JP7585512B2 - センサデータ予測 - Google Patents
センサデータ予測 Download PDFInfo
- Publication number
- JP7585512B2 JP7585512B2 JP2023550201A JP2023550201A JP7585512B2 JP 7585512 B2 JP7585512 B2 JP 7585512B2 JP 2023550201 A JP2023550201 A JP 2023550201A JP 2023550201 A JP2023550201 A JP 2023550201A JP 7585512 B2 JP7585512 B2 JP 7585512B2
- Authority
- JP
- Japan
- Prior art keywords
- data
- head
- processors
- angular velocity
- listening device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04R—LOUDSPEAKERS, MICROPHONES, GRAMOPHONE PICK-UPS OR LIKE ACOUSTIC ELECTROMECHANICAL TRANSDUCERS; ELECTRIC HEARING AIDS; PUBLIC ADDRESS SYSTEMS
- H04R1/00—Details of transducers, loudspeakers or microphones
- H04R1/10—Earpieces; Attachments therefor ; Earphones; Monophonic headphones
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04S—STEREOPHONIC SYSTEMS
- H04S7/00—Indicating arrangements; Control arrangements, e.g. balance control
- H04S7/30—Control circuits for electronic adaptation of the sound field
- H04S7/302—Electronic adaptation of stereophonic sound system to listener position or orientation
- H04S7/303—Tracking of listener position or orientation
- H04S7/304—For headphones
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Acoustics & Sound (AREA)
- Signal Processing (AREA)
- Stereophonic System (AREA)
- User Interface Of Digital Computer (AREA)
- Circuit For Audible Band Transducer (AREA)
Description
本願は、参照により全体がここに組み込まれる、2021年3月19日に出願した国際PCT出願番号第PCT/CN2021/081747号、及び2021年4月21日に出願した米国仮特許出願番号第63/177,441号、の優先権を主張する。
本開示は、オーディオ処理の方法に関する。

本発明は、限定ではないが、本発明の幾つかの部分の構造、特徴、及び機能を記載する以下の列挙される例示的な実施形態(Enumerated Example Embodiments (EEEs))を含む本願明細書に記載された形式のうちのいずれかにおいて具現化されてよい。
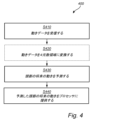
頭部搭載リスニング装置の動きを表す動きデータを受信するステップと、
前記動きデータを4元数領域に変換するステップと、
1つ以上のプロセッサによって、前記頭部搭載リスニング装置の将来の動きを予測するステップであって、変換された動きデータから角加速度データを作成し、前記角加速度データに1つ以上の平滑化フィルタを適用することを含み、予測した将来の動きは、前記4元数領域内の対応する軸の周りの回転角を含む、ステップと、
前記リスニング装置によって提示される音場が前記頭部搭載リスニング装置の予測された動きに従うように前記音場を調整するために、前記頭部搭載リスニング装置の予測された将来の動きをプロセッサに提供するステップと、
を含む方法。
1つ以上のプロセッサと、
命令を格納する非一時的コンピュータ可読媒体であって、前記命令は、前記1つ以上のプロセッサにより実行されると、前記1つ以上のプロセッサにEEE1~12のいずれか一項に記載の方法を実行させる、非一時的コンピュータ可読記憶媒体と、
を含むシステム。
Claims (14)
- オーディオ処理の方法であって、
頭部搭載リスニング装置の動きを表す動きデータを受信するステップと、
前記動きデータを4元数領域に変換するステップと、
1つ以上のプロセッサによって、前記頭部搭載リスニング装置の将来の動きを予測するステップであって、変換された動きデータから角加速度データを作成し、前記角加速度データに1つ以上の平滑化フィルタを適用することを含み、予測した将来の動きは、前記4元数領域における対応する軸の周りの回転角を含む、ステップと、
前記頭部搭載リスニング装置によって提示される音場が前記頭部搭載リスニング装置の予測された動きに従うように前記音場を調整するために、前記頭部搭載リスニング装置の予測された将来の動きをプロセッサに提供するステップと、
を含む方法。 - 前記予測するステップは、前記角加速度データに再帰線形平滑ニュートンフィルタを適用することを含む、請求項1に記載の方法。
- 前記予測するステップは、前記変換された動きデータから角速度データを作成することを含む、請求項1に記載の方法。
- 前記角速度データを作成することは、前に作成した角速度データ及び角速度データに対応する変換された動きデータを使用することを含む、請求項3に記載の方法。
- 前記角加速度データを作成することは、前記作成した角速度データに数値微分を使用することを含む、請求項3に記載の方法。
- 前記予測するステップは、前記作成した角速度の履歴から前記角速度のスライディングウィンドウの平均を決定することを含む、請求項3に記載の方法。
- 前記スライディングウィンドウのサイズは、前記角加速度データによって決定される、請求項6に記載の方法。
- 前記角加速度データは、角速度変化値を作成するために積分される、請求項1に記載の方法。
- 前記頭部搭載リスニング装置は、再生装置に無線接続された複数のイヤホンを含む、請求項1に記載の方法。
- 前記予測するステップ及び提供するステップが、前記頭部搭載リスニング装置に前記音場を提供する装置の1つ以上のプロセッサによって実行される、請求項1に記載の方法。
- 前記受信するステップ及び変換するステップが、更に、前記頭部搭載リスニング装置に前記音場を提供する装置の1つ以上のプロセッサによって実行される、請求項10に記載の方法。
- 前記受信するステップ及び変換するステップは、前記頭部搭載リスニング装置の1つ以上のプロセッサによって実行される、請求項10に記載の方法。
- システムであって、
1つ以上のプロセッサと、
命令を格納する非一時的コンピュータ可読媒体であって、前記命令は、前記1つ以上のプロセッサにより実行されると、前記1つ以上のプロセッサに請求項1~12のいずれか一項に記載の方法を実行させる、非一時的コンピュータ可読記憶媒体と、
を含むシステム。 - 命令を格納する非一時的コンピュータ可読媒体であって、前記命令は、1つ以上のプロセッサにより実行されると、前記1つ以上のプロセッサに請求項1~12のいずれか一項に記載の方法を実行させる、非一時的コンピュータ可読媒体。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN2021081747 | 2021-03-19 | ||
| CNPCT/CN2021/081747 | 2021-03-19 | ||
| US202163177441P | 2021-04-21 | 2021-04-21 | |
| US63/177,441 | 2021-04-21 | ||
| PCT/US2022/020840 WO2022197987A1 (en) | 2021-03-19 | 2022-03-18 | Sensor data prediction |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2024508125A JP2024508125A (ja) | 2024-02-22 |
| JP7585512B2 true JP7585512B2 (ja) | 2024-11-18 |
Family
ID=81328281
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023550201A Active JP7585512B2 (ja) | 2021-03-19 | 2022-03-18 | センサデータ予測 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20240147180A1 (ja) |
| EP (1) | EP4309377A1 (ja) |
| JP (1) | JP7585512B2 (ja) |
| CN (1) | CN116941252A (ja) |
| WO (1) | WO2022197987A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN121176040A (zh) * | 2023-05-29 | 2025-12-19 | 索尼集团公司 | 信息处理装置、信息处理系统、信息处理方法和程序 |
| WO2025235582A1 (en) * | 2024-05-09 | 2025-11-13 | Dolby Laboratories Licensing Corporation | Rotation of sound fields |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015233252A (ja) | 2014-06-10 | 2015-12-24 | 富士通株式会社 | 音声処理装置、音源位置制御方法及び音源位置制御プログラム |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001177889A (ja) * | 1999-12-21 | 2001-06-29 | Casio Comput Co Ltd | 身体装着型音楽再生装置、及び音楽再生システム |
| US20080211768A1 (en) * | 2006-12-07 | 2008-09-04 | Randy Breen | Inertial Sensor Input Device |
| GB2459012A (en) * | 2008-03-20 | 2009-10-14 | Univ Surrey | Predicting the perceived spatial quality of sound processing and reproducing equipment |
| JP5361691B2 (ja) * | 2009-12-11 | 2013-12-04 | 三菱電機株式会社 | 自動二輪車のバンク角推定装置及び方法 |
| US9063330B2 (en) * | 2013-05-30 | 2015-06-23 | Oculus Vr, Llc | Perception based predictive tracking for head mounted displays |
| US9906636B2 (en) * | 2014-02-23 | 2018-02-27 | Hush Technology Inc. | Intelligent earplug system |
| US20160077166A1 (en) * | 2014-09-12 | 2016-03-17 | InvenSense, Incorporated | Systems and methods for orientation prediction |
| US9068843B1 (en) * | 2014-09-26 | 2015-06-30 | Amazon Technologies, Inc. | Inertial sensor fusion orientation correction |
| US10979843B2 (en) * | 2016-04-08 | 2021-04-13 | Qualcomm Incorporated | Spatialized audio output based on predicted position data |
| US10388027B2 (en) * | 2016-06-01 | 2019-08-20 | Kyocera Corporation | Detection method, display apparatus, and detection system |
| KR102246836B1 (ko) * | 2016-08-22 | 2021-04-29 | 매직 립, 인코포레이티드 | 가상, 증강, 및 혼합 현실 시스템들 및 방법들 |
| US11202164B2 (en) * | 2017-09-27 | 2021-12-14 | Apple Inc. | Predictive head-tracked binaural audio rendering |
| US10194259B1 (en) * | 2018-02-28 | 2019-01-29 | Bose Corporation | Directional audio selection |
| CN108957510B (zh) * | 2018-07-25 | 2022-05-24 | 南京航空航天大学 | 基于惯性/零速/gps的行人无缝组合导航定位方法 |
| CN111523076B (zh) * | 2020-03-24 | 2021-04-02 | 中国人民解放军军事科学院评估论证研究中心 | 基于Fal函数计算角加速度的方法、装置及系统 |
-
2022
- 2022-03-18 EP EP22715276.6A patent/EP4309377A1/en active Pending
- 2022-03-18 JP JP2023550201A patent/JP7585512B2/ja active Active
- 2022-03-18 CN CN202280019488.5A patent/CN116941252A/zh active Pending
- 2022-03-18 US US18/280,314 patent/US20240147180A1/en active Pending
- 2022-03-18 WO PCT/US2022/020840 patent/WO2022197987A1/en not_active Ceased
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015233252A (ja) | 2014-06-10 | 2015-12-24 | 富士通株式会社 | 音声処理装置、音源位置制御方法及び音源位置制御プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2022197987A1 (en) | 2022-09-22 |
| JP2024508125A (ja) | 2024-02-22 |
| US20240147180A1 (en) | 2024-05-02 |
| EP4309377A1 (en) | 2024-01-24 |
| CN116941252A (zh) | 2023-10-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6913326B2 (ja) | 適応基準を用いた頭部追跡 | |
| JP7585512B2 (ja) | センサデータ予測 | |
| CN110132271B (zh) | 一种自适应卡尔曼滤波姿态估计算法 | |
| CN105892658B (zh) | 基于头戴显示设备预测头部姿态的方法和头戴显示设备 | |
| US20210051420A1 (en) | Method of operating a hearing device, and hearing device | |
| CN108106614A (zh) | 一种惯性传感器与视觉传感器数据融算法 | |
| JP4427551B2 (ja) | ビデオデータを安定させるための方法及びシステム | |
| CN120343415A (zh) | 图像数据处理方法、图像采集设备及存储介质 | |
| CN120569983A (zh) | 利用动态头部跟踪实现的空间化音频 | |
| KR20170092359A (ko) | 회전 모션센서를 이용한 3축 자세정보 계측 시스템 | |
| KR102466996B1 (ko) | 눈 위치 예측 방법 및 장치 | |
| CN119642804B (zh) | 一种惯性测量单元的姿态角减抖方法、装置及遥控器 | |
| CN114322991B (zh) | 设备的姿态检测方法、装置、电子设备及计算机存储介质 | |
| EP4402558B1 (en) | Efficient orientation tracking with future orientation prediction | |
| JP7622205B2 (ja) | オブジェクトの向きを追跡するための方法、トラッカシステム、およびヘッドまたはヘルメットマウントディスプレイ | |
| CN110827226B (zh) | 骨骼点的平滑方法、装置和电子设备 | |
| WO2014179449A1 (en) | Mapped variable smoothing evolution method and device | |
| US11182930B2 (en) | Head tracking with adaptive reference | |
| JP2024044163A5 (ja) | 撮像装置及びその制御方法 | |
| JP2017532642A (ja) | 摂動因子存在下で入力の値を推定する方法及び装置 | |
| KR20230048105A (ko) | 머리 제스처의 인식을 위한 장치 및 방법 | |
| US20250039628A1 (en) | Audio processing | |
| CN121560179B (zh) | 一种基于自适应滤波与深度学习的高精度手柄交互方法 | |
| KR20210022354A (ko) | 가상 현실 영상 제공 방법 | |
| CN120063286A (zh) | 预测头戴显示设备定位的方法、设备、介质及程序产品 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230821 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20240918 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20241008 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20241106 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7585512 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |