JP7566880B2 - 撓み噛合い式歯車装置 - Google Patents
撓み噛合い式歯車装置 Download PDFInfo
- Publication number
- JP7566880B2 JP7566880B2 JP2022509981A JP2022509981A JP7566880B2 JP 7566880 B2 JP7566880 B2 JP 7566880B2 JP 2022509981 A JP2022509981 A JP 2022509981A JP 2022509981 A JP2022509981 A JP 2022509981A JP 7566880 B2 JP7566880 B2 JP 7566880B2
- Authority
- JP
- Japan
- Prior art keywords
- internal
- external
- strain gauge
- strain
- easily deformable
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
















Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H49/00—Other gearings
- F16H49/001—Wave gearings, e.g. harmonic drive transmissions
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H57/00—General details of gearing
- F16H57/01—Monitoring wear or stress of gearing elements, e.g. for triggering maintenance
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L5/00—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes
- G01L5/0009—Force sensors associated with a bearing
- G01L5/0019—Force sensors associated with a bearing by using strain gages, piezoelectric, piezo-resistive or other ohmic-resistance based sensors
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H49/00—Other gearings
- F16H49/001—Wave gearings, e.g. harmonic drive transmissions
- F16H2049/003—Features of the flexsplines therefor
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H57/00—General details of gearing
- F16H57/01—Monitoring wear or stress of gearing elements, e.g. for triggering maintenance
- F16H2057/012—Monitoring wear or stress of gearing elements, e.g. for triggering maintenance of gearings
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H57/00—General details of gearing
- F16H57/01—Monitoring wear or stress of gearing elements, e.g. for triggering maintenance
- F16H2057/016—Monitoring of overload conditions
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H57/00—General details of gearing
- F16H57/01—Monitoring wear or stress of gearing elements, e.g. for triggering maintenance
- F16H2057/018—Detection of mechanical transmission failures
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Retarders (AREA)
Description
起振体と、
前記起振体により撓み変形される外歯歯車と、
前記外歯歯車と噛合う内歯歯車と、
を備えた撓み噛合い式歯車装置であって、
前記内歯歯車は、内周に内歯が形成された内歯リング部と、外部部材に連結される外部連結部と、前記内歯リング部と前記外部連結部との間に設けられ、前記内歯リング部よりも変形しやすい構成とされた変形容易部と、当該変形容易部に設けられた歪み測定手段と、を有し、
前記変形容易部は、軸方向の厚さが前記内歯リング部の厚さより小さく、前記内歯リング部と前記外部連結部との間で周方向に連続したリング状の平板を有する構成とした。
図1は、本発明の実施形態1に係る撓み噛合い式歯車装置を示す軸方向断面図である。
なお、以下の説明では、後述する回転軸O1に平行な方向を軸方向、回転軸O1を中心とする円周に沿った方向を周方向、回転軸O1を中心とする円周の半径に沿った方向を半径方向という。
第2内歯部421は、剛性を有する第2内歯部材42の内周の一部に歯が設けられて構成される。
そして、第1外歯部32は、第1内歯部411と噛合し、第2外歯部33は、第2内歯部421と噛合している。
起振体軸受31は、基部34の内側に嵌入される外輪31aと、複数の転動体(コロ)31bと、複数の転動体31bを保持する保持器31cとを有する。
複数の転動体31bは、第1外歯部32及び第1内歯部411の径方向内方に配置され、周方向に並ぶ第1群の転動体31bと、第2外歯部33及び第2内歯部421の径方向内方に配置され、周方向に並ぶ第2群の転動体31bとを有する。これらの転動体31bは、起振体30Aの外周面と外輪31aの内周面とを転走面として転動する。起振体軸受31は、起振体30Aとは別体の内輪を有してもよい。また、起振体軸受31は、外輪31aをなくして、基部34の内周面を外輪側転走面としてもよい。転動体の種類も特に限定されるものではなく、例えば玉でもよい。また、転動体の列数も2つに限定されるものではなく、1列でもよいし、3列以上でもよい。
また、ケーシング43と第2内歯部材42との間であって、主軸受48よりも出力側には、オイルシール541が設けられ、軸方向外側(出力側)への潤滑剤の流出を抑制する。
そして、第1カバー44は、第1外歯部32と第1内歯部411とを軸方向の反出力側から覆う。第1カバー44、第3カバー49、第1内歯部材41及びケーシング43は、直接または間接的に外部部材(例えば、協働ロボットの基端側アーム部材)に連結される。
また、第1カバー44と起振体軸30の軸部30Bとの間であって、軸受46よりも反出力側には、オイルシール542が設けられ、軸方向外側(反出力側)への潤滑剤の流出を抑制する。
第2カバー45と起振体軸30の軸部30Cとの間には軸受47が配置され、起振体軸30は、回転自在に第2カバー45に支持される。なお、軸受47は、玉軸受を例示しているが他のラジアル軸受を使用しても良い。
また、第2カバー45と起振体軸30の軸部30Cとの間であって、軸受47よりも出力側には、オイルシール543が設けられ、軸方向外側(出力側)への潤滑剤の流出を抑制する。なお、第2カバー45は、第2内歯部材42と一体的に形成されてもよい。
同様に、第1内歯部材41と第3カバー49との間にはシール用のOリング554が介挿され、第3カバー49と第1カバー44との間にはシール用のOリング552が介挿され、第2内歯部材42と第2カバー45との間にはシール用のOリング553が介挿されている。
従って、撓み噛合い式歯車装置1の内部空間(第1外歯部32と第1内歯部411の噛合い部、第2外歯部33と第2内歯部421の噛合い部、主軸受48、軸受46,47、起振体軸受31等の存在する空間)は、潤滑剤が封入される潤滑剤封入空間とされ、オイルシール541~543やOリング551~554によって密封されている。
外部連結部413は、リング状であって第1内歯部材41の最外周に位置し、周方向に一定間隔で外部部材に対する複数の取付穴が軸方向に貫通形成されている。なお、外部連結部413は、直接、外部部材に連結されてもよいし、第1カバー44や第3カバー49を介して外部部材に連結されてよい。
柱部材415は、内歯リング部412の外周から半径方向外側に向かって延出され、外部連結部413の内周に連結されている。なお、ここでは、変形容易部414、内歯リング部412及び外部連結部413は、同一材料(例えば、金属材料、樹脂材料等)により一体的に形成されている場合を例示する。
また、柱部材415は、周方向について一定の間隔で四つ設けられている場合を例示する。各柱部材415の周方向の間隔は、均一であることが好ましいが、必須ではない。また、柱部材415の個数も増減可能である。
なお、外部連結部413の半径方向内側における出力側の平面には、周方向全周に渡って、出力側に凸となる凸条413aが形成されており、ケーシング43の反出力側の凹部に嵌入(インロー嵌合)されている。
変形容易部414(柱部材415)は、第1内歯部材41にトルクが作用したときに(具体的には、外部連結部413が外部部材に連結された状態で、第1内歯部411が噛合い反力を受けることで、第1内歯部材41にトルクが作用したときに)、内歯リング部412よりも大きく変形する。その結果、柱部材415に生じる半径方向の伸縮歪みも大きくなる。この柱部材415の歪みにはトルクとの相関があるため、これを歪みゲージ416で検出することにより、トルクを取得することができる。
測定装置417は、各歪みゲージ416の検出信号を増幅して記録する。また、測定装置417は、起振体30Aの回転位相が図示しない検出部から入力される。
測定装置417は、例えば、起振体軸30の回転位相と各歪みゲージ416の検出値とトルク値とを対応付けたデータテーブルを保有している。測定装置417は、検出部から入力された回転位相と各歪みゲージ416の検出値に対応するトルク値をデータテーブルを参照して特定する。データテーブルは、例えば実験により予め準備される。具体的には、起振体30Aの回転位相および第1内歯部材41に付与するトルクを変化させながら、各歪みゲージ416の検出値を取得することでデータテーブルを作成する。なお、測定装置417が、各歪みゲージ416の検出値からトルクを特定する方法が特に限定されるものではなく、例えば予め用意された演算式で演算によりトルク値を算出する構成としても良い。
図示略のモータ等から回転運動が入力され、起振体軸30が回転すると、起振体30Aの運動が第1外歯部32及び第2外歯部33に伝わる。このとき、第1外歯部32及び第2外歯部33は、起振体30Aの外周面に沿った形状に規制され、軸方向から見て、長軸部分と短軸部分とを有する楕円形状に撓んでいる。さらに、第1外歯部32は、固定された第1内歯部材41の第1内歯部411と長軸部分で噛合っている。このため、第1外歯部32及び第2外歯部33は、起振体30Aと同じ回転速度で回転することはなく、第1外歯部32及び第2外歯部33の内側で起振体30Aが相対的に回転する。そして、この相対的な回転に伴って、第1外歯部32及び第2外歯部33は長軸位置と短軸位置とが周方向に移動するように撓み変形する。この変形の周期は、起振体軸30の回転周期に比例する。
このとき、変形容易部414の各柱部材415では、それぞれに設けられた歪みゲージ416により検出された半径方向の歪みが測定装置417に入力され、これらに基づくトルク値が導出される。
なお、これらの構成よって取得されたトルク値は、例えば、撓み噛合い式歯車装置1を部品として組み込んでいる本体装置の制御装置等に入力され、当該制御装置におけるトルク値の異常発生の検出に使用することができる。例えば、撓み噛合い式歯車装置1が協働ロボットの関節に組み込まれている場合には、異常なトルク値の上昇によりロボットアームと人との接触を検知して、ロボットの停止や回避動作などが可能となる。
以上のように、本実施形態の撓み噛合い式歯車装置1によれば、第1内歯部材41は、内歯リング部412よりも変形しやすい構成とされた変形容易部414と、当該変形容易部414に設けられた歪みゲージ416とを有している。
このため、トルク伝達が行われる際に、第1内歯部材41は、外部連結部413よりも内側で内歯リング部412よりも変形しやすい変形容易部414において歪みを検出することができるので、トルクによる歪みが生じやすい位置で歪みゲージ416が歪みの検出を行うことで、より精度の高い良好なトルク検出を行うことが可能となる。
また、トルクによる歪みの生じ難い外周部で歪みの検出を行う場合には、その検出精度の向上のためには、外周部でのトルクによる歪みが生じ易くなるように第1内歯部材が全体的に非硬質材料で形成する等の対策が必要となるが、その対策には、歯車の噛合い誤差が生じやすくなるという難点がある。
これに対して、本実施形態の撓み噛合い式歯車装置1の第1内歯部材41は、変形容易部414からなる一部分のみを変形容易とすれば良いので、歯車の噛合い誤差の発生を抑制することが可能となる。
また、歪みゲージ416を撓み噛合い式歯車装置1の外周ではなく内部に設置しているので、装置が小型化される。
図3は、本発明の実施形態2に係る撓み噛合い式歯車装置の第1内歯部材の他の例を軸方向から見た正面図である。
実施形態2の第1内歯部材41Aは、前述した第1内歯部材41と比較して、変形容易部414Aを構成する柱部材415の数が異なっている。即ち、この第1内歯部材41Aの変形容易部414Aは、周方向に均一な間隔で八つの柱部材415を備えている。なお、一つ一つの柱部材415の構造や寸法は前述した前述した第1内歯部材41の柱部材415と同一である。
そして、各柱部材415には、個別に歪みゲージ416が取り付けられている。
また、歪みゲージ416の数を増やすことが可能となる。
図4は、本発明の実施形態3に係る撓み噛合い式歯車装置の第1内歯部材の他の例を軸方向から見た正面図である。
実施形態3の第1内歯部材41Bは、前述した第1内歯部材41と比較して、四つのサポート部材418Bを備えている点が異なっている。
これらのサポート部材418Bは、いずれも、図5に示すように、内歯リング部412と外部連結部413との間で半径方向に渡るように延出されており、その一端部、例えば、内歯リング部412側は固定され、他端部、例えば、外部連結部413側は、当該外部連結部413の内周に摺接又は滑動可能となっている。なお、外部連結部413側を固定し、内歯リング部412側を摺接又は滑動可能としても良い。
各サポート部材418Bは、内歯リング部412及び外部連結部413とは別部材で構成されており、一端部側は、溶接、接着、その他の接合方法により固定されている。なお、各サポート部材418Bは、内歯リング部412又は外部連結部413に対して少なくとも周方向に固定されていればよい。また、各サポート部材418Bは、例えば、樹脂等のように第1内歯部材41とは別材料で形成しても良いし、同一材料で形成しても良い。
さらに、サポート部材418Bは、その一端部側のみが外部連結部413又は内歯リング部412に対して周方向に固定され、他端部は固定されてないので、内歯リング部412を外側から支えつつも、トルクによる柱部材415の伸縮歪みを抑制しないので、良好なトルク検出を行うことが可能となる。
図6は、本発明の実施形態4に係る撓み噛合い式歯車装置の第1内歯部材の他の例を軸方向から見た正面図である。
前述した第1内歯部材41は、変形容易部414が、半径方向に真っ直ぐに延出された四つの柱部材415で構成されているがこれに限定されない。
複数の支承部415Cは、周方向について均一間隔で内歯リング部412と外部連結部413との間に設けられている。各支承部415Cは、内歯リング部412及び外部連結部413と同一材料で一体的に形成しても良いし、別材料で形成しても良い。また、各支承部415Cは、その両端部が内歯リング部412及び外部連結部413に固定されている。また、ここでは、支承部415Cが四つ設けられる場合を例示しているが、複数であれば良く、その数は四つに限定されない。なお、実施形態4においては、各支承部415Cが柱部材に該当する。
そして、歪みゲージ416は、各支承部415Cの中間連結部415Ccにおいて、当該中間連結部415Ccの長手方向の伸縮歪みを検出する方向に取り付けられている。
これにより、撓み噛合い式歯車装置のトルク伝達時において、周方向又は周方向に対する接線方向に沿った部位である中間連結部415Ccは、より顕著に伸縮歪みが生じるので、より精度の高いトルク検出を行うことが可能となる。
図7は、本発明の実施形態5に係る撓み噛合い式歯車装置の第1内歯部材の他の例を軸方向から見た正面図である。
前述した第1内歯部材41は、変形容易部414が、半径方向に真っ直ぐに延出された四つの柱部材415で構成されているがこれに限定されない。
各支承部415Dは、その両端部が外部連結部413の内周に固定され、その中間部が内歯リング部412の外周に固定されている。
そして、ここでは、支承部415Dが四つ設けられている場合を例示する。四つの支承部415Dは、その両端部が他の支承部415Dの端部に連結され、軸方向から見て、四つの支承部415Dは、一体となって正方形の枠状を呈している。
また、ここでは、支承部415Dが四つ設けられる場合を例示しているが、内歯リング部412を周方向に均一間隔で囲繞可能であれば、その数は四つに限定されない。
図8は、本発明の実施形態6に係る撓み噛合い式歯車装置の第1内歯部材の他の例を示す射視図である。
前述した第1内歯部材41は、変形容易部414が、周方向に間欠的な四つの柱部材415で構成されているがこれに限定されない。
但し、図9の軸方向断面図に示すように、この変形容易部414Eの軸方向の厚さd3が、内歯リング部412の軸方向の厚さd1及びと外部連結部413の軸方向の厚さd2のいずれよりも小さく設定されている。
各歪みゲージ416は、半径方向に沿って伸縮歪みを検出する方向に取り付けられている。
また、変形容易部414Eは、周方向に連続しているので、全周に渡って内歯リング部412を外側から支えることができ、内歯リング部412の撓みを抑制することができる。これにより、歯車の噛合い誤差を低減することが可能となる。
図1は、本発明の実施形態7の第1内歯部材の軸方向断面図である。
前述した各実施形態では、変形容易部414の形状を工夫することで内歯リング部412よりも変形し易くしたが、変形容易部414を変形し易くする手法は特に限定されない。例えば、図10に示す第1内歯部材41Fのように、変形容易部414Fは、内歯リング部412さらには外部連結部413よりも軟質材料とすることにより、内歯リング部412よりも変形し易くしてもよい。例えば、変形容易部414Fは、内歯リング部412、外部連結部413よりも軟質な金属材料、より軟質な樹脂材料で形成することが好ましい。
その場合、内歯リング部412と変形容易部414Fと外部連結部413の軸方向の厚さは同一でも良いし、変形容易部414Fが内歯リング部412や外部連結部413よりも厚さを大きくしても良い。
また、変形容易部414Fは、周方向に沿って間欠的であっても連続的であっても良い。間欠的とする場合には、前述した変形容易部414,414A,414C,414Dと同じ形態としても良い。さらに、前述したサポート部材418Bを加えてもよい。
図11は、本発明の実施形態8に係る撓み噛合い式歯車装置の第1内歯部材の他の例を示す正面図である。なお、図11では、第1外歯部32を、長軸位置を示す楕円で簡略的に図示している。
これに対して、実施形態8に係る撓み噛合い式歯車装置では、第1内歯部材41Gの変形容易部414が、第1内歯部材41Gの直径方向の両側で二つ一組となる柱部材415を二組有し、各柱部材415を周方向に均一間隔で有する点は、第1内歯部材41と同じである。そして、第1内歯部材41Gでは、それぞれの二つ一組となる柱部材415の一方にのみ歪みゲージ56-1,56-2が設けられている。
また、図11において二点鎖線で示した歪みゲージ56-3,56-4は、後述する第1内歯部材の他の例であり、本実施形態8の第1内歯部材41Gには、歪みゲージ56-3,56-4は設けられていない。
各測定部56A,56Bは、抵抗線が平行に幾重にも折り返されたグリッド部561A,561Bと、グリッド部561A,561Bの両端部から延びるリード562A,562Bとを有する。
図12における左側の測定部56Aのグリッド部561Aの抵抗線は、右斜め下方向に沿って延びており、右側の測定部56Bのグリッド部561Bの抵抗線は、左斜め下方向に沿って延びている。
この構造から分かるように、この歪みゲージ56は、実質的には、歪みの検出方向が異なる二つの歪みゲージを有し、これら二つの歪みゲージから個別に検出信号を得ることが可能な構造である。
歪みゲージ56は、二つの測定部56A,56Bのグリッド部561A,561Bの各延線方向を合成した方向を基準方向とする(図12の矢印G)。そして、撓み噛合い式歯車装置1の動作時に柱部材415に対して剪断力が発生する方向に対して、基準方向Gが直交するように、歪みゲージ56は、柱部材415に取り付けられている。より詳細には、歪みゲージ56の基準方向Gは、柱部材415の長手方向、つまり、半径方向に平行となるように設けられている。
また、起振体軸30の反時計方向の回転により、第1内歯部材41Gに対して第1外歯部32が時計方向に相対的に回転する場合(以下、逆回転時という)、第1内歯部材41Gの内歯リング部412は、外部連結部413に対して反時計方向のトルクを受ける。これにより生じる剪断力は、主に、測定部56Bのグリッド部561Bに作用し、トルクに応じた検出信号を測定部56Bから得ることが出来る。
従って、二つ一組の柱部材415の両方に歪みゲージ56を設けなくとも、いずれか一方の柱部材415にのみ歪みゲージ56を設ければ、必要な歪みを検出することができ、各歪みゲージ56の検出からトルクを求めることができる。
つまり、実施形態8の撓み噛合い式歯車装置1は、軸方向に対する曲げモーメントが生じ難い環境での利用において、特に好適にトルクを求めることができる。
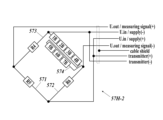
ホイートストンブリッジ回路57は、第1~第4経路571~574を有する。
そして、第1経路571の一端部と第2経路572の一端部とがいずれも電圧供給源の正極側及びトランスミッターの正極側に接続されている。また、第3経路573の一端部と第4経路574の一端部とがいずれも電圧供給源の負極側及びトランスミッターの負極側に接続されている。
さらに、第1経路571の他端部と第3経路573の他端部とが連結され、当該連結点が検出信号の正極側出力となる。また、第2経路572の他端部と第4経路574の他端部とが連結され、当該連結点が検出信号の負極側出力となる。
また、歪みゲージ56として、二重剪断型歪みゲージを例示したが、前述した柱部材415の長手方向(半径方向)の歪みを検出する歪みゲージ416を利用することも可能である。
また、前述した各実施形態1~7における歪みゲージ416に替えて、歪みゲージ56を利用することも可能である。
さらに、実施形態8では、二重剪断型歪みゲージを例示したが、例えば、撓み噛合い式歯車装置が、正逆いずれかの回転でしか利用されない環境であれば、測定部56A,56Bのいずれか一方のみを備える歪みゲージを利用しても良い。
また、第2経路572には、歪みゲージ56-2の測定部56B(図13では「2B」)と歪みゲージ56-4の測定部56B(図13では「4B」)とが直列で設けられる。
また、第3経路573には、歪みゲージ56-1の測定部56B(図13では「1B」)と歪みゲージ56-3の測定部56B(図13では「3B」)とが直列で設けられる。
また、第4経路574には、歪みゲージ56-1の測定部56A(図13では「1A」)と歪みゲージ56-3の測定部56A(図13では「3A」)とが直列で設けられる。
これにより、各柱部材415から検出される剪断歪みに基づく検出信号から撓み噛合い式歯車装置のトルクを得ることが可能である。
図14は、本発明の実施形態9に係る撓み噛合い式歯車装置の第1内歯部材の他の例を示す簡略図である。なお、図14の場合も、第1外歯部32を、長軸位置を示す楕円で簡略的に図示している。
これに対して、実施形態9に係る撓み噛合い式歯車装置の第1内歯部材41Hでは、変形容易部414が複数かつ奇数の柱部材415を周方向に均一間隔で有する構成を例示する。本実施形態9では、柱部材415を七本有する場合を例示するが、柱部材415は、複数かつ奇数であれば任意に変更可能である。
全ての柱部材415には、前述した歪みゲージ56と同一の歪みゲージ56-1~56-7が周方向に順番に設けられている。
この場合、第1外歯部32の長軸の一端部側では、柱部材415の剛性によって第1内歯部材41Hに生じる剪断歪みは小さくなり、第1外歯部32の長軸の他端部側では、第1内歯部材41Hに生じる剪断歪みは大きくなる。
ここで、各歪みゲージ56-1~56-7のうち、歪みが検出される歪みゲージは主として第1外歯部32の長軸付近に位置する歪みゲージとなる。図14の実線で示す例の場合には、56-4,56-5、56-1、56-2、56-7で歪みが検出されるが、歪みゲージ56-2および56-7については、長軸から離れているため、検出される歪みは僅かである。前述したように、第1外歯部32の長軸の他端部側では、第1内歯部材41Hに生じる剪断歪みが大きくなるため、歪みゲージ56-4および56-5の検出値は大きくなる。一方、第1外歯部32の長軸の一端部側では、第1内歯部材41Hに生じる剪断歪みが小さくなるため、歪みゲージ56-1の検出値は歪みゲージ56-4および56-5に比べて小さくなる。しかし、各々の測定部56Aが直列に接続されると共に各々の測定部56Bが直列に接続されているホイートストンブリッジ回路57H(後述の図15参照)を通じて測定が行われるので、第1外歯部32の長軸の一端部と他端部とで平均化されて(全ての歪みゲージの出力が合計されることで)中程度の検出信号が出力される。
従って、各歪みゲージ56-1~56-7の検出値が合計されると、やはり中程度の検出信号が出力される。
なお、図15では、「1A」~「7A」がそれぞれ歪みゲージ56-1~56-7の測定部56Aを示し、「1B」~「7B」がそれぞれ歪みゲージ56-1~56-7の測定部56Bを示している。
抵抗器R1,R2は、歪みが生じていないときの直列接続された七つの測定部56Aの抵抗値に等しくなっている(直列接続された七つの測定部56Bの抵抗値とも等しい)。
このため、第1外歯部32の長軸が周方向に回転移動する場合に個々の歪みゲージ56-1~56-7から得られる個々の検出信号は小さくなる場合でも、各々の合計された検出信号が得ることができ、検出信号を大きくすることが可能となる。また、柱部材の数を複数かつ奇数とすることで、第1外歯部32の長軸の周方向位置に起因する検出信号(の合計値)のばらつきを低減できる。
抵抗器R1~R3は、歪みが生じていないときの直列接続された七つの測定部56Aの抵抗値に等しくなっている(直列接続された七つの測定部56Bの抵抗値とも等しい)。
抵抗器R4~R6は、歪みが生じていないときの直列接続された七つの測定部56Bの抵抗値に等しくなっている。
このような構成により、安全レベルの診断のために比較可能な二つの検出信号を各ホイートストンブリッジ回路57H-1,57H-2から個別に取得することが可能である。
上記各実施形態で示した細部は、発明の趣旨を逸脱しない範囲で適宜変更可能である。
また、第1内歯部材と第2内歯部材のいずれに変形容易部及び歪みゲージを設けるかに拘わらず、第1内歯部材と第2内歯部材のいずれが、非回転側又は動力伝達方向上流側であっても良い。また、上記各実施形態1~9(実施形態8を除く)では、すべての柱部材415に歪みゲージ416,56を取り付けたが、これに限定されず、一部の柱部材415にのみ歪みゲージ416,56を取り付けてもよい。また、上記各実施形態では、柱部材415の軸方向端面に歪みゲージ416を配置したが、これに限定されず、例えば柱部材415の周方向の面に配置してもよい。
30 起振体軸
30A 起振体
32 第1外歯部(外歯歯車)
33 第2外歯部(外歯歯車)
41,41A,41B,41C,41D,41E,41F 第1内歯部材(内歯歯車)
411 第1内歯部(内歯)
412 内歯リング部
413 外部連結部
414,414A,414C,414D,414E,414F 変形容易部
415 柱部材
415C,415D 支承部
416 歪みゲージ(歪み測定手段)
56,56-1~56-7 歪みゲージ(二重剪断型歪みゲージ)
56A,56B 測定部
417 測定装置
418B サポート部材
57,57H-1,57H-2 ホイートストンブリッジ回路
571 第1経路
572 第2経路
573 第3経路
574 第4経路
Claims (2)
- 起振体と、
前記起振体により撓み変形される外歯歯車と、
前記外歯歯車と噛合う内歯歯車と、
を備えた撓み噛合い式歯車装置であって、
前記内歯歯車は、内周に内歯が形成された内歯リング部と、外部部材に連結される外部連結部と、前記内歯リング部と前記外部連結部との間に設けられ、前記内歯リング部よりも変形しやすい構成とされた変形容易部と、当該変形容易部に設けられた歪み測定手段と、を有し、
前記変形容易部は、軸方向の厚さが前記内歯リング部の厚さより小さく、前記内歯リング部と前記外部連結部との間で周方向に連続したリング状の平板を有する、撓み噛合い式歯車装置。 - 前記変形容易部は、前記外部連結部よりも変形しやすい構成とされる請求項1に記載の撓み噛合い式歯車装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2024172918A JP7822440B2 (ja) | 2020-03-24 | 2024-10-02 | 撓み噛合い式歯車装置及びトルク測定装置 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020052075 | 2020-03-24 | ||
| JP2020052075 | 2020-03-24 | ||
| PCT/JP2021/010647 WO2021193244A1 (ja) | 2020-03-24 | 2021-03-16 | 撓み噛合い式歯車装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2024172918A Division JP7822440B2 (ja) | 2020-03-24 | 2024-10-02 | 撓み噛合い式歯車装置及びトルク測定装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2021193244A1 JPWO2021193244A1 (ja) | 2021-09-30 |
| JP7566880B2 true JP7566880B2 (ja) | 2024-10-15 |
Family
ID=77892125
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022509981A Active JP7566880B2 (ja) | 2020-03-24 | 2021-03-16 | 撓み噛合い式歯車装置 |
| JP2024172918A Active JP7822440B2 (ja) | 2020-03-24 | 2024-10-02 | 撓み噛合い式歯車装置及びトルク測定装置 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2024172918A Active JP7822440B2 (ja) | 2020-03-24 | 2024-10-02 | 撓み噛合い式歯車装置及びトルク測定装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US12146559B2 (ja) |
| EP (1) | EP4130512B1 (ja) |
| JP (2) | JP7566880B2 (ja) |
| CN (1) | CN115280038B (ja) |
| WO (1) | WO2021193244A1 (ja) |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7566880B2 (ja) * | 2020-03-24 | 2024-10-15 | 住友重機械工業株式会社 | 撓み噛合い式歯車装置 |
| DE102021116857A1 (de) | 2021-06-30 | 2023-01-05 | Minebea Mitsumi Inc. | Drehmomentsensor |
| JP7668700B2 (ja) * | 2021-07-28 | 2025-04-25 | 住友重機械工業株式会社 | センサ装置 |
| IT202100030044A1 (it) * | 2021-11-26 | 2023-05-26 | Ergotech Srl | Nuovo riduttore armonico a struttura compatta realizzato con materiale plastico |
| JP7685942B2 (ja) * | 2021-12-06 | 2025-05-30 | 住友重機械工業株式会社 | アクチュエータ |
| JP2023099959A (ja) * | 2022-01-04 | 2023-07-14 | 住友重機械工業株式会社 | 歯車装置及びセンサ設置部材 |
| CN115355300A (zh) * | 2022-06-24 | 2022-11-18 | 深圳市同川科技有限公司 | 谐波减速机 |
| CN118257819A (zh) * | 2022-12-26 | 2024-06-28 | 美的集团股份有限公司 | 内啮合行星齿轮装置和机器人用关节装置 |
| WO2024185440A1 (ja) * | 2023-03-07 | 2024-09-12 | 株式会社グローセル | トルクセンサ |
| JP2025092974A (ja) * | 2023-12-11 | 2025-06-23 | 住友重機械工業株式会社 | 偏心揺動型減速装置 |
| WO2025196309A1 (de) * | 2024-03-21 | 2025-09-25 | Ovalo Gmbh | Spannungswellengetriebe |
| EP4621266A1 (de) | 2024-03-21 | 2025-09-24 | Ovalo GmbH | Getriebe |
| WO2025196310A1 (de) | 2024-03-21 | 2025-09-25 | Ovalo Gmbh | Spannungswellengetriebe |
| AT527841B1 (de) * | 2024-05-24 | 2025-07-15 | Kraken Innovations Gmbh | Koaxialgetriebe mit integrierter messsensorik |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004198400A (ja) | 2002-09-17 | 2004-07-15 | Harmonic Drive Syst Ind Co Ltd | 波動歯車装置のトルク検出装置 |
| WO2010142318A1 (en) | 2009-06-08 | 2010-12-16 | Abb Technology Ab | A device for measuring torque |
| JP2011209099A (ja) | 2010-03-30 | 2011-10-20 | Sony Corp | トルクセンサおよびロボット装置 |
| JP2018132154A (ja) | 2017-02-17 | 2018-08-23 | 日本電産シンポ株式会社 | 電動機付き減速機 |
| JP2019537032A (ja) | 2016-10-17 | 2019-12-19 | フランカ エミカ ゲーエムベーハーFRANKA EMIKA GmbH | トルク・センサ・デバイス及びトルク検出方法。 |
Family Cites Families (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5172774A (en) | 1991-04-12 | 1992-12-22 | Ingersoll-Rand Company | Axially compact torque transducer |
| JP2545317Y2 (ja) | 1991-09-20 | 1997-08-25 | 株式会社ハーモニック・ドライブ・システムズ | 波動歯車変速機のトルク検出装置 |
| DE19627385A1 (de) * | 1996-07-06 | 1998-01-08 | Bayerische Motoren Werke Ag | Radmeßnabe |
| JP3669421B2 (ja) * | 2000-04-25 | 2005-07-06 | 日産自動車株式会社 | トルク計測装置 |
| DE10342479B4 (de) | 2002-09-17 | 2016-03-31 | Harmonic Drive Systems Inc. | Drehmomentdetektionsvorrichtung für Wellengetriebe |
| JP2005069402A (ja) * | 2003-08-26 | 2005-03-17 | Harmonic Drive Syst Ind Co Ltd | トルク検出機構付き波動歯車装置 |
| JP2007040774A (ja) * | 2005-08-02 | 2007-02-15 | Ono Sokki Co Ltd | トルク計 |
| US7743672B2 (en) * | 2008-06-06 | 2010-06-29 | Kulite Semiconductor Products, Inc. | Multiple axis load cell controller |
| CN102317750B (zh) * | 2009-02-06 | 2015-07-22 | Abb股份公司 | 多轴线力和扭矩传感器的组及组装方法 |
| JP6175381B2 (ja) * | 2014-02-21 | 2017-08-02 | 住友重機械工業株式会社 | 撓み噛合い式歯車装置 |
| JP2017203645A (ja) * | 2016-05-09 | 2017-11-16 | ソニー株式会社 | トルクセンサ及び力制御型アクチュエータ |
| JP6549687B2 (ja) * | 2017-04-10 | 2019-07-24 | ファナック株式会社 | トルクセンサおよびロボット |
| JP7229659B2 (ja) * | 2017-11-02 | 2023-02-28 | 住友重機械工業株式会社 | 動力伝達装置 |
| JP7170389B2 (ja) * | 2017-11-28 | 2022-11-14 | 住友重機械工業株式会社 | ギヤモータ |
| JP7085822B2 (ja) * | 2017-11-28 | 2022-06-17 | 住友重機械工業株式会社 | ギヤモータ及びその組立方法 |
| WO2019163258A1 (ja) * | 2018-02-21 | 2019-08-29 | アルプスアルパイン株式会社 | トルクセンサ |
| JP7050559B2 (ja) * | 2018-04-16 | 2022-04-08 | 住友重機械工業株式会社 | 撓み噛合い式歯車装置 |
| JP7034026B2 (ja) * | 2018-07-25 | 2022-03-11 | 住友重機械工業株式会社 | 撓み噛合い式歯車装置 |
| JP2021179309A (ja) * | 2018-08-10 | 2021-11-18 | アルプスアルパイン株式会社 | トルクセンサ |
| JP7088790B2 (ja) * | 2018-09-04 | 2022-06-21 | 住友重機械工業株式会社 | 撓み噛み合い式歯車装置 |
| DE102018125078A1 (de) * | 2018-10-10 | 2020-04-16 | Schaeffler Technologies AG & Co. KG | Spannungswellengetriebe und elastisches Übertragungselement hierfür sowie Roboterarm und Verfahren zum Anordnen eines Dehnungsmessstreifens |
| JP7566880B2 (ja) * | 2020-03-24 | 2024-10-15 | 住友重機械工業株式会社 | 撓み噛合い式歯車装置 |
| JP7787639B2 (ja) * | 2020-05-18 | 2025-12-17 | 住友重機械工業株式会社 | 歯車の製造方法、歯車及び撓み噛合い式歯車装置 |
| JP7668700B2 (ja) * | 2021-07-28 | 2025-04-25 | 住友重機械工業株式会社 | センサ装置 |
-
2021
- 2021-03-16 JP JP2022509981A patent/JP7566880B2/ja active Active
- 2021-03-16 WO PCT/JP2021/010647 patent/WO2021193244A1/ja not_active Ceased
- 2021-03-16 EP EP21775014.0A patent/EP4130512B1/en active Active
- 2021-03-16 CN CN202180012959.5A patent/CN115280038B/zh active Active
-
2022
- 2022-09-21 US US17/949,853 patent/US12146559B2/en active Active
-
2024
- 2024-10-02 JP JP2024172918A patent/JP7822440B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004198400A (ja) | 2002-09-17 | 2004-07-15 | Harmonic Drive Syst Ind Co Ltd | 波動歯車装置のトルク検出装置 |
| WO2010142318A1 (en) | 2009-06-08 | 2010-12-16 | Abb Technology Ab | A device for measuring torque |
| JP2011209099A (ja) | 2010-03-30 | 2011-10-20 | Sony Corp | トルクセンサおよびロボット装置 |
| JP2019537032A (ja) | 2016-10-17 | 2019-12-19 | フランカ エミカ ゲーエムベーハーFRANKA EMIKA GmbH | トルク・センサ・デバイス及びトルク検出方法。 |
| JP2018132154A (ja) | 2017-02-17 | 2018-08-23 | 日本電産シンポ株式会社 | 電動機付き減速機 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2021193244A1 (ja) | 2021-09-30 |
| WO2021193244A1 (ja) | 2021-09-30 |
| JP7822440B2 (ja) | 2026-03-02 |
| EP4130512A1 (en) | 2023-02-08 |
| CN115280038A (zh) | 2022-11-01 |
| US12146559B2 (en) | 2024-11-19 |
| JP2025004088A (ja) | 2025-01-14 |
| EP4130512B1 (en) | 2025-05-14 |
| EP4130512A4 (en) | 2023-07-05 |
| US20230008068A1 (en) | 2023-01-12 |
| CN115280038B (zh) | 2026-02-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7566880B2 (ja) | 撓み噛合い式歯車装置 | |
| JP7101881B2 (ja) | ストレイン・ウェーブ・ギアおよびストレイン・ウェーブ・ギア用の伝達要素、ロボットアーム、ならびにトルクを測定するための方法 | |
| JP7487904B2 (ja) | トルク検出センサ、動力伝達装置、及び、ロボット | |
| TWI655833B (zh) | 具電動機的減速機 | |
| JP7668700B2 (ja) | センサ装置 | |
| CN112503159B (zh) | 波动齿轮装置 | |
| JP7665891B2 (ja) | センサおよび動力伝達装置 | |
| JP7164137B2 (ja) | 可変剛性弾性体及びこれを有するアクチュエーターモジュール | |
| US11045950B2 (en) | Driving device and detecting device | |
| JP7746430B2 (ja) | 駆動装置、ロボット、制御方法、検出装置、物品の製造方法、処理方法、プログラム、記録媒体 | |
| CN119178538A (zh) | 传感器装置 | |
| JP7710339B2 (ja) | 環状体、波動減速機、ロボット、およびトルク検出装置 | |
| Min et al. | Robot joint module equipped with joint torque sensor with disk-type coupling for torque error reduction | |
| JP7380981B2 (ja) | トルク検出センサおよび動力伝達装置 | |
| JP7396588B2 (ja) | 歪み検出センサおよび動力伝達装置 | |
| JP7234417B2 (ja) | トルクを測定するための装置及びそのような装置を備えるストレイン・ウェーブ・ギア | |
| JP2022037742A (ja) | 故障検出システム | |
| JP2021135211A (ja) | 動力伝達装置 | |
| JP2018004290A (ja) | スラスト荷重計測装置 | |
| JP2021004829A (ja) | トルク検出センサおよび動力伝達装置 | |
| JP2025088379A (ja) | 撓み噛合い式減速装置 | |
| CN112050979B (zh) | 扭矩检测传感器、动力传递装置及机器人 | |
| CN113464610B (zh) | 挠曲啮合式齿轮装置、齿轮装置系列及其制造及设计方法 | |
| EP4667779A1 (en) | Strain wave gear device with torque sensor |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240117 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240220 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20240415 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240617 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240903 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20241002 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7566880 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |