JP7600944B2 - 車両用サスペンション制御装置、及び車両用サスペンション制御方法 - Google Patents
車両用サスペンション制御装置、及び車両用サスペンション制御方法 Download PDFInfo
- Publication number
- JP7600944B2 JP7600944B2 JP2021156015A JP2021156015A JP7600944B2 JP 7600944 B2 JP7600944 B2 JP 7600944B2 JP 2021156015 A JP2021156015 A JP 2021156015A JP 2021156015 A JP2021156015 A JP 2021156015A JP 7600944 B2 JP7600944 B2 JP 7600944B2
- Authority
- JP
- Japan
- Prior art keywords
- control
- control amount
- actuator
- vehicle
- amount
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Landscapes
- Vehicle Body Suspensions (AREA)
Description
図1は、実施の形態に係る車両1の構成の一例を概略的に示す図である。車両1は、車輪2とサスペンション3を備えている。車輪2は、左前輪2FL、右前輪2FR、左後輪2RL、及び右後輪2RRを含んでいる。それら左前輪2FL、右前輪2FR、左後輪2RL、及び右後輪2RRのそれぞれに対してサスペンション3FL、3FR、3RL、及び3RRが設けられている。以下の説明では、特に区別の必要が無い場合、各車輪を車輪2と呼び、各サスペンションをサスペンション3と呼ぶ。
車両1の姿勢制御である車両姿勢制御は、車両操作入力に対する第1姿勢制御、及び、路面入力に対する第2姿勢制御の少なくとも一方を含む。本実施形態では、車両姿勢制御として、第1姿勢制御及び第2姿勢制御が組み合わされて実行される。
車両操作入力に対する第1姿勢制御は、車両1の操舵に伴う旋回時のロール制御、及び車両1の加減速に伴うピッチ制御の少なくとも一方を含む。本実施形態では、第1姿勢制御として、ロール制御及びピッチ制御が組み合わされて実行される。
路面入力に対する第2姿勢制御(換言すると、乗り心地制御)は、路面入力に対するばね上構造体5の振動(より詳細には、上下振動)を低減する振動制御を含む。このような振動制御は、車両1の乗り心地の改善のために、路面入力に伴うばね上構造体5の姿勢(挙動)の変化を抑制する制御ともいうことができる。
m・Zs''=C(Zu'-Zs')+K(Zu-Zs)-Fc ・・・(1)
Fc=C・Zu'+K・Zu ・・・(2)
Fc=α・C・Zu'+β・K・Zu ・・・(3)
Fc=β・K・Zu ・・・(4)
本実施形態では、応答性と出力とを両立しつつ車両姿勢制御を行えるようにするために、ECU10は、次のような「算出処理」及び「指令処理」を実行する。すなわち、ECU10は、車両姿勢制御のための要求制御量Xを算出する算出処理を実行する。そして、ECU10は、第1アクチュエータ3A1が出力可能な第1制御量X1の最大値である第1最大制御量X1maxだけでは要求制御量Xに対する制御量の不足がある場合には、第1最大制御量X1maxを第1アクチュエータ3A1に指令し、かつ、当該不足を補うための第2制御量X2を第2アクチュエータ3A2に指令する指令処理を実行する。
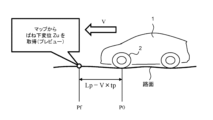
ステップS100において、ECU10は、要求制御量Xを算出する。要求制御量Xは、車両1において行われる車両姿勢制御全体の(トータルの)要求制御量である。具体的には、ステップS100において、ECU10は、第1姿勢制御に含まれるロール制御及びピッチ制御のためのロール要求制御量Xr及びピッチ要求制御量Xpをそれぞれ算出する。また、ECU10は、第2姿勢制御の一例であるプレビュー制御のための要求制御量Xpvを算出する。そして、ECU10は、算出した要求制御量Xr、Xp、及びXpvの和をトータルの要求制御量Xとして算出する。
Xr=LA×Gr ・・・(5)
Xp=FA×Gp ・・・(6)
次に、ステップS102において、ECU10は、第1アクチュエータ3A1で出力可能な第1最大制御量X1maxを算出する。より詳細には、第1最大制御量X1maxは、第1制御量X1が時間の経過とともに変化している時を含めて第1アクチュエータ3A1が出力可能な最大の第1制御量X1に相当する。ステップS102では、ECU10は、次回のサンプル時刻(k+1)において出力可能な第1最大制御量X1maxを算出する。
次に、ステップS104において、ECU10は、第1アクチュエータ3A1が出力可能な第1最大制御量X1maxだけでは要求制御量Xに対する制御量の不足があるか否かを判定する。この判定は、例えば、差分ΔX1がゼロでないか否かに基づいて行うことができる。差分ΔX1は、ステップS100にて算出した要求制御量XからステップS102にて算出した第1最大制御量X1maxを引くことにより得られる値(=X-X1max)である。
ステップS104の判定結果がNoである場合(すなわち、制御量の不足がない場合)には、処理はステップS106に進む。例えば要求制御量Xが図5中に破線で表されるものであると、この判定結果がNoとなる。ステップS106では、ECU10は、ステップS100にて算出した要求制御量Xに等しい第1制御量X1を第1アクチュエータ3A1に指令する。その結果、第1アクチュエータ3A1は、指令された要求制御量Xに応じた制御力Fc1を発生させるように制御される。
一方、ステップS104の判定結果がYesである場合(すなわち、制御量の不足がある場合)には、処理はステップS108に進む。例えば要求制御量Xが図5中に実線で表されるものであると、この判定結果がYesとなる。
ステップS108に続くステップS110では、ECU10は、ステップS102にて算出した第1最大制御量X1maxを第1制御量X1として第1アクチュエータ3A1に指令するとともに、ステップS108にて算出した第2制御量X2を第2アクチュエータ3A2に指令する。その結果、第1アクチュエータ3A1は、指令された第1最大制御量X1maxに応じた制御力Fc1を発生させるように制御される。また、第2アクチュエータ3A2は、指令された第2制御量X2に応じた制御力Fc2を発生させるように制御される。
車両の姿勢を制御するためには、大きな力が必要となる。しかしながら、一般的に、アクティブサスペンションのアクチュエータの応答性と出力は、相反する関係にあり、両立させることが難しい。より詳細には、一般的には、応答性を重視した場合、アクチュエータの出力は小さくなる。その結果、車両操作入力に対する第1姿勢制御(すなわち、操舵に対するロール制御、及び、加減速に対するピッチ制御)を満足に行うことが難しくなる。このことは、路面入力に対する第2姿勢制御(乗り心地制御)についても同様であり、大きな路面振幅に対して乗り心地制御を満足に行うことも難しくなる。一方、出力を重視した場合、第1姿勢制御(ロール及びピッチ制御)において要求制御量Xr及びXpが過渡的に変化する時に、これらの制御の応答性を満足に確保することが難しくなる。同様に、急な路面変化に対して乗り心地制御の応答性を満足に確保することが難しくなる。
本開示に係る「車両姿勢制御」の実施に関し、下記のように補足説明を行う。
図4を参照して説明した例に代え、車両操作入力に対する第1姿勢制御と路面入力に対する第2姿勢制御の何れか一方のみが車両姿勢制御として実行されてもよい。具体例には、例えば、第1姿勢制御に含まれるロール制御及びピッチ制御の少なくとも一方のみが実行されてもよい。また、プレビュー制御等の路面入力に対する第2姿勢制御のみが実行されてもよい。
図1及び図2に示す例における第1アクチュエータ3A1は、4つの車輪2のそれぞれに対して配置されている。第1アクチュエータ3A1に代え、本開示に係る「第1アクチュエータ」は、例えば、アクティブスタビライザ装置(例えば、特開2013-001225号公報参照)のアクチュエータ(例えば、電動モータ)であってもよい。以下、このアクチュエータを、便宜上「第1アクチュエータ3A1’」と称する。
図1及び図2に示す例のように、本開示に係る「第1アクチュエータ」の制御対象輪は、「第2アクチュエータ」の制御対象輪と同一であってもよい(すなわち、これらの双方の制御対象輪が本開示に係る「第1制御対象輪」に相当していてもよい)。ただし、「第1アクチュエータ」及び「第2アクチュエータ」の制御対象輪が同一である場合、制御対象輪は、車両の全輪に限られず、例えば、左右前輪のみ、又は左右後輪のみであってもよい。
例えば、上述のように左右前輪及び左右後輪の一方に「第1アクチュエータ」が適用され、その他方に「第2アクチュエータ」が適用される例では、車両の前後でアクチュエータの応答性が異なるものとなる。
2 車輪
3 サスペンション
3A1 第1アクチュエータ(高出力かつ低応答)
3A2 第2アクチュエータ(高応答かつ低出力)
5 ばね上構造体
10 電子制御ユニット(ECU)
12 センサ類
14 通信装置
Claims (7)
- 第1制御対象輪のサスペンションストロークを制御する第1アクチュエータと、
前記第1制御対象輪又は前記第1制御対象輪と異なる第2制御対象輪のサスペンションストロークを制御し、前記第1アクチュエータと比べて高い応答性と低い出力を有する第2アクチュエータと、
電子制御ユニットと、
を備える車両用サスペンション制御装置であって、
前記電子制御ユニットは、
車両姿勢制御のための要求制御量を算出する算出処理と、
前記第1アクチュエータが出力可能な第1制御量の最大値である第1最大制御量だけでは前記要求制御量に対する制御量の不足がある場合には、前記第1最大制御量を前記第1アクチュエータに指令し、かつ、前記不足を補うための第2制御量を前記第2アクチュエータに指令する指令処理と、
を実行し、
前記車両姿勢制御は、車両操作入力に対する第1姿勢制御、及び、路面入力に対する第2姿勢制御の少なくとも一方を含み、
前記要求制御量は、前記第1姿勢制御のための第1要求制御量、及び、前記第2姿勢制御のための第2要求制御量の少なくとも一方を含む
ことを特徴とする車両用サスペンション制御装置。 - 前記車両姿勢制御は、前記第1姿勢制御及び前記第2姿勢制御の双方を含み、
前記算出処理において、前記電子制御ユニットは、前記第1要求制御量と前記第2要求制御量との和を前記要求制御量として算出する
ことを特徴とする請求項1に記載の車両用サスペンション制御装置。 - 前記第1姿勢制御は、前記車両のロール制御を含み、
前記第1要求制御量は、前記ロール制御のためのロール要求制御量を含む
ことを特徴とする請求項1又は2に記載の車両用サスペンション制御装置。 - 前記第1アクチュエータが適用される前記第1制御対象輪は、前記車両の左右前輪及び左右後輪の一方であって、
前記第2アクチュエータは前記第2制御対象輪に適用され、前記第2制御対象輪は前記車両の左右前輪及び左右後輪の他方であって、
前記算出処理において、前記電子制御ユニットは、前記車両の全輪の合計のロール要求制御量を前記要求制御量として算出する
ことを特徴とする請求項3に記載の車両用サスペンション制御装置。 - 前記第1姿勢制御は、前記車両のピッチ制御を含み、
前記第1要求制御量は、前記ピッチ制御のためのピッチ要求制御量を含む
ことを特徴とする請求項1~4の何れか1つに記載の車両用サスペンション制御装置。 - 前記第2姿勢制御は、前記路面入力に対する前記車両のばね上構造体の振動を低減する振動制御を含み、
前記第2要求制御量は、前記振動制御のための要求制御量を含む
ことを特徴とする請求項1~5の何れか1つに記載の車両用サスペンション制御装置。 - 前記指令処理において、前記電子制御ユニットは、前記第1アクチュエータの第1制御量だけで前記要求制御量を満たせる場合には、前記要求制御量のすべてを前記第1アクチュエータに指令し、かつ、前記第2アクチュエータへの前記要求制御量に関する指令は行わない
ことを特徴とする請求項1~6の何れか1つに記載の車両用サスペンション制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021156015A JP7600944B2 (ja) | 2021-09-24 | 2021-09-24 | 車両用サスペンション制御装置、及び車両用サスペンション制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021156015A JP7600944B2 (ja) | 2021-09-24 | 2021-09-24 | 車両用サスペンション制御装置、及び車両用サスペンション制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2023047085A JP2023047085A (ja) | 2023-04-05 |
| JP7600944B2 true JP7600944B2 (ja) | 2024-12-17 |
Family
ID=85778166
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021156015A Active JP7600944B2 (ja) | 2021-09-24 | 2021-09-24 | 車両用サスペンション制御装置、及び車両用サスペンション制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7600944B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2025036995A (ja) * | 2023-09-05 | 2025-03-17 | トヨタ自動車株式会社 | 車両挙動制御装置、車両挙動制御方法 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005119563A (ja) | 2003-10-17 | 2005-05-12 | Toyota Motor Corp | 車両懸架装置 |
| JP2006117210A (ja) | 2004-10-25 | 2006-05-11 | Toyota Motor Corp | 車両懸架装置 |
| JP2012066682A (ja) | 2010-09-22 | 2012-04-05 | Toyota Motor Corp | 車両用ロール制御システム |
| US20190023095A1 (en) | 2015-12-18 | 2019-01-24 | Jaguar Land Rover Limited | Control unit for an active suspension system |
-
2021
- 2021-09-24 JP JP2021156015A patent/JP7600944B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005119563A (ja) | 2003-10-17 | 2005-05-12 | Toyota Motor Corp | 車両懸架装置 |
| JP2006117210A (ja) | 2004-10-25 | 2006-05-11 | Toyota Motor Corp | 車両懸架装置 |
| JP2012066682A (ja) | 2010-09-22 | 2012-04-05 | Toyota Motor Corp | 車両用ロール制御システム |
| US20190023095A1 (en) | 2015-12-18 | 2019-01-24 | Jaguar Land Rover Limited | Control unit for an active suspension system |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2023047085A (ja) | 2023-04-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20220048353A1 (en) | Roll vibration damping control system for vehicle, target roll moment computing method therefor, and non-transitory computer-readable storage medium | |
| JP5809474B2 (ja) | 車体姿勢制御装置 | |
| US12017497B2 (en) | Vehicle control device | |
| US7788011B2 (en) | Braking and drive force control apparatus for a vehicle | |
| CN113752772B (zh) | 减振控制装置以及减振控制方法 | |
| KR20110014078A (ko) | 서스펜션 제어 장치 | |
| KR20220034194A (ko) | 차량 운동 제어 장치 | |
| US11712939B2 (en) | Vehicle and method of controlling vehicle suspension | |
| JP7600947B2 (ja) | 車両用サスペンション制御装置、及び車両用サスペンション制御方法 | |
| JP7600944B2 (ja) | 車両用サスペンション制御装置、及び車両用サスペンション制御方法 | |
| JP2022191964A (ja) | 車両運動制御装置、車両運動制御システムおよび車両 | |
| JP4821766B2 (ja) | 車両用サスペンションシステム | |
| JP7655173B2 (ja) | 車両、及び車両用サスペンションの制御方法 | |
| US20250128562A1 (en) | Vehicle control device and vehicle control system | |
| JP2009073239A (ja) | サスペンション制御装置 | |
| JP7838540B2 (ja) | サスペンション制御システム | |
| JP2009226985A (ja) | 車体姿勢制御装置 | |
| JP2025030719A (ja) | サスペンション制御システム | |
| JP2007203810A (ja) | ブレーキ制御装置 | |
| JP2011140303A (ja) | ブレーキ制御装置 | |
| CN113246676A (zh) | 用于车辆的连续可变刚度流体弹簧系统及其操作方法 | |
| JP7831133B2 (ja) | 車両制御装置 | |
| JP5104594B2 (ja) | 車両制御装置 | |
| US20250326267A1 (en) | Motor vehicle with active suspensions and control method of the motor vehicle | |
| JP2024168897A (ja) | 車両制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240214 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20240919 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20241001 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20241003 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20241105 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20241118 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7600944 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |