JP7585560B2 - 基板処理システム及びエッジリングの取り付け方法 - Google Patents
基板処理システム及びエッジリングの取り付け方法 Download PDFInfo
- Publication number
- JP7585560B2 JP7585560B2 JP2024554229A JP2024554229A JP7585560B2 JP 7585560 B2 JP7585560 B2 JP 7585560B2 JP 2024554229 A JP2024554229 A JP 2024554229A JP 2024554229 A JP2024554229 A JP 2024554229A JP 7585560 B2 JP7585560 B2 JP 7585560B2
- Authority
- JP
- Japan
- Prior art keywords
- edge ring
- substrate
- plasma
- electrostatic chuck
- ring
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Classifications
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/70—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping
- H10P72/76—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping using mechanical means, e.g. clamps or pinches
- H10P72/7604—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping using mechanical means, e.g. clamps or pinches the wafers being placed on a susceptor, stage or support
- H10P72/7611—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping using mechanical means, e.g. clamps or pinches the wafers being placed on a susceptor, stage or support characterised by edge profile or support profile
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/32—Gas-filled discharge tubes
- H01J37/32431—Constructional details of the reactor
- H01J37/32697—Electrostatic control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G49/00—Conveying systems characterised by their application for specified purposes not otherwise provided for
- B65G49/05—Conveying systems characterised by their application for specified purposes not otherwise provided for for fragile or damageable materials or articles
- B65G49/07—Conveying systems characterised by their application for specified purposes not otherwise provided for for fragile or damageable materials or articles for semiconductor wafers Not used, see H10P72/00
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/32—Gas-filled discharge tubes
- H01J37/32431—Constructional details of the reactor
- H01J37/32623—Mechanical discharge control means
- H01J37/32642—Focus rings
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/32—Gas-filled discharge tubes
- H01J37/32431—Constructional details of the reactor
- H01J37/32715—Workpiece holder
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/32—Gas-filled discharge tubes
- H01J37/32431—Constructional details of the reactor
- H01J37/32733—Means for moving the material to be treated
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/32—Gas-filled discharge tubes
- H01J37/32431—Constructional details of the reactor
- H01J37/32798—Further details of plasma apparatus not provided for in groups H01J37/3244 - H01J37/32788; special provisions for cleaning or maintenance of the apparatus
- H01J37/32807—Construction (includes replacing parts of the apparatus)
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/32—Gas-filled discharge tubes
- H01J37/32431—Constructional details of the reactor
- H01J37/32798—Further details of plasma apparatus not provided for in groups H01J37/3244 - H01J37/32788; special provisions for cleaning or maintenance of the apparatus
- H01J37/32853—Hygiene
- H01J37/32862—In situ cleaning of vessels and/or internal parts
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/32—Gas-filled discharge tubes
- H01J37/32431—Constructional details of the reactor
- H01J37/32798—Further details of plasma apparatus not provided for in groups H01J37/3244 - H01J37/32788; special provisions for cleaning or maintenance of the apparatus
- H01J37/32889—Connection or combination with other apparatus
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P50/00—Etching of wafers, substrates or parts of devices
- H10P50/20—Dry etching; Plasma etching; Reactive-ion etching
- H10P50/24—Dry etching; Plasma etching; Reactive-ion etching of semiconductor materials
- H10P50/242—Dry etching; Plasma etching; Reactive-ion etching of semiconductor materials of Group IV materials
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/04—Apparatus for manufacture or treatment
- H10P72/0402—Apparatus for fluid treatment
- H10P72/0418—Apparatus for fluid treatment for etching
- H10P72/0421—Apparatus for fluid treatment for etching for drying etching
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/04—Apparatus for manufacture or treatment
- H10P72/0451—Apparatus for manufacturing or treating in a plurality of work-stations
- H10P72/0452—Apparatus for manufacturing or treating in a plurality of work-stations characterised by the layout of the process chambers
- H10P72/0454—Apparatus for manufacturing or treating in a plurality of work-stations characterised by the layout of the process chambers surrounding a central transfer chamber
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/30—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/30—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations
- H10P72/33—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations into and out of processing chamber
- H10P72/3302—Mechanical parts of transfer devices
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/70—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/70—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping
- H10P72/72—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping using electrostatic chucks
- H10P72/722—Details of electrostatic chucks
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/70—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping
- H10P72/76—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping using mechanical means, e.g. clamps or pinches
- H10P72/7604—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping using mechanical means, e.g. clamps or pinches the wafers being placed on a susceptor, stage or support
- H10P72/7612—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping using mechanical means, e.g. clamps or pinches the wafers being placed on a susceptor, stage or support characterised by lifting arrangements, e.g. lift pins
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J2237/00—Discharge tubes exposing object to beam, e.g. for analysis treatment, etching, imaging
- H01J2237/32—Processing objects by plasma generation
- H01J2237/33—Processing objects by plasma generation characterised by the type of processing
- H01J2237/334—Etching
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Plasma & Fusion (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Health & Medical Sciences (AREA)
- Epidemiology (AREA)
- Public Health (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Drying Of Semiconductors (AREA)
- Plasma Technology (AREA)
- Robotics (AREA)
Description
上述のエッジリングを用いる場合、当該エッジリングの温度が基板周縁部のプラズマ処理結果に影響を与えるため、当該エッジリングの温度調整も重要である。そのため、エッジリングの温度も基板支持台を介して調整される。
図1は、本実施形態にかかる基板処理システムとしてのプラズマ処理システムの構成の概略を示す平面図である。
図1のプラズマ処理システム1では、基板としてのウェハWを処理し、具体的には、ウェハWに対して、プラズマを用いたエッチング処理等の基板処理すなわちプラズマ処理を行う。
このトランスファモジュール50は、平面視多角形状(図示の例では平面視四角形状)の筐体を有する減圧搬送室51を含み、減圧搬送室51がロードロックモジュール20、21に接続されている。
また、トランスファモジュール50は、収納モジュール61内のエッジリングEを一の処理モジュール60に搬送すると共に、処理モジュール60内のエッジリングEを収納モジュール61に搬出する場合がある。
また、収納モジュール61は、ゲートバルブ63を介してトランスファモジュール50に接続されている。
次に、以上のように構成されたプラズマ処理システム1を用いたウェハ処理の一例について説明する。
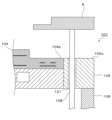
続いて、処理モジュール60について、図2~図4を用いて説明する。図2は、処理モジュール60の構成の概略を示す縦断面図である。図3は、図2の部分拡大図である。図4は、後述のウェハ支持台101の周方向にかかる図3とは異なる部分の拡大断面図である。
直流電源131aは、スイッチ132aを介して電極111aに接続され、当該電極111aに、エッジリングEを静電吸着するための正の電圧又は負の電圧を選択的に印加する。
直流電源131bは、スイッチ132bを介して電極111bに接続され、当該電極111bに、エッジリングEを静電吸着するための正の電圧又は負の電圧を選択的に印加する。
直流電源131cは、スイッチ132cを介して電極110に接続され、当該電極110に、ウェハWを静電吸着するための電圧を印加する。
バイアス部140は、例えば、バイアス電源141a、整合回路142a、フィルタ143aを含む。
バイアス電源141bは、整合回路142b、フィルタ143bを介して、電極112に接続され、チャンバ100内で生成されたプラズマからウェハWにイオン等を引き込むために、バイアス用のパルス状の直流電圧を電極112に印加する。バイアス電源141bは、バイアス用のパルス状の直流電圧を電極112に印加するものに限られず、例えば、バイアス用のRF電力を電極112に供給するものであってもよい。なお、バイアス電源、整合回路、フィルタを電極112、113間で共通としてもよい。
また、本実施形態において、エッジリングEを吸着保持するための電極111は、双極型であるものとしたが、単極型であってもよい。
さらに、本実施形態において、ウェハ用のバイアス及びエッジリングE用のバイアスが、電極112、113に供給されるが、すなわち、静電チャック104に供給されるが、下部電極103に供給されてもよい。この場合、ウェハ用のバイアスとエッジリングE用のバイアスは同じとなり、また、電極112、113は省略される。
なお、エッジリングEは、その上部に段差が形成されており、外周部の上面が内周部の上面より高く形成されている。エッジリングEの内周部は、静電チャック104の中央部から張り出したウェハWの周縁部の下側にもぐり込むように形成されている。つまり、エッジリングEは、その内径が、ウェハWの外径よりも小さく形成されている。
また、配管153には、ガス供給部150による伝熱ガスの供給の実行・停止を切り換える切換弁155が設けられていてもよい。同様に、配管181には、排気システム180による上記周縁部の上面104bの周囲の排気について実行・停止を切り換える切換弁182が設けられていてもよい。
なお、リフタ107は、互いに間隔を空けて3本以上設けられ、上下方向に延びるように設けられている。
なお、リフタ108は、静電チャック104の周方向に沿って、互いに間隔を空けて3本以上設けられ、上下方向に延びるように設けられている。
また、リフタ108とアクチュエータ118は、リング載置面である静電チャック104の周縁部の上面104bに対してエッジリングEを昇降させる昇降機構を構成する。
次に、処理モジュール60を用いて行われるウェハ処理の一例について説明する。なお、処理モジュール60では、製品基板としての製品ウェハWに対して、エッチング処理等のプラズマ処理を行う。
なお、プラズマ処理中、静電チャック104に吸着保持された製品ウェハWに向けて、伝熱ガスが吐出される。
続いて、プラズマ処理システム1により実行される、処理モジュール60内へのエッジリングEの取り付けシーケンスの一例について説明する。図5は、エッジリングEの取り付けシーケンスの例1を示すフローチャートである。なお、以下の各工程は、記憶部92に格納されたプログラムに基づく制御装置80(具体的には処理部91)の制御及び演算にしたがって、プラズマ処理システム1が実行する。
具体的には、全てのリフタ108の上昇が行われ、エッジリングEが、搬送アーム71からリフタ108へ受け渡される。その後、搬送アーム71のチャンバ100からの抜き出しが行われると共に、ゲートバルブ62が閉じられる。
具体的には、リフタ108の下降が、リフタ108の上端が挿通孔121に収まるまで行われる。これにより、エッジリングEが、リング載置面である静電チャック104の周縁部の上面104bに載置される。
具体的には、チャンバ100内にウェハWが存在しない状態で、静電チャック104の電極111に電圧が印加される。
より具体的には、チャンバ100内にウェハWが存在せず、リング載置面である静電チャック104の周縁部の上面104bにエッジリングEが載置されている状態で、直流電源121a、121bがON状態とされる。これにより、静電チャック104の電極111aと電極111bに、例えば、負極性の直流電圧が印加される。
より具体的には、切換弁182が開状態とされ、排気システム180により、静電チャック104の周縁部の上面104b及び支持体105の上面105aの周囲が、ガス吐出孔104cを介して排気されてもよい。これにより、エッジリングEが、リング載置面である静電チャック104の周縁部の上面104bに真空吸着される。
ダミーウェハWは、例えば、フープ31に収容されている。ダミーウェハWのウェハ載置面への載置は、前述した処理モジュール60のウェハ処理におけるウェハWのウェハ載置面への載置と同様に行われる。また、載置されたダミーウェハWは、静電チャック104に静電吸着される。
なお、プラズマ生成用の高周波電力HFは、上部電極102に供給されてもよい。
また、第3の工程において、バイアス用の負極性のパルス状の直流電圧は、間欠的に電極113へ印加されてもよく、具体的には、間欠的且つ周期的に所定のデューティ比で電極113へ印加されてもよい。ただし、第3の工程において、バイアス用の負極性のパルス状の直流電圧は、連続的に電極113へ印加されてもよい。
また、吸着安定処理中、ダミーウェハWが静電チャック104に静電吸着されていてもよい。
さらに、吸着安定処理中、リング載置面である静電チャック104の周縁部の上面104bとエッジリングEとの間の隙間に、ガス供給部150から供給された伝熱ガスが、ガス吐出孔104cを介して供給されてもよい。
この工程は、リフタ107及び搬送ロボット70を用いて行われる。
なお、プラズマ生成用の高周波電力HFは、上部電極102に供給されてもよい。
なお、ステップS3dは省略してもよい。
取り付けシーケンスの例1では、チャンバ100内に搬送ロボット70により搬送されリフタ108を含む昇降機構に受け渡されたエッジリングEを上記昇降機構により下降させてリング載置面に載置する工程と、載置されたエッジリングEをリング載置面に静電吸着する工程と、が行われる。また、取り付けシーケンスの例1では、製品ウェハWをプラズマ処理する前に、チャンバ100内にプラズマを生成し、静電チャック104へのエッジリングEの静電吸着をプラズマにより安定化する工程が行われる。そのため、静電チャック104へのエッジリングEの静電吸着力を向上させることができる。すなわち、エッジリングEをウェハ支持台101へ適切に静電吸着することができる。
また、取り付けシーケンスの例1では、上記安定化する工程は、ウェハ支持台101に、バイアス用のパルス状の直流電圧を印加する工程を含む。また、上記印加する工程は、第1のバイアス電圧V1を印加する第1の工程と、第1の工程後に、第1のバイアス電圧V1よりも高い第2のバイアス電圧を印加する2の工程と、を含む。上記印加する工程の初期は、静電チャック104へのエッジリングEの静電吸着力が弱いこと等から、高いバイアス電圧を印加すると、静電チャック104のリング載置面とエッジリングEとの間で放電が生じ、静電チャック104またはエッジリングEの少なくともいずれか一方が破損するおそれがある。この点を鑑み、取り付けシーケンスの例1では、ウェハ支持台101に印加されるバイアス用のパルス状の直流電圧のバイアス電圧が、先に行われる第1の工程より第2の工程において高く、すなわち、先に行われる第1の工程において第2の工程より低くされているため、上記放電が生じるのを抑制することができる。また、取り付けシーケンスの例1によれば、本例と異なりバイアス用のパルス状の直流電圧を印加する工程においてバイアス電圧を第1の工程のように低い値で最後まで維持する場合に比べて、静電チャック104へのエッジリングEの静電吸着力を効率的に向上させることができる。さらに、取り付けシーケンスの例1では、本例と異なりバイアス用のパルス状の直流電圧を印加する工程においてバイアス電圧を第1の工程のように小さい値で最後まで維持する場合に比べて、プラズマからエッジリングEへの入熱量が多い。そのため、上記放電等の原因の一つなるエッジリングEに付着していた水分を、効率的にエッジリングEから除去することができる。
図6は、エッジリングEの取り付けシーケンスの例2を示すフローチャートである。
取り付けシーケンスの例2では、取り付けシーケンスの例1のステップS1~ステップS3が全て行われるのに加えて、ステップS3bの吸着安定処理の後、且つ、製品ウェハWをプラズマ処理する前に、チャンバ100内がシーズニングされる(ステップS11)。
そして、ウェハ載置面にダミーウェハWが静電吸着されリング載置面にエッジリングEが静電吸着された状態で、ガス供給部160から上部電極102を介して処理空間100sにシーズニング用のガスが供給される。また、RF電力供給部170からプラズマ生成用の高周波電力HFが、一例として、下部電極103に供給され、これにより、上記ガスが励起され、プラズマが生成される。生成されたプラズマにより、チャンバ100の内壁に所定量の膜が形成される等、チャンバ100内がシーズニングされ、安定した状態となる。
なお、プラズマ生成用の高周波電力HFは、上部電極102に供給されてもよい。
その後、ステップS3cと同様に、ダミーウェハWが、ウェハ載置面から取り外され、チャンバ100から搬出される。
ただし、チャンバ100内のシーズニングが、ウェハ載置面にダミーウェハWが載置されていない状態で行われてもよい。
以上の例では、チャンバ100内で生成されたプラズマからエッジリングEにイオン等を引き込むために、バイアス部140から、バイアス用のパルス状の直流電圧が印加されていたが、代わりに、バイアス用のRF電力が供給されてもよい。この場合、バイアス部140のバイアス電源141aは、バイアス用のRF電力を電極113に印加する。
次いで、製品ウェハWをプラズマ処理する前に、チャンバ100内にプラズマが生成され、静電チャック104へのエッジリングEの静電吸着をプラズマにより安定化させる工程(ステップS3A)が行われる。
また、ステップS3Aでは、ステップS3aに続いて、エッジリングEの吸着安定処理が行われる(ステップS3Ab)。本ステップS3Abは、第1の工程(ステップS3Ab1)と、第2の工程(ステップS3Ab2)を含む。
なお、プラズマ生成用の高周波電力HFは、上部電極102に供給されてもよい。
また、吸着安定処理中、ダミーウェハWが静電チャック104に静電吸着されていてもよい。
図8は、エッジリングEの取り付けシーケンスの例4を示すフローチャートである。図9は、後述のステップS21すなわちエッジリングEからの水分除去時における、ウェハ支持台101の周囲の状態を示す図である。
取り付けシーケンスの例4では、図8に示すように、エッジリングEが、チャンバ100内に搬送され、その水分がチャンバ100内で除去された後に、リング載置面に載置される(ステップS21)。すなわち、チャンバ100内に搬送されたエッジリングEが、リング載置面に載置される前に、チャンバ100内でその水分が除去される。
続いて、ステップS1と同様に、エッジリングEが、搬送ロボット70からリフタ108に受け渡される。
具体的には、エッジリングEがリフタ108を含む昇降機構により静電チャック104のリング載置面から支持され離間された状態で、ガス供給部160から上部電極102を介して処理空間100sに水分除去用のガスが供給される。また、RF電力供給部170からプラズマ生成用の高周波電力HFが、一例として、下部電極103に供給され、これにより、上記ガスが励起され、プラズマが生成される。生成されたプラズマにより、エッジリングEに付着していた水分が、直接またはエッジリングEを介して加熱され気化され、除去される。特に、リング載置面に載置された状態では除去されにくいエッジリングEの裏面(すなわちリング載置面側の面)に付着していた水分も除去される。
水分除去時すなわちプラズマ生成時のエッジリングEの高さは、エッジリングの下方にプラズマが形成されれば、搬送ロボット70からリフタ108へのウェハWの受け渡しが完了したときの高さより高くてもよいし、低くてもよい。
なお、上記水分除去用のガスは、酸素ガスであってもよいし、窒素ガスであっても、アルゴンガス等の希ガスであってもよい。
また、プラズマ生成用の高周波電力HFは、上部電極102に供給されてもよい。ステップS21におけるプラズマ生成時の条件(例えばチャンバ100内の圧力やプラズマ生成用の高周波電力HFの大きさ等)は、ステップS3dのクリーニング工程におけるプラズマ生成時の条件と同じであってもよい。これにより、静電チャック104がプラズマにより損傷するのを抑制することができる。
ステップS21では、その後、ステップS1と同様に、エッジリングEが、リフタ108を含む昇降機構により下降され、静電チャック104のリング載置面に載置される。
以上の例では、吸着安定処理は、静電チャック104のウェハ載置面である中央部の上面104aにダミーウェハWが載置された状態で行われていたが、載置されていない状態で行われてもよい。ただし、ダミーウェハWが載置された状態で行われることにより、上記中央部の上面104a等、静電チャック104がプラズマによりダメージを受けるのを抑制することができる。
以下では、図10のウェハ支持台101Aについて、図3等に示したウェハ支持台101との相違点を中心に説明する。
また、リフタ108Aは、第1係合部108Aaと第2係合部108Abとを有する。
また、第2係合部108Abは、リフタ108Aの軸方向に沿って、第1係合部108Aaの基端側に連接されている。また、第2係合部108Abは、第1係合部108Aaに連接する位置に、第1係合部108Aaの外周から外側に向けて突出する突出部108Acを有する。
また、アクチュエータ118は、第1係合部108AaにエッジリングEが係合したリフタ108を昇降させて、エッジリングEを昇降させる。
具体的には、収納モジュール61内のエッジリングEAが、搬送ロボット70の搬送アーム71によって保持される。次いで、上記取り付け対象である処理モジュール60のチャンバ100内に、搬入出口(図示せず)を介して、エッジリングEを保持した搬送アーム71が挿入される。そして、静電チャック104の周縁部の上面104bの上方へ、エッジリングEAが搬送アーム71によって搬送される。このとき、支持体105の上面105aにはカバーリングCAが載置された状態である。
具体的には、全てのリフタ108Aの上昇が行われ、エッジリングEAが、搬送アーム71から、カバーリングCAの貫通孔CA2を通過したリフタ108Aの第1係合部108Aaへ、受け渡される。この際、リフタ108Aの上昇は、第1係合部108Aaの頂部が所定の高さになるまで行われる。ここでの所定の高さは、支持体105Aに載置されたカバーリングCAと第1係合部108Aaに支持されたエッジリングEAとの間を、搬送アーム71を挿抜させたときに、当該搬送アーム71が、エッジリングEA及びカバーリングCA等と干渉しない高さである。
続いて、搬送アーム71のチャンバ100からの抜き出しが行われる。また、リフタ108Aの下降が行われる。これにより、エッジリングEAが静電チャック104の周縁部の上面104bに載置される。
具体的には、収納モジュール61内のエッジリングEAを支持したカバーリングCAが、搬送ロボット70の搬送アーム71によって保持される。次いで、上記取り付け対象である処理モジュール60のチャンバ100内に、搬入出口(図示せず)を介して、上記カバーリングCAを保持した搬送アーム71が挿入される。そして、静電チャック104の周縁部の上面104b及び支持体105Aの上面105Aaの上方へ、エッジリングEAを支持したカバーリングCAが搬送アーム71によって搬送される。
(1)基板処理システムであって、
プラズマ処理装置と、前記プラズマ処理装置に接続された減圧搬送装置と、制御装置と、を備え、
前記プラズマ処理装置は、
減圧可能に構成された処理容器と、
前記処理容器内に設けられ、基板載置面と、エッジリングが基板を囲むように載置されるリング載置面と、前記エッジリングを前記リング載置面に静電吸着する静電チャックと、を含み、バイアス用のパルス状の直流電圧を供給する電源に接続された基板支持台と、
前記エッジリングを昇降させる昇降機構と、
前記処理容器内にプラズマを生成するプラズマ生成部と、を有し、
前記減圧搬送装置は、前記エッジリングを搬送する搬送ロボットを有し、
前記制御装置は、
前記処理容器内に前記搬送ロボットにより搬送され前記昇降機構に受け渡された前記エッジリングを前記昇降機構により下降させて前記リング載置面に載置する工程と、
載置された前記エッジリングを前記リング載置面に静電吸着する工程と、
製品基板をプラズマ処理する前に、前記処理容器内にプラズマを生成し、前記静電チャックへの前記エッジリングの静電吸着を安定化する工程と、を制御し、
前記安定化する工程は、前記基板支持台に前記バイアス用のパルス状の直流電圧を印加する工程を含み、
前記印加する工程は、第1のバイアス電圧を印加する第1の工程と、前記第1の工程後に前記第1のバイアス電圧よりも高い第2のバイアス電圧を印加する第2の工程と、を含む、基板処理システム。
(2)基板処理システムであって、
プラズマ処理装置と、前記プラズマ処理装置に接続された減圧搬送装置と、制御装置と、を備え、
前記プラズマ処理装置は、
減圧可能に構成された処理容器と、
前記処理容器内に設けられ、基板載置面と、エッジリングが基板を囲むように載置されるリング載置面と、前記エッジリングを前記リング載置面に静電吸着する静電チャックと、を含み、バイアス用のRF電力を供給する電源に接続された基板支持台と、
前記エッジリングを昇降させる昇降機構と、
前記処理容器内にプラズマを生成するプラズマ生成部と、を有し、
前記減圧搬送装置は、前記エッジリングを搬送する搬送ロボットを有し、
前記制御装置は、
前記処理容器内に前記搬送ロボットにより搬送され前記昇降機構に受け渡された前記エッジリングを前記昇降機構により下降させて前記リング載置面に載置する工程と、
載置された前記エッジリングを前記リング載置面に静電吸着する工程と、
製品基板をプラズマ処理する前に、前記処理容器内にプラズマを生成し、前記静電チャックへの前記エッジリングの静電吸着を安定化する工程と、を制御し、
前記安定化する工程は、前記基板支持台に前記バイアス用のRF電力を供給する工程を含み、
前記供給する工程は、第1のバイアス電力を供給する第1の工程と、前記第1の工程後に前記第1のバイアス電力よりも大きい第2のバイアス電力を供給する第2の工程と、を含む、基板処理システム。
(3)前記制御装置は、前記安定化後、前記製品基板に対する前記プラズマ処理前に、前記処理容器内をシーズニングする工程をさらに制御する、前記(1)に記載の基板処理システム。
(4)前記安定化は、前記静電チャックの前記基板載置面に、前記製品基板とは異なるダミー基板が載置された状態で行われる、前記(1)または(3)に記載の基板処理システム。
(5)前記安定化する工程は、前記静電チャックの前記基板載置面に基板が載置されていない状態で、前記処理容器内にプラズマを生成し、前記静電チャックをクリーニングする工程を含む、前記(1)、(3)または(4)のいずれか1に記載の基板処理システム。
(6)前記印加する工程は、前記第2の工程後に、前記第2のバイアス電圧よりも高い第3のバイアス電圧を印加する第3の工程をさらに含む、前記(1)、(3)~(5)のいずれか1に記載の基板処理システム。
(7)前記第3の工程は、前記基板支持台に前記パルス状の直流電圧を前記第3のバイアス電圧で間欠的に印加する、前記(6)に記載の基板処理システム。
(8)前記印加する工程は、パルス状の負の直流電圧を印加し、
前記第2のバイアス電圧の絶対値は、前記第1のバイアス電圧の絶対値より大きい、前記(1)、(3)~(7)のいずれか1に記載の基板処理システム。
(9)前記制御装置は、前記載置する工程前に、前記エッジリングを前記昇降機構によって前記リング載置面から離間させた状態で、前記処理容器内にプラズマを生成し、前記エッジリングから水分を除去する工程をさらに実行する、前記(1)、(3)~(8)のいずれか1に記載の基板処理システム。
(10)前記制御装置は、前記安定化後、前記製品基板に対する前記プラズマ処理前に、前記処理容器内をシーズニングする工程をさらに制御する、前記(2)に記載の基板処理システム。
(11)前記安定化は、前記静電チャックの前記基板載置面に、前記製品基板とは異なるダミー基板が載置された状態で行われる、前記(2)または(10)に記載の基板処理システム。
(12)前記安定化する工程は、前記静電チャックの前記基板載置面に基板が載置されていない状態で、前記処理容器内にプラズマを生成し、前記静電チャックをクリーニングする工程を含む、前記(2)、(10)または(11)に記載の基板処理システム。
(13)前記供給する工程は、前記第2の工程後に、前記第2のバイアス電力よりも大きい第3のバイアス電力を供給する第3の工程をさらに含む、前記(2)、(10)~(12)のいずれか1に記載の基板処理システム。
(14)前記第3の工程は、前記基板支持台に前記RF電力を前記第3のバイアス電力で間欠的に供給する、前記(13)に記載の基板処理システム。
(15)前記制御装置は、前記載置する工程前に、前記エッジリングを前記昇降機構によって前記リング載置面から離間させた状態で、前記処理容器内にプラズマを生成し、前記エッジリングから水分を除去する工程をさらに実行する、前記(2)、(10)~(14)のいずれか1に記載の基板処理システム。
(16)プラズマ処理装置内の処理容器内に設けられた、基板支持台の静電チャックのリング載置面に、エッジリングを載置する工程と、
載置された前記エッジリングを前記リング載置面に静電吸着する工程と、
前記静電チャックの基板載置面に載置される製品基板をプラズマ処理する前に、前記処理容器内にプラズマを生成し、前記静電チャックへの前記エッジリングの静電吸着をプラズマにより安定化する工程と、を含み、
前記安定化する工程は、前記基板支持台に、バイアス用のパルス状の直流電圧を印加し、または、バイアス用のRF電力を供給する工程を含み、
前記印加または供給する工程は、第1のバイアス電圧を印加し、または、第1のバイアス電力を供給する第1の工程と、前記第1の工程後に、前記第1のバイアス電圧よりも高い第2のバイアス電圧を印加し、または、前記第1のバイアス電力よりも大きい第2のバイアス電力を供給する第2の工程と、を含む、エッジリングの取り付け方法。
50 トランスファモジュール
70 搬送ロボット
80 制御装置
100 チャンバ
101、101A ウェハ支持台
102 上部電極
104 静電チャック
104a 中央部の上面
104b 周縁部の上面
108、108A リフタ
140 バイアス部
170 RF電力供給部
E、EA エッジリング
W ウェハ
Claims (16)
- 基板処理システムであって、
プラズマ処理装置と、前記プラズマ処理装置に接続された減圧搬送装置と、制御装置と、を備え、
前記プラズマ処理装置は、
減圧可能に構成された処理容器と、
前記処理容器内に設けられ、基板載置面と、エッジリングが基板を囲むように載置されるリング載置面と、前記エッジリングを前記リング載置面に静電吸着する静電チャックと、を含み、バイアス用のパルス状の直流電圧を供給する電源に接続された基板支持台と、
前記エッジリングを昇降させる昇降機構と、
前記処理容器内にプラズマを生成するプラズマ生成部と、を有し、
前記減圧搬送装置は、前記エッジリングを搬送する搬送ロボットを有し、
前記制御装置は、
前記処理容器内に前記搬送ロボットにより搬送され前記昇降機構に受け渡された前記エッジリングを前記昇降機構により下降させて前記リング載置面に載置する工程と、
載置された前記エッジリングを前記リング載置面に静電吸着する工程と、
製品基板をプラズマ処理する前に、前記処理容器内にプラズマを生成し、前記静電チャックへの前記エッジリングの静電吸着を安定化する工程と、を制御し、
前記安定化する工程は、前記基板支持台に前記バイアス用のパルス状の直流電圧を印加する工程を含み、
前記印加する工程は、第1のバイアス電圧を印加する第1の工程と、前記第1の工程後に前記第1のバイアス電圧よりも高い第2のバイアス電圧を印加する第2の工程と、を含む、基板処理システム。 - 基板処理システムであって、
プラズマ処理装置と、前記プラズマ処理装置に接続された減圧搬送装置と、制御装置と、を備え、
前記プラズマ処理装置は、
減圧可能に構成された処理容器と、
前記処理容器内に設けられ、基板載置面と、エッジリングが基板を囲むように載置されるリング載置面と、前記エッジリングを前記リング載置面に静電吸着する静電チャックと、を含み、バイアス用のRF電力を供給する電源に接続された基板支持台と、
前記エッジリングを昇降させる昇降機構と、
前記処理容器内にプラズマを生成するプラズマ生成部と、を有し、
前記減圧搬送装置は、前記エッジリングを搬送する搬送ロボットを有し、
前記制御装置は、
前記処理容器内に前記搬送ロボットにより搬送され前記昇降機構に受け渡された前記エッジリングを前記昇降機構により下降させて前記リング載置面に載置する工程と、
載置された前記エッジリングを前記リング載置面に静電吸着する工程と、
製品基板をプラズマ処理する前に、前記処理容器内にプラズマを生成し、前記静電チャックへの前記エッジリングの静電吸着を安定化する工程と、を制御し、
前記安定化する工程は、前記基板支持台に前記バイアス用のRF電力を供給する工程を含み、
前記供給する工程は、第1のバイアス電力を供給する第1の工程と、前記第1の工程後に前記第1のバイアス電力よりも大きい第2のバイアス電力を供給する第2の工程と、を含む、基板処理システム。 - 前記制御装置は、前記安定化後、前記製品基板に対する前記プラズマ処理前に、前記処理容器内をシーズニングする工程をさらに制御する、請求項1に記載の基板処理システム。
- 前記安定化は、前記静電チャックの前記基板載置面に、前記製品基板とは異なるダミー基板が載置された状態で行われる、請求項1に記載の基板処理システム。
- 前記安定化する工程は、前記静電チャックの前記基板載置面に基板が載置されていない状態で、前記処理容器内にプラズマを生成し、前記静電チャックをクリーニングする工程を含む、請求項1に記載の基板処理システム。
- 前記印加する工程は、前記第2の工程後に、前記第2のバイアス電圧よりも高い第3のバイアス電圧を印加する第3の工程をさらに含む、請求項1に記載の基板処理システム。
- 前記第3の工程は、前記基板支持台に前記パルス状の直流電圧を前記第3のバイアス電圧で間欠的に印加する、請求項6に記載の基板処理システム。
- 前記印加する工程は、パルス状の負の直流電圧を印加し、
前記第2のバイアス電圧の絶対値は、前記第1のバイアス電圧の絶対値より大きい、請求項1に記載の基板処理システム。 - 前記制御装置は、前記載置する工程前に、前記エッジリングを前記昇降機構によって前記リング載置面から離間させた状態で、前記処理容器内にプラズマを生成し、前記エッジリングから水分を除去する工程をさらに実行する、請求項1に記載の基板処理システム。
- 前記制御装置は、前記安定化後、前記製品基板に対する前記プラズマ処理前に、前記処理容器内をシーズニングする工程をさらに制御する、請求項2に記載の基板処理システム。
- 前記安定化は、前記静電チャックの前記基板載置面に、前記製品基板とは異なるダミー基板が載置された状態で行われる、請求項2に記載の基板処理システム。
- 前記安定化する工程は、前記静電チャックの前記基板載置面に基板が載置されていない状態で、前記処理容器内にプラズマを生成し、前記静電チャックをクリーニングする工程を含む、請求項2に記載の基板処理システム。
- 前記供給する工程は、前記第2の工程後に、前記第2のバイアス電力よりも大きい第3のバイアス電力を供給する第3の工程をさらに含む、請求項2に記載の基板処理システム。
- 前記第3の工程は、前記基板支持台に前記RF電力を前記第3のバイアス電力で間欠的に供給する、請求項13に記載の基板処理システム。
- 前記制御装置は、前記載置する工程前に、前記エッジリングを前記昇降機構によって前記リング載置面から離間させた状態で、前記処理容器内にプラズマを生成し、前記エッジリングから水分を除去する工程をさらに実行する、請求項2に記載の基板処理システム。
- プラズマ処理装置内の処理容器内に設けられた、基板支持台の静電チャックのリング載置面に、エッジリングを載置する工程と、
載置された前記エッジリングを前記リング載置面に静電吸着する工程と、
前記静電チャックの基板載置面に載置される製品基板をプラズマ処理する前に、前記処理容器内にプラズマを生成し、前記静電チャックへの前記エッジリングの静電吸着をプラズマにより安定化する工程と、を含み、
前記安定化する工程は、前記基板支持台に、バイアス用のパルス状の直流電圧を印加し、または、バイアス用のRF電力を供給する工程を含み、
前記印加または供給する工程は、第1のバイアス電圧を印加し、または、第1のバイアス電力を供給する第1の工程と、前記第1の工程後に、前記第1のバイアス電圧よりも高い第2のバイアス電圧を印加し、または、前記第1のバイアス電力よりも大きい第2のバイアス電力を供給する第2の工程と、を含む、エッジリングの取り付け方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022162521 | 2022-10-07 | ||
| JP2022162521 | 2022-10-07 | ||
| PCT/JP2023/030543 WO2024075423A1 (ja) | 2022-10-07 | 2023-08-24 | 基板処理システム及びエッジリングの取り付け方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2024075423A1 JPWO2024075423A1 (ja) | 2024-04-11 |
| JP7585560B2 true JP7585560B2 (ja) | 2024-11-18 |
Family
ID=90607972
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2024554229A Active JP7585560B2 (ja) | 2022-10-07 | 2023-08-24 | 基板処理システム及びエッジリングの取り付け方法 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US12308221B2 (ja) |
| JP (1) | JP7585560B2 (ja) |
| KR (1) | KR102760072B1 (ja) |
| CN (1) | CN119013770B (ja) |
| TW (1) | TW202431332A (ja) |
| WO (1) | WO2024075423A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2023042804A1 (ja) * | 2021-09-14 | 2023-03-23 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001057363A (ja) | 1999-08-19 | 2001-02-27 | Hitachi Ltd | プラズマ処理装置及びプラズマ処理方法 |
| JP2011009351A (ja) | 2009-06-24 | 2011-01-13 | Hitachi High-Technologies Corp | プラズマ処理装置およびプラズマ処理方法 |
| JP2018010992A (ja) | 2016-07-14 | 2018-01-18 | 東京エレクトロン株式会社 | フォーカスリング交換方法 |
| JP2021141308A (ja) | 2020-03-02 | 2021-09-16 | 東京エレクトロン株式会社 | クリーニング方法およびプラズマ処理装置 |
| JP2022111771A (ja) | 2021-01-20 | 2022-08-01 | 東京エレクトロン株式会社 | プラズマ処理システム及びプラズマ処理方法 |
| JP2022148699A (ja) | 2021-03-24 | 2022-10-06 | 東京エレクトロン株式会社 | プラズマ処理システム及び環状部材の取り付け方法 |
Family Cites Families (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105097485B (zh) * | 2014-05-05 | 2017-09-01 | 北京北方微电子基地设备工艺研究中心有限责任公司 | 腔室环境调控方法 |
| US20180061696A1 (en) * | 2016-08-23 | 2018-03-01 | Applied Materials, Inc. | Edge ring or process kit for semiconductor process module |
| EP3633029A4 (en) * | 2017-05-26 | 2021-06-09 | Green Cross Lab Cell Corporation | METHOD OF DEVELOPING A NATURAL KILLER CELL USING A T-CELL |
| JP7115942B2 (ja) * | 2018-09-06 | 2022-08-09 | 東京エレクトロン株式会社 | 載置台、基板処理装置、エッジリング及びエッジリングの搬送方法 |
| JP7178918B2 (ja) * | 2019-01-30 | 2022-11-28 | 東京エレクトロン株式会社 | エッチング方法、プラズマ処理装置、及び処理システム |
| JP7220603B2 (ja) * | 2019-03-20 | 2023-02-10 | 東京エレクトロン株式会社 | 膜をエッチングする方法及びプラズマ処理装置 |
| JP7474651B2 (ja) * | 2019-09-09 | 2024-04-25 | 東京エレクトロン株式会社 | プラズマ処理装置 |
| JP7412124B2 (ja) * | 2019-10-18 | 2024-01-12 | 東京エレクトロン株式会社 | 基板処理システム及びエッジリングを交換する方法 |
| JP7563843B2 (ja) * | 2019-11-26 | 2024-10-08 | 東京エレクトロン株式会社 | 載置台及び基板処理装置 |
| US11355350B2 (en) * | 2019-12-20 | 2022-06-07 | Tokyo Electron Limited | Etching method, substrate processing apparatus, and substrate processing system |
| JP7412257B2 (ja) * | 2019-12-20 | 2024-01-12 | 東京エレクトロン株式会社 | エッチング方法、基板処理装置、及び基板処理システム |
| JP2021106212A (ja) * | 2019-12-26 | 2021-07-26 | 東京エレクトロン株式会社 | エッチング方法、基板処理装置、及び基板処理システム |
| JP7390199B2 (ja) * | 2020-01-29 | 2023-12-01 | 東京エレクトロン株式会社 | エッチング方法、基板処理装置、及び基板処理システム |
| US12112954B2 (en) * | 2020-01-29 | 2024-10-08 | Tokyo Electron Limited | Etching method, substrate processing apparatus, and substrate processing system |
| JP7546364B2 (ja) * | 2020-02-19 | 2024-09-06 | 東京エレクトロン株式会社 | 基板処理方法、ガス流評価用基板及び基板処理装置 |
| US11742184B2 (en) * | 2020-02-28 | 2023-08-29 | Tokyo Electron Limited | Plasma processing apparatus and plasma processing method |
| JP7390219B2 (ja) * | 2020-03-11 | 2023-12-01 | 東京エレクトロン株式会社 | エッジリングの保持方法、プラズマ処理装置、及び基板処理システム |
| JP7344821B2 (ja) * | 2020-03-17 | 2023-09-14 | 東京エレクトロン株式会社 | プラズマ処理装置 |
| US11551916B2 (en) * | 2020-03-20 | 2023-01-10 | Applied Materials, Inc. | Sheath and temperature control of a process kit in a substrate processing chamber |
| JP7454976B2 (ja) * | 2020-03-24 | 2024-03-25 | 東京エレクトロン株式会社 | 基板支持台、プラズマ処理システム及びエッジリングの交換方法 |
| JP7446145B2 (ja) * | 2020-04-07 | 2024-03-08 | 東京エレクトロン株式会社 | 基板処理装置 |
| JP7441711B2 (ja) * | 2020-04-13 | 2024-03-01 | 東京エレクトロン株式会社 | 基板支持台、プラズマ処理システム及びエッジリングの載置方法 |
| TWI893134B (zh) * | 2020-06-19 | 2025-08-11 | 日商東京威力科創股份有限公司 | 蝕刻方法、基板處理裝置及基板處理系統 |
| JP7409976B2 (ja) * | 2020-06-22 | 2024-01-09 | 東京エレクトロン株式会社 | プラズマ処理システム、プラズマ処理装置及びエッジリングの交換方法 |
| JP7394711B2 (ja) * | 2020-06-23 | 2023-12-08 | 東京エレクトロン株式会社 | 測定器及びシースの厚さを求める方法 |
| TWI905293B (zh) * | 2020-10-19 | 2025-11-21 | 日商東京威力科創股份有限公司 | 載置台及基板處理裝置 |
| JP7769538B2 (ja) * | 2021-12-07 | 2025-11-13 | 東京エレクトロン株式会社 | 基板支持台及びリングの交換方法 |
-
2023
- 2023-08-24 WO PCT/JP2023/030543 patent/WO2024075423A1/ja not_active Ceased
- 2023-08-24 JP JP2024554229A patent/JP7585560B2/ja active Active
- 2023-08-24 KR KR1020247032749A patent/KR102760072B1/ko active Active
- 2023-08-24 CN CN202380031926.4A patent/CN119013770B/zh active Active
- 2023-09-12 TW TW112134579A patent/TW202431332A/zh unknown
-
2024
- 2024-10-24 US US18/925,387 patent/US12308221B2/en active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001057363A (ja) | 1999-08-19 | 2001-02-27 | Hitachi Ltd | プラズマ処理装置及びプラズマ処理方法 |
| JP2011009351A (ja) | 2009-06-24 | 2011-01-13 | Hitachi High-Technologies Corp | プラズマ処理装置およびプラズマ処理方法 |
| JP2018010992A (ja) | 2016-07-14 | 2018-01-18 | 東京エレクトロン株式会社 | フォーカスリング交換方法 |
| JP2021141308A (ja) | 2020-03-02 | 2021-09-16 | 東京エレクトロン株式会社 | クリーニング方法およびプラズマ処理装置 |
| JP2022111771A (ja) | 2021-01-20 | 2022-08-01 | 東京エレクトロン株式会社 | プラズマ処理システム及びプラズマ処理方法 |
| JP2022148699A (ja) | 2021-03-24 | 2022-10-06 | 東京エレクトロン株式会社 | プラズマ処理システム及び環状部材の取り付け方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US12308221B2 (en) | 2025-05-20 |
| US20250079138A1 (en) | 2025-03-06 |
| WO2024075423A1 (ja) | 2024-04-11 |
| KR20240153393A (ko) | 2024-10-22 |
| CN119013770A (zh) | 2024-11-22 |
| JPWO2024075423A1 (ja) | 2024-04-11 |
| CN119013770B (zh) | 2025-11-14 |
| TW202431332A (zh) | 2024-08-01 |
| KR102760072B1 (ko) | 2025-01-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7454976B2 (ja) | 基板支持台、プラズマ処理システム及びエッジリングの交換方法 | |
| JP7763302B2 (ja) | プラズマ処理システム及び環状部材の取り付け方法 | |
| JP7515383B2 (ja) | クリーニング方法およびプラズマ処理装置 | |
| JP2001077088A (ja) | プラズマ処理装置 | |
| US20080242086A1 (en) | Plasma processing method and plasma processing apparatus | |
| JP7769538B2 (ja) | 基板支持台及びリングの交換方法 | |
| US20250336656A1 (en) | Plasma processing system, plasma processing apparatus, and method for replacing edge ring | |
| JP7585560B2 (ja) | 基板処理システム及びエッジリングの取り付け方法 | |
| JP2006196691A (ja) | 半導体製造装置及び半導体装置の製造方法 | |
| WO2024071074A1 (ja) | 基板処理システム | |
| WO2024071073A1 (ja) | 基板処理システム | |
| US12521773B2 (en) | Method of cleaning electrostatic chuck and method of manufacturing semiconductor device while exposing electrostatic chuck to plasma and introducing electron current | |
| US20240347325A1 (en) | Plasma processing apparatus | |
| JP2009141069A (ja) | プラズマ処理装置及び処理方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240911 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20240911 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20241008 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20241106 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7585560 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |