JP7590457B2 - ロボットを用いた3dプリンタ及びロボットの制御装置 - Google Patents
ロボットを用いた3dプリンタ及びロボットの制御装置 Download PDFInfo
- Publication number
- JP7590457B2 JP7590457B2 JP2022566892A JP2022566892A JP7590457B2 JP 7590457 B2 JP7590457 B2 JP 7590457B2 JP 2022566892 A JP2022566892 A JP 2022566892A JP 2022566892 A JP2022566892 A JP 2022566892A JP 7590457 B2 JP7590457 B2 JP 7590457B2
- Authority
- JP
- Japan
- Prior art keywords
- path
- robot
- planned
- control command
- deviation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1628—Program controls characterised by the control loop
- B25J9/1638—Program controls characterised by the control loop compensation for arm bending/inertia, pay load weight/inertia
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
- B25J13/085—Force or torque sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1628—Program controls characterised by the control loop
- B25J9/1633—Program controls characterised by the control loop compliant, force, torque control, e.g. combined with position control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1679—Program controls characterised by the tasks executed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B29—WORKING OF PLASTICS; WORKING OF SUBSTANCES IN A PLASTIC STATE IN GENERAL
- B29C—SHAPING OR JOINING OF PLASTICS; SHAPING OF MATERIAL IN A PLASTIC STATE, NOT OTHERWISE PROVIDED FOR; AFTER-TREATMENT OF THE SHAPED PRODUCTS, e.g. REPAIRING
- B29C64/00—Additive manufacturing, i.e. manufacturing of three-dimensional [3D] objects by additive deposition, additive agglomeration or additive layering, e.g. by 3D printing, stereolithography or selective laser sintering
- B29C64/20—Apparatus for additive manufacturing; Details thereof or accessories therefor
- B29C64/205—Means for applying layers
- B29C64/209—Heads; Nozzles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B29—WORKING OF PLASTICS; WORKING OF SUBSTANCES IN A PLASTIC STATE IN GENERAL
- B29C—SHAPING OR JOINING OF PLASTICS; SHAPING OF MATERIAL IN A PLASTIC STATE, NOT OTHERWISE PROVIDED FOR; AFTER-TREATMENT OF THE SHAPED PRODUCTS, e.g. REPAIRING
- B29C64/00—Additive manufacturing, i.e. manufacturing of three-dimensional [3D] objects by additive deposition, additive agglomeration or additive layering, e.g. by 3D printing, stereolithography or selective laser sintering
- B29C64/20—Apparatus for additive manufacturing; Details thereof or accessories therefor
- B29C64/227—Driving means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B29—WORKING OF PLASTICS; WORKING OF SUBSTANCES IN A PLASTIC STATE IN GENERAL
- B29C—SHAPING OR JOINING OF PLASTICS; SHAPING OF MATERIAL IN A PLASTIC STATE, NOT OTHERWISE PROVIDED FOR; AFTER-TREATMENT OF THE SHAPED PRODUCTS, e.g. REPAIRING
- B29C64/00—Additive manufacturing, i.e. manufacturing of three-dimensional [3D] objects by additive deposition, additive agglomeration or additive layering, e.g. by 3D printing, stereolithography or selective laser sintering
- B29C64/30—Auxiliary operations or equipment
- B29C64/386—Data acquisition or data processing for additive manufacturing
- B29C64/393—Data acquisition or data processing for additive manufacturing for controlling or regulating additive manufacturing processes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B33—ADDITIVE MANUFACTURING TECHNOLOGY
- B33Y—ADDITIVE MANUFACTURING, i.e. MANUFACTURING OF THREE-DIMENSIONAL [3D] OBJECTS BY ADDITIVE DEPOSITION, ADDITIVE AGGLOMERATION OR ADDITIVE LAYERING, e.g. BY 3D PRINTING, STEREOLITHOGRAPHY OR SELECTIVE LASER SINTERING
- B33Y30/00—Apparatus for additive manufacturing; Details thereof or accessories therefor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B33—ADDITIVE MANUFACTURING TECHNOLOGY
- B33Y—ADDITIVE MANUFACTURING, i.e. MANUFACTURING OF THREE-DIMENSIONAL [3D] OBJECTS BY ADDITIVE DEPOSITION, ADDITIVE AGGLOMERATION OR ADDITIVE LAYERING, e.g. BY 3D PRINTING, STEREOLITHOGRAPHY OR SELECTIVE LASER SINTERING
- B33Y50/00—Data acquisition or data processing for additive manufacturing
- B33Y50/02—Data acquisition or data processing for additive manufacturing for controlling or regulating additive manufacturing processes
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
- G05B2219/39529—Force, torque sensor in wrist, end effector
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40586—6-DOF force sensor
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/49—Nc machine tool, till multiple
- G05B2219/49008—Making 3-D object with model in computer memory
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Materials Engineering (AREA)
- Mechanical Engineering (AREA)
- Manufacturing & Machinery (AREA)
- Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Robotics (AREA)
- Human Computer Interaction (AREA)
- Manipulator (AREA)
Description
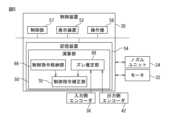
図5は、ロボット制御装置30の第1実施例の機能ブロック図である。制御装置30は、例えばCPU、RAM等を有する演算部50と、液晶ディスプレイ等の表示装置52と、不揮発性ストレージ、ROM等を有する記憶装置54とを有し、演算部50は記憶装置54に含まれ得る。また制御装置30には、操作者が持ち運び可能な可搬式操作盤56が、有線又は無線で通信可能に接続され、操作盤56への操作者の入力内容等は制御装置30に送信・入力される。
図11は、ロボット制御装置30の第2実施例の機能ブロック図である。なお第2実施例では、第1実施例と異なる点のみを説明し、第1実施例と同様でよい点については説明を省略する。
図14は、比較例として、フィラメント塗布時に適正な反力が得られなかった場合の塗布状態の一例を示す。ここでは、造形対象物12の塗布表面61が、平坦ではなく凹凸を有している。図2に関して説明したように、フィラメント26を塗布しているときのノズル27には塗布反力58及び62が作用するが、塗布面61が凹凸を有するような場合は特に、塗布反力が大きく変動することがある。塗布反力が想定値より大きいとフィラメント26が潰れる等の不具合が生じ、逆に小さいとフィラメント26が塗布面61に馴染まず、図14に示すように塗布面61から剥離する等の不具合が生じる。また塗布面の凹凸以外にも、塗布面又は周囲の温度、湿度、ロボットの軌跡のブレ、ノズルの状態等によって、塗布反力は変動することがあり、この変動はプリント品質に悪影響をもたらす。
次に、ロボット制御装置30の第4実施例を説明する。なお第4実施例は、第2実施例と第3実施例とを組み合わせたものに概ね相当するが、ここでは第2実施例及び第3実施例と異なる点のみを説明し、第2実施例又は第3実施例と同様でよい点については説明を省略する。
12 造形対象物
24 ノズルユニット
26 フィラメント
27 ノズル
30 ロボット制御装置
32 モータ
36 入力側エンコーダ
42 出力側エンコーダ
50 演算部
52 表示装置
54 記憶装置
56 操作盤
57 制御部
58、62 塗布反力
60、61 塗布面
66 制御指令格納部
68 ズレ推定部
70 制御指令補正部
74 再計算部
82 力センサ
84 塗布状態推定部
Claims (8)
- 造形対象物の材料を吐出するノズルを備えた多関節ロボットを制御するロボット制御装置であって、
前記ノズルが前記造形対象物に対して前記材料を塗布しながら移動するときに従うべきプリント予定経路を含む制御指令を格納する制御指令格納部と、
前記制御指令に基づいて動作した前記多関節ロボットの関節の入力側及び出力側のそれぞれの角度情報に基づいて、前記ノズルの実際の動作軌跡であるプリント済み経路を求め、該プリント済み経路と前記プリント予定経路とのズレを推定するズレ推定部と、
推定された前記ズレを低減又は排除すべく前記制御指令を補正する制御指令補正部と、
を有する、ロボット制御装置。 - 前記プリント予定経路と前記プリント済み経路とのズレが段階的に低減され、塗布の幅方向について前記プリント予定経路に漸近するようにプリント補正予定経路を生成する再計算部をさらに有し、
前記制御指令補正部は、前記再計算部が生成した前記プリント補正予定経路、及び該プリント補正予定経路と前記プリント済み経路とのズレに基づいて、前記制御指令を補正する、請求項1に記載のロボット制御装置。 - 前記材料の吐出中に前記ノズルに作用する反力に基づいて前記造形対象物の塗布状態を推定する塗布状態推定部をさらに有し、
前記制御指令補正部は、前記反力が、前記塗布状態に基づいて予め定めた目標範囲内になるように前記制御指令を補正する、請求項1又は2に記載のロボット制御装置。 - 前記プリント予定経路と前記プリント済み経路とのズレが段階的に低減される複数のプリント補正予定経路を生成する再計算部をさらに有し、
前記制御指令補正部は、前記プリント補正予定経路に基づいて、前記プリント済み経路が前記材料の塗布の厚さ方向について前記プリント予定経路に漸近するように前記制御指令を段階的に補正する、請求項3に記載のロボット制御装置。 - 前記再計算部は、以前に生成したプリント済み経路及び前記造形対象物の形状に基づいて新たなプリント予定経路を生成する、請求項2又は4に記載のロボット制御装置。
- 造形対象物の材料を塗布して積層するノズルを備えた多関節ロボットと、
前記多関節ロボットを制御する請求項1~5のいずれか1項に記載のロボット制御装置と、を備える3Dプリンタ。 - 前記多関節ロボットは、前記入力側の角度情報を取得する入力側エンコーダと、前記出力側の角度情報を取得する出力側エンコーダとを有する、請求項6に記載の3Dプリンタ。
- 前記多関節ロボットは、前記ノズルに作用する反力を検出する力センサを有する、請求項6又は7に記載の3Dプリンタ。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020200551 | 2020-12-02 | ||
| JP2020200551 | 2020-12-02 | ||
| PCT/JP2021/043480 WO2022118760A1 (ja) | 2020-12-02 | 2021-11-26 | ロボットを用いた3dプリンタ及びロボットの制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2022118760A1 JPWO2022118760A1 (ja) | 2022-06-09 |
| JP7590457B2 true JP7590457B2 (ja) | 2024-11-26 |
Family
ID=81853905
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022566892A Active JP7590457B2 (ja) | 2020-12-02 | 2021-11-26 | ロボットを用いた3dプリンタ及びロボットの制御装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US12434383B2 (ja) |
| JP (1) | JP7590457B2 (ja) |
| CN (1) | CN116529086B (ja) |
| DE (1) | DE112021005044T5 (ja) |
| WO (1) | WO2022118760A1 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20250296228A1 (en) * | 2022-05-18 | 2025-09-25 | Mitsubishi Electric Corporation | Control device, robot system, learning device, and recording medium |
| JP2024045929A (ja) * | 2022-09-22 | 2024-04-03 | セイコーエプソン株式会社 | ロボットの教示方法および立体物印刷装置 |
| CN117621440A (zh) * | 2023-12-13 | 2024-03-01 | 江阴勰力机械科技有限公司 | 一种3d打印校正方法及3d打印参数优化系统 |
| CN117962315B (zh) * | 2024-03-29 | 2024-05-28 | 极致创新智能科技(南通)有限公司 | 一种3d打印设备智能控制系统 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016218934A (ja) | 2015-05-26 | 2016-12-22 | 株式会社アイエイアイ | ロボット言語プログラムの修正装置,方法およびプログラム |
| JP2017209762A (ja) | 2016-05-26 | 2017-11-30 | キヤノン株式会社 | ロボット装置、ロボット制御方法、プログラム、記録媒体及び物品の製造方法 |
| JP2019136711A (ja) | 2018-02-06 | 2019-08-22 | 株式会社神戸製鋼所 | 積層造形物の製造方法 |
| JP2020189484A (ja) | 2019-05-23 | 2020-11-26 | ザ・ボーイング・カンパニーThe Boeing Company | ワークピースの熱特性に応じて調整して冷却するアディティブマニュファクチャリング |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102010004496B4 (de) * | 2010-01-12 | 2020-06-18 | Hermann Müller | Verfahren zum Betrieb einer Vorrichtung zum Beschichten und/oder Bedrucken eines Werkstückes |
| EP2835249B1 (en) * | 2013-08-08 | 2019-03-06 | ABB Schweiz AG | Printing system for three-dimensional objects |
| JP6659096B2 (ja) | 2014-07-09 | 2020-03-04 | キヤノン株式会社 | ロボット装置の制御方法、およびロボット装置 |
| TN2019000071A1 (en) | 2016-09-14 | 2020-07-15 | Armatron Systems Llc | Method of reinforced cementitious construction by high speed extrusion printing and apparatus for using same |
| EP3676102B1 (en) * | 2017-08-31 | 2024-05-22 | MacDonald, Dettwiler and Associates Inc. | Robotic livery printing system |
| JP6924685B2 (ja) | 2017-12-06 | 2021-08-25 | 三菱重工業株式会社 | 複合材料成形方法 |
| JP2020104177A (ja) | 2018-12-25 | 2020-07-09 | キヤノン株式会社 | ロボット装置、ロボット装置の制御方法、プログラム、記録媒体、物品の製造方法 |
| JP7381204B2 (ja) | 2019-01-29 | 2023-11-15 | ファナック株式会社 | ロボット |
| CN110271185A (zh) * | 2019-07-01 | 2019-09-24 | 严铜 | 用于熔融沉积型3d打印机的进料装置 |
-
2021
- 2021-11-26 US US18/037,875 patent/US12434383B2/en active Active
- 2021-11-26 CN CN202180080780.3A patent/CN116529086B/zh active Active
- 2021-11-26 WO PCT/JP2021/043480 patent/WO2022118760A1/ja not_active Ceased
- 2021-11-26 JP JP2022566892A patent/JP7590457B2/ja active Active
- 2021-11-26 DE DE112021005044.3T patent/DE112021005044T5/de active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016218934A (ja) | 2015-05-26 | 2016-12-22 | 株式会社アイエイアイ | ロボット言語プログラムの修正装置,方法およびプログラム |
| JP2017209762A (ja) | 2016-05-26 | 2017-11-30 | キヤノン株式会社 | ロボット装置、ロボット制御方法、プログラム、記録媒体及び物品の製造方法 |
| JP2019136711A (ja) | 2018-02-06 | 2019-08-22 | 株式会社神戸製鋼所 | 積層造形物の製造方法 |
| JP2020189484A (ja) | 2019-05-23 | 2020-11-26 | ザ・ボーイング・カンパニーThe Boeing Company | ワークピースの熱特性に応じて調整して冷却するアディティブマニュファクチャリング |
Also Published As
| Publication number | Publication date |
|---|---|
| CN116529086A (zh) | 2023-08-01 |
| WO2022118760A1 (ja) | 2022-06-09 |
| CN116529086B (zh) | 2026-02-27 |
| US12434383B2 (en) | 2025-10-07 |
| DE112021005044T5 (de) | 2024-01-11 |
| US20240009836A1 (en) | 2024-01-11 |
| TW202222518A (zh) | 2022-06-16 |
| JPWO2022118760A1 (ja) | 2022-06-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7590457B2 (ja) | ロボットを用いた3dプリンタ及びロボットの制御装置 | |
| US9221176B2 (en) | Robot system and method for controlling the same | |
| EP3345764B1 (en) | 3d printing device and printing correction method | |
| JP6351293B2 (ja) | ロボットシステム、および物品の製造方法 | |
| JP6430986B2 (ja) | ロボットを用いた位置決め装置 | |
| JP2005346718A (ja) | 操縦機器の位置精度を改善するための方法および装置 | |
| KR20160010868A (ko) | 비전을 갖는 자동화 기계가공 헤드 및 방법 | |
| CN101396830A (zh) | 机器人装置的控制方法以及机器人装置 | |
| JP2011214931A (ja) | 機上計測装置のプローブ取り付け位置算出方法 | |
| CN110142762B (zh) | 一种机器人关节位置控制方法、装置和机器人 | |
| US10220479B2 (en) | Machining apparatus | |
| JP6088601B2 (ja) | 走行軸付きロボットにおけるツール先端の振れを抑制するロボット制御装置 | |
| CN111819037A (zh) | 校正函数生成装置、机器人控制系统及机器人系统 | |
| JP6589921B2 (ja) | 塗布方法及び塗布装置 | |
| JP5631787B2 (ja) | サーボモータ制御装置及びサーボモータ制御方法 | |
| CN112118918B (zh) | 折弯跟随轨迹规划方法、折弯系统、机器人和存储装置 | |
| TWI917483B (zh) | 使用了機器人的3d印表機及機器人的控制裝置 | |
| JP2019038230A (ja) | 三次元造形装置および三次元造形方法 | |
| JP6343938B2 (ja) | ロボット、制御装置、ロボットシステム及び制御方法 | |
| JP7466801B1 (ja) | 制御装置、工作機械システム、および加工方法 | |
| EP3781363B1 (en) | Method for controlling a robot arm | |
| US20200114507A1 (en) | Method of controlling robot body, method of manufacturing product, robot apparatus, and recording medium | |
| US11338406B2 (en) | Estimating device and estimating system | |
| JP7703940B2 (ja) | 加工経路生成装置、加工経路生成方法及びコンピュータプログラム | |
| US11630426B2 (en) | Control system and non-transitory computer readable recording medium |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230711 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240625 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20241015 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20241114 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7590457 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |