JP7545007B2 - エレベータ装置 - Google Patents
エレベータ装置 Download PDFInfo
- Publication number
- JP7545007B2 JP7545007B2 JP2024507364A JP2024507364A JP7545007B2 JP 7545007 B2 JP7545007 B2 JP 7545007B2 JP 2024507364 A JP2024507364 A JP 2024507364A JP 2024507364 A JP2024507364 A JP 2024507364A JP 7545007 B2 JP7545007 B2 JP 7545007B2
- Authority
- JP
- Japan
- Prior art keywords
- elevator
- car
- electric actuator
- control device
- return operation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B5/00—Applications of checking, fault-correcting, or safety devices in elevators
- B66B5/02—Applications of checking, fault-correcting, or safety devices in elevators responsive to abnormal operating conditions
- B66B5/04—Applications of checking, fault-correcting, or safety devices in elevators responsive to abnormal operating conditions for detecting excessive speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B5/00—Applications of checking, fault-correcting, or safety devices in elevators
- B66B5/02—Applications of checking, fault-correcting, or safety devices in elevators responsive to abnormal operating conditions
- B66B5/16—Braking or catch devices operating between cars, cages, or skips and fixed guide elements or surfaces in hoistway or well
- B66B5/18—Braking or catch devices operating between cars, cages, or skips and fixed guide elements or surfaces in hoistway or well and applying frictional retarding forces
- B66B5/22—Braking or catch devices operating between cars, cages, or skips and fixed guide elements or surfaces in hoistway or well and applying frictional retarding forces by means of linearly-movable wedges
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B1/00—Control systems of elevators in general
- B66B1/24—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration
- B66B1/28—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration electrical
- B66B1/32—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration electrical effective on braking devices, e.g. acting on electrically controlled brakes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B5/00—Applications of checking, fault-correcting, or safety devices in elevators
- B66B5/02—Applications of checking, fault-correcting, or safety devices in elevators responsive to abnormal operating conditions
- B66B5/027—Applications of checking, fault-correcting, or safety devices in elevators responsive to abnormal operating conditions to permit passengers to leave an elevator car in case of failure, e.g. moving the car to a reference floor or unlocking the door
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B5/00—Applications of checking, fault-correcting, or safety devices in elevators
- B66B5/02—Applications of checking, fault-correcting, or safety devices in elevators responsive to abnormal operating conditions
- B66B5/16—Braking or catch devices operating between cars, cages, or skips and fixed guide elements or surfaces in hoistway or well
