JP7541660B2 - 自律移動装置、学習装置、異常検知方法、及びプログラム - Google Patents
自律移動装置、学習装置、異常検知方法、及びプログラム Download PDFInfo
- Publication number
- JP7541660B2 JP7541660B2 JP2020000463A JP2020000463A JP7541660B2 JP 7541660 B2 JP7541660 B2 JP 7541660B2 JP 2020000463 A JP2020000463 A JP 2020000463A JP 2020000463 A JP2020000463 A JP 2020000463A JP 7541660 B2 JP7541660 B2 JP 7541660B2
- Authority
- JP
- Japan
- Prior art keywords
- autonomous mobile
- mobile device
- accumulated
- current
- data
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



























Landscapes
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Description
図1を参照しながら、実施形態1に係る自律移動装置について説明する。図1は、実施形態1に係る自律移動装置の一構成例を示すブロック図である。
センサ群1bは、自律移動装置1における現在の状態を検知する。ここで、現在の状態とは、センサ群1bに含まれるセンサそれぞれについて、設置箇所における検知対象を計測した結果のセンサ値、或いはそのセンサ値が示す状態を指すことができ、主に移動状態(運行状態)が含まれる。上記移動状態は、自律移動装置1の傾きや位置などを含むことができる。なお、上記設置箇所や上記検知対象は、一般的に自律移動装置1の種別や形状によって異なることになる。
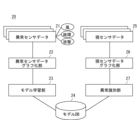
実施形態2について、図5~図13を参照しながら、実施形態1との相違点を中心に説明するが、実施形態1で説明した様々な例が適用できる。図5は、実施形態2に係る自律移動装置の一構成例を示すブロック図である。図6は、図5における正常センサデータの一例を示す図、図7は、図5における正常センサデータグラフ化部の出力例を示す図である。図8は、図5における現センサデータの一例を示す図、図9は、図5における現センサデータグラフ化部の出力例を示す図、図10は、図9の出力例を出力するために用意するデータの一例を示す図である。
実施形態3について、図14~図18を参照しながら、その効果も含めた実施形態2との相違点を中心に説明する。実施形態3は、実施形態1,2で説明した様々な例が適宜利用できる。図14は、実施形態3に係る自律移動装置の一構成例を示すブロック図である。
実施形態4について、図19~図20を参照しながら、その効果も含めた実施形態2,3との相違点を中心に説明する。実施形態4は、実施形態1~3で説明した様々な例が適宜利用できる。図19は、実施形態4に係る自律移動装置の一構成例を示すブロック図である。
実施形態5について、図21~図27を参照しながら、その効果も含めた実施形態4との相違点を中心に説明する。実施形態5は、実施形態1~4で説明した様々な例が適宜利用できる。図23は、実施形態5に係る自律移動装置の一構成例を示すブロック図である。
実施形態6について、その効果も含めた実施形態2~5との相違点を中心に説明する。実施形態6は、実施形態1~5で説明した様々な例が適宜利用できる。
[a]
各実施形態において、自律移動装置の機能、学習装置の機能、サーバ装置の機能などについて説明したが、各装置は、例示した構成例に限ったものではなく、各装置としてこれらの機能が実現できればよい。
各実施形態に係る各装置は、次のようなハードウェア構成を有していてもよい。図28は、装置のハードウェア構成の一例を示す図である。なお、上記他の実施形態[a]についても同様である。
さらに、上述した各実施形態において、自律移動装置における処理の手順を例示したように、本開示は、自律移動装置における異常検知方法としての形態も採り得る。この異常検知方法は、次の検知ステップ及び制御ステップを備えることができる。上記検知ステップは、自律移動装置における現在の状態をその自律移動装置内のセンサ群で検知する。上記制御ステップは、その自律移動装置における異常発生状態を検知又は予測した結果を得る。上記制御ステップは、センサ群で検知された検知開始時点から現時点までの時系列データである現センサデータを取得する。上記制御ステップは、現センサデータを第1所定間隔毎に分割した現分割データと現センサデータとに基づき生成された複数のグラフである現グラフ群を、学習済みモデルに入力し、上記結果を得る。学習済みモデルは、その自律移動装置及び他の同種の自律移動装置の少なくとも1つにおける状態について装置内部のセンサ群で検知した時系列データ(蓄積センサデータ)についての蓄積グラフ群を、未学習モデルに入力して機械学習を行うことで構築される。蓄積グラフ群は、蓄積センサデータを第2所定間隔毎に分割した、蓄積分割データと蓄積センサデータとに基づき生成された複数のグラフである。なお、その他の例については、上述した各実施形態で説明した通りである。
<付記>
自律移動装置における現在の状態を検知するセンサ群と、
制御部と、
を備え、
前記制御部は、
前記センサ群で検知された検知開始時点から現時点までの時系列データである現センサデータを取得し、
前記現センサデータを第1所定間隔毎に分割した現分割データと前記現センサデータとに基づき生成された複数のグラフである現グラフ群を、学習済みモデルに入力し、前記自律移動装置における異常発生状態を検知又は予測した結果を得、
前記学習済みモデルは、前記自律移動装置及び他の同種の自律移動装置の少なくとも1つにおける状態について装置内部のセンサ群で検知した時系列データである蓄積センサデータについて、前記蓄積センサデータを第2所定間隔毎に分割した蓄積分割データと前記蓄積センサデータとに基づき生成された複数のグラフである蓄積グラフ群を、未学習モデルに入力して機械学習を行うことで構築された学習モデルである、
自律移動装置。
Nを1以上の整数、iを1からNまでの整数、Mを1以上の整数、jを1からMまでの整数とし、
前記学習済みモデルに入力される前記現グラフ群は、検知開始時点から前記第1所定間隔がi回分経過するまでの合計N個の期間のそれぞれについて、対応するi個の前記現分割データを示すように生成された、N個のグラフを有し、
前記未学習モデルに入力される前記蓄積グラフ群は、検知開始時点から前記第2所定間隔がj回分経過するまでの合計M個の期間のそれぞれについて、対応するj個の前記現分割データを示すように生成された、M個のグラフを有する、
付記1に記載の自律移動装置。
前記蓄積センサデータは、前記自律移動装置及び前記他の同種の自律移動装置の少なくとも1つにおける正常時の状態を、各装置内部のセンサ群で検知した時系列データである正常センサデータを含む、
付記1又は2に記載の自律移動装置。
前記蓄積センサデータは、前記自律移動装置及び前記他の同種の自律移動装置の少なくとも1つにおける異常時の状態を、各装置内部のセンサ群で検知した時系列データである異常センサデータを含む、
付記1~3のいずれか1項に記載の自律移動装置。
前記制御部は、
前記機械学習のアルゴリズム及び前記機械学習に用いた蓄積センサデータのうちの少なくとも一方が異なる複数の前記学習済みモデルの中から、使用する学習済みモデルを選択し、
選択した学習済みモデルである選択モデルを使用して、前記結果を得る、
付記1~4のいずれか1項に記載の自律移動装置。
前記制御部は、前記選択モデルとして最も事前に検知できる学習済みモデルを含むように選択する、
付記5に記載の自律移動装置。
前記制御部は、前記結果として、正常時の状態、異常時の予兆がある状態、及び異常時の状態を含む、複数の状態のうち1つを得る、
付記1~6のいずれか1項に記載の自律移動装置。
前記制御部は、異常時の状態を示す前記結果として、複数の異常要因のうち少なくとも1つを得る、
付記4に記載の自律移動装置。
前記学習済みモデルを記憶する記憶部をさらに備え、
前記制御部は、前記現センサデータを取得し、取得した前記現センサデータから前記現グラフ群を生成する、
付記1~8のいずれか1項に記載の自律移動装置。
前記蓄積センサデータは、前記自律移動装置及び他の同種の自律移動装置の少なくとも1つにおける動作状況についての時系列データと、前記自律移動装置及び他の同種の自律移動装置の少なくとも1つにおける運行管理を行う側に報告する現在の位置についての時系列データと、を含む、
付記1~9のいずれか1項に記載の自律移動装置。
前記制御部は、前記学習済みモデルを生成する学習部を備え、
前記学習部は、
前記蓄積センサデータを取得し、
前記蓄積センサデータを前記第1所定間隔毎に分割して前記蓄積分割データを生成し、
前記蓄積分割データと前記蓄積センサデータとに基づき、前記蓄積グラフ群を生成し、
前記蓄積グラフ群を予め記憶された未学習モデルに入力して機械学習を行うことで、前記自律移動装置における異常発生状態を検知又は予測した結果を得るための前記学習済みモデルを生成する、
付記1~10のいずれか1項に記載の自律移動装置。
前記学習済みモデルを記憶する記憶部と、
通信部と、
をさらに備え、
前記制御部は、前記現センサデータを取得し、前記通信部を介し、取得した前記現センサデータ又は前記現分割データをサーバ装置に送信して前記サーバ装置から前記現グラフ群を受信する、
付記1~10のいずれか1項に記載の自律移動装置。
通信部をさらに備え、
前記制御部は、前記現センサデータを取得し、前記通信部を介して、取得した前記現センサデータ又は前記現分割データをサーバ装置に送信して前記サーバ装置から前記結果を受信する、
付記1~10のいずれか1項に記載の自律移動装置。
付記13に記載の自律移動装置と通信するサーバ側通信部と、
前記学習済みモデルを記憶するモデル記憶部と、
前記サーバ側通信部を介して前記自律移動装置から前記現センサデータ又は前記現分割データを受信し、前記モデル記憶部に記憶された前記学習済みモデルを用いて前記結果を得、前記サーバ側通信部を介して前記自律移動装置に前記結果を送信するサーバ側制御部と、
を備えたサーバ装置。
付記13に記載の自律移動装置と、
サーバ装置と、
を備え、
前記サーバ装置は、
前記自律移動装置と通信するサーバ側通信部と、
前記学習済みモデルを記憶するモデル記憶部と、
前記サーバ側通信部を介して前記自律移動装置から前記現センサデータ又は前記現分割データを受信し、前記モデル記憶部に記憶された前記学習済みモデルを用いて前記結果を得、前記サーバ側通信部を介して前記自律移動装置に前記結果を送信するサーバ側制御部と、
を備えた、
自律移動システム。
自律移動装置における現在の状態を検知するセンサ群を備えた自律移動装置と通信する学習装置側通信部と、
学習装置側記憶部と、
学習装置側制御部と、
を備え、
前記学習装置側制御部は、
前記学習装置側通信部を介して前記自律移動装置から、前記センサ群で検知された検知開始時点から検知終了時点までの時系列データである蓄積センサデータ又は前記蓄積センサデータを第1所定間隔毎に分割した蓄積分割データを受信して、前記学習装置側記憶部に記憶し、
前記蓄積分割データと前記蓄積センサデータとに基づき、複数のグラフである蓄積グラフ群を生成し、
前記蓄積グラフ群を前記学習装置側記憶部に予め記憶された未学習モデルに入力して機械学習を行うことで、前記自律移動装置における異常発生状態を検知又は予測した結果を得るための学習済みモデルを生成する、
学習装置。
自律移動装置における現在の状態を前記自律移動装置内のセンサ群で検知する検知ステップと、
前記自律移動装置における異常発生状態を検知又は予測した結果を得る制御ステップと、
を備え、
前記制御ステップは、
前記センサ群で検知された検知開始時点から現時点までの時系列データである現センサデータを取得し、
前記現センサデータを第1所定間隔毎に分割した現分割データと前記現センサデータとに基づき生成された複数のグラフである現グラフ群を、学習済みモデルに入力し、前記結果を得、
前記学習済みモデルは、前記自律移動装置及び他の同種の自律移動装置の少なくとも1つにおける状態について装置内部のセンサ群で検知した時系列データである蓄積センサデータについて、前記蓄積センサデータを第2所定間隔毎に分割した蓄積分割データと前記蓄積センサデータとに基づき生成された複数のグラフである蓄積グラフ群を、未学習モデルに入力して機械学習を行うことで構築された学習モデルである、
異常検知方法。
自律移動装置のコンピュータに、
前記自律移動装置における現在の状態を前記自律移動装置内のセンサ群で検知させる検知ステップと、
前記自律移動装置における異常発生状態を検知又は予測した結果を得る制御ステップと、
を実行させるためのプログラムであって、
前記制御ステップは、
前記センサ群で検知された検知開始時点から現時点までの時系列データである現センサデータを取得し、
前記現センサデータを第1所定間隔毎に分割した現分割データと前記現センサデータとに基づき生成された複数のグラフである現グラフ群を、学習済みモデルに入力し、前記結果を得、
前記学習済みモデルは、前記自律移動装置及び他の同種の自律移動装置の少なくとも1つにおける状態について装置内部のセンサ群で検知した時系列データである蓄積センサデータについて、前記蓄積センサデータを第2所定間隔毎に分割した蓄積分割データと前記蓄積センサデータとに基づき生成された複数のグラフである蓄積グラフ群を、未学習モデルに入力して機械学習を行うことで構築された学習モデルである、
プログラム。
1a 自律移動装置の制御部
1b センサ群
2 学習装置
2a 制御部
2b 通信部
2c 記憶部
2d 未学習モデル
2e 蓄積グラフ群
10、20、30、40 自律移動装置(ドローン)
11、38 正常センサデータ
12、39 正常センサデータグラフ化部
13、23、33 モデル学習部
14、24、34、44 モデルDB
15、25、35 現センサデータ
16、26、36 現センサデータグラフ化部
17、27、37、47 異常識別部
21、31 異常センサデータ
22、32 異常センサデータグラフ化部
41 予兆モデルDB、
42 予兆モデル選択部、
100 装置
101 プロセッサ
102 メモリ
103 インタフェース
Claims (10)
- 自律移動装置における現在の状態を検知するセンサ群と、
制御部と、
を備え、
前記制御部は、
前記センサ群で検知された検知開始時点から現時点までの時系列データである現センサデータを取得し、
前記現センサデータを第1所定間隔毎に分割した現分割データと前記現センサデータとに基づき生成された複数のグラフである現グラフ群を、学習済みモデルに入力し、前記自律移動装置における異常発生状態を検知又は予測した結果を得、
前記学習済みモデルは、前記自律移動装置及び他の同種の自律移動装置の少なくとも1つにおける状態について装置内部のセンサ群で検知した時系列データである蓄積センサデータについて、前記蓄積センサデータを第2所定間隔毎に分割した蓄積分割データと前記蓄積センサデータとに基づき生成された複数のグラフである蓄積グラフ群を、未学習モデルに入力して機械学習を行うことで構築された学習モデルであり、
前記蓄積センサデータは、前記自律移動装置及び他の同種の自律移動装置の少なくとも1つにおける動作状況についての第1時系列データと、前記自律移動装置及び他の同種の自律移動装置の少なくとも1つにおける運行管理を行う側に報告する現在の位置についての第2時系列データと、を含み、
前記学習済みモデルは、前記蓄積グラフ群として、前記第1時系列データを前記第2所定間隔毎に分割した第1蓄積分割データと前記第1時系列データとに基づき生成された複数の第1グラフである第1蓄積グラフ群と、前記第2時系列データを前記第2所定間隔毎に分割した第2蓄積分割データと前記第2時系列データとに基づき生成された複数の第2グラフである第2蓄積グラフ群と、を前記未学習モデルに入力して機械学習を行うことで構築された学習モデルであり、
前記現センサデータは、前記自律移動装置における動作状況についての第3時系列データと、前記自律移動装置における運行管理を行う側に報告する現在の位置についての第4時系列データと、を含み、
前記現グラフ群として、前記第3時系列データを前記第1所定間隔毎に分割した第1現分割データと前記第3時系列データとに基づき生成された複数のグラフである第1現グラフ群と、前記第4時系列データを前記第1所定間隔毎に分割した第2現分割データと前記第4時系列データとに基づき生成された複数のグラフである第2現グラフ群とを、前記学習済みモデルに入力し、前記結果を得る、
自律移動装置。 - Nを1以上の整数、iを1からNまでの整数、Mを1以上の整数、jを1からMまでの整数とし、
前記学習済みモデルに入力される前記現グラフ群は、検知開始時点から前記第1所定間隔がi回分経過するまでの合計N個の期間のそれぞれについて、対応するi個の前記現分割データを示すように生成された、N個のグラフを有し、
前記未学習モデルに入力される前記蓄積グラフ群は、検知開始時点から前記第2所定間隔がj回分経過するまでの合計M個の期間のそれぞれについて、対応するj個の前記現分割データを示すように生成された、M個のグラフを有する、
請求項1に記載の自律移動装置。 - 前記蓄積センサデータは、前記自律移動装置及び前記他の同種の自律移動装置の少なくとも1つにおける正常時の状態を、各装置内部のセンサ群で検知した時系列データである正常センサデータを含む、
請求項1又は2に記載の自律移動装置。 - 前記蓄積センサデータは、前記自律移動装置及び前記他の同種の自律移動装置の少なくとも1つにおける異常時の状態を、各装置内部のセンサ群で検知した時系列データである異常センサデータを含む、
請求項1~3のいずれか1項に記載の自律移動装置。 - 前記制御部は、
前記機械学習のアルゴリズム及び前記機械学習に用いた蓄積センサデータのうちの少なくとも一方が異なる複数の前記学習済みモデルの中から、使用する学習済みモデルを選択し、
選択した学習済みモデルである選択モデルを使用して、前記結果を得る、
請求項1~4のいずれか1項に記載の自律移動装置。 - 前記制御部は、前記結果として、正常時の状態、異常時の予兆がある状態、及び異常時の状態を含む、複数の状態のうち1つを得る、
請求項1~5のいずれか1項に記載の自律移動装置。 - 前記制御部は、前記学習済みモデルを生成する学習部を備え、
前記学習部は、
前記蓄積センサデータを取得し、
前記蓄積センサデータを前記第1所定間隔毎に分割して前記蓄積分割データを生成し、
前記蓄積分割データと前記蓄積センサデータとに基づき、前記蓄積グラフ群を生成し、
前記蓄積グラフ群を予め記憶された未学習モデルに入力して機械学習を行うことで、前記自律移動装置における異常発生状態を検知又は予測した結果を得るための前記学習済みモデルを生成する、
請求項1~6のいずれか1項に記載の自律移動装置。 - 自律移動装置における現在の状態を検知するセンサ群を備えた自律移動装置と通信する学習装置側通信部と、
学習装置側記憶部と、
学習装置側制御部と、
を備え、
前記学習装置側制御部は、
前記学習装置側通信部を介して前記自律移動装置及び他の同種の自律移動装置の少なくとも1つから、前記センサ群で検知された検知開始時点から検知終了時点までの時系列データである蓄積センサデータ又は前記蓄積センサデータを第1所定間隔毎に分割した蓄積分割データを受信して、前記学習装置側記憶部に記憶し、
前記蓄積分割データと前記蓄積センサデータとに基づき、複数のグラフである蓄積グラフ群を生成し、
前記蓄積グラフ群を前記学習装置側記憶部に予め記憶された未学習モデルに入力して機械学習を行うことで、前記自律移動装置における異常発生状態を検知又は予測した結果を得るための学習済みモデルを生成し、
前記蓄積センサデータは、前記自律移動装置及び他の同種の自律移動装置の少なくとも1つにおける動作状況についての第1時系列データと、前記自律移動装置及び他の同種の自律移動装置の少なくとも1つにおける運行管理を行う側に報告する現在の位置についての第2時系列データと、を含み、
前記学習済みモデルは、前記蓄積グラフ群として、前記第1時系列データを前記第2所定間隔毎に分割した第1蓄積分割データと前記第1時系列データとに基づき生成された複数の第1グラフである第1蓄積グラフ群と、前記第2時系列データを前記第2所定間隔毎に分割した第2蓄積分割データと前記第2時系列データとに基づき生成された複数の第2グラフである第2蓄積グラフ群と、を前記未学習モデルに入力して機械学習を行うことで構築された学習モデルである、
学習装置。 - 自律移動装置における現在の状態を前記自律移動装置内のセンサ群で検知する検知ステップと、
前記自律移動装置における異常発生状態を検知又は予測した結果を得る制御ステップと、
を備え、
前記制御ステップは、
前記センサ群で検知された検知開始時点から現時点までの時系列データである現センサデータを取得し、
前記現センサデータを第1所定間隔毎に分割した現分割データと前記現センサデータとに基づき生成された複数のグラフである現グラフ群を、学習済みモデルに入力し、前記結果を得、
前記学習済みモデルは、前記自律移動装置及び他の同種の自律移動装置の少なくとも1つにおける状態について装置内部のセンサ群で検知した時系列データである蓄積センサデータについて、前記蓄積センサデータを第2所定間隔毎に分割した蓄積分割データと前記蓄積センサデータとに基づき生成された複数のグラフである蓄積グラフ群を、未学習モデルに入力して機械学習を行うことで構築された学習モデルであり、
前記蓄積センサデータは、前記自律移動装置及び他の同種の自律移動装置の少なくとも1つにおける動作状況についての第1時系列データと、前記自律移動装置及び他の同種の自律移動装置の少なくとも1つにおける運行管理を行う側に報告する現在の位置についての第2時系列データと、を含み、
前記学習済みモデルは、前記蓄積グラフ群として、前記第1時系列データを前記第2所定間隔毎に分割した第1蓄積分割データと前記第1時系列データとに基づき生成された複数の第1グラフである第1蓄積グラフ群と、前記第2時系列データを前記第2所定間隔毎に分割した第2蓄積分割データと前記第2時系列データとに基づき生成された複数の第2グラフである第2蓄積グラフ群と、を前記未学習モデルに入力して機械学習を行うことで構築された学習モデルであり、
前記現センサデータは、前記自律移動装置における動作状況についての第3時系列データと、前記自律移動装置における運行管理を行う側に報告する現在の位置についての第4時系列データと、を含み、
前記制御ステップは、前記現グラフ群として、前記第3時系列データを前記第1所定間隔毎に分割した第1現分割データと前記第3時系列データとに基づき生成された複数のグラフである第1現グラフ群と、前記第4時系列データを前記第1所定間隔毎に分割した第2現分割データと前記第4時系列データとに基づき生成された複数のグラフである第2現グラフ群とを、前記学習済みモデルに入力し、前記結果を得る、
異常検知方法。 - 自律移動装置のコンピュータに、
前記自律移動装置における現在の状態を前記自律移動装置内のセンサ群で検知させる検知ステップと、
前記自律移動装置における異常発生状態を検知又は予測した結果を得る制御ステップと、
を実行させるためのプログラムであって、
前記制御ステップは、
前記センサ群で検知された検知開始時点から現時点までの時系列データである現センサデータを取得し、
前記現センサデータを第1所定間隔毎に分割した現分割データと前記現センサデータとに基づき生成された複数のグラフである現グラフ群を、学習済みモデルに入力し、前記結果を得、
前記学習済みモデルは、前記自律移動装置及び他の同種の自律移動装置の少なくとも1つにおける状態について装置内部のセンサ群で検知した時系列データである蓄積センサデータについて、前記蓄積センサデータを第2所定間隔毎に分割した蓄積分割データと前記蓄積センサデータとに基づき生成された複数のグラフである蓄積グラフ群を、未学習モデルに入力して機械学習を行うことで構築された学習モデルであり、
前記蓄積センサデータは、前記自律移動装置及び他の同種の自律移動装置の少なくとも1つにおける動作状況についての第1時系列データと、前記自律移動装置及び他の同種の自律移動装置の少なくとも1つにおける運行管理を行う側に報告する現在の位置についての第2時系列データと、を含み、
前記学習済みモデルは、前記蓄積グラフ群として、前記第1時系列データを前記第2所定間隔毎に分割した第1蓄積分割データと前記第1時系列データとに基づき生成された複数の第1グラフである第1蓄積グラフ群と、前記第2時系列データを前記第2所定間隔毎に分割した第2蓄積分割データと前記第2時系列データとに基づき生成された複数の第2グラフである第2蓄積グラフ群と、を前記未学習モデルに入力して機械学習を行うことで構築された学習モデルであり、
前記現センサデータは、前記自律移動装置における動作状況についての第3時系列データと、前記自律移動装置における運行管理を行う側に報告する現在の位置についての第4時系列データと、を含み、
前記制御ステップは、前記現グラフ群として、前記第3時系列データを前記第1所定間隔毎に分割した第1現分割データと前記第3時系列データとに基づき生成された複数のグラフである第1現グラフ群と、前記第4時系列データを前記第1所定間隔毎に分割した第2現分割データと前記第4時系列データとに基づき生成された複数のグラフである第2現グラフ群とを、前記学習済みモデルに入力し、前記結果を得る、
プログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020000463A JP7541660B2 (ja) | 2020-01-06 | 2020-01-06 | 自律移動装置、学習装置、異常検知方法、及びプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020000463A JP7541660B2 (ja) | 2020-01-06 | 2020-01-06 | 自律移動装置、学習装置、異常検知方法、及びプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2021110979A JP2021110979A (ja) | 2021-08-02 |
| JP7541660B2 true JP7541660B2 (ja) | 2024-08-29 |
Family
ID=77059829
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020000463A Active JP7541660B2 (ja) | 2020-01-06 | 2020-01-06 | 自律移動装置、学習装置、異常検知方法、及びプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7541660B2 (ja) |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011059790A (ja) | 2009-09-07 | 2011-03-24 | Hitachi Ltd | 異常検知・診断方法、異常検知・診断システム、及び異常検知・診断プログラム |
| WO2015141221A1 (ja) | 2014-03-20 | 2015-09-24 | 日本電気株式会社 | 情報処理装置及び異常検知方法 |
| JP2018124639A (ja) | 2017-01-30 | 2018-08-09 | 日本電気株式会社 | データ分析システム、データ分析方法およびプログラム |
| JP2019123337A (ja) | 2018-01-15 | 2019-07-25 | 本郷飛行機株式会社 | 動作体 |
| US20190310651A1 (en) | 2018-04-10 | 2019-10-10 | Uber Technologies, Inc. | Object Detection and Determination of Motion Information Using Curve-Fitting in Autonomous Vehicle Applications |
| WO2019244930A1 (ja) | 2018-06-20 | 2019-12-26 | 日本電信電話株式会社 | 検知装置、検知方法および検知プログラム |
-
2020
- 2020-01-06 JP JP2020000463A patent/JP7541660B2/ja active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011059790A (ja) | 2009-09-07 | 2011-03-24 | Hitachi Ltd | 異常検知・診断方法、異常検知・診断システム、及び異常検知・診断プログラム |
| WO2015141221A1 (ja) | 2014-03-20 | 2015-09-24 | 日本電気株式会社 | 情報処理装置及び異常検知方法 |
| JP2018124639A (ja) | 2017-01-30 | 2018-08-09 | 日本電気株式会社 | データ分析システム、データ分析方法およびプログラム |
| JP2019123337A (ja) | 2018-01-15 | 2019-07-25 | 本郷飛行機株式会社 | 動作体 |
| US20190310651A1 (en) | 2018-04-10 | 2019-10-10 | Uber Technologies, Inc. | Object Detection and Determination of Motion Information Using Curve-Fitting in Autonomous Vehicle Applications |
| WO2019244930A1 (ja) | 2018-06-20 | 2019-12-26 | 日本電信電話株式会社 | 検知装置、検知方法および検知プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2021110979A (ja) | 2021-08-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11144378B2 (en) | Computer system and method for recommending an operating mode of an asset | |
| US7478013B2 (en) | Method and system of monitoring and prognostics | |
| JP7017861B2 (ja) | 異常検知システムおよび異常検知方法 | |
| US20220100595A1 (en) | Computer System and Method for Recommending an Operating Mode of an Asset | |
| CN110515351A (zh) | 异常检测器 | |
| CA3016585C (en) | MANAGING PREDICTIVE MODELS BASED ON AN ASSET'S LOCATION | |
| CN117277592B (zh) | 一种高压电路信号监测的保护切换方法 | |
| CN119902559B (zh) | 一种数据驱动的无人机飞控系统实时缺陷预测系统及方法 | |
| JP2019527897A (ja) | アセットの修理を推奨するコンピュータ・アーキテクチャ及び方法 | |
| JP7582794B2 (ja) | 航空機センサをモデリングするためのデータ主導方式機械学習 | |
| US9116965B2 (en) | Method and apparatus for monitoring performance characteristics of a system and identifying faults | |
| US12455562B2 (en) | Self-maintaining autonomous vehicle procedure | |
| Ahn | Deep learning based anomaly detection for a vehicle in swarm drone system | |
| US12441307B2 (en) | Obstruction detection system | |
| JP2023105796A (ja) | 検査システムおよび方法 | |
| JP7541660B2 (ja) | 自律移動装置、学習装置、異常検知方法、及びプログラム | |
| Jia et al. | A hybrid delay-aware approach towards UAV flight data anomaly detection | |
| JP2023152816A (ja) | 資産の修理を評価するシステムおよび方法 | |
| JP7637345B2 (ja) | 自律移動装置、サーバ装置、異常検知方法、及びプログラム | |
| Mustafa et al. | Machine learning based techniques for failure detection and prediction in unmanned aerial vehicle | |
| Bompilwar et al. | Safe-to-fly: An On-board Intelligent Fault Diagnosis System With AutoML for Unmanned Aerial Vehicles | |
| KR102665097B1 (ko) | 군집 시스템에서 개별 이동체의 이상 탐지 방법 및 장치 | |
| CN112801321B (zh) | 轨道交通运输及载具运行系统中的数据处理方法、系统 | |
| KR102697177B1 (ko) | 드론 비행 관제 및 장애진단 시스템과 방법 | |
| Tekulu et al. | Anomaly Detection for Unmanned Surface Vehicles Based on a Multi-Modal Bayesian Generative Model |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200124 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20221209 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20231130 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20231212 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240110 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20240402 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240612 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20240621 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240709 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240801 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7541660 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |