JP7545196B2 - 制御装置、学習モデルの生成方法、学習モデル、コンピュータプログラム、および記憶媒体 - Google Patents
制御装置、学習モデルの生成方法、学習モデル、コンピュータプログラム、および記憶媒体 Download PDFInfo
- Publication number
- JP7545196B2 JP7545196B2 JP2019016109A JP2019016109A JP7545196B2 JP 7545196 B2 JP7545196 B2 JP 7545196B2 JP 2019016109 A JP2019016109 A JP 2019016109A JP 2019016109 A JP2019016109 A JP 2019016109A JP 7545196 B2 JP7545196 B2 JP 7545196B2
- Authority
- JP
- Japan
- Prior art keywords
- human
- powered vehicle
- information
- output
- control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images













Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62J—CYCLE SADDLES OR SEATS; AUXILIARY DEVICES OR ACCESSORIES SPECIALLY ADAPTED TO CYCLES AND NOT OTHERWISE PROVIDED FOR, e.g. ARTICLE CARRIERS OR CYCLE PROTECTORS
- B62J45/00—Electrical equipment arrangements specially adapted for use as accessories on cycles, not otherwise provided for
- B62J45/20—Cycle computers as cycle accessories
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62J—CYCLE SADDLES OR SEATS; AUXILIARY DEVICES OR ACCESSORIES SPECIALLY ADAPTED TO CYCLES AND NOT OTHERWISE PROVIDED FOR, e.g. ARTICLE CARRIERS OR CYCLE PROTECTORS
- B62J1/00—Saddles or other seats for cycles; Arrangement thereof; Component parts
- B62J1/08—Frames for saddles; Connections between saddle frames and seat pillars; Seat pillars
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62J—CYCLE SADDLES OR SEATS; AUXILIARY DEVICES OR ACCESSORIES SPECIALLY ADAPTED TO CYCLES AND NOT OTHERWISE PROVIDED FOR, e.g. ARTICLE CARRIERS OR CYCLE PROTECTORS
- B62J45/00—Electrical equipment arrangements specially adapted for use as accessories on cycles, not otherwise provided for
- B62J45/40—Sensor arrangements; Mounting thereof
- B62J45/41—Sensor arrangements; Mounting thereof characterised by the type of sensor
- B62J45/411—Torque sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62J—CYCLE SADDLES OR SEATS; AUXILIARY DEVICES OR ACCESSORIES SPECIALLY ADAPTED TO CYCLES AND NOT OTHERWISE PROVIDED FOR, e.g. ARTICLE CARRIERS OR CYCLE PROTECTORS
- B62J45/00—Electrical equipment arrangements specially adapted for use as accessories on cycles, not otherwise provided for
- B62J45/40—Sensor arrangements; Mounting thereof
- B62J45/41—Sensor arrangements; Mounting thereof characterised by the type of sensor
- B62J45/412—Speed sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62J—CYCLE SADDLES OR SEATS; AUXILIARY DEVICES OR ACCESSORIES SPECIALLY ADAPTED TO CYCLES AND NOT OTHERWISE PROVIDED FOR, e.g. ARTICLE CARRIERS OR CYCLE PROTECTORS
- B62J45/00—Electrical equipment arrangements specially adapted for use as accessories on cycles, not otherwise provided for
- B62J45/40—Sensor arrangements; Mounting thereof
- B62J45/41—Sensor arrangements; Mounting thereof characterised by the type of sensor
- B62J45/413—Rotation sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62J—CYCLE SADDLES OR SEATS; AUXILIARY DEVICES OR ACCESSORIES SPECIALLY ADAPTED TO CYCLES AND NOT OTHERWISE PROVIDED FOR, e.g. ARTICLE CARRIERS OR CYCLE PROTECTORS
- B62J45/00—Electrical equipment arrangements specially adapted for use as accessories on cycles, not otherwise provided for
- B62J45/40—Sensor arrangements; Mounting thereof
- B62J45/41—Sensor arrangements; Mounting thereof characterised by the type of sensor
- B62J45/414—Acceleration sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62J—CYCLE SADDLES OR SEATS; AUXILIARY DEVICES OR ACCESSORIES SPECIALLY ADAPTED TO CYCLES AND NOT OTHERWISE PROVIDED FOR, e.g. ARTICLE CARRIERS OR CYCLE PROTECTORS
- B62J45/00—Electrical equipment arrangements specially adapted for use as accessories on cycles, not otherwise provided for
- B62J45/40—Sensor arrangements; Mounting thereof
- B62J45/41—Sensor arrangements; Mounting thereof characterised by the type of sensor
- B62J45/415—Inclination sensors
- B62J45/4151—Inclination sensors for sensing lateral inclination of the cycle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62J—CYCLE SADDLES OR SEATS; AUXILIARY DEVICES OR ACCESSORIES SPECIALLY ADAPTED TO CYCLES AND NOT OTHERWISE PROVIDED FOR, e.g. ARTICLE CARRIERS OR CYCLE PROTECTORS
- B62J45/00—Electrical equipment arrangements specially adapted for use as accessories on cycles, not otherwise provided for
- B62J45/40—Sensor arrangements; Mounting thereof
- B62J45/41—Sensor arrangements; Mounting thereof characterised by the type of sensor
- B62J45/415—Inclination sensors
- B62J45/4152—Inclination sensors for sensing longitudinal inclination of the cycle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62J—CYCLE SADDLES OR SEATS; AUXILIARY DEVICES OR ACCESSORIES SPECIALLY ADAPTED TO CYCLES AND NOT OTHERWISE PROVIDED FOR, e.g. ARTICLE CARRIERS OR CYCLE PROTECTORS
- B62J45/00—Electrical equipment arrangements specially adapted for use as accessories on cycles, not otherwise provided for
- B62J45/40—Sensor arrangements; Mounting thereof
- B62J45/41—Sensor arrangements; Mounting thereof characterised by the type of sensor
- B62J45/416—Physiological sensors, e.g. heart rate sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62J—CYCLE SADDLES OR SEATS; AUXILIARY DEVICES OR ACCESSORIES SPECIALLY ADAPTED TO CYCLES AND NOT OTHERWISE PROVIDED FOR, e.g. ARTICLE CARRIERS OR CYCLE PROTECTORS
- B62J50/00—Arrangements specially adapted for use on cycles not provided for in main groups B62J1/00 - B62J45/00
- B62J50/20—Information-providing devices
- B62J50/21—Information-providing devices intended to provide information to rider or passenger
- B62J50/22—Information-providing devices intended to provide information to rider or passenger electronic, e.g. displays
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62K—CYCLES; CYCLE FRAMES; CYCLE STEERING DEVICES; RIDER-OPERATED TERMINAL CONTROLS SPECIALLY ADAPTED FOR CYCLES; CYCLE AXLE SUSPENSIONS; CYCLE SIDE-CARS, FORECARS, OR THE LIKE
- B62K25/00—Axle suspensions
- B62K25/04—Axle suspensions for mounting axles resiliently on cycle frame or fork
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62K—CYCLES; CYCLE FRAMES; CYCLE STEERING DEVICES; RIDER-OPERATED TERMINAL CONTROLS SPECIALLY ADAPTED FOR CYCLES; CYCLE AXLE SUSPENSIONS; CYCLE SIDE-CARS, FORECARS, OR THE LIKE
- B62K25/00—Axle suspensions
- B62K25/04—Axle suspensions for mounting axles resiliently on cycle frame or fork
- B62K25/06—Axle suspensions for mounting axles resiliently on cycle frame or fork with telescopic fork, e.g. including auxiliary rocking arms
- B62K25/08—Axle suspensions for mounting axles resiliently on cycle frame or fork with telescopic fork, e.g. including auxiliary rocking arms for front wheel
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62J—CYCLE SADDLES OR SEATS; AUXILIARY DEVICES OR ACCESSORIES SPECIALLY ADAPTED TO CYCLES AND NOT OTHERWISE PROVIDED FOR, e.g. ARTICLE CARRIERS OR CYCLE PROTECTORS
- B62J1/00—Saddles or other seats for cycles; Arrangement thereof; Component parts
- B62J1/08—Frames for saddles; Connections between saddle frames and seat pillars; Seat pillars
- B62J2001/085—Seat pillars having mechanisms to vary seat height, independently of the cycle frame
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62K—CYCLES; CYCLE FRAMES; CYCLE STEERING DEVICES; RIDER-OPERATED TERMINAL CONTROLS SPECIALLY ADAPTED FOR CYCLES; CYCLE AXLE SUSPENSIONS; CYCLE SIDE-CARS, FORECARS, OR THE LIKE
- B62K25/00—Axle suspensions
- B62K25/04—Axle suspensions for mounting axles resiliently on cycle frame or fork
- B62K2025/044—Suspensions with automatic adjustment
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Biophysics (AREA)
- Cardiology (AREA)
- General Health & Medical Sciences (AREA)
- Heart & Thoracic Surgery (AREA)
- Physiology (AREA)
- Axle Suspensions And Sidecars For Cycles (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Vehicle Body Suspensions (AREA)
Description
このため、人力駆動車の走行に関する多様な入力情報に基づく様々なシチュエーションまたは走行環境に合わせた伸縮機構の自動制御が実現される。
このため、人力駆動車の走行に関する多様な入力情報に基づく様々なシチュエーションまたは走行環境に合わせた前記人力駆動車のサスペンションの自動制御が実現される。
このため、人力駆動車の走行に関し、可動部材に設けられた加速度センサから得られる振動に関する情報に基づく路面状況に合わせたサスペンションの自動制御が実現される。
このため、人力駆動車の走行に関し、路面状況に合わせつつも振動の吸収を適切な範囲内とするサスペンションの自動制御が実現される。
このため、人力駆動車の走行に関する多様な入力情報に基づく様々なシチュエーションまたは走行環境に合わせた前記人力駆動車のシートポストの自動制御が実現される。
このため、人力駆動車の走行に関し、走行環境に合わせた伸縮機構の適切な自動制御が実現される。
このため、人力駆動車の走行に関する多様な入力情報に基づく様々なシチュエーションまたは走行環境に合わせた伸縮機構の自動制御が実現される。
このため、人力駆動車の走行に関する多様な入力情報に基づく様々なシチュエーションまたは走行環境に合わせた伸縮機構の自動制御が実現される。
このため、人力駆動車の走行に関する多様な入力情報に基づく様々なシチュエーションまたは走行環境に合わせた伸縮機構の制御内容をユーザに認識させ、違和感を生じさせない自動制御が実現される。
このため、人力駆動車の乗り手であるユーザの運転特性、嗜好に合った伸縮機構の自動制御が実現される。
このため、人力駆動車の乗り手であるユーザの運転特性、嗜好に合った伸縮機構の自動制御が実現される。
このため、人力駆動車の乗り手であるユーザの運転特性、嗜好に基づく操作内容に合った伸縮機構の自動制御が実現される。
このため、人力駆動車の走行コースに適合した多様な入力情報に基づく様々なシチュエーションまたは走行環境に応じた伸縮機構の自動制御が実現される。
このため、人力駆動車の走行に関する多様な入力情報に基づき伸縮機構を制御するための出力情報を、様々なシチュエーションまたは走行環境に合わせて出力するように学習モデルが生成される。学習モデルから出力される出力情報を用いることにより、シチュエーションまたは走行環境に応じて適切な自動制御が実現される。
このため、人力駆動車の走行に関する多様な入力情報に基づき伸縮機構を制御するための出力情報を出力する学習済みの学習モデルを用いてシチュエーションまたは走行環境に応じて適切な自動制御が実現される。
このため、コンピュータにより人力駆動車の走行に関する多様な入力情報に基づき伸縮機構を制御するための出力情報を、様々なシチュエーションまたは走行環境に合わせて出力するように学習モデルが生成される。学習モデルから出力される出力情報を用いることにより、シチュエーションまたは走行環境に応じて適切な自動制御が実現される。
このため、記憶媒体からコンピュータによって読み出されるコンピュータプログラムに基づいて前記コンピュータは、人力駆動車の走行に関する多様な入力情報に基づき伸縮機構を制御するための出力情報を、様々なシチュエーションまたは走行環境に合わせて出力するように学習モデルを生成することができる。
図1は、第1実施形態の制御装置が適用される人力駆動車Aの側面図である。人力駆動車Aは、電気エネルギーを用いて人力駆動車Aの推進をアシストするアシスト機構Cを含むロードバイクである。人力駆動車Aの構成は、任意に変更可能である。第1例では、人力駆動車Aはアシスト機構Cを含まない。第2例では、人力駆動車Aの種類は、シティサイクル、マウンテンバイク、または、クロスバイクである。第3例では、人力駆動車Aは、第1例および第2例の特徴を含む。
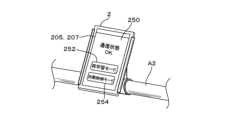
第2実施形態では、制御ユニット100に代替して、ユーザの端末装置にて学習モデル1Mを作成し、コンポーネントの制御情報を出力する処理を実行する。図9は、第2実施形態の制御システム200の構成を示すブロック図である。制御システム200は、端末装置2と制御ユニット100とを含む。第2実施形態における制御ユニット100は、制御部11、記憶部12、入出力部14および通信部16を含む。第2実施形態における制御ユニット100の構成部の内、第1実施形態における制御ユニット100と共通する構成には同一の符号を付して詳細な説明を省略する。
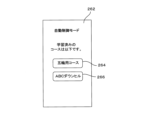
第3実施形態における制御システム200の構成は、学習モデル2Mが、人力駆動車Aが走行する走行コース別に準備されている点を除いては、第2実施形態における構成と同様である。第3実施形態における制御システム200の構成の内、第1実施形態または第2実施形態における構成と共通する構成には同一の符号を付して詳細な説明を省略する。
Claims (14)
- 人力駆動車の走行に関する前記人力駆動車の走行情報および前記人力駆動車の走行環境情報を含む入力情報に応じて学習モデルによって出力される伸縮機構の制御に関する出力情報に基づいて前記伸縮機構を制御する制御部を備える、制御装置であって、
前記走行情報は、前記人力駆動車のクランクのケイデンス、前記人力駆動車の荷重バランス、前記人力駆動車のギア比、前記人力駆動車のブレーキの操作量、ユーザの身体情報、のうちの少なくともいずれか1つを含み、
前記人力駆動車の走行環境情報は、車輪の接地状態、および、天候、の少なくともいずれか1つを含む、制御装置。 - 前記制御部は、前記伸縮機構の制御内容を、ユーザへ報知する報知部へ出力する、請求項1に記載の制御装置。
- 前記伸縮機構は、前記人力駆動車のサスペンションであり、
前記出力情報は、ストローク長、ロックアウト状態、バネ力、ダンピングレートの内の少なくともいずれか1つを含む、請求項1又は2に記載の制御装置。 - 前記サスペンションは、第1部材と、前記第1部材に対して移動可能に設けられる第2部材とを含み、
前記入力情報は、前記第1部材に取り付けられる第1加速度センサによって出力される第1加速度と、前記第2部材に取り付けられる第2加速度センサによって出力される第2加速度とを含む、請求項3に記載の制御装置。 - 前記学習モデルは、第1加速度と第2加速度との差が所定範囲になるように前記出力情報を出力する、請求項4に記載の制御装置。
- 前記伸縮機構は、前記人力駆動車のシートポストであり、
前記出力情報は、シート高さ、座面の傾き、前後位置、および左右位置、の内の少なくともいずれか1つを含む、請求項1又は2に記載の制御装置。 - 前記出力情報を評価する評価部を備え、
前記評価部の評価に基づいて前記学習モデルを更新する、請求項1~6のいずれか一項に記載の制御装置。 - 前記評価部は、前記制御部による前記伸縮機構の制御後の前記入力情報である制御後入力情報に基づいて前記出力情報を評価する、請求項7に記載の制御装置。
- 前記出力情報に関する指定操作を受け付ける操作部を備え、
前記制御後入力情報に基づいて前記学習モデルから出力される制御後出力情報と、前記指定操作との比較に基づいて前記出力情報を評価する、請求項8に記載の制御装置。 - 前記学習モデルは、前記人力駆動車が走行する走行コース別に準備されており、
走行コースの選択を受け付け、
前記制御部は、選択された走行コースに対応する前記学習モデルによって前記入力情報に応じて出力される前記出力情報に基づいて前記伸縮機構を制御する、請求項1~9のいずれか一項に記載の制御装置。 - 人力駆動車の走行に関する前記人力駆動車のクランクのケイデンス、前記人力駆動車の荷重バランス、前記人力駆動車のギア比、前記人力駆動車のブレーキの操作量、ユーザの身体情報、のうちの少なくともいずれか1つを含む前記人力駆動車の走行情報、および、車輪の接地状態、および、天候、の少なくともいずれか1つを含む前記人力駆動車の走行環境情報を含む入力情報が入力された場合に、前記人力駆動車のコンポーネントの内、伸縮機構の制御に関する出力情報を出力するニューラルネットワークを用い、
前記人力駆動車の走行に関する入力情報を取得し、
取得した前記入力情報を前記ニューラルネットワークへ与えることによって出力された出力情報を特定し、
特定された前記出力情報に基づいて前記伸縮機構を制御した場合に、前記人力駆動車の走行状態の評価を向上させるように前記ニューラルネットワークの中間層におけるパラメータをコンピュータによって学習する、学習モデルの生成方法。 - 人力駆動車の走行に関する前記人力駆動車のクランクのケイデンス、前記人力駆動車の荷重バランス、前記人力駆動車のギア比、前記人力駆動車のブレーキの操作量、ユーザの身体情報、のうちの少なくともいずれか1つを含む前記人力駆動車の走行情報、および、車輪の接地状態、および、天候、の少なくともいずれか1つを含む前記人力駆動車の走行環境情報を含む入力情報を入力する入力層と、
前記人力駆動車のコンポーネントの内、伸縮機構を有する部分の制御に関する出力情報を出力する出力層と、
前記出力層から出力された前記出力情報に基づいて前記部分を制御した場合に、前記人力駆動車の走行状態の評価を向上させるように学習されたパラメータを有する中間層を備え、
前記入力情報が前記入力層に入力された場合に前記中間層で演算を行ない、前記部分の制御に関する前記出力情報を前記出力層から出力する、学習モデル。 - 人力駆動車の走行に関する前記人力駆動車のクランクのケイデンス、前記人力駆動車の荷重バランス、前記人力駆動車のギア比、前記人力駆動車のブレーキの操作量、ユーザの身体情報、のうちの少なくともいずれか1つを含む前記人力駆動車の走行情報、および、車輪の接地状態、および、天候、の少なくともいずれか1つを含む前記人力駆動車の走行環境情報を含む入力情報が入力された場合に、前記人力駆動車のコンポーネントの内、伸縮機構を有する部分の制御に関する出力情報を出力するニューラルネットワークを用い、
前記人力駆動車の走行に関する入力情報を取得し、
取得した前記入力情報を前記ニューラルネットワークへ与えることによって出力された出力情報を特定し、
特定された前記出力情報に基づいて前記部分を制御した場合に、前記人力駆動車の乗員の快適さの評価を向上させるように前記ニューラルネットワークの中間層におけるパラメータを学習する処理を、コンピュータに実行させるコンピュータプログラム。 - 請求項13に記載のコンピュータプログラムが記憶される記憶媒体。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019016109A JP7545196B2 (ja) | 2019-01-31 | 2019-01-31 | 制御装置、学習モデルの生成方法、学習モデル、コンピュータプログラム、および記憶媒体 |
| US16/750,255 US11866114B2 (en) | 2019-01-31 | 2020-01-23 | Control device, creation method for learning model, learning model, computer program and storage medium |
| DE102020102300.6A DE102020102300A1 (de) | 2019-01-31 | 2020-01-30 | Steuervorrichtugng, erstellungsverfahren für trainiertes modell für maschinelles lernen, trainiertes modell für maschinelles lernen, computerprogramm und speichermedium |
| JP2023080256A JP7792372B2 (ja) | 2019-01-31 | 2023-05-15 | 制御装置、学習モデルの学習方法、学習モデル、コンピュータプログラム、および記憶媒体 |
| JP2024194619A JP2025013547A (ja) | 2019-01-31 | 2024-11-06 | 制御装置、学習モデルの学習方法、コンピュータプログラム、および記憶媒体 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019016109A JP7545196B2 (ja) | 2019-01-31 | 2019-01-31 | 制御装置、学習モデルの生成方法、学習モデル、コンピュータプログラム、および記憶媒体 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023080256A Division JP7792372B2 (ja) | 2019-01-31 | 2023-05-15 | 制御装置、学習モデルの学習方法、学習モデル、コンピュータプログラム、および記憶媒体 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020121695A JP2020121695A (ja) | 2020-08-13 |
| JP7545196B2 true JP7545196B2 (ja) | 2024-09-04 |
Family
ID=71615454
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019016109A Active JP7545196B2 (ja) | 2019-01-31 | 2019-01-31 | 制御装置、学習モデルの生成方法、学習モデル、コンピュータプログラム、および記憶媒体 |
| JP2023080256A Active JP7792372B2 (ja) | 2019-01-31 | 2023-05-15 | 制御装置、学習モデルの学習方法、学習モデル、コンピュータプログラム、および記憶媒体 |
| JP2024194619A Pending JP2025013547A (ja) | 2019-01-31 | 2024-11-06 | 制御装置、学習モデルの学習方法、コンピュータプログラム、および記憶媒体 |
Family Applications After (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023080256A Active JP7792372B2 (ja) | 2019-01-31 | 2023-05-15 | 制御装置、学習モデルの学習方法、学習モデル、コンピュータプログラム、および記憶媒体 |
| JP2024194619A Pending JP2025013547A (ja) | 2019-01-31 | 2024-11-06 | 制御装置、学習モデルの学習方法、コンピュータプログラム、および記憶媒体 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11866114B2 (ja) |
| JP (3) | JP7545196B2 (ja) |
| DE (1) | DE102020102300A1 (ja) |
Families Citing this family (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11597470B2 (en) * | 2018-07-09 | 2023-03-07 | Shimano Inc. | Human-powered vehicle component, mobile electronic device, and equipment for human-powered vehicle |
| US11527980B2 (en) | 2018-07-09 | 2022-12-13 | Shimano Inc. | Electronic device and human-powered vehicle system |
| US11731723B2 (en) | 2018-07-09 | 2023-08-22 | Shimano Inc. | Rider recognition device for human-powered vehicle and control system of human-powered vehicle |
| US11527981B2 (en) | 2018-07-09 | 2022-12-13 | Shimano Inc. | Human-powered vehicle control device, electronic device, and human-powered vehicle control system |
| US11174922B2 (en) | 2019-02-26 | 2021-11-16 | Fallbrook Intellectual Property Company Llc | Reversible variable drives and systems and methods for control in forward and reverse directions |
| CH716006A2 (de) * | 2019-03-28 | 2020-09-30 | Bmc Switzerland Ag | Verstellbare Sattelstützenanordnung. |
| JP7324632B2 (ja) * | 2019-07-12 | 2023-08-10 | 株式会社シマノ | 出力装置、学習モデルの生成方法、およびコンピュータプログラム |
| JP7321873B2 (ja) * | 2019-10-09 | 2023-08-07 | 株式会社シマノ | 人力駆動車用の制御装置 |
| US20220161890A1 (en) * | 2020-11-20 | 2022-05-26 | Praxis Works LLC | Motor controller for electric bicycles |
| JP7566626B2 (ja) * | 2020-12-28 | 2024-10-15 | 株式会社シマノ | 人力駆動車用の制御装置および人力駆動車用の制御システム |
| EP4294712A4 (en) * | 2021-02-22 | 2025-01-08 | Fallbrook Intellectual Property Company LLC | AUTOMATIC CONTROL OF A MOTOR-ASSISTED BICYCLE TO ACHIEVE A CYCLIST'S DESIRED ROUTE OBJECTIVE |
| US12263708B2 (en) * | 2021-02-22 | 2025-04-01 | Harley-Davidson Motor Company, Inc. | Vehicle adaptive ride height system and method of controlling a vehicle |
| JP7714376B2 (ja) * | 2021-05-17 | 2025-07-29 | 株式会社シマノ | 人力駆動車用の制御装置 |
| JP2023042277A (ja) * | 2021-09-14 | 2023-03-27 | 株式会社シマノ | 人力駆動車用制御装置 |
| DE202021105290U1 (de) * | 2021-09-30 | 2023-01-10 | Canyon Bicycles Gmbh | Betätigungseinrichtung für ein höhenverstellbares Sattelstützrohr |
| JP2023085936A (ja) * | 2021-12-09 | 2023-06-21 | 株式会社シマノ | 人力駆動車用制御装置、学習モデルの作成方法、学習モデル、人力駆動車の制御方法、およびコンピュータプログラム |
| TWI793972B (zh) * | 2022-01-13 | 2023-02-21 | 國立勤益科技大學 | 自行車之座墊自動升降系統 |
| JP7801933B2 (ja) * | 2022-03-31 | 2026-01-19 | 株式会社シマノ | 人力駆動車用制御装置、学習方法、人力駆動車の制御方法、およびコンピュータプログラム |
| US12561608B2 (en) | 2022-06-03 | 2026-02-24 | Here Global B.V. | Apparatus and methods for predicting slipping events for micromobility vehicles |
| IT202300002664A1 (it) * | 2023-02-16 | 2024-08-16 | Bike & Gio Srl | Bicicletta elettrica |
| US12384213B2 (en) * | 2023-08-25 | 2025-08-12 | Fox Factory, Inc. | Hot-start suspension tune |
| US20250074529A1 (en) * | 2023-08-29 | 2025-03-06 | C-Tech United Corporation | Auxiliary assembly for bicycle |
| JP7719837B2 (ja) * | 2023-09-29 | 2025-08-06 | 本田技研工業株式会社 | 制御システム、鞍乗型車両、制御方法、およびプログラム |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20150197308A1 (en) | 2012-08-21 | 2015-07-16 | Befra Electronic, S.R.O | Electronically Controlled Suspension System, Method for Controlling a Suspension System and Computer Program |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3345930B2 (ja) * | 1993-01-06 | 2002-11-18 | 日産自動車株式会社 | アクティブコントロール装置 |
| JP2000207002A (ja) * | 1999-01-18 | 2000-07-28 | Yamaha Motor Co Ltd | ショックアブソ―バの最適制御方法 |
| JP2005538886A (ja) * | 2002-09-13 | 2005-12-22 | ヤマハ発動機株式会社 | 少なくされた数のセンサーを用いるファジー制御装置 |
| US8091910B2 (en) | 2009-06-29 | 2012-01-10 | Shimano, Inc. | Apparatus for controlling a bicycle suspension element |
| JP5402466B2 (ja) * | 2009-09-25 | 2014-01-29 | 株式会社アドヴィックス | 車両の状態検出装置、及び車両の状態安定化制御装置 |
| JP6012376B2 (ja) * | 2012-09-28 | 2016-10-25 | 本田技研工業株式会社 | 電動補助自転車の補助力制御装置 |
| DE102015107701A1 (de) * | 2015-05-18 | 2016-11-24 | Dt Swiss Ag | Fahrradkomponente, Fahrrad und Verfahren |
| DE202015104955U1 (de) | 2015-09-17 | 2015-10-08 | Shang-Hua Lai | Höheneinstellvorrichtung für Fahrradsattel |
| DE112016006670B4 (de) * | 2016-03-30 | 2024-10-02 | Kawasaki Motors, Ltd. | Einstellassistenzsystem eines Grätschsitz-Fahrzeugs |
| US10773764B2 (en) * | 2016-03-30 | 2020-09-15 | Kawasaki Jukogyo Kabushiki Kaisha | Processing system for straddle vehicle |
| DE102016218499A1 (de) | 2016-09-27 | 2018-03-29 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Einlernen einer automatisch arbeitenden Gangschaltung |
| JP7036535B2 (ja) | 2016-11-30 | 2022-03-15 | 株式会社シマノ | 電子装置および電子装置における制御方法 |
| CN106896723B (zh) | 2017-03-31 | 2019-08-13 | 浙江大学 | 一种自行车的智能自动变速控制系统 |
| US20180362114A1 (en) | 2017-06-14 | 2018-12-20 | Wen-Sung Lee | Control system of learning applications for electric bikes |
| TWI628093B (zh) * | 2017-06-29 | 2018-07-01 | 摩特動力工業股份有限公司 | Electronic variable suspension system |
| JP6967895B2 (ja) | 2017-07-05 | 2021-11-17 | ソフトバンク株式会社 | 生体情報管理方法、生体情報管理システム、体組成計及び携帯端末 |
| US11584473B2 (en) * | 2018-07-18 | 2023-02-21 | Shimano Inc. | Suspension control device for a human-powered vehicle |
| US20210323623A1 (en) * | 2020-04-16 | 2021-10-21 | Bond Mobility Inc. | Cycle vehicles with adjustable seat and handlebars |
| EP4294712A4 (en) * | 2021-02-22 | 2025-01-08 | Fallbrook Intellectual Property Company LLC | AUTOMATIC CONTROL OF A MOTOR-ASSISTED BICYCLE TO ACHIEVE A CYCLIST'S DESIRED ROUTE OBJECTIVE |
| US11345441B2 (en) * | 2021-07-05 | 2022-05-31 | Hazem Nihad Hamed | Automatic bicycle shifter and torque computation algorithm |
| US11603153B1 (en) * | 2022-01-10 | 2023-03-14 | Toyota Motor Engineering & Manufacturing North America, Inc. | Bicycle saddle with super elastic material member activated vibration isolation |
-
2019
- 2019-01-31 JP JP2019016109A patent/JP7545196B2/ja active Active
-
2020
- 2020-01-23 US US16/750,255 patent/US11866114B2/en active Active
- 2020-01-30 DE DE102020102300.6A patent/DE102020102300A1/de active Pending
-
2023
- 2023-05-15 JP JP2023080256A patent/JP7792372B2/ja active Active
-
2024
- 2024-11-06 JP JP2024194619A patent/JP2025013547A/ja active Pending
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20150197308A1 (en) | 2012-08-21 | 2015-07-16 | Befra Electronic, S.R.O | Electronically Controlled Suspension System, Method for Controlling a Suspension System and Computer Program |
Also Published As
| Publication number | Publication date |
|---|---|
| DE102020102300A8 (de) | 2020-11-05 |
| DE102020102300A1 (de) | 2020-08-06 |
| US11866114B2 (en) | 2024-01-09 |
| JP2025013547A (ja) | 2025-01-24 |
| JP7792372B2 (ja) | 2025-12-25 |
| JP2020121695A (ja) | 2020-08-13 |
| JP2023091087A (ja) | 2023-06-29 |
| US20200247498A1 (en) | 2020-08-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7792372B2 (ja) | 制御装置、学習モデルの学習方法、学習モデル、コンピュータプログラム、および記憶媒体 | |
| US11718359B2 (en) | Output device, method for generating a machine learning model, and computer program | |
| JP6985217B2 (ja) | 制御データ作成装置、コンポーネント制御装置、制御データ作成方法、コンポーネント制御方法、およびコンピュータプログラム | |
| US20250014393A1 (en) | Connected component platform | |
| US11912371B2 (en) | Human-powered vehicle component, mobile electronic device, and equipment for human-powered vehicle | |
| US11527981B2 (en) | Human-powered vehicle control device, electronic device, and human-powered vehicle control system | |
| US12195130B2 (en) | Connected component platform | |
| JP7007244B2 (ja) | 作成装置、コンポーネント制御装置、作成方法、コンポーネント制御方法、コンピュータプログラムおよび学習モデル | |
| US11527980B2 (en) | Electronic device and human-powered vehicle system | |
| JP2022176850A (ja) | 人力駆動車用の制御装置 | |
| JP6989452B2 (ja) | 作成装置、コンポーネント制御装置、作成方法、コンポーネント制御方法、およびコンピュータプログラム | |
| JP7193332B2 (ja) | 電子装置および人力駆動車用システム | |
| JP7626584B2 (ja) | 評価装置、制御システム、報知システム、学習モデルの生成方法、コンピュータプログラム、および、記憶媒体 | |
| JP7312549B2 (ja) | 人力駆動車用制御装置、電子装置、および、人力駆動車用制御システム | |
| EP4125068A1 (en) | Connected component platform | |
| JP2021062775A (ja) | 制御装置 | |
| US20250271866A1 (en) | Human-powered vehicle control device, method of controlling human-powered vehicle, and computer program | |
| US20250368285A1 (en) | System for predicting travel of human-powered vehicle and system for generating model for predicting travel of human-powered vehicle | |
| JP2025081129A (ja) | 人力駆動車制御装置、人力駆動車制御方法、及びコンピュータプログラム | |
| JP2023048907A (ja) | 人力駆動車用の制御装置 | |
| JP2025081130A (ja) | 人力駆動車制御装置、コンピュータプログラム、人力駆動車制御方法、人力駆動車制御データ設定方法、及び人力駆動車制御システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20211020 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20220725 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220830 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20221011 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20230221 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230515 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20230523 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20230728 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240823 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7545196 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |