以下、本発明の実施例を図面に基づいて説明する。なお、以下の図において、作業機の一例としてインパクト工具1を用いて説明するものとし、同一の部分には同一の符号を付して説明する。また、本明細書においては、前後左右、上下の方向は図中に示す方向であるとして説明する。
図1は本発明の実施例に係るインパクト工具1の縦断面図である。インパクト工具1は、図示しないビット等の先端工具を締結するもので作業機の一態様である。インパクト工具1は、充電可能な電池パック90を電源とし、モータ20を駆動源として回転打撃機構を駆動し、回転打撃機構によって回転部材の回転を回転方向の間欠的な打撃力に変換し、打撃機構部に連結されたアンビル55を駆動する。インパクト工具1のハウジングは、左右分割式のメインハウジング10と、メインハウジング10の前方側に接続されるハンマケース3と、メインハウジング10の後方側開口を覆うリヤカバー(後方ハウジング)17にて構成される。メインハウジング10は前後方向に延びる略円筒形の胴体部11と、胴体部11に側面視で略T字状を成すように連接されたハンドル部12と、ハンドル部12の下方に形成される電池パック取付部13を有する。本実施例のメインハウジング10は、円筒状の胴体部11の後方側に後側開口部15が形成され、後側開口部15がリヤカバー17の開口面18にて覆われるようにして閉鎖される。胴体部11の前側開口部には金属製のハンマケース3が接続される。ハンマケース3は左右分割式のメインハウジング10によって挟持されるようにして固定される。
ハンドル部12は胴体部11の中心軸線(回転軸線A1)と略直交するように下方に延在し、作業者が把持した際に人差し指が位置する箇所にはトリガレバー6aが設けられる。トリガレバー6aはモータのオン又はオフを制御するための起動スイッチ(トリガスイッチ6)の操作部である。トリガレバー6aの上方にはモータの回転方向を切り換えるための正逆切替レバー7が設けられる。ハンドル部12内の下部は、電池パック90を取り付けるために電池パック取付部13が形成される。電池パック取付部13はハンドル部12の長手方向中心軸から径方向(直交方向となる前方、後方、右方、左方)に広がるように形成された拡径部分である。電池パック取付部13の内部空間には、インパクト工具1の全体の制御を行うための制御回路基板9が設けられる。
制御回路基板9の表側及び裏側には。モータ20のオンオフ、回転方向、回転速度を制御するための各種の制御素子(図示せず)が搭載される。制御回路基板9の上面にはプッシュ式の第1スイッチ61(後述の図2参照)と第2スイッチ62が設けられる。第1スイッチ61(後述の図2参照)と第2スイッチ62は、ハンダ付けにより制御回路基板9に固定され、その周囲が操作パネル部60として構成される。操作パネル部60は、第1スイッチ61(後述の図2参照)及び第2スイッチ62と、それらの上面に配置されるスイッチ押圧面61a(後述の図3参照)、62aと、それらの周囲に配置されるスイッチホルダ64を含んで構成され、スイッチホルダ64の上面には保護シート63によってスイッチホルダ64の内部空間に水やほこりが入らないように密閉される。
電池パック90はリチウムイオン電池等の二次電池を複数本収容したもので、ラッチボタン91を押し込みながら前方に移動させることによってメインハウジング10から前方側に取り外しが可能である。図示していないが電池パック90には電圧チェック回路が搭載され、電池パック90の筐体の一部に複数セグメントのLED表示装置(図示せず)と、作業者によって操作されるチェックボタン(図示せず)が設けられる。作業者によってチェックボタンが操作されてONになると、数秒程度だけ電池残量に応じた数のLEDが点灯する。本実施例では電池パック90側に電圧チェック回路が設けられるので、インパクト工具1の本体側には電池の残量チェック機能は設けられていない。電池パック90が充電も放電もされていない時は、電池パック90のマイコンがスリープ状態に移行するが、電池パック90がインパクト工具1本体等の作業機本体に装着された後にトリガレバー6aが引かれると、マイコンはスリープ状態からアクティブ状態に移行する。また、電池パック90のチェックボタンを押すことでマイコンを起動させることができる。尚、本実施例のインパクト工具1の電源は任意であって、電池パック90を用いるだけで無くAC電源ケーブルを介して供給される商用電源を用いたものであっても良い。
分割形式のメインハウジング10は合成樹脂製であって、一方側(左側)には、ネジ止めするための複数のネジボス16a~16hが形成され、他方側(右側)にはネジ穴が形成される。左右のメインハウジング10は、前方側にハンマケース3を挟持する状態でネジ止めされ、その後に一体式のリヤカバー17がメインハウジング10に取りつけられる。リヤカバー17は、回転軸線A1に沿って後方側から前方側に移動させて、回転軸線A1と並行の方向に延びる2本の図示しないネジによってメインハウジング10にネジ止めされる。メインハウジング10の後側開口部15の右端近くと左端近くには図示しないネジを螺合させるための雌ねじが形成された2つのネジボス(図では見えない)が設けられる。また、リヤカバー17の右端近くと左端近くには図示しないネジを貫通させるための2つのネジ穴(図では見えない)が設けられる。
ハンマケース3は後端に開口部を有し、外周面の先端が絞り込まれた形状であって、先端に円筒状の貫通穴3aが形成され、貫通穴3aの内側にニードルベアリング等の軸受49が装着される。製造組み立て工程においては、ハンマケース3の後方側開口から内部に軸受49と、アンビル55を含む回転打撃機構50と、減速機構40等を組み込んで、内部に潤滑用のグリスを十分に充填した状態にて後方側の開口部をインナカバー44にて閉鎖する。ハンマケース3の前方側の貫通穴から前方側に露出するアンビル55には、図示しない先端工具を保持するための先端工具保持部35が設けられる。
胴体部11とリヤカバー17によって画定される空間の内部には、駆動源であるモータ20が収容される。モータ20の回転軸25は、前後方向に延在するように配置され、回転軸25の前方側にはモータ20の回転力を減速させる遊星歯車を用いた減速機構40と、減速機構40の出力による回転力を打撃力に変換して先端工具保持部35に伝達するための回転打撃機構50が回転軸線A1上に配置される。ブラシレス方式のモータ20は、図示しないインバータ回路を用いて駆動されるものであって、内側にてロータが回転して、外側には回転しないステータが配置される。ロータは回転軸25に固定されたロータコア23に永久磁石24を固定したものである。ステータは、メインハウジング10の胴体部11にて外周側が固定されたステータコア21に、コイル22を巻いたものである。ロータコア23に貫通する回転軸25は、前方側にて軸受27により軸支され、後方側には軸受28によって軸支される。軸受27はボールベアリングであり、インナカバー44によってその外輪が保持される。軸受28はボールベアリングであり、リヤカバー17の内壁側に形成された軸受ホルダ19にて保持される。
モータ20のうち、ステータ側の磁気形成回路となるステータコア21は完全にメインハウジング10の内部空間に収容される。モータ20の前側には半導体スイッチング素子、例えばホールIC31を搭載する略円形の回路基板30が設けられる。モータ20の回転軸25の後ろ側部分には冷却ファン33が設けられる。冷却ファン33は径方向外側に設けられた空気穴(図では見えない)から外気を吸引して、回転軸線A1方向前方側に流すことによりモータ20及び回路基板30に搭載される電子素子の冷却を行う。リヤカバー17の左右側面には、空気の吸入口たる風窓(図では見えない)が形成される。このように、メインハウジング10とリヤカバー17によってモータ20を収容する空間を画定するが、使用するモータ20の種類は任意であり、図1のようなブラシレスDCモータだけには限定されない。例えば、円筒形の金属ケースの内部に収容されるブラシ付きの直流モータをメインハウジング10に固定することが可能であり、その場合、リヤカバー17は、回転軸を軸支しない構成で良い。
減速機構40は、モータ20の出力を所定の減速比で減速してスピンドル46に伝達するものであり、ここでは遊星歯車を用いた機構である。減速機構40は、モータ20の回転軸25の先端に固定されるサンギヤ41と、サンギヤ41の外周側に距離を隔てて取り囲むように設けたリングギヤ43と、サンギヤ41とリングギヤ43の間の空間に配置され、これら双方のギヤに噛み合わされる複数のプラネタリーギヤ42を含んで構成される。リングギヤ43は、リング状部材の内周面にギヤが形成されるもので、インナカバー44を介してメインハウジング10に固定される。サンギヤ41は、減速機構40の入力部となる平歯車である。サンギヤ41の外周側ギヤ面と、リングギヤ43の内周側ギヤ面の間で、3つのプラネタリーギヤ42が、自転しながらサンギヤ41の回りを公転するで、遊星キャリヤの機能を有するスピンドル46が、所定の比率で減速された状態で回転する。
インナカバー44は合成樹脂の一体成形で製造される部品であって、メインハウジング10の胴体部11によって、左右方向から挟持されるようにして保持される。この際、インナカバー44がメインハウジング10に対して相対回転しないように保持される。インナカバー44の主な役割は、回転打撃機構に設けられる軸受27を保持すると共に、モータ20の前方側に形成された軸受45を保持して、軸方向の位置決めをする。インナカバー44によって保持される軸受45は、スピンドル46の後端を軸支するためであって、例えばボールベアリングが用いられる。
遊星キャリヤ部と一体に形成されるスピンドル46の外周面には、スピンドルカム溝が形成される。ハンマ51はスピンドル46の軸部の外周側に配置され、内周側にはハンマカム溝が形成される。ハンマ51は、スピンドルカム溝とハンマカム溝の内部を移動可能なカムボール47を用いたカム機構によって保持される。ハンマスプリング48は、前方側がハンマ51側に当接し、後方側はスピンドル46の遊星キャリヤ部に当接する。
アンビル55の後端には、被打撃部となる2つの羽根部56が周方向に180度隔てた位置に形成される。羽根部56は径方向外側に伸びるような形状であって、ハンマ51の打撃爪によって打撃される。スピンドル46とアンビル55の回転体は、前方側で軸受49によってハンマケース3の内壁により軸支される。尚、ハンマ51と羽根部56の形状は任意であり、羽根部56の周方向に2つではなく3つ、又はその他の数としても良い。
先端工具保持部35は、アンビル55の前側端部から軸方向後方に延びる断面形状が六角形の装着穴57と、周方向の2箇所に形成されスチールボール37を配置するための径方向に貫通する2つの穴部と、外周側に設けられるスリーブ36を含んで構成される。スリーブ36の内側には、スリーブ36を後方側に付勢するスプリング38が装着される。先端工具保持部35の下側には、図示しない先端工具の先端付近を照射するための照明装置34が設けられる。照明装置34としては、1つ又は複数のLED(発光ダイオード)が用いられ、照明装置34の前方側は光を透過する照射窓8が設けられる。照射窓8は合成樹脂のカバー部材であり、光を特定方向に向けるためのレンズを含むように構成しても良い。
モータ20の回転駆動力は、回転軸25から遊星歯車を用いた減速機構40を介して回転打撃機構50側に伝達される。減速機構40はモータ20の出力をスピンドル46に伝達するものであり、プラネタリーギヤ42の公転運動が遊星キャリヤ部の回転運動に変換され、スピンドル46が回転する。スピンドル46が回転するとそれに伴ってハンマ51が回転し、アンビル55を回転させる。ハンマ51からアンビル55に加わる負荷が小さいうちは、ハンマ51はスピンドル46とほぼ連動するように回転する。先端工具から受ける反力が大きくなると、カムボール47が移動することによって、ハンマ51とスピンドル46の回転方向の相対位置が僅かに変動して、ハンマ51とスピンドル46の回転方向の相対位置が僅かに変動し、ハンマ51が後退する。ハンマ51の後方側への移動はハンマスプリング48を圧縮しながらの移動となる。
ハンマ51の後退動によって、ハンマ51の打撃爪がアンビル55の羽根部56を乗り越えて両者の係合が解除される。すると、ハンマ51は、スピンドル46の回転力に加えて、ハンマスプリング48に蓄積された弾性エネルギーとカム機構の作用とによって回転方向及び前方に急速に加速されつつ、ハンマスプリング48の付勢力によって前方、すなわちアンビル55側へと移動され、ハンマ51の打撃爪がアンビル55の羽根部56に再び係合して一体的に回転し始める。このとき、強力な回転打撃力がアンビル55に加えられるため、アンビル55に装着された図示しない先端工具に回転打撃力を伝達する。以後、同様の動作が繰り返されてネジ等を締め付ける。
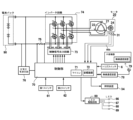
図2は本実施例のインパクト工具1のモータ20の駆動制御系の回路図である。インパクト工具1は、着脱可能に装着される電池パック90の電力を用いて放電負荷たるモータ20を駆動する。モータ20の回転制御は制御部70によって行われる。この回路図で示すインバータ回路74、定電圧電源回路76、制御部70は同一の制御回路基板9(図1参照)に搭載される。電池パック90の出力はインバータ回路74に入力される。インバータ回路74は6つのスイッチング素子Q1~Q6を含んで構成され、制御部70からの指示によって制御信号出力回路73から供給されるゲート信号H1~H6によってスイッチング動作が制御される。インバータ回路74の6個のスイッチング素子Q1~Q6は3相ブリッジ形式に接続される。スイッチング素子Q1~Q6は、MOSFET(Metal Oxide Semiconductor Field Effect Transistor)を用いているが、IGBT(Insulated Gate Bipolar Transistor)を用いても良い。
インバータ回路74の6個のスイッチング素子Q1~Q6の各ドレイン又は各ソースは、デルタ接続されたコイル22のU相、V相、W相に接続される。スイッチング素子Q1~Q3のドレイン端子が電池パック90の正極側に共通に接続されている。一方、スイッチング素子Q4~Q6のドレイン端子はモータのV相、U相、W相の端子にそれぞれ接続される。モータ20のステータコア21の内側では、永久磁石24を有するロータが回転する。ロータに装着される永久磁石24の位置を回転位置検出素子たる3つのホールIC31にて検出することにより制御部70はモータ20の回転位置を検出することができる。
制御部70は、モータのオンオフ及び回転制御を行うための制御手段であって、マイコン71を含んで構成される。制御部70は、モータ20のオンオフ用のトリガスイッチ6の操作に伴って入力される起動信号と、駆動モード切り替えボタン(第1スイッチ61)によって設定された駆動モードに基づき、モータ20の回転速度を制御し、コイルU、V、Wへの通電時間と駆動電圧を制御する。制御部70のマイコンは、インバータ回路74の6個のスイッチング素子Q1~Q6の各ゲートに出力される駆動信号H1~H6を制御するための指示信号を制御信号出力回路73に出力する。第2スイッチ62は、照明装置34(図1参照)の点灯用のスイッチである。第2スイッチ62を押す毎に、“連続点灯”状態、トリガスイッチ6と連動して点灯させる“SW連動”状態、“OFF”状態の3つの状態が順次切り替わる。第1スイッチ61が本発明における第1の操作部または、駆動モード選択部に該当し、第2スイッチ62が本発明における第2の操作部に該当する。
スイッチング素子Q1~Q6は、制御信号出力回路73から入力される駆動信号H1~H6に基づきスイッチング動作を行い、電池パック90から供給された直流電圧を、3相(U相、V相、W相)電圧Vu、Vv、Vwとして、モータ20に供給する。モータ20に供給される電流の大きさは、電池パック90とインバータ回路74との間に接続されたシャント抵抗75の両端の電圧値を検出することにより制御部70によって検出される。制御部70には、モータ20の設定回転に応じた所定の電流閾値が予め設定されており、検出した電流値が閾値を超えると、モータ20の駆動を停止すべく、インバータ回路74のスイッチング動作を停止させる。これにより、過電流がモータ20に流れることによる焼損等の発生が防止される。
定電圧電源回路76は、電池パック90の出力側に直接接続され、マイコン等により構成される制御部70への安定化した基準電圧(低電圧)の直流を供給するための電源回路である。定電圧電源回路76は、ダイオード、平滑用の電解コンデンサ、IPD回路、レギュレータ等を含んで構成される。制御部70にはLED駆動回路80が接続される。LED駆動回路80は4つのLED(発光ダイオード)66~69を独立して制御するための回路である。ここでは図示していないが、LED駆動回路80には定電圧電源回路76からの電力が供給され、マイコン71の指示に従ってLED66~69の点灯/消灯の状態、点灯時の明るさとその発光色、発光形態を制御する。本実施例は、LED66~69として単色表示のLEDでも実現できるが、2色以上表示なマルチカラーLEDを用いると良い。
制御部70には無線通信装置78が接続される。無線通信装置78は外部の情報端末や作業機等と単方向又は双方向通信が可能とするもので、無線通信装置78にはアンテナ79に接続される。無線通信装置78は、数m~数十m程度の近距離通信を可能とするもので、例えばBluetooth(ブルートゥース:BluetoothSIG,Inc.USAの登録商標)を用いることができる。近接無線通信を用いて、外部の情報端末、例えば図示しないスマートフォンから記憶装置72に格納された情報の読み書きが可能となる。
図3は図1の操作パネル部60の上面図である。メインハウジング10は、胴体部11から電池パック取付部13にかけてすべてが、右側と左側に2分割されるように形成され、分割面をまたぐように開口部14(図1参照)が形成され、開口部14に操作パネル部60が設けられる。開口部14はメインハウジング10の左右分割面(鉛直となる面)と交差し、分割面を跨ぐように左右に延びる形状とされる。操作パネル部60は、左右方向に長辺を有する略長方形であって、第1スイッチ61、第2スイッチ62のボタン部分(61a、62a)と、LED(66~69)部分の上面を含む全体を覆うように保護シート63が貼りつけられる。操作パネル部60の上面部の外縁は、開口部14によって隙間がほぼないように挟持される。
操作パネル部60の左右方向には、2つのスイッチ押圧面61a、62bが形成される。スイッチ押圧面61a、62bは上下方向に僅かに移動可能であり、それを押すことにより後述するスイッチの操作が行われる。スイッチ押圧面61a、62bの裏側(図1で見たら下側)には、第1スイッチ61と第2スイッチ62(共に図2参照)が配置される。第1スイッチ61は、インパクト工具1の“駆動モード”を設定するためのプッシュ式のスイッチである。“駆動モード”は、本実施例のインパクト工具1では、出力を抑えた“ソフトモード”、出力を高めた“パワーモード”、ボルトの締め付けに適したモータの駆動を行う“ボルトモード”、テクスねじの締め付けに適したモータの駆動を行う“テクスモード”の4つが予め設けられる。
保護シート63には、上下方向に並ぶようにして4つのLED表示窓64a~64dが設けられ、その右側にはLED表示窓64a~64dを介する点灯状態が示す“駆動モード”の名称が表示される。LED表示窓64a~64dは、保護シート63に形成された光を透過させる半透明部分であり、それらの裏側(図1でみたら下側)には、4つのLED66~69(図2参照)が配置される。ここでは、インパクト工具1の“駆動モード”として、ソフトモード66a、パワーモード67a、ボルトモード68a、テクスモード69aの4つが設けられ、選択された“駆動モード”に対応するLED66~69のいずれか一つが点灯し、対応する表示窓64a~64dから光が透過するので、作業者はどの“駆動モード”が設定されているのかを容易に視認できる。
図4は本実施例のインパクト工具1における駆動モードの遷移図である。図3にて前述したように、第1スイッチ61を1回押す毎に、インパクト工具1の駆動モードが、“ソフトモード”→“パワーモード”→“ボルトモード”→“テクスモード”→“ソフトモード”…(以下同様)、と順に切り替わる。この第1スイッチ61の1回押しが、「駆動モードの切り替え操作」である。制御部70のマイコン71は、設定された駆動モードの制御方法に沿ってモータ20の回転駆動を行うもので、その際のモータ20の駆動特性を規定するパラメータは、制御部70に含まれる記憶装置72に予め格納されている。記憶装置72には、これらパラメータに加えてマイコン71によって管理される各種データの履歴情報が格納される。このパラメータは、無線通信装置を用いた外部機器の操作により変更が可能である。なお、「駆動モードの切り替え操作」が本発明における第1所定操作又は第2の選択動作に該当する。
トリガレバー6aが引かれるとマイコン71には、オンオフ信号(High又はLow)と、トリガレバー6aの引き量(ストローク)に応じた電気信号が入力される。マイコン71はそれらの信号と、設定された駆動モードに応じたパラメータを用いて、モータ20の回転制御用のプログラムを実行することで、インバータ回路74を制御する。
従来のインパクト工具1においては、これらのパラメータは駆動モード毎に固定であって、これらの内容を作業者が変更することはできなかった。そのため、作業者による変更可能な駆動モード数を増やすためには、切り替えできる段階を増やすようにし、例えば、ソフトモードとパワーモードによる2種類の駆動モードを、ソフトモード、ミドルモード、パワーモードのようにさら多い種類の駆動モードとして製品設計をする必要があった。一方、駆動モードを増大させると、第1スイッチ61を押さねばならない回数が増えるため、操作性が悪化する。そこで本実施例では、第1スイッチ61を1回押す毎に切り替わるモードの総数を4つのまま一定としながら、駆動モード群のグループを複数割り当て、丸1~丸3の3つのグループの特性を切り替えできるようにした。この切り替えは、第1スイッチ61の長押し操作、例えば第1スイッチ61の押した状態を5秒以上維持することによって行う。この長押し操作による切り替えが、「グループ切り替え操作」である。なお、この長押し操作又は後述する外部機器を使用した「グループ切り替え操作」が、本発明における第1の選択動作に該当する。
インパクト工具1のデフォルト状態としては、丸1のグループの特性が予め設定される。丸1のグループの特性は変更不能であって、グループ切り替えのリセット操作を行うといずれのグループに設定されている時であっても丸1のグループの設定に戻るようにした。丸1のグループで設定される駆動モードの特性は、従来のインパクト工具と同様の設定とすれば良い。本実施例のインパクト工具1では、さらに丸2のグループで設定される駆動モード群と、さらに丸3のグループで設定される駆動モード群が予め設定されている。これら丸2と丸3のグループは、工場出荷時に予め設定されているもので、丸1~丸3のグループにおける同一駆動モードの制御特性がそれぞれ異なる。作業者は、第1スイッチ61の長押し操作によって、グループ全体として、第1グループ(特性1)→第2グループ(特性2)→第3グループ(特性3)のように切り替えることができる。このように第1グループ、第2グループ、第3グループを切り替える操作は、専用の切り替えボタンを追加することによっても実現可能である。しかしながら、インパクト工具1のような作業機においては新たにボタンを追加することはスペース上の制約から難しい場合が多い。そこで、本実施例では第1スイッチ61の操作態様を変えることでグループ切り替え操作が可能なように構成した。尚、「グループ切り替え操作」は、例えば、第1スイッチ61の長押しする操作だけでなく、第1スイッチ61と第2スイッチ62の同時押しによって実現するようにしても良い。また、インパクト工具1以外の作業機においては、正逆スイッチ、電池パックの残量表示スイッチ、速度切り替えダイヤル等、様々な操作部が設けられる場合があるので、それらと第1スイッチ61又は第2スイッチ62を利用して「グループ切り替え操作」を実現可能としても良い。これにより、「駆動モードの切り替え操作」と「グループ切り替え操作」を操作する操作部の組み合わせを変えることで、作業者の意図せぬ駆動モードの変更を抑制することが可能である。
第1スイッチ61と第2スイッチ62の同時押しすることにより、矢印に示すように第1グループ、第2グループ、第3グループが順に切り替わり、第3グループの設定時に第1スイッチ61の長押しをすると再び第1グループに戻る。このように、作業機(インパクト工具1)の本体側で所定の操作(第1スイッチの長押し)を行うことで、作業機本体に予め記憶された第1~3のグループ設定を任意に呼び出すことができる。
ここではデフォルト特性として、グループ1にてソフトモード丸1、パワーモード丸1、ボルトモード丸1、テクスモード丸1が設定され、グループ2にてソフトモード丸2、パワーモード丸2、ボルトモード丸2、テクスモード丸2が設定され、グループ3にてソフトモード丸3、パワーモード丸3、ボルトモード丸3、テクスモード丸3が設定されている。グループ1~3間における同一駆動モードの制御の違いは、前記モータの最大回転数、最小回転数、加速カーブの傾き、最高回転数到達までの時間の少なくとも一つの制御特性が違うもので、作業対象に応じて設定される。このような駆動モード群を複数のグループに分けて、グループ単位で駆動特性を切り替え可能とする具体的な例を図5及び図6を用いて説明する。
図5は本実施例のインパクト工具1におけるトリガ引き量とモータ回転数の関係を示す図である。例えば、予め登録されたグループ1では、トリガ引き量に対して駆動特性101、駆動特性102、駆動特性103に示すような3つの駆動モードA~Cが実行されるとする。この際、駆動特性101、駆動特性102はトリガレバー6aを引き量S1まで引いた時点でモータ20が起動され、矢印101a、102aのようにトリガレバー6aを引き量にほぼ比例して上昇し、引き量がS7を越えた付近、即ち最大引き量Smaxの半分程度で設定最高回転数Nmax、N3にそれぞれ到達する。駆動特性103はトリガレバー6aを引き量S2(>S1)まで引いた時点で遅れてモータ20が起動され、矢印103aのようにゆっくりと上昇し、引き量がS7を越えた付近で設定最高回転数N1に到達する。これらの駆動特性101~103はデフォルト特性として従来のインパクト工具1において設定されていたような駆動特性であって、本実施例のグループ1で規定される駆動特性である。
駆動特性111~113は、予め登録されたグループ2として設定される制御特性である。図4にて示したように、グループ1からグループ2に変更されると、駆動特性101~103から駆動特性111~113に一括して切り替えられる。駆動特性111、112は、トリガレバー6aが引き量S3、S4(S4>S3>S2>S1)まで引いた時点で遅れてモータ20が起動される。このような駆動状態では、トリガレバー6aを調整しながら低速回転領域で先端工具を駆動したいような作業において、特に使いやすい制御モードとなる。一方、高速にて迅速に作業を行いたい場合、例えば木ねじを高速で締めつけを行いたいような作業の場合は、駆動特性111、112は好ましくない。駆動特性113はトリガレバー6aを引き量S7まで引いた時点で初めてモータ20が起動されるように立ち上がり遅延時間を設ける。モータ20が起動したら、矢印113aのようにきわめてゆっくりとモータ20の回転数が上昇し、引き量がSmaxに到達した付近で一番低い設定回転数N0に到達する。引き量S1~S7が本発明における操作量に該当する。
以上説明したように、本実施例においては、本実施例において第1グループとして規定される駆動特性101~103から、第2グループとして規定される駆動特性111~113に切り替えることできるので、作業者は作業内容に応じて第1グループか第2グループの何れかを選択することができる。尚、第1グループと異なるグループの総数を2つ(第1グループ及び第2グループ)だけではなくて、さらに1つ追加して、第3グループとして駆動特性121~123を設けても良い。第3グループの駆動特性121~123は、第1グループの駆動特性101~103と第2グループの駆動特性111~113の中間程度の特性としている。図5の駆動特性の例では、それぞれ3つの駆動モードを持つ第1グループ~第3グループの駆動特性を説明したが、図3で示したように本実施例のインパクト工具1では第1グループ~第3グループにはそれぞれ4つの駆動モードが含まれるので、インパクト工具1では各グループにて4つの駆動特性を設定して、セットで切り替えを行うことが可能となる。
図6は本実施例のインパクト工具1におけるトリガ引き量とモータ回転数の関係を示す図である。制御部70のマイコン71は、トリガレバー6aを引くことで変化するトリガスイッチ6の可変抵抗値を元に調整するものであり、電気的に判断して行なわれる。この制御によって、作業者にとっては、トリガレバー6aを最大操作量引いた場合に、モータ20が設定された回転数に達するまでの時間が変わることになる。図6では、第1グループとして規定される駆動特性131~133と、第2グループとして規定される駆動特性141~143を示している。駆動特性131~133間における制御の違いは、最高回転数である。駆動特性131の最高回転速度が大きく、駆動特性133の最高回転速度が小さく、駆動特性132は駆動特性131と駆動特性133の間くらいの最高回転数である。駆動特性131~133の加速特性は、矢印131a~133aに示すように、最高回転数に応じてほぼ同様の傾きとなるように制御され、矢印131b~133bで示す最高回転数に到達するまでの到達時間がAT1でほぼ同様になる。
第2グループとして規定される駆動特性141~143は、第1グループとして規定される駆動特性131~133に比べてそれぞれの最高回転数が低い上に、トリガレバー6aを引き始めたときの反応を鈍くし、矢印141a、142aのようにモータ20が矢印141b、142bに至るまでの到達時間がAT2となるようにした(但し、AT2>AT1)。駆動特性143では、矢印143bに至るまでの到達時間がAT2よりも更に遅くなるように設定される。このように第2グループではモータ20の速度の立ち上がり遅延時間を大きくするようにしたので、遅延時間が大きい方を好むような作業者にとっては第2グループの駆動特性が使いやすいものとなる。尚、図6では時刻t1付近にてトリガレバー6aがいっぱいに引かれた場合の特性を示しているが、トリガレバー6aが引き量の100%に到達しない程度の操作の場合は、図6に示す最高回転数、到達時間よりも低いものになる。
図7は本実施例のインパクト工具1における駆動モードの切り替え手順を示すフローチャートである。図7に示す一連の手順は、記憶装置72(図2参照)にあらかじめ格納されたプログラムをマイコン71(図2参照)が実行することによりソフトウェア的に実現される。また、図7のフローチャートに示す一連の手順は、マイコン71により実行されるモータ20の回転制御プログラム(メインのプログラム)とは並行して実行される補助的なプログラムであり、マイコン71が起動している間は継続して実行される。
最初にマイコン71は、操作パネル部60(図3参照)の第1スイッチ61が押されているか否かを判定する(ステップ161)。ここで、第1スイッチ61が押されているときは、マイコン71は次に第2スイッチ62が押されているか否かを判定する(ステップ162)。ステップ162において第2スイッチ62が押されていない場合は、直前まで第1スイッチ61が同時押しされていたか否かを判定する(ステップ168)。ステップ168にて、同時押しされていない場合は第1スイッチ61の単独操作であるので、図4で示した第1スイッチ61の操作として、駆動モード切り替え(変更)を行い(ステップ169)、ステップ171に移行する。ステップ168にて、同時押しされていた場合はステップ166に進む。
ステップ162において第2スイッチ62が押されていた場合は、第1スイッチ61と第2スイッチ62の同時押しに該当するので、マイコン71は同時押しであるとして検知し(ステップ163)、マイコン71は同時押しがされている時間のカウントアップを開始し(ステップ164)、ステップ161に戻る。
ステップ161において第1スイッチ61が押されていない場合は、マイコン71は直前まで第1スイッチ61と第2スイッチ62が同時に押されていたか否かを判定する(ステップ165)。ここで直前に同時に押されていた場合は、図4で示したようにグループの切り替え操作、又は、リセット操作の何れかであるのでステップ166に進む。ステップ166では第1スイッチ61と第2スイッチの長押し時間が所定時間、例えば5秒以上であるか否かを判定し、所定時間以上の場合はリセット操作として、設定されているグループを、初期状態(デフォルト状態)である第1グループに切り替え(ステップ167)、同時押し検知モードをクリアして(ステップ171)、ステップ161に戻る。ステップ166では第1スイッチ61と第2スイッチの長押し時間が所定時間未満の場合は、リセット操作ではないので駆動モードの切り替えを行い(ステップ170)、同時押し検知モードをクリアして(ステップ171)、ステップ161に戻る。
ステップ165で、第1スイッチ61と第2スイッチ62が同時に押されていない場合は、グループの切り替えではないので、第2スイッチ62が押されているか否かを判定する(ステップ172)。第2スイッチ62は、照明装置34の点灯スイッチであるので、ステップ172にて第2スイッチ62が押された場合は、点灯モードの切り替えを行う(ステップ173)。第2スイッチ62はが押下されると、押下されるごとに、連続点灯→SW連動点灯→消灯→連続点灯→・・・と順に切り替わる。ステップ172にて第2スイッチ62が操作されていない場合は、同時押し検知モードをクリアして(ステップ171)、ステップ161に戻る。
以上のフローチャートの制御によって、第1スイッチ61と第2スイッチ62を用いることによって、グループの切り替え操作(ステップ170)と、制御特性丸1~丸3(図4参照)の切り替え操作(ステップ169)を行うことができる。
ステップ167のリセット操作の際と、ステップ170のグループの切り替えが行われたときには、作業者に対して切り替わったことを示すために、LED66~69(図2参照)を用いて切り替えが行われたことを示すと良い。例えば、LED66~69として多色表示が可能なLEDを用いて、第1スイッチ61と第2スイッチ62の同時押しをしたら、切り替え後の特性を、デフォルトのLED66~69(例えば赤)とは異なる、別の色(例えば青)にて表示するようにすると良い。また、切り替え後の特性が第1グループの場合はLED66だけ1つ点灯し、第2グループの場合はLED66と67の2つが点灯し、第3グループの場合はLED66~68の3つが点灯するように構成しても良い。
これらの点灯は、所定時間(例えば3秒)だけ表示してから消灯するようにすれば良い。また、第1スイッチ61と第2スイッチ62の所定時間以上の同時押しをしたら、リセット操作が行われたとして、LED66~69を青色にて所定時間だけ点滅させた後に、第1グループに戻ったとしてLED66の1つだけを青色にて3秒程度点灯させるようにすれば良い。なお、グループの切り替え操作、および、リセット操作が行われたことを、照明装置34を所定時間点灯させることや点滅させることで報知しても良い。照明装置34が本発明における報知部に該当する。駆動モード切替操作では起動することのない報知部により、グループの切り替え操作、および、リセット操作が行われたことを報知することで、グループの切り替え、および、リセットが行われたことを作業者に確実に報知することが可能となる。
以上、本発明の作業機によれば、図4で示したように駆動モード群のグループを複数割り当て、丸1~丸3の3つのグループの特性を切り替えできるようにしたので、多彩な駆動モードを設定することができる。また、第2グループと第3グループを作業者が外部の接続機器(例えばスマートフォン等の除法端末)から書き換え可能に構成すれば、作業者の好みに合わせた駆動特性を容易に実現することが可能となる。さらに、第2グループと第3グループのように切り替えできるグループ群があって、使用中の作業者がどのグループを適用しているかどうかわからなくなった場合でも、第1スイッチ61と第2スイッチ62の同時長押しによるリセット操作が可能となるので、使い勝手の良い作業機を実現できた。
以上、本発明を実施例に基づいて説明したが、本発明は上述の実施例に限定されるものではなく、その趣旨を逸脱しない範囲内で種々の変更が可能である。例えば、上述の実施例では作業機の例としてインパクト工具1で説明したが、切り替え可能な複数の駆動モードを有する作業機や、トリガスイッチ等の可変スイッチとモータを有する作業機であれば、インパクト工具以外の電動工具や、作業用の電気機器にも同様に適用できる。さらに、作業機の電源は、電池パックを用いるものだけに限られずに、商用電源を用いるものであっても良い。