JP7548249B2 - 地図管理システム及び地図管理方法 - Google Patents
地図管理システム及び地図管理方法 Download PDFInfo
- Publication number
- JP7548249B2 JP7548249B2 JP2022005898A JP2022005898A JP7548249B2 JP 7548249 B2 JP7548249 B2 JP 7548249B2 JP 2022005898 A JP2022005898 A JP 2022005898A JP 2022005898 A JP2022005898 A JP 2022005898A JP 7548249 B2 JP7548249 B2 JP 7548249B2
- Authority
- JP
- Japan
- Prior art keywords
- obstacle
- instruction
- map
- autonomous vehicle
- operator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
















Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0011—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots associated with a remote control arrangement
- G05D1/0044—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots associated with a remote control arrangement by providing the operator with a computer generated representation of the environment of the vehicle, e.g. virtual reality, maps
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0011—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots associated with a remote control arrangement
- G05D1/0038—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots associated with a remote control arrangement by providing the operator with simple or augmented images from one or more cameras located onboard the vehicle, e.g. tele-operation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
- B60W60/0015—Planning or execution of driving tasks specially adapted for safety
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/005—Handover processes
- B60W60/0059—Estimation of the risk associated with autonomous or manual driving, e.g. situation too complex, sensor failure or driver incapacity
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3804—Creation or updating of map data
- G01C21/3807—Creation or updating of map data characterised by the type of data
- G01C21/3811—Point data, e.g. Point of Interest [POI]
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3804—Creation or updating of map data
- G01C21/3833—Creation or updating of map data characterised by the source of data
- G01C21/3837—Data obtained from a single source
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3885—Transmission of map data to client devices; Reception of map data by client devices
- G01C21/3889—Transmission of selected map data, e.g. depending on route
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0268—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means
- G05D1/0274—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means using mapping information stored in a memory device
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/22—Command input arrangements
- G05D1/221—Remote-control arrangements
- G05D1/222—Remote-control arrangements operated by humans
- G05D1/224—Output arrangements on the remote controller, e.g. displays, haptics or speakers
- G05D1/2244—Optic
- G05D1/2245—Optic providing the operator with a purely computer-generated representation of the environment of the vehicle, e.g. virtual reality
- G05D1/2246—Optic providing the operator with a purely computer-generated representation of the environment of the vehicle, e.g. virtual reality displaying a map of the environment
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F16/00—Information retrieval; Database structures therefor; File system structures therefor
- G06F16/20—Information retrieval; Database structures therefor; File system structures therefor of structured data, e.g. relational data
- G06F16/29—Geographical information databases
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/77—Processing image or video features in feature spaces; using data integration or data reduction, e.g. principal component analysis [PCA] or independent component analysis [ICA] or self-organising maps [SOM]; Blind source separation
- G06V10/774—Generating sets of training patterns; Bootstrap methods, e.g. bagging or boosting
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/20—Static objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2756/00—Output or target parameters relating to data
- B60W2756/10—Involving external transmission of data to or from the vehicle
Landscapes
- Engineering & Computer Science (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Automation & Control Theory (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Human Computer Interaction (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Databases & Information Systems (AREA)
- General Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Health & Medical Sciences (AREA)
- Computing Systems (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Evolutionary Computation (AREA)
- General Health & Medical Sciences (AREA)
- Medical Informatics (AREA)
- Software Systems (AREA)
- Data Mining & Analysis (AREA)
- Artificial Intelligence (AREA)
- Traffic Control Systems (AREA)
- Navigation (AREA)
Description
地図管理システムは、
1又は複数のプロセッサと、
自動運転車両によって利用される地図情報を格納する1又は複数の記憶装置と
を備える。
自動運転車両は、地図情報に基づいて、障害物を検出する、あるいは、障害物の手前で停止する際のマージン距離を取得する。
自動運転車両は、障害物に対する行動に関して遠隔オペレータの判断が必要な場合、遠隔オペレータに支援を要求する支援要求を発行する。
1又は複数のプロセッサは、支援要求に応答して遠隔オペレータから自動運転車両に対して出されるオペレータ指示を取得する。
1又は複数のプロセッサは、オペレータ指示の取得状況、あるいは、オペレータ指示の内容に基づいて、障害物の種類を推定する。
そして、1又は複数のプロセッサは、障害物の種類に応じて地図情報を更新する。
自動運転車両は、地図情報に基づいて、障害物を検出する、あるいは、障害物の手前で停止する際のマージン距離を取得する。
自動運転車両は、障害物に対する行動に関して遠隔オペレータの判断が必要な場合、遠隔オペレータに支援を要求する支援要求を発行する。
地図管理方法は、
支援要求に応答して遠隔オペレータから自動運転車両に対して出されるオペレータ指示を取得することと、
オペレータ指示の取得状況、あるいは、オペレータ指示の内容に基づいて、障害物の種類を推定することと、
障害物の種類に応じて地図情報を更新することと
を含む。
1-1.構成例
図1は、本実施の形態に係る自動運転管理システム1の概要を示す概念図である。自動運転管理システム1は、自動運転車両100と地図管理装置300を含んでいる。
例えば、地図情報MAPは、「静止物地図情報MAP_BG」を含んでいる。静止物地図情報MAP_BGは、静止物に関する地図情報であり、静止物の位置を示す。つまり、静止物地図情報MAP_BGは、が存在するか否かを位置毎に示す。静止物としては、道路構造物(例:壁、ガードレール)、草、樹木、等が挙げられる。
地図情報MAPは、「地形地図情報MAP_TE」を含んでいてもよい。地形地図情報MAP_TEは、地形(terrain)に関する地図情報であり、位置[X,Y]における路面の高さ(高度)Zを示す。この地形地図情報MAP_TEを利用することによっても、自動運転車両100の周囲の障害物OBSを検出することができる。例えば、ライダー点群から路面を除去することによって、路面上の障害物OBSを検出することができる。
2-1.概要
図5は、本実施の形態に係る遠隔支援システム2の概要を示す概略図である。遠隔支援システム2は、自動運転車両100及び遠隔オペレータ端末200を含んでいる。遠隔オペレータ端末200は、遠隔オペレータOが自動運転車両100に対する遠隔支援を行う際に使用する端末装置である。遠隔オペレータ端末200を遠隔支援HMI(Human Machine Interface)と言うこともできる。自動運転車両100と遠隔オペレータ端末200は、通信ネットワークを介して互いに通信可能である。
上述の通り、自動運転車両100は、障害物OBSを検出することができる。検出した障害物OBSに対する行動に関して遠隔オペレータOの判断が必要な場合、自動運転車両100は、遠隔オペレータOに支援を要求する支援要求REQを発行してもよい。
3-1.概要
上述の通り、自動運転車両100は、地図情報MAPに基づいて、自動運転車両100の周囲の障害物OBSを検出することができる。もし地図情報MAPが実状から乖離している場合、障害物OBSの検出精度が低下するおそれがある。例えば、障害物OBSの誤検出が発生するおそれがある。障害物OBSの検出精度の低下は、自動運転制御の観点から好ましくない。従って、地図情報MAPの実状からの乖離を認識し、地図情報MAPを更新することが望まれる。
地図管理システム3は、オペレータ指示INSに基づいて障害物OBSの種類を推定する。より詳細には、地図管理システム3は、オペレータ指示INSの取得状況、あるいは、オペレータ指示INSの内容に基づいて、障害物OBSの種類を推定する。以下、この障害物種類推定処理の様々な具体例について説明する。
第1の例では、地図管理システム3は、上述の基準緩和指示の取得状況に基づいて、障害物OBSの種類を推定する。
第2の例においても、地図管理システム3は、上述の基準緩和指示の取得状況に基づいて、障害物OBSの種類を推定する。
第3の例では、地図管理システム3は、オペレータ指示INSの内容に基づいて、障害物OBSの種類を推定する。特に、地図管理システム3は、オペレータ指示INSが基準緩和指示であるか否かに基づいて、障害物OBSが静止物であるか否かを推定する。
第4の例では、地図管理システム3は、上述の回避指示の取得状況に基づいて、障害物OBSの種類を推定する。回避指示は、検出した障害物OBSを回避しながら進行することを自動運転車両100に指示する。
第5の例では、遠隔オペレータ端末200に、遠隔オペレータOが選択可能な複数の指示ボタンが設置される。例えば、複数の指示ボタンは、「第1種静止物に対して基準緩和指示」、「第2種静止物に対して回避指示」、「移動物に対して待機指示」、等を含んでいる。遠隔オペレータOは、適切な指示ボタンを選択する。遠隔オペレータ端末200は、遠隔オペレータOによって選択された指示ボタンの内容を示すオペレータ指示INSを出力する。地図管理システム3は、オペレータ指示INSの内容に基づいて、障害物OBSの種類を推定することができる。
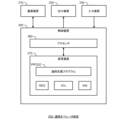
図10は、本実施の形態に係る地図管理システム3の機能構成例を示すブロック図である。地図管理システム3は、機能ブロックとして、支援要求取得部10、障害物情報取得部20、オペレータ指示取得部30、障害物種類推定部40、及び地図更新部50を含んでいる。これら機能ブロックは、地図管理システム3に含まれる1又は複数のプロセッサにより実現される。
以上に説明されたように、本実施の形態によれば、自動運転車両100によって利用される地図情報MAPを更新するために、自動運転車両100によって検出された障害物OBSに関する遠隔支援の内容が参照される。遠隔オペレータOからのオペレータ指示INSは、障害物OBSの種類によって異なる可能性が高い。従って、遠隔オペレータOからのオペレータ指示INSに基づいて、自動運転車両100によって検出された障害物OBSの種類を推定することができる。そして、推定された障害物OBSの種類に応じて地図情報MAPが更新される。
自動運転車両100によって利用される地図情報MAPは、静止物地図情報MAP_BGに限られない。地図情報MAPは、地形地図情報MAP_TE(図4参照)を含んでいてもよい。その場合にも上記と同様の地図更新処理を適用可能である。
5-1.構成例
図14は、自動運転車両100の構成例を示すブロック図である。自動運転車両100は、通信装置110、センサ群120、走行装置130、及び制御装置150を備えている。
制御装置150は、自動運転車両100の運転環境を示す運転環境情報ENVを取得する。運転環境情報ENVは、記憶装置170に格納される。
制御装置150は、自動運転車両100の走行を制御する車両走行制御を実行する。車両走行制御は、操舵制御、駆動制御、及び制動制御を含む。制御装置150は、走行装置130(操舵装置、駆動装置、及び制動装置)を制御することによって車両走行制御を実行する。
制御装置150は、上述の地図管理システム3による地図更新処理の少なくとも一部を担ってもよい。制御装置150は、支援要求取得部10、障害物情報取得部20、及びオペレータ指示取得部30の機能を少なくとも備えている。制御装置150は、障害物種類推定部40の機能を備えていてもよい。制御装置150は、地図更新部50の機能を備えていてもよい。
図16は、遠隔オペレータ端末200の構成例を示すブロック図である。遠隔オペレータ端末200は、通信装置210、出力装置220、入力装置230、及び制御装置250を含んでいる。
図17は、地図管理装置300の構成例を示すブロック図である。地図管理装置300は、通信装置310及び制御装置350を含んでいる。
2 遠隔支援システム
3 地図管理システム
10 支援要求取得部
20 障害物情報取得部
30 オペレータ指示取得部
40 障害物種類推定部
50 地図更新部
100 自動運転車両
200 遠隔オペレータ端末
300 地図管理装置
INS オペレータ指示
MAP 地図情報
MAP_BG 静止物地図情報
MAP_MG 停止マージン地図情報
MAP_TE 地形地図情報
OBS 障害物
REQ 支援要求
VCL 車両情報
Claims (10)
- 1又は複数のプロセッサと、
自動運転車両によって利用される地図情報を格納する1又は複数の記憶装置と
を備え、
前記自動運転車両は、前記地図情報に基づいて、障害物を検出し、
前記自動運転車両は、前記障害物に対する行動に関して遠隔オペレータの判断が必要な場合、前記遠隔オペレータに支援を要求する支援要求を発行し、
前記1又は複数のプロセッサは、
前記支援要求に応答して前記遠隔オペレータから前記自動運転車両に対して出されるオペレータ指示を取得し、
前記オペレータ指示の取得状況、あるいは、前記オペレータ指示の内容に基づいて、前記障害物の種類を推定し、
前記障害物の前記種類に応じて前記地図情報を更新する
ように構成され、
前記オペレータ指示は、前記障害物の手前で停止する必要があるか否かを判断するための基準を緩和することを前記自動運転車両に指示する基準緩和指示を含み、
前記1又は複数のプロセッサは、前記基準緩和指示の取得状況、あるいは、前記オペレータ指示が前記基準緩和指示であるか否かに基づいて、前記障害物の前記種類を推定するように構成された
地図管理システム。 - 請求項1に記載の地図管理システムであって、
前記地図情報は、静止物の位置、あるいは、地形を示し、
前記自動運転車両は、前記地図情報と認識センサによる認識結果との対比に基づいて、前記障害物を検出し、
前記1又は複数のプロセッサは、
前記基準緩和指示の前記取得状況、あるいは、前記オペレータ指示が前記基準緩和指示であるか否かに基づいて、前記障害物が前記静止物であるか否かを推定し、
前記障害物が前記静止物であると推定された場合、前記障害物が前記地図情報に反映されるように前記地図情報を更新する
ように構成された
地図管理システム。 - 請求項2に記載の地図管理システムであって、
前記1又は複数のプロセッサは、
前記障害物が前記静止物ではないと推定された場合、前記地図情報の更新を禁止する、あるいは、前記障害物が前記静止物ではないことが前記地図情報に反映されるように前記地図情報を更新する
ように構成された
地図管理システム。 - 請求項2に記載の地図管理システムであって、
前記1又は複数のプロセッサは、
前記障害物の検出が継続しているにもかかわらず前記基準緩和指示を前記オペレータ指示として取得した場合、前記障害物は前記静止物であると推定し、
前記障害物の検出が終了した後に前記基準緩和指示を前記オペレータ指示として取得した場合、前記障害物は前記静止物ではないと推定する
ように構成された
地図管理システム。 - 請求項2に記載の地図管理システムであって、
前記1又は複数のプロセッサは、
前記支援要求の発行から前記基準緩和指示の取得までの経過時間が閾値未満である場合、前記障害物は前記静止物であると推定し、
前記経過時間が前記閾値を超えた場合、前記障害物は前記静止物ではないと推定する
ように構成された
地図管理システム。 - 請求項2に記載の地図管理システムであって、
前記オペレータ指示は、前記自動運転車両に待機を指示する待機指示を更に含み、
前記1又は複数のプロセッサは、
前記基準緩和指示を前記オペレータ指示として取得した場合、前記障害物は前記静止物であると推定し、
前記待機指示を前記オペレータ指示として取得した場合、前記障害物は前記静止物ではないと推定する
ように構成された
地図管理システム。 - 請求項2乃至6のいずれか一項に記載の地図管理システムであって、
前記自動運転車両は、前記障害物の検出位置の周囲に前記障害物の存在確率を表す確率分布を設定し、
前記オペレータ指示は、前記障害物を回避しながら進行することを前記自動運転車両に指示する回避指示を含み、
前記1又は複数のプロセッサは、
前記回避指示を前記オペレータ指示として取得した場合、前記自動運転車両が直進すると仮定したときの前記障害物の前記存在確率の情報を取得し、
前記存在確率が確率閾値を超える場合、前記障害物は前記静止物であると推定し、
前記存在確率が前記確率閾値以下である場合、前記障害物は前記静止物ではないと推定する
ように構成された
地図管理システム。 - 1又は複数のプロセッサと、
自動運転車両によって利用される地図情報を格納する1又は複数の記憶装置と
を備え、
前記地図情報は、前記自動運転車両が障害物の手前で停止する際のマージン距離を表し、
前記自動運転車両は、前記地図情報から前記マージン距離を取得し、前記マージン距離を確保するように前記障害物の手前で停止し、
前記自動運転車両は、前記障害物に対する行動に関して遠隔オペレータの判断が必要な場合、前記遠隔オペレータに支援を要求する支援要求を発行し、
前記1又は複数のプロセッサは、
前記支援要求に応答して前記遠隔オペレータから前記自動運転車両に対して出されるオペレータ指示を取得し、
前記オペレータ指示の取得状況、あるいは、前記オペレータ指示の内容に基づいて、前記障害物の種類を推定し、
前記障害物の前記種類に応じて前記地図情報を更新する
ように構成され、
前記オペレータ指示は、前記障害物の手前で停止する必要があるか否かを判断するための基準を緩和することを前記自動運転車両に指示する基準緩和指示を含み、
前記1又は複数のプロセッサは、前記基準緩和指示の取得状況、あるいは、前記オペレータ指示が前記基準緩和指示であるか否かに基づいて、前記障害物の前記種類を推定する
地図管理システム。 - 請求項8に記載の地図管理システムであって、
前記1又は複数のプロセッサは、
前記基準緩和指示を前記オペレータ指示として取得した場合、前記障害物は静止物であると推定し、
前記障害物が前記静止物であると推定された場合、前記障害物の位置における前記マージン距離が減少するように前記地図情報を更新する
ように構成された
地図管理システム。 - 自動運転車両によって利用される地図情報を管理する地図管理方法であって、
前記自動運転車両は、前記地図情報に基づいて、障害物を検出し、
前記自動運転車両は、前記障害物に対する行動に関して遠隔オペレータの判断が必要な場合、前記遠隔オペレータに支援を要求する支援要求を発行し、
前記地図管理方法は、
前記支援要求に応答して前記遠隔オペレータから前記自動運転車両に対して出されるオペレータ指示を取得することと、
前記オペレータ指示の取得状況、あるいは、前記オペレータ指示の内容に基づいて、前記障害物の種類を推定することと、
前記障害物の前記種類に応じて前記地図情報を更新することと
を含み、
前記オペレータ指示は、前記障害物の手前で停止する必要があるか否かを判断するための基準を緩和することを前記自動運転車両に指示する基準緩和指示を含み、
前記障害物の前記種類を推定することは、前記基準緩和指示の取得状況、あるいは、前記オペレータ指示が前記基準緩和指示であるか否かに基づいて、前記障害物の前記種類を推定することを含む
地図管理方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022005898A JP7548249B2 (ja) | 2022-01-18 | 2022-01-18 | 地図管理システム及び地図管理方法 |
| US17/991,600 US12276979B2 (en) | 2022-01-18 | 2022-11-21 | Map management system and map management method |
| CN202211685116.4A CN116495006A (zh) | 2022-01-18 | 2022-12-27 | 地图管理系统以及地图管理方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022005898A JP7548249B2 (ja) | 2022-01-18 | 2022-01-18 | 地図管理システム及び地図管理方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2023104730A JP2023104730A (ja) | 2023-07-28 |
| JP7548249B2 true JP7548249B2 (ja) | 2024-09-10 |
Family
ID=87161762
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022005898A Active JP7548249B2 (ja) | 2022-01-18 | 2022-01-18 | 地図管理システム及び地図管理方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US12276979B2 (ja) |
| JP (1) | JP7548249B2 (ja) |
| CN (1) | CN116495006A (ja) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015144013A (ja) | 2015-03-31 | 2015-08-06 | 株式会社日立製作所 | ロボットシステム及び地図更新方法 |
| JP2019185280A (ja) | 2018-04-06 | 2019-10-24 | 株式会社デンソー | 管制装置 |
| JP2020027606A (ja) | 2018-08-09 | 2020-02-20 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカPanasonic Intellectual Property Corporation of America | 情報処理方法、情報処理装置、及び、情報処理システム |
| JP2020071053A (ja) | 2018-10-29 | 2020-05-07 | トヨタ自動車株式会社 | 地図情報システム |
| WO2022009900A1 (ja) | 2020-07-08 | 2022-01-13 | 株式会社Soken | 自動運転装置、車両制御方法 |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9274525B1 (en) * | 2012-09-28 | 2016-03-01 | Google Inc. | Detecting sensor degradation by actively controlling an autonomous vehicle |
| US9008890B1 (en) * | 2013-03-15 | 2015-04-14 | Google Inc. | Augmented trajectories for autonomous vehicles |
| US9248834B1 (en) * | 2014-10-02 | 2016-02-02 | Google Inc. | Predicting trajectories of objects based on contextual information |
| JP6798779B2 (ja) * | 2015-11-04 | 2020-12-09 | トヨタ自動車株式会社 | 地図更新判定システム |
| JP6665733B2 (ja) * | 2016-08-26 | 2020-03-13 | トヨタ自動車株式会社 | 情報処理装置 |
| CN110832474B (zh) * | 2016-12-30 | 2023-09-15 | 辉达公司 | 更新高清地图的方法 |
| KR20180112949A (ko) * | 2017-04-05 | 2018-10-15 | 현대자동차주식회사 | 차량의 자율 주행 제어 시스템 및 그를 이용한 자율 주행 제어방법 |
| US10955851B2 (en) * | 2018-02-14 | 2021-03-23 | Zoox, Inc. | Detecting blocking objects |
| JP7325994B2 (ja) | 2019-03-29 | 2023-08-15 | 日産自動車株式会社 | 車両経路管理方法、車両経路管理装置、及び車両経路管理システム |
| US11768493B2 (en) * | 2019-06-28 | 2023-09-26 | Zoox, Inc. | Remote vehicle guidance |
| US11610479B1 (en) * | 2019-08-05 | 2023-03-21 | United Sendees Automobile Association (USAA) | Systems and methods for intelligent traffic control |
| JP7408991B2 (ja) | 2019-10-11 | 2024-01-09 | 沖電気工業株式会社 | 移動物システム、移動物、制御プログラム、及び制御方法 |
| US11458993B2 (en) * | 2020-09-15 | 2022-10-04 | Tusimple, Inc. | Detecting a road closure by a lead autonomous vehicle (AV) and updating routing plans for following AVs |
| US12106583B2 (en) * | 2020-10-02 | 2024-10-01 | Magna Electronics Inc. | Vehicular lane marker determination system with lane marker estimation based in part on a LIDAR sensing system |
| JP7302616B2 (ja) * | 2021-02-24 | 2023-07-04 | トヨタ自動車株式会社 | 遠隔支援システム及び遠隔支援方法 |
| JP7480734B2 (ja) * | 2021-03-24 | 2024-05-10 | トヨタ自動車株式会社 | 遠隔支援システム及び遠隔支援方法 |
-
2022
- 2022-01-18 JP JP2022005898A patent/JP7548249B2/ja active Active
- 2022-11-21 US US17/991,600 patent/US12276979B2/en active Active
- 2022-12-27 CN CN202211685116.4A patent/CN116495006A/zh active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015144013A (ja) | 2015-03-31 | 2015-08-06 | 株式会社日立製作所 | ロボットシステム及び地図更新方法 |
| JP2019185280A (ja) | 2018-04-06 | 2019-10-24 | 株式会社デンソー | 管制装置 |
| JP2020027606A (ja) | 2018-08-09 | 2020-02-20 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカPanasonic Intellectual Property Corporation of America | 情報処理方法、情報処理装置、及び、情報処理システム |
| JP2020071053A (ja) | 2018-10-29 | 2020-05-07 | トヨタ自動車株式会社 | 地図情報システム |
| WO2022009900A1 (ja) | 2020-07-08 | 2022-01-13 | 株式会社Soken | 自動運転装置、車両制御方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US12276979B2 (en) | 2025-04-15 |
| CN116495006A (zh) | 2023-07-28 |
| US20230229160A1 (en) | 2023-07-20 |
| JP2023104730A (ja) | 2023-07-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7456442B2 (ja) | 情報処理装置、および情報処理方法、並びにプログラム | |
| CN112660154B (zh) | 车辆控制系统 | |
| US11618439B2 (en) | Automatic imposition of vehicle speed restrictions depending on road situation analysis | |
| CN111497834B (zh) | 驾驶辅助系统 | |
| CN113386752B (zh) | 用于确定辅助驾驶系统中最佳巡航车道的方法和装置 | |
| EP2942687B1 (en) | Automated driving safety system | |
| JP6780611B2 (ja) | 自動運転装置 | |
| CN108693878A (zh) | 前进路线设定装置以及前进路线设定方法 | |
| JP2019185293A (ja) | 車両遠隔制御方法及び車両遠隔制御装置 | |
| CN111204342B (zh) | 地图信息系统 | |
| JP7480734B2 (ja) | 遠隔支援システム及び遠隔支援方法 | |
| CN113504782B (zh) | 障碍物防撞方法、装置、系统和移动工具 | |
| JP2019530608A (ja) | 物体レベル融合の自律走行車両 | |
| US12157481B2 (en) | Systems and methods for hybrid open-loop and closed-loop path planning | |
| US20220253065A1 (en) | Information processing apparatus, information processing method, and information processing program | |
| JP2018155894A (ja) | 車両制御システム、データ処理装置、及び制御プログラム | |
| JP7754034B2 (ja) | 車両制御システム | |
| JP7548249B2 (ja) | 地図管理システム及び地図管理方法 | |
| CN112660152B (zh) | 车辆控制系统 | |
| JP7429112B2 (ja) | 管制装置 | |
| JP7736024B2 (ja) | 車両制御装置、車両制御用コンピュータプログラム及び車両制御方法 | |
| JP2024004281A (ja) | 車両制御システム | |
| JP7616189B2 (ja) | 移動体制御システム及び移動体制御方法 | |
| EP4245627A1 (en) | Vehicle control method, vehicle control system, and map management method | |
| CN114325756B (zh) | 基于激光雷达的近距离避障方法、装置、车辆及存储介质 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20231127 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20240418 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240423 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240607 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240730 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240812 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7548249 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |