JP7579582B2 - 高密度自動保管および回収システム - Google Patents
高密度自動保管および回収システム Download PDFInfo
- Publication number
- JP7579582B2 JP7579582B2 JP2021569070A JP2021569070A JP7579582B2 JP 7579582 B2 JP7579582 B2 JP 7579582B2 JP 2021569070 A JP2021569070 A JP 2021569070A JP 2021569070 A JP2021569070 A JP 2021569070A JP 7579582 B2 JP7579582 B2 JP 7579582B2
- Authority
- JP
- Japan
- Prior art keywords
- tote
- row
- totes
- carrier
- robot carrier
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







































































Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65D—CONTAINERS FOR STORAGE OR TRANSPORT OF ARTICLES OR MATERIALS, e.g. BAGS, BARRELS, BOTTLES, BOXES, CANS, CARTONS, CRATES, DRUMS, JARS, TANKS, HOPPERS, FORWARDING CONTAINERS; ACCESSORIES, CLOSURES, OR FITTINGS THEREFOR; PACKAGING ELEMENTS; PACKAGES
- B65D21/00—Nestable, stackable or joinable containers; Containers of variable capacity
- B65D21/02—Containers specially shaped, or provided with fittings or attachments, to facilitate nesting, stacking, or joining together
- B65D21/0201—Containers specially shaped, or provided with fittings or attachments, to facilitate nesting, stacking, or joining together stackable or joined together side-by-side
- B65D21/0204—Containers specially shaped, or provided with fittings or attachments, to facilitate nesting, stacking, or joining together stackable or joined together side-by-side and joined together by interconnecting formations forming part of the container, e.g. dove-tail, snap connections, hook elements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/0407—Storage devices mechanical using stacker cranes
- B65G1/0435—Storage devices mechanical using stacker cranes with pulling or pushing means on either stacking crane or stacking area
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/0478—Storage devices mechanical for matrix-arrangements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/06—Storage devices mechanical with means for presenting articles for removal at predetermined position or level
- B65G1/08—Storage devices mechanical with means for presenting articles for removal at predetermined position or level the articles being fed by gravity
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G47/00—Article or material-handling devices associated with conveyors; Methods employing such devices
- B65G47/34—Devices for discharging articles or materials from conveyor
- B65G47/46—Devices for discharging articles or materials from conveyor and distributing, e.g. automatically, to desired points
- B65G47/51—Devices for discharging articles or materials from conveyor and distributing, e.g. automatically, to desired points according to unprogrammed signals, e.g. influenced by supply situation at destination
- B65G47/5104—Devices for discharging articles or materials from conveyor and distributing, e.g. automatically, to desired points according to unprogrammed signals, e.g. influenced by supply situation at destination for articles
- B65G47/5109—Devices for discharging articles or materials from conveyor and distributing, e.g. automatically, to desired points according to unprogrammed signals, e.g. influenced by supply situation at destination for articles first In - First Out systems: FIFO
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G35/00—Mechanical conveyors not otherwise provided for
- B65G35/06—Mechanical conveyors not otherwise provided for comprising a load-carrier moving along a path, e.g. a closed path, and adapted to be engaged by any one of a series of traction elements spaced along the path
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- Warehouses Or Storage Devices (AREA)
Description
本明細書で使用される際に、「キャリア」という用語は、トート支持および保管構造の周りで垂直、水平、または両方の方向に移動することができ、1つ以上のトートを受け入れ、搬送、および搬出することができる、局所的または遠隔的に制御されるロボットまたは機構を指す。
本明細書に記載される実施形態は、特定のトートを効率的に回収するため、またはトートを保管するために、保管構造からトートまたはその他の保管製品を操作するように協調して動作する複数のキャリアを利用する。プロセスは、単一の線形方向(正または負の方向)でトートの列の間で力が共有されることを可能にするトートまたはキャリアのシステムを利用するが、電気機械式アクチュエータを使用して、または列の縦軸線方向(正または負の方向)以外の方向に移動させることによって、トートが機械的に分離されることも可能にする。新規な技術は、目的のトート(および結果として、目的のトートに結合された全てのトート)を、列から分離され得る列の端部に向かって移動させるために、トートまたはその他の製品を両方向に操作することができる。
本発明の一態様は、保管構造内に保管するためのトートの様々な構成を対象とする。トートの第1の実施形態は図1の図(A)に示され、トートは、保管用の商品を受け入れるための容器構造100を具体化する。本発明の代替実施形態では、トートは、図3の図(A)に示されるように、結合および移動構成要素を有し、図3の図(B)に示されるように、商品または商品を積み重ねるための容器を受け入れることが可能な、平坦なプラットフォームとして構成されてもよい。
本発明の第2の態様は、トートが保管される保管構造を伴う。本発明は、保管構造の2つの基本的な構成を提供する。
このセクションでは、単層ボットおよび多層ボット保管構造と共に使用するためのキャリア構成が説明される。
トートの回収、保管、およびシャッフルに加えて、システムは、システムからトートを出力し、システムにトートを取り込むことが可能でなければならない。保管構造の両方の実施形態において、これは入力/出力機構を介して達成される。
本明細書に記載されるキャリアは、限られた範囲内の列にサービス提供できるようにするために目的の列の場所まで保管構造の1つまたは複数の外面に沿って、または保管構造の全面に沿って、移動することができる。このような保管構造は、多層構成で図29に示されている。
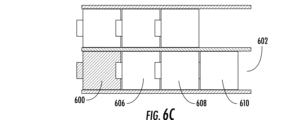
保管および回収プロセスをより効率的にする、いくつかの可能な最適化がある。図35は、このような最適化の1つを示す。このプロセスは、キャリアがトートを回収する方向を定義する。保管構造の両側にキャリアがあるので、トートは、回収のためにいずれかのキャリアに引っ張られることが可能である。最適化されたアルゴリズムは、トートをキャリアに移動させるために必要とされるプッシュ/プルサイクルの数を最小限に抑える。列の水平な層の上面図を示す図35の図(A)では、目的のトートは、底部キャリアよりも最上部キャリアに近く、したがって、最上部キャリアは列を引っ張り、7回のプル/シフトサイクルを使用してトートを回収することができるようになる。図(B)は、同様のケースを示すが、最上部キャリアの所望のトート間の列にギャップがある。このため、所望のトートが物理的に最上部キャリアに対してより近い位置にあっても、最上部キャリアは所望のトートを含む列の部分を引っ張ることができないので、列は底部キャリアによって引っ張られ、図(C)に示されるように、トートを底部キャリアに移動させるために13回のプル/シフトサイクルが必要となる。
図36は、このシステム内のトートを保管および回収するために使用される、保管および回収プロセスを管理および最適化するためのソフトウェアアーキテクチャの一実装形態を示す。倉庫実行システム(WES)3600は、保管されるトートの所望のキューおよび回収されるトートの所望のキューの両方を提供する。これらのキューの各々は、トート配置アルゴリズム3602にて処理される。これらのアルゴリズムは、ロボットキャリアの最大移動効率および保管構造内のトートの最適な配置/保管を含むがこれらに限定されないいくつかの要因に基づいて、キューを最適化および並べ替えする。トート配置アルゴリズム3602は、ロボットシステムコントローラに、トートを配置および/または回収するための(1つまたは複数の)所望の列を提供する。この情報は、動作経路を決定し、トートの保管および回収プロセスを実行するために、ロボットシステムコントローラ3604によって使用される。
Claims (20)
- トートの複数の列が保管される保管構造内でトートを配置および操作する方法であって、
第1のロボットキャリア上で第1の列の第1の端部から第1のトートを受け取るステップと、
第1のトートを第2の列に移動させるステップと、
第1のトートを第2の列の第1の端部に押し込むステップと、
第1のロボットキャリア上で第1の列の第1の端部から対象トートが受け取られるまで、方法を繰り返すステップと、
を備え、
第1のトートは、第1のロボットキャリアによる第1のトートへの引っ張り動作によって第1のロボットキャリア上で受け取られ、
引っ張り動作により、第1のトートに直接的または間接的に結合された第1の列のすべてのトートが第1の列の第1の端部に向かって移動し、
トートの第2の列には、1つ以上のトートの長さの単一のギャップが存在し、該ギャップは、第2の列を、第2の列の第1の端部に位置する第1のセグメントと、第1の端部とは反対側の第2の列の第2の端部に位置する第2のセグメントとに分割し、
トートを第2の列の第1の端部に繰り返し押し込むと、第1のセグメントと第2のセグメントが互いに結合されるまで、ギャップが1つのトート長さ分だけ減少する、方法。 - 方法は、対象のトートが第1の列から受け取られるまで繰り返される、請求項1に記載の方法。
- 対象のトートを、保管システムの出口ポイントに移動するステップをさらに備える、請求項2に記載の方法。
- 第1の列の第1の端部から第1のロボットキャリア上で受け取られた第1のトートは、トートを第1のロボットキャリア上の第1の位置から第1のロボットキャリア上の第2の位置にシフトさせることによって第2の列の第1の端部と位置合わせされる、請求項1に記載の方法。
- 第1の列の第1の端部から第1のロボットキャリア上で受け取られた第1のトートは、第1のロボットキャリアを第2の列に移動させることによって第2の列の第1の端部に位置合わせされる、請求項1に記載の方法。
- 第1のトートを第2の列の第1の端部に押し込むことにより、第1のトートが第2の列の第1の端部に既に存在するトートに自動的に結合機構を介して結合される、請求項1に記載の方法。
- 第1のトートを第2の列に移動させることで、第1のトートを第1の列内の別のトートから分離するように、自動的に結合機構を解放する、請求項1に記載の方法。
- 第1のロボットキャリア上の第1の位置から第1のロボットキャリア上の第2の位置へ第1のトートをシフトすることは、第1の列の縦軸線に対して垂直な方向における第1のトートの移動によって、第1の列内の次のトートから第1のトートを分離する、請求項4に記載の方法。
- 第1のロボットキャリア上の第1の位置から第2の位置への第1のトートの移動は、第1のトートを第2の列内の別のトートに結合させるように、自動的に結合機構を係合させる、請求項8に記載の方法。
- 第1の列から第2の列への第1のロボットキャリアの移動は、第1の列の縦軸線に対して垂直な方向における第1のトートの移動によって、第1の列の別のトートから第1のトートを分離するように、自動的に結合機構を解放する、請求項5に記載の方法。
- 第2の列は満たされておらず、さらに、第2のトートは、第2の列を満たすのに十分に第1のロボットキャリアがいくつかのトートを第2の列に押し込んでしまうまで、第2の列の第2の端部から押し出されない、請求項2に記載の方法。
- トートを第2の列の第1の端部に押し込むことにより、第1のトートに直接または間接的に結合されたすべてのトートが第2の列の第2の端部に向かって移動する、請求項1に記載の方法。
- 第2の列が満たされており、第2の列の第1の端部にトートを押し込むことにより、第2のトートが第2の列の第2の端部から押し出され、方法がさらに、
第2の列の第2の端部から第2のトートを受け取るステップを備える、請求項12に記載の方法。 - 第2のトートが、第2のロボットキャリアによって第2の列から受け取られる、請求項13に記載の方法。
- 第2の列の第2の端部から第2のロボットキャリア上で受け取られた第2のトートは、トートを第2のロボットキャリア上の第1の位置から第2のロボットキャリア上の第2の位置へとシフトさせることによって、第1の列の第2の端部と位置合わせされる、請求項14に記載の方法。
- 第2の列の第2の端部から第2のロボットキャリア上で受け取られた第2のトートは、第2のロボットキャリアを第1の列に移動させることによって、第1の列の第2の端部と位置合わせされる、請求項14に記載の方法。
- 方法はさらに、
第2のトートを第1の列に移動させるステップと、
第2のトートを第1の列の第2の端部に押し込むステップと、
を備え、
第2のトートを第1の列の第2の端部に押し込むことにより、第2のトート上の結合機構が第1の列の第2の端部のトート上の結合機構と係合する、請求項13に記載の方法。 - 第1の列が満たされており、第1の列の第2の端部に第2のトートを押し込むことにより、第3のトートが第1の列の第1の端部から押し出され、方法がさらに、
第1の列の第1の端部から第3のトートを受け取るステップを備える、請求項17に記載の方法。 - 第3のトートが、第1のロボットキャリアによって受け取られる、請求項18に記載の方法。
- トートの複数の列が保管される保管構造内でトートを配置および操作する方法であって、前記方法は、
第1の列の第1の端部から第1のトートを受け取るステップと、
第1のトートを第2の列に移動させるステップと、
第1のトートを第2の列の第1の端部に押し込むステップであって、第1のトートを第2の列の第1の端部に押し込むことで、第2のトートを第2の列の第2の端部から押し出させるステップと、
第2の列の第2の端部から第2のトートを受け取るステップと、
を備え、
第1の列の第1の端部から第1のトートを受け取るステップが、第1の列の第1の端部から第1のトートを引っ張るステップを含み、1つ以上の結合されたトートを第1の列の第1の端部に向かって移動させるように、或る列の中の1つ以上のトートが互いに結合され、
トートの第2の列には、1つ以上のトートの長さの単一のギャップが存在し、該ギャップは、第2の列を、第2の列の第1の端部に位置する第1のセグメントと、第1の端部とは反対側の第2の列の第2の端部に位置する第2のセグメントとに分割し、
トートを第2の列の第1の端部に繰り返し押し込むと、第1のセグメントと第2のセグメントが互いに結合されるまで、ギャップが1つのトート長さ分だけ減少する、方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201962850191P | 2019-05-20 | 2019-05-20 | |
| US62/850,191 | 2019-05-20 | ||
| PCT/US2020/033790 WO2020236926A1 (en) | 2019-05-20 | 2020-05-20 | High-density automated storage and retrieval system |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022537890A JP2022537890A (ja) | 2022-08-31 |
| JP7579582B2 true JP7579582B2 (ja) | 2024-11-08 |
Family
ID=73458233
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021569070A Active JP7579582B2 (ja) | 2019-05-20 | 2020-05-20 | 高密度自動保管および回収システム |
Country Status (8)
| Country | Link |
|---|---|
| US (4) | US12091244B2 (ja) |
| EP (2) | EP3972912A4 (ja) |
| JP (1) | JP7579582B2 (ja) |
| AU (1) | AU2020279749B2 (ja) |
| BR (1) | BR112021023255A2 (ja) |
| CA (1) | CA3141487A1 (ja) |
| MX (1) | MX2021014203A (ja) |
| WO (2) | WO2020236926A1 (ja) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AU2020279749B2 (en) | 2019-05-20 | 2026-02-05 | Carnegie Mellon University | High-density automated storage and retrieval system |
| GB202015589D0 (en) * | 2020-10-01 | 2020-11-18 | Ocado Innovation Ltd | Container storage and retrieval system |
| NO346601B1 (en) * | 2021-02-08 | 2022-10-24 | Autostore Tech As | Grid Survey Module |
| NO20220030A1 (no) * | 2022-01-08 | 2023-07-10 | Novaretail AS | En lagerkassebane og et lagerkassesystem |
| CN114987903A (zh) * | 2022-06-23 | 2022-09-02 | 威海海洋职业学院 | 一种医疗器械储存箱及医疗器械储存设备 |
| WO2024000069A1 (en) * | 2022-06-28 | 2024-01-04 | Reid Frederick | Nested 3d storage |
| US20250353679A1 (en) * | 2022-07-27 | 2025-11-20 | Carnegie Mellon University | High-density automated storage and retrieval system having pseudo-continuous motion |
| CN115649730B (zh) * | 2022-11-10 | 2025-05-30 | 浙江立镖机器人有限公司 | 装卸货物设备从货架上拉货的控制方法 |
| EP4371905A1 (en) * | 2022-11-16 | 2024-05-22 | i-Collector Holding B.V. | A storage and order collection apparatus |
| EP4622777A1 (en) * | 2022-11-22 | 2025-10-01 | Carnegie Mellon University | Systems and methods for controlling a high-density automated storage and retrieval system having pseudo-continuous motion |
| FR3146886B1 (fr) * | 2023-03-24 | 2025-04-11 | Galam Robotics | Système modulaire de stockage et procédé d’extraction d’éléments stockés dans un tel système |
| DE102023134767B4 (de) * | 2023-12-12 | 2025-06-18 | Ssi Schäfer Automation Gmbh | Insektenaufzuchtsystem |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20130129455A1 (en) | 2010-08-03 | 2013-05-23 | I-Collector Holding B.V. | Storage and order collection system |
| JP2017536314A (ja) | 2014-10-27 | 2017-12-07 | 深▲せん▼市鯨倉科技有限公司Shenzhen Whalehouse Technology Company Limited | 自動集約型倉庫装置 |
Family Cites Families (65)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2864515A (en) * | 1954-04-19 | 1958-12-16 | John R Mckinley | Automobile parking apparatus |
| US3662905A (en) | 1967-03-23 | 1972-05-16 | Hitachi Ltd | Storage pallets and drive means thereof |
| US3508495A (en) | 1967-08-28 | 1970-04-28 | Telecarrier Corp | Automatic vehicle-transporting systems |
| US3805973A (en) | 1968-06-14 | 1974-04-23 | Interlake Steel Corp | Storage and retrieval arrangement |
| US3927773A (en) | 1972-06-19 | 1975-12-23 | Thomas John Robert Bright | Load storage system and apparatus therefor |
| US4389157A (en) * | 1981-07-09 | 1983-06-21 | Sps Technologies, Inc. | Retrieval and storage mechanism for use with an automated rotating storage unit |
| JPS58100003A (ja) * | 1981-12-03 | 1983-06-14 | Nippon Filing Co Ltd | コンテナ格納装置 |
| JPS5978305A (ja) | 1982-10-27 | 1984-05-07 | Konishiroku Photo Ind Co Ltd | 合成樹脂製ペンタプリズム |
| JPS5978305U (ja) * | 1982-11-17 | 1984-05-26 | 四柳 準治 | 入庫出庫装置 |
| DE3466866D1 (en) | 1983-07-20 | 1987-11-26 | Paul Truninger | Loading device for elongate objects |
| CH666668A5 (de) * | 1985-07-05 | 1988-08-15 | Dytan Stahl & Maschbau Ag | Hochregallager. |
| JPS63122551U (ja) * | 1987-01-30 | 1988-08-09 | ||
| DE3840256A1 (de) * | 1988-11-25 | 1990-05-31 | Mannesmann Ag | Transportvorrichtung mit einer fliessfertigungssstrasse |
| DE3920405C1 (ja) * | 1989-06-22 | 1990-03-29 | Goldschmidt, Sol, Zuerich, Ch | |
| JPH03125707U (ja) * | 1989-12-28 | 1991-12-19 | ||
| JPH0442104U (ja) * | 1990-08-10 | 1992-04-09 | ||
| US5179265A (en) | 1990-08-21 | 1993-01-12 | United Electric Controls Company | Cooking time control system for conveyor ovens |
| BR9305733A (pt) * | 1992-11-12 | 1997-01-28 | Alexander Jun Faller | Aparelho para armazenar objetos em um bloco de armazenagem |
| ES2069491B1 (es) * | 1993-07-07 | 1998-06-01 | Univ Catalunya Politecnica | Par de asas adosables a cajas para almacenamiento automatico en profundidad. |
| NL1002840C2 (nl) | 1995-10-26 | 1997-05-02 | Ebm Techniek Bv | Inrichting en werkwijze voor tijdelijk opslaan of bufferen van produkten. |
| JP2003063612A (ja) * | 2001-08-21 | 2003-03-05 | Nippon Yusoki Co Ltd | コンテナ並びにこのコンテナを用いた自動倉庫及び搬入出方法 |
| JP2003211327A (ja) | 2002-01-15 | 2003-07-29 | Ihi Marine United Inc | 構造体の製造ライン設備 |
| US6923612B2 (en) | 2002-03-29 | 2005-08-02 | TGW Transportgeräte GmbH & Co. KG | Load-handling system and telescopic arm therefor |
| JP4452856B2 (ja) * | 2002-08-22 | 2010-04-21 | 伊東電機株式会社 | 立体倉庫装置及び立体倉庫の収納物品搬送方法 |
| GB0415307D0 (en) * | 2004-07-08 | 2004-08-11 | Rts Thurnall Plc | Automated store |
| US8397897B2 (en) | 2007-01-25 | 2013-03-19 | Bastian Solutions, Llc | Vertical spiral multilevel sorter and merge conveyor for three dimensional automated pick module |
| JP5278724B2 (ja) | 2007-07-26 | 2013-09-04 | 株式会社ダイフク | 物品収納設備 |
| US9511830B2 (en) | 2008-05-12 | 2016-12-06 | Mary A. Corcoran | High density storage facility |
| NL1036512C2 (nl) | 2009-02-04 | 2010-08-12 | Ferdar Automation Technology Nederland B V | Opslag- en orderverzamelsysteem. |
| US20100230408A1 (en) * | 2009-03-16 | 2010-09-16 | Yaffa Licari | System for interconnecting covered under-bed storage boxes |
| NL1038714C2 (nl) * | 2011-03-30 | 2012-10-02 | Ferdar Automation Technology Nederland B V | Opslag- en/of orderverzamelsysteem. |
| US9334114B2 (en) | 2011-11-20 | 2016-05-10 | Illinois Tool Works Inc. | Storage system and methods |
| US9701471B2 (en) | 2012-08-31 | 2017-07-11 | Murata Machinery, Ltd. | Transfer device |
| NO337145B1 (no) | 2014-02-05 | 2016-02-01 | Storepal Systems As | Lagringssystem |
| US9465390B2 (en) | 2014-11-11 | 2016-10-11 | Google Inc. | Position-controlled robotic fleet with visual handshakes |
| US9639824B1 (en) | 2014-12-22 | 2017-05-02 | Amazon Technologies, Inc. | Dynamically-sized containers for inventory system |
| NL1041164B1 (nl) * | 2015-01-30 | 2016-10-12 | I-Collector Holding B V | Inrichting en werkwijze voor het beheren van de opslag van artikelen. |
| FR3051948B1 (fr) * | 2016-05-30 | 2021-01-01 | Savoye | Systeme de stockage tampon et de sequencement de charges comprenant deux elevateurs. |
| WO2018068024A1 (en) | 2016-10-06 | 2018-04-12 | Doerfer Corporation | Automated warehouse fulfillment operations and system |
| US10322878B2 (en) | 2017-07-21 | 2019-06-18 | Amazon Technologies, Inc. | Storage module having inventory carriers that are elongate along a lateral direction to carry a plurality of storage containers |
| US10287097B2 (en) | 2017-07-21 | 2019-05-14 | Amazon Technologies, Inc. | Modular storage system having segments that couple to one another to define closed loop tracks that move inventory |
| US11358793B2 (en) | 2017-01-17 | 2022-06-14 | Amazon Technologies, Inc. | Stackable inventory storage modules, storage systems, and methods of using the same |
| SG11201907618RA (en) | 2017-02-24 | 2019-09-27 | Opex Corp | Automated storage and retrieval systems and methods |
| CN114852726B (zh) | 2017-03-20 | 2024-01-02 | 伯克希尔格雷营业股份有限公司 | 用于处理包括运输车辆的物体的系统和方法 |
| JP6729491B2 (ja) | 2017-05-25 | 2020-07-22 | 株式会社ダイフク | 物品移載装置 |
| US10196208B1 (en) | 2017-09-29 | 2019-02-05 | Amazon Technologies, Inc. | Inventory storage module having a closed conveying loop in a horizontal plane |
| US10807798B1 (en) | 2017-10-31 | 2020-10-20 | Amazon Technologies, Inc. | Inventory storage module having actuators that move storage totes around a conveyor loop |
| JP7052995B2 (ja) * | 2017-11-13 | 2022-04-12 | Necエンベデッドプロダクツ株式会社 | 搬送システム、制御装置、制御方法及びプログラム |
| US10543942B2 (en) | 2017-11-21 | 2020-01-28 | Fulfil Solutions, Inc. | Product handling and packaging system |
| US10793355B1 (en) | 2018-04-06 | 2020-10-06 | Amazon Technologies, Inc. | Inventory storage module with robotic transport system |
| CN110466927B (zh) * | 2018-05-09 | 2021-01-12 | 菜鸟智能物流控股有限公司 | 一种仓库及仓库的储物对象、货架处理方法 |
| EP4495030A3 (en) * | 2018-06-08 | 2025-04-02 | Attabotics Inc. | Improved storage and retrieval systems |
| US10913603B1 (en) | 2018-07-17 | 2021-02-09 | Amazon Technologies, Inc. | Stackable inventory storage module having helical drive |
| US10781043B1 (en) | 2018-11-15 | 2020-09-22 | Amazon Technologies, Inc. | Multi-directional elevator for an inventory storage system |
| WO2020104568A1 (en) | 2018-11-22 | 2020-05-28 | Pick8Ship Technology Ag | Cargo transport vehicle and cargo logistics system |
| US11119487B2 (en) | 2018-12-31 | 2021-09-14 | Staples, Inc. | Automated preparation of deliveries in delivery vehicles using automated guided vehicles |
| US10919747B2 (en) | 2019-01-22 | 2021-02-16 | Amazon Technologies, Inc. | Inventory conveyance system that transfers storage containers to and from a vertically arranged array of storage containers |
| AU2020279749B2 (en) | 2019-05-20 | 2026-02-05 | Carnegie Mellon University | High-density automated storage and retrieval system |
| AU2020339816B2 (en) | 2019-08-26 | 2024-08-15 | Lafayette Systems Canada ULC | Multi-zone automated storage and retrieval system |
| JP7410615B2 (ja) | 2019-09-03 | 2024-01-10 | キヤノン株式会社 | 加工システム、および物品の製造方法 |
| CN113401548B (zh) | 2020-03-16 | 2023-07-11 | 因特利格雷特总部有限责任公司 | 用于多深度存放架的自动化穿梭车系统 |
| US12258216B2 (en) | 2020-06-11 | 2025-03-25 | Nimble Robotics, Inc. | Automated delivery vehicle |
| WO2022086932A1 (en) | 2020-10-19 | 2022-04-28 | Monotony.ai, Inc. | Autonomous multi-tier racking and retrieval system for delivery vehicle |
| US12330891B2 (en) | 2021-05-03 | 2025-06-17 | United Parcel Service Of America, Inc. | Systems, methods, and apparatuses for loading, securing, transporting, and depositing objects |
| JP7655269B2 (ja) | 2022-05-02 | 2025-04-02 | トヨタ自動車株式会社 | 車載荷役システム、スタッカ、および、荷物の受け渡し方法 |
-
2020
- 2020-05-20 AU AU2020279749A patent/AU2020279749B2/en active Active
- 2020-05-20 EP EP20808276.8A patent/EP3972912A4/en active Pending
- 2020-05-20 JP JP2021569070A patent/JP7579582B2/ja active Active
- 2020-05-20 MX MX2021014203A patent/MX2021014203A/es unknown
- 2020-05-20 CA CA3141487A patent/CA3141487A1/en active Pending
- 2020-05-20 US US17/610,211 patent/US12091244B2/en active Active
- 2020-05-20 BR BR112021023255A patent/BR112021023255A2/pt not_active Application Discontinuation
- 2020-05-20 WO PCT/US2020/033790 patent/WO2020236926A1/en not_active Ceased
- 2020-12-28 US US17/915,213 patent/US11866253B2/en active Active
- 2020-12-28 WO PCT/US2020/067174 patent/WO2021236164A1/en not_active Ceased
- 2020-12-28 EP EP20936541.0A patent/EP4153513A4/en active Pending
-
2023
- 2023-11-14 US US18/508,380 patent/US12454409B2/en active Active
- 2023-11-14 US US18/508,371 patent/US12448209B2/en active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20130129455A1 (en) | 2010-08-03 | 2013-05-23 | I-Collector Holding B.V. | Storage and order collection system |
| JP2017536314A (ja) | 2014-10-27 | 2017-12-07 | 深▲せん▼市鯨倉科技有限公司Shenzhen Whalehouse Technology Company Limited | 自動集約型倉庫装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| BR112021023255A2 (pt) | 2022-01-04 |
| US12448209B2 (en) | 2025-10-21 |
| JP2022537890A (ja) | 2022-08-31 |
| EP3972912A4 (en) | 2023-04-26 |
| US20240101348A1 (en) | 2024-03-28 |
| WO2021236164A1 (en) | 2021-11-25 |
| US12454409B2 (en) | 2025-10-28 |
| EP4153513A1 (en) | 2023-03-29 |
| CA3141487A1 (en) | 2020-11-26 |
| MX2021014203A (es) | 2022-01-31 |
| WO2020236926A1 (en) | 2020-11-26 |
| US20230139228A1 (en) | 2023-05-04 |
| US11866253B2 (en) | 2024-01-09 |
| AU2020279749B2 (en) | 2026-02-05 |
| US20240101347A1 (en) | 2024-03-28 |
| AU2020279749A1 (en) | 2022-01-27 |
| US20220219899A1 (en) | 2022-07-14 |
| EP4153513A4 (en) | 2024-05-22 |
| EP3972912A1 (en) | 2022-03-30 |
| US12091244B2 (en) | 2024-09-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7579582B2 (ja) | 高密度自動保管および回収システム | |
| JP7225310B2 (ja) | 物品の保管、取り扱い、及び回収システム及び方法 | |
| JP7399924B2 (ja) | アイテムをピッキングするためのシステム及び方法 | |
| JP2024059556A (ja) | 保管・出庫システム | |
| CN108064212B (zh) | 带有两套互连的轨道体系的自动化存取系统 | |
| JP2022031782A (ja) | 保管システムからユニットを取り出すための方法及び装置 | |
| JP7654892B2 (ja) | ピッキングステーション | |
| JP2004018183A (ja) | 多種小ロット対応無人搬送車 | |
| CN117642344A (zh) | 拣选站 | |
| WO2025133000A1 (en) | Storage and retrieval system and method | |
| WO2025050097A1 (en) | Automated inventory management system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220120 |
|
| A529 | Written submission of copy of amendment under article 34 pct |
Free format text: JAPANESE INTERMEDIATE CODE: A529 Effective date: 20220113 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220506 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230601 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230704 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230926 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240109 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20240404 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240612 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240924 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20241021 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7579582 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |