JP7570038B2 - 位置測定装置 - Google Patents
位置測定装置 Download PDFInfo
- Publication number
- JP7570038B2 JP7570038B2 JP2021575599A JP2021575599A JP7570038B2 JP 7570038 B2 JP7570038 B2 JP 7570038B2 JP 2021575599 A JP2021575599 A JP 2021575599A JP 2021575599 A JP2021575599 A JP 2021575599A JP 7570038 B2 JP7570038 B2 JP 7570038B2
- Authority
- JP
- Japan
- Prior art keywords
- unit
- bias
- moving body
- detection signal
- moving object
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images














Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/005—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 with correlation of navigation data from several sources, e.g. map or contour matching
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/002—Measuring arrangements characterised by the use of optical techniques for measuring two or more coordinates
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/005—Measuring angular rate using gyroscopic effects
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/28—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network with correlation of data from several navigational instruments
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/20—Analysis of motion
- G06T7/246—Analysis of motion using feature-based methods, e.g. the tracking of corners or segments
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
- G06T7/73—Determining position or orientation of objects or cameras using feature-based methods
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/80—Analysis of captured images to determine intrinsic or extrinsic camera parameters, i.e. camera calibration
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30244—Camera pose
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Theoretical Computer Science (AREA)
- Automation & Control Theory (AREA)
- Multimedia (AREA)
- Navigation (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Description
例えば、フォークリフト等の有人の荷役自動車、無人搬送車(Automated guided vehicle、AGV)及び自律移動型の荷物運搬ロボット等の移動体に搭載され、カメラによって撮像された撮像画像を用いて移動体の位置を測定する位置測定装置が知られている。このような位置測定装置を構成する技術として、例えば逐次撮像される画像に基づいて自己位置の測定と地図情報の生成とを実行するVisual-SLAM(Simultaneous Localization and Mapping)技術が知られている。
1.構成
図1は、移動体1の構成を例示する模式図である。本開示の第1実施形態に係る位置測定装置100は、例えば、フォークリフト等の有人の荷役自動車、AGV及び自律移動型の荷物運搬ロボット等の移動体1に搭載され、移動体1の位置を測定する。
以上のように構成される位置測定装置100の動作について、以下説明する。
図2を参照して、位置測定装置100の基本的な動作として位置測定処理の一例を説明する。位置測定処理は、位置測定部41として動作する制御部4によって実行される。
2-2-1.動作の概要
本実施形態の位置測定装置100は、以上のような位置測定処理の実施中にバイアス更新処理を繰り返して、バイアス誤差の補正値をリアルタイムに更新する。以下、バイアス更新処理の概要について、図3を用いて説明する、
図4は、本実施形態に係る位置測定装置100によって実行されるバイアス更新処理の一例を示すフローチャートである。バイアス更新処理は、制御部4によって繰り返し実行される。
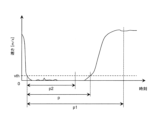
図5は、図4に示した静止判定処理S2の一例を示すフローチャートである。まず、静止判定部416として動作する制御部4は、静止期間pを計測する(S21)。静止期間pの計測開始時には、静止判定部416は、静止期間pをリセットした後にカウントアップを始める。図5に示した例では、静止期間pは、移動体1の速さvが予め設定された所定の閾値vth以下である期間である。例えば、閾値vthは0.075(m/s)である。
以上のように、本実施形態に係る位置測定装置100は、移動体1の位置を測定する。位置測定装置100は、カメラ2と、IMU3と、バイアス補正部421と、位置算出部414と、静止判定部416とを備える。カメラ2は、移動体1に搭載され、移動体1の周囲の環境を撮像して撮像画像を取得する。IMU3は、移動体1に搭載され、移動体1の動きを検出して検出結果を示す検出信号を出力する。バイアス補正部421は、移動体1の動きに依存せずにIMU3の検出信号に含まれるバイアス誤差を補正する補正値を用いて、検出信号を処理する。位置算出部414は、カメラ2によって取得された撮像画像と、バイアス補正部によって処理された検出信号とに基づいて、移動体1の位置を算出する。静止判定部416は、移動体1が静止しているか否かを判定する(S2)。バイアス補正部421は、静止判定部416が移動体が静止していると判定したときに(S3でYes)、IMU3によって出力された検出信号に基づいて、バイアス誤差の補正値を更新する(S5)。
以下、図6~8を用いて第2実施形態を説明する。第2実施形態では、バイアス更新が為されていない期間が長くなり過ぎると静止判定処理S2における判定の基準を緩和する位置測定装置について説明する。
以下、図9~10を用いて第3実施形態を説明する。第3実施形態では、温度センサを用いる位置測定装置について説明する。
以下、図11を用いて第4実施形態を説明する。第2実施形態では、バイアスの未更新期間が長くなり過ぎると静止判定処理S2の判定基準を緩和した。本実施形態では、静止判定処理S2の判定基準の代わりに、バイアス更新処理の周期aを短くする位置測定装置について説明する。
以下、図12~13を用いて第5実施形態を説明する。本実施形態では、バイアス更新の有無の決定に、IMU3の検出信号のばらつきを用いる位置測定装置について説明する。
以下、図14を用いて第6実施形態を説明する。本実施形態では、バイアス更新の有無の決定に、位置算出における特徴点を用いる位置測定装置について説明する。
以上のように、本出願において開示する技術の例示として、第1~第6の実施形態を説明した。しかしながら、本開示における技術は、これに限定されず、適宜、変更、置き換え、付加、省略などを行った実施の形態にも適用可能である。また、第1~第6の実施形態で説明した各構成要素を組み合わせて、新たな実施の形態とすることも可能である。
2 カメラ
4 制御部
41 位置測定部
411 特徴点抽出部
414 位置算出部
415 地図管理部
416 静止判定部
42 処理部
421 バイアス補正部
422 バイアス除去部
423 バイアス更新部
424 姿勢算出部
5 記憶部
51 地図情報
7 通信I/F
8 駆動部
9 温度センサ
10 進入禁止区域
20 通路
100 位置測定装置
Claims (8)
- 移動体の位置を測定する位置測定装置であって、
前記移動体に搭載され、前記移動体の周囲の環境を撮像して撮像画像を取得する撮像部と、
前記移動体に搭載され、前記移動体の動きを検出して検出結果を示す検出信号を出力する検出部と、
前記移動体の動きに依存せずに前記検出信号に含まれるバイアス誤差を補正する補正値を用いて、前記検出信号を処理するバイアス補正部と、
前記撮像部によって取得された撮像画像と、前記バイアス補正部によって処理された検出信号とに基づいて、前記移動体の位置を算出する位置算出部と、
前記移動体が静止しているか否かを判定する静止判定部と、
前記撮像部によって取得された撮像画像から特徴点を抽出する特徴点抽出部とを備え、
前記バイアス補正部は、
前記静止判定部が前記移動体が静止していると判定したときに前記検出部によって出力された検出信号に基づいて、前記バイアス誤差の補正値を更新し、
前記特徴点抽出部によって抽出された特徴点の数が所定の数未満である場合には、前記バイアス誤差を更新しない、
位置測定装置。 - 前記位置算出部は、前記撮像部が順次、取得する複数の撮像画像の間で、前記特徴点抽出部によって抽出された特徴点を追跡することによって、前記移動体の位置を算出する、請求項1に記載の位置測定装置。
- 移動体の位置を測定する位置測定装置であって、
前記移動体に搭載され、前記移動体の周囲の環境を撮像して撮像画像を取得する撮像部と、
前記移動体に搭載され、前記移動体の動きを検出して検出結果を示す検出信号を出力する検出部と、
前記移動体の動きに依存せずに前記検出信号に含まれるバイアス誤差を補正する補正値を用いて、前記検出信号を処理するバイアス補正部と、
前記撮像部によって取得された撮像画像と、前記バイアス補正部によって処理された検出信号とに基づいて、前記移動体の位置を算出する位置算出部と、
前記移動体が静止しているか否かを判定する静止判定部とを備え、
前記バイアス補正部は、前記静止判定部が前記移動体が静止していると判定したときに前記検出部によって出力された検出信号に基づいて、前記バイアス誤差の補正値を更新し、
前記静止判定部は、
前記位置算出部の算出結果に基づいて前記移動体の速さを算出し、
前記速さが、予め設定された閾値以下である状態が所定期間、継続した場合、前記移動体が静止していると判定し、
前記静止判定部は、前記バイアス誤差が最後に更新されてから経過した時間が長いほど前記所定期間を短く及び/又は前記閾値を大きく設定して、前記移動体が静止しているか否かを判定する、位置測定装置。 - 移動体の位置を測定する位置測定装置であって、
前記移動体に搭載され、前記移動体の周囲の環境を撮像して撮像画像を取得する撮像部と、
前記移動体に搭載され、前記移動体の動きを検出して検出結果を示す検出信号を出力する検出部と、
前記移動体の動きに依存せずに前記検出信号に含まれるバイアス誤差を補正する補正値を用いて、前記検出信号を処理するバイアス補正部と、
前記撮像部によって取得された撮像画像と、前記バイアス補正部によって処理された検出信号とに基づいて、前記移動体の位置を算出する位置算出部と、
前記移動体が静止しているか否かを判定する静止判定部と、
前記移動体の周囲の環境の温度を検知する温度センサとを備え、
前記バイアス補正部は、前記静止判定部が前記移動体が静止していると判定したときに前記検出部によって出力された検出信号に基づいて、前記バイアス誤差の補正値を更新し、
前記静止判定部は、
前記位置算出部の算出結果に基づいて前記移動体の速さを算出し、
前記速さが、予め設定された閾値以下である状態が所定期間、継続した場合、前記移動体が静止していると判定し、
前記静止判定部は、前記温度センサによって検知された温度の変化が大きいほど前記所定期間を短く及び/又は前記閾値を大きく設定して、前記移動体が静止しているか否かを判定する、位置測定装置。 - 移動体の位置を測定する位置測定装置であって、
前記移動体に搭載され、前記移動体の周囲の環境を撮像して撮像画像を取得する撮像部と、
前記移動体に搭載され、前記移動体の動きを検出して検出結果を示す検出信号を出力する検出部と、
前記移動体の動きに依存せずに前記検出信号に含まれるバイアス誤差を補正する補正値を用いて、前記検出信号を処理するバイアス補正部と、
前記撮像部によって取得された撮像画像と、前記バイアス補正部によって処理された検出信号とに基づいて、前記移動体の位置を算出する位置算出部と、
前記移動体が静止しているか否かを判定する静止判定部とを備え、
前記バイアス補正部は、前記静止判定部が前記移動体が静止していると判定したときに前記検出部によって出力された検出信号に基づいて、前記バイアス誤差の補正値を更新し、
前記静止判定部は、予め設定された周期ごとに前記移動体が静止しているか否かを判定し、
前記周期は、前記バイアス誤差が最後に更新されてから経過した時間が長いほど短く設定される、位置測定装置。 - 前記移動体の周囲の環境の温度を検知する温度センサを更に備え、
前記静止判定部は、前記温度センサによって検知された温度の変化が大きいほど前記周期を短く設定して、前記移動体が静止しているか否かを判定する、請求項5に記載の位置測定装置。 - 前記バイアス補正部は、前記検出部によって出力された前記検出信号の値の分散に基づいて、前記バイアス誤差を更新するか否かを決定する、請求項1~6のいずれか1項に記載の位置測定装置。
- 前記検出部は、前記移動体の動きとして角速度を検出するジャイロセンサを含む、請求項1~7のいずれか1項に記載の位置測定装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2024167769A JP2024174077A (ja) | 2020-02-07 | 2024-09-26 | 位置測定装置 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020019928 | 2020-02-07 | ||
| JP2020019928 | 2020-02-07 | ||
| PCT/JP2020/034511 WO2021157116A1 (ja) | 2020-02-07 | 2020-09-11 | 位置測定装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2024167769A Division JP2024174077A (ja) | 2020-02-07 | 2024-09-26 | 位置測定装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2021157116A1 JPWO2021157116A1 (ja) | 2021-08-12 |
| JP7570038B2 true JP7570038B2 (ja) | 2024-10-21 |
Family
ID=77199831
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021575599A Active JP7570038B2 (ja) | 2020-02-07 | 2020-09-11 | 位置測定装置 |
| JP2024167769A Pending JP2024174077A (ja) | 2020-02-07 | 2024-09-26 | 位置測定装置 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2024167769A Pending JP2024174077A (ja) | 2020-02-07 | 2024-09-26 | 位置測定装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (2) | US12437440B2 (ja) |
| EP (1) | EP4102175B1 (ja) |
| JP (2) | JP7570038B2 (ja) |
| WO (1) | WO2021157116A1 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3904995A4 (en) * | 2018-12-28 | 2022-02-23 | Panasonic Intellectual Property Management Co., Ltd. | LOCATION DEVICE |
| SE544298C2 (en) * | 2020-04-14 | 2022-03-29 | Husqvarna Ab | Robotic work tool system and method for defining a working area |
| CN113959341B (zh) * | 2021-10-14 | 2024-04-26 | 江苏科技大学 | 光学结构位移测量方法、系统及存储介质 |
| JP7607618B2 (ja) | 2022-08-05 | 2024-12-27 | 三菱ロジスネクスト株式会社 | バイアス推定装置、フォークリフト、バイアス推定方法及びプログラム |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011141221A (ja) | 2010-01-08 | 2011-07-21 | Toyota Motor Corp | 測位装置及び測位方法 |
| US20140270380A1 (en) | 2013-03-15 | 2014-09-18 | Novatel Inc. | System and method for heavy equipment navigation and working edge positioning using an image acquisition device that provides distance information |
| US20160341543A1 (en) | 2012-07-17 | 2016-11-24 | L-3 Communications Corporation | Target Locating Device and Methods |
| WO2017094521A1 (ja) | 2015-11-30 | 2017-06-08 | アルプス電気株式会社 | ウェアラブル装置とその姿勢測定方法及びプログラム |
| JP2017215193A (ja) | 2016-05-31 | 2017-12-07 | 株式会社東芝 | 情報処理装置および方法 |
| WO2019186677A1 (ja) | 2018-03-27 | 2019-10-03 | 株式会社日立製作所 | ロボット位置姿勢推定・三次元計測装置 |
| WO2019230620A1 (ja) | 2018-05-29 | 2019-12-05 | ヤマハ発動機株式会社 | 船舶着岸支援装置および船舶着岸支援方法 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007101526A (ja) * | 2005-09-06 | 2007-04-19 | Sony Corp | 速度検出装置、速度検出方法、速度検出プログラム、位置検出装置、位置検出方法及び位置検出プログラム並びにナビゲーション装置 |
| JP5838758B2 (ja) | 2011-03-31 | 2016-01-06 | 富士通株式会社 | キャリブレーション方法、情報処理装置及びキャリブレーションプログラム |
| KR101725060B1 (ko) * | 2014-06-17 | 2017-04-10 | 주식회사 유진로봇 | 그래디언트 기반 특징점을 이용한 이동 로봇의 위치를 인식하기 위한 장치 및 그 방법 |
| EP3159122A4 (en) * | 2014-06-17 | 2018-05-30 | Yujin Robot Co., Ltd. | Device and method for recognizing location of mobile robot by means of search-based correlation matching |
| JP6922208B2 (ja) * | 2016-12-15 | 2021-08-18 | カシオ計算機株式会社 | 情報処理装置、情報処理方法及びプログラム |
| EP3447445A1 (en) * | 2017-08-21 | 2019-02-27 | Tata Consultancy Services Limited | Systems and methods for estimating errors in gyroscope sensors |
| WO2019187816A1 (ja) * | 2018-03-30 | 2019-10-03 | 日本電産シンポ株式会社 | 移動体および移動体システム |
| US10740924B2 (en) * | 2018-04-16 | 2020-08-11 | Microsoft Technology Licensing, Llc | Tracking pose of handheld object |
| JP7063760B2 (ja) * | 2018-07-27 | 2022-05-09 | 株式会社ダイヘン | 移動体 |
| US20200050205A1 (en) * | 2018-08-07 | 2020-02-13 | Cnh Industrial America Llc | System and method for updating a mapped area |
-
2020
- 2020-09-11 JP JP2021575599A patent/JP7570038B2/ja active Active
- 2020-09-11 EP EP20917842.5A patent/EP4102175B1/en active Active
- 2020-09-11 WO PCT/JP2020/034511 patent/WO2021157116A1/ja not_active Ceased
-
2022
- 2022-07-27 US US17/874,561 patent/US12437440B2/en active Active
-
2024
- 2024-09-26 JP JP2024167769A patent/JP2024174077A/ja active Pending
-
2025
- 2025-09-09 US US19/323,012 patent/US20260004452A1/en active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011141221A (ja) | 2010-01-08 | 2011-07-21 | Toyota Motor Corp | 測位装置及び測位方法 |
| US20160341543A1 (en) | 2012-07-17 | 2016-11-24 | L-3 Communications Corporation | Target Locating Device and Methods |
| US20140270380A1 (en) | 2013-03-15 | 2014-09-18 | Novatel Inc. | System and method for heavy equipment navigation and working edge positioning using an image acquisition device that provides distance information |
| WO2017094521A1 (ja) | 2015-11-30 | 2017-06-08 | アルプス電気株式会社 | ウェアラブル装置とその姿勢測定方法及びプログラム |
| JP2017215193A (ja) | 2016-05-31 | 2017-12-07 | 株式会社東芝 | 情報処理装置および方法 |
| WO2019186677A1 (ja) | 2018-03-27 | 2019-10-03 | 株式会社日立製作所 | ロボット位置姿勢推定・三次元計測装置 |
| WO2019230620A1 (ja) | 2018-05-29 | 2019-12-05 | ヤマハ発動機株式会社 | 船舶着岸支援装置および船舶着岸支援方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2024174077A (ja) | 2024-12-13 |
| US12437440B2 (en) | 2025-10-07 |
| US20220358674A1 (en) | 2022-11-10 |
| WO2021157116A1 (ja) | 2021-08-12 |
| EP4102175A1 (en) | 2022-12-14 |
| US20260004452A1 (en) | 2026-01-01 |
| JPWO2021157116A1 (ja) | 2021-08-12 |
| EP4102175A4 (en) | 2023-07-26 |
| EP4102175B1 (en) | 2025-07-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7570038B2 (ja) | 位置測定装置 | |
| KR102440358B1 (ko) | 관성 기반 항법 장치 및 상대사전적분에 따른 관성 기반 항법 방법 | |
| JP6760114B2 (ja) | 情報処理装置、データ管理装置、データ管理システム、方法、及びプログラム | |
| US20200124421A1 (en) | Method and apparatus for estimating position | |
| KR101880185B1 (ko) | 이동체 포즈 추정을 위한 전자 장치 및 그의 이동체 포즈 추정 방법 | |
| KR101738750B1 (ko) | 실외 환경에서의 강인한 위치 인식 방법 및 장치 | |
| KR101115012B1 (ko) | 로봇의 각속도 오차 보정 장치 및 방법 | |
| CN113544758B (zh) | 车辆控制装置 | |
| JP7336223B2 (ja) | 自己位置推定方法 | |
| EP3904995A1 (en) | Localization device | |
| US11983890B2 (en) | Method and apparatus with motion information estimation | |
| US20250076069A1 (en) | Information processing apparatus, information processing method, and storage medium | |
| US20260063776A1 (en) | Method for calibrating offsets between doppler-based sensors on a mobile platform | |
| CN118050707A (zh) | 激光雷达的标定方法及装置、存储介质、终端设备 | |
| KR101738751B1 (ko) | 실내 자기장을 이용한 이동 로봇의 위치 인식 방법 및 장치 | |
| WO2019053986A1 (ja) | 自己位置推定装置と自己位置推定方法とプログラムおよび移動体装置 | |
| JP7234840B2 (ja) | 位置推定装置 | |
| KR101650128B1 (ko) | 이동 로봇의 지도 생성 장치 및 방법 | |
| CN113795726B (zh) | 自身位置修正方法及自身位置修正装置 | |
| CN110570680A (zh) | 利用地图信息确定对象位置的方法和系统 | |
| KR102703476B1 (ko) | 추측항법 오차 보정 방법 및 그 전자 장치 | |
| JP2022037260A (ja) | 位置測定装置 | |
| KR101767169B1 (ko) | 비전 센서 기반 자이로 드리프트 감소 장치 및 방법 | |
| JP7814270B2 (ja) | 自車位置測位装置及び自車位置測位方法 | |
| RU2781373C1 (ru) | Способ коррекции собственного местоположения и устройство коррекции собственного местоположения |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230718 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240416 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240612 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240827 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240926 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7570038 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |