概要
いくつかの実施形態による、建物の可変冷媒流(VRF)システムの特性を予測し、かつVRFシステム及びVRFシステム構成要素を動作させる際に、人工知能(AI)を利用するための図、システム及び方法を概して参照する。特に、本開示は、AIを利用して、VRFシステムで使用されるオイルの特性を予測するとともに、VRFシステム内のモータ及びコンプレッサの様々な状態及び特性を予測する。
しかしながら、本明細書に記載されるシステム及び方法は、VRFシステムに限定されないことを理解されたい。むしろ、VRFシステムは、本開示の潜在的な実装態様の1つとして、例のためにのみ示され、説明される。本明細書に記載のシステム及び方法は、オイルが装置に提供されることを必要とする様々なシステム(例えば、他の環境制御システム)、並びにコンプレッサ、モータ、オイルを使用する任意のタイプの装置、及び/又は動作中に振動若しくは障害を経験する可能性のある任意のタイプの装置を含む他のタイプのシステムに適用することができる。例えば、本明細書に記載のシステム及び方法は、様々な暖房、換気、又は空調(HVAC)システム及びデバイス(例えば、様々な空調装置、可変風量(VAV)システム、住宅空調(RAC)システムなど)に適用することができる。
本明細書で言及されるように、AI及びAIモデルは、VRFシステム内のデバイスに関連付けられた状態及び他の情報を予測する際に使用することができる様々な異なるモデルを記述するために使用することができる。いくつかの実施形態では、リカレントニューラルネットワーク(RNN)モデルは、予測を生成するために利用される。RNNは、ノード間の接続が、時間的シーケンスに沿って有向グラフを形成する、人工ニューラルネットワークのクラスである。より具体的には、長期短期メモリ(LSTM)モデルは、予測を生成する際に利用され得る。LSTMは、主に深層学習に使用される特定のタイプの人工RNNアーキテクチャである。LSTMは、時系列データのシーケンス全体を分類及び処理することができ、当該時系列データに基づいて予測を行うことができる。有利には、LSTMは、時系列内の重要なイベント間の未知の持続時間の遅れを説明することができる。いくつかの実施形態では、畳み込みニューラルネットワーク(CNN)などの他のタイプのAIモデルが、予測を生成する際に利用される。したがって、様々なタイプのAIモデルが、予測を生成する際に利用されることができることを理解されたい。
本明細書で定義されるように、本明細書で「オイル特性」という用語と互換的に使用されるオイルの特性は、オイルの特定の性質を指すことができる。言い換えると、オイル特性は、オイルの可変状態又はコンディションであり得る。VRFシステムのオイル特性(すなわち、オイルの可変状態又はコンディション)は、例えば、VRFシステムの1つ以上のコンプレッサのオイル量、VRFシステムのアキュムレータのオイル量、オイルの粘度などを含み得る。いくつかの実施形態では、オイル冷媒混合物の粘度は、単にオイルの粘度の代わりに、又はそれに加えて推定される。この場合、オイル冷媒混合物は、コンプレッサによって典型的に出力される圧縮された冷媒にオイルが統合された結果として、VRFシステムのコンプレッサによって出力され得る。VRFシステムが動作されると、オイルの特性は、経時的に変化し得、それによってVRFシステム内の建物デバイス(例えば、コンプレッサ、バルブ、オイルセパレータなど)の動作の変化につながる。例えば、オイルを使用するコンプレッサが、より高い速度で動作する場合、コンプレッサ内のオイルの量は低下し得、オイルの粘度は、コンプレッサのより高い動作温度に起因して低下し得る。
具体的には、VRFシステムに関して、従来の時間ベースのオイル戻りシステムは、VRFシステムによって提供される加熱及び/又は冷却を周期的に中断し得、VRFシステムの全体的な効率を低下させ得る。冷凍サイクルにおいて、オイルドリフト及び他の関連する問題は、VRFシステムの全体的な動作状態にしばしば有害である、特定の室内熱交換器又は室外熱交換器が長期間利用されることをもたらし得る。更に、VRFデバイス(例えば、コンプレッサ)が、十分なオイルを受け取ることができない場合、VRFデバイスは、故障のリスクが高い可能性がある。従来のオイル戻りシステムは、故障、及び不正確なオイル戻りに関連付けられた他の壊滅的な問題を軽減することができるが、多くの場合、VRFシステムの効率に大きな影響がある。例えば、定期的なオイル戻りでは、オイル戻り状態に遷移した後、VRFシステムのコンプレッサは、動作速度を低下させる、及び/又は再起動する必要があり得、それによって、加熱/冷却システムの効率損失をもたらす。
以下に詳細に記載されるように、従来のオイル戻りシステム(例えば、時間ベースのオイル戻り)に関連する問題は、AIの利用により対処することができる。AIは、様々な建物デバイスにおけるオイル量及びオイルの粘度を予測するために使用することができる。当該予測に基づいて、AIは、VRFシステムが、冷却/暖房動作中であるときに、オイル戻りを実行するための最適な時間を決定することができる。有利には、AIによって実行される予測は、オイルセンサを使用することなく行うことができる。オイルセンサを利用してオイル状態(例えば、オイル量、オイル粘度など)を検出する必要がないことは、購入及び維持する部品が少なくて済むため、コストを削減することができる。
いくつかの実施形態では、AIモデルを利用して、VRFシステムのコンプレッサに関連付けられた振動を管理することができる。コンプレッサの過度の振動は、より高い運用コスト、保守コスト、及び交換コストに起因して、急速な劣化をもたらし、したがって、長期間にわたってコストの増加をもたらす可能性がある。振動を管理するために、特定のAIモデル(例えば、RNNモデル)を、直軸(D軸)及び横軸(Q軸)に関連付けられた目標電流を予測するように、訓練することができる。目標電流の予測は、例えば、インバータによって提供される周波数、実際の騒音レベル、q軸フィードバック電流、軸間の軸誤差など、コンプレッサに関連付けられた入力に基づいてもよい。予測されたD軸電流及びQ軸電流を使用して、コンプレッサの相関振動を決定することができる。予測された電流及び/又は予測された振動が高すぎる(例えば、予測された電流が電流値の閾値よりも高い)場合、コンプレッサの動作は、過度の振動を回避するように変更され、それによってコンプレッサの急速な劣化を回避することができる。具体的には、一定の入力電流及び速度制御を実装して、振動を低減することができる。
いくつかの実施形態では、AIモデルを利用して、VRFシステム内のコンプレッサの障害コンディションを予測することができる。障害コンディションは、好ましい動作コンディションを超えているコンプレッサの動作状態を指すことができる。例えば、VRFシステムの障害コンディションは、冷媒漏れ、室外ユニットの霜降り、室内ファンの目詰まり、汚れた室内フィルタ、汚れた熱交換器、汚れた室外ファン、モータ消磁、コンプレッサオイル漏れ、及びコンプレッサの不完全な効率をもたらす他のコンディションを含むことができる。コンディションを予測するために、AIモデル(例えば、RNNモデル)は、コンプレッサに関連付けられた入力の値を障害分類にマッピングするように訓練され得る。障害分類は、入力データのセットに基づいて、VRFシステムに対してどのような障害コンディション(もしあれば)が識別されるかの表示を含むことができる。例えば、AIモデルは、コンプレッサ速度、周囲温度、吐出温度、吸引圧力、吐出圧力、室内ファンモード、室外ファンステップなどの入力を利用して、障害分類を生成し得る。障害分類に基づき、応答して、様々な是正措置を開始することができる。本明細書で定義されるように、是正措置は、障害及び/又はいくつかの望ましくないコンディションに対処するために取られた任意の措置を指すことができる。例えば、是正措置は、メンテナンスをスケジュールすること、建物オペレータに障害を警告すること、特定のデバイス(例えば、特定のコンプレッサ)を無効にすること、特定のデバイスを動作させることなどを含み得る。このようにして、コンプレッサに影響を与える障害に迅速かつ効率的に対処することができる。
いくつかの実施形態では、AIモデルは、VRFシステム(又は他のシステム)内のモータの効率を予測するために利用される。モータ効率は、特に、モータが高レベルの非効率で運転されている場合、ある期間にわたってコストに直接影響を与える可能性がある。モータの効率が低下するにつれて、追加のリソース(例えば、電気、水など)が消費されて、所望の出力を生成することにより、コストが増加し得る。更に、モータは、所望の出力を生成するために、より集中的な動作状態で(例えば、分当たりより高い回転で)動作する必要がある結果として、より速い速度で劣化し得る。いくつかの実施形態では、モータの電流効率は、モータが最初に設置されたときの最大効率値と比較して、モータがどの程度効率的であるかのパーセンテージとして表され得る。モータ効率は、特定の変更をもたらすために入力として必要とされるリソースの量に基づいて判定され得る。例えば、コンプレッサ内の電気モータの効率は、所定量のガス(例えば、空気)を圧縮するために必要な電気の量によって定義され得る。例では、電気モータの50%の効率は、モータが最初に設置されたときの半分の効率であり、それによって、所定の量のガスを圧縮するために2倍の電力を必要とすることを示し得る。モータの効率を予測するために、AIモデルは、様々な入力(例えば、モータによって消費される電力の量、周囲温度、モータの毎分回転(RPM)値など)をモータの効率値にマッピングするように訓練され得る。
振動、障害コンディション、及びモータ効率を予測するために使用されるAIモデルが別々に説明されるが、本開示はまた、前述の予測目標のうちの1つ以上を予測する1つ以上の集計AIモデルを企図することに留意されたい。例えば、単一のAIモデルは、コンプレッサに影響を与え得る振動及び障害コンディションに関連付けられた電流を予測するように訓練され得る。本開示のこれら及び他の特徴は、以下で詳細に考察される。
HVACシステム及び建物管理システムの構築
ここで、図1~図5を参照すると、いくつかの実施形態による、本開示のシステム及び方法が実装され得る、いくつかの建物管理システム(BMS)及びHVACシステムが示される。簡単な概要では、図1は、HVACシステム100を備えた建物10を示す。図2は、建物10にサービスを提供するために使用することができるウォーターサイドシステム200のブロック図である。図3は、建物10にサービスを提供するために使用することができるエアサイドシステム300のブロック図である。図4は、建物10を監視及び制御するために使用することができるBMSのブロック図である。図5は、建物10を監視及び制御するために使用することができる別のBMSのブロック図である。
建物及びHVACシステム
特に図1を参照すると、建物10の斜視図が示される。建物10は、BMSによってサービスを提供される。BMSは、一般に、建物又は建物領域の中又はその周辺の装置を制御、監視、及び管理するように構成されたデバイスのシステムである。BMSは、例えば、HVACシステム、セキュリティシステム、照明システム、火災警報システム、建物機能又はデバイスを管理することが可能である任意の他のシステム、又はそれらの任意の組み合わせを含むことができる。
建物10にサービスを提供するBMSは、HVACシステム100を含む。HVACシステム100は、暖房、冷却、換気、又は建物10のための他のサービスを提供するように構成された複数のHVACデバイス(例えば、ヒータ、冷却器、空気処理ユニット、ポンプ、ファン、熱エネルギーストレージなど)を含むことができる。例えば、HVACシステム100は、ウォーターサイドシステム120及びエアサイドシステム130を含むことが示される。ウォーターサイドシステム120は、加熱又は冷却された流体を、エアサイドシステム130の空気処理ユニットに提供し得る。エアサイドシステム130は、加熱又は冷却された流体を使用して、建物10に提供される空気流を加熱又は冷却し得る。HVACシステム100で使用することができる例示的なウォーターサイドシステム及びエアサイドシステムは、図2~図3を参照してより詳細に説明される。
HVACシステム100は、冷却器102、ボイラ104、及び屋上空気処理ユニット(AHU)106を含むことが示されている。ウォーターサイドシステム120は、ボイラ104及び冷却器102を使用して、作動流体(例えば、水、グリコールなど)を加熱又は冷却し得、作動流体をAHU106に循環させ得る。様々な実施形態では、ウォーターサイドシステム120のHVACデバイスは、建物10(図1に示すように)内又はその周りに、又は中央プラント(例えば、冷却プラント、蒸気プラント、熱プラントなど)などのオフサイト場所に位置することができる。作動流体は、建物10で加熱又は冷却が必要かどうかに応じて、ボイラ104で加熱され得、又は冷却器102で冷却され得る。ボイラ104は、例えば、可燃性材料(例えば、天然ガス)を燃焼させることによって、又は電気加熱要素を使用することによって、循環された流体に熱を加え得る。冷却器102は、循環された流体を、熱交換器(例えば、蒸発器)内の別の流体(例えば、冷媒)との熱交換関係に配置して、循環された流体から熱を吸収し得る。冷却器102及び/又はボイラ104からの作動流体は、配管108を介してAHU106に輸送され得る。
AHU106は、作動流体を、(例えば、冷却コイル及び/又は加熱コイルの1つ以上の段階を介して)AHU106を通過する空気流と熱交換関係に配置し得る。空気流は、例えば、外部空気、建物10内からの還気、又は両方の組み合わせであり得る。AHU106は、空気流と作動流体との間で熱を伝達して、空気流の加熱又は冷却を提供し得る。例えば、AHU106は、空気流を、作動流体を含む熱交換器の上を、又はそれを通って通過させるように構成された1つ以上のファン又はブロワを含むことができる。次に、作動流体は、配管110を介して冷却器102又はボイラ104に戻り得る。
エアサイドシステム130は、AHU106によって供給された空気流(すなわち、供給空気流)を、空気供給ダクト112を介して建物10に送達し得、建物10からAHU106に空気戻りダクト114を介して還気を提供し得る。いくつかの実施形態では、エアサイドシステム130は、複数の可変空気量(VAV)ユニット116を含む。例えば、エアサイドシステム130は、建物10の各フロア又はゾーンに別個のVAVユニット116を含むように示される。VAVユニット116は、建物10の個々のゾーンに提供される供給空気流の量を制御するように動作させることができるダンパ又は他の流量制御要素を含むことができる。他の実施形態では、エアサイドシステム130は、中間VAVユニット116又は他の流量制御要素を使用せずに、供給空気流を、建物10の1つ以上のゾーンに(例えば、供給ダクト112を介して)送達する。AHU106は、供給空気流の属性を測定するように構成された様々なセンサ(例えば、温度センサ、圧力センサなど)を含むことができる。AHU106は、AHU106内及び/又は建物ゾーン内に位置するセンサから入力を受信し得、AHU106を通る供給空気流の流量、温度、又は他の属性を調節して、建物ゾーンの設定値コンディションを達成し得る。
ウォーターサイドシステム
ここで図2を参照すると、いくつかの実施形態による、ウォーターサイドシステム200のブロック図が示される。様々な実施形態では、ウォーターサイドシステム200は、HVACシステム100内のウォーターサイドシステム120を補完又は置き換え得、又はHVACシステム100とは別個に実装され得る。HVACシステム100に実装されるとき、ウォーターサイドシステム200は、HVACシステム100内のHVACデバイスのサブセット(例えば、ボイラ104、冷却器102、ポンプ、バルブなど)を含むことができ、加熱又は冷却された流体をAHU106に供給するように動作し得る。ウォーターサイドシステム200のHVACデバイスは、(例えば、ウォーターサイドシステム120の構成要素として)建物10の中に、又は中央プラントのようなオフサイト場所に位置し得る。
図2において、ウォーターサイドシステム200は、複数のサブプラント202~212を有する中央プラントとして示される。サブプラント202~212は、ヒータサブプラント202、熱回収冷却器サブプラント204、冷却器サブプラント206、冷却塔サブプラント208、高温熱エネルギーストレージ(TES)サブプラント210、及び低温熱エネルギーストレージ(TES)サブプラント212を含むことが示されている。サブプラント202~212は、建物又は構内の熱エネルギー負荷(例えば、温水、冷水、暖房、冷却など)を提供するために、ユーティリティから資源(例えば、水、天然ガス、電気など)を消費する。例えば、ヒータサブプラント202は、ヒータサブプラント202と建物10との間の温水を循環させる温水ループ214内の水を加熱するように構成することができる。冷却器サブプラント206は、冷却器サブプラント206と建物10との間の冷水を循環する冷水ループ216内の水を冷却するように構成することができる。熱回収冷却器サブプラント204は、熱を、冷水ループ216から温水ループ214に伝達して、温水のための追加の暖房及び冷水のための追加の冷却を提供するように構成することができる。凝縮器水ループ218は、冷却器サブプラント206内の冷水から熱を吸収し、冷却塔サブプラント208内で吸収された熱を排出し、又は吸収された熱を温水ループ214に伝達し得る。高温TESサブプラント210及び低温TESサブプラント212は、その後の使用のために、それぞれ、高温熱エネルギー及び低温熱エネルギーを貯蔵し得る。
温水ループ214及び冷水ループ216は、加熱及び/又は冷却された水を、建物10の屋上に位置するエアハンドラ(例えば、AHU106)に、又は建物10の個々のフロア又はゾーン(例えば、VAVユニット116)に送達し得る。エアハンドラは、水が流れる熱交換器(例えば、加熱コイル又は冷却コイル)を通って空気を押し、空気の加熱又は冷却を提供する。加熱又は冷却された空気は、建物10の個々のゾーンに送達されて、建物10の熱エネルギー負荷を提供することができる。次いで、水は、サブプラント202~212に戻って、更なる加熱又は冷却を受ける。
サブプラント202~212は、建物への循環のための加熱水及び冷却水として示され、説明されているが、熱エネルギー負荷を提供するために、水の代わりに又はそれに加えて、任意の他のタイプの作動流体(例えば、グリコール、CO2など)を使用することができることが理解される。他の実施形態では、サブプラント202~212は、中間熱伝達流体を必要とせずに、建物又は構内に直接加熱及び/又は冷却を提供し得る。これら及びウォーターサイドシステム200に対する他の変形形態は、本開示の教示内にある。
サブプラント202~212の各々は、サブプラントの機能を容易にするように構成された様々な装置を含むことができる。例えば、ヒータサブプラント202は、温水ループ214内の温水に熱を加えるように構成された複数の加熱要素220(例えば、ボイラ、電気ヒータなど)を含むように示される。ヒータサブプラント202は、温水ループ214内の温水を循環させ、かつ個々の加熱要素220を通る温水の流量を制御するように構成されたいくつかのポンプ222及び224も含むことが示されている。冷却器サブプラント206は、冷水ループ216内の冷水から熱を除去するように構成された複数の冷却器232を含むことが示されている。冷却器サブプラント206はまた、冷水ループ216内の冷水を循環させ、かつ個々の冷却器232を通る冷水の流量を制御するように構成されたいくつかのポンプ234及び236を含むことが示されている。
熱回収冷却器サブプラント204は、冷水ループ216から温水ループ214に熱を伝達するように構成された複数の熱回収熱交換器226(例えば、冷蔵回路)を含むことが示されている。熱回収冷却器サブプラント204はまた、熱回収熱交換器226を通して温水及び/又は冷水を循環させ、かつ個々の熱回収熱交換器226を通して水の流量を制御するように構成されたいくつかのポンプ228及び230を含むことが示されている。冷却塔サブプラント208は、凝縮器水ループ218内の凝縮器水から熱を除去するように構成された複数の冷却塔238を含むことが示されている。冷却塔サブプラント208はまた、凝縮器水ループ218内の凝縮器水を循環させ、かつ個々の冷却塔238を通る凝縮器水の流量を制御するように構成されたいくつかのポンプ240を含むことが示されている。
高温TESサブプラント210は、後で使用するために、温水を貯蔵するように構成された高温TESタンク242を含むことが示されている。高温TESサブプラント210はまた、高温TESタンク242への、又は高温TESタンク242からの温水の流量を制御するように構成された1つ以上のポンプ又はバルブを含み得る。低温TESサブプラント212は、後で使用するために、冷水を貯蔵するように構成された低温TESタンク244を含むことが示されている。低温TESサブプラント212はまた、低温TESタンク244への、又は低温TESタンク244からの冷水の流量を制御するように構成された1つ以上のポンプ又はバルブを含み得る。
いくつかの実施形態では、ウォーターサイドシステム200内の1つ以上のポンプ(例えば、ポンプ222、224、228、230、234、236、及び/又は240)又はウォーターサイドシステム200内のパイプラインは、それに関連付けられた隔離弁を含む。隔離弁は、ポンプと統合するか、又はポンプの上流又は下流に配置されて、ウォーターサイドシステム200内の流体の流れを制御することができる。様々な実施形態では、ウォーターサイドシステム200は、ウォーターサイドシステム200の特定の構成及びウォーターサイドシステム200によって提供される負荷の種類に基づいて、より多くの、より少ない、又は異なるタイプのデバイス及び/又はサブプラントを含むことができる。
エアサイドシステム
ここで図3を参照すると、いくつかの実施形態による、エアサイドシステム300のブロック図が示される。様々な実施形態では、エアサイドシステム300は、HVACシステム100内のエアサイドシステム130を補完又は置き換え得、又はHVACシステム100とは別個に実装され得る。HVACシステム100内に実装されるとき、エアサイドシステム300は、HVACシステム100内のHVACデバイスのサブセット(例えば、AHU106、VAVユニット116、ダクト112~114、ファン、ダンパなど)を含むことができ、建物10内又は建物10の周りに位置することができる。エアサイドシステム300は、ウォーターサイドシステム200によって提供される加熱又は冷却された流体を使用して、建物10に提供される空気流を加熱又は冷却するように動作し得る。
図3では、エアサイドシステム300は、エコノマイザタイプの空気処理ユニット(AHU)302を含むことが示されている。エコノマイザタイプのAHUは、空気処理ユニットが加熱又は冷却のために使用する外部空気及び還気の量を変化させる。例えば、AHU302は、還気ダクト308を介して建物ゾーン306から還気304を受け取り得、供給空気ダクト312を介して建物ゾーン306に供給空気310を送達し得る。いくつかの実施形態では、AHU302は、建物10の屋上に位置する(例えば、図1に示されるようなAHU106)、又はそうでなければ還気304及び外部空気314の両方を受け入れるように配置された屋上ユニットである。AHU302は、排気ダンパ316、混合ダンパ318、及び外気ダンパ320を動作させて、供給空気310を形成するために組み合わされる外部空気314及び還気304の量を制御するように構成することができる。混合ダンパ318を通過しない任意の還気304は、排気空気322として、AHU302から排気ダンパ316を通って排出され得る。
ダンパ316~320の各々は、アクチュエータによって動作させることができる。例えば、排気ダンパ316は、アクチュエータ324によって動作させることができ、混合ダンパ318は、アクチュエータ326によって動作させることができ、外気ダンパ320は、アクチュエータ328によって動作させることができる。アクチュエータ324~328は、通信リンク332を介してAHUコントローラ330と通信し得る。アクチュエータ324~328は、AHUコントローラ330から制御信号を受信し得、AHUコントローラ330にフィードバック信号を提供し得る。フィードバック信号は、例えば、電流アクチュエータ又はダンパ位置の指示、アクチュエータによって及ぼされるトルク又は力の量、診断情報(例えば、アクチュエータ324~328によって実行された診断テストの結果)、ステータス情報、試運転情報、構成設定、較正データ、及び/又はアクチュエータ324~328によって収集、記憶、又は使用され得る他のタイプの情報若しくはデータを含むことができる。AHUコントローラ330は、1つ以上の制御アルゴリズム(例えば、状態ベースのアルゴリズム、極値探索制御(ESC)アルゴリズム、比例積分(PI)制御アルゴリズム、比例積分微分(PID)制御アルゴリズム、モデル予測制御(MPC)アルゴリズム、フィードバック制御アルゴリズムなど)を使用して、アクチュエータ324~328を制御するように構成されたエコノマイザコントローラであり得る。
更に図3を参照すると、AHU302は、供給空気ダクト312内に配置された、冷却コイル334、加熱コイル336、及びファン338を含むことが示されている。ファン338は、冷却コイル334及び/又は加熱コイル336を通して供給空気310を強制的に送り、かつ供給空気310を建物ゾーン306に提供するように構成することができる。AHUコントローラ330は、通信リンク340を介してファン338と通信して、供給空気310の流量を制御し得る。いくつかの実施形態では、AHUコントローラ330は、ファン338の速度を変調することによって、供給空気310に印加される加熱又は冷却の量を制御する。
冷却コイル334は、配管342を介してウォーターサイドシステム200から(例えば、冷水ループ216から)冷却された流体を受け入れ得、配管344を介してウォーターサイドシステム200に冷却された流体を戻し得る。バルブ346は、冷却コイル334を通る冷却された流体の流量を制御するために、配管342又は配管344に沿って配置することができる。いくつかの実施形態では、冷却コイル334は、独立して(例えば、AHUコントローラ330によって、BMSコントローラ366によって、など)アクティブ及び非アクティブにされて、供給空気310に印加される冷却の量を調節することができる複数の段階の冷却コイルを含む。
加熱コイル336は、配管348を介してウォーターサイドシステム200から(例えば、温水ループ214から)加熱された流体を受け入れ得、配管350を介してウォーターサイドシステム200に加熱された流体を戻し得る。バルブ352は、加熱コイル336を通る加熱された流体の流量を制御するために、配管348又は配管350に沿って配置することができる。いくつかの実施形態では、加熱コイル336は、独立して(例えば、AHUコントローラ330によって、BMSコントローラ366によって、など)アクティブ及び非アクティブにされて、供給空気310に印加される加熱の量を調節することができる複数の段階の加熱コイルを含む。
バルブ346及び352の各々は、アクチュエータによって制御され得る。例えば、バルブ346は、アクチュエータ354によって制御され得、バルブ352は、アクチュエータ356によって制御され得る。アクチュエータ354~356は、通信リンク358~360を介してAHUコントローラ330と通信し得る。アクチュエータ354~356は、AHUコントローラ330から制御信号を受信し得、コントローラ330にフィードバック信号を提供し得る。いくつかの実施形態では、AHUコントローラ330は、供給空気ダクト312(例えば、冷却コイル334及び/又は加熱コイル336の下流)に配置された温度センサ362から、供給空気温度の測定値を受信する。AHUコントローラ330はまた、建物ゾーン306に位置する温度センサ364から、建物ゾーン306の温度の測定値を受信し得る。
いくつかの実施形態では、AHUコントローラ330は、アクチュエータ354~356を介してバルブ346及び352を動作させて、空気310に提供される加熱又は冷却の量を調節する(例えば、供給空気310に対する設定値温度を達成するか、又は供給空気310の温度を、設定値温度範囲内に維持する)。バルブ346及び352の位置は、冷却コイル334又は加熱コイル336によって供給空気310に提供される加熱又は冷却の量に影響を与え、所望の供給空気温度を達成するために消費されるエネルギーの量と相関し得る。AHU330は、コイル334~336をアクティブ若しくは非アクティブにすること、ファン338の速度を調整すること、又はその両方の組み合わせによって、供給空気310及び/又は建物ゾーン306の温度を制御し得る。
更に図3を参照すると、エアサイドシステム300は、建物管理システム(BMS)コントローラ366及びクライアントデバイス368を含むことが示されている。BMSコントローラ366は、エアサイドシステム300、ウォーターサイドシステム200、HVACシステム100、及び/又は建物10にサービスを提供する他の制御可能なシステムに対する、システムレベルコントローラ、アプリケーション若しくはデータサーバ、ヘッドノード、又はマスターコントローラとして機能する1つ以上のコンピュータシステム(例えば、サーバ、監視コントローラ、サブシステムコントローラなど)を含むことができる。BMSコントローラ366は、同様の、又は異なるプロトコル(例えば、LON、BACnetなど)に従って、通信リンク370を介して、複数の下流の建物システム又はサブシステム(例えば、HVACシステム100、セキュリティシステム、照明システム、ウォーターサイドシステム200など)と通信し得る。様々な実施形態では、AHUコントローラ330及びBMSコントローラ366は、(図3に示されるように)分離され得るか、又は統合され得る。統合された実装態様では、AHUコントローラ330は、BMSコントローラ366のプロセッサによる実行のために構成されたソフトウェアモジュールであり得る。
いくつかの実施形態では、AHUコントローラ330は、BMSコントローラ366から情報(例えば、コマンド、設定値、動作境界など)を受信し、BMSコントローラ366に情報(例えば、温度測定、バルブ又はアクチュエータ位置、動作ステータス、診断など)を提供する。例えば、AHUコントローラ330は、建物ゾーン306内の可変状態若しくはコンディションを監視若しくは制御するためにBMSコントローラ366によって使用され得る、温度センサ362~364、装置オン/オフ状態、装置動作容量、及び/又は任意の他の情報からの温度測定値を、BMSコントローラ366に提供し得る。
クライアントデバイス368は、HVACシステム100、そのサブシステム、及び/若しくはデバイスを制御する、閲覧する、若しくはそうでなければ相互作用するための1つ以上のヒューマンマシンインターフェース、又はクライアントインターフェース(例えば、グラフィカルユーザインターフェース、レポートインターフェース、テキストベースのコンピュータインターフェース、クライアント対応ウェブサービス、ウェブクライアントにページを提供するウェブサーバなど)を含むことができる。クライアントデバイス368は、コンピュータワークステーション、クライアント端末、リモート若しくはローカルインターフェース、又は任意の他のタイプのユーザインターフェースデバイスであり得る。クライアントデバイス368は、固定端末又はモバイルデバイスであり得る。例えば、クライアントデバイス368は、デスクトップコンピュータ、ユーザインターフェースを備えるコンピュータサーバ、ラップトップコンピュータ、タブレット、スマートフォン、PDA、又は任意の他のタイプのモバイルデバイス若しくは非モバイルデバイスであり得る。クライアントデバイス368は、通信リンク372を介して、BMSコントローラ366及び/又はAHUコントローラ330と通信し得る。
建物管理システム
ここで図4を参照すると、いくつかの実施形態による、建物管理システム(BMS)400のブロック図が示される。BMS400は、様々な建物機能を自動的に監視及び制御するために、建物10に実装され得る。BMS400は、BMSコントローラ366及び複数の建物サブシステム428を含むことが示される。建物サブシステム428は、建物電気サブシステム434、情報通信技術(ICT)サブシステム436、セキュリティサブシステム438、HVACサブシステム440、照明サブシステム442、リフト/エスカレータサブシステム432、及び防火安全サブシステム430を含むことが示される。様々な実施形態では、建物サブシステム428は、より少ないサブシステム、追加サブシステム、又は代替サブシステムを含むことができる。例えば、建物サブシステム428はまた、又は代替的に、冷蔵サブシステム、広告サブシステム若しくは標識サブシステム、調理サブシステム、自動販売サブシステム、プリンタ若しくはコピーサービスサブシステム、又は制御可能な装置及び/若しくはセンサを使用して、建物10を監視若しくは制御する任意の他のタイプの建物サブシステムを含み得る。いくつかの実施形態では、建物サブシステム428は、図2~図3を参照して説明された、ウォーターサイドシステム200及び/又はエアサイドシステム300を含む。
建物サブシステム428の各々は、その個々の機能及び制御活動を完了するための任意の数のデバイス、コントローラ、及び接続を含むことができる。HVACサブシステム440は、図1~図3を参照して説明された、HVACシステム100と同じ構成要素の多くを含むことができる。例えば、HVACサブシステム440は、冷却器、ボイラ、任意の数の空気処理ユニット、エコノマイザ、フィールドコントローラ、監視コントローラ、アクチュエータ、温度センサ、及び建物10内の温度、湿度、空気流、又は他の可変コンディションを制御するための他のデバイスを含むことができる。照明サブシステム442は、任意の数の照明器具、バラスト、照明センサ、調光器、又は建物空間に提供される光の量を制御可能に調整するように構成された他のデバイスを含むことができる。セキュリティサブシステム438は、占有センサ、ビデオ監視カメラ、デジタルビデオレコーダ、ビデオ処理サーバ、侵入検出デバイス、アクセス制御デバイス及びサーバ、又は他のセキュリティ関連デバイスを含むことができる。
更に図4を参照すると、BMSコントローラ366は、通信インターフェース407及びBMSインターフェース409を含むことが示される。インターフェース407は、BMSコントローラ366及び/又はサブシステム428に対するユーザ制御、監視、及び調整を可能にするために、BMSコントローラ366と外部アプリケーション(例えば、監視及び報告アプリケーション422、エンタープライズ制御アプリケーション426、リモートシステム及びアプリケーション444、クライアントデバイス448上に存在するアプリケーションなど)との間の通信を容易にし得る。インターフェース407はまた、BMSコントローラ366とクライアントデバイス448との間の通信を容易にし得る。BMSインターフェース409は、BMSコントローラ366と建物サブシステム428(例えば、HVAC、照明セキュリティ、リフト、配電、ビジネスなど)との間の通信を容易にし得る。
インターフェース407、409は、建物サブシステム428又は他の外部システム若しくはデバイスとデータ通信を行うための有線又は無線通信インターフェース(例えば、ジャック、アンテナ、伝送機、受信機、トランシーバ、有線端末など)であることができるか、又はそれを含むことができる。様々な実施形態では、インターフェース407、409を介した通信は、直接的なもの(例えば、ローカル有線又は無線通信)であり得るか、又は通信ネットワーク446(例えば、WAN、インターネット、セルラネットワークなど)を介してであり得る。例えば、インターフェース407、409は、イーサネット(登録商標)ベースの通信リンク又はネットワークを介して、データを送信及び受信するためのイーサネットカード及びポートを含むことができる。別の例では、インターフェース407、409は、無線通信ネットワークを介して通信するためのWi-Fiトランシーバを含むことができる。別の例では、インターフェース407、409のうちの一方又は両方は、セルラフォン通信トランシーバ又はモバイルフォン通信トランシーバを含むことができる。一実施形態では、通信インターフェース407は、電源配管通信インターフェースであり、BMSインターフェース409は、イーサネットインターフェースである。他の実施形態では、通信インターフェース407及びBMSインターフェース409の両方は、イーサネットインターフェースであるか、又は同じイーサネットインターフェースである。
更に図4を参照すると、BMSコントローラ366は、プロセッサ406及びメモリ408を含む処理回路404を含むことが示される。処理回路404及びその様々な構成要素が、インターフェース407、409を介してデータを送信及び受信することができるように、処理回路404は、BMSインターフェース409及び/又は通信インターフェース407に通信可能に接続され得る。プロセッサ406は、汎用プロセッサ、特定用途向け統合回路(ASIC)、1つ以上のフィールドプログラマブルゲートアレイ(FPGA)、処理構成要素のグループ、又は他の好適な電子処理構成要素として実装され得る。
メモリ408(例えば、メモリ、メモリユニット、記憶デバイスなど)は、本出願に記載される様々なプロセス、層、及びモジュールを完了又は容易にするためのデータ及び/又はコンピュータコードを記憶するための1つ以上のデバイス(例えば、RAM、ROM、フラッシュメモリ、ハードディスク記憶装置など)を含むことができる。メモリ408は、揮発性メモリ又は不揮発性メモリであり得るか、又はそれを含むことができる。メモリ408は、データベース構成要素、オブジェクトコード構成要素、スクリプト構成要素、又は本出願に記載される様々な活動及び情報構造をサポートするための任意の他のタイプの情報構造を含むことができる。いくつかの実施形態によれば、メモリ408は、処理回路404を介してプロセッサ406に通信可能に接続され、本明細書に記載される1つ以上のプロセスを(例えば、処理回路404及び/又はプロセッサ406によって)実行するためのコンピュータコードを含む。
いくつかの実施形態では、BMSコントローラ366は、単一のコンピュータ(例えば、1つのサーバ、1つのハウジングなど)内に実装される。様々な他の実施形態では、BMSコントローラ366は、複数のサーバ又はコンピュータ(例えば、分散された場所に存在し得る)にわたって分散され得る。更に、図4は、BMSコントローラ366の外部に存在するアプリケーション422及び426を示すが、いくつかの実施形態では、アプリケーション422及び426は、BMSコントローラ366内(例えば、メモリ408内)にホストされ得る。
更に図4を参照すると、メモリ408は、エンタープライズ統合層410、自動測定及び検証(AM&V)層412、需要応答(DR)層414、障害検出及び診断(FDD)層416、統合制御層418、並びに後の建物サブシステム統合420を含むことが示される。層410~420は、建物サブシステム428及び他のデータソースから入力を受信し、入力に基づいて、建物サブシステム428に対する最適な制御アクションを決定し、最適な制御アクションに基づいて、制御信号を生成し、生成された制御信号を、建物サブシステム428に提供するように構成され得る。以下の段落は、BMS400内の層410~420の各々によって実行される一般的な機能のうちのいくつかを説明する。
エンタープライズ統合層410は、様々なエンタープライズレベルのアプリケーションをサポートするための情報及びサービスを、クライアント又はローカルアプリケーションに提供するように構成することができる。例えば、エンタープライズ制御アプリケーション426は、サブシステムスパニング制御を、グラフィカルユーザインターフェース(GUI)又は任意の数のエンタープライズレベルのビジネスアプリケーション(例えば、会計システム、ユーザ識別システムなど)に提供するように構成され得る。エンタープライズ制御アプリケーション426はまた、又は代替的に、BMSコントローラ366を構成するための構成GUIを提供するように構成され得る。更に他の実施形態では、エンタープライズ制御アプリケーション426は、インターフェース407及び/又はBMSインターフェース409で受信される入力に基づいて、層410~420と動作して、建物性能(例えば、効率、エネルギー使用、快適性、又は安全性)を最適化することができる。
建物サブシステム統合層420は、BMSコントローラ366と建物サブシステム428との間の通信を管理するように構成することができる。例えば、建物サブシステム統合層420は、建物サブシステム428からセンサデータ及び入力信号を受信し、出力データ及び制御信号を、建物サブシステム428に提供し得る。建物サブシステム統合層420はまた、建物サブシステム428間の通信を管理するように構成され得る。建物サブシステム統合層420は、複数のマルチベンダ/マルチプロトコルシステムにわたる通信(例えば、センサデータ、入力信号、出力信号など)を変換する。
需要応答層414は、建物10の需要を満たすことに応答して、資源使用(例えば、電気使用、天然ガス使用、水使用など)及び/又はそのような資源使用の金銭的コストを最適化するように構成することができる。最適化は、使用時間価格、抑制信号、エネルギー可用性、又はユーティリティプロバイダ、分散型エネルギー生成システム424、エネルギーストレージ427(例えば、高温TES242、低温TES244など)、若しくは他のソースから受信される他のデータに基づき得る。需要応答層414は、BMSコントローラ366の他の層(例えば、建物サブシステム統合層420、統合制御層418など)から入力を受信し得る。他の層から受信される入力は、温度、二酸化炭素レベル、相対湿度レベル、空気品質センサ出力、占有センサ出力、ルームスケジュールなどの環境又はセンサ入力を含むことができる。入力はまた、電気使用(例えば、kWhで表される)、熱負荷測定値、価格情報、予測された価格設定、平滑化された価格設定、ユーティリティからの抑制信号などのような入力を含み得る。
いくつかの実施形態によれば、需要応答層414は、データ及びそれが受信する信号に応答するための制御ロジックを含む。これらの応答は、統合制御層418内の制御アルゴリズムと通信すること、制御戦略を変更すること、設定値を変更すること、又は制御された方法で建物装置又はサブシステムをアクティブ/非アクティブにすることを含むことができる。需要応答層414はまた、記憶されたエネルギーをいつ利用するかを決定するように構成された制御ロジックを含み得る。例えば、需要応答層414は、ピーク使用時間の開始の直前に、エネルギーストレージ427からのエネルギーを使用することを開始すると判定し得る。
いくつかの実施形態では、需要応答層414は、需要(例えば、価格、抑制信号、需要レベルなど)を表す1つ以上の入力に基づいて、又はそれに基づいて、エネルギーコストを最小限に抑える制御アクションを能動的に開始する(例えば、自動的に設定値を変更する)ように構成された制御モジュールを含む。いくつかの実施形態では、需要応答層414は、装置モデルを使用して、制御アクションの最適セットを判定する。装置モデルは、例えば、様々なセットの建物装置によって実行される入力、出力、及び/又は機能を説明する熱力学モデルを含むことができる。装置モデルは、建物装置の集合体(例えば、サブプラント、冷却器アレイなど)又は個々のデバイス(例えば、個々の冷却器、ヒータ、ポンプなど)を表し得る。
需要応答層414は、1つ以上の需要応答ポリシー定義(例えば、データベース、XMLファイルなど)を更に含み得るか、又はそれを利用し得る。ポリシー定義は、需要入力に応答して開始される制御アクションが、ユーザのアプリケーション、所望の快適性レベル、特定の建物装置に合わせて、又は他の懸念に基づいて調整され得るように、ユーザによって(例えば、グラフィカルユーザインターフェースを介して)編集又は調整され得る。例えば、需要応答ポリシー定義は、特定の需要入力に応答して、どの装置をオン又はオフにすることができるか、1つのシステム又は装置をどのくらいの期間オフにするべきか、どのような設定値を変更することができるか、どのような許容される設定値調整範囲であるか、通常スケジュールされた設定値に戻る前に、どのくらいの時間、高い需要設定値を保持するか、どのくらいの容量制限に近づくか、どの装置モードを利用するか、エネルギーストレージデバイス(例えば、蓄熱タンク、バッテリーバンクなど)への、及びエネルギーストレージデバイスからのエネルギー伝達率(例えば、最大レート、アラームレート、他のレート境界情報など)、及びエネルギーのオンサイト生成をいつディスパッチするか(例えば、燃料電池、モータジェネレータセットなどを介して)を指定することができる。
統合制御層418は、建物サブシステム統合層420及び/又は後の需要応答414のデータ入力又は出力を使用して、制御決定を行うように構成することができる。建物サブシステム統合層420によって提供されるサブシステム統合により、統合制御層418は、サブシステム428が、単一の統合されたスーパーシステムとして動作するように、サブシステム428の制御活動を統合することができる。いくつかの実施形態では、統合制御層418は、複数の建物サブシステムからの入力及び出力を使用して、別個のサブシステムが単独で提供することができる快適さ及びエネルギー節約と比較して、より大きな快適さ及びエネルギー節約を提供する制御ロジックを含む。例えば、統合制御層418は、第1のサブシステムからの入力を使用して、第2のサブシステムに対するエネルギー節約制御決定を行うように構成することができる。これらの決定の結果は、建物サブシステム統合層420に戻って伝達することができる。
統合制御層418は、需要応答層414の論理的に下にあることが示される。統合制御層418は、建物サブシステム428及びそれらのそれぞれの制御ループが、需要応答層414と協調して制御されることを可能にすることによって、需要応答層414の有効性を強化するように構成することができる。この構成は、従来のシステムと比較して、破壊的な需要応答挙動を有利に低減し得る。例えば、統合制御層418は、冷却された水温(又は温度に直接的又は間接的に影響を与える別の構成要素)の設定値に対する需要応答、すなわち駆動上方調整が、冷却器で節約されたよりも大きな建物の総エネルギー使用量をもたらすファンエネルギー(又は空間を冷却するために使用される他のエネルギー)の増加をもたらさないことを保証するように構成され得る。
統合制御層418は、需要応答層414が、要求された負荷制限が進行中であっても、制約(例えば、温度、照明レベルなど)が適切に維持されていることを確認するように、需要応答層414にフィードバックを提供するように構成することができる。制約はまた、安全性、装置動作制限及び性能、快適性、火災コード、電気コード、エネルギーコードなどに関連する設定値又は感知された限度を含み得る。統合制御層418はまた、障害検出及び診断層416、並びに自動測定及び検証層412の論理的に下にある。統合制御層418は、2つ以上の建物サブシステムからの出力に基づいて、計算された入力(例えば、集計)をこれらのより高いレベルに提供するように構成することができる。
自動測定及び検証(AM&V)層412は、統合制御層418又は需要応答層414によって命令される制御戦略が、適切に動作していることを(例えば、AM&V層412、統合制御層418、建物サブシステム統合層420、FDD層416、又はそれ以外によって集約されたデータを使用して)検証するように構成することができる。AM&V層412によって行われる計算は、個々のBMSデバイス又はサブシステムに対する建物システムエネルギーモデル及び/又は装置モデルに基づくことができる。例えば、AM&V層412は、モデル予測出力を建物サブシステム428からの実際の出力と比較して、モデルの精度を判定し得る。
障害検出及び診断(FDD)層416は、建物サブシステム428、建物サブシステムデバイス(すなわち、建物装置)、並びに需要応答層414及び統合制御層418によって使用される制御アルゴリズムに対する継続的な障害検出を提供するように構成することができる。FDD層416は、統合制御層418から、1つ以上の建物サブシステム若しくはデバイスから、又は別のデータソースから直接、データ入力を受信し得る。FDD層416は、検出された障害を自動的に診断し、それに応答し得る。検出又は診断された障害に対する応答は、ユーザに、警告メッセージ、メンテナンススケジューリングシステム、又は障害を修復しようと試みるか、若しくは障害を回避するように構成された制御アルゴリズムを提供することを含むことができる。
FDD層416は、建物サブシステム統合層420で利用可能な詳細なサブシステム入力を使用して、障害のある構成要素又は障害の原因(例えば、緩いダンパ連動)の特定の識別を出力するように構成することができる。他の例示的な実施形態では、FDD層416は、受信した障害イベントに応答して、制御戦略及びポリシーを実行する統合制御層418に、「障害」イベントを提供するように構成されている。いくつかの実施形態によれば、FDD層416(又は統合された制御エンジン若しくはビジネスルールエンジンによって実行されるポリシー)は、障害のあるデバイス又はシステムの周りのシステム又は直接制御活動をシャットダウンして、エネルギー廃棄物を削減し、装置の寿命を延長し、又は適切な制御応答を確保し得る。
FDD層416は、様々な異なるシステムデータストア(又は生のデータのためのデータポイント)を保存又はそれにアクセスするように構成することができる。FDD層416は、データストアのいくつかのコンテンツを使用して、装置レベルの障害(例えば、特定の冷却器、特定のAHU、特定の端末ユニットなど)を識別し、他のコンテンツを使用して、構成要素又はサブシステムレベルの障害を識別し得る。例えば、建物サブシステム428は、BMS400及びその様々な構成要素の性能を示す時間的(すなわち、時系列)データを生成し得る。建物サブシステム428によって生成されたデータは、統計的特徴を示し、かつ対応するシステム又はプロセス(例えば、温度制御プロセス、フロー制御プロセスなど)が、その設定値からの誤差に関してどのように実行されているかに関する情報を提供する測定値又は計算値を含むことができる。これらのプロセスは、FDD層416によって検査されて、システムが性能の劣化を開始するときに露出し、障害がより深刻になる前に障害を修復するようにユーザに警告することができる。
ここで図5を参照すると、いくつかの実施形態による、別の建物管理システム(BMS)500のブロック図が示される。BMS500は、HVACシステム100、ウォーターサイドシステム200、エアサイドシステム300、建物サブシステム428、並びに他のタイプのBMSデバイス(例えば、照明装置、セキュリティ装置など)及び/又はHVAC装置のデバイスを監視及び制御するために使用することができる。
BMS500は、自動装置発見及び装置モデル分配を容易にするシステムアーキテクチャを提供する。装置発見は、複数の異なる通信バス(例えば、システムバス554、ゾーンバス556~560、及び564、センサ/アクチュエータバス566など)にわたって、及び複数の異なる通信プロトコルにわたって、複数のレベルのBMS500上で発生することができる。いくつかの実施形態では、装置発見は、各通信バスに接続されたデバイスに対するステータス情報を提供するアクティブノードテーブルを使用して達成される。例えば、各通信バスは、新しいノードに対する対応するアクティブノードテーブルを監視することによって、新しいデバイスに対して監視され得る。新しいデバイスが検出されると、BMS500は、ユーザインタラクションなしで、新しいデバイスとのインタラクション(例えば、デバイスからのデータを使用して制御信号を送信すること)を開始することができる。
BMS500のいくつかのデバイスは、装置モデルを使用して、ネットワークに表示される。装置モデルは、他のシステムとの統合に使用される装置オブジェクト属性、ビュー定義、スケジュール、傾向、及び関連するBACnet値オブジェクト(例えば、アナログ値、バイナリ値、マルチステート値など)を定義する。BMS500のいくつかのデバイスには、独自の装置モデルが記憶されている。BMS500の他のデバイスは、外部(例えば、他のデバイス内)に記憶される装置モデルを有する。例えば、ゾーンコーディネータ508は、バイパスダンパ528に対する装置モデルを記憶することができる。いくつかの実施形態では、ゾーンコーディネータ508は、ゾーンバス558上のバイパスダンパ528又は他のデバイスに対する装置モデルを自動的に作成する。他のゾーンコーディネータはまた、ゾーンバスに接続されたデバイスに対する装置モデルを作成することもできる。デバイスに対する装置モデルは、デバイスがゾーンバス上で公開するデータポイントのタイプ、デバイスタイプ、及び/又は他のデバイス属性に基づいて、自動的に作成することができる。自動装置発見及び装置モデル分配のいくつかの例を以下でより詳細に説明する。
更に図5を参照すると、BMS500は、システムマネージャ502と、いくつかのゾーンコーディネータ506、508、510、及び518と、いくつかのゾーンコントローラ524、530、532、536、548、及び550とを含むことが示されている。システムマネージャ502は、BMS500内のデータポイントを監視し、監視された変数を様々な監視及び/又は制御アプリケーションに報告することができる。システムマネージャ502は、データ通信リンク574(例えば、BACnet IP、イーサネット、有線又は無線通信など)を介して、クライアントデバイス504(例えば、ユーザデバイス、デスクトップコンピュータ、ラップトップコンピュータ、モバイルデバイスなど)と通信することができる。システムマネージャ502は、データ通信リンク574を介して、クライアントデバイス504にユーザインターフェースを提供することができる。ユーザインターフェースは、ユーザが、クライアントデバイス504を介して、BMS500を監視及び/又は制御することを可能にし得る。
いくつかの実施形態では、システムマネージャ502は、システムバス554を介して、ゾーンコーディネータ506~510及び518と接続される。システムマネージャ502は、マスタースレーブトークンパッシング(MSTP)プロトコル又は任意の他の通信プロトコルを使用して、システムバス554を介して、ゾーンコーディネータ506~510及び518と通信するように構成することができる。システムバス554はまた、システムマネージャ502を、定容量(CV)屋上ユニット(RTU)512、入力/出力モジュール(IOM)514、サーモスタットコントローラ516(例えば、TEC5000シリーズサーモスタットコントローラ)、及びネットワーク自動化エンジン(NAE)又はサードパーティコントローラ520などの他のデバイスと接続することができる。RTU512は、システムマネージャ502と直接通信するように構成することができ、システムバス554に直接接続することができる。他のRTUは、中間デバイスを介して、システムマネージャ502と通信することができる。例えば、有線入力562は、サードパーティRTU542を、システムバス554に接続するサーモスタットコントローラ516に接続することができる。
システムマネージャ502は、装置モデルを含む任意のデバイスのためのユーザインターフェースを提供することができる。ゾーンコーディネータ506~510及び518並びにサーモスタットコントローラ516などのデバイスは、それらの装置モデルを、システムバス554を介して、システムマネージャ502に提供することができる。いくつかの実施形態では、システムマネージャ502は、装置モデル(例えば、IOM514、サードパーティコントローラ520など)を含まない接続されたデバイスに対する装置モデルを自動的に作成する。例えば、システムマネージャ502は、デバイスツリー要求に応答する任意のデバイスに対する装置モデルを作成することができる。システムマネージャ502によって作成された装置モデルは、システムマネージャ502内に記憶され得る。次いで、システムマネージャ502は、システムマネージャ502によって作成された装置モデルを使用して、独自の装置モデルを含まないデバイスに対するユーザインターフェースを提供することができる。いくつかの実施形態では、システムマネージャ502は、システムバス554を介して接続された装置の各タイプに対するビュー定義を記憶し、記憶されたビュー定義を使用して、装置に対するユーザインターフェースを生成する。
各ゾーンコーディネータ506~510及び518は、ゾーンバス556、558、560、及び564を介して、ゾーンコントローラ524、530~532、536、及び548~550のうちの1つ以上と接続することができる。ゾーンコーディネータ506~510及び518は、MSTPプロトコル又は任意の他の通信プロトコルを使用して、ゾーンバス556~560及び564を介して、ゾーンコントローラ524、530~532、536、及び548~550と通信することができる。ゾーンバス556~560及び564はまた、ゾーンコーディネータ506~510及び518を、可変空気量(VAV)RTU522及び540、切り替えバイパス(COBP)RTU526及び552、バイパスダンパ528及び546、並びにPEAKコントローラ534及び544などの他のタイプのデバイスと接続することができる。
ゾーンコーディネータ506~510及び518は、様々なゾーニングシステムを監視及び指令するように構成することができる。いくつかの実施形態では、各ゾーンコーディネータ506~510及び518は、別個のゾーニングシステムを監視及び指令し、別個のゾーンバスを介して、ゾーニングシステムに接続される。例えば、ゾーンコーディネータ506は、ゾーンバス556を介して、VAV RTU522及びゾーンコントローラ524に接続することができる。ゾーンコーディネータ508は、ゾーンバス558を介して、COBP RTU526、バイパスダンパ528、COBPゾーンコントローラ530、及びVAVゾーンコントローラ532に接続することができる。ゾーンコーディネータ510は、ゾーンバス560を介して、PEAKコントローラ534及びVAVゾーンコントローラ536に接続することができる。ゾーンコーディネータ518は、ゾーンバス564を介して、PEAKコントローラ544、バイパスダンパ546、COBPゾーンコントローラ548、及びVAVゾーンコントローラ550に接続することができる。
ゾーンコーディネータ506~510及び518の単一のモデルは、複数の異なるタイプのゾーニングシステム(例えば、VAVゾーニングシステム、COBPゾーニングシステムなど)を扱うように構成することができる。各ゾーニングシステムは、RTU、1つ以上のゾーンコントローラ、及び/又はバイパスダンパを含むことができる。例えば、ゾーンコーディネータ506及び510は、それぞれ、VAV RTU522及び540に接続されたVerasys VAVエンジン(VVE)として示される。ゾーンコーディネータ506は、ゾーンバス556を介して、VAV RTU522に直接接続され、ゾーンコーディネータ510は、PEAKコントローラ534に提供される有線入力568を介してサードパーティVAV RTU540に接続される。ゾーンコーディネータ508及び518は、それぞれ、COBP RTU526及び552に接続されたVerasys COBPエンジン(VCE)として示される。ゾーンコーディネータ508は、ゾーンバス558を介して、COBP RTU526に直接接続されるが、ゾーンコーディネータ518は、PEAKコントローラ544に提供される有線入力570を介して、サードパーティCOBP RTU552に接続される。
ゾーンコントローラ524、530~532、536、及び548~550は、センサ/アクチュエータ(SA)バスを介して、個々のBMSデバイス(例えば、センサ、アクチュエータなど)と通信することができる。例えば、VAVゾーンコントローラ536は、SAバス566を介して、ネットワーク化されたセンサ538に接続されるように示される。ゾーンコントローラ536は、MSTPプロトコル又は任意の他の通信プロトコルを使用して、ネットワーク化されたセンサ538と通信することができる。図5には1つのSAバス566のみが示されているが、各ゾーンコントローラ524、530~532、536、及び548~550が、異なるSAバスに接続され得ることを理解されたい。各SAバスは、ゾーンコントローラを、様々なセンサ(例えば、温度センサ、湿度センサ、圧力センサ、光センサ、占有センサなど)、アクチュエータ(例えば、ダンパアクチュエータ、バルブアクチュエータなど)、及び/又は他のタイプの制御可能な装置(例えば、冷却器、ヒータ、ファン、ポンプなど)と接続することができる。
各ゾーンコントローラ524、530~532、536、及び548~550は、異なる建物ゾーンを監視及び制御するように構成することができる。ゾーンコントローラ524、530~532、536、及び548~550は、それらのSAバスを介して提供される入力及び出力を使用して、様々な建物ゾーンを監視及び制御することができる。例えば、ゾーンコントローラ536は、SAバス566を介して、ネットワーク化されたセンサ538から受信された温度入力(例えば、建物ゾーンの測定された温度)を、温度制御アルゴリズム内のフィードバックとして使用することができる。ゾーンコントローラ524、530~532、536、及び548~550は、様々なタイプの制御アルゴリズム(例えば、状態ベースのアルゴリズム、極値探索制御(ESC)アルゴリズム、比例積分(PI)制御アルゴリズム、比例積分微分(PID)制御アルゴリズム、モデル予測制御(MPC)アルゴリズム、フィードバック制御アルゴリズムなど)を使用して、建物10内又は建物10の周りの可変状態又はコンディション(例えば、温度、湿度、空気流、照明など)を制御することができる。
可変冷媒流システム
ここで図6A~図6Bを参照すると、いくつかの実施形態による、可変冷媒流(VRF)システム600が示される。VRFシステム600は、複数の室外VRFユニット602及び複数の室内VRFユニット604を含むことが示されている。室外VRFユニット602は、建物の外側に位置することができ、冷媒を加熱又は冷却するように動作することができる。室外VRFユニット602は、電気を消費して、冷媒を、液相、気相、及び/又は過熱気相間で変換することができる。室内VRFユニット604は、建物内の様々な建物ゾーン全体に分散することができ、室外VRFユニット602から、加熱又は冷却された冷媒を受け取ることができる。各室内VRFユニット604は、室内VRFユニットが位置する特定の建物ゾーンに対する温度制御を提供することができる。
VRFシステムの主な利点は、いくつかの室内VRFユニット604が、冷却モードで動作することができ、他の室内VRFユニット604が、加熱モードで動作することができることである。例えば、室外VRFユニット602及び室内VRFユニット604の各々は、加熱モード、冷却モード、又はオフモードで動作することができる。各建物ゾーンは、独立して制御することができ、異なる温度設定値を有することができる。いくつかの実施形態では、各建物は、建物の外側(例えば、屋上)に位置する最大3個の室外VRFユニット602、及び建物全体(例えば、様々な建物ゾーン)に分散された最大128個の室内VRFユニット604を有する。
VRFシステム600に対して、多くの異なる構成が存在する。いくつかの実施形態では、VRFシステム600は、各室外VRFユニット602が、単一の冷媒戻り配管及び単一の冷媒出口配管に接続する2パイプシステムである。2パイプシステムでは、加熱又は冷却された冷媒のうちの1つのみが、単一の冷媒出口配管を介して提供され得るため、室外VRFユニット602の全てが同じモードで動作する。他の実施形態では、VRFシステム600は、各室外VRFユニット602が、冷媒戻り配管、高温冷媒出口配管、及び低温冷媒出口配管に接続する3パイプシステムである。3パイプシステムにおいて、加熱及び冷却の両方は、二重の冷媒出口配管を介して同時に提供され得る。
VRFシステム600は、構成要素(例えば、室外VRFユニット602、室内VRFユニット604など)が正しく動作していることを確実にするために、AIを利用して、オイル量及び粘度を予測し得るVRFシステムの例を表すことができる。具体的には、構成要素は、構成要素の急速な劣化が回避されることを確実にするために、適切な潤滑のためのオイルを必要とし得る。具体的には、VRFシステム600は、図7~図10を通して説明されるシステム及び方法を活用して、全ての構成要素が、十分なオイルの供給を有し、提供されるオイルが、適切な粘度であることを確実にし得る。
ここで図7Aを参照すると、いくつかの実施形態による、VRFシステム700の例示が示される。いくつかの実施形態では、VRFシステム700は、図6A及び図6Bを参照して説明されたVRFシステム600に類似する、及び/又は同じである。より具体的には、VRFシステム700は、VRFシステムにおいてオイルがどのように利用されるかを例示することができる。VRFシステム700は、単に、VRFシステムがどのように動作し得るかの例のために示されることに留意されたい。VRFシステム700の構成要素、関係、及び/又は他の特徴は、特定の実装態様に基づいてカスタマイズ及び構成することができる。例えば、VRFシステム700は、図7Aに示されるよりも多い又は少ないコンプレッサ701を含み得る。
VRFシステム700は、コンプレッサ701、熱交換器702、ダブルチューブ型熱交換器703、オイルセパレータ704、及びアキュムレータ705を含むことが示されている。適切に動作するために、コンプレッサ701の構成要素が適切に潤滑されることを確実にするために、コンプレッサ701はオイルを必要とし得る。オイルなしでは、構成要素は、急速に劣化し得、コンプレッサ701は、ゾーンに適切な冷却/加熱を提供することができない場合がある。熱交換器702及び703は、流体(例えば、オイル及び冷媒)間で熱を伝達することができる。オイルセパレータ704は、VRFシステム700内の冷媒及び/又は他の流体からオイルを分離することができる。具体的には、動作中に、コンプレッサ701は、漏れ得る、及び/又はそうでなければ、いくつかのオイルが、コンプレッサ701によって出力された冷媒に混合されることを可能にし得る。当該オイルが、オイル/冷媒混合物から逆抽出されない場合、オイルは、VRFシステム700内のオイルの急速な損失をもたらし得るVRFシステム700を超える構成要素(例えば、室内AHU)に提供され得る。したがって、オイルセパレータ704は、オイルを流体混合物から蒸留し、一時的に保管するためにアキュムレータ705にオイルを提供することができる。アキュムレータ705は、オイルを保管することができ、VRFシステム700の他の構成要素のためのオイルを回収するために、必要に応じてアクセスすることができる。
VRFシステム700はまた、ストレーナ706、ディストリビュータ707、逆転弁708、キャピラリーチューブ709、及びマイクロコンピュータ制御膨張弁710を含むことが示されている。ストレーナ706は、VRFシステム700の動作中に、オイル及び/又はオイル/冷媒混合物と偶発的に統合され得る不純物(例えば、汚れ、破片など)を、オイル及び/又はオイル/冷媒混合物から除去することができる。不純物は、建物装置の機能不良をもたらす可能性があり、(例えば、オイルの粘度を増加又は減少させることによって)VRFシステム700内のオイルの特性に影響を与え得る。ディストリビュータ707は、熱交換器702全体に流体を分配することを支援することができる。逆転弁708は、VRFシステム700内の冷媒流の方向を変更して、加熱モードと冷却モードとの間でVRFシステム700を切り替えることができる。キャピラリーチューブ709は、冷媒の圧力に影響を与えることによって、VRFシステム700内の冷媒の温度を低下させることを支援することができる。マイクロコンピュータ制御膨張弁710は、VRFシステム700の構成要素に入る冷媒の量を調節することができる。
VRFシステム700はまた、逆止弁711、電磁弁712、チェックジョイント713、液体配管用の停止弁714、ガス(低温)配管用の停止弁715、ガス(高温/低温)配管用の停止弁716、冷媒圧力センサ717、別の冷媒圧力センサ718、及び高圧スイッチ719を含むことが示されている。逆止弁711は、流体が所望の流れ方向と反対の方向に流れることを制限することによって、流体が、VRFシステム700内で正しい方向に流れていることを確実にするのに役立つことができる。電磁弁712は、VRFシステム700内の流体の流れを調節することができる。チェックジョイント713は、VRFシステム700の構成要素の応力を調節するのに役立つことができる。停止弁714、715、及び716は、それぞれ、図7Aの例示に示される液体配管、ガス(低温)配管、及びガス(高温/低温)配管内の流体の流れを制限することができる。冷媒圧力センサ717及び718に関して、冷媒圧力センサ717は、高圧センサであり得るが、冷媒圧力センサ718は、VRFシステム700内の低圧センサであり得る。冷媒がコンプレッサ701に戻ると、高圧スイッチ719は、コンプレッサ701への損傷を防止するために、冷媒の圧力が高すぎるか、又は低すぎる場合、冷媒が、コンプレッサ701に入るのを停止することができる。
VRFシステム700はまた、様々なサーミスタを含むことが示されている。VRFシステム700では、サーミスタにわたる抵抗は、主に、接続された構成要素の温度に基づくことができる。図7Aの例示では、VRFシステム700は、サーミスタ720~725を含むことが示されている。サーミスタ720は、第1のコンプレッサ701の上側に関連付けられている。サーミスタ721は、第2のコンプレッサ701の上側に関連付けられている。サーミスタ722は、熱交換器702のガス側に関連付けられる。サーミスタ723は、熱交換器702の液体側に関連付けられている。サーミスタ724は、サブクーラバイパス側に関連付けられている。サーミスタ725は、冷媒の自動充填に関連付けられている。
VRFシステム700内の各パイプにはまた、対応する外径OD及び厚さTがラベル付けされており、これは、以下の
表1に示される。留意すべきこととして、全ての配管にわたってVRFシステム700で使用される材料は、C1220T-Oである。
ここで図7Bを参照すると、いくつかの実施形態による、VRFシステム750の例示が示される。いくつかの実施形態では、VRFシステム750は、図7を参照して説明されたVRFシステム700、及び/又は図6A及び図6Bを参照して説明されたVRFシステム600に類似する及び/又は同じである。具体的には、VRFシステム750は、VRFシステム全体のオイルの流れを例示する。VRFシステム700と同様に、VRFシステム750は、単に例のために提供される。VRFシステム750の構成要素、構造、及び/又は他の特性は、実装態様に応じて、カスタマイズ及び構成することができる。
VRFシステム750は、吸引配管752を含むことが示されている。吸引配管752は、1つ以上のデバイス/システム(例えば、室内AHU)によって使用される冷媒(例えば、冷媒蒸気)をコンプレッサ754に提供することができる。いくつかの実施形態では、いくつかのオイルは、吸引配管752によってコンプレッサ754に提供される流体に含まれ得る。受け取った冷媒に基づいて、コンプレッサ754は、冷媒を、より高い圧力ガスに圧縮し、吐出配管756を介して、当該より高い圧力ガスを出力するように動作することができる。コンプレッサ754が、適切に機能するためにオイルを必要とし得るので、コンプレッサ754によって実行される圧縮プロセスは、出力された高圧ガスに混合されるいくつかのオイルをもたらし得、それによってオイル/冷媒混合物をもたらし得る。
VRFシステム750はまた、オイルセパレータ758を含むことが示される。受け取ったオイル/冷媒混合物に基づいて、オイルセパレータ758は、オイルを、冷媒から分離するように動作することができる。分離後、冷媒は、冷媒管762を介して、いくつかのデバイス/システム(例えば、室内AHU)に提供することができる。分離されたオイルは、オイル管764を介してアキュムレータ760に提供することができる。アキュムレータ760は、オイルセパレータ758によって分離されたオイルの貯蔵容器として機能することができる。アキュムレータ760は、アキュムレータ760に貯蔵することができるオイルの最大量を画定するいくつかの最大容量を有し得る。
アキュムレータ760によって貯蔵されたオイルは、オイル戻り管766を介して、コンプレッサ754に戻すことができる。アキュムレータ760がいくらかの非ゼロ量の貯蔵オイルを有することを考えると、アキュムレータ760は、特定のコンプレッサ754が、より多くのオイルを必要とする場合、コンプレッサ754のいずれかにオイルを提供することができる。いくつかの実施形態では、VRFシステム750は、コンプレッサ754へのオイルの流れを調節するバルブ768を含む。この場合、バルブ768は、過剰なオイルがコンプレッサ754に提供されることを防止し得、及び/又はそうでなければ、コンプレッサ754に提供されるオイルを調節し得る。
いくつかの実施形態では、VRFシステム750内のオイルの粘度、並びにコンプレッサ754及びアキュムレータ760の各々内のオイル量は、AIモデルによって推定/予測される。この場合、AIモデルは、コンプレッサ754の動作速度、VRFシステム750の近傍の周囲温度、吐出配管756の吐出温度及び吐出圧力、吸引配管752の吸引圧力、冷媒蒸気の温度、及び/又はVRFシステム750内の他のガスの温度などの入力を取り込み得る。当該入力は、VRFシステム750全体でセンサ(例えば、温度センサ、圧力センサなど)によって測定され得、及び/又はVRFシステム750の構成要素によって直接提供され得る(例えば、コンプレッサ754は、それらの動作速度を直接出力し得る)。
入力に基づいて、AIモデルは、VRFシステム750内のオイルの特性(例えば、オイル量、オイル粘度など)を予測し得る。オイルの特性が、事前定義された閾値(又はいくつかの他の制約)を満たしていない場合、1つ以上の是正措置を開始して、事前定義された閾値を満たすように、オイルの特性の不足に対処し得る。例えば、VRFシステム750内のオイルの粘度が高すぎるか、又は低すぎる場合、是正措置は、VRFシステム750に新規のオイルを導入すること、及び/又は特定の時間にVRFシステム750内のオイルを完全に交換することを含み得る。別の例として、特定のコンプレッサ754内のオイル量が低すぎる場合、是正手段が開始されて、特定のコンプレッサ754が、VRFシステム750の効率への比較的低い影響をもたらす特定の時間に、アキュムレータ760から、より多くのオイルを取得することができるように、特定のコンプレッサ754、特定のバルブ768、及び/又はアキュムレータ760を動作させ得る。開始することができるAIモデル及び是正措置は、図8~図10を参照して以下でより詳細に説明する。
オイル量及び粘度推定のためのシステム及び方法
概して図8~図10を参照すると、いくつかの実施形態による、VRFシステム内のオイルの特性を推定及び予測するためのシステム及び方法が示され、説明される。以下の説明は、例示のためだけにVRFシステムを参照して説明されており、限定的であると見なされるべきではないことを理解されたい。図8~図10を通して説明されるシステム及び方法は、同様に、オイルを利用する様々なシステム(例えば、他の建物システム、車両システムなど)に適用することができ、VRFシステムに限定されることを意味しない。
以下に説明されるシステム及び方法は、人工知能(AI)モデルを利用して、様々な入力に基づいて、オイルの特性が経時的にどのように変化するかを予測することができる。AIモデルは、任意の適切なタイプのAIモデルを含むことができる。例えば、AIモデルは、長期短期メモリ(LSTM)モデル、他のタイプのリカレントニューラルネットワーク(RNN)、畳み込みニューラルネットワーク(CNN)などであり得るか、又はそれを含み得る。利用するAIモデルのタイプは、例えば、所与のAIモデルの精度、考慮すべき具体的な入力/出力が何か、ユーザ好みなどに基づいて選択することができる。いくつかの実施形態では、LSTMモデルなどのRNNモデルは、オイルの時系列の性質のため、好ましい。機械学習モデルは、本明細書では、AIモデルと同義であると称され得ることに留意されたい。
AIモデルは、訓練データのセットに基づいて、特定のオイル特性を予測するように訓練することができる。訓練データは、様々なソースによって提供され得る。例えば、ユーザは、AIモデルが、VRFシステムにおいてオイルがどのように利用されているかを判定するのに役立つことができる多様変数を含む入力のセット、及びシステム又は同様のシステムの実際の測定された動作状態に基づいて、対応する出力のセットを提供し得る。この場合、入力は、例えば、コンプレッサの動作速度、コンプレッサの付近の周囲温度、コンプレッサの吐出温度、コンプレッサの吸引圧力、コンプレッサの吐出圧力、コンプレッサ内のガスのガス温度などを含み得る。本明細書で定義されるように、コンプレッサの吐出温度は、VRFシステム内の過熱冷媒蒸気の温度測定値を指すことができ、吸引圧力は、動作中にコンプレッサによって生成された吸引圧力を指すことができ、吐出圧力は、コンプレッサの出力側で生成された圧力を指すことができる。出力は、例えば、オイル粘度、コンプレッサのオイル量、アキュムレータのオイル量などを含み得る。次いで、AIモデルは、入力、及び対応する出力を使用して、入力に基づいて出力の値を予測するように訓練することができる。もちろん、当該入力及び出力は、例のために与えられるものであり、AIモデルへの可能な入力を制限することを意味するものではない。
いくつかの実施形態では、シミュレーションモデルは、AIモデルを訓練するために使用される訓練データを生成するために利用される。シミュレーションモデルを使用して生成された訓練データは、別個に、又は他のソースから(例えば、実際のシステムの測定された状態から)集められた訓練データに加えて使用され得る。シミュレーションモデルは、様々なコンディションに基づいて、経時的なオイル戻りシステムの変化をシミュレーションするように構築することができる。言い換えると、シミュレーションモデルは、オイル戻りシステムの動作をデジタル的に模倣するように構築することができる。シミュレーションモデルの状態(例えば、オイル量、オイル粘度、エネルギー消費など)を操作して、多種多様なコンディションを表す訓練データを生成することができる。シミュレーションモデルは、複数回実行されて、様々な異なる負荷下で、異なる建物デバイスを使用して、異なる気象/環境条件下で、異なる時間などで、システムの経時的な進化を表す訓練データを生成し得る。VRFシステムに関して、シミュレーションモデルは、例えば、AIモデルが使用されない場合、VRFシステムを動作させるために典型的に使用され得る、閉ループ機能モックアップユニット(FMU)モデルであり得る。有利には、シミュレーションモデルを利用することによって、大量の訓練データを、訓練データを生成するために経時的に実際のシステムを動作させることと比較して、より短い期間で生成することができる。更に、シミュレーションモデルは、実際のシステムに、危険であり得、実際の建物内の居住者の快適性を妨害し得る条件を課すことなく、フリンジシナリオ(例えば、危険なほど高い負荷、危険な動作コンディション、デバイス障害など)を表す訓練データを生成するように実行され得る。
訓練データのセットに基づいて訓練されると、AIモデルは、入力に基づいてオイル特性を予測することができる。例えば、AIモデルは、オイルの粘度、コンプレッサ内のオイル量、及びアキュムレータ内のオイル量を予測し得る。予測されるオイル特性に基づいて、予測されるオイルの特性が、特性の値に関する所定の閾値(及び/又は他の制約)に従うかどうかを判定することができる。所定の閾値は、例えば、特性の値が上又は下でなければならない閾値、特性の許容可能な値の範囲など、値に対する任意の制限を含むことができる。オイル特性の値が、事前定義された閾値を満たしている場合、VRFシステムは、標準動作を継続することができる。しかしながら、オイル特性の値が、事前定義された閾値を満たしていない場合、是正措置を生成し、開始することができる。是正措置は、本明細書で定義されるように、いくつかの事前定義された制約/閾値を満たしていない1つ以上のオイルの特性に対処するために行われる任意の措置を指すことができる。例えば、是正措置は、ユーザデバイスに通知を生成及び伝送すること、VRFシステム上でメンテナンスを実行する、及び/又はオイルを交換するように技術者をスケジュールすること、制御信号に基づいて、制御信号を生成すること、及び建物装置(例えば、VRFデバイス)を動作させること、特定の建物デバイスを無効にすること、新しいオイルを、VRFシステムに自動的に注入すること、閾値違反をデータベースに記録することなどを含み得る。開始する是正措置は、違反した閾値、違反した閾値の量(例えば、オイル特性の実際の値と閾値との間の差)、ユーザ好み、及び/又は他の適用可能な考慮事項などの様々な要因に基づいて決定することができる。オイル特性に関する閾値の違反は、オイルが、いくつかの所望の特性(例えば、所望の粘度)を欠いているという点で、オイルの欠乏を示すこともできる。本明細書に記載されるように、閾値の違反は、最大値閾値の場合、値(例えば、予測された値)が閾値を上回っている場合、又は最小値閾値の場合、閾値を下回っている場合を指すことができる。
ここで図8を参照すると、いくつかの実施形態による、オイルの特性を予測するためのオイル管理コントローラ800のブロック図が示される。特に、オイル管理コントローラ800は、VRFシステムにおけるオイルの特性を予測し得る。しかしながら、オイル管理コントローラ800は、適切に動作するためにオイルを必要とする様々な他のシステム/デバイス(例えば、他のHVACシステム、カーシステムなど)に適用することができる。いくつかの実施形態では、オイル管理コントローラ800及び/又はその構成要素は、図3~図4を参照して説明されたBMSコントローラ366、及び/又は別のコントローラに組み込まれる。いくつかの実施形態では、オイル管理コントローラ800は、図7A~図7Bを通して説明されるVRFシステムのいくつか及び/又は全てを動作させるために使用される。
オイル管理コントローラ800は、通信インターフェース808及び処理回路802を含むことが示されている。通信インターフェース808は、様々なシステム、デバイス、又はネットワークとデータ通信を行うための、有線又は無線インターフェース(例えば、ジャック、アンテナ、伝送機、受信機、トランシーバ、有線端末など)を含み得る。例えば、通信インターフェース808は、イーサネットベースの通信ネットワークを介してデータを送信及び受信するためのイーサネットカード及びポート、及び/又は無線通信ネットワークを介して通信するためのWi-Fiトランシーバを含み得る。通信インターフェース808は、ローカルエリアネットワーク又はワイドエリアネットワーク(例えば、インターネット、建物WANなど)を介して通信するように構成され得、様々な通信プロトコル(例えば、BACnet(登録商標)、IP、LON(登録商標)など)を使用し得る。
通信インターフェース808は、オイル管理コントローラ800と、様々な外部システム又はデバイス(例えば、装置822、センサ820、ユーザデバイス824など)との間の電子データ通信を容易にするように構成されたネットワークインターフェースであり得る。例えば、オイル管理コントローラ800は、通信インターフェース808を介して、装置822から装置フィードバックを受信し得る。
処理回路802は、プロセッサ804及びメモリ806を含むことが示されている。プロセッサ804は、汎用若しくは特定目的プロセッサ、特定用途向け統合回路(ASIC)、1つ以上のフィールドプログラマブルゲートアレイ(FPGA)、処理構成要素のグループ、又は他の好適な処理構成要素であり得る。プロセッサ804は、メモリ806に記憶された、又は他のコンピュータ可読媒体(例えば、CDROM、ネットワーク記憶装置、リモートサーバなど)から受信された、コンピュータコード又は命令を実行するように構成され得る。
メモリ806は、本開示に記載の様々なプロセスを完了及び/又は容易にするための、データ及び/又はコンピュータコードを記憶するための1つ以上のデバイス(例えば、メモリユニット、メモリデバイス、記憶デバイスなど)を含み得る。メモリ806は、ランダムアクセスメモリ(RAM)、読み取り専用メモリ(ROM)、ハードドライブ記憶装置、一時記憶装置、不揮発性メモリ、フラッシュメモリ、光メモリ、又はソフトウェアオブジェクト及び/若しくはコンピュータ命令を記憶するための任意の他の好適なメモリを含み得る。メモリ806は、データベース構成要素、オブジェクトコード構成要素、スクリプト構成要素、又は本開示に記載される様々な活動及び情報構造をサポートするための任意の他のタイプの情報構造を含み得る。メモリ806は、処理回路802を介して、プロセッサ804に通信可能に接続され得、本明細書に記載の1つ以上のプロセスを(例えば、プロセッサ804によって)実行するためのコンピュータコードを含み得る。いくつかの実施形態では、メモリ806の1つ以上の構成要素は、単一の構成要素の一部である。しかしながら、メモリ806の各構成要素は、説明を容易にするために、独立して示される。
メモリ806は、訓練データ収集器810を含むように示される。訓練データ収集器810は、1つ以上の訓練データソース818から、人工知能モデルを訓練するために使用される訓練データを収集することができる。具体的には、訓練データ収集器810は、VRFシステム内のオイルの特性に関連付けられた訓練データを取得することができる。いくつかの実施形態では、訓練データ収集器810は、訓練データソース818にクエリを伝送して、訓練データを取得する。いくつかの実施形態では、訓練データ収集器810は、訓練データを能動的に要求する必要なしに、訓練データソース818から受動的に訓練データを受信し得る。
訓練データソース818は、訓練データ収集器810に訓練データを記憶及び/又は提供することができる任意のデータソースを含むことができる。例えば、訓練データソース818は、記憶された訓練データセットを、訓練データ収集器810に提供することができるユーザデバイス(例えば、ラップトップ、デスクトップコンピュータ、モバイルデバイス、タブレットなど)であり得るか、又はそれを含み得る。別の例として、訓練データソース818は、オイル量、オイル粘度などの追加の出力を備える標準VRFプラントモデルを利用することに関連付けられたデータを記憶するデータベース(例えば、クラウドデータベース)であり得るか、又はそれを含み得る。当該例では、VRFプラントモデルは、VRFシステムを動作させるために使用される標準モデルであり得る。このようにして、訓練データは、オイル特性の測定値とともに、実際の動作におけるVRFシステムからの測定値を含むことができる。
いくつかの実施形態では、訓練データ収集器810は、シミュレーションモデルを利用して、モデルジェネレータ812によって使用される訓練データのいくつか又は全てを生成して、AIモデルを生成する。シミュレーションモデルは、実際のシステムが、様々な条件(例えば、気象条件、加熱/冷却負荷、デバイス制限など)下でどのように動作し得るか、及びシステム内のオイルが、どのように消費され得るか、及び/又はそうでなければ経時的に変化し得るかをモデル化することができる。このようにして、訓練データ収集器810は、訓練データソース818から訓練データを取り出す必要がない場合があり、代わりに、オイル管理コントローラ800内で訓練データを生成することができる。いくつかの実施形態では、シミュレーションモデルは、シミュレーションモデルを実行した結果として生成される訓練データを、オイル管理コントローラ800に提供することができる、サードパーティコントローラ/デバイス/システム(例えば、クラウドコンピューティングシステム)によってホストされる。いずれの場合でも、シミュレーションモデルを使用/実行して、実際のシステムが動作を通じて訓練データを生成するのを待つよりも短い期間で、オイルを利用するシステムの様々な動作コンディションを表す様々な訓練データを生成することができる。更に、シミュレーションモデルは、単に訓練データを生成するために、実際のシステムがその下で動作することが危険であり得るフリンジシナリオを例示する訓練データを生成するために実行され得る。
取得された訓練データに基づいて、訓練データ収集器810は、収集された訓練データを、訓練データセットに組み合わせ、モデルジェネレータ812に訓練データセットを提供することができる。訓練データセットに基づいて、モデルジェネレータ812は、経時的にオイル特性をモデル化するAIモデルを生成することができる。具体的には、モデルジェネレータ812は、AIモデルを訓練して、指定された入力に基づいて、オイル特性を予測することができる。例えば、モデルジェネレータ812は、AIモデルを、コンプレッサ速度、周囲温度、吐出温度、吸引圧力、吐出圧力、及びガス温度の入力に基づいて、オイル粘度、1つ以上のコンプレッサ内のオイル量、及びアキュムレータ内のオイル量の値を予測するように訓練し得る。
モデルジェネレータ812によって生成されるAIモデルは、様々なAIモデル構造のいずれかであり得る。いくつかの実施形態では、AIモデルは、LSTMモデルなどのRNNモデルである。この場合、RNNがVRFシステム上で適切に動作するために、元のFMUプラントモデルを利用して、RNNモデルが、それに基づいて分析及び訓練するのに十分なシミュレーションデータを生成することができる。訓練時間が増加するにつれて、最終的なRNNモデルは、元のプラントモデルとはるかに近い機能を有し得る。特に、RNNモデルを使用するいくつかの利点は、FMUプラントモデルと比較して、より速く、より高い安定性を有し得ることである。更に、訓練されたRNNモデルは、オイル戻りの影響を低減し、VRFシステムの効率を向上させ得る。特にLSTMモデルについては、LSTMモデルは、深層学習に使用される人工RNNである。LSTMモデルは、時系列データのシーケンス全体を分類及び処理することができ、時系列内の重要なイベント間の未知の期間のラグがあっても予測を行うことができる。モデルジェネレータ812によって生成されたLSTMモデルは、実装態様に応じて様々な構造を含み得る。例えば、モデルジェネレータ812によって生成されたLSTMモデルは、1つのシーケンス入力層、1つのドロップアウト層、2つの全結合層、及び2つのLSTM層を含み得る。
いくつかの実施形態では、AIモデルは、CNNモデルである。この場合、CNNモデルは、例えば、入力層、複数の隠れ層(例えば、正規化線形ユニット層、プーリング層、全結合層、正規化層など)、出力層などを含み得る。いくつかの実施形態では、AIモデルは、いくつかの他の人工知能モデルアーキテクチャに従う。AIモデルの例示的なアーキテクチャは、図9A及び図9Bを参照して以下により詳細に説明する。
モデルジェネレータ812は、様々な訓練技術を利用して、AIモデルを生成し得る。例えば、モデルジェネレータ812は、運動量アプローチを伴う確率的勾配降下法、適応モーメント推定アプローチ、二乗平均平方根伝播アプローチなどを利用し得る。二乗平均平方根伝播アプローチに関して、モデルジェネレータ812は、二乗平均平方根誤差(RMSE)を利用して、モデル予測が、訓練データ収集器810によって提供された訓練データに対してどれだけ正確であるかを測定し得る。具体的には、モデルジェネレータ812は、以下の式に基づいて、経時的にRMSEを監視し得る。
式中、Y
pred,tは、時間ステップtでの変数Yに対するAIモデルの先行予測であり、Y
test,tは、時間ステップtでの訓練データによって示される変数Yの実測値である。(Y
pred,t-Y
test,t)
2の計算は、各時間ステップt=1…nに対して実行することができ、nは、予測の総数である。次いで、各差を一緒に平均化することができる。訓練プロセスの間、モデルジェネレータ812は、AIモデルを改良して、RMSEを低減することができる。AIモデルを訓練する例示的な実験は、図11A及び図11Bを参照して以下で詳細に説明する。
モデルジェネレータ812は、生成されたAIモデルを、予測ジェネレータ814に提供することができる。予測ジェネレータ814は、AIモデルを使用して、経時的なオイル特性の予測を生成することができる。当該予測を生成するために、予測ジェネレータ814は、様々なソースから、AIモデルによって必要とされる入力の値を取得するように動作することができる。例えば、予測ジェネレータ814は、装置822からの装置フィードバック、センサ820からの測定された変数、及び/又は入力値の任意の他の適切なソースを取得し得る。
装置822は、AIモデルによって必要とされる入力の値を提供することができる任意のデバイスであることができるか、又はそれを含むことができる。例えば、VRFシステムでは、装置822は、コンプレッサ、熱交換器、アキュムレータなどを含み得る。より具体的には、AIモデルが入力としてコンプレッサ速度を必要とする場合、装置822は、予測ジェネレータ814への装置フィードバックとして動作速度を提供することができる1つ以上のコンプレッサを含み得る。
センサ820は、AIモデルによって必要とされる入力(すなわち、変数)の値を測定することができる様々なセンサであり得るか、又はそれを含み得る。例えば、センサ820は、吸引圧力及び/又は吐出圧力を測定する圧力センサを含み得る。別の例として、センサ820は、周囲温度、吐出温度、及び/又はガス温度を測定する温度センサを含み得る。
AIモデル及び取得された入力値に基づいて、予測ジェネレータ814は、取得された入力値をAIモデルに渡すことによって、オイル特性予測を生成することができる。取得された入力値をAIモデルに渡した結果、AIモデルは、1つ以上のオイル特性(例えば、オイル粘度、コンプレッサ内のオイル量、アキュムレータ内のオイル量など)の値を出力することができる。このようにして、VRFシステム内のオイルの特性は、オイル特性を測定するための追加のセンサを必要とせずに推定することができる。
いくつかの実施形態では、予測ジェネレータ814は、VRFシステム内の複数の段階でのオイルに関する予測を生成する。例えば、予測ジェネレータ814は、コンプレッサによって出力されるオイル冷媒混合物の粘度の予測を生成し得、オイルが、オイル冷媒混合物から分離された後のオイルだけの別個の粘度を予測し得る。当該例では、オイル冷媒混合物の粘度及びオイルだけの粘度を予測することは、オイルが、特定の是正措置(例えば、VRFシステムから追加/除去するオイルの量)からどのように利益を得ることができるかを判定するのに有益であり得る。VRFシステム内の複数の段階のオイルに関する予測を生成することによって、オイル欠乏は、VRFシステムの単一のポイントではなく、VRFシステム全体にわたって経時的に予測及び追跡することができる。
予測ジェネレータ814は、是正措置ジェネレータ816にオイル特性の予測を提供することができる。是正措置ジェネレータ816は、予測されたオイル特性を分析して、何らかの是正措置が開始されるべきかどうか、及びどのような是正措置が開始されるべきかを判定することができる。上記で定義されているように、是正措置は、いくつかの事前定義された閾値を満たしていないオイル特性に対処するために取られた任意の措置を指すことができる。是正措置は、例えば、特定のオイル特性が、所定の閾値に違反していることをユーザに示すための通知/警告をユーザデバイス824に配布すること、オイル戻り制御で装置822を動作させること、装置822を無効にすること、装置822で実行されるメンテナンス活動を自動的にスケジュールすること、閾値違反をデータベースに記録することなどを含み得る。事前定義された閾値は、ユーザによって定義され、製造元によって提供され、VRFシステム内の装置の動作状態などに基づいて推定されるなどであり得る。例えば、製造元は、コンプレッサを動作させるべき許容可能なオイル粘度レベルの範囲を定義し得る。この場合、過度に粘性の高いオイル及び/又は低粘性のオイルは、コンプレッサのより迅速な劣化をもたらし得る。別の例として、ユーザは、アキュムレータ内のオイルの最低許容量を定義する最小オイル量閾値を定義し得る。理解されるべきであるように、オイル特性に対して定義される閾値は、様々なソース(例えば、製造元、ユーザ、予測に基づくなど)から取得することができ、様々な制限タイプ(例えば、範囲、閾値、特性に相当すべき正確な値など)を含むことができる。
より具体的な例として、AIモデルが、コンプレッサ内のオイル量、アキュムレータ内のオイル量、オイルの粘度、及び/又はコンプレッサを流れるオイル冷媒混合物の粘度を含むオイル特性の値を予測するシナリオを検討する。実施例では、是正措置ジェネレータ816は、コンプレッサ及びアキュムレータ内のオイル量が、それぞれ第1及び第2の最小閾値を上回っているかどうかを判定し得る。コンプレッサ内のオイル量が低い場合、是正措置ジェネレータ816は、コンプレッサが、オイル戻り制御で動作して、外部ソース(例えば、室内VRFシステム)から及び/又はアキュムレータからオイルを回収するべきであると判定し得る。本明細書で定義されるように、オイル戻り制御は、コンプレッサが高速で動作して、室外システムからオイルを戻す動作モードを示し得る。オイル戻り制御は、高いエネルギー消費をもたらすことができ、コンプレッサがオイルを回収するために作動している間、必要な加熱/冷却が一時的に保留され得る。アキュムレータ内のオイル量が、第2の最小閾値を下回る場合、是正措置ジェネレータ816は、オイル量が低すぎるため、より多くのオイルをVRFシステムに追加すべきであると判定し得る。オイルの追加は、オイル戻り制御でコンプレッサを動作させることから生じ得、ユーザが新しいオイルを手動でVRFシステムに追加することなどを含み得る。
同様に、是正措置ジェネレータ816が、オイル又はオイル冷媒混合物の粘度が、事前定義された範囲外であると判定する場合、是正措置ジェネレータ816は、オイルが、VRFシステムから追加又は除去されるべきであると判定し得る。具体的には、オイル冷媒混合物の粘度が、範囲の最大境界を上回る場合、是正措置ジェネレータ816は、粘度を低下させるために、VRFシステムからオイルを除去(すなわち、オイル冷媒混合物中のオイルの量を減少させる)すべきであると判定し得る。オイル冷媒混合物の粘度が、範囲の最小境界を下回る場合、是正措置ジェネレータ816は、粘度を増加させるために、VRFシステムにオイルが添加される(すなわち、オイル冷媒混合物中のオイルの量を増加させる)べきであると判定し得る。オイル自体に関して、オイルの粘度が、範囲の最大境界を上回る場合、是正措置ジェネレータ816は、新しいオイルが、既存のオイルと比較して粘度が低いと予想される場合、粘度を低くするために、VRFシステムにオイルを追加すべきであると判定し得る。オイルの粘度が、最小境界を下回る場合、是正措置ジェネレータ816は、粘度を増加させるために、オイルを除去すべきであると判定し得る。
いくつかの実施形態では、是正措置ジェネレータ816は、経時的にAIモデルの出力を比較して、特定のオイル特性が、閾値違反に近づいており、それによって欠乏を含むかどうかを判定する。この場合、是正措置ジェネレータ816は、AIモデルによって出力されるオイル特性の値を、オイル特性の以前の出力された値と比較し得る。特定のオイル特性が、閾値に違反する傾向にある場合、是正措置ジェネレータ816は、違反が発生する前に先制的に是正措置を開始し得る。例えば、オイルの粘度が、経時的に増加しており、現在の傾向に基づいて、今後の期間内に粘度の上限を超える場合、是正措置ジェネレータ816は、オイルの粘度が最大限界を超える前に是正措置を開始し得る。有利には、是正措置の先制開始は、装置(例えば、コンプレッサ)が、オイル特性閾値の違反に関連付けられた条件下で動作される時間を確実に減らすことができる。当該時間を削減することは、同様に、装置の劣化を削減し、エネルギー消費を削減し、他の利点を提供することができる。
いくつかの実施形態では、是正措置ジェネレータ816は、装置822及び/又は他のデバイス/システムへの影響を低減するための特定の是正措置を開始する時間を予測する。例えば、是正措置ジェネレータ816は、建物によって必要とされる加熱/冷却負荷への負の影響を低減するために、オイル戻り制御を開始する時間を予測し得る。上述したように、オイル戻り制御下でコンプレッサを動作させると、オイル戻り制御の間、必要な加熱/冷却が一時的に延期される可能性がある。したがって、是正措置ジェネレータ816は、必要とされる加熱/冷却への影響が低減され得る(例えば、最小化され得る)時間を予測することができる。別の例として、新しいオイルがシステムに導入される必要がある場合、是正措置ジェネレータ816は、新しいオイルが個人によってシステムに安全に追加することができるように、装置822を一時的に無効にする時間を予測することができる。
是正措置ジェネレータ816は、様々な技術を利用して、特定の是正措置を開始する時間を予測することができる。例えば、是正措置ジェネレータ816は、経時的に特定の変数を追跡し、システムへの少量の中断をもたらし得る値のより低い範囲を識別し得る。特定の例として、是正措置ジェネレータ816は、建物内の環境コンディションへの影響が低減されるように、低い加熱/冷却ニーズに関連付けられた値の範囲を識別し得る。識別された値の範囲に基づいて、是正措置ジェネレータ816は、経時的に実際の加熱/冷却ニーズを追跡し得、実際の加熱/冷却ニーズが識別された範囲内にある期間を識別することに応答して、当該期間中に是正措置を開始することができる。このようにして、是正措置ジェネレータ816は、是正措置を開始することが低い全体的な影響をもたらす期間を効果的に予測している。
いくつかの実施形態では、是正措置ジェネレータ816は、是正措置が必要でない場合(例えば、オイル粘度及びオイル量が適切な値にある場合)に、標準の装置コントローラとして動作することができる。言い換えると、是正措置ジェネレータ816は、装置822を動作させて、建物内のいくつかの可変状態又はコンディション(例えば、温度、湿度など)に影響を与えるために、装置822に対する制御信号を生成することができる。いくつかの実施形態では、是正措置ジェネレータ816は、予測ジェネレータ814によって提供される予測に基づいて、装置822に対する境界条件を設定するように構成され得る。例えば、是正措置ジェネレータ816は、オイル粘度の予測に基づいて、コンプレッサの最大速度を設定し得る。当該例では、粘度が適切な範囲内にあり、範囲の違反に近づいていない場合、是正措置ジェネレータ816は、オイル粘度が適切であるため、より高速でコンプレッサを動作させるための制御信号を生成し得る。
何らかの是正措置を開始した結果、オイル特性に対する閾値の任意の違反に対処することができる。これは、いくつかのオイル特性違反に関連付けられたコンディション下で、装置822が動作している間の時間を確実に減らす(例えば、最小限にする)ことができる。全体として、VRFシステムでは、AIモデルに基づく予測を使用して、是正措置を開始することは、ハードウェアコストを節約し、オイル戻りの影響を低減し、VRFシステムの効率を向上させることができるなどの利点がある。
ここで図9Aを参照すると、いくつかの実施形態による、リカレントニューラルネットワーク(RNN)構造900の例示が示される。具体的には、RNN構造900は、図8を参照して上述したAIモデルとして生成及び利用することができるRNNモデル(例えば、LSTMモデル)の構造を例示することができる。
RNNは、ノード間の接続が、時間的シーケンスに沿って有向グラフを形成する、人工ニューラルネットワークのクラスである。VRFシステムの場合、RNN構造900によって表されるRNNモデルは、FMUプラントモデルに基づいて収集されたシミュレーションデータを使用して、生成され得る。訓練時間が長くなるにつれて、RNNモデルは、VRFシステムに対するオリジナルのプラントモデルとますます近い機能を有することができる。
RNN構造900は、凝縮されたネットワーク構造、及び凝縮されたネットワーク構造を「展開」することができる方法を例示して、RNN構造900が時間的シーケンスにわたってどのように動作するかを例示する。具体的には、凝縮された(「折り畳まれた」)構造と展開された構造は等価であり、展開された構造は、時間的シーケンスにわたるRNNモデルの使用をより詳細に例示する。
RNN構造900は、RNNモデルによって必要とされる入力を含むベクトルであり得る、xとして表される入力を含むことが示される。VRFシステムの場合、入力ベクトルxは、例えば、コンプレッサ速度、周囲温度、吐出温度、吸引圧力、吐出圧力、ガス温度などを含み得る。重みベクトルUを、xに適用することができ、結果を、隠れ層ベクトルhに提供することができる。同様に、重みベクトルVは、前の時間ステップの隠れ層ベクトルに適用することができる。重み付けられた入力、及び前の隠れ層ベクトルの重み付けられた値に基づいて、関数を適用して、重みベクトルWが適用された後に、出力oをもたらすことができる対応する出力を決定することができる。このプロセスは、時間的シーケンスの各時間ステップに対して繰り返すことができる。言い換えると、新しい入力ベクトルxtは、時間ステップtに対して取得することができ、xt、以前の状態ht-1、及び対応する重みベクトルU、V、及びWに基づいて、出力ベクトルotは、時間ステップtに対して決定することができる。
オイル管理コントローラ800によって生成及び使用されるRNNモデルに、RNN構造900を組み込んだ結果、RNNモデルの予測は、以前の時間ステップの結果として経時的に修正され得る。変化するコンディション(例えば、変化する環境コンディション、動作コンディションなど)の結果、オイル特性が経時的に変化するため、いくつかの他のニューラルネットワークアーキテクチャがそうであるように、元の訓練プロセスによって制限されるのとは対照的に、時間的シーケンスにわたる変化を考慮するRNNモデルの独自の能力のために、特にRNNモデルを利用することは、有用であり得る。
ここで図9Bを参照すると、いくつかの実施形態による、ニューラルネットワーク(NN)アーキテクチャ950の例示が示される。NNアーキテクチャ950は、VRFシステム(例えば、VRFシステム600)に対する、図8を参照して上述したAIモデルによって利用され得る一般的なアーキテクチャを記述することができる。具体的には、NNアーキテクチャ950は、ニューラルネットワークが、VRFシステムに関連する入力のセットに基づいて、出力のセットを生成することができる方法を例示することができる。しかしながら、NNアーキテクチャ950が、単に、利用することができるニューラルネットワークアーキテクチャの例のために提供され、図8を参照して説明されたAIモデルによって利用することができるニューラルネットワークアーキテクチャに制限することを意図するものではないことに留意されたい。
NNアーキテクチャ950は、コンプレッサ速度、周囲温度、吐出温度、吸引圧力、吐出圧力、及びガス温度を入力として受け取ることが示される。各入力は、NNアーキテクチャ950内の入力層の特定の入力ノードに関連付けられ得る。言い換えると、入力層内のいくつかのノードは、1対1の関係として、いくつかの実際の入力に対応し得る。図9Bに示される入力は、単に例のために提供されることを理解されたい。NNアーキテクチャ950は、実装態様に応じて様々な異なる入力を説明するように修正され得る。例えば、ガス温度が入力として考慮されない場合、入力層は、5つの入力ノードのみを含み得る。
NNアーキテクチャ950はまた、隠れノードを含む隠れ層を含むことが示される。NNアーキテクチャ950では、隠れ層は、入力層の入力ノードの数に相当するいくつかの隠れノードを含む単一の層を含むように示される。しかしながら、様々な実施形態によれば、隠れ層は、いくつかの入力ノードに対応し得るか、又はし得ない様々な数の隠れノードを含む1つ以上の層を含むことができることに留意されたい。例えば、畳み込みニューラルネットワークアーキテクチャでは、NNアーキテクチャ950は、様々な数の隠れノードを有する複数の隠れ層(例えば、複数の畳み込み層)を含み得る。更に、各層のノードは、図9Bに示されるように、必ずしも隣接する層の全てのノードに接続する必要はない。
NNアーキテクチャ950では、重みWは、2つのノード間の接続に関して適用することができる。いくつかの実施形態では、ノード間の各接続は、特定の接続に対する特定の値を含む。例えば、入力層の入力ノード1と、隠れ層の隠れノード1との間の重みは、入力ノード1と隠れ層の隠れノード2との間の重みとは異なり得る。いくつかの実施形態では、ノード間の様々な接続は、同じ重みに関連付けられ得る。例えば、LSTM固有のアーキテクチャでは、入力ノードと隠しノードとの間の接続に関連付けられた重みは同じであり得る。
特定のノードに入力される各重み付けられた値に基づいて、関数を適用して、ノードの合成値を決定することができる。例えば、NNアーキテクチャ950の隠れノード1について、関数は、ノードに入力される重み付けされた入力値に適用されて、隠れノード1の合成値を決定することができる。特定の層の出力を決定するために、特定の層内の各ノードの合成値。特定の層の出力は、特定の層と後続の層との間の重みとともに、後続の層への入力に対応することができる。このプロセスは、出力層に到達するまで、各層に対して繰り返すことができる。
NNアーキテクチャ950はまた、出力ノードを含む出力層を含むことが示される。出力層内のいくつかの出力ノードは、1対1でNNモデルの所望の出力に対応することができる。特にVRFシステムに関して、出力は、オイル粘度、オイル冷媒混合粘度、1つ以上のコンプレッサのオイル量、及びアキュムレータのオイル量を含み得る。したがって、第1、第2、及び第3の出力ノードは、オイル粘度、1つ以上のコンプレッサのオイル量、及びアキュムレータのオイル量にそれぞれ対応することができる。NNアーキテクチャ950に関して、出力ノード1の合成値は、オイル粘度に対応することができ、出力ノード2の合成値は、1つ以上のコンプレッサのオイル量に対応することができ、出力ノード3の合成値は、アキュムレータのオイル量に対応することができる。このようにして、単に入力値をNNアーキテクチャ950に提供することによって、出力の予測された値を生成することができる。
ここで図10を参照すると、いくつかの実施形態による、AIモデルを使用してオイル特性を監視するためのプロセス1000のフロー図が示される。プロセス1000は、AIモデルを利用して、オイル特性の値を予測することができ、当該値が、事前定義された閾値を満たさない場合、是正措置を開始することができる。プロセス1000は、主に建物システム(例えば、VRFシステム)を参照して説明されるが、プロセス1000は、適切な動作のためにオイルを必要とする構成要素/デバイスを含む様々なシステムに適用することができる。例えば、プロセス1000は、VRFシステム、他のHVACシステム、カーシステムなどに適用することができる。いくつかの実施形態では、プロセス1000のいくつかの及び/又は全てのステップは、図8を参照して説明されたオイル管理コントローラ800によって実行される。
プロセス1000は、建物の建物装置によって使用されるオイルに影響を与えるコンディションと、オイルの特性との間の関係を記述する訓練データを取得することを含むことが示される(ステップ1002)。建物装置は、建物の可変状態又はコンディションに影響を与えることができ、適切な動作のためにオイルを利用する様々な装置を含むことができる。例えば、建物装置は、コンプレッサ、AHU、他のサブプラントなどを含み得る。訓練データは、様々なソースから取得することができる。例えば、訓練データは、建物装置の動作に関連付けられた履歴情報を記憶するデータベース(例えば、クラウドデータベース)にアクセスすることによって、建物装置の製造元によって提供される訓練データを使用することなどによって、ユーザからの直接入力を介して取得され得る。いくつかの実施形態では、ステップ1002は、シミュレーションモデルを使用して訓練データを生成することを含む。シミュレーションモデルが使用される場合、シミュレーションモデルは、ステップ1002で取得される訓練データのいくつか及び/又は全てを生成することができる。シミュレーションモデルは、例えば、動作中に建物装置のデバイスによって使用されるオイルの量、外部気象条件及び/又は他の周囲条件がシステムにどのように影響するか、建物の様々な加熱/冷却負荷など、建物装置を含む、システムの様々な態様を考慮するように構成することができる。訓練データの生成中、シミュレーションモデルに関連付けられた変数を操作して、様々なシナリオを表す訓練データを生成することができる。ステップ1002でシミュレーションモデルを使用することは、建物装置の実際の動作に基づいてデータを集めることと比較して、より多くの訓練データがより短い時間で利用可能であることをもたらすことができる。更に、ステップ1002でシミュレーションモデルを使用することは、実際のデバイス動作に基づいて収集された訓練データに典型的には含まれない場合があるフリンジケースを記述する訓練データを取得するのに役立つことができる。いくつかの実施形態では、ステップ1002は、訓練データ収集器810によって実行される。
プロセス1000は、オイルの特性をモデル化するための訓練データに基づいて、人工知能(AI)モデルを生成することを含むことが示される(ステップ1004)。ステップ1004で生成されるAIモデルは、例えば、RNNモデル(例えば、LSTMモデル)、CNNモデルなどの様々な異なるAIモデルであり得る。AIモデルは、オイルに影響を与えるコンディション、及びオイル特性そのものを関連付けるように生成することができる。具体的には、AIモデルは、特定の入力(例えば、コンプレッサ速度、周囲温度、吐出温度、吸引圧力、吐出圧力、ガス温度など)を特定の出力(例えば、オイル粘度、コンプレッサ内のオイル量、アキュムレータ内のオイル量など)に関連付けるように訓練され得る。いくつかの実施形態では、ステップ1004は、コンディションと、オイルの特性との間の関係を考慮するために、AIモデルのノード間の接続に関連付けられた重みを訓練することを含み得る。いくつかの実施形態では、ステップ1004は、モデルジェネレータ812によって実行される。
プロセス1000は、AIモデルを使用して、モデル入力のセットに基づいて、経時的なオイル特性の予測を生成することを含むように示されている(ステップ1006)。ステップ1004で上述したように、AIモデルは、特定の入力を特定の出力に関連付けるように訓練することができる。したがって、訓練されると、AIモデルは、入力の値を利用して、出力の対応する値(すなわち、オイル特性)を予測することができる。いくつかの実施形態では、ステップ1006は、予測ジェネレータ814によって実行される。
プロセス1000は、予測が、任意の制約に違反するかどうかを判定することを含むことが示される(ステップ1008)。いくつかの実施形態では、制約は、オイル特性の許容値を定義する事前定義された制約である。例えば、制約は、オイル特性の値が、上回る/下回るべき閾値、オイル特性の値が、内にあるべき値の許容範囲などを含み得る。具体的には、制約は、違反してはならない閾値であり得る。特定の例として、オイル粘度に対する制約は、オイル粘度が内にあり得る許容値の範囲として定義され得る。当該例では、予測されたオイル粘度が、範囲の最大値を上回る場合、又は範囲の最小値を下回る場合、違反が識別され得る。予測されたオイルの特性がいかなる制約にも違反せず、したがって欠陥を有しない場合(ステップ1008、「いいえ」)、プロセス1000は、ステップ1006から開始することを繰り返し得る。この場合、オイル特性を経時的に監視/追跡することができるように、後続の時間ステップに対して新しい予測セットを生成することができる。しかしながら、制約違反が識別された場合(ステップ1008、「はい」)、プロセス1000は、ステップ1010に進み得る。いくつかの実施形態では、単一の制約違反は、プロセス1000がステップ1010に進む結果となる。いくつかの実施形態では、プロセス1000がステップ1010に進むためには、複数の制約違反(例えば、2つの制約違反、3つの制約違反など)が必要とされ得る。いくつかの実施形態では、ステップ1008は、ステップ1010に進むかどうかを判定する際に、特定の制約違反の深刻度を少なくとも部分的に考慮することを含む。例えば、最大粘度0.001パスカル秒を超えるオイル粘度は、プロセス1000がステップ1010に進むために、いくつかの他の制約にも違反する必要があり得るが、一方で、最大粘度1パスカル秒を超えるオイル粘度は、プロセス1000がステップ1010に進むために、単独で十分であり得る。いくつかの実施形態では、ステップ1008は、オイル特性が、今後の期間内に制約に違反するかどうかを予測することを含み得、そうである場合、プロセス1000をステップ1010に進ませて、予期される違反に先制的に対処させることができる。いくつかの実施形態では、ステップ1008は、是正措置ジェネレータ816によって実行される。
プロセス1000は、どのオイル特性が制約に違反したかに基づいて、是正措置を判定することを含むことが示される(ステップ1010)。言い換えると、是正措置は、1つ以上の制約/閾値に違反している特定のオイル特性に対処するように判定され得る。例えば、オイルの粘度が、制約(例えば、最大許容粘度)に違反する場合、判定される是正措置は、建物装置の整備が、オイル粘度を低減するために必要であり得ることを、ユーザに通知するために、ユーザデバイスに通知を伝送することであり得る。別の例として、コンプレッサのオイル量が、最小閾値を下回る場合、ステップ1010で判定された是正措置は、(例えば、アキュムレータから、室内VRFシステムからなど)より多くのオイルを回収するために、オイル戻り制御でコンプレッサを動作させることであり得る。いくつかの実施形態では、ステップ1010は、是正措置が発生するための特定の時間及び/又は期間を判定することを含む。特定の時間及び/又は期間を判定するために、ステップ1010は、システムのコンディション(例えば、デバイスの動作コンディション、周囲コンディションなど)を監視して、コスト、加熱/冷却効率などへの最も小さい影響が発生する時間を判定することを含み得る。いくつかの実施形態では、是正措置が、通知を伝送している場合、又は制約違反が、深刻である場合、判定された時間及び/又は期間は、可能な限り早い時間(例えば、直ちに)であり得る。いくつかの実施形態では、ステップ1010は、是正措置ジェネレータ816によって実行される。
プロセス1000は、是正措置を開始することを含むことが示される(ステップ1012)。ステップ1010で判定された是正措置を開始することによって、ステップ1008で識別された1つ以上の制約/閾値違反に対処することができる。このようにして、1つ以上の制約/閾値違反がアクティブである全体的な時間を短縮することができる。制約/閾値に違反する時間を短縮することは、建物装置の劣化を低減し、コスト(例えば、エネルギーコスト)を削減することに役立つことができ、システムの全体的な安全性を高めることができるなどの利点がある。いくつかの実施形態では、ステップ1010が、是正措置がいつ実行されるべきかを判定することを含む場合、ステップ1012は、判定された時間に是正措置を開始することを含むことができる。いくつかの実施形態では、ステップ1012は、是正措置ジェネレータ816によって実行される。
実験結果
概して図11A~図12Cを参照すると、いくつかの実施形態による、例示的な実験の結果が示される。図11A~図12Cの例示的な実験は、単に例示の目的のために提供され、本開示を制限することを意図しないが、むしろオイル特性を予測する際にAIモデルを利用する実用性を示すことが意図される。図11A~図12Cを通して以下で参照されるAIモデルは、オイル特性を予測する目的で訓練されたRNNモデルである。
ここで図11A及び図11Bを参照すると、いくつかの実施形態による、例示的な実験に対する、AIモデルの訓練プロセスの結果を例示する一対のグラフが示される。図11Aは、例示の訓練プロセスのいくつかの反復に基づいて、RMSEの変化を例示するグラフ1100を含むことが示されている。図11Bは、反復の数に基づいて、損失の変化を例示するグラフ1150を含むことが示されている。図11A及び図11Bに関連付けられた例示的な訓練プロセスは、訓練データとして各テストケースに約4000秒割り当てられた、VRFモデルベースの定義(MBD)オイル粘度プラントモデルからの10の閉ループテストケースを利用した。AIモデルの精度を判定するために、各テストケースに約4000秒割り当てられた、VRF MBDオイル粘度プラントモデルからの単一のテストデータセットを、比較のために使用した。
グラフ1100は、シリーズ1102を含むことが示されている。シリーズ1102は、訓練プロセスの追加の反復の結果として、AIモデルに関連付けられたRMSEがどのように変化するかを例示することができる。具体的には、シリーズ1102は、反復の数が増加するにつれて概して減少傾向を例示している。言い換えると、反復の数を増やすことで、AIモデルの精度を向上させることができる。シリーズ1102は、各反復で収集されたRMSEのデータポイントの平滑化された曲線を表すことに留意されたい。
グラフ1150は、シリーズ1152を含むことが示されている。シリーズ1152は、AIモデルに関連付けられた損失が、いくつかの反復に基づいて、経時的にどのように変化するかを例示することができる。この場合、損失は、AIモデルの予測がどれほど不正確であるかを記述し、0の損失が、特定の予測が、実際の測定値に等しいことを示す。シリーズ1152及びシリーズ1102から明らかなように、オイル特性を予測するためのAIモデルの精度は、反復回数に基づいて増加する。
概して図12A~図12Cを参照すると、いくつかの実施形態による、図11A~図11Bの例示的な実験で訓練されたAIモデルのオイル特性予測を示すグラフが示される。例示的な実験では、AIモデルは、コンプレッサ速度、周囲温度、吐出温度、吸引圧力、吐出圧力、及びガス温度の入力を取り入れて、オイル粘度、コンプレッサ内のオイル量、及びアキュムレータのオイル量の予測された出力を生成した。
具体的に図12Aを参照すると、いくつかの実施形態による、コンプレッサのオイル量に関するAIモデルの予測を例示するグラフ1200が示される。グラフ1200は、経時的なコンプレッサ内の予測されたオイル量を例示するシリーズ1202を含むことが示される。いくつかの実施形態では、コンプレッサに関連付けられた動作決定の目的は、安定かつ信頼できる動作を確実にするために、コンプレッサ内のオイル量の比較的一定の値を維持することであり得る。
ここで図12Bを参照すると、いくつかの実施形態による、アキュムレータのオイル量に関するAIモデルの予測を例示するグラフ1210が示される。グラフ1210は、経時的なアキュムレータ内の予測されたオイル量を例示するシリーズ1212を含むことが示される。シリーズ1212の変化は、例えば、コンプレッサの動作の変化から生じ得る。具体的には、コンプレッサは、オイル/冷媒混合物のオイルが、アキュムレータによって集められるように分離されるオイル/冷媒混合物を提供出力し得、これは、シリーズ1212の予測された増加をもたらし得る。代替的に、コンプレッサは、アキュムレータからオイルを回収するように動作し得、これは、シリーズ1212の減少をもたらし得る。
ここで図12Cを参照すると、いくつかの実施形態による、オイルの粘度に関するAIモデルの予測を例示するグラフ1220が示される。オイルの粘度は、外部温度、コンプレッサがどのようにオイルを利用するかなどに応じて変化し得る。したがって、AIモデルは、オイルを利用するシステム全体がどのように変化するかに基づいて、オイル粘度が経時的にどのように変化するかを予測することができる。
VRFシステム管理のためのAIの活用
概して図13A~図24を参照すると、いくつかの実施形態による、VRFシステムの特性に関する予測を生成するためにAIを利用するためのシステム及び方法が示され、説明される。特に、以下に説明するシステム及び方法は、どのようにAIを利用して、VRFシステム内のコンプレッサの振動、VRFシステムにおける障害コンディション、及びコンプレッサ内のモータの効率を予測することができるかを例示する。AIの予測に基づいて、VRFシステム及び/又はその構成要素の任意の特性が、好ましい動作限界を超えて動作しているかどうかについて判定を行うことができる。本明細書で記載されるように、是正措置は、VRFシステムのいくつかの予測された特性、及び/又はその中の1つ以上の構成要素が、事前定義された許容範囲(例えば、事前定義された閾値)を超えていることに対処するために取られる任意の措置を指すことができる。例えば、AIモデルが、VRFシステムに対して障害コンディションが存在すると予測した場合、障害コンディションを修正するためのメンテナンスを自動的にスケジュールする是正措置が開始され得る。別の例として、AIが、コンプレッサの振動速度が、事前定義された最大閾値(例えば、1分当たりの最大動作サイクル数)を超えていると予測する場合、開始することができる是正措置は、コンプレッサに提供される入力電流を低下させること、及び/又はコンプレッサに一時的に無効にすることであり得る。
本明細書に記載されるように、「AI」という用語は、予測を生成するために使用される様々な異なるタイプのAIモデルを指すために使用され得る。特に、本明細書に記載のシステム及び方法は、ニューラルネットワークを活用して、VRFシステムに関連付けられた予測を生成し得る。例えば、長期短期メモリ(LSTM)ネットワークなどのリカレントニューラルネットワーク(RNN)を使用して、予測を生成し得る。LSTMの例示的な構造は、図25A及び図25Bを参照して以下でより詳細に説明する。もちろん、他のタイプのニューラルネットワーク及び/又は異なるAIモデルが、VRFシステムに関連付けられた予測を生成する際に利用されることができることを理解されたい。例えば、畳み込みニューラルネットワーク(CNN)、多層パーセプトロンなどを、予測を生成する際に利用することができる。いくつかの実施形態では、複数のAIモデルは、特定の予測を生成するために訓練され、既知のデータセットに対する予測の精度に対してテストすることができる。判定された各AIモデルの精度に基づいて、既知のデータセットに最も近い予測を生成するAIモデルを選択し、利用することができる。
以下でより詳細に説明されるように、予測を生成するために利用されるAIモデルは、様々な異なるデータソースに基づいて、訓練することができる。いくつかの実施形態では、AIモデルは、動作中の1つ以上のVRFシステムから集められた実データに基づいて、訓練されている。いくつかの実施形態では、AIモデルは、シミュレーションした環境に基づいて生成されたデータに基づいて、訓練されている。この場合、シミュレーションした環境は、動作中の実際のVRFシステムを模倣するように構成され得る。有利には、訓練データを生成するためのシミュレーションを使用すると、そうでなければ、動作中の実際のVRFシステムによって生成され得るよりも大きな訓練データのセットが生成され得る。いくつかの実施形態では、AIモデルは、シミュレーションによって生成された、実際のVRFシステムから集められた、及び/又は訓練データのいくつかの他のソースからの、訓練データの混合に基づいて、訓練されている。
AIモデルを利用して、VRFシステムに関連付けられた予測を生成することにより、VRFシステム内の問題を迅速に識別し、対処することができる。更に、AIモデルは、より深刻な問題(例えば、建物デバイスの完全な故障)になる前に、VRFシステム内の可能性のある問題を正確に識別するのに役立つことができる。このようにして、AIモデルはできる。
コンプレッサ振動予測
概して図13A~図18を参照すると、いくつかの実施形態による、VRFシステム内のコンプレッサの振動を管理するためのシステム及び方法が示され、説明される。しかしながら、以下の説明は、必ずしもVRFシステム内のコンプレッサに限定されるものではないことを理解されたい。以下に記載するシステム及び方法は、様々なシステム(例えば、異なるHVACシステム)内の様々な異なるコンプレッサ及び/又は異なる建物装置に適用することができる。
コンプレッサの振動は、コンプレッサの急速な劣化をもたらす可能性がある。振動の周波数及び/又は強度が増加するにつれて、コンプレッサは、メンテナンス及び/又はコンプレッサの完全な交換を必要とし得る、障害及び他の問題に対してますます影響を受けやすくなり得る。ただし、コンプレッサが、動作中に、ある程度振動するため、振動の完全な排除は現実的ではない場合がある。したがって、コンプレッサの動作は、負荷及び/又はVRFシステムの他の必要なニーズを満たしながら、振動を低減することとの間でバランスをとるべきである。
本明細書で言及されるように、「コンプレッサ」は、一般に、VRFシステムで利用することができる様々な異なるタイプのコンプレッサを指すために使用され得る。例えば、VRFシステムは、単一のロータリーコンプレッサ、ツインロータリーコンプレッサ、スクロールコンプレッサなどを含み得る。VRFシステムでは、コンプレッサは、インバータによって提供される交流(AC)に基づいて、動作され得る。具体的には、インバータは、コンプレッサに提供されるACの周波数を変更して、コンプレッサのモータが回転する速度を変更することができ、ACの振幅を変更して、モータによって印加されるトルクを変更することができる。
インバータによって提供されるACは、コンプレッサの動作に直接影響を与えるため、ACの特性(例えば、周波数及び/又は振幅)とコンプレッサの振動との間の相関関係を識別することができる。例えば、振動の周波数は、ACの周波数及び/又は強度(すなわち、振幅)が増加するにつれて、増加し得る。識別された関係に基づいて、AIモデルを、どの電流特性(例えば、振幅)の値が、加熱/冷却負荷及び/又はコンプレッサの他の要件を依然として満たしながら、低減された振動をもたらすことができるかを学習するように訓練することができる。いくつかの実施形態では、以下により詳細に説明されるように、AIモデルは、振動を管理(例えば、低減)するために、AC振幅の適切な値を予測して、モータによって印加されるトルクを修正するように具体的に訓練され得る。
いくつかの実施形態では、コンプレッサに対する適切な電流値を予測するために構成されたAIモデルは、振動の代用として、騒音を利用する。このようにして、AIモデルは、コンプレッサによって生成される騒音の量を低減する、コンプレッサに提供されるACの適切な振幅を予測するように訓練することができる。振動の代用として騒音を使用することは、騒音と振動との間の既知の関係の結果として適切であり得る。一般に、より大きな騒音は、増加した振動を示し得るが、より静かな騒音はより少ない振動を示し得る。より具体的には、デシベル(dB)とヘルツ(Hz)単位のコンプレッサの振動の周波数との間の関係が存在し得る。例えば、騒音の1dB増加は、振動周波数の1Hz増加と相関すると判定され得る。有利には、振動の代用として騒音を使用することは、振動を直接測定するためのセンサが、音を測定するためのセンサ(例えば、標準的なオーディオセンサ)と比較して、著しくより高価であり得るため、全体的なコストを低減し得る。
ここで図13Aを参照すると、いくつかの実施形態による、VRFシステム1300のブロック図が示される。理解されるように、図13Aに示されるように、VRFシステム1300は、コンプレッサを利用して、建物に加熱/冷却を提供する、より大きなVRFシステムの一部分を例示する。例えば、VRFシステム1300は、図6A及び図6Bを参照して説明されたVRFシステム600のサブシステムであり得る。
VRFシステム1300は、コンバータ1304及びインバータ1306を含むことが示されている。コンバータ1304は、交流(AC)電力を、AC電源(図示せず)から受け取ることができ、AC電力を、直流(DC)電力に変換することができる。コンバータ1304は、変換されたDC電力を、インバータ1306に提供することができる。インバータ1306は、受信したDC信号の周波数を変更し、AC信号をコンプレッサ1302に出力する、電子変調器であり得る。特に、インバータ1306は、出力されたAC信号が、コンプレッサ1302のモータ1308が、特定の速度及びトルクで動作することをもたらすように、AC信号の周波数及び/又は振幅を操作するように動作することができる。
いくつかの実施形態では、インバータ1306によって提供されるAC信号の周波数は、コンプレッサ1302を通過する流体の既知の量、及び/又はコンプレッサ1302を通過すると予想される流体の既知の量に関連する。AC信号の周波数は、流体の適切な量が、コンプレッサ1302を通って流れることを確保するために、モータ1308がどのくらい速く回転するべきか、及び/又は回転しているかを示すことができ、これは、毎分の回転で測定され得る。AC信号の周波数は、それによって、建物及び/又は他の対象物の加熱/冷却負荷に基づいて、判定され得る。例えば、建物に必要とされるより高い冷却負荷は、AC信号のより高い周波数をもたらし得、それによって、より多くの流体を、コンプレッサ1302を通過させるためにモータ1308がより速く回転することをもたらす。AC信号の周波数は、コントローラによって、インバータ1306自体によって、コンプレッサ1302からのフィードバックなどに基づいて、判定され得る。
どのような振幅(本明細書では強度とも称される)のAC信号を出力するかを判定するために、インバータ1306は、コンプレッサ振動コントローラ1310からAC振幅設定値を受信し得る。いくつかの実施形態では、コンプレッサ振動コントローラ1310は、AIモデルを利用して、コンプレッサ1302が、振動の結果として過度に速く劣化しないようにするために、どのような振幅値(例えば、ボルト単位)がモータ1308に提供されるべきかを予測する。受信されたAC振幅設定値に基づいて、インバータ1306は、上述の所望の周波数だけでなく、コンプレッサ振動コントローラ1310によって提供されるAC振幅設定値と一致する(又はほぼ一致する)AC信号をコンプレッサ1302に出力するように、コンバータ1304から受信されたDC信号を変調することができる。コンプレッサ振動コントローラ1310は、図16を参照して以下により詳細に説明される。
VRFシステム1300はまた、コンプレッサ1302を含むことが示される。コンプレッサ1302は、流体を圧縮するために使用される任意のタイプのコンプレッサ(例えば、単一ロータリーコンプレッサ、ツインロータリーコンプレッサ、スクロールコンプレッサなど)であり得る。コンプレッサ1302は、吸引配管を介して、流体(例えば、ガス)を取り込み、流体を圧縮し、吐出配管を介して、圧縮された流体を出力するように構成することができる。上述したように、コンプレッサ1302は、コンプレッサ1302の構成要素を駆動して、流体を圧縮し、流体を、コンプレッサ1302を通して移動させる、モータ1308を含み得る。モータ1308は、インバータ1306から受信したAC信号(電流)に基づいて、動作することができる。具体的には、AC信号の周波数は、モータ1308の動作速度に影響を与えることができる。
従来のシステムでは、インバータ1306によって提供される電流は、コンプレッサ1302の振動を考慮しない所定の停滞値であり得る。これらの従来のシステムは、コンプレッサ1302が、危険な周波数及び/又は強度で振動しているため、コンプレッサ1302が迅速に劣化することをもたらし得る。しかしながら、図16を参照して以下でより詳細に説明するように、コンプレッサ振動コントローラ1310は、コンプレッサ1302の振動を管理する(例えば、低減する)ことができるように、インバータ1306によって提供されるAC信号の振幅に対する適切な値を予測することができる。このようにして、インバータ1306は、コンプレッサ1302に、コンプレッサ1302の寿命を増加させるように、可能性のある振動に応じて判定される電流を、一貫して提供することができる。
ここで図13Bを参照すると、いくつかの実施形態による、VRFシステム1300のブロック図がより詳細に示される。モータ1308は、AC信号に基づいて動作する任意のタイプのモータであり得る。例えば、モータ1308は、単相電源に基づいて動作する単相モータであり得る。別の例として、かつ図13Bに示されるように、モータ1308は、三相電源に基づいて動作する三相モータであり得る。
図13Aを参照して上述したように、インバータ1306は、コンプレッサ振動コントローラ1310によって提供されるAC振幅設定値に基づいて、モータ1308に、AC信号を提供するように構成することができる。図13Bに示されるように、モータ1308に提供される信号は、位相A、B、及びCを含む三相信号であり得る。この場合、コンプレッサ振動コントローラ1310は、モータ1308を適切に動作させるために必要な三相信号に対する予測を生成し得る。位相A、B、及びCの各々は、それぞれ、特定の軸、すなわち、A軸、B軸、及びC軸に対応し得る。
いくつかの実施形態では、コンプレッサ1302は、AC信号とは対照的に、DC信号を受信し得る。この場合、インバータ1306は、VRFシステム1300の構成要素であり得るか、又はあり得ない。例えば、コンバータ1304は、モータ1308に提供する信号を変調するための、インバータ1306の機能性のいくつか及び/又は全てを含み得る。DC信号の強度は、モータ1308によって印加されるトルクに影響を与えるために、コンプレッサ振動コントローラ1310によって判定され、コンバータ1304に提供され得る。しかしながら、電気信号の周波数以外のいくつかの他の入力値に基づいて、モータ1308が判定され得る速度。例えば、モータ1308の回転速度は、コンプレッサ振動コントローラ1310及び/又はいくつかの他のコンピューティングデバイスによって、モータ1308に直接提供され得る。しかしながら、コンプレッサ1302/モータ1308は、説明を簡単にするため、及び明確さのために、インバータ1306からAC信号を受信するものとして本明細書に記載される。
図13Bは、モータ1308の直軸(d軸)及び横軸(q軸)を更に例示する。d軸及びq軸は、互いに対して常に90度の角度であり得る。いくつかの実施形態では、インバータ1306によって提供される三相電流は、d軸及びq軸に対して分離され得る。この場合、かつ図16を参照して以下により詳細に説明するように、コンプレッサ振動コントローラ1310は、d軸に対する第1の三相電流予測、及びq軸に対する第2の三相電流予測を生成し得る。このようにして、モータ1308は、受け取った流体を圧縮するように、適切に動作することができる。コンプレッサ振動コントローラ1310によって行われる軸方向電流の計算は、図14A~図14Cを参照して以下により詳細に説明する。
インバータ1306によって提供される三相電流信号は、位相A、B、及びCを含むことが示される。いくつかの実施形態では、コンプレッサ振動コントローラ1310は、各位相に対する適切な振幅値を予測するように構成されている。いくつかの実施形態では、コンプレッサ振動コントローラ1310は、位相A、B、及びCに適用される単一の振幅値を予測するように構成されている。各位相に適用される単一の振幅値を使用することは、3つの別個の振幅値を判定することと比較して、計算コストが低い場合があることを理解されたい。
ここで、図14A~図14Cを参照すると、いくつかの実施形態による、電流変換を例示するグラフのセットが示される。図14A~図14Cは、モータ(例えば、モータ1308)にどのような電流値を提供するかの予測を生成する際に、コンプレッサ振動コントローラ1310によって使用することができる電流間の関係を例示する。コンプレッサ振動コントローラ1310は、順方向及び逆方向のdq電流変換の両方を実行するように構成することができる。モータのd軸及びq軸は、それぞれ、電流値Idc及びIqcに関連付けることができる。順方向電流変換では、Idc及びIqcは、検出されたU相及びW相の観察された電流値Iuc及びIwcを、仮想回転座標dcqc軸上の値に変換することによって、判定することができる。
逆電流変換は、UVW電流捕捉処理で使用される、推定された電流値
を関連付けることができる。UVW電流捕捉処理は、仮想回転座標dcqc軸の値を逆変換して、
を判定することを含むことができる。V相電流
は、以下でより詳細に説明するように、キルヒホッフの法則を介して追加的に判定することができる。UVW電流捕捉処理では、電流検出コンディション設定処理で検出が無効になったときに、モータ電流情報を補償するために、I
u及びI
wを推定することができる。dcqc軸の値に基づいて、UVWに逆換算することによって、I
u及びI
wの推定された値I
uc及びI
wcを取得することができる。加えて、I
u、I
w推定の計算式に使用される、I
vcは、キルヒホッフの法則から取得することができる。
より具体的に図14Aを参照すると、いくつかの実施形態による、キルヒホッフの法則を例示するグラフ1400が示される。グラフ1400は、点aから発する電流Iv、Iu、及びIwを含むことが示されている。キルヒホッフの法則に従うと、点aにおける電流の和は、0である。したがって、キルヒホッフの法則は:
Iv=Iu-Iw
が当てはまる。
この関係は、図14A及び図14Bを参照して以下でより詳細に説明するように、順方向及び逆方向の電流変換の両方で使用することができる。
ここで図14Bを参照すると、いくつかの実施形態による、αβ変換を例示するグラフ1420が示される。順方向電流変換において、αβ変換は、コンプレッサ振動コントローラ1310によって、電流I
αc及びI
βcに対して実行することができる。αβ変換は、以下の式により表すことができる。
I
v=-I
u-I
wの関係が、コンプレッサ振動コントローラ1310によって上記の式に代入される場合、以下の関係を識別することができる。
式中、I
uc=I
u、及びI
wc=I
w。このようにして、キルヒホッフの法則を使用して、I
αc及びI
βcを取得することができる。
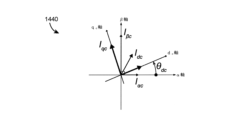
ここで図14Cを参照すると、いくつかの実施形態による、dq変換を例示するグラフ1440が示される。グラフ1440では、θ
dcは、固定座標α軸と仮想回転座標dc軸との間の角度を表すことができる。順方向電流変換において、dq変換は、I
dc及びI
qcが、I
αc及びI
βcを代入することによって取得することができる、以下の式で表すことができる。
Idc及びIqcの値は、フィルタリングされ、コンプレッサモータ(例えば、モータ1308)の制御のために使用されることができる。Idc及びIqcをフィルタリングするために、フィルタのフィルタ時定数(例えば、ミリ秒、秒など)は、モータの回転速度に従って切り替えることができる。いくつかの実施形態では、回転速度は、低速領域、中速領域、及び高速領域の3つの領域に分割される。例えば、低速領域は、毎分0~99の回転数(RPM)として定義され得、中速領域は、100~200RPMとして定義され得、高速領域は、200+RPMとして定義され得る。識別された回転速度に基づいて、フィルタ時定数は、観察された電流に応じて切り替えることができる。特に、フィルタ時定数は、低速領域において最大であり得、高速領域において最小であり得る。このようにして、回転速度が増加するにつれて、フィルタ時定数が減少して、電流のより粒度の高い分解能を取得することができる。
逆電流変換に関して、dq逆変換は、以下のdq逆変換方程式に基づいて、コンプレッサ振動コントローラ1310によって実行することができる。
このようにして、I
αc及びI
βcの値を取得することができる。コンプレッサ振動コントローラ1310は更に、以下の式を使用して、αβ逆変換を実行して、I
uc及びI
wcの値を取得することができる。
ここで図15を参照すると、いくつかの実施形態による、異なるタイプのコンプレッサに対する、クランク角度とトルクとの間のグラフ1500関係が示される。具体的には、グラフ1500は、クランク角とガス圧縮トルクとの間の関係を例示する。図13A及び図13Bを参照して上で詳細に説明したように、モータ(例えば、モータ1308)によって印加されるトルクは、コンプレッサの振動に影響を与えることができる。したがって、モータによって印加されるトルクは、コンプレッサの過度の振動が回避されるように、監視され、維持されるべきである。
グラフ1500は、シリーズ1502、シリーズ1504、及びシリーズ1506を含むことが示されている。シリーズ1502は、シングルロータリーコンプレッサのトルク測定値に関連付けられており、シリーズ1504は、ツインロータリーコンプレッサのトルク測定値に関連付けられており、シリーズ1506は、モータのクランク角に関するスクロールコンプレッサのトルク測定値全てに関連付けられている。グラフ1500に基づいて理解されるべきであるように、各タイプのコンプレッサは、クランク角とトルク(及びそれによって振動)との間に異なる関係を有し得る。例えば、シリーズ1502によって表されるシングルロータリーコンプレッサは、クランク角度に対して、高いピークトルクを有することが示されるが、一方、シリーズ1506によって表されるスクロールコンプレッサは、クランク角度とトルクとの間にほぼ一定の関係を有する。AIモデルの訓練プロセスの間、コンプレッサ振動コントローラ1310は、これらの関係を活用し、様々なタイプのコンプレッサに対する異なるAIモデルを生成することができる。
ここで図16を参照すると、いくつかの実施形態による、より詳細なコンプレッサ振動コントローラ1310のブロック図が示される。コンプレッサ振動コントローラ1310は、AIモデルを利用して、コンプレッサ1302(及び/又はいくつかの他のコンプレッサ)を動作させるために使用することができる電流の値に対する予測を生成し、振動によるコンプレッサ1302の劣化を低減するように構成することができる。コンプレッサ振動コントローラ1310は、様々な方法で実装することができる。いくつかの実施形態では、コンプレッサ振動コントローラ1310は、建物システムのローカルコントローラである。例えば、コンプレッサ振動コントローラ1310は、デスクトップコンピュータ、モバイルデバイス、サーモスタット、及び/又は建物にローカルないくつかの他のコンピューティングデバイス/システムに実装され得る。いくつかの実施形態では、コンプレッサ振動コントローラ1310は、VRFシステムの構成要素として実装され得る。例えば、コンプレッサ振動コントローラ1310は、図13Aを参照して説明されたインバータ1306の構成要素として実装され得る。この場合、インバータ1306自体は、コンプレッサ1302に提供するための電流の周波数を判定することができ得る。いくつかの実施形態では、コンプレッサ振動コントローラ1310は、クラウドコンピューティングシステムによるなど、いくつかの他のコンピューティングデバイス/システムを介して実装されている。
コンプレッサ振動コントローラ1310は、通信インターフェース1608及び処理回路1602を含むことが示されている。通信インターフェース1608は、様々なシステム、デバイス、又はネットワークとデータ通信を行うための、有線又は無線インターフェース(例えば、ジャック、アンテナ、伝送機、受信機、トランシーバ、有線端末など)を含み得る。例えば、通信インターフェース1608は、イーサネットベースの通信ネットワークを介してデータを送信及び受信するためのイーサネットカード及びポート、及び/又は無線通信ネットワークを介して通信するためのWi-Fiトランシーバを含み得る。通信インターフェース1608は、ローカルエリアネットワーク又はワイドエリアネットワーク(例えば、インターネット、建物WANなど)を介して通信するように構成され得、様々な通信プロトコル(例えば、BACnet、IP、LONなど)を使用し得る。
通信インターフェース1608は、コンプレッサ振動コントローラ1310と、様々な外部システム又はデバイス(例えば、インバータ1306、センサ1620、ユーザデバイス1622など)との間の電子データ通信を容易にするように構成されたネットワークインターフェースであり得る。例えば、コンプレッサ振動コントローラ1310は、通信インターフェース1608を介して、インバータ1306にAC振幅設定値を提供し得る。
処理回路1602は、プロセッサ1604及びメモリ1606を含むことが示されている。プロセッサ1604は、汎用若しくは特定目的プロセッサ、特定用途向け統合回路(ASIC)、1つ以上のフィールドプログラマブルゲートアレイ(FPGA)、処理構成要素のグループ、又は他の好適な処理構成要素であり得る。プロセッサ1604は、メモリ1606に記憶された、又は他のコンピュータ可読媒体(例えば、CDROM、ネットワーク記憶装置、リモートサーバなど)から受信された、コンピュータコード又は命令を実行するように構成され得る。
メモリ1606は、本開示に記載の様々なプロセスを完了及び/又は容易にするための、データ及び/又はコンピュータコードを記憶するための1つ以上のデバイス(例えば、メモリユニット、メモリデバイス、記憶デバイスなど)を含み得る。メモリ1606は、ランダムアクセスメモリ(RAM)、読み取り専用メモリ(ROM)、ハードドライブ記憶装置、一時記憶装置、不揮発性メモリ、フラッシュメモリ、光メモリ、又はソフトウェアオブジェクト及び/若しくはコンピュータ命令を記憶するための任意の他の好適なメモリを含み得る。メモリ1606は、データベース構成要素、オブジェクトコード構成要素、スクリプト構成要素、又は本開示に記載される様々な活動及び情報構造をサポートするための任意の他のタイプの情報構造を含み得る。メモリ1606は、処理回路1602を介して、プロセッサ1604に通信可能に接続され得、本明細書に記載の1つ以上のプロセスを(例えば、プロセッサ1604によって)実行するためのコンピュータコードを含み得る。いくつかの実施形態では、メモリ1606の1つ以上の構成要素は、単一の構成要素の一部である。しかしながら、メモリ1606の各構成要素は、説明を容易にするために、独立して示される。
メモリ1606は、訓練データ収集器1610を含むように示される。訓練データ収集器1610は、1つ以上の訓練データソース1618から、人工知能モデルを訓練するために使用される訓練データを収集することができる。具体的には、訓練データ収集器1610は、コンプレッサ1302の振動に関連付けられた訓練データを取得することができる。
訓練データ収集器1610によって収集される訓練データは、特定の入力とコンプレッサ1302の振動との間の関連付けを学習するように、AIモデルを訓練するために使用することができる任意の関連データを含むことができる。代替的又は追加的に、訓練データは、騒音が、振動の代用として使用される場合、特定の入力とコンプレッサ1302によって生成される騒音との間の関係を示す情報を含み得る。訓練データは、例えば、モータ1308のA軸とd軸との間の軸誤差、検出されたq軸電流、インバータ1306によって提供されるAC信号の周波数、コンプレッサ1302の付近の測定された騒音などを含む入力に対する値を含み得る。訓練データはまた、AIモデルが、入力と出力との間の関係を学習することができるように、電流特性(例えば、振幅)の値を含むことができる。
訓練データを集めるために、訓練データ収集器1610は、クエリを、訓練データソース1618に伝送して、訓練データを取得し得る。いくつかの実施形態では、訓練データ収集器1610は、訓練データを能動的に要求する必要なしに、訓練データソース1618から受動的に訓練データを受信し得る。訓練データソース1618は、訓練データ収集器1610に訓練データを記憶及び/又は提供することができる任意のデータソースを含むことができる。例えば、訓練データソース1618は、記憶された訓練データセットを、訓練データ収集器1610に提供することができるユーザデバイス(例えば、ラップトップ、デスクトップコンピュータ、モバイルデバイス、タブレットなど)であり得るか、又はそれを含み得る。別の例として、訓練データソース1618は、実際のVRFシステムの動作中に収集されたデータを記憶するデータベース(例えば、クラウドデータベース)であり得るか、又はそれを含み得る。このようにして、AIモデルは、動作中の実際のVRFデバイスから直接収集されたデータに基づいて、訓練することができる。
いくつかの実施形態では、訓練データ収集器1610は、1つ以上のシミュレーションモデルを利用して、モデルジェネレータ1612によって使用される訓練データのいくつか又は全てを生成して、AIモデルを生成する。シミュレーションモデル(本明細書では「シミュレーション」又は「シミュレーションフレームワーク」とも称される)は、実際のVRFシステムが、様々なコンディション及び制限(例えば、気象条件、加熱/冷却負荷、固有のデバイス制限など)下で、どのように動作し得るかをシミュレーションすることができる。シミュレーションモデルは、VRFシステムの構成要素間の関係、及び構成要素が、変化するコンディションにどのように反応し得るかを考慮することができる。例えば、シミュレーションモデルは、コンプレッサ1302が、特定の必要な加熱/冷却負荷を達成するために、どのように動作し得るか、及び結果としてコンプレッサ1302が、どのように振動するかをモデル化することができる。
シミュレーションモデルを利用することによって、訓練データ収集器1610は、訓練データソース1618から訓練データを取り出す必要がない場合があり、代わりに、コンプレッサ振動コントローラ1310内で訓練データを生成することができる。いくつかの実施形態では、シミュレーションモデルは、シミュレーションモデルを実行した結果として生成される訓練データを、コンプレッサ振動コントローラ1310に提供することができる、サードパーティコントローラ/デバイス/システム(例えば、クラウドコンピューティングシステム)によってホストされる。いずれの場合でも、シミュレーションモデルは、AIモデルを訓練するために使用することができる、様々な動作コンディションを表す様々な訓練データを生成するために、使用/実行することができる。
有利には、シミュレーションモデルは、動作中の実際のVRFシステムから訓練データを収集するのと比較して、より短い時間で大量のデータを生成することができる。このようにして、コンプレッサ1302は、より早い時間において、より短く、AIモデルの決定に基づいて動作することができ、これは、振動がより早く管理されるにつれて、コンプレッサ1302の寿命を増加させ得る。更に、シミュレーションモデルは、実際のVRFシステム動作中に頻繁には発生しない場合があるシナリオに対する訓練データを生成するために使用され得る。例えば、シミュレーションモデルは、実際のVRFシステムの標準動作中に頻繁には発生しない場合がある強烈な加熱/冷却負荷下で、コンプレッサ1302を動作させることを表す訓練データを生成することができる場合がある。このようにして、様々なケースを表す大量の訓練データは、生成され、モデルジェネレータ1612に利用可能にして、正確かつ代表的なモデルを生成することができる。
取得された訓練データに基づいて、訓練データ収集器1610は、収集された訓練データを、訓練データセットに組み合わせ、モデルジェネレータ1612に訓練データセットを提供することができる。訓練データセットに基づいて、モデルジェネレータ1612は、コンプレッサ1302の動作コンディションを記述する入力のセットと、コンプレッサ1302の振動を管理するためにコンプレッサ1302に提供することができるAC信号の振幅を記述する対応する出力との間の関係をモデル化するAIモデルを生成することができる。いくつかの実施形態では、モデルジェネレータ1612は、必要な加熱/冷却負荷を依然として満たしながら、コンプレッサ1302によって生成される騒音を低減するために、インバータ1306を介してモータ1308に提供することができるAC信号振幅を予測するように、AIモデルを訓練する。
モデルジェネレータ1612によって生成されるAIモデルは、任意の様々なAIモデルアーキテクチャのものであり得る。例えば、AIモデルは、LSTMネットワークなどのRNNであり得る。
モデルジェネレータ1612によって生成されたAIモデルへの入力は、コンプレッサ1302及び/又はモータ1308の動作に関連付けられた様々な入力を含むことができる。例えば、AIモデルへの入力は、モータ1308のd軸とA軸との間の軸誤差(軸方向差とも称される)、q軸電流検出値、モータ1308の回転速度を示すインバータ周波数、及び実際及び/又は必要な騒音レベルを含み得る。いくつかの実施形態では、モータ1308の回転速度(例えば、毎分回転数(RPM))は、インバータ周波数の代わりに、又はそれに加えて、入力として使用される。AIモデルの出力は、モータ1308によって印加されるトルクを管理するために、コンプレッサ1302に提供するAC信号の目標振幅値(例えば、ボルト単位、アンペア単位など)を入力することができる。モデルジェネレータ1612によって生成することができるAIモデルの例示的な例示は、図17A及び図17Bを参照して以下により詳細に説明する。
モデルジェネレータ1612は、様々な訓練技術を利用して、AIモデルを生成し得る。例えば、モデルジェネレータ1612は、運動量アプローチを伴う確率的勾配降下法、適応モーメント推定アプローチ、二乗平均平方根伝播アプローチなどを利用し得る。二乗平均平方根伝播アプローチに関して、モデルジェネレータ1612は、二乗平均平方根誤差(RMSE)を利用して、モデル予測が、訓練データ収集器1610によって提供された訓練データに対してどれだけ正確であるかを測定し得る。経時的にRMSEを監視するために、モデルジェネレータ1612は、以下の式を利用し得、
式中、Y
pred,tは、時間ステップtでの変数Yに対するAIモデルの先行予測であり、Y
test,tは、時間ステップtでの訓練データによって示される変数Yの実測値である。(Y
pred,t-Y
test,t)
2の計算は、各時間ステップt=1…nに対して実行することができ、nは、予測の総数である。次いで、各差を一緒に平均化することができる。訓練プロセスの間、モデルジェネレータ1612は、AIモデルを改良して、RMSEを低減することができる。
モデルジェネレータ1612は、生成されたAIモデルを、予測ジェネレータ1614に提供することができる。予測ジェネレータ1614は、AIモデルを使用して、コンプレッサ1302によって生成される振動の量及び/又は騒音を低減する、AC信号振幅の値に対する予測を生成することができる。当該予測を生成するために、予測ジェネレータ1614は、様々なソースから、AIモデルによって必要とされる入力の値を取得するように動作することができる。例えば、予測ジェネレータ1614は、センサ1620からの測定された変数、ユーザデバイス1622を介してユーザによって手動で観察された変数の値、及び/又は入力値の任意の他の適切なソースを取得し得る。AIモデルへの特定の入力に関して、モータ1308の回転速度は、ユーザによって観察され得、既知の周波数が、モータ1308に提供されることに基づいて、予測ジェネレータ1614によって指揮され計算され得、などであり得る。いくつかの実施形態では、モータ1308に小さな電流を提供し、かつモータ1308からのフィードバックを分析して、軸方向の差を推定することによって、モータ1308のA軸とd軸との間の軸方向の差は、観察者(例えば、ユーザ)によって推定される。いくつかの実施形態では、軸方向差は、センサ1620のうちのあるセンサによって測定される。しかしながら、軸方向差を測定するように構成されたセンサに関連付けられた価格のため、手動推定が好ましい場合がある。いくつかの実施形態では、コンプレッサ1302に関連付けられたq軸フィードバック電流は、センサ1620のうちのある電流センサを介して直接測定される。騒音に関して、実際の騒音レベルは、センサ1620のオーディオセンサを介して測定され得、及び/又はユーザによって推定され得る。AIモデルが入力として必要な騒音レベルを利用する場合、必要な騒音レベルは、ユーザデバイス1622を介してユーザによって提供され得、予測ジェネレータ1614(又はコンプレッサ振動コントローラ1310の別の構成要素)によって推定/判定され得、などであり得る。この場合、必要な騒音レベルは、コンプレッサ1302によって達成されるべき所定の騒音値(例えば、dB単位)を説明する。
モデルジェネレータ1612によって生成されたAIモデルに、入力の受信された値を渡した結果、予測ジェネレータ1614は、インバータ1306によってコンプレッサ1302に提供されたAC信号に対する振幅設定値を判定することができる。いくつかの実施形態では、AC振幅設定値は、d軸に対して提供される電流及びq軸に提供される電流の異なる振幅を含む。いくつかの実施形態では、単一のAC振幅設定値は、入力値をAIモデルに渡す結果として判定される。この場合、単一のAC振幅設定値は、d軸電流とq軸電流の両方に適用することができる。
いくつかの実施形態では、予測ジェネレータ1614は、AC振幅設定値を、(例えば、通信インターフェース1608を介して)インバータ1306に直接提供する。いくつかの実施形態では、予測ジェネレータ1614は、AC振幅設定値を、メモリ1606の是正措置ジェネレータ1616に提供する。是正措置ジェネレータ1616は、AC振幅設定値に基づいて、1つ以上の是正措置を生成及び開始するように構成することができる。いくつかの実施形態では、1つの是正措置は、AC振幅設定値を、インバータ1306に提供することである。この場合、是正措置ジェネレータ1616によって生成され、開始される是正措置は、AC振幅設定値を示す制御信号に基づいてインバータ1306を動作させることであり得る。このようにして、モータ1308によって印加されるトルクを調整することができる。いくつかの実施形態では、是正措置ジェネレータ1616によって生成され、開始され得る別の是正措置は、AC振幅設定値についてユーザに通知するように、通知をユーザデバイス1622に提供することである。当該通知は、異なるAC振幅が、振動にどのように影響を与えるかをユーザが理解することを可能にし得、建物装置(例えば、コンプレッサ1302)が、振動に起因する急速な劣化を回避することを確実にするために、ユーザが先制的な措置を講じることを可能にし得る。いくつかの実施形態では、是正措置ジェネレータ1616は、急速な劣化を回避するために必要とされるAC振幅設定値が、閾値を下回っており、それによって、建物の加熱/冷却負荷の履行を危うくすると判定することに応答して、例えば、コンプレッサ1302上のメンテナンスをスケジューリングするなどの他のタイプの是正措置を生成し、開始する。
ここで図17Aを参照すると、いくつかの実施形態による、コンプレッサモータに提供する電流の値を予測するためのニューラルネットワーク(NN)1700の例示が示される。NN1700は、図16を参照して説明されたように、モデルジェネレータ1612によって生成することができるAIモデルの例示的な構造を例示することができる。NN1700は、入力のセットに対応する、入力層内の入力ノードを含むように示される。具体的には、NN1700は、モータ1308のA軸とd軸との間の軸誤差の入力ノード、q軸電流検出値、インバータ1306によって出力されるAC信号の周波数を記述するインバータ周波数、及び実際の騒音レベルを含むことが示される。もちろん、これらの入力は、単に例のために提供されることを理解されたい。モデルジェネレータ1612は、コンプレッサの振動/騒音を推定するために使用することができる異なる入力を利用するAIモデルを生成することができる。出力に関して、NN1700は、d軸電流振幅及びq軸電流振幅に対しての別個の出力を含むことが示される。d軸及びq軸に対する別々の出力は、より正確に動作するコンプレッサ1302において有用であり得る。いくつかの実施形態では、NN1700は、d軸電流及びq軸電流の両方に適用することができる単一電流振幅値を出力する。単一の値を出力することは、NN1700の複雑さを低減し、それによって予測を生成するときの処理効率を改善し得る。
図16を参照して上述したように、軸誤差は、ユーザ及び/又はセンサによって測定され得、q軸電流検出値は、電流センサによって測定され得、インバータ周波数は、測定され得、既知の値などであり得る。実際の騒音レベルに関して、実際の騒音レベルは、コンプレッサ1302の事前定義された物理的近接性(例えば、コンプレッサ1302に物理的に取り付けられる、10フィート以内、1フィート以内など)を備えるオーディオセンサによって測定され得る。実際の騒音レベルに基づいて、NN1700は、コンプレッサ1302の振動を本質的に予測し、予測された振動に応じて振幅設定値を出力することができる。この場合、コンプレッサ1302の動作に関するフィードバックをNN1700に提供している。具体的には、騒音は、振動の代用として使用することができるため、NN1700は、コンプレッサ1302の振動を示す知識を効果的に取得している。このように、NN1700は、この情報を利用して、危険な動作コンディションを回避するAC信号振幅を予測することができる。例えば、比較的低い(例えば、<50dB、<20dBなど)の騒音レベルであれば、NN1700は、雑音レベルが比較的高い場合(例えば、>50dB、>100dB、>200dBなど)と比較して、より大きな振幅(例えば、ボルト又はアンペア単位)を出力し得る。このようにして、NN1700は、経時的に振幅の値を変更して、危険な動作コンディション及び振動を回避する、コンプレッサ1302に対する適切な動作コンディションを達成することができる。
ここで図17Bを参照すると、いくつかの実施形態による、コンプレッサモータに提供する電流の値を予測するためのニューラルネットワーク(NN)1750の例示が示される。いくつかの実施形態では、NN1750は、図17Aを参照して上述したように、NN1700に類似している、及び/又は同じである。したがって、NN1750は、図16を参照して説明されたモデルジェネレータ1612によって生成することができるAIモデルの別の例であり得る。図17Bに示されるように、NN1750は、NN1700の実際の騒音レベルと比較して、入力として、必要な騒音レベルを受信するように示される。必要な騒音レベルは、コンプレッサ1302によって生成された騒音の目標値であり得る。いくつかの実施形態では、必要な騒音レベルは、コンプレッサ1302によって生成される騒音が、閾値を下回るように、閾値として機能する。特に、必要な騒音レベルは、コンプレッサ1302を危険な動作コンディションに置かないように、(例えば、ユーザによって)判定される振動に関連付けられることが知られている騒音レベル(例えば、dB単位)であり得る。例えば、必要な騒音レベルは、30Hzのレートの下で、コンプレッサ1302の振動を維持することが期待される50dBであり得る。
必要な騒音レベルを入力として使用するために、NN1750は、騒音と振動との間の既知の相関関係に基づいて、訓練され得る。このようにして、NN1750は、既知の相関関係に対して、他の入力(例えば、コンプレッサ1302を通過する流体の量に関連付けられていることが知られているインバータ周波数)に基づいて、出力された電流振幅を調整することができる。いくつかの実施形態では、モデルジェネレータ1612は、実際の騒音レベル及び必要な騒音レベルの両方を入力として利用するAIモデルを生成する。
ここで図18を参照すると、いくつかの実施形態による、AIモデルを使用してコンプレッサに提供するAC信号振幅を予測するためのプロセス1800のフロー図が示される。AC信号振幅は、必要な加熱/冷却負荷、及び/又は建物の他の要件を満たしながらも、コンプレッサの振動の減少をもたらすと予測される振幅値(例えば、ボルト、アンペア単位など)であり得る。いくつかの実施形態では、AC信号の振幅は、コンプレッサのモータによって印加されるトルクに影響を与える。具体的には、増大する振幅は、モータによって印加されるトルクを増大させることに関連し得る。いくつかの実施形態では、プロセス1800のステップのいくつか及び/又は全ては、図13及び図16を参照して説明されたコンプレッサ振動コントローラ1310によって実行される。
プロセス1800は、コンプレッサの動作に影響を与えるコンディションと、コンプレッサによって生成される騒音との間の関係を記述する訓練データを取得することを含むことが示される(ステップ1802)。この場合、騒音は、コンプレッサの振動の代用として使用することができる。訓練データは、例えば、コンプレッサのモータのA軸とd軸との間の軸誤差、q軸電流検出値、インバータによって提供されるAC信号の周波数(これは、コンプレッサを通過する流体の量を表し得、それにより必要な加熱/冷却負荷を表し得る)、実際及び/又は必要な騒音レベル、騒音測定値などの値を含み得る。訓練データは、例えば、クラウドデータベース、建物にローカルなデータベース、ユーザ、建物内のセンサなどの1つ以上の訓練データソースから取得され得る。いくつかの実施形態では、ステップ1802は、訓練データ収集器1610によって実行される。
プロセス1800は、訓練データに基づいて、コンプレッサのモータによって印加されるトルクに影響を与えるAC信号の振幅を予測するためのAIモデルを訓練することを含むことが示されている(ステップ1804)。いくつかの実施形態では、より大きなAC信号振幅は、モータによって印加される増加したトルクに対応する。しかしながら、モータによって印加されるトルクが増加するにつれて、コンプレッサの振動は、増加し得、これは、コンプレッサによって出力される騒音の量に基づいて、測定され得る。ステップ1804で訓練されたAIモデルは、どのAC信号振幅が、入力値のセットに依存する特定の騒音レベルに対応するかを学習することができる。いくつかの実施形態では、AIモデルの目標は、どのAC信号振幅が、必要な加熱/冷却負荷を満たしながらも、コンプレッサによって出力される騒音を低減及び/又は最小限に抑えるかを学習することである。もちろん、動作のため、いくつかの騒音/振動は、避けられない場合もあるが、AIモデルは、建物のニーズを満たしながらも、装置の過度の劣化を回避する振幅を識別するように訓練することができる。いくつかの実施形態では、ステップ1804は、モデルジェネレータ1612によって実行される。
プロセス1800は、コンプレッサの動作に関連付けられたデータを取得することを含むことが示される(ステップ1806)。この場合、データは、ステップ1804で訓練されたAIモデルへの入力に関連付けられ得る。例えば、ステップ1806で取得されたデータは、コンプレッサに提供された、及び/又は提供されるAC信号の周波数、周囲温度、コンプレッサの付近の実際の騒音レベルなどを含み得る。データは、装置などからのフィードバックとして、例えば、ユーザ、センサなどの様々なソースから取得することができる。いくつかの実施形態では、ステップ1806は、予測ジェネレータ1614によって実行される。
プロセス1800は、AIモデルを使用して、取得されたデータに基づいて、AC振幅設定値を生成することを含むことが示されている(ステップ1808)。AIモデルは、必要な加熱/冷却負荷(及び/又は建物のいくつかの他の要件/ニーズ)が満たされ、コンプレッサによって生成される対応する騒音が低減されるように、AC振幅設定値を生成することができる。このようにして、モータは、不必要な劣化を回避しながら、一定量の流体を圧縮するように動作される。有利には、AIモデルを使用して、AC振幅設定値を生成することは、モータが不必要な量のトルクを印加する結果として、コンプレッサが、不必要な劣化を経験する状況の頻度を低減することができる。いくつかの実施形態では、AC振幅設定値は、モータのd軸及びq軸に対する別個の振幅設定値を含む。いくつかの実施形態では、ステップ1808は、予測ジェネレータ1614によって実行される。
プロセス1800は、モータを動作させるために、インバータにAC振幅設定値を提供することを含むことが示される(ステップ1810)。いくつかの実施形態では、インバータは、コンプレッサに提供される実際のAC信号を生成する。このようにして、インバータは、インバータによって出力されるAC信号が、AC振幅設定値に等しい(又はほぼ等しい)振幅を有するように、動作することができる。結果として、モータは、AC信号の振幅に応じてトルクを印加するように動作することができる。いくつかの実施形態では、ステップ1810は、予測ジェネレータ1614及び/又は是正措置ジェネレータ1616によって実行される。
VRFシステム障害コンディション予測
概して、図19~図22を参照すると、いくつかの実施形態による、VRFシステムの障害コンディションを予測するためのシステム及び方法が示され、説明される。障害コンディションは、コストを上昇させる可能性がある、及び/又はVRFシステムのいくつかの他の望ましくない特性をもたらす可能性がある任意の種類の障害を含むことができる。例えば、障害コンディションには、冷媒漏れ、室外ユニット霜降り、室内ファンの目詰まり、汚れた室内フィルタ、汚れた熱交換器、汚れた室外ファン、モータ消磁、コンプレッサオイル漏れなどが含まれ得る。障害コンディションは、VRFシステムに関連付けられたコスト(例えば、運用コスト)に影響を与える可能性のあるコンプレッサの不完全な効率をもたらし得る。
図19~図22を通してより詳細に説明されるように、AIモデルは、VRFシステムにおける構成要素の障害コンディションを予測するために使用され得る。特に、AIモデルは、VRFシステムのコンプレッサに関連付けられた障害コンディションを予測するために使用することができる。各異なる障害状況に対して、パーセンテージを使用して、故障がVRFシステムに影響を与える量を表すことができる。したがって、詳細な障害分類に対して2つのモデル(例えば、2つのRNN)があり得る。第1のモデルは、VRFシステム内に、もしあれば、どのような障害コンディションが存在するかを記述する障害分類を出力するように構成することができる。効果的に、第1のモデルは、VRFシステム及び/又はその構成要素が経験している障害(もしあれば)を判定/予測するように構成することができる。第2のモデルは、代表的なパーセンテージ及び/又はいくつかの他のメトリックを使用して、各障害コンディションの重大度を判定/予測するように構成することができる。障害の重大度は、障害がVRFシステムに及ぼす影響の程度を効果的に示すことができる。例えば、第2のモデルによる0.5(すなわち、50%)の冷媒漏れ指数の出力は、50%の冷媒が漏れを通して失われていることを示し得る。別の例として、第2のモデルによる0.9の室内ファン目詰まり指標の出力は、室内ファンが90%詰まっていることを示し得る。いくつかの実施形態では、第1のモデル及び第2のモデルは、単一のモデルに組み合わされる。この場合、単一のモデルは、VRFシステム内の障害コンディションを示す障害分類、及び各コンディションに関連付けられた重大度を表す対応するメトリックを出力し得る。いくつかの実施形態では、第2のモデルは、利用されない場合がある。この場合、第1のモデルによって生成される障害分類は、開始する是正措置を判定する際に利用される。言い換えると、第2のモデルが利用されない場合、障害分類に基づいて、及び障害がVRFシステムに影響を与える量に関係なく、是正措置が開始され得る。
理解されるべきであるように、図19~図22を通して以下に示され、説明されるシステム及び方法は、様々な建物システムに適用することができ、必ずしもVRFシステムに限定されない場合がある。例えば、システム及び方法は、同様に、建物の他のHVACシステムに適用することができる。
ここで図19を参照すると、いくつかの実施形態による、VRFシステム1900のブロック図が示される。VRFシステム1900は、AIモデルを適用して、障害分類の予測を生成することができる例示的なVRFシステムを例示することができる。特に、VRFシステム1900は、AIモデルを介して、障害分類を生成する際に使用され得る入力値のソースを例示することができる。いくつかの実施形態では、VRFシステム1900は、図6A及び図6Bを参照して説明されたVRFシステム600に類似する、及び/又は同じである。
VRFシステム1900は、室外ユニット(ODU)1902及び室内ユニット(IDU)1904を含むことが示されている。ODU1902は、コンプレッサ1906及び熱交換器1908を含むことが示されている。コンプレッサ1906は、コンプレッサ電源配管1914を介して、インバータから電流Iを受信することができる。Iinverterは、例えば、ACなどの任意のタイプの電力信号であり得る。Iinverterは、コンプレッサ1906に動力を供給することができる。いくつかの実施形態では、コンプレッサ1906は、図13A~図18を参照して上でより詳細に説明したように、Iinverterの周波数及び振幅に応じてモータを動作させる。
コンプレッサ1906はまた、熱交換器1908から流体(例えば、冷媒)を受け入れることができる。流体を取得するために、コンプレッサ1906は、吸引配管1922を介して、熱交換器1908から流体を吸引することができる。流体の吸引は、パスカルなどの好適な圧力メトリックで測定され得る吸引圧力Psに関連付けることができる。いくつかの実施形態では、Psは、吸引配管1922に関連付けられた圧力センサによって測定される。
吸引配管1922を介して流体を吸引する結果として、コンプレッサ1906は、流体を圧縮し、吐出配管1916を介して、IDU1904に、圧縮された流体を出力することができる。吐出配管1916を介した流体の出力は、吐出圧力Pd及び吐出温度Tdに関連付けることができる。いくつかの実施形態では、Pd及びTdは、それぞれ、吐出配管1916に関連付けられた、圧力センサ及び温度センサによって測定される。
IDU1904のファン1912は、吐出配管1916を介して、圧縮された流体(例えば、圧縮された冷媒)、及び室内ファン電源配管1918を介して、室内ファン電流Ifan,iを受け取ることができる。圧縮された流体を使用して、ファン1912は、空間に加熱/冷却を提供するように動作することができる。具体的には、圧縮された流体によって放出される熱は、ファン1912を使用して、空間に押し込むことができる。いくつかの実施形態では、IDU1904は、空間内の様々な場所に加熱/冷却を提供する複数のファン1912を含む。
IDU1904は、戻り配管1920を介して、ODU1902に戻して、流体を再循環させることができる。具体的には、流体は、熱交換器1908に戻すことができる。室外ファン電源配管1924を介して、室外ファン電流Ifan,oによって電力供給されるファン1910は、熱交換器1908に空気を提供することができる。このようにして、いくつかの熱は、流体から外部空間に放散され得る。最後に、流体は、吸引配管1922を介して、コンプレッサ1906に戻され得る。
VRFシステム1900に示され、かつ上述のような変数(例えば、Ifan,i、Ps、Pd、Tdなど)は、配管1914~1924に取り付けられた、それらの内部にある、又はそうでなければそれらに関連付けられたそれぞれのセンサによって測定することができる。当該変数の測定値は、AIモデルを利用して、VRFシステム1900に関連付けられた障害を識別するコントローラに戻すことができる。例えば、変数は、図20を参照して以下で詳細に説明するように、VRF障害コントローラ2000に提供され得る。理解されるべきであるように、図19に示される変数及び構成要素は、単に例のために提供される。VRFシステム1900は、図19に示されるようなものとは異なる構成要素を含み得る。同様に、図19に示されるもの以外の変数又はそれに加えて、変数は、コントローラに提供され得る。
ここで図20を参照すると、いくつかの実施形態による、VRFシステムにおける障害を予測するためのVRF障害コントローラ2000のブロック図が示される。VRF障害コントローラ2000を使用して、VRFシステム(例えば、図16を参照して説明されたVRFシステム600、図19を参照して説明されたVRFシステム1900など)に関連付けられた障害に関する予測を生成することができる。VRF障害コントローラ2000は、1つ以上のAIモデルを利用して、障害分類、及び障害分類によって識別される障害コンディションの対応する重大度を生成することができる。いくつかの実施形態では、VRF障害コントローラ2000は、単一のコントローラとして、本明細書に記載される他のコントローラと統合される。例えば、VRF障害コントローラ2000の機能性は、図8を参照して説明されたオイル管理コントローラ800、及び/又は図16を参照して説明されたコンプレッサ振動コントローラ1310と統合され得る。
VRF障害コントローラ2000は、通信インターフェース2008及び処理回路2002を含むことが示されている。通信インターフェース2008は、様々なシステム、デバイス、又はネットワークとデータ通信を行うための、有線又は無線インターフェース(例えば、ジャック、アンテナ、伝送機、受信機、トランシーバ、有線端末など)を含み得る。例えば、通信インターフェース2008は、イーサネットベースの通信ネットワークを介してデータを送信及び受信するためのイーサネットカード及びポート、及び/又は無線通信ネットワークを介して通信するためのWi-Fiトランシーバを含み得る。通信インターフェース2008は、ローカルエリアネットワーク又はワイドエリアネットワーク(例えば、インターネット、建物WANなど)を介して通信するように構成され得、様々な通信プロトコル(例えば、BACnet、IP、LONなど)を使用し得る。
通信インターフェース2008は、VRF障害コントローラ2000と、様々な外部システム又はデバイス(例えば、訓練データソース2018、センサ2020、ユーザデバイス2024など)との間の電子データ通信を容易にするように構成されたネットワークインターフェースであり得る。例えば、VRF障害コントローラ2000は、通信インターフェース2008を介して、装置2022の障害分類を記述する通知を、ユーザデバイス2024に提供し得る。
処理回路2002は、プロセッサ2004及びメモリ2006を含むことが示されている。プロセッサ2004は、汎用若しくは特定目的プロセッサ、特定用途向け統合回路(ASIC)、1つ以上のフィールドプログラマブルゲートアレイ(FPGA)、処理構成要素のグループ、又は他の好適な処理構成要素であり得る。プロセッサ2004は、メモリ2006に記憶された、又は他のコンピュータ可読媒体(例えば、CDROM、ネットワーク記憶装置、リモートサーバなど)から受信された、コンピュータコード又は命令を実行するように構成され得る。
メモリ2006は、本開示に記載の様々なプロセスを完了及び/又は容易にするための、データ及び/又はコンピュータコードを記憶するための1つ以上のデバイス(例えば、メモリユニット、メモリデバイス、記憶デバイスなど)を含み得る。メモリ2006は、ランダムアクセスメモリ(RAM)、読み取り専用メモリ(ROM)、ハードドライブ記憶装置、一時記憶装置、不揮発性メモリ、フラッシュメモリ、光メモリ、又はソフトウェアオブジェクト及び/若しくはコンピュータ命令を記憶するための任意の他の好適なメモリを含み得る。メモリ2006は、データベース構成要素、オブジェクトコード構成要素、スクリプト構成要素、又は本開示に記載される様々な活動及び情報構造をサポートするための任意の他のタイプの情報構造を含み得る。メモリ2006は、処理回路2002を介して、プロセッサ2004に通信可能に接続され得、本明細書に記載の1つ以上のプロセスを(例えば、プロセッサ2004によって)実行するためのコンピュータコードを含み得る。いくつかの実施形態では、メモリ2006の1つ以上の構成要素は、単一の構成要素の一部である。しかしながら、メモリ2006の各構成要素は、説明を容易にするために、独立して示される。
メモリ2006は、訓練データ収集器2010を含むように示される。いくつかの実施形態では、訓練データ収集器2010は、図16を参照して説明された訓練データ収集器1610に類似する、及び/又は同じである。訓練データ収集器2010は、訓練データソース2018からAIモデルの訓練に使用するための訓練データを取得するように構成することができる。訓練データソース2018は、VRF障害コントローラ2000に訓練データを提供することができる様々なソースを含むことができる。例えば、訓練データソース2018は、クラウドデータベース、建物のオンサイトデータベース、ユーザデバイス、建物装置などを含み得る。いくつかの実施形態では、訓練データソース2018は、訓練データソース1618と類似する、及び/又は同じである。
訓練データ収集器2010によって収集された訓練データは、どのような障害が、VRFシステムに存在する可能性があるか、及びいくつかの場合においては、当該障害の重大度(例えば、問題が存在しないことを表す0%、及び壊滅的な障害を表す100%を備える、障害のパーセンテージ値)を予測するようにAIモデルを訓練するために関連する任意の情報を含むことができる。例えば、訓練データには、コンプレッサ速度、周囲温度、吐出温度、吸引圧力、吐出圧力、室内ファンモード及びVRFモード(例えば、加熱又は冷却)、室外ファンステップなどの値が含まれ得る。訓練データには、値に関連付けられた障害分類も含まれ得る。この場合、障害分類は、値に応じてユーザ(例えば、メンテナンス要員、建物所有者など)によって訓練データに入力され得る。代替的又は追加的に、障害分類は、特定のデバイスが、故障したとき、及び/又はそうでなければ障害状態にあるときを示す装置フィードバックに基づいて、訓練データに自動的に入力され得る。いくつかの実施形態では、障害分類は、いくつかの他の障害分類のソースを介して、訓練データに入力される。
いくつかの実施形態では、訓練データ収集器2010は、シミュレーションフレームワークを利用して、1つ以上のAIモデルを訓練するために必要な訓練データのいくつか及び/又は全てを生成する。この場合、シミュレーションフレームワークは、VRFシステムの閉ループ機能モックアップユニット(FMU)モデルを使用することによって、VRFシステムの動作を表すテストケースのシミュレーションを実行することができる。シミュレーションフレームワークは、デバイスが経時的にどのように劣化するか、及びその結果としてどのような障害が生じ得るかをモデル化することができる。シミュレーションフレームワークは、様々な異なる負荷に対して、様々な期間にわたって、異なる装置などで実行することができる。このようにして、VRFシステム内の障害を識別する方法を学ぶように、AIモデルを訓練する際に使用することができる訓練データの包括的な収集を取得することができる。有利には、シミュレーションフレームワークは、AIモデルが、VRFシステム内のダイナミクスを正確にモデル化するのに十分な訓練データを有し、その結果、建物デバイスがどのように影響を受けるかを確実にすることができる。シミュレーション訓練データは、訓練データソース2018から集められた訓練データの代わりに、又はそれに加えて使用することができる。
訓練データ収集器2010は、収集された訓練データを、訓練データセットとして、モデルジェネレータ2012に提供することができる。いくつかの実施形態では、モデルジェネレータ2012は、図16を参照して説明されたモデルジェネレータ1612に類似している、及び/又は同じである。モデルジェネレータ2012は、訓練データ収集器2010から取得される訓練データを利用して、障害コンディションの特性を予測するための1つ以上のAIモデルを訓練することができる。具体的には、モデルジェネレータ2012は、第1のAIモデルを訓練して、VRFシステムの動作を記述する入力のセットに応じて障害分類を出力し、第2のAIモデルを訓練して、VRFシステム上に有する、第1のAIモデルによって識別された障害の重大度(例えば、パーセンテージ値)を出力し得る。いくつかの実施形態では、モデルジェネレータ2012は、障害分類、及び障害分類で識別された各障害コンディションの対応する重大度を出力する単一のAIモデルを生成する。いくつかの実施形態では、モデルジェネレータ2012は、障害分類のみを出力する単一のAIモデルを生成する。障害分類を出力するAIモデルの例は、図21を参照して以下により詳細に説明する。
1つ以上のAIモデルによって出力される障害分類は、VRFシステム内の障害を記述することができる。例えば、障害分類は、「冷媒漏れ」、「室内ファン目詰まり」、「室外ユニット霜降り」、「汚れた室内フィルタ」、「汚れた熱交換器」、「汚れた室外ファン」、「モータ消磁」、「コンプレッサオイル漏れ」、「コンプレッサの不完全な効率」などのテキスト文字列を含み得る。別の例として、障害分類は、特定の障害コンディションが存在するかどうかを表すバイナリ変数(例えば、0又は1)を使用して、特定の障害コンディションの存在を示し得る。障害分類は、VRFシステムを記述する入力に基づいて、1つ以上のAIモデルによって予測することができる。具体的には、1つ以上のAIモデルは、コンプレッサ速度、周囲温度、吐出温度、吸引圧力、吐出圧力、室内ファンモード、室外ファンステップなどの入力変数の値と、障害分類に対応することとの相関関係を学習し得る。特定の例として、AIモデルは、訓練データに基づいて、吸引圧力が、特定の閾値(例えば、20ポンド毎平方インチ(PSI)、30PSIなど)を超える場合、VRFシステム内に冷媒漏れがあり得ることを学習し得る。AIモデルは、どれくらいの冷媒が、VRFシステムから漏れているかのパーセンテージ値を予測するように更に構成され得る。例では、AIモデルは、コンプレッサ速度、吐出温度などの入力に基づいて、漏れにより冷媒の50%が失われていることを予測し得る。
モデルジェネレータ2012によって生成される1つ以上のAIモデルは、任意のタイプのAIモデルであり得る。例えば、1つ以上のAIモデルは、RNN(例えば、LSTMモデル)、畳み込みニューラルネットワーク、多層パーセプトロン、フィードフォワードニューラルネットワークなどであり得る。特に、1つ以上のAIモデルは、RNNの高速及び信頼性のためにRNNであり得る。より具体的には、LSTMは、時系列データのシーケンス全体を処理し、予測を行うLSTMの能力に起因して、時系列内の重要なイベント間の未知の持続時間のラグがあっても利用され得る。具体的な例の構造として、モデルジェネレータ2012によって生成されるAIモデルのうちの1つは、1つのシーケンス入力層、1つの双方向LSTM層、1つの全結合層、1つのソフトマックス層、及び1つの分類層を有し得る。このようにして、AIモデルは、障害分類を生成するために使用することができ、時系列又はシーケンスデータの時間ステップ間の双方向の長期依存性を学習することができる。これらの依存性は、ネットワークが、各時間ステップの完全な時系列から学習するのに有用である。
いくつかの実施形態では、モデルジェネレータ2012は、各障害コンディションに対する個々のAIモデルを生成する。この場合、各AIモデルは、特定の障害コンディションが、VRFシステムに存在するかどうかを予測するように訓練することができる。個々のAIモデルを生成することは、特定の障害コンディションが存在するかどうかを予測するための向上精度であり得る。特に、個々のAIモデルを生成することは、モデルの生成に影響を与える可能性のある複数の障害コンディションに対する重複データを回避することができる。いくつかの実施形態では、モデルジェネレータ2012が、障害コンディションに対して個々のAIモデルを生成する場合、モデルジェネレータ2012は、各個々のモデルを組み合わせて、複数の障害コンディションを考慮する複合AIモデルを生成し得る。
モデルジェネレータ2012は、1つ以上の生成されたAIモデルを、予測ジェネレータ2014に提供することができる。いくつかの実施形態では、予測ジェネレータ2014は、予測ジェネレータ1614に類似している、及び/又は同じである。1つ以上のAIモデルを使用して、予測ジェネレータ2014は、もしあれば、VRFシステムに影響を与えている障害コンディションの予測、及びいくつかの実施形態では、障害コンディションの重大度を生成することができる。予測を生成するために、予測ジェネレータ2014は、1つ以上のAIモデルによって必要とされる値入力を取得することができる。具体的には、予測ジェネレータ2014は、センサ2020から、測定された変数を取得し、装置2022から装置フィードバックを取得し得る。センサ2020は、VRFシステムの特定の特性を測定するように構成された1つ以上のセンサを含むことができる。例えば、センサ2020は、Pd、Ps、Td、周囲温度などの値を測定する温度センサ、圧力センサなどを含み得る。装置2022は、VRFシステムの任意の装置を含むことができる。例えば、装置2022は、ODU、IDUなどを含み得る。装置フィードバックは、例えば、室内ファンモード、室外ファンステップ、コンプレッサ速度、吐出温度、吸引圧力など、1つ以上のAIモデルによって必要とされる入力を含み得る。いくつかの実施形態では、センサ2020は、装置2022の構成要素であり、及び/又はそうでなければ装置2022に関連付けられている。
予測ジェネレータ2014は、1つ以上のAIモデルに、入力の受信された値を渡して、VRFシステムの障害特性に関連付けられた予測を生成することができる。予測ジェネレータ2014は、是正措置ジェネレータ2016に当該予測を提供することができる。是正措置ジェネレータ2016は、予測に含まれる障害分類、及び障害コンディションの重大度によって示される障害コンディションに応じて様々な異なる是正措置を開始するように構成することができる。是正措置ジェネレータ2016によって開始される是正措置は、予測で識別された障害コンディションのうちの1つ以上を解決するための任意の適切な措置を含むことができる。例えば、是正措置は、ユーザデバイス2024に通知を提供すること、制御信号を生成し、装置2022に提供すること、装置2022のいくつかのVRFデバイスを一時的に無効にすること、装置2022のメンテナンスをスケジュールすることなどによって、障害コンディションについてユーザに通知することを含み得る。
いくつかの実施形態では、是正措置ジェネレータ2016によって開始される是正措置は、予測に含まれる障害分類、及び各障害の重大度に基づいている。いくつかの障害コンディションは、より高いコスト(例えば、$)に関連付けられる是正措置を必要とする場合があり、他の是正措置と比較して、メンテナンス技術者などのより多くの時間を必要とする場合がある。例えば、特定の建物デバイス(例えば、IDU)のメンテナンスをスケジュールすることは、ユーザデバイス2024に通知を提供することと比較して、より高い関連付けられたコストを有し得る。したがって、是正措置ジェネレータ2016は、特定の障害コンディションが、VRFシステムに及ぼし得る影響を判定し、判定された影響に応じて是正措置を開始し得る。例えば、予測ジェネレータ2014から受信された予測に含まれる障害分類が、室内ファンフィルタが50%目詰まりしていることを示す場合、是正措置ジェネレータ2016は、VRFシステムへの影響が低いと判定し得、目詰まりに関してユーザデバイス2024を介してユーザに通知するための是正措置を開始し得る。しかしながら、障害分類が、VRFシステムのコンプレッサが90%非効率であることを示す場合、是正措置ジェネレータ2016は、コンプレッサの非効率性が運用コストに高い影響を与えると判定し、それによって、コンプレッサのメンテナンス及び/又は交換を実行するための是正措置を開始し得る。
どのような是正措置を開始するかを判定するために、是正措置ジェネレータ2016は、対応する重大度を備える障害コンディションと、特定の是正措置との間のマッピングを利用し得る。特に、重大度が、0%が、VRFシステムへの影響がないことを示し、100%が、VRFシステムへの深刻な影響を示す、パーセンテージとして与えられた場合、是正措置ジェネレータ2016は、重大度の境界に基づいて特定の是正措置を開始し得る。いくつかの実施形態では、単一の障害コンディションに対して複数の是正措置が開始される。どのような是正措置を開始するかを判定するために利用することができる決定木の例を以下の
表2に提供する。
是正措置が開始された場合、存在すると予測される障害コンディションに対処することができる。1つ以上のAIモデルを利用して、特定の障害コンディション及び対応する重大度を示す障害分類を予測することによって、1つ以上のAIモデルによって予測された特定の障害に対処するために適切な是正措置を開始することができる。有利には、特定の障害に対処するために開始された是正措置は、障害の推定された重大度に応じ得る。このようにして、VRFシステムに低い影響を与える障害に対して、高価かつ/又は時間のかかる是正措置を回避することができる。
ここで図21を参照すると、いくつかの実施形態による、VRFシステムの障害分類を予測するためのニューラルネットワーク(NN)2100の例示が示される。NN2100は、図20を参照して説明されたモデルジェネレータ2012によって生成することができるAIモデルの例示的な構造を例示することができる。具体的には、NN2100は、障害分類予測のためのRNN構造を表すことができる。
NN2100は、入力のセットに対応する、入力層内の入力ノードを含むように示される。NN1700は、コンプレッサ速度、周囲温度、吐出温度、吸引圧力、吐出圧力、室内ファンモード、及び室外ファンステップの入力ノードを含むことが示されている。理解されるべきであるように、NN2100に示される入力は、単に例のために提供される。NN2100への入力は、どのような測定値がVRFシステムから集められ得るか、どのような測定値が障害分類を生成することに関連するかなどに基づいて変更することができる。
NN2100の出力は、VRFシステム内に存在し得る特定の障害を識別する障害分類を含むことができる。例えば、NN2100は、冷媒漏れ、室内ファンの目詰まり、室外ユニットの霜降り、汚れた室内フィルタ、汚れた熱交換器、汚れた室外ファン、モータ消磁、コンプレッサオイル漏れ、コンプレッサの不完全な効率などの障害コンディションを識別し得る。入力と同様に、NN2100によって出力することができる障害分類を変更することができる。NN2100によって出力することができる障害分類は、ユーザ好み、システム内のデバイス、どのような入力がNN2100に利用可能であるかなどに応じて調整することができる。具体的には、障害分類は、障害コンディションの特定のセットがVRFシステム内に存在するかどうかのみを示すように調整することができる。
ここで図22を参照すると、いくつかの実施形態による、AIモデルを使用して、VRFシステムの障害分類を予測するためのプロセス2200のフロー図が示される。いくつかの実施形態では、プロセス2200のいくつか及び/又は全てのステップは、VRF障害コントローラ2000によって実行される。
プロセス2200は、VRFシステムの動作コンディション及びVRFシステムの障害コンディションに関連付けられた訓練データを取得することを含むことが示される(ステップ2202)。訓練データは、例えば、クラウドデータベースなどの様々なソースから、ユーザ、装置フィードバックなどから直接取得することができる。訓練データに含まれる動作コンディションは、例えば、Td、Pd、Ps、周囲温度、コンプレッサ速度、室外ファンステップ(すなわち、室外ファン速度)、室内ファン速度、及びVRFモード(例えば、加熱又は冷却)などの変数の値を含み得る。訓練データに含まれる障害コンディションは、VRFシステムによって経験され得る任意の種類の障害コンディションを含み得る。例えば、障害コンディションは、冷媒漏れ、室内ファンの目詰まり、室外ユニットの霜降り、汚れた室内フィルタ、汚れた熱交換器、汚れた室外ファン、モータ消磁、コンプレッサオイル漏れ、コンプレッサの不完全な効率などを含み得る。いくつかの実施形態では、訓練データに含まれる各障害コンディションはまた、推定された重大度(例えば、パーセンテージ値、1~10スケールの値など)を含む。推定された重大度は、訓練データなどによって示される、変化する動作コスト基づいて、ユーザによって自動的に手動で推定され得る。いくつかの実施形態では、訓練データは、動作コンディションの変化と、特定の障害コンディションとの間の関係が、識別することができるように、時系列データである。いくつかの実施形態では、ステップ2202は、訓練データ収集器2010によって実行される。
プロセス2200は、訓練データに基づいて、VRFシステムの障害分類を予測するための訓練AIモデルを含むことが示されている(ステップ2204)。ステップ2204で訓練されたAIモデルは、RNNなどの任意のタイプのAIモデルであり得る。AIモデルによって予測される障害分類は、VRFシステム内に1つ以上の障害コンディションが存在するかどうか、及び任意の既存の障害の対応する重大度を示すことができる。いくつかの実施形態では、第1のAIモデルが、入力データに基づいて、もしあれば、どのような障害コンディションが存在するかを示す障害分類が存在するかを予測し、第2のAIモデルが、存在する障害コンディションの重大度を予測するように、2つのAIモデルがステップ2204で訓練される。ステップ2204で生成することができるAIモデルの例は、図21を参照して上記で説明される。いくつかの実施形態では、ステップ2204は、モデルジェネレータ2012によって実行される。
プロセス2200は、VRFシステムの動作に関連付けられたデータを取得することを含むことが示される(ステップ2206)。ステップ2206で取得されたデータは、ステップ2204で生成された1つ以上のAIモデルによって必要とされる入力の値を含むことができる。例えば、データには、Td、Pd、Ps、周囲温度、コンプレッサ速度、室外ファンステップ、室内ファン速度、及びVRFモードの値が含まれ得る。データは、センサ、装置フィードバックなどの様々なソース、ユーザなどから取得することができる。いくつかの実施形態では、ステップ2206は、予測ジェネレータ2014によって実行される。
プロセス2200は、取得されたデータに基づいて、VRFシステムの障害分類を予測するためにAIモデルを使用することを含むことが示されている(ステップ2208)。障害分類は、もしあれば、どのような障害コンディションが、VRFシステム内に存在すると識別されるかを示すことができる。障害分類は、例えば、既存の障害コンディションのテキスト文字列を含むことによって、特定の障害コンディションの存在又は非存在を示すバイナリ変数の配列を含むことによってなど、任意の適切な方法を通じて、既存の障害コンディションを示し得る。いくつかの実施形態では、ステップ2208はまた、AIモデル(又は第2のAIモデル)を使用して、取得されたデータに基づいて、各既存の障害コンディションの重大度を予測することを含む。いくつかの実施形態では、ステップ2208は、予測ジェネレータ2014によって実行される。
プロセス2200は、AIモデルによって出力された障害分類に基づいて、是正措置を判定することを含むことが示される(ステップ2210)。いくつかの実施形態では、是正措置は、もしあれば、どのような障害コンディションが、障害分類によって識別されるかに基づいて判定される。いくつかの実施形態では、是正措置は、障害分類によって識別される各障害コンディションの示された重大度に基づいて更に判定される。是正措置は、障害分類によって示された障害コンディションに対処する任意の措置を含むことができる。例えば、是正措置は、識別された障害コンディション及び対応する重大度に関してユーザに通知すること、VRF装置のメンテナンス/交換をスケジュールすること、VRF装置に制御信号を生成及び伝送すること、障害コンディション及び対応する重大度をデータベースに記録することなどを含み得る。いくつかの実施形態では、ステップ2210で、複数の是正措置が判定される。いくつかの実施形態では、ステップ2210は、是正措置ジェネレータ2016によって実行される。
プロセス2200は、是正措置を開始することを含むことが示される(ステップ2212)。ステップ2212は、是正措置が正常に実行されることを確実にするために必要な任意のステップ/プロセスを実行することを含むことができる。例えば、是正措置が、ユーザに通知することである場合、ステップ2412は、通知を生成することと、通信インターフェースを使用して、通知を通信することと、を含み得る。別の例として、是正措置が、VRFデバイスを無効にすることである場合、ステップ2412は、VRFデバイスをオフにする制御信号を生成することと、制御信号をVRFデバイスに提供することと、を含み得る。いくつかの実施形態では、ステップ2212は、是正措置ジェネレータ2016によって実行される。
モータ効率予測
概して図23~図24を参照すると、いくつかの実施形態による、AIモデルを使用して、VRFシステム内のモータの効率を予測するためのシステム及び方法が示され、説明される。いくつかの実施形態では、以下に記載されるシステム及び方法は、図8~図22を通じて上述されたシステム及び方法のいずれか及び/又は全てと統合することができる。
コンプレッサのためのモータの効率は、モータの入力電力及び出力電力に基づいて、定義することができる。具体的には、モータ効率η
motorは、以下の式で与えられることができる。
式中、φ
out,motorは、モータの出力電力であり、φ
in,motorは、モータの入力電力である。いくつかの実施形態では、モータは、インバータから、受信された信号に基づいて電力供給される。インバータη
inverterの効率も判定されることができ、以下の式に基づいて定義することができる。
式中、φ
out,inverterは、インバータの出力電力であり、φ
in,inverterは、インバータの入力電力である。この場合、インバータの出力電力は、モータの入力電力(すなわち、φ
out,inverter=φ
in,motor)と同じ(又はほぼ同じ)である必要がある。
モータ効率の変化は、効率低下につながる障害及び推論理由を検出するための重要な指標であり得る。モータ効率の検出は、システム(例えば、VRFシステム)が、異常な情報を早期に(例えば、壊滅的な障害の前に)識別することを可能にすることができる。検出されたモータ効率の変化に基づいて、モータの動作をそれに応じて調整することができる。具体的には、検出されたモータ効率の変化は、モータ駆動へのオフセット補償及び/又は機械の完全な停止をもたらし得る。したがって、モータ効率の予測は、全体的なハードウェアコスト(例えば、動作コスト、メンテナンスコストなど)を削減することができ、モータ駆動の信頼性を向上させることができる。
以下でより詳細に説明されるように、AIモデルを利用して、モータ効率を予測することができ、任意選択で、インバータの効率を利用して、モータ駆動システムの異常な状態を検出することができる。効率を予測するために使用されるAIモデルは、任意のタイプのAIモデルであることができる。特に、効率予測のためのAIモデルは、効率を記述するデータの事例依存的な性質のために、線形RNNモデルであり得る。線形RNNモデルが使用される場合、予測された効率は、モータの瞬間効率であり得る。
予測されたモータ効率は、モータが故障する可能性を示し得る。モータがより非効率になると、モータが故障する確率が増加し得る。このようにして、予測されたモータ効率は、モータが故障することが予測されるときを予測するために使用することができる。いくつかの実施形態では、閾値効率値を使用して、モータの障害を定義することができる。例えば、モータは、予測された効率が、50%、30%、20%などを下回っている場合、故障したと見なされ得る。このようにして、モータ効率の変化の傾向を識別し、将来を予測して、モータ効率が、閾値効率を下回ると予測され、モータが、故障したと見なされる時間を予測することができる。インバータ効率とインバータ障害についても同様の予測を行うことができる。
モータの予測された効率(及び/又はモータが故障すると予測された時間)に基づいて、効率に対処するために、もしあれば、どのような是正措置を開始すべきかについて判定を行うことができる。例えば、モータが、完全な効率(すなわち、100%の効率)で動作していると予測される場合、判定された是正措置は、予測された効率を記録することであり得る。別の例として、モータが、50%の効率で動作していると予測される場合、モータの効率を高めるために、モータに対するメンテナンスをスケジュールする是正措置がスケジュールされ得る。
ここで図23を参照すると、いくつかの実施形態による、モータ効率コントローラ2300のブロック図が示される。モータ効率コントローラ2300は、建物システムで使用されるモータの効率を予測するように構成することができる。具体的には、モータ効率コントローラ2300は、VRFシステム内のコンプレッサのモータの効率を予測するように構成することができる。しかしながら、モータ効率の予測は、他のシステム(例えば、他のHVACシステム)内のモータに同様に適用することができる。いくつかの実施形態では、モータ効率コントローラ2300の機能性は、本明細書に記載の1つ以上のコントローラ(例えば、オイル管理コントローラ800、コンプレッサ振動コントローラ1310、及び/又はVRF障害コントローラ2000)と組み合わせられる。
モータ効率コントローラ2300は、通信インターフェース2308及び処理回路2302を含むことが示されている。通信インターフェース2308は、様々なシステム、デバイス、又はネットワークとデータ通信を行うための、有線又は無線インターフェース(例えば、ジャック、アンテナ、伝送機、受信機、トランシーバ、有線端末など)を含み得る。例えば、通信インターフェース2308は、イーサネットベースの通信ネットワークを介してデータを送信及び受信するためのイーサネットカード及びポート、及び/又は無線通信ネットワークを介して通信するためのWi-Fiトランシーバを含み得る。通信インターフェース2308は、ローカルエリアネットワーク又はワイドエリアネットワーク(例えば、インターネット、建物WANなど)を介して通信するように構成され得、様々な通信プロトコル(例えば、BACnet、IP、LONなど)を使用し得る。
通信インターフェース2308は、モータ効率コントローラ2300と、様々な外部システム又はデバイス(例えば、訓練データソース2318、センサ2320、モータ2322、ユーザデバイス2324など)との間の電子データ通信を容易にするように構成されたネットワークインターフェースであり得る。例えば、モータ効率コントローラ2300は、通信インターフェース2308を介して、ユーザデバイス2324に、モータ効率予測を記述する通知を提供し得る。
処理回路2302は、プロセッサ2304及びメモリ2306を含むことが示されている。プロセッサ2304は、汎用若しくは特定目的プロセッサ、特定用途向け統合回路(ASIC)、1つ以上のフィールドプログラマブルゲートアレイ(FPGA)、処理構成要素のグループ、又は他の好適な処理構成要素であり得る。プロセッサ2304は、メモリ2306に記憶された、又は他のコンピュータ可読媒体(例えば、CDROM、ネットワーク記憶装置、リモートサーバなど)から受信された、コンピュータコード又は命令を実行するように構成され得る。
メモリ2306は、本開示に記載の様々なプロセスを完了及び/又は容易にするための、データ及び/又はコンピュータコードを記憶するための1つ以上のデバイス(例えば、メモリユニット、メモリデバイス、記憶デバイスなど)を含み得る。メモリ2306は、ランダムアクセスメモリ(RAM)、読み取り専用メモリ(ROM)、ハードドライブ記憶装置、一時記憶装置、不揮発性メモリ、フラッシュメモリ、光メモリ、又はソフトウェアオブジェクト及び/若しくはコンピュータ命令を記憶するための任意の他の好適なメモリを含み得る。メモリ2306は、データベース構成要素、オブジェクトコード構成要素、スクリプト構成要素、又は本開示に記載される様々な活動及び情報構造をサポートするための任意の他のタイプの情報構造を含み得る。メモリ2306は、処理回路2302を介して、プロセッサ2304に通信可能に接続され得、本明細書に記載の1つ以上のプロセスを(例えば、プロセッサ2304によって)実行するためのコンピュータコードを含み得る。いくつかの実施形態では、メモリ2306の1つ以上の構成要素は、単一の構成要素の一部である。しかしながら、メモリ2306の各構成要素は、説明を容易にするために、独立して示される。
メモリ2306は、訓練データ収集器2310を含むように示される。いくつかの実施形態では、訓練データ収集器2310は、図16を参照して説明された訓練データ収集器1610、及び/又は図20を参照して説明された訓練データ収集器2010に類似する、及び/又は同じである。訓練データ収集器2310は、訓練データソース2318からモータ効率を予測することに関連付けられた訓練データを取得することができる。訓練データソース2318は、クラウドデータベース、ローカルストレージ、ユーザ入力、モバイルデバイス、装置フィードバックなど、訓練データの任意の適切なソースを含むことができる。訓練データは、様々なコンディション下でのモータ2322の動作を記述する訓練データを含むことができる。例えば、訓練データは、モータ2322の回転速度、インバータ2328によってモータ2322に供給される電力、必要な加熱/冷却負荷などの値を含み得る。同様に、訓練データは、モータの推定された効率値を含むことができる。効率値は、モータ2322に関連付けられたコストに対する検出された変化(例えば、より高いコストが、より低い効率を示す動作コストの変化)に基づいて、自動的に、及び/又はいくつかの他のプロセスを介して推定され得る。
いくつかの実施形態では、訓練データ収集器2310は、シミュレーションフレームワークを利用して、訓練データのいくつか及び/又は全てを生成する。シミュレーションフレームワークは、モータ2322が、様々な動作コンディション(例えば、温度、加熱/冷却負荷など)に基づいて、どのように動作するかをモデル化し得る。同様に、シミュレーションフレームワークは、動作の結果として、モータ2322の効率が経時的にどのように低下するかをモデル化することができる。このようにして、モータ2322の動作及び劣化を表す訓練データを生成し、AIモデルを訓練するために利用することができる。
訓練データ収集器2310は、収集された訓練データを、訓練データセットとして、モデルジェネレータ2312に提供することができる。いくつかの実施形態では、モデルジェネレータ2312は、モデルジェネレータ1612及び/又はモデルジェネレータ2012に類似する、及び/又は同じである。訓練データを使用して、モデルジェネレータ2312は、VRFシステム(例えば、VRFシステム600、VRFシステム1900など)内のモータの効率値を予測するために使用することができるAIモデル(例えば、線形RNN)を生成することができる。特に、AIモデルは、モータ2322が動作している最大効率のパーセンテージを表すパーセンテージを出力し得る。この場合、最大効率は、モータ2322への入力電力が、モータ2322の出力電力に等しい(すなわち、φout,inverter=φin,inverter)状況によって表されることができる。いくつかの実施形態では、モデルジェネレータ2312はまた、AIモデルがまた、インバータ効率の予測も出力するように、AIモデルを生成する。この場合、インバータ効率は、モータ効率と同様にモデル化することができ、インバータ2328の動作コンディション(例えば、必要な加熱/冷却負荷、周囲温度など)に基づくことができる。いくつかの実施形態では、モデルジェネレータ2312は、モータ効率及びインバータ効率を予測するための別個のAIモデルを生成する。
モータ2322の効率を予測するように構成されたAIモデルに関して、AIモデルは、モータ2322の回転速度、(例えば、インバータ2328によって)モータ2322に提供される電力、周囲温度、必要な加熱/冷却負荷などの入力を含み得る。当該入力に基づいて、AIモデルは、モータ効率の予測を(例えば、最大効率のパーセンテージとして)出力することができる。
モデルジェネレータ2312は、AIモデルを予測ジェネレータ2314に提供することができる。いくつかの実施形態では、予測ジェネレータ2314は、予測ジェネレータ1614及び/又は予測ジェネレータ2014に類似する、及び/又は同じである。予測ジェネレータ2314は、AIモデル、及び入力変数の受信された値を利用して、モータ効率の予測を生成することができる。入力変数に関して、予測ジェネレータ2314は、センサ2320から、測定された変数の値を受信し得る。センサ2320は、AIモデルによって必要とされる入力の値を測定することができる任意のタイプのセンサ(例えば、温度センサ、圧力センサなど)を含むことができる。例えば、センサ2320は、周囲温度の値を予測ジェネレータ2314に提供する温度センサを含み得る。いくつかの実施形態では、センサ2320は、必要な入力値を提供するサードパーティソースを含む。例えば、センサ2320は、周囲温度値を提供する気象サービスを含み得る。
予測ジェネレータ2314はまた、モータ2322及びインバータ2328を含む装置2326からの装置フィードバックに基づいて、入力変数の値を取得することができる。装置フィードバックは、例えば、モータ2322の回転速度、電源電流、電圧、及びインバータ2328によってモータ2322に提供される入力電力などの変数の値を含むことができる。
入力変数の取得された値を使用して、予測ジェネレータ2314は、取得された入力変数をAIモデルに渡して、モータ効率の予測を生成することができる。モータ効率の当該予測は、是正措置ジェネレータ2316に提供することができる。いくつかの実施形態では、是正措置ジェネレータ2316は、是正措置ジェネレータ1616及び/又は是正措置ジェネレータ2016に類似する、及び/又は同じである。
是正措置ジェネレータ2316は、モータ効率の予測に基づいて、もしあれば、どのような是正措置を開始すべきかを判定するように構成することができる。特に、是正措置ジェネレータ2316は、モータ効率の低下に対処するために措置を講じるべきかどうかを判定することができる。是正措置ジェネレータ2316によって開始することができる是正措置は、例えば、ユーザデバイス2324を介して、予測されたモータ効率について、ユーザに警告すること、制御信号を介して、モータ2322の動作を調整すること、モータ2322を無効にすること、モータ2322のメンテナンス/交換をスケジュールすること、モータ効率の予測された値をデータベースに記録することなどを含み得る。
どのような是正措置を開始するかを判定するために、是正措置ジェネレータ2316は、特定の効率範囲を、特定の是正措置に対応させ得る。例えば、是正措置ジェネレータ2316は、75%~100%の効率値を、予測された効率をユーザに通知する是正措置に、50%~75%の効率値を、制御信号を介してモータ2322の動作を調整するための是正措置に、及び0%~50%の効率値を、モータ2322のメンテナンス及び/又は交換をスケジュールするための是正措置に、関連付け得る。いくつかの実施形態では、是正措置ジェネレータ2316は、予測された効率値に基づいてどのような是正措置を開始するべきかを判定するためのいくつかの他の判定を利用する。
是正措置を開始する結果として、モータ2322の非効率性に対処することができる。このようにして、モータ2322が、高い非効率性の下で動作する状況の頻度を、回避することができる。これにより、VRFシステムの信頼性を高め、全体的なコストを削減し、VRFシステムの一般的なメンテナンスを簡素化することができる。
ここで図24を参照すると、いくつかの実施形態による、AIモデルを使用して、VRFシステム内のモータの効率を予測するためのプロセス2400のフロー図が示される。プロセス2400は、VRFシステムのモータを参照して説明されるが、プロセス2400は、VRFシステムのインバータに関連付けられた効率予測を生成するために同様に適用できることを理解されたい。いくつかの実施形態では、プロセス2400のいくつか及び/又は全てのステップは、モータ効率コントローラ2300によって実行される。
プロセス2400は、VRFシステムのモータの動作コンディション、及びモータの関連付けられた効率値を記述する訓練データを取得することを含むことが示される(ステップ2402)。訓練データは、例えば、クラウドデータベース、建物のローカルストレージなどの様々な訓練データソースから、ユーザ入力に基づいて、装置からのフィードバックなどを介して取得することができる。訓練データは、モータの効率値を予測するようにAIモデルを訓練することに関連する任意の情報を含むことができる。例えば、訓練データは、動作中のモータの回転速度、周囲温度、加熱/冷却負荷、モータに提供される電流、モータに提供される電圧、モータに提供される電力、モータの推定された効率値などの値を含み得る。いくつかの実施形態では、ステップ2402は、訓練データ収集器2310によって実行される。
プロセス2400は、訓練データに基づいて、モータの効率を予測するための人工知能(AI)モデルを訓練することを含むことが示される(ステップ2404)。AIモデルは、モータの動作に影響を与える変数のセットと、モータの対応する効率値との間の相関関係を学習するように訓練され得る。ステップ2404で訓練されたAIモデルは、様々な異なるAIモデルのいずれかであり得る。例えば、AIモデルは、モータの効率を評価するための線形RNNであり得る。いくつかの実施形態では、ステップ2404は、モデルジェネレータ2312によって実行される。
プロセス2400は、モータの動作に関連付けられたデータを取得することを含むことが示される(ステップ2406)。ステップ2406で取得されたデータは、モータ効率の予測が所望される場合、実際の動作中のモータに基づき得る。特に、ステップ2406で取得されたデータは、ステップ2404で生成されたAIモデルへの入力変数の値を含むことができる。したがって、データは、モータの回転速度、周囲温度、モータへの入力電力などの値を含むことができる。いくつかの実施形態では、データは、ステップ2402で訓練データを取得するために使用される同じソースのいくつか及び/又は全てから取得され得る。いくつかの実施形態では、ステップ2406は、予測ジェネレータ2314によって実行される。
プロセス2400は、AIモデルを使用して、取得されたデータに基づいて、モータの効率を予測することを含むことが示されている(ステップ2408)。ステップ2408において、ステップ2406で取得されたデータを、入力としてAIモデルに渡して、モータの効率に関する予測を生成することができる。いくつかの実施形態では、モータの予測された効率は、最大効率のパーセンテージとして提供される。いくつかの実施形態では、予測された効率は、別のメトリック(例えば、「良い」、「中間」、又は「悪い」の評価)として提供される。いくつかの実施形態では、ステップ2408は、予測ジェネレータ2314によって実行される。
プロセス2400は、AIモデルによって出力された、予測されたモータ効率に基づいて、是正措置を判定することを含むことが示される(ステップ2410)。是正措置は、モータの推定された劣化状態に基づいて、判定することができる。例えば、高効率値(例えば、>80%効率、>90%効率など)は、モータが著しく劣化していないことを示し得る。したがって、ステップ2410で判定される是正措置は、ユーザデバイスに通知をディスパッチする、又はデータベースに、推定された効率値を記録するなどの低コスト(例えば、金銭的コスト、時間的コストなど)に関連付けられた是正措置であり得る。しかしながら、推定された効率が低い場合(例えば、<50%効率、<40%効率など)、ステップ2410で判定される是正措置は、モータのメンテナンスをスケジュールすること、モータを無効にすることなど、より高いコストに関連付けられた是正措置であり得る。このようにして、ステップ2410で判定される是正措置は、モータの推定された効率に基づいて、動的に調整することができる。いくつかの実施形態では、ステップ2410は、是正措置ジェネレータ2316によって実行される。
プロセス2400は、是正措置を開始することを含むことが示される(ステップ2412)。ステップ2410で判定された是正措置に基づいて、ステップ2412は、是正措置を開始する方法を判定することと、是正措置が完了するために必要なステップを実行することと、を含むことができる。例えば、是正措置が、ユーザに通知することである場合、ステップ2412は、通知を生成することと、通信インターフェースを使用して、通知を通信することと、を含み得る。別の例として、是正措置が、モータを無効にすることである場合、ステップ2412は、モータをオフにする制御信号を生成することと、制御信号をモータに提供することと、を含み得る。いくつかの実施形態では、ステップ2412は、是正措置ジェネレータ2316によって実行される。
ニューラルネットワーク実装の例
概して、図25A及び図25Bを参照すると、いくつかの実施形態による、予測を生成するためのものであり得るAIモデル構造に関連付けられた例示が示される。以下に記載されるAIモデル構造は、本明細書に記載される様々なコントローラ及び/又は方法のいずれかにおいて利用することができる。例えば、図25A~図25Bに提供されるAIモデル構造は、コンプレッサ振動コントローラ1310、VRF障害コントローラ2000などによって利用され得る。図25A及び図25Bに提供されるAIモデル構造は、単に例のために提供され、予測を生成するために利用することができるAIモデル構造に制限することを意図しないことを理解されたい。
ここで図25Aを参照すると、いくつかの実施形態による、RNN構造2500の例示が示される。いくつかの実施形態では、RNN構造2500は、図9Aを参照して説明されたRNN構造900に類似する、及び/又は同じである。いくつかの実施形態では、RNN構造2500は、LSTMモデルのハイレベルビューを例示し得る。LSTMモデルは、深層学習の分野で使用することができる特定の人工RNNアーキテクチャである。LSTMモデルは、時系列データのシーケンス全体を分類及び処理し、予測を行うことができる。有利には、LSTMモデルは、時系列データ内の重要なイベント間の未知の持続時間のラグがあっても予測を生成することができる。LSTMモデルは、例えば、シーケンス入力層、1つ以上のドロップアウト層、1つ以上の全結合層、1つ以上のLSTM層、出力層などの様々な層を含むことができる。
図25Aに示されるように、RNN構造2500は、凝縮されたモデル構造、及び「展開された」モデル構造の両方によって表すことができる。展開されたモデル構造は、時間ステップ間で情報が完全に失われないように、RNN構造2500が、どのように、出力に影響を与える可能性のある情報を経時的に保存するかをより詳細に例示することができる。図25Aにおいて、xは、RNNへの入力を表すことができ、Uは、xに適用される入力パラメータを表すことができ、oは、RNNの出力を表すことができ、Wは、oを生成する、hの出力に適用される出力パラメータを表すことができ、hは、RNNの重み及び活性化関数を含むRNNの一次ブロックを表すことができ、vは、時間ステップの間で通信される情報を表すことができる。
ここで図25Bを参照すると、いくつかの実施形態による、LSTMモデル構造2550の例示が示される。LSTMモデル構造2550は、情報が、RNN内の時間ステップ間でどのように保存されるかを例示することができる。LSTMモデル構造2550は、図25Bに示されるブロックへの出力を生成するために使用することができる関数f、g、i、及びoを含むことが示される。LSTMモデル構造2550は更に、忘却ゲート、更新ゲート、及び出力ゲートを含むように示される。忘却ゲートは、非関連データが、時間シーケンス内の将来の時間ステップのために考慮され、記憶されることを排除するように構成することができる。更新ゲートは、入力情報を組み合わせて、データの変更を考慮するために、何らかの動作を適用することができる。最後に、出力ゲートは、どの情報が、次の時間ステップに出力として渡されるかを決定することができる。LSTMモデル構造2550は、時間シーケンス内の特定の時間ステップに関連付けられた情報を、次の時間ステップに渡す複数のブロックを含むことができる。有利には、この構造は、情報が、保持され、時間ステップの間に失われないことを可能にし、それによって時系列データに対する、予測の精度を高める。
例示的な実施形態の構成
様々な例示的な実施形態に示されるシステム及び方法の構成及び配置は、例示的なものに過ぎない。本開示では、いくつかの実施形態のみが詳細に説明されてきたが、多くの修正が可能である(例えば、様々な要素のサイズ、寸法、構造、形状、及び割合の変化、パラメータの値、取り付け配置、材料の使用、色、配向など)。例えば、要素の位置は、逆にされるか、又はそうでなければ変化させることができ、別個の要素の性質若しくは数、又は位置は、変更するか、又は変化させることができる。そのため、全てのそのような修正は、本開示の範囲内に含まれることが意図される。任意のプロセス又は方法ステップの順序又はシーケンスは、代替実施形態に従って、変化又は再順序付けすることができる。本開示の範囲から逸脱することなく、例示的な実施形態の設計、動作コンディション及び配置において、他の置換、修正、変更、及び省略を行うことができる。
本開示は、様々な動作を達成するための任意の機械可読媒体上の方法、システム、及びプログラム製品を企図する。本開示の実施形態は、既存のコンピュータプロセッサを使用して、又は適切なシステムの専用コンピュータプロセッサによって、実装され、この目的若しくは別の目的のために、又は有線システムによって組み込まれることができる。本開示の範囲内の実施形態は、その上に記憶された機械実行可能命令又はデータ構造を搬送する又は有するための機械可読媒体を備えるプログラム製品を含む。そのような機械可読媒体は、プロセッサを備えた、汎用若しくは専用のコンピュータ又は他の機械によってアクセスすることができる任意の利用可能な媒体であり得る。例として、そのような機械可読媒体は、RAM、ROM、EPROM、EEPROM、CD-ROM、若しくは他の光ディスク記憶装置、磁気ディスク記憶装置若しくは他の磁気記憶装置、又は所望のプログラムコードを機械実行可能命令若しくはデータ構造の形態で搬送若しくは記憶するために使用することができ、プロセッサを備える、汎用若しくは専用コンピュータ又は他の機械によってアクセスすることができる任意の他の媒体を含むことができる。上記の組み合わせはまた、機械可読媒体の範囲内に含まれる。機械実行可能命令は、例えば、汎用コンピュータ、専用コンピュータ、又は専用処理機械に、特定の機能又は機能群を実行させる命令及びデータを含む。
図は、方法ステップの特定の順序を示すが、ステップの順序は、描写されるものとは異なる場合がある。また、2つ以上のステップを同時に、又は部分的に同時に実行することができる。このような変形は、選択されたソフトウェア及びハードウェアシステム、及び設計者選択に依存する。全てのそのような変形は、本開示の範囲内である。同様に、ソフトウェア実装は、様々な接続ステップ、処理ステップ、比較ステップ、及び決定ステップを達成するために、ルールベースのロジック及び他のロジックを備える標準的なプログラミング技術によって達成され得る。