以下、図面を参照しながら、ボクセルデータ評価システムおよびボクセルデータ評価方法の実施形態について詳細に説明する。
本実施形態では、一般的にフェーズドアレイ超音波探傷試験と呼ばれる超音波探傷方法を用いる形態を例示する。その中でも、一定方向に超音波ビームを形成しながら駆動させる超音波素子を電子走査させていくリニア画像法、駆動させる超音波素子を固定または電子走査しながら超音波ビームを形成する角度を扇状に変化させるセクタ画像法、任意の座標領域に網羅的に焦点を設けてビームを集束させるTotal Focusing Method(TFM)、または開口合成法などの超音波を用いた映像化方法を用いることができる。なお、単一プローブを用いて機械的に走査し取得した超音波探傷方法を用いても良い。以下の説明では、代表的なリニア画像法について例示する。
図1の符号1は、本実施形態のボクセルデータ評価システムである。このボクセルデータ評価システム1は、検査の対象となる対象物Qの欠陥(検出対象C)の有無を評価するものである。本実施形態では、所定の超音波探傷方法により取得した超音波データを、人工知能(AI)を備えるコンピュータを用いて自動的に解析し、対象物Qの欠陥の有無を評価する。この欠陥の有無を評価することで、対象物Qの健全性診断などに活用できる。つまり、ボクセルデータ評価システム1は、機械学習により得られた人工知能を用いて対象物Qの解析を行うものである。
なお、本実施形態で処理の対象となっている「超音波データ」という用語は、画像(2次元のデータ、ピクセルデータ)とボクセルデータ(3次元ボリュームデータ)の少なくとも一方の意味を含んでいる。例えば、判定時に処理の対象となる超音波データは、ボクセルデータとなっている。一方、超音波探傷方法により取得されるときの超音波データは、画像となっている。また、超音波データは、静止画または動画のいずれでも良い。なお、ボクセルデータが動画である場合は、3次元のデータに時間の経過を示す4次元目のデータを加えたものである。以下の説明では、理解を助けるために静止画の超音波データを例示している。
ボクセルデータ評価システム1は、超音波探傷器10と超音波探傷装置20と超音波画像処理装置30と超音波データ評価装置100とを備える。
超音波探傷装置20と超音波画像処理装置30と超音波データ評価装置100は、CPU、ROM、RAM、HDDなどのハードウェア資源を有し、CPUが各種プログラムを実行することで、ソフトウェアによる情報処理がハードウェア資源を用いて実現されるコンピュータで構成される。さらに、本実施形態のボクセルデータ評価方法は、各種プログラムをコンピュータに実行させることで実現される。
ボクセルデータ評価システム1の各構成は、必ずしも複数のコンピュータに設ける必要はない。例えば、ボクセルデータ評価システム1の各構成を1つのコンピュータに設けても良い。
図2に示すように、超音波探傷器10は、検査対象となる対象物Qに超音波Uを発し、検出対象Cで反射した反射波を検出する。なお、以下の説明では、反射波をエコー(出現像)と称する場合がある。この超音波探傷器10は、超音波Uを発する複数の超音波素子11Aが配列された探触子11を備える。これら超音波素子11Aは、超音波探傷器10の走査方向に対して直角を成す方向に直線的に並んで配置されている。この超音波探傷器10により取得される超音波画像(2次元の超音波データ)は、対象物Qの断面を示す画像となる。
対象物Qとしては、金属材料で構成された部材を例示する。特に、溶接部W(図3および図4)に生じた検出対象Cをボクセルデータ評価システム1により評価する。なお、金属材料以外の材料、例えば、鉄筋コンクリート、モルタル、繊維強化プラスチックなどの複合材料を対象物Qとしても良い。このような対象物Qの内部または表面に生じた検出対象Cを、ボクセルデータ評価システム1により評価する。
検出対象Cは、ボクセルデータ評価システム1のユーザが任意に定めることができる。検出対象C(欠陥)としては、対象物Qの内部または表面に生じた亀裂、疵、空洞、丸穴、剥離、減肉、介在物などを任意に定めることができる。
本実施形態の超音波探傷器10は、超音波探傷装置20により電圧が印加されて制御される。超音波探傷器10としては、一定方向に超音波Uのビームを形成しながら、駆動対象の超音波素子11Aを電子走査するフェーズドアレイ超音波探傷方式を例示する。なお、本実施形態は、他の方式に適用できる。例えば、Total Focusing Method(TFM)、セクタ画像法、開口合成法などの方式に適用しても良い。さらに、単一プローブを用いて機械的に走査し取得した超音波探傷方法に適用しても良い。
対象物Qの検査時に、超音波探傷器10と対象物Qとの間に、楔と称される音響伝搬媒質2が設けられる。この音響伝搬媒質2は、指向性の高い角度で超音波Uを対象物Qへ入射させるためのものである。
音響伝搬媒質2としては、超音波Uが伝搬可能で音響インピーダンスが把握できている等方材を用いる。なお、対象物Qの表面が平坦である場合には、音響伝搬媒質2を使用しなくても良い。
音響伝搬媒質2として用いられる等方材としては、例えば、アクリル、ポリイミド、ゲル、その他高分子などがある。音響伝搬媒質2としては、超音波素子11Aの前面板(図示略)と音響インピーダンスが近い、または同じ材質を用いることができる。また、対象物Qと音響インピーダンスが近い、または同じ材質を用いることもできる。また、段階的または漸次的に音響インピーダンスを変化させる複合材料を用いても良い。
また、音響伝搬媒質2の内部の多重反射波が探傷結果に影響を与えないように、音響伝搬媒質2の内外にダンピング材を配置しても良い。また、山型の波消し形状を設けても良い。多重反射低減機構を設けても良い。
なお、以下の説明では、超音波探傷器10から対象物Qへ超音波Uを入射させる際の説明において音響伝搬媒質2の表現を省略している場合がある。
超音波探傷器10から対象物Qに至る経路の接触部には、超音波Uを伝搬させるための音響接触媒質(図示略)が用いられる。例えば、音響伝搬媒質2を使用する場合には、超音波探傷器10と音響伝搬媒質2との接触部、および音響伝搬媒質2と対象物Qとの接触部に、音響接触媒質(図示略)が用いられる。音響伝搬媒質2を使用しない場合には、超音波探傷器10と対象物Qとの接触部に、音響接触媒質(図示略)が用いられる。この音響接触媒質には、例えば、水、グリセリン、マシン油、ひまし油、アクリル、ポリスチレン、ゲルなどの超音波Uを伝搬できる媒質が用いられる。
次に、超音波探傷器10を用いて対象物Qの表面を走査する態様を図3から図5を参照して説明する。例えば、対象物Qに直線的に延びる溶接部Wが設けられているものとする(図3および図4)。この溶接部Wに沿って生じた亀裂などの欠陥が、検出対象Cであるとする。
ここで、超音波探傷器10を対象物Qの表面に沿って、かつ溶接部Wが延びる方向に沿って、一方向(直線的)に走査すると、それぞれの位置における対象物Qの断面を示す超音波画像が得られる。例えば、対象物Qのそれぞれの位置(Xn~Xn+4)に対応してそれぞれの超音波画像(Xn~Xn+4)が得られる(図5)。これらの超音波画像(Xn~Xn+4)は、例えば、学習用超音波画像31または判定用超音波画像35である。
溶接部Wの付近に存在する検出対象Cで超音波Uが反射した場合には、超音波画像(Xn~Xn+4)に検出対象Cの出現像が現れるようになる。ここで、溶接部Wに沿って連続的に発生した亀裂のような検出対象Cの場合は、それぞれの超音波画像(Xn~Xn+4)に現れる検出対象Cの出現像の位置に相関がある。
例えば、図5に示すように、検出対象Cが無い位置に対応する超音波画像(Xn)には、検出対象Cの出現像が現れない。一方、検出対象Cが有る位置に対応する超音波画像(Xn+1~Xn+4)には、検出対象Cの出現像が同じ箇所に現れる。
特に、超音波画像(Xn+1)で検出対象Cの出現像が現れ始めたときは、そのサイズが小さいが、次の超音波画像(Xn+2~Xn+3)に掛けて、そのサイズが次第に大きくなる。そして、検出対象Cの終端に差し掛かると、その超音波画像(Xn+4)の検出対象Cの出現像のサイズは、次第に小さくなる。これが検出対象Cに起因する特有のエコー強度(超音波Uの反射強度)の変化である。
図1に示すように、超音波探傷器10で検出された反射波の情報を含む検出信号は、超音波探傷装置20に入力される。そして、この超音波探傷装置20で得られた検出信号が、超音波画像処理装置30で処理される。
超音波画像処理装置30は、超音波Uを用いて対象物Qに含まれる検出対象Cの探傷を行う超音波画像を取得するものである。この超音波画像処理装置30は、超音波Uの反射波に基づいて、超音波素子11Aのスキャン方向に沿った超音波画像を生成することができる。
図6は、代表的なリニアスキャン画像としての超音波画像を例示している。この超音波画像が、本実施形態の学習用データ(学習用画像)としての学習用超音波画像31として用いられる。この学習用超音波画像31では、背景Bが黒色で表示され、超音波Uが対象物Qに入射された入射範囲32がグレー色で表示され、対象物Qの表面33が白色のラインで表示され、検出対象Cが白色で表示される。なお、本実施形態は、超音波画像がRGBなどで表されるカラー画像でも実施可能であるが、説明を明瞭にするため、超音波画像がグレースケール画像であるものとして説明する。図6の例では、1つの検出対象Cが学習用超音波画像31に写っている。
本実施形態では、複数の超音波画像を重ね合わせることで、ボクセルデータを生成することができる。例えば、複数の学習用超音波画像31から生成されたボクセルデータを学習用3次元超音波データ51(図13)として用いることができる。さらに、複数の判定用超音波画像35から生成されたボクセルデータを本実施形態の判定用データとしての判定用3次元超音波データ55(図15)として用いることもできる。
図2に示すように、超音波探傷器10から対象物Qに入射された超音波Uは、遅延時間に従って入射および屈折角度が決定され、対象物Qの内部を伝搬する。この伝搬した超音波Uは、検出対象Cなどで反射または散乱され、再び超音波探傷器10に到達する。また、検出対象C以外にも、対象物Qの角部(図示略)でも超音波Uが、反射または散乱され、超音波探傷器10に到達する。
超音波探傷器10に到達した反射波(散乱波)は、到達時間および超音波素子11Aの情報に基づいて映像化される。このとき、対象物Qに検出対象Cが存在する場合に、検出対象Cのエコー(出現像)が学習用超音波画像31の中に出現する。
本実施形態では、超音波画像処理装置30が、超音波画像を生成する。例えば、学習用超音波画像31(図6)を生成する。超音波画像は、超音波画像処理装置30から超音波データ評価装置100に入力される。
なお、本実施形態の学習用超音波画像31(または学習用3次元超音波データ51)は、超音波探傷装置20により得られる超音波画像を模して、コンピュータグラフィックス(CG)を用いて生成されるCG画像でも良い。また、超音波探傷装置20により得られる超音波画像を人手または自動的に編集して多種多様な学習用超音波画像31を生成しても良い。
さらに、超音波伝搬の数値シミュレーションにより得られる超音波画像を用いても良い。例えば、対象物Qの内部における超音波の伝搬を可視化するシミュレーション技術を用いて超音波画像を生成し、それを学習用超音波画像31として用いても良い。
図1に示すように、超音波データ評価装置100は、学習用超音波画像31に基づき生成された学習用3次元超音波データ51(図13)を用いて機械学習を行い、この機械学習の結果に基づいて、判定モデルを生成する。そして、判定に用いられる判定用3次元超音波データ55(図15)に含まれる検出対象Cの位置を、判定モデルを用いて特定するものである。
つまり、本実施形態のコンピュータを用いた解析には、人工知能の学習に基づく解析技術を用いることができる。例えば、ニューラルネットワークによる機械学習により生成された学習モデル、その他の機械学習により生成された学習モデル、深層学習アルゴリズム、回帰分析などの数学的アルゴリズムを用いることができる。
本実施形態のシステムは、機械学習を行う人工知能を備えるコンピュータを含む。例えば、ニューラルネットワークを備える1台のコンピュータでシステムを構成しても良いし、ニューラルネットワークを備える複数台のコンピュータでシステムを構成しても良い。
ここで、ニューラルネットワークとは、脳機能の特性をコンピュータによるシミュレーションによって表現した数学モデルである。例えば、シナプスの結合によりネットワークを形成した人工ニューロン(ノード)が、学習によってシナプスの結合強度を変化させ、問題解決能力を持つようになるモデルを示す。さらに、ニューラルネットワークは、深層学習(Deep Learning)により問題解決能力を取得する。
なお、学習対象となる各種情報項目に報酬関数が設定されるとともに、報酬関数に基づいて価値が最も高い情報項目が抽出される深層強化学習をニューラルネットワークに用いても良い。
本実施形態では、教師有りの機械学習方法を用いる。例えば、セマンティックセグメンテーション(Sementic segmentaion)を使用する。ただし、これに限定されず、複数のタイプの機械学習方法を組み合わせても良いし、何か1つの機械学習手法を採用しても良い。
セマンティックセグメンテーション以外の機械学習方法としては、全畳み込みニューラルネットワーク(Fully Convolutional Neural Network)、画像認識で実績のあるR-CNN(Region Convolutional Neural Network)、k-近傍法、ロジスティック回帰、サポートベクターマシン(SVM)、深層学習(Deep Learning)などを用いることができる。
なお、深層学習には、オートエンコーダ、RNN(Recurrent Neural Network)、LSTM(Long Short-Term Memory)、GAN(Generative Adversarial Network)などの各種手法がある。これらの手法を本実施形態に適用しても良いし、他の機械学習の手法を用いても良い。
図12に示すように、判定用3次元超音波データ55は、背景Bとなる空間のボクセルが黒色で表示され、超音波Uが対象物Qに入射された入射範囲32のボクセルがグレー色で表示され、対象物Qの表面33のボクセルが白色で表示され、検出対象Cのボクセルが白色で表示される。図12の例では、2つの検出対象Cが判定用3次元超音波データ55に写っている。そして、判定モデルを用いて、この判定用3次元超音波データ55から判定済データ36(図16)が生成される。なお、判定済データ36は、3次元ボリュームデータとなっている。
図16に示すように、判定済データ36は、背景Bとなる空間のボクセルが黒色で表示され、検出対象Cの端部が存在する可能性が高い領域37ほど、ボクセルが明るく表示される。つまり、グレー色から白色に表示される。図16の例では、2つの領域37が判定済データ36に写っている。そして、この判定済データ36から二値化画像38(図17)が生成される。なお、二値化画像38は、対象物Qのそれぞれの位置(断面)に対応する2次元のデータ(画像)となっている。
図17に示すように、二値化画像38は、背景Bが黒色で表示され、検出対象Cの端部が存在する特定共通領域39が白色で表示される。図17の例では、2つの特定共通領域39が二値化画像38に写っている。そして、この二値化画像38から検出対象Cの位置と深さを求めることができる。
図1に示すように、超音波データ評価装置100は、入力部110と演算部120と判定モデル生成部130と記憶部140と出力部150とを備える。
入力部110には、超音波Uを対象物Qに入射することで得られる超音波画像が外部から入力される。本実施形態では、超音波画像処理装置30から超音波画像が入力される形態を例示するが、他の装置から超音波画像が入力されても良い。
入力部110に入力される超音波画像には、機械学習に用いられる学習用超音波画像31(図6)と判定用3次元超音波データ55(図12)の2種類がある。この入力部110が、本実施形態の学習用データ取得部と判定用データ取得部となっている。
本実施形態では、機械学習を行うときに、複数枚の学習用超音波画像31が入力部110に入力される。そして、この学習用超音波画像群tn(図13)に基づいて、2次元のデータである2次元教師ラベル群ln(図14)が生成される。
さらに、学習用超音波画像群tnを用いて、3次元のデータの集まりである学習用3次元超音波データ群Tk(図13)が生成される。また、2次元教師ラベル群lnを用いて、3次元のデータの集まりである3次元教師ラベル群Lk(図14)が生成される。そして、学習用3次元超音波データ群Tkと3次元教師ラベル群Lkを用いて、判定モデルが生成される。
一方、この判定モデルを用いて判定用3次元超音波データ55の中に含まれる検出対象Cを判定するときに、判定用3次元超音波データ55が入力部110に入力される。なお、判定用3次元超音波データ55は、生成された判定モデルに入力され、検出対象Cが含まれているか否かの判定が行われる。
演算部120は、2次元教師ラベル生成部121と3次元データ生成部122と判定部123と抽出部124と検出対象位置算出部125とノイズ除去部126とを備える。これらは、メモリまたはHDDに記憶されたプログラムがCPUによって実行されることで実現される。
記憶部140は、超音波探傷によって得られた超音波データおよび判定モデルなどを記憶する。この記憶部140は、学習用3次元超音波データ記憶部141と3次元教師ラベル記憶部142と判定モデル記憶部143と判定用3次元超音波データ記憶部144と検出対象位置記憶部145とを備える。これらは、メモリ、HDDまたはクラウドに記憶され、検索または蓄積ができるよう整理された情報の集まりである。
出力部150は、所定の情報の出力を行う。例えば、判定用3次元超音波データ55の検出対象Cの位置を示す3D-CADモデル60(図24)を表示する。この出力部150は、デジタルデータを表示できるものであれば良く、所謂PC用のディスプレイ、テレビジョン、プロジェクタ、ヘッドマウントディスプレイなどが考えられる。また、ブラウン管のように一度アナログ信号化してからその画面に画像を表示させるものでも良い。つまり、超音波データ評価装置100には、解析結果の出力を行う画像の表示を行う装置が含まれる。さらに、出力部150は、紙媒体に所定の情報を印字するプリンタでも良い。また、出力部150は、USBメモリなどの着脱可能で可搬性を有する記憶媒体に所定の情報を書き込むものでも良い。
なお、出力部150は、超音波エコーの合成信号、映像化結果、超音波探傷器10の座標および検出対象Cとの相対位置、遅延時間、焦点深さ、探傷屈折角などの探傷条件を表示しても良い。また、出力部150は、設定した条件に応じて、音または発光によりアラームを生じさせたり、タッチパネルとして操作を入力したりするユーザインタフェース機能を有しても良い。
なお、超音波データ評価装置100は、他の構成を備えても良い。例えば、通信部(図示略)を備えても良い。この通信部は、例えば、インターネットなどの通信回線を介して他のコンピュータと通信を行う。
超音波データ評価装置100の各構成は、必ずしも1つのコンピュータに設ける必要はない。例えば、ネットワークで互いに接続された複数のコンピュータを用いて1つの超音波データ評価装置100を実現しても良い。
2次元教師ラベル生成部121は、それぞれの学習用超音波画像31(図6)に存在する検出対象Cの特定の領域を示す特定共通領域39(図7)を検出対象Cの位置として設定した2次元教師ラベル40を生成する。1つの2次元教師ラベル40は、1つの学習用超音波画像31に対応して生成される。そして、学習用超音波画像群tn(図13)に対応する2次元教師ラベル群ln(図14)が生成される。
図7に示すように、2次元教師ラベル40は、対応する学習用超音波画像31と同一のサイズの画像(2次元のデータ)である。つまり、学習用超音波画像31と同一の画素数を有する画像である。この2次元教師ラベル40では、背景Bが黒色で表示され、検出対象Cの特定共通領域39が白色で表示される。つまり、2次元教師ラベル40は、特定共通領域39の画素値を「1」、それ以外の画素値を「0」として構成される二値画像である。この2次元教師ラベル40における特定共通領域39の位置(座標)は、学習用超音波画像31に写る検出対象Cの上端部の位置に対応している。
2次元教師ラベル40には、検出対象Cのエコー(出現像)がある部分に対応した特定共通領域39を設定する。特定共通領域39は、例えば、亀裂の場合は亀裂端部、ブローホールの場合はその中心部、検出対象Cの種類に合わせて任意に設定できる。この設定は、ユーザが行っても良いし、超音波データ評価装置100が自動的に行っても良い。
検出対象Cが亀裂の場合には、検出対象Cのエコーの端部を特定共通領域39と定める。すると、学習用超音波画像31の特定共通領域39は、亀裂の端部の位置に相当する。そして、超音波データ評価装置100が、学習用超音波画像31から特定共通領域39を検出する。さらに、判定用3次元超音波データ55において、特定共通領域39と対象物Qの表面33のエコーとの距離D(図12)を算出することで、亀裂の深さを求めることができる。
次に、2次元教師ラベル40の生成方法について図25のフローチャートを用いて説明する。なお、図1に示すブロック図を適宜参照する。また、検出対象Cを亀裂とし、その端部を特定共通領域39として説明する。
図25に示すように、まず、ステップS11において、超音波画像処理装置30により複数の学習用超音波画像31(学習用データ)が取得される。これら学習用超音波画像31が超音波データ評価装置100の入力部110(学習用データ取得部)に入力される。
次のステップS12において、検査員、研究者または専門家などのユーザにより、学習用超音波画像31の確認が行われる。ユーザは、それぞれの学習用超音波画像31に亀裂が写っているか否かの精査を行う。
次のステップS13において、2次元教師ラベル生成部121では、学習用超音波画像群tn(図13)に存在する検出対象Cの位置を定義した2次元教師ラベル群ln(図14)を生成する。例えば、2次元教師ラベル生成部121は、学習用超音波画像31(図6)に亀裂が写っている場合に、超音波探傷器10のチャンネルを選定する。例えば、超音波探傷器10が備える複数(例えば、N個)の超音波素子11Aのうち、亀裂の端部からのエコーが含まれる受信波形41(図9)を特定する。そして、この受信波形41を受信した超音波探傷器10のチャンネルを選定する。ここで、そのチャンネルの番号をm(図8)とする。
次のステップS14において、2次元教師ラベル生成部121は、選定されたチャンネル番号mの受信波形41から亀裂の端部のエコーを取得し、このエコーのピーク位置でのビーム路程Xdを求める。なお、チャンネル番号mの選定は、2次元教師ラベル生成部121が行っても良いし、ユーザが行っても良い。
例えば、図9に示すように、チャンネル番号mの受信波形41には、対象物Qの表面33のエコーの波形42と、亀裂の端部のエコーの波形44とが含まれているものとする。そして、チャンネル番号mの受信波形41の振幅の値をAm(X)とする。さらに、受信波形41を絶対値化した波形45を図10に示す。
ここで、2次元教師ラベル生成部121は、Am(X)の絶対値である|Am(X)|から、亀裂の端部のエコーのピークの値|Am(Xd)|を求める。そして、2次元教師ラベル生成部121は、この位置までのビーム路程Xdを求めることができる(図8)。
図25に戻り、次のステップS15において、2次元教師ラベル生成部121は、チャンネル番号m、ビーム路程Xd、屈折角α,βから、2次元教師ラベル40(図7)の特定共通領域39の中心部の座標Ex,Eyを求める(図8)。
次のステップS16において、2次元教師ラベル生成部121は、座標Ex,Eyを中心とする一辺の長さdの正方形を設定する(図11)。ここで、正方形を「1」とし、それ以外を「0」とする二値画像を生成する。この二値画像が2次元教師ラベル40(図7)となる。そして、2次元教師ラベル40の生成方法を終了する。
図11に示すように、本実施形態の特定共通領域39のサイズ(最大長)はdで表される。例えば、d×dの正方形としている。ここで、特定共通領域39の対角線は、亀裂の端部のエコーの波長λの4分の1以上とする。
図9に示すように、波長λの4分の1という長さは、波形の立ち上がりからピークに到達するまでの長さに相当し、亀裂の端部からのエコーの特徴量を含む最小の長さとなる。仮に、特定共通領域39のサイズ(最大長)が波長λの4分の1に満たない場合、特定共通領域39にエコーの特徴が充分に含まれず、亀裂の端部を正しく検出できない可能性が生じる。
なお、いくつかの波が連続しているエコーの場合でも、その波から代表的な波形を取り出し、波長を求める必要がある。
特定共通領域39を円とする場合には、円の直径を波長λの4分の1以上のサイズに設定する。特定共通領域39を楕円とする場合には、楕円の長軸を波長λの4分の1以上に設定する。また、特定共通領域39は、円以外において、多角形、不定形で設定することも可能である。その場合は、それぞれの最大長が波長λの4分の1以上に設定される。
本実施形態では、特定共通領域39のサイズdが、超音波探傷装置20が用いた超音波Uの周波数の波長の4分の1以上であることで、特定共通領域39に検出対象Cの特徴が充分に含まれるようになり、検出対象Cを正しく検出することができる。そして、検出対象Cをノイズと区別できるようになる。
図1に示すように、判定モデル生成部130は、学習用超音波画像31とそれぞれの学習用超音波画像31に対応する2次元教師ラベル40とを用いて、検出対象Cが存在するか否かを判定可能な判定値Yk(図16)を、超音波データ中の位置を示す単位ごとに算出可能な判定モデルを生成する。
本実施形態において、超音波データ中の位置を示す単位とは、例えば、ボクセルデータ(3次元ボリュームデータ)中のボクセルである。なお、ボクセルデータ中の所定のボクセルが存在する位置(座標)は、従来公知の方法で管理されている。
なお、本実施形態では、超音波データ中の位置を示す単位をボクセルとしているが、その他の態様であっても良い。例えば、隣接する複数のボクセルで1つの単位としても良い。また、ボクセルを複数のグリッドで区切り、そのグリッドの1つのマス目(区画)を1つの単位としても良い。
3次元データ生成部122は、超音波探傷器10および超音波探傷装置20を用いて対象物Qを探傷して得られる複数の超音波画像を探傷した位置に対応付けた状態で重ね合わせて3次元的なデータを生成可能となっている。このようにすれば、2次元のデータである超音波画像(学習用超音波画像31または判定用超音波画像35)しか得られない超音波探傷器10および超音波探傷装置20を用いる場合でも、対象物Qの表面を一方向に走査して得られる複数の超音波画像を重ね合わせることで、3次元的なデータであるボクセルデータを得ることができる。
この3次元データ生成部122は、学習用3次元超音波データ51と3次元教師ラベル50と判定用3次元超音波データ55を生成する。いずれの場合も連続する画像を順番通りに重ねて、3次元のデータとして生成する。重ねる枚数として、例えば、4枚以上、16枚以下を目安としている。例えば、少な過ぎると検出対象Cの連続性の情報を活用できず、多すぎると計算量が膨大になるためである。
図13および図14に示すように、学習用データとしては、n枚の学習用超音波画像31の集まりである学習用超音波画像群tnと、これらに対応するn枚の2次元教師ラベル40の集まりである2次元教師ラベル群lnとがある。そして、この学習用超音波画像群tnからk個の学習用3次元超音波データ群Tkが生成される。さらに、この2次元教師ラベル群lnからk個の3次元教師ラベル群Lkが生成される。
また、図15に示すように、本実施形態で判定に用いられる判定用データとしては、n枚の判定用超音波画像35の集まりである判定用超音波画像群xnがある。そして、この判定用超音波画像群xnからk個の判定用3次元超音波データ群Xkが生成される。
なお、学習用3次元超音波データ51と判定用3次元超音波データ55を生成する場合において、取得する複数の超音波画像の枚数は、互いに同じ枚数にする必要がある。さらに、学習用3次元超音波データ51と判定用3次元超音波データ55において、超音波画像を重ねる枚数は、互いに同じ枚数にする必要がある。
また、本実施形態の判定用データは、超音波探傷器10および超音波探傷装置20を用いて対象物Qを探傷して得られる複数の判定用超音波画像35に基づいて、3次元データ生成部122が生成するものである。このようにすれば、検出対象Cを3次元的な構造で判定できるため、判定の精度を高めることができる。また、検出対象Cを認識し易くなる。
次に、判定モデルの生成方法について図26のフローチャートを用いて説明する。なお、図1に示すブロック図を適宜参照する。
図26に示すように、まず、ステップS21において、判定モデル生成部130は、入力部110に入力され、学習用3次元超音波データ記憶部141に格納された複数枚の学習用超音波画像31を取得する。
次のステップS22において、判定モデル生成部130は、複数枚の学習用超音波画像31と、それぞれの学習用超音波画像31に対応する2次元教師ラベル40の対応付けを行う。
次のステップS23において、3次元データ生成部122は、複数枚の学習用超音波画像31に基づいて、学習用3次元超音波データ51の生成を行う。ここで、学習用3次元超音波データ51の集まりである学習用3次元超音波データ群Tk(図13)は、学習用3次元超音波データ記憶部141に格納される。
次のステップS24において、3次元データ生成部122は、複数の2次元教師ラベル40に基づいて、3次元教師ラベル50の生成を行う。ここで、3次元教師ラベル50の集まりである3次元教師ラベル群Lk(図14)は、3次元教師ラベル記憶部142に格納される。このようにすれば、2次元のデータである超音波画像(学習用超音波画像31)しか得られない超音波探傷器10および超音波探傷装置20を用いる場合でも、対象物Qの表面を一方向に走査して得られる複数の超音波画像を重ね合わせることで、3次元教師ラベル50を生成することができる。
次のステップS25において、判定モデル生成部130は、教師あり学習により判定モデルを生成する。この判定モデル生成部130は、k個の学習用3次元超音波データ群Tkと、それぞれに対応する3次元教師ラベル群Lkに基づいて、教師あり学習を行う。
教師あり学習を行うことで、ボクセルデータ(3次元のデータ)中に検出対象Cの特定共通領域39が含まれるか否かを判定し、その判定値Ykをボクセルごとに出力する性能を有する判定モデルが生成される。この判定モデルにより、判定用3次元超音波データ55(図12)を入力値として受け入れた場合に、判定済データ36(図16)を出力値として出力可能となる。
例えば、2次元のデータ(画像)を入出力データとする教師あり学習と比較すると、3次元のデータを用いた教師あり学習では、超音波探傷器10の走査方向の情報を保持できる。そのため、検出対象Cが連続しているときに徐々に輝度値が変化する検出対象Cに特有の傾向を新たに学習することが可能となる。
例えば、教師あり学習方法の1つである畳み込みニューラルネットワークの例として、2次元のデータの畳み込み演算と3次元のデータの畳み込み演算とが存在する。ここで、2次元のデータの畳み込み演算と3次元のデータの畳み込み演算とを比較すると、2次元のデータの畳み込み演算では、2次元の入力データ(画像)と2次元のフィルターで畳み込み演算を行うため、出力データも2次元のデータとなる。一方、3次元のデータの畳み込み演算は、フィルターが3次元なので、奥行方向(走査方向)の情報を失わずに3次元のデータを出力できる。この学習により判定モデルを生成した後、判定用3次元超音波データ群Xkを入力値として受け入れて、判定値Yk(図16)を出力値として出力可能となる。
なお、判定モデルの生成(教師あり学習)には、学習用3次元超音波データ51を可能な限り多く用意し、それらを用いて判定モデルを生成することが望ましい。
また、学習用3次元超音波データ51としては、検出対象Cが存在するものと存在しないものの両方があっても良い。例えば、検出対象Cが存在しない学習用超音波画像31のみを重ね合わせて学習用3次元超音波データ51を生成しても良い。また、学習用3次元超音波データ51には、検出対象Cが存在せず、表面33のエコーのみが存在するものが含まれていても良い。さらに、1つの学習用3次元超音波データ51に対して複数個の検出対象Cが存在するものが含まれていても良い。
次のステップS26において、判定モデル生成部130は、生成した判定モデルを判定モデル記憶部143に格納する。そして、判定モデルの生成方法を終了する。
図1に示すように、判定部123は、判定モデルを用いて、判定用3次元超音波データ55のボクセルごとに、検出対象Cが存在するか否かを示す判定値Ykを算出する。
次に、判定用3次元超音波データ55の評価方法について図27のフローチャートを用いて説明する。なお、図1に示すブロック図を適宜参照する。
図27に示すように、まず、ステップS31において、超音波画像処理装置30により判定用超音波画像35(判定用データ)が取得される。この判定用超音波画像35が超音波データ評価装置100の入力部110(判定用データ取得部)に入力される。
次のステップS32において、3次元データ生成部122は、複数枚の判定用超音波画像35に基づいて、判定用3次元超音波データ55の生成を行う。ここで、判定用3次元超音波データ55の集まりである判定用3次元超音波データ群Xk(図15)は、判定用3次元超音波データ記憶部144に格納される。
次のステップS33において、判定部123は、判定用3次元超音波データ記憶部144に格納された判定用3次元超音波データ群Xk(図15)を学習済みの判定モデルに入力し、判定値Ykとしての判定済データ36(図16)を生成する。
図16に示すように、判定済データ36(判定値Yk)は、判定用3次元超音波データ55と同一のサイズのボクセル(3次元のデータ)である。判定済データ36のそれぞれのボクセルは、判定値Ykとしての「0」から「1」までの連続値で表される。
図18に示すように、判定済データ36では、検出対象Cの端部が存在する可能性が高い領域37ほど、ボクセルが明るく表示される。例えば、判定値Ykが「0」の場合は黒色のボクセル値となる。判定値Ykが「1」の場合は白色のボクセル値となる。判定値Ykが「0」を超え、かつ「1」未満の場合はグレー色のボクセル値となる。つまり、判定済データ36では、判定値Ykが「1」に近いほど、特定共通領域39が存在する可能性が高いことを表している。
図27に戻り、次のステップS34において、抽出部124は、判定値Ykを含む判定済データ36(図16)から検出対象Cの位置を抽出する。この抽出部124は、判定済データ36において、判定用超音波画像35の取得位置、例えば、対象物Q(図3)のそれぞれの位置(Xn~Xn+4)に対応する部分で二値化処理を行い、特定共通領域39を抽出した二値化画像38(図17)をそれぞれ生成する。
図17および図19に示すように、1つの判定済データ36(判定値Ykのボクセルデータ)を2階調化して複数枚の二値化画像38が生成される。例えば、ユーザが予め閾値を設定する。そして、判定済データ36のそれぞれのボクセル値が、閾値を上回っている場合は白色の値「1」に置換し、閾値を下回っている場合は黒色の値「0」に置換する。その後、判定済データ36(3次元のデータ)を1枚1枚の2次元のデータへスライスする。つまり、1つの判定済データ36を複数の二値化画像38に分ける。このようにすれば、スライスされた2次元のデータである二値化画像38に特定共通領域39の像を出現させることができる。
図27に戻り、次のステップS35において、検出対象位置算出部125は、抽出部124で抽出された特定共通領域39に基づいて、検出対象Cの位置(亀裂の位置)を算出する。さらに、この検出対象Cの位置に基づいて検出対象Cの深さ寸法を計算する。
例えば、検出対象位置算出部125は、二値化画像38の特定共通領域39の中心位置の座標(Gx1,Gy1およびGx2,Gy2)を算出する(図19)。この座標は、必ずしもその二値化画像38における特定共通領域39の中心である必要はない。例えば、二値化画像38の特定共通領域39の中で最大強度を持つ座標でも良い、または、所定の閾値を超える画素群の重心を座標としても良い。即ち、特定のロジックによって一意に求められるものであれば良い。
検出対象位置算出部125は、二値化画像38の特定共通領域39の中心位置の座標と、対象物Qの表面33のエコーまでの相対距離(亀裂の深さ)を算出する。例えば、対象物Qの表面33から検出対象Cの端部の位置までの距離Dを算出する(図12)。なお、距離を算出するときには、画素数から長さの次元への換算を行う。
なお、対象物Qの表面33の位置は、所定の方法で予め求められているものとする。例えば、対象物Qの表面33の座標の計算方法は、それぞれのエコーの最大値を座標としても良いし、所定の閾値を超えるエコーの中心を用いても良い。
また、検出対象位置算出部125は、算出した検出対象C(亀裂)の位置と深さを検出対象位置記憶部145に格納するとともに、出力部150を用いて出力する。
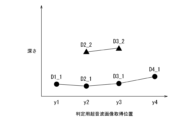
次のステップS36において、ノイズ除去部126は、検出対象Cの位置(亀裂の深さ)を、判定用超音波画像35の取得位置(例えば、図3に示す対象物Qにおけるそれぞれの位置(Xn~Xn+4))ごとにプロットして、検出対象Cに起因するエコーとノイズに起因するエコーの判別を行う。例えば、判定用超音波画像35の取得位置ごとに二値化画像38の特定共通領域39を取得して判別を行う。
ここで、検出対象Cに起因するエコー(二値化画像38の特定共通領域39)は、連続して出力される特徴がある。このことから、検出対象Cに起因するものである可能性が高いエコーは、着目している判定用超音波画像35の1つ前または1つ後の判定用超音波画像35とほぼ同じ箇所(深さ)にエコーが出力される。
例えば、図20および図22に示すように、連続する4枚の判定用超音波画像35に対応する二値化画像38(y1~y4)が有る場合において、画像y1から画像y4まで連続して出力されるエコーD1_1~D4_1は、検出対象Cである可能性が高い。さらに、画像y2と画像y3に連続して出力されるエコーD2_2~D3_2も、検出対象Cである可能性が高い。
一方、着目している判定用超音波画像35の1つ前または1つ後の判定用超音波画像35とほぼ同じ箇所(深さ)にエコー(特定共通領域39)が存在せず、単発的にエコーが出力されている場合は、そのエコーが検出対象Cである可能性は低く、判定用超音波画像35のノイズを誤ってエコーとして出力してしまった可能性が高い。例えば、図21および図23に示すように、連続する4枚の判定用超音波画像35に対応する二値化画像38(y5~y8)が有る場合において、画像y7のみに出力されるエコーD7_1は、ノイズである可能性が高い。
このように、連続している判定用超音波画像35のそれぞれのエコーを考慮することで、エコーが真に検出対象Cを検出したものであるか、ノイズを誤検出したものであるかを精度よく判別できる。
次のステップS37において、演算部120は、検出対象Cを模した3D-CADモデル60(図24)に検出対象Cの位置の座標をプロットする。そして、この3D-CADモデル60を、出力部150を用いて出力する。そして、判定用3次元超音波データ55の評価方法を終了する。このようにすれば、対象物Qにおいて亀裂が発生した位置を3次元で可視化することができ、ユーザが対象物Qの劣化の状況を把握しやすくなり、検査後の補修の提案などに活用することができる。
本実施形態では、検出対象Cのエコー全体をラベル付けするのではなく、検出対象Cの端部のみをラベル付けしている。そのため、2次元教師ラベル40の作成のための労力を格段に低減させることができる。また、検出対象Cの全部ではなく、その端部のみを検出させるため、超音波画像のそれぞれで検出対象Cの形状が異なっても、その深さの計測に共通して必要な端部(特定共通領域39)を安定して検出することができる。
また、特定共通領域39が、検出対象Cの端部であることで、検出対象Cが存在する深さを求める精度を向上させることができる。
また、抽出部124が、判定用3次元超音波データ55(図12)から算出された判定値Ykを含む判定済データ36(図16)から検出対象Cの位置を抽出することで、判定済データ36から検出対象Cの位置を抽出し、判定用3次元超音波データ55に存在する検出対象Cを検出することができる。
また、抽出部124が、超音波データ中の位置を示す単位ごとの判定値Yk(図16)を閾値に基づいて二値化して検出対象Cの位置を抽出することで、判定済データ36における検出対象Cが存在する可能性が高い部分を抽出することができる。
なお、本実施形態の単位をボクセルとすることで、ボクセルデータの最小単位であるボクセルごとに処理を行えるようになり、詳細に判定用3次元超音波データ55を判定することができる。
また、本実施形態では、2次元のデータである超音波画像(判定用超音波画像35)を奥行方向(走査方向)に重ね合わせて3次元のボクセルデータ(ボリュームデータ)として扱うことで、超音波画像の評価(ボクセルデータの評価)において、検出対象C(欠陥)の位置と深さをより確実に特定することができる。
さらに、本実施形態では、3次元の超音波データを生成することで検出対象Cの連続性の情報を保持し、それを用いて学習させた判定モデルを生成することができる。このようにすれば、従来の1枚の超音波画像に対してセグメンテーションを実行する方法と比較して、検出対象Cの連続性という新たな情報を加味した判定を行うことができる。
なお、本実施形態において、基準値(閾値)を用いた任意の値(画素値またはボクセル値)の判定は、「任意の値が基準値以上か否か」の判定でも良いし、「任意の値が基準値を超えているか否か」の判定でも良い。或いは、「任意の値が基準値以下か否か」の判定でも良いし、「任意の値が基準値未満か否か」の判定でも良い。また、基準値が固定されるものでなく、変化するものであっても良い。従って、基準値の代わりに所定範囲の値を用い、任意の値が所定範囲に収まるか否かの判定を行っても良い。また、予め装置に生じる誤差を解析し、基準値を中心として誤差範囲を含めた所定範囲を判定に用いても良い。
なお、本実施形態のフローチャートにおいて、各ステップが直列に実行される形態を例示しているが、必ずしも各ステップの前後関係が固定されるものでなく、一部のステップの前後関係が入れ替わっても良い。また、一部のステップが他のステップと並列に実行されても良い。
本実施形態のシステムは、専用のチップ、FPGA(Field Programmable Gate Array)、GPU(Graphics Processing Unit)、またはCPU(Central Processing Unit)などのプロセッサを高集積化させた制御装置と、ROM(Read Only Memory)またはRAM(Random Access Memory)などの記憶装置と、HDD(Hard Disk Drive)またはSSD(Solid State Drive)などの外部記憶装置と、ディスプレイなどの表示装置と、マウスまたはキーボードなどの入力装置と、通信インターフェースとを備える。このシステムは、通常のコンピュータを利用したハードウェア構成で実現できる。
なお、本実施形態のシステムで実行されるプログラムは、ROMなどに予め組み込んで提供される。もしくは、このプログラムは、インストール可能な形式または実行可能な形式のファイルでCD-ROM、CD-R、メモリカード、DVD、フレキシブルディスク(FD)などのコンピュータで読み取り可能な非一過性の記憶媒体に記憶されて提供するようにしても良い。
また、このシステムで実行されるプログラムは、インターネットなどのネットワークに接続されたコンピュータ上に格納し、ネットワーク経由でダウンロードさせて提供するようにしても良い。また、このシステムは、構成要素の各機能を独立して発揮する別々のモジュールを、ネットワークまたは専用線で相互に接続し、組み合わせて構成することもできる。
なお、本実施形態では、超音波検査で取得した画像の解析を例示しているが、その他の態様であっても良い。例えば、X線検査、可視光検査、顕微鏡検査、赤外線検査、紫外線検査などで取得した画像の解析に本実施形態を適用しても良い。
また、本実施形態では、超音波画像(またはボクセルデータ)がグレースケール画像であるものとして説明したが、その他の態様であっても良い。例えば、超音波画像がRGBなどで表されるカラー画像でも良い。その場合には、例えば、閾値を上回っている画素値を赤色にし、閾値以下の画素値を青色として、表示の形態に特徴を持たせても良い。
なお、本実施形態の学習用データは、超音波探傷装置20により得られる複数の学習用超音波画像31から生成される学習用3次元超音波データ51となっているが、その他の態様であっても良い。さらに、本実施形態の判定用データは、超音波探傷装置20により得られる複数の判定用超音波画像35から生成される判定用3次元超音波データ55となっているが、その他の態様であっても良い。例えば、超音波探傷器10がマトリックス・アレイ・プローブで構成され、対象物Qの超音波データを最初からボクセルデータである学習用3次元超音波データ51または判定用3次元超音波データ55として取得しても良い。また、この場合における特定共通領域39(図11)は、立方体であっても良い。
さらに、本実施形態の学習用データは、超音波探傷装置20により得られるボクセルデータまたはこれを模して生成されるボクセルデータの少なくとも一方でも良い。このようにすれば、3次元的な情報で検出対象Cの学習を行えるため、学習の効率が向上する。
以上説明した実施形態によれば、判定モデルを用いて、判定用データ中の位置を示す単位ごとに判定値を算出する判定部を備えることにより、非破壊検査に用いるボクセルデータの評価において対象物に含まれる検出対象の位置を検出する精度を向上させることができる。
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更、組み合わせを行うことができる。これら実施形態またはその変形は、発明の範囲と要旨に含まれると同様に、特許請求の範囲に記載された発明とその均等の範囲に含まれるものである。