- B66B5/18—Braking or catch devices operating between cars, cages, or skips and fixed guide elements or surfaces in hoistway or well and applying frictional retarding forces
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Maintenance And Inspection Apparatuses For Elevators (AREA)
Description
本発明は、電動作動器によって動作する非常止め装置を備えるエレベータ装置に関する。
エレベータ装置には、乗りかごの昇降速度を常時監視して、所定の過速状態に陥った乗りかごを非常停止させるために、ガバナおよび非常止め装置が備えられている。一般に、乗りかごとガバナはガバナロープによって結合されており、過速状態を検出すると、ガバナがガバナロープを拘束することで乗りかご側の非常止め装置を動作させ、乗りかごを非常停止するようになっている。
このようなエレベータ装置では、昇降路内に長尺物であるガバナロープを敷設するため、省スペース化および低コスト化が難しい。また、ガバナロープが振れる場合、昇降路内における構造物とガバナロープとが干渉しやすくなる。
これに対し、ガバナロープを用いず、電動で作動する非常止め装置が提案されている。このような非常止め装置に関する従来技術として、特許文献1に記載された技術が知られている。
本従来技術では、乗りかご上に、非常止め装置を駆動する駆動軸と、駆動軸を作動させる電動作動器が設けられる。電動作動器は、駆動軸に機械的に接続される可動鉄心と、可動鉄心を吸着する電磁石を備えている。駆動軸は、駆動ばねによって付勢されているが、通常時は、電磁石が通電され可動鉄心が吸着されているため、電動作動器によって駆動軸の動きが拘束されている。
非常時には、電磁石が消磁されて駆動軸の拘束が解かれ、駆動ばねの付勢力によって駆動軸が駆動される。これにより、非常止め装置が動作して、乗りかごが非常停止する。
また、非常止め装置を通常状態に復帰させるときには、非常時に移動した可動鉄心に電磁石を移動して近付ける。電磁石は送りねじ軸に螺合する送りナットを備えており、モータによって送りねじ軸が回転すると、電磁石は可動鉄心に向かって移動する。電磁石が可動鉄心に当接したら、可動鉄心が電磁石に吸着される。さらに、可動鉄心が電磁石に吸着された状態で、電磁石を移動して、可動鉄心および電磁石を通常時の待機位置に戻す。
上記従来技術では、停電にともない電磁石の電源が消失すると、過速状態検出時と同様に、電動作動器が作動して、非常止め装置が動作する。したがって、電動作動器の状態によっては、停電中や復電時の乗りかごの運転が難しくなる。
そこで、本発明は、電動作動器によって動作する非常止め装置を備えながらも、停電時運転機能を有するエレベータ装置を提供する。
上記課題を解決するために、本発明によるエレベータ装置は、乗りかごと、乗りかごに設けられる非常止め装置と、非常止め装置を駆動する駆動機構と、駆動機構を作動させる電動作動器と、乗りかごの運転を制御する制御装置と、を備える。電動作動器は、駆動機構と機械的に接続される可動子と、可動子と対向する電磁石と、モータの回転を電磁石の直線的移動に変換する機構部と、を備える。制御装置は、停電に伴い電動作動器が作動したと判定すると、電動作動器に、機構部によって可動子を待機位置に戻す復帰動作を指令し、復帰動作が失敗したと判定すると、乗りかごを、上昇運転し、乗りかごの停止位置から上方の最寄り階に着床させる。
本発明によれば、電動作動器によって動作する非常止め装置を備えるエレベータ装置が、停電時運転機能を有することができる。
上記した以外の課題、構成および効果は、以下の実施形態の説明により明らかにされる。
以下、本発明の一実施形態であるエレベータ装置について、実施例により、図面を用いながら説明する。なお、各図において、参照番号が同一のものは同一の構成要件あるいは類似の機能を備えた構成要件を示している。
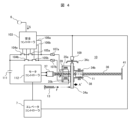
図1は、本発明の一実施例であるエレベータ装置の概略構成図である。
図1に示すように、エレベータ装置は、乗りかご1と、速度センサ(5,6)と、電動作動器10と、駆動機構(12~20)と、引上げロッド21と、非常止め装置2とを備えている。
乗りかご1は、建築物に設けられる昇降路内に主ロープ(図示せず)により吊られており、ガイド装置を介してガイドレール4に摺動可能に係合している。駆動装置(巻上機:図示せず)により主ロープが摩擦駆動されると、乗りかご1は昇降路内を昇降する。
本実施例における速度センサは、乗りかご1上に備えられ、回転検出器6と、回転検出器6の回転軸に接続されるローラ5を備える。本実施例においては、ローラ5は、ローラ5の回転軸と回転検出器6の回転軸とが同軸になるように、回転検出器6の回転軸に接続されている。回転検出器6として、例えば、ロータリエンコーダが適用できる。
ローラ5は、ガイドレール4に接触している。このため、乗りかご1が昇降すると、ローラ5が回転するので、回転検出器6が回転する。回転検出器6が回転に伴って出力する回転位置信号に基づいて、後述する安全コントローラが、乗りかご1の走行速度を監視している。
なお、速度センサとして、画像センサが適用されてもよい。この場合、画像センサによって取得されるガイドレール4の表面状態の画像情報に基づいて、乗りかご1の位置および速度が検出される。例えば、所定時間における画像特徴量の移動距離から速度が算出される。
電動作動器10は、本実施例では電磁操作器であり、乗りかご1の上部に配置される。電磁操作器は、例えば、ソレノイドもしくは電磁石によって作動する可動片もしくは可動杆を備えるものである。電動作動器10は、速度センサ(5,6)によって乗りかご1の所定の過速状態が検出されるときに作動する。このとき、操作レバー11に機械的に接続されている駆動機構(12~20)により、引上げロッド21が引き上げられる。これにより、非常止め装置2が制動状態となる。
なお、駆動機構(12~20)については後述する。
非常止め装置2は、乗りかご1の左右に一台ずつ配置される。各非常止め装置2が備える図示しない一対の制動子は、制動位置および非制動位置の間で可動であり、制動位置においてガイドレール4を挟持する。さらに、非常止め装置2は、乗りかご1の下降により、乗りかご1に対して相対的に上昇すると、制動子とガイドレール4との間に作用する摩擦力により制動力を生じる。これにより、非常止め装置2は、乗りかご1が過速状態に陥ったときに作動し、乗りかご1を非常停止させる。
本実施例のエレベータ装置は、ガバナロープを用いない、いわゆるロープレスガバナシステムを備えるものであり、乗りかご1の昇降速度が定格速度を超えて第1過速度(例えば、定格速度の1.3倍を超えない速度)に達すると、駆動装置(巻上機)の電源およびこの駆動装置を制御する制御装置の電源が遮断される。また、乗りかご1の下降速度が第2過速度(例えば、定格速度の1.4倍を超えない速度)に達すると、乗りかご1に設けられる電動作動器10が電気的に駆動され、非常止め装置2を作動させて、乗りかご1が非常停止される。
本実施例において、ロープレスガバナシステムは、前述の速度センサ(5,6)と、速度センサの出力信号に基づいて乗りかご1の過速状態を判定する安全コントローラとから構成される。この安全コントローラは、速度センサの出力信号に基づいて乗りかご1の速度を計測し、計測される速度が第1過速度に達したと判定すると、駆動装置(巻上機)の電源およびこの駆動装置を制御する制御装置の電源を遮断するための指令信号を出力する。また、安全コントローラは、計測される速度が第2過速度に達したと判定すると、電動作動器10を作動させるための指令信号を出力する。
前述のように、非常止め装置2が備える一対の制動子が引上げロッド21によって引き上げられると、一対の制動子がガイドレール4を挟持する。引上げロッド21は、電動作動器10に接続される駆動機構(12~20)によって駆動される。
以下、この駆動機構の構成について説明する。
電動作動器10の操作レバー11と第1の作動片16が連結され、略T字状の第1リンク部材が構成される。操作レバー11および第1の作動片16はそれぞれT字の頭部および足部を構成する。略T字状の第1リンク部材は、操作レバー11と第1の作動片16の連結部において、第1の作動軸19を介してクロスヘッド50に回動可能に支持される。T字の足部となる第1の作動片16における操作レバー11と第1の作動片16の連結部とは反対側の端部に、一対の引上げロッド21の一方(図中左側)の端部が接続される。
接続片17と第2の作動片18が連結され、略T字状の第2リンク部材が構成される。接続片17および第2の作動片18はそれぞれT字の頭部および足部を構成する。略T字状の第2リンク部材は、接続片17と第2の作動片18の連結部において、第2の作動軸20を介してクロスヘッド50に回動可能に支持される。T字の足部となる第2の作動片18における接続片17と第2の作動片18の連結部とは反対側の端部に、一対の引上げロッド21の他方(図中左側)の端部が接続される。
筐体30の内部から外部に伸びる操作レバー11の端部と、接続片17の両端部の内、第2の作動軸20よりも乗りかご1の上部に近い端部とが、それぞれ、乗りかご1上に横たわる駆動軸12の一端(図中左側)と他端(図中右側)とに接続される。駆動軸12は、クロスヘッド50に固定される固定部14を摺動可能に貫通している。また、駆動軸12は、押圧部材15を貫通し、押圧部材15は駆動軸12に固定されている。なお、押圧部材15は、固定部14の第2リンク部材(接続片17、第2の作動片18)側に位置する。固定部14と押圧部材15の間に、弾性体である駆動ばね13が位置し、駆動ばね13には駆動軸12が挿通されている。
電動作動器10が作動すると、すなわち本実施例では電磁石への通電が遮断されると、駆動ばね13の付勢力に抗して操作レバー11の動きを拘束する電磁力が消失するので、押圧部材15に加わる駆動ばね13の付勢力によって、駆動軸12が長手方向に沿って駆動される。このため、第1リンク部材(操作レバー11、第1の作動片16)が第1の作動軸19の回りに回動するとともに、第2リンク部材(接続片17、第2の作動片18)が第2の作動軸20の回りに回動する。これにより、第1リンク部材の第1の作動片16に接続される一方の引上げロッド21が駆動されて引き上げられるとともに、第2リンク部材の第2の作動片18に接続される他方の引上げロッド21が駆動されて引き上げられる。
図2は、本実施例における電動作動器10の機械部分および電気機器部を示す、図1の設置状態における平面図である。なお、図2に示す電動作動器10は、図1においては、筐体30内に格納されている(図3,4も同様)。
図2には、電気機器部を制御するための回路構成を併記する(図3,4も同様)。図2において、非常止め装置2(図1)は非制動状態であり、電動作動器10は待機状態である。すなわち、エレベータ装置は、通常の運転状態である。
図2に示すように、待機状態においては、操作レバー11に接続される可動部材である可動子(34a,34b,34c)が、コイルが通電されて励磁されている電磁石35a,35bに、電磁力によって吸着されている。これにより、駆動軸12(図1)および操作レバー11を介して可動子に作用する駆動ばね13(図1)の付勢力Fに抗して、可動子の動きが拘束されている。したがって、電動作動器10は、駆動ばね13の付勢力に抗して、駆動機構(12~20:図1)の動きを拘束している。
可動子は、電磁石35a,35bの磁極面に吸着される吸着部34aと、吸着部34aに固定され、操作レバー11が接続される支持部34bを有する。操作レバー11は、接続ブラケット38を介して、可動子における支持部34bに回動可能に接続される。電動作動器10において、待機時に可動子の吸着部34aが位置する位置には、可動子検出スイッチ109が設けられる。
可動子は、さらに、吸着部34aに固定されるカム部34cを有する。可動子が待機位置に位置するとき、カム部34cによって可動子検出スイッチ109が操作される。可動子検出スイッチ109は、カム部34cによって操作されると、オン状態からオフ状態へ、もしくはオフ状態からオン状態へ、遷移する。したがって、可動子検出スイッチ109の状態に応じて、可動子が待機位置に位置しているか否かを検出できる。本実施例では、安全コントローラ103が、可動子検出スイッチ109の状態に基づいて、可動子が待機位置に位置しているか否かを判定する。
なお、本実施例では、可動子検出スイッチ109は、カム部34cによって操作されているとき、オン状態である。
本実施例では、可動子(34a,34b,34c)において、少なくとも吸着部34aは、磁性体からなる。磁性体として、好ましくは、低炭素鋼やパーマロイ(鉄・ニッケル合金)などの軟磁性体が適用される。
図2中における他の機構部(36,37,39,41)については、後述する。
電磁石35a,35bは、直流電源111によって励磁される。電磁石35aの励磁回路において、電磁石35aのコイルの一端は、直列接続される電気接点104a,105a並びにフューズ107aを介して、直流電源111の高電位側に接続され、かつ電磁石35aのコイルの他端は、直流電源111の低電位側に接続される。電磁石35bの励磁回路において、電磁石35bのコイルの一端は、直列接続される電気接点104b,105a並びにフューズ107bを介して、直流電源111の高電位側に接続され、かつ電磁石35bのコイルの他端は、直流電源111の低電位側に接続される。
本実施例において、直流電源111は、商用交流電源からの交流電力を直流電力に変換する整流装置や電力変換装置から構成される。また、本実施例においては、直流電源111として、停電時に負荷への電力供給を短時間だけ補償するバックアップ機能を有する直流電源が適用されている。
なお、フューズ107a,107bは、それぞれ、電磁石35a,35bの過電流保護のために、励磁回路中に設けられる。
電気接点104a,105a,104b,105bは、安全コントローラ103によってオン・オフが制御される。電動作動器10の待機状態では、安全コントローラ103は、電気接点104a,105a,104b,105bの各々を、オン状態に制御する。これにより、電磁石35a,35bのコイルが通電されるので、電磁石35a,35bが電磁力を発生する。
なお、電気接点104a,105a,104b,105bの各々は、例えば、電磁リレー、電磁接触器、電磁開閉器などが備える接点から構成される。なお、電磁石35a,35bの各励磁回路において、複数(図2では2個)の電気接点が直列接続されていることにより、後述するように非常止め装置2を作動させるために複数の電気接点をオフ状態に制御する時に一つの接点にオン故障が生じていても、電磁石の通電が遮断される。したがって、電動作動器10の動作の信頼性が向上する。なお、オン故障は、例えば、接点の溶着によって発生する。
他の電気機器部(37,112)については、後述する(図3,4)。また、信号線106a,106bは、電磁石35a,35bの各励磁回路からのアンサーバック信号を安全コントローラ103に入力するために用いられる。
信号線106aを介して安全コントローラ103に入力されるアンサーバック信号(以下、「アンサーバック信号(106a)」と記す)は、電磁石35aのコイルの両端の内、電気接点104a,105aを介して直流電源111の高電位側に接続される一端の電位を示す。したがって、アンサーバック信号(106a)は、電磁石35aが通電されていれば、直流電源111の高電位側の電位(高電位(HIGH))を示し、電磁石35aが通電されていなけれ、直流電源111の低電位側の電位(低電位(LOW))を示す。このようなアンサーバック信号(106a)が示す電位に基づいて、安全コントローラ103は、電磁石35aの通電状態を検出する。
信号線106bを介して安全コントローラ103に入力されるアンサーバック信号(以下、「アンサーバック信号(106b)」と記す)は、電磁石35bのコイルの両端の内、電気接点104b,105bを介して直流電源111の高電位側に接続される一端の電位を示す。したがって、アンサーバック信号(106b)は、電磁石35bが通電されていれば、直流電源111の高電位側の電位(高電位(HIGH))を示し、電磁石35bが通電されていなけれ、直流電源111の低電位側の電位(低電位(LOW))を示す。このようなアンサーバック信号(106b)が示す電位に基づいて、安全コントローラ103は、電磁石35bの通電状態を検出する。
次に、非常止め装置2が作動する時における電動作動器10の動作について説明する。
安全コントローラ103は、回転検出器6からの回転位置信号に基づいて乗りかご1の所定の過速状態(前述の第2過速度)を検出すると、電気接点104a,105a,104b,105bの各々に対し、オフ指令を出力する。オフ指令により、電気接点104a,105a,104b,105bは、オン状態(図2)からオフ状態に遷移する。このため、電磁石35a,35bの励磁が停止されるので、可動子(34a,34b,34c)に作用する電磁力が消失する。これにより、可動子の吸着部34aが電磁石35a,35bに吸着されることによる可動子の拘束が解けるので、可動子は、駆動ばね13の付勢力(図2におけるF)によって、待機状態における位置(図2)から、駆動ばね13の付勢力の方向(図中の右方向)に移動する。
可動子の拘束が解けるのに伴い、駆動軸12の押圧部材15(図1)が受ける、固定部14(図1)から押圧部材(図1)へ向かう方向の、駆動ばね13(図1)の付勢力によって駆動軸12が駆動される。駆動軸12が駆動されると、駆動軸12に接続される第1リンク部材(操作レバー11および第1の作動片16:図1)が第1の作動軸19(図1)の回りに回動する。これにより、第1の作動片16に接続される引上げロッド21(図1)が引き上げられる。また、駆動軸12が駆動されると、駆動軸12に接続される第2リンク部材(接続片17および第2の作動片18:図1)が第2の作動軸20(図1)の回りに回動する。これにより、第2の作動片18に接続される引上げロッド21(図1)が引き上げられる。
次に、電動作動器10の復帰動作について説明する。
なお、本実施例では、復電時において、電動作動器10の作動状態に応じて、復帰動作が実行される。
図3は、復帰動作中(終了直前)における電動作動器10の動作状態を示す、図2と同様の、電動作動器10の平面図である。
電動作動器10を作動状態から図2に示すような待機状態に復帰させるためには、次に述べるように、図2で説明を省略した機構部(36,37,39,41)および電気機器部(37,112)によって、可動子(34a,34b,34c)を移動位置(図3の位置P)から待機時の位置(図2)に戻す。
電動作動器10は、可動子を駆動するために送りねじ36を有する。送りねじ36は、モータ37の回転軸に同軸に接続されるとともに、支持部材41によって回転可能に支持される。電磁石35a,35bは、送りナット部(図示せず)を備える電磁石支持板39に固定されている。電磁石支持板39における送りナット部は送りねじ36と螺合する。送りねじ36は、モータ37によって回転される。モータ37は、モータコントローラ112によって駆動される。
モータコントローラ112は、モータ37の駆動回路を備えており、エレベータコントローラ7からの制御指令に応じて、モータ37の回転を制御する。モータ37は、DCモータおよびACモータのいずれでもよい。
なお、エレベータコントローラ7は、乗りかご1の通常運転を制御し、乗りかご1の運転状態に関する情報を有している。本実施例では、上述のように、エレベータコントローラ7は、さらに、電動作動器10が備えるモータ37を制御する機能を有する。
電動作動器10を待機状態に復帰させるとき、エレベータコントローラ7は、モータコントローラ112に対し、モータ37の回転指令を送出する。モータコントローラ112は、回転指令を受けると、モータ37を駆動して送りねじ36を回転させる。回転する送りねじ36と電磁石支持板39が備える送りナット部とによって、モータ37の回転が、送りねじ36の軸方向に沿った電磁石35a,35bの直線的移動に変換される。これにより、電磁石35a,35bは、図3に示す可動子(34a,34b,34c)の移動位置Pに近づき、可動子に当接する。
モータコントローラ112は、モータ37の制御のために、モータ電流を監視している。上述のように電磁石35a,35bが可動子に当接すると、モータ37の負荷が増大するので、モータ電流が増加する。モータコントローラ112は、モータ電流が増加して所定値を超えたら、電磁石35a,35bが可動子に当接したと判定する。モータコントローラ112は、この判定結果を、安全コントローラ103およびエレベータコントローラ7に送る。
安全コントローラ103は、モータコントローラ112から判定結果を受けると、電気接点104a,105a,104b,105bの各々に対し、オン指令を出力する。オン指令により、電気接点104a,105a,104b,105bは、オフ状態からオン状態に遷移する。このため、電磁石35a,35bが励磁される。可動子における吸着部34aは、励磁された電磁石35a,35bによる電磁力が作用して、電磁石35a,35bに吸着される。
エレベータコントローラ7は、モータコントローラ112から前述の判定結果を受けると、モータ37の逆転指令をモータコントローラ112に送る。モータコントローラ112は、逆転指令を受けると、モータ37の回転方向を逆にして、送りねじ36を逆転させる。これにより、電磁石35a,35bに吸着されている可動子は、駆動ばね13の付勢力を受けながら、電磁石35a,35bとともに、待機時の位置(図2)に向けて移動する。
可動子(34a,34b,34c)が備えるカム部34cは、電動作動器10が作動して可動子(34a,34b,34c)が位置P(図3)まで移動してから、電動作動器10が復帰動作を完了する直前(図3)まで、可動子検出スイッチ109から離れている。したがって、このとき、可動子検出スイッチ109はオフ状態である。
図4は、復帰動作が終了した場合における、電動作動器10の動作状態を示す、図2と同様の、電動作動器10の平面図である。
電磁石35a,35bに吸着された可動子(34a,34b,34c)が待機位置に到達すると、可動子検出スイッチ109が、可動子が備えるカム部34cによって操作される。可動子検出スイッチ109が操作されると、エレベータコントローラ7は、可動子が待機位置に位置していると判定する。エレベータコントローラ7は、この判定結果に基づき、モータ37の停止指令をモータコントローラ112に送る。モータコントローラ112は、停止指令を受けると、モータ37の回転を停止する。
後述するように、エレベータコントローラ7は、復電時に、まず可動子検出スイッチ109のオン・オフ状態に基づき、電動作動器10の動作状態を確認する。エレベータコントローラ7は、可動子検出スイッチ109がオフ状態ならば、停電時に電動作動器10が作動したと判定する。また、エレベータコントローラ7は、復電時に復帰動作を指令した後において、可動子検出スイッチ109のオン・オフ状態に基づき、電動作動器10の動作状態を確認する。この場合、エレベータコントローラ7は、可動子検出スイッチ109がオン状態ならば、復帰動作が成功したと判定し、可動子検出スイッチ109がオフ状態ならば、復帰動作が失敗したと判定する。
図5は、本実施例のエレベータ装置における停電時運転機能を示す乗りかご1の動作状態図である。
乗りかご1が階床FAと階床FBとの間を走行中に停電が発生したため、復電直後は、乗りかご1が階床FAと階床FBとの間で停止している(図5中の中央に示す「乗りかご1」参照)。停電時における電磁石用の直流電源の消失に伴い、可動子(吸着部34aのみ図示)が電磁石35aから離れている。すなわち、電動作動器10が作動し、非常止め装置が動作している。
電動作動器10の復帰動作が実行され、電磁石35aに吸着された可動子が待機位置に戻ると、すなわち復帰動作が成功すると、乗りかご1は、停止位置から下降運転され(矢印DN参照)、停止位置の下方の最寄り階FAに着床する。
電動作動器10の復帰動作が実行されたにもかかわらず、可動子が電磁石35aに吸着されず、可動子が待機位置に戻らないと、すなわち復帰動作が失敗すると、乗りかご1は、停止位置から上昇運転され(矢印UP参照)、停止位置の上方の最寄り階FBに着床する。
復帰動作が成功する場合、電動作動器10の動作に伴って、非常止め装置2が解除される。これにより、乗りかご1の運転が可能になる。本実施例では、復帰動作が成功する場合、救出運転となる場合を考慮して、ロビー階により近い、停止位置から下方の階を、最寄り階としている。なお、停止位置から上方の階を、最寄り階としてもよい。また、本実施例では、復帰動作が成功する場合でも、停電に伴う乗りかご1の停止および非常止め装置2の動作を、異常が発生しているとして、乗りかご1が最寄り階に着床される。なお、乗りかご1の運転を通常運転に戻してもよい。
復帰動作が失敗する場合、電動作動器10が動作しても、非常止め装置2は解除されない。そこで、本実施例では、乗りかご1を上昇運転させて、非常止め装置2を解除するとともに、乗りかご1を停止位置から上方の最寄り階まで運転する。なお、本実施例では、停電に伴い乗りかご1が停止するので、乗りかごの下降に伴う非常止め装置2の制動子のレール押圧力増大は生じない。したがって、非常止め装置2は、比較的容易に解除できる。
このように、本実施例のエレベータ装置は、電動作動器10によって動作する非常止め装置を備えながらも、停電時運転機能を有する。
図6は、本実施例における停電時運転処理を示すフローチャートである。
本停電時運転処理は、エレベータコントローラ7によって実行される。本実施例におけるエレベータコントローラ7は、マイクロコンピュータなどのコンピュータシステムを備えている。このコンピュータシステムが所定のプログラムを実行することにより、エレベータコントローラ7は停電時運転処理を実行する。
復電時に処理が開始されると、ステップS1において、エレベータコントローラ7は、可動子検出スイッチ109がオフ状態であるかを判定する。すなわち、エレベータコントローラ7は、停電時に電動作動器10が作動したかを判定する。エレベータコントローラ7は、オフ状態であると判定すると(ステップS1のYES)、次にステップS4を実行し、オフ状態ではないと、すなわちオン状態であると判定すると(ステップS1のNO)、次にステップS2を実行する。
本実施例では、電磁石35a,35b用の直流電源111のバックアップ機能が正常でる場合、停電時において電磁石35a,35bの電磁力が維持され、電動作動器10の待機状態が保持される。したがって、復電時において、可動子検出スイッチ109はオン状態である。このバックアップ機能が不十分もしくは異常である場合、例えば、停電時間がバックアップ機能の保証時間よりも長かった場合においては、電磁石35a,35bの電磁力が消失するため、電動作動器10が作動する。したがって、復電時において、可動子検出スイッチ109はオフ状態である。
ステップS2において、エレベータコントローラ7は、運転制御用の位置検出器(図示せず)からの信号に基づいて、乗りかご1の停止位置がドア開可能ゾーン外であるかを判定する。本実施例では、公知技術による位置検出器、例えば、昇降路内に設けられる遮蔽板と乗りかごに設けられる光電センサとからなる位置検出器が適用される。
エレベータコントローラ7は、ドア開可能ゾーン外であると判定すると(ステップS2のYES)、次にステップS3を実行する。また、エレベータコントローラ7は、ドア開可能ゾーン外ではないと、すなわちドア開可能ゾーン内であると判定すると(ステップS2のNO)、一連の処理を終了して、通常の運転制御を実行する。
ステップS3において、エレベータコントローラ7は、乗りかご1を、停止位置からドア開可能ゾーンまで下降(DN)運転し、停止位置の下方の最寄り階に着床させる。エレベータコントローラ7は、ステップS3を実行後、ドア開可能ゾーン外ではないと、すなわちドア開可能ゾーン内であると判定すると(ステップS2のNO)、一連の処理を終了して、通常の運転制御を実行する。
ステップS4において、エレベータコントローラ7は、電動作動器10を待機状態に復帰させるために、モータコントローラ112に指令して、モータ37を正転および逆転する。エレベータコントローラ7は、ステップS4を実行すると、次に、ステップS5を実行する。
ステップS5において、エレベータコントローラ7は、可動子検出スイッチ109がオフ状態であるかを判定する。すなわち、エレベータコントローラ7は、電動作動器10の復帰動作が失敗したかを判定する。エレベータコントローラ7は、オフ状態であると判定すると(ステップS5のYES)、次にステップS6を実行し、オフ状態ではないと、すなわちオン状態であると判定すると(ステップS5のNO)、次にステップS2を実行する。なお、ステップS2以降の処理は、上述のとおりである。
ステップS6において、エレベータコントローラ7は、乗りかご1に設けられる荷重センサ(図示せず)や乗りかご1内に設けられるカメラからの信号に基づいて、乗りかご1内において乗客が検知されているかを判定する。エレベータコントローラ7は、乗客が検知されていると判定すると(ステップS6のYES)、次にステップS7を実行し、乗客が検知されていないと判定すると(ステップS6のNO)、ステップS7~S9をスキップして、次にステップS10を実行する。
ステップS7において、エレベータコントローラ7は、上述のステップS2と同様に、乗りかご1の停止位置がドア開可能ゾーン外であるかを判定する。エレベータコントローラ7は、ドア開可能ゾーン外であると判定すると(ステップS7のYES)、次にステップS8を実行し、ドア開可能ゾーン外ではないと、すなわちドア開可能ゾーン内であると判定すると(ステップS7のNO)、ステップS8をスキップして、次にステップS9を実行する。
ステップS8において、エレベータコントローラ7は、乗りかご1を、停止位置からドア開可能ゾーンまで上昇(UP)運転し、停止位置の上方の最寄り階に着床させる。エレベータコントローラ7は、ステップS8を実行すると、次にステップS9を実行する。
ステップS9において、エレベータコントローラ7は、乗りかご1に設けられるドア駆動装置(図示せず)を制御して、かごドアおよび乗場ドア(図示せず)を開く。さらに、エレベータコントローラ7は、かごドアスイッチ(図示せず)がドア開を検出してから所定時間が経過したら、ドア駆動装置(図示せず)を制御して、かごドアおよび乗場ドア(図示せず)を閉める。これにより、乗りかご1内の乗客が、最寄り階で降車することができる。エレベータコントローラ7は、ステップS9を実行すると、次に、ステップS10を実行する。
ステップS10において、エレベータコントローラ7は、ステップS4と同様に、モータ37を正転および逆転する。すなわち、エレベータコントローラ7は、再度、電動作動器10を復帰動作させる。エレベータコントローラ7は、ステップS10を実行すると、次に、ステップS11を実行する。
ステップS11において、エレベータコントローラ7は、可動子検出スイッチ109がオフ状態であるかを判定する。すなわち、エレベータコントローラ7は、再度、電動作動器10の復帰動作が失敗したかを判定する。エレベータコントローラ7は、オフ状態であると判定すると(ステップS11のYES)、次にステップS12を実行し、オフ状態ではないと、すなわちオン状態であると判定すると(ステップS11のNO)、次にステップS2を実行する。なお、ステップS2以降の処理は、上述のとおりである。
ステップS12において、エレベータコントローラ7は、乗りかご1の運転制御を休止する。すなわち、エレベータコントローラ7は、制御対象であるエレベータ装置の運転を休止する。エレベータコントローラ7は、ステップS12を実行すると、次に、ステップS13を実行する。
ステップS13において、エレベータコントローラ7は、エレベータ装置の稼働状態を遠隔監視している管制センターの監視用サーバに、異常発報を送信する。
エレベータコントローラ7は、ステップS13を実行すると、一連の処理を終了し、エレベータ装置の運転休止状態を保持する。
上述のように、本実施例によれば、電動作動器10によって動作する非常止め装置2を備えるエレベータ装置が、停電時運転機能を有することができる。本停電運転機能により、停電発生後に電動作動器10が復帰動作に失敗しても、乗りかご1を停電時に停止した位置から最寄り階へ運転することができる。
なお、本実施例は、復電時に限らず、停電時に蓄電池を電源として乗りかご1を運転する場合にも適用できる。
なお、本発明は前述した実施例に限定されるものではなく、様々な変形例が含まれる。例えば、前述した実施例は本発明を分かりやすく説明するために詳細に説明したものであり、必ずしも説明した全ての構成を備えるものに限定されるものではない。また、実施例の構成の一部について、他の構成の追加・削除・置き換えをすることが可能である。
例えば、可動子検出スイッチ109に代えて、他の位置検出センサ、例えば、光電式位置センサ、磁気式位置センサ、近接センサ(容量型、誘導型)などを適用してもよい。
また、電動作動器10は、乗りかご1の上方部のほか、下方部や側方部に設けられてもよい。
また、エレベータ装置は、機械室を有するものでもよいし、機械室を有しないいわゆる機械室レスエレベータでもよい。
1…乗りかご、2…非常止め装置、4…ガイドレール、5…ローラ、6…回転検出器、7…エレベータコントローラ、10…電動作動器、11…操作レバー、12…駆動軸、13…駆動ばね、14…固定部、15…押圧部材、16…第1の作動片、17…接続片、18…第2の作動片、19…第1の作動軸、20…第2の作動軸、21…引上げロッド、30…筐体、34a…吸着部、34b…支持部、34c…カム部、35a,35b…電磁石、36…送りねじ、37…モータ、38…接続ブラケット、39…電磁石支持板、41…支持部材、50…クロスヘッド、103…安全コントローラ、104a,105a,104b,105b…電気接点、106a,106b…信号線、107a,107b…フューズ、109…可動子検出スイッチ、111…直流電源、112…モータコントローラ
Claims (8)
- 乗りかごと、
前記乗りかごに設けられる非常止め装置と、
前記非常止め装置を駆動する駆動機構と、
前記駆動機構を作動させる電動作動器と、
前記乗りかごの運転を制御する制御装置と、
を備えるエレベータ装置において、
前記電動作動器は、
前記駆動機構と機械的に接続される可動子と、
前記可動子と対向する電磁石と、
モータの回転を前記電磁石の直線的移動に変換する機構部と、
を備え、
前記制御装置は、
停電に伴い前記電動作動器が作動したと判定すると、
前記電動作動器に、前記機構部によって前記可動子を待機位置に戻す復帰動作を指令し、
前記復帰動作が失敗したと判定すると、前記乗りかごを、上昇運転し、前記乗りかごの停止位置から上方の最寄り階に着床させることを特徴とするエレベータ装置。 - 請求項1に記載のエレベータ装置において、
前記制御装置は、前記復帰動作が成功したと判定すると、前記乗りかごを、下降運転し、前記乗りかごの前記停止位置から下方の前記最寄り階に着床させることを特徴とするエレベータ装置。 - 請求項1に記載のエレベータ装置において、
前記可動子の位置を検出する位置検出器を備え、
前記制御装置は、前記位置検出器からの位置検出信号に基づいて、前記停電に伴い前記電動作動器が作動したかを判定することを特徴とするエレベータ装置。 - 請求項1に記載のエレベータ装置において、
前記可動子の位置を検出する位置検出器を備え、
前記制御装置は、前記位置検出器からの位置検出信号に基づいて、前記復帰動作が失敗したかを判定することを特徴とするエレベータ装置。 - 請求項1に記載のエレベータ装置において、
前記制御装置は、
前記復帰動作が失敗したと判定すると、次に、前記乗りかごの停止位置がドア開可能ゾーン外であるかを判定し、
前記停止位置がドア開可能ゾーン外であると判定すると、前記乗りかごを、上昇運転させ、前記最寄り階に着床させることを特徴とするエレベータ装置。 - 請求項5に記載のエレベータ装置において、
前記制御装置は、前記停止位置が前記ドア開可能ゾーン外ではないと判定すると、かごドアおよび乗場ドアを開くことを特徴とするエレベータ装置。 - 請求項1に記載のエレベータ装置において、
前記制御装置は、
前記復帰動作が失敗したと判定すると、次に、乗客が検知されているかを判定し、
乗客が検知されていると判定すると、前記乗りかごを、上昇運転させ、前記最寄り階に着床させることを特徴とするエレベータ装置。 - 請求項7に記載のエレベータ装置において、
前記制御装置は、
前記乗客が検知されていないと判定すると、
前記電動作動器に、再度、前記復帰動作を指令し、
前記復帰動作が再度失敗したと判定すると、前記乗りかごの運転制御を休止することを特徴とするエレベータ装置。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2022/012387 WO2023175856A1 (ja) | 2022-03-17 | 2022-03-17 | エレベータ装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2023175856A1 JPWO2023175856A1 (ja) | 2023-09-21 |
| JP7545007B2 true JP7545007B2 (ja) | 2024-09-03 |
Family
ID=88022584
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2024507364A Active JP7545007B2 (ja) | 2022-03-17 | 2022-03-17 | エレベータ装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US12492101B2 (ja) |
| EP (1) | EP4495041A4 (ja) |
| JP (1) | JP7545007B2 (ja) |
| CN (1) | CN118843592A (ja) |
| WO (1) | WO2023175856A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7524487B2 (ja) * | 2021-10-07 | 2024-07-29 | 株式会社日立製作所 | 非常止め装置用電動作動器の故障検出装置および故障検出方法 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022038656A1 (ja) | 2020-08-17 | 2022-02-24 | 株式会社日立製作所 | エレベータ装置 |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0723769U (ja) | 1993-10-05 | 1995-05-02 | 株式会社日立ビルシステムサービス | 油圧エレベータの制御装置 |
| JP3532349B2 (ja) | 1996-06-11 | 2004-05-31 | 三菱電機株式会社 | エレベータの安全装置 |
| JP4044035B2 (ja) | 2003-12-26 | 2008-02-06 | 三菱電機株式会社 | エレベータの安全装置 |
| WO2007060733A1 (ja) * | 2005-11-25 | 2007-05-31 | Mitsubishi Denki Kabushiki Kaisha | エレベーターの非常停止システム |
| CN104444689B (zh) * | 2014-11-18 | 2016-08-17 | 苏州通润驱动设备股份有限公司 | 一种曳引轮安全保护装置及其紧急制停电梯轿厢的方法 |
| EP3216735A1 (en) * | 2016-03-10 | 2017-09-13 | Inventio AG | Pulsed opening of elevator brake enabling passenger evacuation |
| DE102017110256A1 (de) * | 2017-05-11 | 2018-11-15 | Thyssenkrupp Ag | Sicherheitseinrichtung für eine Aufzugsanlage, Aufzugsanlage und Verfahren zum Betreiben einer Sicherheitseinrichtung |
| EP3549896A1 (en) * | 2018-04-06 | 2019-10-09 | KONE Corporation | Resetting device for resetting an actuator for actuating a safety gear of an elevator |
| EP3617120B1 (en) * | 2018-08-30 | 2024-07-24 | Otis Elevator Company | Elevator electrical safety actuator control |
| EP3643666B1 (en) * | 2018-10-26 | 2021-04-28 | Otis Elevator Company | Elevator system |
| JP7204448B2 (ja) * | 2018-11-28 | 2023-01-16 | 株式会社日立製作所 | 非常止め装置及びエレベーター |
| JP7157718B2 (ja) * | 2019-09-06 | 2022-10-20 | 株式会社日立製作所 | 非常止め装置及びエレベーター |
| JP7319878B2 (ja) | 2019-09-18 | 2023-08-02 | 株式会社日立製作所 | エレベーター及びエレベーターの制御方法 |
| EP3845480A1 (de) * | 2019-12-31 | 2021-07-07 | Inventio AG | Verfahren zum bewegen einer aufzugskabine eines aufzugs zum evakuieren von passagieren und bremsöffnungsvorrichtung zum bewegen einer aufzugskabine eines aufzugs |
| JP7292230B2 (ja) | 2020-02-20 | 2023-06-16 | 株式会社日立製作所 | 非常止め装置及びエレベーター |
| KR20230162938A (ko) * | 2021-03-31 | 2023-11-29 | 인벤티오 아게 | 엘리베이터용 브레이크 시스템 |
-
2022
- 2022-03-17 WO PCT/JP2022/012387 patent/WO2023175856A1/ja not_active Ceased
- 2022-03-17 CN CN202280093349.7A patent/CN118843592A/zh active Pending
- 2022-03-17 EP EP22932130.2A patent/EP4495041A4/en active Pending
- 2022-03-17 US US18/834,406 patent/US12492101B2/en active Active
- 2022-03-17 JP JP2024507364A patent/JP7545007B2/ja active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022038656A1 (ja) | 2020-08-17 | 2022-02-24 | 株式会社日立製作所 | エレベータ装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US12492101B2 (en) | 2025-12-09 |
| EP4495041A4 (en) | 2025-12-31 |
| EP4495041A1 (en) | 2025-01-22 |
| CN118843592A (zh) | 2024-10-25 |
| JPWO2023175856A1 (ja) | 2023-09-21 |
| US20250136411A1 (en) | 2025-05-01 |
| WO2023175856A1 (ja) | 2023-09-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7212201B2 (ja) | エレベータ装置 | |
| JP7524487B2 (ja) | 非常止め装置用電動作動器の故障検出装置および故障検出方法 | |
| JP2007521203A (ja) | エレベータ用の遠隔リセット可能なロープ無し非常停止装置 | |
| JP7554945B2 (ja) | 非常止め装置用電動作動器の動作確認装置および動作確認方法 | |
| JP7319473B2 (ja) | エレベータ装置 | |
| JP7545007B2 (ja) | エレベータ装置 | |
| JP7522325B2 (ja) | エレベータ装置 | |
| JP2005126183A (ja) | エレベータのブレーキ制御装置 | |
| WO2024142155A1 (ja) | エレベータ装置 | |
| JP7575623B2 (ja) | 非常止め装置用電動作動器の点検装置 | |
| CN100500543C (zh) | 电梯控制装置 | |
| CN111646335A (zh) | 用于控制电梯的方法 | |
| WO2021014559A1 (ja) | エレベータ装置 | |
| WO2025120747A1 (ja) | エレベータ装置、並びにエレベータ装置の制御方法 | |
| WO2025120740A1 (ja) | エレベータ装置、並びにエレベータ装置の制御方法 | |
| WO2025238800A1 (ja) | エレベータ装置、並びにエレベータ装置の制御方法 | |
| WO2025115097A1 (ja) | エレベータ装置およびエレベータ制御方法 | |
| EP4549359A1 (en) | Elevator device | |
| WO2024252606A1 (ja) | エレベータ装置 | |
| JP2025104878A (ja) | エレベータの安全システム、並びにエレベータ | |
| HK40030800A (en) | A method for controlling an elevator | |
| WO2025191633A1 (ja) | エレベータ装置、並びにエレベータ装置の保守方法 | |
| WO2023037538A1 (ja) | エレベータ装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240426 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240806 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240822 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7545007 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |