JP7576735B2 - モーションシミュレーション装置 - Google Patents
モーションシミュレーション装置 Download PDFInfo
- Publication number
- JP7576735B2 JP7576735B2 JP2021544848A JP2021544848A JP7576735B2 JP 7576735 B2 JP7576735 B2 JP 7576735B2 JP 2021544848 A JP2021544848 A JP 2021544848A JP 2021544848 A JP2021544848 A JP 2021544848A JP 7576735 B2 JP7576735 B2 JP 7576735B2
- Authority
- JP
- Japan
- Prior art keywords
- motion
- assembly
- relative
- simulation device
- freedom
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000033001 locomotion Effects 0.000 title claims description 278
- 238000004088 simulation Methods 0.000 title claims description 78
- 239000000758 substrate Substances 0.000 claims description 39
- 230000000712 assembly Effects 0.000 claims description 9
- 238000000429 assembly Methods 0.000 claims description 9
- 230000008859 change Effects 0.000 claims description 5
- 230000000295 complement effect Effects 0.000 claims 3
- 230000001133 acceleration Effects 0.000 description 34
- 230000001720 vestibular Effects 0.000 description 14
- 230000007246 mechanism Effects 0.000 description 10
- 241000239290 Araneae Species 0.000 description 8
- 238000006073 displacement reaction Methods 0.000 description 6
- 238000010586 diagram Methods 0.000 description 5
- 230000000694 effects Effects 0.000 description 4
- 230000007704 transition Effects 0.000 description 4
- 210000002414 leg Anatomy 0.000 description 3
- 238000000034 method Methods 0.000 description 3
- 210000000689 upper leg Anatomy 0.000 description 3
- 230000009471 action Effects 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 2
- 230000009699 differential effect Effects 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 210000003414 extremity Anatomy 0.000 description 2
- 230000005484 gravity Effects 0.000 description 2
- 230000003278 mimic effect Effects 0.000 description 2
- 230000008447 perception Effects 0.000 description 2
- 230000035807 sensation Effects 0.000 description 2
- 230000002459 sustained effect Effects 0.000 description 2
- 208000031427 Foetal heart rate deceleration Diseases 0.000 description 1
- 210000001015 abdomen Anatomy 0.000 description 1
- 238000007792 addition Methods 0.000 description 1
- 239000000969 carrier Substances 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 230000001186 cumulative effect Effects 0.000 description 1
- 230000002708 enhancing effect Effects 0.000 description 1
- 230000000977 initiatory effect Effects 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 238000005381 potential energy Methods 0.000 description 1
- 230000000272 proprioceptive effect Effects 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 238000005728 strengthening Methods 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images
























Classifications
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63G—MERRY-GO-ROUNDS; SWINGS; ROCKING-HORSES; CHUTES; SWITCHBACKS; SIMILAR DEVICES FOR PUBLIC AMUSEMENT
- A63G31/00—Amusement arrangements
- A63G31/16—Amusement arrangements creating illusions of travel
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B9/00—Simulators for teaching or training purposes
- G09B9/02—Simulators for teaching or training purposes for teaching control of vehicles or other craft
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B9/00—Simulators for teaching or training purposes
- G09B9/02—Simulators for teaching or training purposes for teaching control of vehicles or other craft
- G09B9/04—Simulators for teaching or training purposes for teaching control of vehicles or other craft for teaching control of land vehicles
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B9/00—Simulators for teaching or training purposes
- G09B9/02—Simulators for teaching or training purposes for teaching control of vehicles or other craft
- G09B9/04—Simulators for teaching or training purposes for teaching control of vehicles or other craft for teaching control of land vehicles
- G09B9/05—Simulators for teaching or training purposes for teaching control of vehicles or other craft for teaching control of land vehicles the view from a vehicle being simulated
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B9/00—Simulators for teaching or training purposes
- G09B9/02—Simulators for teaching or training purposes for teaching control of vehicles or other craft
- G09B9/08—Simulators for teaching or training purposes for teaching control of vehicles or other craft for teaching control of aircraft, e.g. Link trainer
- G09B9/12—Motion systems for aircraft simulators
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B9/00—Simulators for teaching or training purposes
- G09B9/02—Simulators for teaching or training purposes for teaching control of vehicles or other craft
- G09B9/08—Simulators for teaching or training purposes for teaching control of vehicles or other craft for teaching control of aircraft, e.g. Link trainer
- G09B9/12—Motion systems for aircraft simulators
- G09B9/14—Motion systems for aircraft simulators controlled by fluid actuated piston or cylinder ram
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63G—MERRY-GO-ROUNDS; SWINGS; ROCKING-HORSES; CHUTES; SWITCHBACKS; SIMILAR DEVICES FOR PUBLIC AMUSEMENT
- A63G31/00—Amusement arrangements
- A63G31/02—Amusement arrangements with moving substructures
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Business, Economics & Management (AREA)
- Physics & Mathematics (AREA)
- Educational Administration (AREA)
- Educational Technology (AREA)
- General Physics & Mathematics (AREA)
- Transmission Devices (AREA)
Description
「ピッチ」は、y軸を中心とした回転量である。
「ロール」は、x軸を中心とした回転量である。
「ヨー」は、z軸を中心とした回転量である。
「サージ」は、x軸に沿った加速または減速である。
「スウェイ」は、y軸に沿った加速度または減速度である。
「ヒーブ」は、z軸に沿った加速度または減速度である。
シミュレートされたモーション方向にシミュレータを加速する。つまり、線形加速を生成する。
シミュレータを垂直軸(z軸)から離れるようにピッチングすることによってユーザは結果的に生じる重力に対する方向の変化を、x軸に沿ってピッチ方向から離れる加速または減速として認識する。
モーションプラットフォームと、
前記モーションプラットフォームに搭載され、ユーザが搭乗するためのキャリアと、
固定端が基板上に回動可能に取り付けられて前記基板に対して動作の2自由度をもって回動するとともに、作用端がモーションプラットフォームに回動可能に接続されて前記モーションプラットフォームに対して動作の2自由度をもって回動する駆動アームと、
二本のガイドアームとを備え、前記ガイドアームのそれぞれは、下端が前記基板上に回動可能に取り付けられて基板に対して3自由度の動きで回転し、上端が前記モーションプラットフォームに回動可能に接続されて前記モーションプラットフォームに対して3自由度の動きで回転し、前記駆動アーム、前記ガイドアームおよび前記モーションプラットフォームは、前記基板に対して回動可能な動的フレームを画定し、その結果としての前記モーションプラットフォームの動きを前記キャリアに伝達可能である。
前記駆動軸の上側および下側ジョイントと前記ガイド支柱は、ほぼそれぞれの平面内に位置して、前記ベース組立体に対して回動可能な動的フレームを画定しており、結果として得られる前記ハブの動きが前記座席組立体に伝達されてもよい。
ベース組立体と、
前記ベース組立体の上方に配置された座席組立体であて、座席支持体と背面支持体とを備える前記座席組立体と、
前記背面支持体の頭部領域に固定されたハブと、
作動可能な上側コネクタと作動可能な下側コネクタとを有する駆動軸とを備え、前記上側コネクタは、前記ハブの補助コネクタと係合し、前記駆動軸に対する前記ハブの動きを回転2自由度に制限する上側ジョイントを画定し、前記下側コネクタは、前記ベース組立体の補助コネクタと係合し、前記ベース組立体に対する前記駆動軸の動きを回転2自由度に制限する下側ジョイントを画定し、
二本のガイド支柱のそれぞれは、前記駆動軸のそれぞれの側に配置され、動作可能な上側コネクタと動作可能な下側コネクタとを備えており、前記上側コネクタは、前記ハブの補助コネクタと係合し、前記各ガイド支柱に対する前記ハブの3自由度の動きによる回転運動を許容する上側ジョイントを画定し、前記下側コネクタはそれぞれ、前記ベース組立体の補助コネクタと係合し、前記ベース組立体に対する前記各ガイド支柱の3自由度の動きによる回転運動を許容する下側ジョイントを画定し、
二つの線形アクチュエータを備え、前記アクチュエータは、前記駆動軸の前記下側ジョイントが位置する作動垂直面の両側に位置しており、前記各線形アクチュエータは前記ベース組立体と前記座席組立体とを相互接続することを特徴とする。
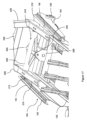
背面支持体214は、支持アーム216(例えば、図17参照)のそれぞれの後端から延在する2本のアーム228を含んでいる。支持アーム228は、動作可能となるように上方に収束する。支持アーム228の間の位置または各支持アーム228の下端付近には、バッククロスブレース230(例えば、図10参照)が延在している。
したがって、駆動軸238には、2つのモーション制約があり、各支柱256には、1つのモーション制約があり、各アクチュエータ262には、1つのモーション制約がある。したがって、システムには6つのモーション制約がある。
Claims (20)
- モーションシミュレーション装置であって、
モーションプラットフォームと、
前記モーションプラットフォームに搭載され、ユーザが搭乗するためのキャリアと、
下端が基板上に回動可能に取り付けられて前記基板に対して動作の2自由度をもって回動するとともに、上端がモーションプラットフォームに回動可能に接続されて前記モーションプラットフォームに対して動作の2自由度をもって回動する駆動アームと、
2本のガイドアームと、
を備え、
前記2本のガイドアームのそれぞれは、下端が前記基板上に回動可能に取り付けられて基板に対して3自由度の動きで回動し、上端が前記モーションプラットフォームに回動可能に接続されて前記モーションプラットフォームに対して3自由度の動きで回動し、
前記駆動アームと前記2本のガイドアームとは、前記基板と、前記2本のガイドアームのそれぞれから延在する線が交差する箇所において発生する点である仮想回動点との間に前記モーションプラットフォームが介在した状態で、前記駆動アーム及び前記2本のガイドアームのそれぞれの長手方向の軸が前記仮想回動点で交差するように、前記基板から前記モーションプラットフォームに向かって互いに傾斜しており、
前記駆動アーム、前記2本のガイドアームおよび前記モーションプラットフォームは、前記基板に対して回動可能な動的フレームを画定し、その結果としての前記モーションプラットフォームの動きを前記キャリアに伝達可能であることを特徴とする。 - 請求項1に記載のモーションシミュレーション装置であって、
前記駆動アームは、前記2本のガイドアームに対して前方に位置していることを特徴とする。 - 請求項2に記載のモーションシミュレーション装置であって、
前記駆動アーム及び前記2本のガイドアームのそれぞれの端部が位置する各平面は、互いに角度的にオフセットされており、前記駆動アームがそれぞれの前記平面の前記角度的なオフセットに対応して回転するにつれて、前記動的フレームの前記回転によって前記駆動アームが前記モーションプラットフォームに回転を与えることを特徴とする。 - 請求項1に記載のモーションシミュレーション装置であって、
前記モーションシミュレーション装置は、2つのアクチュエータを含み、
前記2つのアクチュエータのそれぞれは、直線的に固定された端部であって、前記基板に対して少なくとも回転2自由度で回動するように前記基板に回動可能に取り付けられた端部と、前記キャリアに対して回転3自由度で回動可能に取り付けられ、前記2本のガイドアームのそれぞれが前記2つのアクチュエータの間に挿入された作用端とを有することを特徴とする。 - 請求項4に記載のモーションシミュレーション装置であって、
前記2つのアクチュエータは、それぞれの前記直線的に固定された端部から前記作用端にかけて互いに収束することを特徴とする。 - 請求項1に記載のモーションシミュレーション装置であって、
前記2本のガイドアームは、略同じ長さであることを特徴とする。 - 請求項1に記載のモーションシミュレーション装置であって、
ベース組立体を備え、前記キャリアは前記ベース組立体の上方に配置された座席組立体を含み、前記座席組立体は座席支持体と背面支持体とを備えていることを特徴とする。 - 請求項7に記載のモーションシミュレーション装置であって、
前記モーションプラットフォームは、前記背面支持体の頭部領域に固定されたハブを含んでおり、
前記駆動アームは、作動可能な上側コネクタと作動可能な下側コネクタとを有する駆動軸であり、
前記上側コネクタは、前記ハブの補助コネクタと係合し、前記駆動軸に対する前記ハブの動きを回転2自由度に制限する上側ジョイントを提供し、
前記下側コネクタは、前記ベース組立体の補助コネクタと係合し、前記ベース組立体に対する前記駆動軸の動きを回転2自由度に制限する下側ジョイントを提供する。 - 請求項8に記載のモーションシミュレーション装置であって、
前記2本のガイドアームは2本のガイド支柱であり、
前記2本のガイド支柱は前記駆動軸の左右両側に配置され、動作可能な上側コネクタと動作可能な下側コネクタとを備えており、
前記上側コネクタは、前記ハブの補助コネクタと係合し、前記各ガイド支柱に対する前記ハブの3自由度の動きによる回転運動を許容する上側ジョイントを提供し、
前記下側コネクタはそれぞれ、前記ベース組立体の補助コネクタと係合し、前記ベース組立体に対して、前記各ガイド支柱に対する前記ハブの3自由度の動きによる回転運動を許容する下側ジョイントを提供する。 - 請求項9に記載のモーションシミュレーション装置であって、
2つの線形アクチュエータを備え、前記2つの線形アクチュエータのそれぞれは、前記駆動軸が左右いずれにも傾斜していないときに、前記駆動軸が位置する作動垂直面の両側に位置しており、前記2つの線形アクチュエータのそれぞれは前記ベース組立体と前記座席組立体とを相互接続することを特徴とする。 - 請求項9に記載のモーションシミュレーション装置であって、
前記駆動軸の上側および下側ジョイントと前記2本のガイド支柱は、ほぼそれぞれの平面内に位置して、前記ベース組立体に対して回動可能な動的フレームを画定しており、結果として得られる前記ハブの動きが前記座席組立体に伝達されることを特徴とする。 - 請求項9に記載のモーションシミュレーション装置であって、
前記ベース組立体の構成は、前記ベース組立体および前記ハブの相対的な角度方向を変更するように調整可能であり、その結果、前記動的フレームの回動によって、前記駆動軸が前記ハブに回転を与えてヨーをシミュレートすることを特徴とする。 - 請求項9に記載のモーションシミュレーション装置であって、
前記駆動軸の前記上側コネクタおよび前記ハブの前記補助コネクタは、前記駆動軸の上側ユニバーサルジョイントおよび前記下側コネクタによって提供され、前記ベース組立体の前記補助コネクタは、下側ユニバーサルジョイントによって提供されることを特徴とする。 - 請求項10に記載のモーションシミュレーション装置であって、
前記2つの線形アクチュエータのそれぞれは、その固定端において、前記2つの線形アクチュエータのそれぞれと前記ベース組立体との相対的な動きを少なくとも回転2自由度の動きに制限するジョイントによって前記ベース組立体に接続されていることを特徴とする。 - 請求項9に記載のモーションシミュレーション装置であって、
前記ベース組立体と前記座席組立体との間に配置されるコックピットフロアを備えていることを特徴とする。 - 請求項15に記載のモーションシミュレーション装置であって、
前記座席支持体と前記コックピットフロアとの間には、前記コックピットフロアに対して前記座席組立体が2自由度の動きで回転可能となるように、2自由度の動きをもって回転運動を与えるように構成されたジョイント組立体が配置されていることを特徴とする。 - 請求項16に記載のモーションシミュレーション装置であって、
2つの制御支柱組立体を備えており、前記各制御支柱組立体は、前記コックピットフロアの両側において、前記駆動軸と前記コックピットフロアとの間で回転2自由度の動きおよび並進3自由度の動きを許容するジョイントによって、前記駆動軸と前記コックピットフロアとを相互接続し前記コックピットフロアのロールを制限することを特徴とする。 - 請求項17に記載のモーションシミュレーション装置であって、
前記ベース組立体は、ベースと、前記ベースに取り付けられたドリフトフレームとを含み、
前記コックピットフロアと前記ベースとの間に介在するドリフトフレームを備えており、前記ドリフトフレームは、前記ベースに対して前記コックピットフロアが、前記座席組立体の前部に配置された作動垂直軸を中心として回動しやすくなるように構成されていることを特徴とする。 - 請求項18に記載のモーションシミュレーション装置であって、
前記ドリフトフレームは、一端が前記ベースに回動可能に接続され、反対側の端部が前記座席組立体の前方で前記コックピットフロアに接続されている揺動アームを含んでいることを特徴とする。 - 請求項18に記載のモーションシミュレーション装置であって、
前記ドリフトフレームは、前記コックピットフロアと前記ベースとの間に配置され、前記コックピットフロアの前後方向の動きを行いやすくする線形ベアリング組立体を備えていることを特徴とする。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| AU2019900285 | 2019-01-31 | ||
| AU2019900285A AU2019900285A0 (en) | 2019-01-31 | A Motion Simulation Apparatus | |
| PCT/AU2020/000010 WO2020154758A1 (en) | 2019-01-31 | 2020-01-31 | A motion simulation apparatus |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022523132A JP2022523132A (ja) | 2022-04-21 |
| JP7576735B2 true JP7576735B2 (ja) | 2024-11-01 |
Family
ID=71839874
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021544848A Active JP7576735B2 (ja) | 2019-01-31 | 2020-01-31 | モーションシミュレーション装置 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US11931662B2 (ja) |
| EP (1) | EP3917631B1 (ja) |
| JP (1) | JP7576735B2 (ja) |
| CN (1) | CN113573788B (ja) |
| AU (1) | AU2020216061B2 (ja) |
| CA (1) | CA3127954A1 (ja) |
| SG (1) | SG11202108218XA (ja) |
| WO (1) | WO2020154758A1 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| IT202000003101A1 (it) * | 2020-02-17 | 2021-08-17 | Marty & Nelly S R L | Supporto per simulatori di guida |
| JP7297151B2 (ja) * | 2020-07-03 | 2023-06-23 | 深▲せん▼怡豊自動化科技有限公司 | Agv娯楽運輸工具及び接続組立体 |
| TWI782596B (zh) | 2021-06-26 | 2022-11-01 | 智崴資訊科技股份有限公司 | 移動模擬裝置 |
| CN113457077B (zh) * | 2021-08-03 | 2022-04-26 | 太原理工大学 | 四自由度混联骑行运动模拟平台 |
| TWI807841B (zh) * | 2022-05-31 | 2023-07-01 | 智崴資訊科技股份有限公司 | 體感模擬裝置及致動系統 |
| SE547340C2 (en) * | 2022-12-01 | 2025-07-08 | Dalecarlia Dynamics Ab | Motion simulator |
| DE102023003232A1 (de) | 2023-08-05 | 2024-07-18 | Mercedes-Benz Group AG | Verfahren zur Beeinflussung der subjektiven Wahrnehmung von Beschleunigungen in Fahrzeugen oder Fahrsimulatoren sowie Fahrzeug und Fahrsimulator |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001511870A (ja) | 1996-12-27 | 2001-08-14 | トムソン−セーエスエフ | 物体に少なくとも3つの自由度の動きを与える駆動方法 |
| CN102750850A (zh) | 2012-06-06 | 2012-10-24 | 中国民航大学 | 一种三转动自由度混联驱动机构 |
| JP2016212236A (ja) | 2015-05-08 | 2016-12-15 | 株式会社アクセス | シミュレータ |
| JP2018116251A (ja) | 2017-01-19 | 2018-07-26 | 株式会社アイロック | 4輪自動車の運転シミュレータのシート支持機構 |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB1286028A (en) * | 1969-05-19 | 1972-08-16 | Singer Co | Vehicle motion simulator |
| US3619911A (en) * | 1969-05-19 | 1971-11-16 | Singer General Precision | Motion system |
| US3577659A (en) | 1969-08-06 | 1971-05-04 | Singer General Precision | Motion simulator actuator joint |
| US3967387A (en) * | 1974-10-21 | 1976-07-06 | Daniel Marchegiani | Motion simulator |
| US4321044A (en) | 1978-11-14 | 1982-03-23 | The Singer Company | Advanced G cueing system |
| US5431569A (en) * | 1993-08-27 | 1995-07-11 | Simpkins; Terry J. | Computer interactive motion simulator |
| US5597359A (en) * | 1995-10-26 | 1997-01-28 | Doron Precision Systems, Inc. | Audience motion platform |
| US5752834A (en) * | 1995-11-27 | 1998-05-19 | Ling; Shou Hung | Motion/force simulators with six or three degrees of freedom |
| US5954508A (en) | 1997-08-20 | 1999-09-21 | Interactive Motion Systems | Portable and compact motion simulator |
| JP3836601B2 (ja) * | 1998-05-11 | 2006-10-25 | 川田工業株式会社 | 複数自由度モーションベース |
| US20080124683A1 (en) | 2006-09-25 | 2008-05-29 | Pat Gregory Medford | Motion simulator system |
| WO2009082489A2 (en) | 2007-12-24 | 2009-07-02 | Robert Childress | Motion platform video game racing and flight simulator |
| CN102289965B (zh) | 2011-09-02 | 2013-06-12 | 浙江大学 | 一种具有重载宽频带响应的车辆驾驶模拟器 |
| CN103126362A (zh) | 2012-11-30 | 2013-06-05 | 大连理工计算机控制工程有限公司 | 一种电动动感座椅 |
| US9536446B2 (en) | 2012-12-03 | 2017-01-03 | Dynamic Motion Group Gmbh | Motion simulation system controller and associated methods |
| CN103144106B (zh) | 2013-03-13 | 2015-11-18 | 燕山大学 | 具有两转一移三自由度的非对称并联机构 |
| CN103394202B (zh) | 2013-08-16 | 2015-07-01 | 深圳环维文化旅游科技有限公司 | 多功能3自由度升降平台 |
| US9610511B1 (en) * | 2015-12-16 | 2017-04-04 | Disney Enterprises, Inc. | Amusement park ride vehicle including a chassis driven to have heave and sway motions |
| DE102016107239A1 (de) * | 2016-04-19 | 2017-10-19 | Simtec Systems Gmbh | Fahrgeschäft |
| CN108525292A (zh) | 2018-01-25 | 2018-09-14 | 电子科技大学 | 电机驱动的三自由度的家用型游戏运动模拟器 |
| KR102115287B1 (ko) * | 2018-12-19 | 2020-05-26 | 주식회사 모션디바이스 | 모션 시뮬레이터 |
-
2020
- 2020-01-31 SG SG11202108218XA patent/SG11202108218XA/en unknown
- 2020-01-31 JP JP2021544848A patent/JP7576735B2/ja active Active
- 2020-01-31 CN CN202080021616.0A patent/CN113573788B/zh active Active
- 2020-01-31 CA CA3127954A patent/CA3127954A1/en active Pending
- 2020-01-31 EP EP20748078.1A patent/EP3917631B1/en active Active
- 2020-01-31 US US17/310,297 patent/US11931662B2/en active Active
- 2020-01-31 AU AU2020216061A patent/AU2020216061B2/en active Active
- 2020-01-31 WO PCT/AU2020/000010 patent/WO2020154758A1/en not_active Ceased
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001511870A (ja) | 1996-12-27 | 2001-08-14 | トムソン−セーエスエフ | 物体に少なくとも3つの自由度の動きを与える駆動方法 |
| CN102750850A (zh) | 2012-06-06 | 2012-10-24 | 中国民航大学 | 一种三转动自由度混联驱动机构 |
| JP2016212236A (ja) | 2015-05-08 | 2016-12-15 | 株式会社アクセス | シミュレータ |
| JP2018116251A (ja) | 2017-01-19 | 2018-07-26 | 株式会社アイロック | 4輪自動車の運転シミュレータのシート支持機構 |
Non-Patent Citations (2)
| Title |
|---|
| 1000万円の配信環境!超リアル8軸シミュレーターとは?picar3,インターネット youtube,2019年11月22日,https://www.youtube.com/watch?v=Pt5ldXc4-yw |
| 簡易モーションプラットフォームおよびコンテンツ応用(第二報),電気学会研究会資料,一般社団法人電気学会,2018年12月26日,5-9 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3917631A1 (en) | 2021-12-08 |
| AU2020216061B2 (en) | 2024-11-21 |
| EP3917631C0 (en) | 2023-12-06 |
| AU2020216061A1 (en) | 2021-09-23 |
| WO2020154758A9 (en) | 2022-08-04 |
| US11931662B2 (en) | 2024-03-19 |
| WO2020154758A1 (en) | 2020-08-06 |
| US20220193561A1 (en) | 2022-06-23 |
| CN113573788B (zh) | 2025-04-25 |
| CA3127954A1 (en) | 2020-08-06 |
| EP3917631A4 (en) | 2022-03-30 |
| JP2022523132A (ja) | 2022-04-21 |
| EP3917631B1 (en) | 2023-12-06 |
| SG11202108218XA (en) | 2021-08-30 |
| CN113573788A (zh) | 2021-10-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7576735B2 (ja) | モーションシミュレーション装置 | |
| JP6599770B2 (ja) | 動作シミュレータ | |
| CN101842822B (zh) | 运动平台视频游戏赛车及飞行模拟器 | |
| JP5389268B2 (ja) | 可動プラットフォーム | |
| US20200035114A1 (en) | Seat support mechanism of driving simulator for four-wheeled automobile | |
| EP2960890A1 (en) | Motion simulator | |
| KR20040071147A (ko) | 운동모사장치 | |
| EP3278323B1 (en) | Motion arrangement | |
| KR102740194B1 (ko) | 모션 시뮬레이션 장치 | |
| KR102580729B1 (ko) | 모션 시뮬레이터 | |
| KR20180047469A (ko) | 게임 시뮬레이터 | |
| EP4145424B1 (en) | Motion simulator | |
| JP2022074987A (ja) | 揺動装置及びドライビングシミュレータ | |
| CN116919100B (zh) | 体感座椅及其骨架 | |
| US20250182645A1 (en) | Proprioception system for a driving simulator | |
| JP4349537B2 (ja) | シミュレータ | |
| TWI811126B (zh) | 移動模擬裝置 | |
| JP2026512627A (ja) | 運動発生装置 | |
| CN115770397A (zh) | 体感模拟器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230125 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20231128 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20231212 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20240311 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20240311 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20240311 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240408 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240531 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20240607 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240607 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20240607 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240711 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20240712 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7576735 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |