JP7555307B2 - 移動式清掃装置及びそれを用いた清掃方法 - Google Patents
移動式清掃装置及びそれを用いた清掃方法 Download PDFInfo
- Publication number
- JP7555307B2 JP7555307B2 JP2021103812A JP2021103812A JP7555307B2 JP 7555307 B2 JP7555307 B2 JP 7555307B2 JP 2021103812 A JP2021103812 A JP 2021103812A JP 2021103812 A JP2021103812 A JP 2021103812A JP 7555307 B2 JP7555307 B2 JP 7555307B2
- Authority
- JP
- Japan
- Prior art keywords
- cleaning device
- mobile cleaning
- filter
- hatch
- air
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images














Landscapes
- Electric Vacuum Cleaner (AREA)
Description
先ず、図1から図4を用いて、本実施例の移動式清掃装置1の装置構成について説明する。
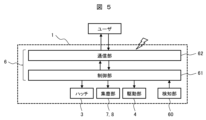
次に、図5を用いて、本実施例の移動式清掃装置1の制御構成について説明する。
次に、図6Aから図7を用いて、本実施例の移動式清掃装置1の動作について説明する。
ハッチ3を開いた状態で移動式清掃装置1を稼働させることで、人が室内に在室している場合には、移動せずに集塵部であるファン8を駆動させることにより、空気中に浮遊している微粒子や飛沫を効率良くフィルタ9に集塵することができ、人が不在時には床面の清掃を行うとともに、空気清浄も大風量にて行うことができる。
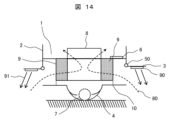
本実施例の移動式清掃装置1は、実施例1の移動式清掃装置1の筐体2内部に紫外線照射装置90を備え、フィルタ9及びプレフィルタ10に対して紫外線91を照射可能な構成である。
空気中に飛散するウイルスをフィルタ9及びプレフィルタ10で捕集できることに加え、同時に床面にも紫外線91を照射できることから、床面に付着した微粒子や飛沫を集塵するのと同時に、取り切れなかったウイルスや細菌にも紫外線91を照射することで不活化や除菌が可能となる。よって、床面清掃及び空気清浄のみを行う場合に比べて、更に感染症の感染防止効果を高めることができる。
本実施例の移動式清掃装置1は、実施例1の移動式清掃装置1のハッチ3内部(ハッチ3の内側)に紫外線照射装置90を備え、フィルタ9及びプレフィルタ10に対して紫外線91を照射可能な構成である。
空気中に飛散するウイルスをフィルタ9及びプレフィルタ10で捕集できることに加え、同時に床面にも紫外線91を照射できることから、床面に付着した微粒子や飛沫を集塵するのと同時に、取り切れなかったウイルスや細菌にも紫外線91を照射することで不活化や除菌が可能となる。よって、床面清掃及び空気清浄のみを行う場合に比べて、更に感染症の感染防止効果を高めることができる。
2…筐体
3…ハッチ
4…駆動輪
6…制御基板
7…ブラシ
8…ファン
9…フィルタ
10…プレフィルタ
11…机
12…椅子
13…居室
50…回転軸
60…距離センサ
61…制御部
62…通信部
80…空気流れ
81…吸気
82…排気
90…紫外線照射装置
91…紫外線。
Claims (8)
- 室内を移動可能な移動式清掃装置であって、
本体外殻となる筐体と、
前記筐体内に配置されたファンと、
本体下部に配置されたブラシおよび第1のフィルタと、
前記ファンにより形成される気流の前記第1のフィルタよりも下流側に配置された第2のフィルタと、
前記筐体に回動可能に取り付けられ、本体外側に展開可能な可動ハッチと、を備え、
前記可動ハッチの開閉を行うことにより、前記気流の主な流れが前記ブラシを通過するモードと、前記可動ハッチの開口部を通過するモードのいずれかを選択可能である移動式清掃装置。 - 請求項1に記載の移動式清掃装置であって、
前記可動ハッチは、当該可動ハッチを開いたときに前記筐体の外側から吸引した空気を前記第1のフィルタと前記第2のフィルタとの間に供給可能な位置に設置されている移動式清掃装置。 - 請求項1に記載の移動式清掃装置であって、
前記第1のフィルタおよび前記第2のフィルタに対して紫外線を照射可能な前記筐体内の位置に紫外線照射装置を備える移動式清掃装置。 - 請求項1に記載の移動式清掃装置であって、
前記可動ハッチの内側に固定され、前記可動ハッチを閉じたときに前記第1のフィルタおよび前記第2のフィルタに対して紫外線を照射可能な紫外線照射装置を備える移動式清掃装置。 - 請求項1に記載の移動式清掃装置であって、
本体下部に駆動部を備え、
前記駆動部により、自律移動が可能である移動式清掃装置。 - 移動式清掃装置を用いた清掃方法であって、
(a)室内に人が在室か否かを判定するステップ、
(b)前記(a)ステップの判定結果に応じて、筐体側面に設置された可動ハッチの開閉を行うことにより、前記移動式清掃装置内の気流の主な流れが本体下部に配置されたブラシを通過するモードと、前記可動ハッチの開口部を通過するモードのいずれかを選択するステップ、
を有することを特徴とする清掃方法。 - 請求項6に記載の清掃方法であって、
前記(a)ステップにおいて、人が不在であると判定した場合、前記可動ハッチを閉じて床面清掃を行った後、前記可動ハッチを開いて室内の空気清浄を行うことを特徴とする清掃方法。 - 請求項6に記載の清掃方法であって、
前記(a)ステップにおいて、人が在室していると判定した場合、前記可動ハッチを開いて室内の空気清浄を行うことを特徴とする清掃方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021103812A JP7555307B2 (ja) | 2021-06-23 | 2021-06-23 | 移動式清掃装置及びそれを用いた清掃方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021103812A JP7555307B2 (ja) | 2021-06-23 | 2021-06-23 | 移動式清掃装置及びそれを用いた清掃方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2023002949A JP2023002949A (ja) | 2023-01-11 |
| JP7555307B2 true JP7555307B2 (ja) | 2024-09-24 |
Family
ID=84817175
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021103812A Active JP7555307B2 (ja) | 2021-06-23 | 2021-06-23 | 移動式清掃装置及びそれを用いた清掃方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7555307B2 (ja) |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002323243A (ja) | 2001-04-25 | 2002-11-08 | Daikin Ind Ltd | 空気清浄機 |
| JP2005046616A (ja) | 2003-07-29 | 2005-02-24 | Samsung Kwangju Electronics Co Ltd | 陰イオン発生器を具備するロボット掃除機 |
| JP2010022769A (ja) | 2008-07-24 | 2010-02-04 | Mitsubishi Electric Corp | 電気掃除機 |
| JP2010162263A (ja) | 2009-01-19 | 2010-07-29 | Panasonic Corp | 清掃システム |
| JP2021029710A (ja) | 2019-08-27 | 2021-03-01 | パナソニックIpマネジメント株式会社 | 自走式掃除機及び掃除システム |
| JP2021067406A (ja) | 2019-10-24 | 2021-04-30 | 株式会社日立製作所 | 微粒子処理システム、微粒子処理制御装置及び微粒子処理制御プログラム |
| JP2021076269A (ja) | 2019-11-06 | 2021-05-20 | 株式会社日立製作所 | 移動型空気清浄機 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| NO934765L (no) * | 1993-12-22 | 1995-06-23 | Klean As | Anordning ved renseanlegg |
-
2021
- 2021-06-23 JP JP2021103812A patent/JP7555307B2/ja active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002323243A (ja) | 2001-04-25 | 2002-11-08 | Daikin Ind Ltd | 空気清浄機 |
| JP2005046616A (ja) | 2003-07-29 | 2005-02-24 | Samsung Kwangju Electronics Co Ltd | 陰イオン発生器を具備するロボット掃除機 |
| JP2010022769A (ja) | 2008-07-24 | 2010-02-04 | Mitsubishi Electric Corp | 電気掃除機 |
| JP2010162263A (ja) | 2009-01-19 | 2010-07-29 | Panasonic Corp | 清掃システム |
| JP2021029710A (ja) | 2019-08-27 | 2021-03-01 | パナソニックIpマネジメント株式会社 | 自走式掃除機及び掃除システム |
| JP2021067406A (ja) | 2019-10-24 | 2021-04-30 | 株式会社日立製作所 | 微粒子処理システム、微粒子処理制御装置及び微粒子処理制御プログラム |
| JP2021076269A (ja) | 2019-11-06 | 2021-05-20 | 株式会社日立製作所 | 移動型空気清浄機 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2023002949A (ja) | 2023-01-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2279244C2 (ru) | Робот-чиститель, оснащенный генератором отрицательных ионов | |
| CN204254762U (zh) | 空气净化器 | |
| JP4233487B2 (ja) | 自走式空気清浄ロボット | |
| KR101539020B1 (ko) | 저소음 저발열 구조의 클린룸 진공청소기 | |
| JP2015131123A (ja) | 空気清浄機 | |
| JP5772950B2 (ja) | 空気清浄機 | |
| JP2005016841A (ja) | 空気清浄機 | |
| JP2018175113A (ja) | 空気清浄装置 | |
| JP2013141341A (ja) | 自走式電子機器、電子機器の充電端子の清掃方法 | |
| JP6217810B2 (ja) | 空気清浄機 | |
| CN113280445B (zh) | 一种室内空气净化消杀机器人及消杀方法 | |
| JP7564661B2 (ja) | 移動式除菌装置および室内除菌システム | |
| KR20210109102A (ko) | 이동형 공기청정기 | |
| JP7555307B2 (ja) | 移動式清掃装置及びそれを用いた清掃方法 | |
| JP2011202857A (ja) | 空気清浄装置 | |
| JP3108536U (ja) | クリーンブース | |
| JP2022109461A (ja) | 移動式除菌装置および除菌方法 | |
| JPWO2012144336A1 (ja) | 空気清浄機 | |
| JP2016067614A (ja) | 電気掃除機 | |
| JP2013146312A (ja) | 自走式イオン放出装置 | |
| JP5673845B2 (ja) | 空気清浄機 | |
| JP2011143048A (ja) | 電気掃除機 | |
| JP2003114039A (ja) | 清掃機 | |
| CN212307719U (zh) | 收纳盒及清洁机器人 | |
| CN111265152A (zh) | 清洁机器人及清洁机器人的气流净化方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240208 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20240823 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240903 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240910 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7555307 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |