1、通知部51gの通知内容を表示する表示部(表示操作部)52と、走行車体3の位置を検出する位置検出部40と、農業機械1の位置及び走行ルートL1に基づいて、農業機械1の走行又は操舵を自動で行いながら作業装置2を駆動して、圃場に対して農作業を行う自動制御部61と、を備え、表示部52は、走行ルートL1に基づく農作業の中断中に、再開する農作業の中断データ70を入力52部の入力操作により選択させるために、記憶部53に記録された中断データ70を表示し、自動制御部61は、走行ルートL1に基づく農作業を中断した後に再開する際に、位置検出部40により検出された走行車体3の位置と、ルート作成部51cにより再作成された走行ルートL1と、記憶部53に記録された中断データ70とに基づいて、走行車体3の走行又は操舵を自動で行いながら作業装置2を駆動する。
上記により、走行ルートL1に基づいて農業機械1の走行車体3の走行又は操舵を自動で行いながら作業装置2の駆動を自動で行う農作業において、ユーザは、当該農作業の中断中に作業装置2の寸法情報を更新し、当該更新が反映された走行ルートL1に基づいて農作業を再開することができる。また、ユーザは、異なる走行ルートL1に基づく農作業をそれぞれ中断しても、後で再開する農作業を選択することができる。さらに、農作業の中断中に作業装置2の寸法情報が更新された旨と、それにより走行ルートL1が中断時の走行ルートL1とは異なってしまう旨とを、当該農作業が再開される際にユーザに視認させることができる。
また、本実施形態では、農作業支援装置50は、入力部(表示操作部)52による入力内容、マップMP2、走行ルートL1、及び通知部51gの通知内容を表示する表示部(表示操作部)52と、ルート作成部51cにより作成された走行ルートL1を農業機械1へ出力する出力部(通信部)54と、を備え、表示部52は、走行ルートL1に基づく農作業の中断中に、再開する農作業の中断データ70を入力部52の入力操作により選択させるために、記憶部53に記録された中断データ70を表示する。これにより、ユーザは、異なる走行ルートL1に基づく農作業をそれぞれ中断しても、後で再開する農作業を選択することができる。
以上、本発明について説明したが、今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味及び範囲内でのすべての変更が含まれることが意図される。