JP7600841B2 - 切換機構、流路切換機構及び液体吐出装置 - Google Patents
切換機構、流路切換機構及び液体吐出装置 Download PDFInfo
- Publication number
- JP7600841B2 JP7600841B2 JP2021070182A JP2021070182A JP7600841B2 JP 7600841 B2 JP7600841 B2 JP 7600841B2 JP 2021070182 A JP2021070182 A JP 2021070182A JP 2021070182 A JP2021070182 A JP 2021070182A JP 7600841 B2 JP7600841 B2 JP 7600841B2
- Authority
- JP
- Japan
- Prior art keywords
- flow path
- rotating body
- rotation
- angle
- switching mechanism
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





























Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J2/00—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed
- B41J2/005—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed characterised by bringing liquid or particles selectively into contact with a printing material
- B41J2/01—Ink jet
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J2/00—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed
- B41J2/005—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed characterised by bringing liquid or particles selectively into contact with a printing material
- B41J2/01—Ink jet
- B41J2/135—Nozzles
- B41J2/165—Prevention or detection of nozzle clogging, e.g. cleaning, capping or moistening for nozzles
- B41J2/16505—Caps, spittoons or covers for cleaning or preventing drying out
- B41J2/16508—Caps, spittoons or covers for cleaning or preventing drying out connected with the printer frame
- B41J2/16511—Constructions for cap positioning
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J2/00—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed
- B41J2/005—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed characterised by bringing liquid or particles selectively into contact with a printing material
- B41J2/01—Ink jet
- B41J2/135—Nozzles
- B41J2/165—Prevention or detection of nozzle clogging, e.g. cleaning, capping or moistening for nozzles
- B41J2/16517—Cleaning of print head nozzles
- B41J2/1652—Cleaning of print head nozzles by driving a fluid through the nozzles to the outside thereof, e.g. by applying pressure to the inside or vacuum at the outside of the print head
- B41J2/16532—Cleaning of print head nozzles by driving a fluid through the nozzles to the outside thereof, e.g. by applying pressure to the inside or vacuum at the outside of the print head by applying vacuum only
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J2/00—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed
- B41J2/005—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed characterised by bringing liquid or particles selectively into contact with a printing material
- B41J2/01—Ink jet
- B41J2/17—Ink jet characterised by ink handling
- B41J2/175—Ink supply systems ; Circuit parts therefor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J2/00—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed
- B41J2/005—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed characterised by bringing liquid or particles selectively into contact with a printing material
- B41J2/01—Ink jet
- B41J2/17—Ink jet characterised by ink handling
- B41J2/175—Ink supply systems ; Circuit parts therefor
- B41J2/17503—Ink cartridges
- B41J2/17506—Refilling of the cartridge
- B41J2/17509—Whilst mounted in the printer
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J29/00—Details of, or accessories for, typewriters or selective printing mechanisms not otherwise provided for
- B41J29/12—Guards, shields or dust excluders
- B41J29/13—Cases or covers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J29/00—Details of, or accessories for, typewriters or selective printing mechanisms not otherwise provided for
- B41J29/38—Drives, motors, controls or automatic cut-off devices for the entire printing mechanism
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J2/00—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed
- B41J2/005—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed characterised by bringing liquid or particles selectively into contact with a printing material
- B41J2/01—Ink jet
- B41J2/135—Nozzles
- B41J2/165—Prevention or detection of nozzle clogging, e.g. cleaning, capping or moistening for nozzles
- B41J2/16505—Caps, spittoons or covers for cleaning or preventing drying out
- B41J2/16508—Caps, spittoons or covers for cleaning or preventing drying out connected with the printer frame
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J2/00—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed
- B41J2/005—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed characterised by bringing liquid or particles selectively into contact with a printing material
- B41J2/01—Ink jet
- B41J2/135—Nozzles
- B41J2/165—Prevention or detection of nozzle clogging, e.g. cleaning, capping or moistening for nozzles
- B41J2/16517—Cleaning of print head nozzles
- B41J2/1652—Cleaning of print head nozzles by driving a fluid through the nozzles to the outside thereof, e.g. by applying pressure to the inside or vacuum at the outside of the print head
- B41J2/16523—Waste ink transport from caps or spittoons, e.g. by suction
Landscapes
- Multiple-Way Valves (AREA)
- Ink Jet (AREA)
- Engineering & Computer Science (AREA)
- Environmental & Geological Engineering (AREA)
Description
前記第1流路と連通する流路を切換可能な前記回転弁と、を備え、前記回転弁は前記第2回転体とともに回転可能であるとともに、前記第2回転体の複数の前記凸部のうち所定の凸部が所定の位置に位置するときに、前記第1流路と、前記異なる2つ以上の流路のうち何れかと、が連通する。
対してインク等の液体を吐出することにより媒体に文字や画像等を印刷するインクジェット式のプリンターである。
<複合機の構成について>
図1に示すように、複合機11は、液体吐出装置12と、液体吐出装置12上に配置される画像読取装置13とを備える。複合機11は、画像読取装置13が液体吐出装置12の上側を覆う状態にあり、全体として略直方体状を呈する。
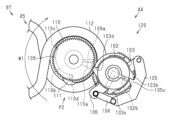
図2に示すように、液体吐出装置12は、ノズル31から液体を吐出する液体吐出部30と、液体貯留部50と、気泡排出機構BSと、走査方向Xに往復移動可能なキャリッジ33と、を備える。キャリッジ33は、液体吐出部30と液体貯留部50と気泡排出機構BSとを搭載する。液体貯留部50は、液体収容体18から液体吐出部30に供給される液体を貯留可能な貯留室51を有する。気泡排出機構BSは、液体貯留部50の貯留室51の上部の空気を排出可能に構成される。
は、排出回収流路46と、排出回収流路46から回収された廃液を収容する廃液収容部47と、排出回収流路46に接続する流路を選択的に切り換える流路切換機構44と、ポンプ45および流路切換機構44を駆動する駆動源と、を備える。排出回収流路46の上流端がポンプ45の他端45bと接続されることで、排出回収流路46はポンプ45と連通する。排出回収流路46の下流端が廃液収容部47と接続されることで、排出回収流路46は廃液収容部47と連通する。ポンプ45の一端45aがチューブ43を通じて流路切換機構44と接続されることで、ポンプ45は流路切換機構44と連通する。つまり、廃液収容部47と流路切換機構44とが連通する。
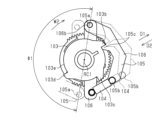
図3に示すように、流路切換機構44は、回転弁102を備える。回転弁102は固定部分であるハウジング101を含んで構成される。ハウジング101は第1流路101bおよび第1流路101bと異なる2つ以上の流路を有する。すなわち、回転弁102は第1流路101bおよび第1流路101bと異なる2つ以上の流路を有する。図4に示す外周面102aが、図4に示す内周面101aに対して回転可能に嵌合することで、回転弁102の回転部分が、ハウジング101に対して回転可能に構成される。なお、回転弁102の回転部分が、固定部分であるハウジング101に対して回転することを、回転弁102が回転するという。本実施形態においては、回転弁102は、第1流路101b、第2流路101c、第3流路101dを有する。すなわち、回転弁102は、第1流路101bおよび第1流路101bと異なる2つの流路101c,101dを有する。
面103gとが当接する。第1回転体106が逆転方向W2にさらに逆転すると、斜面103gの垂直方向に押圧力が作用し、斜面105gの垂直方向に反力が作用する。側面105fと側面103fとは、何れも回転中心RC1から半径方向に延びる面に対して角度を有した面であるため、その反力は係合部材105を回転中心RC1から離れる方向D1に回動させる成分を含む。そのため、第1回転体106が第2回転体103を回転させることなく、係合部105cが斜面103gに沿って回転中心RC1から離れる方向D1に変位する。第1回転体106が逆転方向W2にさらに逆転すると、係合部105cが側面103fに沿って回転中心RC1に近づく方向D2に変位する。すなわち、第1回転体106が逆転方向W2に逆転する場合には、係合部105cが第2回転体103の外周103eに沿って移動することで第2回転体103の逆転方向W2の逆転が抑制される。なお、連続的および断続的に続く逆転方向W2の回転を逆転という。
周面102aが第1流路101bと連通する流路以外の流路を塞ぐように、回転弁102が構成されてもよい。流路切換機構44が3つ以上の第1流路101bと異なる流路を有するときも、外周面102aが第1流路101bと連通する所定の流路以外の流路を塞ぐように、回転弁102が構成されることで、第1流路101bと所定の流路とを連通することができる。
図5に示すように、第2回転体103は、複数の凸部が外周103eに回転方向に間隔をあけて設けられる。そして、それらの間隔のうち少なくとも1つの第1間隔S1は、他の間隔よりも大きく形成される。本実施形態においては、1つの第1間隔S1が、2つの他の間隔としての第2間隔S2よりも大きく形成される。そして、凸部103bと凸部103cとが第2間隔S2を構成し、凸部103cと凸部103dとが第2間隔S2を構成し、凸部103dと凸部103bとが第1間隔S1を構成する。なお、本明細書では、第2回転体103の回転方向における凸部の間隔とは、凸部における図4に示す側面103fの間隔をいう。
図5に示すように、切換機構120において、切換動作が開始される。例えば、係合部105cが凸部103bに係合する状態であるときに、図5に示す位置の第1回転体106が第2回転体103とともに、図6に示す第2回転角度Φ2で正転方向W1へ正転することで、図6に示す位置まで回転する。より詳しくは、図6に示すように、係合部105cが凸部103bを押圧することで、第1回転体106は第2回転体103を所定の回転位置まで回転させる。そして、図6に示す位置の第1回転体106がその正転の回転角度と同じ回転角度である図7に示す第2回転角度Φ2で逆転方向W2へ逆転することで、第1回転体106だけが図7に示す位置まで回転する。このとき、図7に示すように、回転中心RC1から離れる方向D1に係合部105cが変位することで、係合部105cが凸部103cを乗り越える。第2回転角度Φ2は、凸部103bと凸部103cとが回転中心RC1に対して形成する中心角である第2角度θ2と同じ回転角度である。このとき、切換機構120は、係合部105cが凸部103bに係合する図5に示す状態から、係合部105cが凸部103cに係合する図7に示す状態に変化する。そして、切換動作が終了する。
回転弁102の回転位置が不明になったときに、切換機構120が、第2回転体103を所定の回転位置に位置決めする動作である原点出し動作について説明する。原点出し動作は、係合部105cが第1間隔S1内に配置される第1動作、係合部105cが第1間
隔S1内に配置された状態から第2回転体103が所定の回転位置に位置決めされる第2動作、の順で実行される。例えば、意図しない事象によって回転弁102の回転位置が不明になったときに、原点出し動作によって、回転弁102とともに回転する第2回転体103が、所定の回転位置に位置決めされる。
図11に示すように、係合部105cが第1間隔S1内に位置するとき、駆動源114は、第1角度θ1よりも小さく第2角度θ2以上の回転角度で、第1回転体106に正逆転動作を実行させる。第1回転体106が正転方向W1へ正転するときは、係合部105cが凸部103dに係合しても係合部105cが凸部103dを押圧することで、第1回転体106が第2回転体103を回転させる。そのため、正転が終了したときは、係合部105cは第1間隔S1内に位置する状態のままである。
図11に示すように、係合部105cが第1間隔S1内に位置するとき、駆動源114は、第1角度θ1以上の回転角度で、第1回転体106に正逆転動作を実行させる。回転角度が第1角度θ1よりも大きいため、第1回転体106が正転方向W1へ正転するときに、係合部105cが凸部103dに係合することで係合部105cが凸部103dを押圧する。そのため、第1回転体106が第2回転体103を所定の回転位置まで回転させる。
03dが図4に示す第3流路101dの位置に位置し、かつ係合部105cが凸部103bに係合するように、第2回転体103の回転位置を切り換える。すなわち、第2動作における回転角度が「第1角度θ1」であるとき、切換機構120は、第2回転体103の回転位置を、図4に示す第1流路101bが何れの流路とも連通しない回転位置に切り換える。そして、この状態を回転弁102の原点として、前述の切換動作が行われることで、第1流路101bと連通する流路が切り換えられる。
図13に示すように、吸引装置97は流路切換機構44を含んで構成される。そして、流路切換機構44は切換機構120を含んで構成される。切換機構120は、切換機構120を駆動する駆動部119を備える。駆動部119は、駆動回転体としての駆動歯車109を有する。駆動歯車109は、駆動源114から伝達される駆動力を受けて回転可能に構成されることで、第1回転体106を駆動する。第1回転体106は、駆動歯車109を介して駆動源114から伝達される駆動力を受ける。駆動源114は、回転角度が制御されて正転と逆転とが可能な、例えば、ステッピングモータや、エンコーダ付きのDCモータである。なお、駆動源が往復直線運動を行う直動式の駆動源、かつその直線運動の移動距離が制御される駆動源であって、さらにその直線運動が回転運動に変換されることで回転角度が制御される場合、その駆動源は回転角度が制御される駆動源と同義とする。
最初に、各歯車について説明する。
図14に示すように、第1歯車108は、回転中心RC1を中心に回転可能に構成される。駆動歯車109の歯109eと第1歯車108の歯108eとが噛み合うことで、駆動歯車109の回転が第1歯車108に伝達される。内周面108aには不図示の回転軸が嵌合され、接合部108b,108cによって、その回転軸が第1歯車108に対して回転不能に固定される。
。また、第2歯車107の回転トルクが、摩擦クラッチ117の伝達トルクよりも大きいときは、第1歯車108が回転しても摩擦クラッチ117が滑ることで第2歯車107は回転しない。換言すれば、駆動歯車109の回転が第2歯車107に伝達されていないときは、第2歯車107に対して負荷トルクが発生すると、第1歯車108が回転しても第2歯車107は回転しない。
図17に示すように、第2歯車107が正転方向W1に正転するときに、被係止部107bが係止部106dに係止されることで、第2歯車107は第1回転体106に係止される。そして、さらに第2歯車107が正転方向W1に正転すると、第1回転体106が第2歯車107に牽引されて、第2歯車107とともに正転方向W1に正転する。
図19に示すように、駆動歯車109が正転方向W1に正転すると、図13に示す第1歯車108が正転方向W1に正転する。このとき、第1回転体106と第2歯車107との状態は図18に示す状態であり、第1歯車108の回転方向である正転方向W1は、被係止部107cが係止部106dから離れる方向である。そのため、駆動歯車109と第2歯車107とが噛み合っていない状態であっても、図13に示す摩擦クラッチ117によって第1歯車108の回転が第2歯車107に伝達されることで、第2歯車107が第1歯車108とともに正転方向W1に正転する。
6は回転を停止し、第2歯車107と第1歯車108とが逆転方向W2に逆転する。そのため、被係止部107bが係止部106dから離れる。
図25に示すように、第2係合部109aが被係合部110aに対して逆転方向W2に向けて係合した状態、もしくは第2係合部109aが被係合部110aに対して正転方向W1側に少し離れた状態で、駆動歯車109は停止している。図25は、流路切換機構44において図24に示す状態で駆動歯車109が逆転方向W2に逆転した後に原点出し動作が行われ、その原点出し動作の第2動作において、係合部105cが凸部103bに係
合した状態を示す。この状態で流路切換動作、ポンプ吸引動作が開始される。
図28に示すように、流路切換機構44は、ポンプ吸引動作を実行する。図25に示す状態においてポンプ吸引動作が開始される。図28に示すように、第1回転体106の歯106eが駆動歯車109の歯109eと噛み合う位置から外れているため、駆動歯車109が逆転方向W2に逆転すると、摩擦クラッチ117が滑ることで、駆動歯車109だけが逆転方向W2に逆転する。すなわち、ポンプ45が駆動される間は、駆動回転体としての駆動歯車109と第1回転体106との接続が切り離される。なお、この接続切り離しを確実に行うため、第1回転体106に不要な逆転を制限する度当てを設けてもよい。例えば第1回転体106に突起を設け、図28の回転位置を超えて逆転しそうになった時にハウジング101に設けた突起に度当たるようにすることで、確実に第1回転体106を止めておくことができる。
図29に示すように、流路切換機構44は、ポンプレリース動作を実行する。図28に示す状態においてポンプ吸引動作が終了した後に、ポンプレリース動作が開始される。図29に示すように、駆動歯車109が正転方向W1に正転することで、図16に示す端歯106iが歯109eと噛み合わない回転位置まで第1回転体106が正転方向W1に正転する。
本実施形態の作用について説明する。
複合機11の電源が投入されて、最初に、ポンプレリース動作が行われる。流路切換機構44において、駆動部119は、駆動歯車109を正転方向W1に正転させ続ける。第1回転体106が正転方向W1に正転し続けることで、第1回転体106は図30に示す回転位置まで正転方向W1に正転して、その位置で回転を停止し、駆動歯車109だけが正転方向W1に正転し続ける。そして、駆動歯車109が正転方向W1に正転し続けることで、ローラー111はレリース位置P2に移動する。
第2回転体103が所定の回転位置に位置決めされる第2動作とを行う。
本実施形態の効果について説明する。
本実施形態の切換機構120、流路切換機構44及び液体吐出装置12においては、以下の効果が得られる。
路101bと異なる2つ以上の流路101c,101dのうち何れかと、が連通する。すなわち、上記切換機構120によって、第1流路101bと連通する流路を切り換えることができる。
以下、第2実施形態について図面を参照して説明する。第2実施形態は第1実施形態とほぼ同じであるため、同一の構成については同一符号を付すことによって重複した説明は省略する。
動作における回転角度が設定される。これにより、流路切換機構44は、第1流路101bと、所定の流路とを連通させる。なお、その状態から再度原点出し動作が行なわれることで、その原点出し動作の第2動作において流路切換機構44が、第1流路101bと他の流路とを連通させてもよい。
第2実施形態の作用および効果は第1実施形態と同じであるため、説明を省略する。
<実施形態の変更例>
本実施形態は、以下のように変更して実施することができる。本実施形態及び以下の変更例は、技術的に矛盾しない範囲で互いに組み合わせて実施することができる。
以下に、上述した実施形態及び変更例から把握される技術的思想及びその作用効果を記載する。
に間隔をあけて設けられる第2回転体と、を備え、前記第1回転体は、前記第2回転体の前記外周に沿って変位可能な係合部を含み、前記第1回転体が正転する場合には、前記係合部が前記凸部に係合することで前記第2回転体が前記第1回転体とともに正転され、前記第1回転体が逆転する場合には、前記係合部が前記第2回転体の前記外周に沿って移動することで前記第2回転体の逆転が抑制されるように構成され、前記駆動源が前記第1回転体に正転と逆転とを順に行う正逆転動作を実行させることで、前記第2回転体の回転位置を所定の回転位置に切り換える切換機構であって、前記間隔のうち少なくとも1つの第1間隔は、他の間隔よりも大きく形成され、前記第1間隔を構成する2つの凸部が前記回転中心に対して形成する中心角を第1角度、前記他の間隔を構成する2つの凸部が前記回転中心に対して形成する中心角のうち最大の角度を第2角度としたとき、前記駆動源は、前記第1角度よりも小さく前記第2角度以上の回転角度で、前記第1回転体に前記正逆転動作を繰り返して実行させることで、前記係合部を前記第1間隔内に位置させる。
この構成によれば、係合部が第2回転体の外周から外れることを抑制できる。
(F)上記流路切換機構において、一端が前記第1流路と連通するポンプと、前記駆動源から伝達される前記駆動力を受けて前記ポンプを駆動する駆動回転体と、を備え、前記第1回転体は、前記駆動回転体を介して前記駆動源から伝達される前記駆動力を受けてもよい。
(G)上記流路切換機構において、前記駆動回転体は第2係合部を有し、前記ポンプは、回転方向において前記第2係合部と係合可能な被係合部を有し、前記第2係合部が前記被係合部に係合した状態で前記駆動回転体が回転することにより前記ポンプが駆動され、前記ポンプが駆動される間は、前記駆動回転体と前記第1回転体との接続が切り離されてもよい。
ちの第2流路に接続され、前記排出流路の他端は、前記第1流路と異なる2つ以上の流路のうちの第3流路に接続される。
(J)流路切換機構は、駆動源から伝達される駆動力を受けて回転可能な駆動回転体と、前記駆動回転体を介して前記駆動力を受けるポンプと、前記駆動回転体を介して前記駆動力を受け、複数の流路のうち前記ポンプと連通する流路を切換可能な切換機構と、を備え、前記駆動回転体は第2係合部を有し、前記ポンプは、回転方向において前記第2係合部と係合可能な被係合部を有し、前記第2係合部が前記被係合部に係合しない領域で前記駆動回転体が正転および逆転を行うことにより前記ポンプが連通する流路が切り換えられ、前記第2係合部が前記被係合部に係合した状態で前記駆動回転体が回転することにより前記ポンプが駆動される。
ブ、113…第2付勢部材、114…駆動源、117…摩擦クラッチ、118…遅延伝達機構、119…駆動部、120…切換機構、θ1…第1角度、θ2…第2角度、Φ1…第1回転角度、Φ2…第2回転角度、Ψ…揺動角、BS…気泡排出機構、D1…回転中心から離れる方向、D2…回転中心に近づく方向、P1…押圧位置、P2…レリース位置、RC1…回転中心、RC2…回転中心、S1…第1間隔、S2…他の間隔としての第2間隔、W1…正転方向、W2…逆転方向、X…走査方向、Y…搬送方向、Z…鉛直方向。
Claims (9)
- 駆動源から伝達される駆動力を受けて正転と逆転とを行う第1回転体と、
前記第1回転体の回転中心を中心に回転し、外周において、複数の凸部が回転方向に間隔をあけて設けられる第2回転体と、を備え、
前記第1回転体は、前記第2回転体の前記外周に沿って変位可能な係合部を含み、
前記第1回転体が正転する場合には、前記係合部が前記凸部に係合することで前記第2回転体が前記第1回転体とともに正転され、前記第1回転体が逆転する場合には、前記係合部が前記第2回転体の前記外周に沿って移動することで前記第2回転体の逆転が抑制されるように構成され、
前記駆動源が前記第1回転体に正転と逆転とを順に行う正逆転動作を実行させることで、前記第2回転体の回転位置を所定の回転位置に切り換える切換機構であって、
前記間隔のうち少なくとも1つの第1間隔は、他の間隔よりも大きく形成され、
前記第1間隔を構成する2つの凸部が前記回転中心に対して形成する中心角を第1角度、前記他の間隔を構成する2つの凸部が前記回転中心に対して形成する中心角のうち最大の角度を第2角度としたとき、
前記駆動源は、前記第1角度よりも小さく前記第2角度以上の回転角度で、前記第1回転体に前記正逆転動作を繰り返して実行させることで、前記係合部を前記第1間隔内に位置させることを特徴とする切換機構。 - 前記駆動源は、前記凸部の数よりも1少ない数以上の繰り返し回数で、前記第1回転体に前記正逆転動作を繰り返して実行させることで、前記係合部を前記第1間隔内に位置させることを特徴とする請求項1に記載の切換機構。
- 前記係合部が前記第1間隔内に位置するときに、前記駆動源は、前記第1角度以上の所定の回転角度で、前記第1回転体に前記正逆転動作を実行させることで、前記第2回転体の回転位置を所定の回転位置に切り換えることを特徴とする請求項1または請求項2に記載の切換機構。
- 前記第1回転体は、前記係合部を前記第2回転体の外周に向けて付勢する第1付勢部材を有することを特徴とする請求項1から請求項3のうち何れか一項に記載の切換機構。
- 請求項1から請求項4のうち何れか一項に記載の切換機構と、
第1流路および該第1流路と異なる2つ以上の流路を有し、回転弁が回転することで、前記異なる2つ以上の流路のうち前記第1流路と連通する流路を切換可能な前記回転弁と、を備え、
前記回転弁は前記第2回転体とともに回転可能であるとともに、前記第2回転体の複数の前記凸部のうち所定の凸部が所定の位置に位置するときに、前記第1流路と、前記異なる2つ以上の流路のうち何れかと、が連通することを特徴とする流路切換機構。 - 一端が前記第1流路と連通するポンプと、
前記駆動源から伝達される前記駆動力を受けて前記ポンプを駆動する駆動回転体と、を備え、
前記第1回転体は、前記駆動回転体を介して前記駆動源から伝達される前記駆動力を受けることを特徴とする請求項5に記載の流路切換機構。 - 前記駆動回転体は第2係合部を有し、
前記ポンプは、回転方向において前記第2係合部と係合可能な被係合部を有し、
前記第2係合部が前記被係合部に係合した状態で前記駆動回転体が回転することにより前記ポンプが駆動され、
前記ポンプが駆動される間は、前記駆動回転体と前記第1回転体との接続が切り離されることを特徴とする請求項6に記載の流路切換機構。 - 前記第2係合部が前記被係合部に係合しない領域で前記駆動回転体が正転と逆転とを行うことにより、前記第1流路と連通する流路が切り換えられることを特徴とする請求項7に記載の流路切換機構。
- ノズルから液体を吐出する液体吐出部と、
液体を収容する液体収容体から前記液体吐出部に液体を供給する供給流路と、
前記ノズルが開口する閉空間を形成可能なキャップと、
一端が前記供給流路の途中に接続される分岐流路と、
一端が前記キャップに接続される排出流路と、
駆動源と、
請求項6から請求項8のうち何れか一項に記載の流路切換機構と、を備え、
前記ポンプは吸引ポンプであり、
前記分岐流路の他端は、前記第1流路と異なる2つ以上の流路のうちの第2流路に接続され、
前記排出流路の他端は、前記第1流路と異なる2つ以上の流路のうちの第3流路に接続されることを特徴とする液体吐出装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021070182A JP7600841B2 (ja) | 2021-04-19 | 2021-04-19 | 切換機構、流路切換機構及び液体吐出装置 |
| CN202210407162.1A CN115214233B (zh) | 2021-04-19 | 2022-04-18 | 切换机构、流路切换机构及液体喷出装置 |
| US17/659,520 US11951744B2 (en) | 2021-04-19 | 2022-04-18 | Switching mechanism, flow passage switching mechanism, and liquid ejecting apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021070182A JP7600841B2 (ja) | 2021-04-19 | 2021-04-19 | 切換機構、流路切換機構及び液体吐出装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022165013A JP2022165013A (ja) | 2022-10-31 |
| JP7600841B2 true JP7600841B2 (ja) | 2024-12-17 |
Family
ID=83603200
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021070182A Active JP7600841B2 (ja) | 2021-04-19 | 2021-04-19 | 切換機構、流路切換機構及び液体吐出装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11951744B2 (ja) |
| JP (1) | JP7600841B2 (ja) |
| CN (1) | CN115214233B (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2024072616A (ja) | 2022-11-16 | 2024-05-28 | セイコーエプソン株式会社 | メンテナンス装置、液体吐出装置、液体吐出装置のメンテナンス方法 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002200774A (ja) | 2000-12-28 | 2002-07-16 | Canon Inc | 液体タンクならびにこれに関する液体補給装置およびその方法ならびにヘッドカートリッジ,画像形成装置 |
| US20040119794A1 (en) | 2002-12-24 | 2004-06-24 | Samsung Electronics Co., Ltd. | Pump apparatus for ink jet printer |
| JP2007160793A (ja) | 2005-12-15 | 2007-06-28 | Seiko Epson Corp | 液体噴射装置 |
| JP2009034847A (ja) | 2007-07-31 | 2009-02-19 | Brother Ind Ltd | 画像記録装置 |
| JP2009281366A (ja) | 2008-05-26 | 2009-12-03 | Sony Corp | 液体供給装置及び液体供給装置の液体供給方法 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000071435A (ja) * | 1998-08-28 | 2000-03-07 | Toshiba Tec Corp | プリンタ |
| EP1520704A4 (en) | 2002-07-08 | 2010-02-24 | Seiko Epson Corp | "ROTOR, DRIVE CONVERSION DEVICE, CLEANING DEVICE, WIPING DEVICE AND LIQUID INJECTION DEVICE" |
| JP4479718B2 (ja) | 2003-03-07 | 2010-06-09 | セイコーエプソン株式会社 | 回転体、駆動変換装置、クリーニング装置及びインクジェット式プリンタ |
| JP4819394B2 (ja) * | 2005-05-12 | 2011-11-24 | キヤノン株式会社 | 記録ヘッドの吸引方法 |
| JP4835532B2 (ja) * | 2007-07-31 | 2011-12-14 | ブラザー工業株式会社 | 画像記録装置 |
| JP5126528B2 (ja) * | 2008-05-08 | 2013-01-23 | セイコーエプソン株式会社 | 回転軸のロック装置、およびこれを備えた記録装置 |
| JP5418765B2 (ja) | 2009-04-07 | 2014-02-19 | セイコーエプソン株式会社 | 記録装置 |
| JP5691650B2 (ja) * | 2011-03-02 | 2015-04-01 | セイコーエプソン株式会社 | 動力伝達切替装置、および液体噴射装置 |
| JP5983283B2 (ja) * | 2012-10-12 | 2016-08-31 | 株式会社リコー | 画像形成装置 |
| JP7006525B2 (ja) * | 2018-06-28 | 2022-01-24 | 株式会社デンソー | バルブ装置及び車両用清掃システム |
-
2021
- 2021-04-19 JP JP2021070182A patent/JP7600841B2/ja active Active
-
2022
- 2022-04-18 CN CN202210407162.1A patent/CN115214233B/zh active Active
- 2022-04-18 US US17/659,520 patent/US11951744B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002200774A (ja) | 2000-12-28 | 2002-07-16 | Canon Inc | 液体タンクならびにこれに関する液体補給装置およびその方法ならびにヘッドカートリッジ,画像形成装置 |
| US20040119794A1 (en) | 2002-12-24 | 2004-06-24 | Samsung Electronics Co., Ltd. | Pump apparatus for ink jet printer |
| JP2007160793A (ja) | 2005-12-15 | 2007-06-28 | Seiko Epson Corp | 液体噴射装置 |
| JP2009034847A (ja) | 2007-07-31 | 2009-02-19 | Brother Ind Ltd | 画像記録装置 |
| JP2009281366A (ja) | 2008-05-26 | 2009-12-03 | Sony Corp | 液体供給装置及び液体供給装置の液体供給方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN115214233B (zh) | 2025-11-14 |
| US20220332122A1 (en) | 2022-10-20 |
| CN115214233A (zh) | 2022-10-21 |
| JP2022165013A (ja) | 2022-10-31 |
| US11951744B2 (en) | 2024-04-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6402289B2 (en) | Liquid jet apparatus with a drive source for driving a cap and a suction device | |
| JP3464086B2 (ja) | 記録装置における駆動伝達切換機構 | |
| JP7600841B2 (ja) | 切換機構、流路切換機構及び液体吐出装置 | |
| JP2009274304A (ja) | 動力伝達切換装置、記録装置 | |
| JP6500593B2 (ja) | メンテナンス装置及び液体噴射装置 | |
| JP7615813B2 (ja) | 間欠駆動装置 | |
| JP4334687B2 (ja) | インクジェット記録装置 | |
| US4410289A (en) | Serial printer | |
| JP6394467B2 (ja) | 液体吐出装置 | |
| US9475317B2 (en) | Power transmission switching device and liquid ejection apparatus | |
| JP3082818B2 (ja) | インクジェット記録装置 | |
| JP2010000650A (ja) | 液体噴射装置 | |
| JP3879834B2 (ja) | 記録媒体供給用の駆動力伝達装置及び記録装置 | |
| JP3800311B2 (ja) | 記録装置 | |
| JP4371547B2 (ja) | インクジェット記録装置 | |
| JP2000272145A (ja) | 記録装置 | |
| JP3363460B2 (ja) | 記録装置 | |
| JP4877508B2 (ja) | 記録装置 | |
| JP6582490B2 (ja) | 液体吐出装置 | |
| JP2003080719A (ja) | インクジェット記録装置 | |
| JP2006199503A (ja) | 記録装置 | |
| JP2002200763A (ja) | インクジェット記録ヘッドワイピング装置、インクジェット記録ヘッドメンテナンス装置及びインクジェット記録装置 | |
| JPH0825653A (ja) | インクジェットプリント装置 | |
| JP2891959B2 (ja) | インクリボン装置 | |
| JP6040657B2 (ja) | 液体吐出装置および画像形成装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20210917 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20211104 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240315 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20241029 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20241105 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20241118 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7600841 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |