JP7601172B2 - Lane change assistance device, lane change assistance method, and program - Google Patents
Lane change assistance device, lane change assistance method, and program Download PDFInfo
- Publication number
- JP7601172B2 JP7601172B2 JP2023171603A JP2023171603A JP7601172B2 JP 7601172 B2 JP7601172 B2 JP 7601172B2 JP 2023171603 A JP2023171603 A JP 2023171603A JP 2023171603 A JP2023171603 A JP 2023171603A JP 7601172 B2 JP7601172 B2 JP 7601172B2
- Authority
- JP
- Japan
- Prior art keywords
- lane change
- section
- information
- lane
- recommended
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title description 27
- 230000006870 function Effects 0.000 claims description 15
- 238000001514 detection method Methods 0.000 claims description 8
- 230000015572 biosynthetic process Effects 0.000 claims description 3
- 238000010586 diagram Methods 0.000 description 30
- 230000003068 static effect Effects 0.000 description 16
- 238000004891 communication Methods 0.000 description 9
- 230000001133 acceleration Effects 0.000 description 6
- 238000004364 calculation method Methods 0.000 description 3
- 238000005516 engineering process Methods 0.000 description 3
- 239000003550 marker Substances 0.000 description 3
- 238000005401 electroluminescence Methods 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 1
- 238000004590 computer program Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 230000008014 freezing Effects 0.000 description 1
- 238000007710 freezing Methods 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
Images











Landscapes
- Traffic Control Systems (AREA)
Description
本発明は、車線変更支援装置、車線変更支援方法、プログラムに関する。 The present invention relates to a lane change assistance device, a lane change assistance method, and a program.
近年、隊列を組んで車両を走行させる技術が検討されている。隊列を組んで車両を走行させることにより、車両の燃費向上、輸送量の増加等の効果が見込まれる。複数台の車両が隊列走行する場合には通常の車両よりも隊列が長くなり、さらには車両数や車種によってその長さが変化するため習熟が難しく、車線変更には通常よりも大きな車間距離が望ましいと考えられる。 In recent years, technology that allows vehicles to travel in a convoy has been under consideration. By traveling in a convoy, it is expected that the effects of improving fuel efficiency and increasing transport volume will be achieved. When multiple vehicles travel in a convoy, the convoy will be longer than normal vehicles, and since the length of the convoy varies depending on the number and type of vehicles, it is difficult to master, and it is thought that a larger distance between vehicles than usual is desirable when changing lanes.
特許文献1には車両群形成による隊列走行を維持しながら、追越しを円滑に行うための技術が開示されている。
上述のように車両が隊列走行する場合、隊列走行する車両の安全な車線変更を支援することが望まれている。 As mentioned above, when vehicles travel in a convoy, it is desirable to assist the vehicles in the convoy in changing lanes safely.
そこでこの発明は、上述の課題を解決する車線変更支援装置、車線変更支援方法、プログラムを提供することを目的としている。 The present invention aims to provide a lane change assistance device, lane change assistance method, and program that solve the above-mentioned problems.
発明の第1の態様によれば、車線変更支援装置は、走行経路の分岐地点に到達する直前の走行区間における隊列走行する車両の推奨走行車線の情報を少なくとも含む車線変更推奨区間情報を取得する取得部と、前記隊列走行する車両が前記走行区間を走行しているときに現在の前記隊列走行する車両の走行車線を検知する検知部と、前記現在の前記隊列走行する車両の走行車線が、前記車線変更推奨区間情報に含まれる推奨走行車線に一致しない場合に、前記隊列走行する車両に関する隊列情報に基づいて、車線変更が容易であることを通知する通知情報を出力する車線変更通知部と、を備えることを特徴とする。 According to a first aspect of the invention, the lane change assistance device is characterized by comprising: an acquisition unit that acquires lane change recommended section information including at least information on the recommended driving lane of the vehicles traveling in the platoon in the driving section immediately before reaching a branch point of the driving route; a detection unit that detects the current driving lane of the vehicles traveling in the platoon while the vehicles traveling in the platoon are traveling in the driving section; and a lane change notification unit that outputs notification information notifying that a lane change is easy based on the platoon information regarding the vehicles traveling in the platoon when the current driving lane of the vehicles traveling in the platoon does not match the recommended driving lane included in the lane change recommended section information.
発明の第2の態様によれば、車線変更支援方法は、走行経路の分岐地点に到達する直前の走行区間における隊列走行する車両の推奨走行車線の情報を少なくとも含む車線変更推奨区間情報を取得し、前記隊列走行する車両が前記走行区間を走行しているときに現在の前記隊列走行する車両の走行車線を検知し、前記現在の前記隊列走行する車両の走行車線が、前記車線変更推奨区間情報に含まれる推奨走行車線に一致しない場合に、前記隊列走行する車両に関する隊列情報に基づいて、車線変更が容易であることを通知する通知情報を出力することを特徴とする。 According to a second aspect of the invention, the lane change assistance method is characterized in that it acquires recommended lane change section information including at least information on the recommended driving lane of the vehicles traveling in a platoon in a driving section immediately before reaching a branch point of a driving route, detects the current driving lane of the vehicles traveling in the platoon while the vehicles traveling in the platoon are traveling in the driving section, and outputs notification information notifying that a lane change is easy based on the platoon information regarding the vehicles traveling in the platoon when the current driving lane of the vehicles traveling in the platoon does not match the recommended driving lane included in the recommended lane change section information.
発明の第3の態様によれば、プログラムは、車線変更支援装置のコンピュータを、走行経路の分岐地点に到達する直前の走行区間における隊列走行する車両の推奨走行車線の情報を少なくとも含む車線変更推奨区間情報を取得する取得手段、前記隊列走行する車両が前記走行区間を走行しているときに現在の前記隊列走行する車両の走行車線を検知する検知手段、前記現在の前記隊列走行する車両の走行車線が、前記車線変更推奨区間情報に含まれる推奨走行車線に一致しない場合に、前記隊列走行する車両に関する隊列情報に基づいて、車線変更が容易であることを通知する通知情報を出力する車線変更通知手段、として機能させることを特徴とする。 According to a third aspect of the invention, the program causes the computer of the lane change assistance device to function as: an acquisition means for acquiring lane change recommended section information including at least information on the recommended driving lane of the vehicles traveling in a platoon in a driving section immediately before reaching a branch point of the driving route; a detection means for detecting the current driving lane of the vehicles traveling in the platoon while the vehicles traveling in the platoon are traveling in the driving section; and a lane change notification means for outputting notification information notifying that a lane change is easy based on the platoon information regarding the vehicles traveling in the platoon when the current driving lane of the vehicles traveling in the platoon does not match the recommended driving lane included in the lane change recommended section information.
本発明によれば、隊列走行する車両の安全な車線変更を支援することができる。 The present invention can assist vehicles traveling in a convoy in changing lanes safely.
以下、本発明の一実施形態による車線変更支援装置を、図面を参照して説明する。
図1は同実施形態による車線変更支援装置を備えた車両管理システムの構成を示す図である。
図1で示すように車両管理システム100は、一例としては、隊列を組んで走行(以下、「隊列走行」とする。)する複数台の車両1それぞれに搭載された車載器10、路側機2、車両管理装置3を含んで構成される。
DETAILED DESCRIPTION OF THE PREFERRED EMBODIMENTS A lane change assist device according to an embodiment of the present invention will now be described with reference to the drawings.
FIG. 1 is a diagram showing the configuration of a vehicle management system equipped with a lane change assist device according to the embodiment.
As shown in FIG. 1, the
車両管理装置3は隊列走行する車両1を管理するサーバ装置である。車両管理装置3は、各道路の各地点における渋滞状況や事故情報や混雑情報等を、交通状況配信サーバから取得し、データベース等に記録している。なお、交通状況配信サーバは、図1に図示していないが、車両管理システム100外に存在し、車両管理装置3に通信接続されているものとする。また車両管理装置3は路側機2と通信接続する。また車両管理装置3と車載器10とはインターネットや携帯電話回線などの公衆通信ネットワークを介して接続することができ、車両管理装置3は車載器10と直接、情報を送受信することができる。
The vehicle management device 3 is a server device that manages the
路側機2は隊列走行する道路の路肩等に設置されている。路側機2は車両1が通過したことを検知する通過検知機能と、車両1に搭載された車載器10や車両管理装置3と通信する通信機能とを有する。路側機2は車載器10との通信接続に基づいて車載器10から受信した情報を車両管理装置3へ送信する。また路側機2は、車両管理装置3から受信した情報を車載器10へ送信することができる。
The roadside unit 2 is installed on the shoulder of the road on which the platoon travels. The roadside unit 2 has a passage detection function that detects when the
車線変更支援装置の一態様である車載器10は、隊列走行を実施するための機能を有する。例えば車載器10は、自車の一つ前の位置で隊列走行に参加する車両(前方車両)1を追尾走行するために前方車両との距離や位置を検出する機能、当該検出を行うためのレーダの送受信を制御する機能、当該検出結果に基づいて車両1の速度や進行方向を制御する機能を備えてよい。また車載器10は、車両管理装置3から受信した情報に基づいて隊列走行を実施するための各処理を行うための機能を有してよい。なお車載器10が、隊列走行を実施するための処理は公知の技術を用いるものとする。
The vehicle-mounted
図2は車載器のハードウェア構成を示す図である。
車載器10は、制御装置11、通信装置12、カメラ13、位置センサ14、表示装置15、音声出力装置16、入力装置17、測定器18などを含んで構成される。
FIG. 2 is a diagram showing the hardware configuration of the vehicle-mounted device.
The vehicle-mounted
制御装置11は車載器10の各機能を制御する。
通信装置12は路側機2また車両管理装置3と通信接続する。
カメラ13は車両1の外部や内部を撮影して動画像、静止画像を生成する。
位置センサ14はGPS(Global Positioning System)により車両1(車載器10)の位置情報を取得する。
表示装置15は液晶ディスプレイや有機EL(Electro-Luminescence)ディスプレイ、各種ランプ等であり、種々の情報を表示する。
音声出力装置16はスピーカにより音声を出力する。
入力装置17は表示装置15の表示面に設置されたタッチパネルや各種ボタンであり、入力を受け付ける。
測定器18はレーダ等により周囲を走行している車両の速度や加速度や位置を測定する。
The
The
The
The
The
The audio output device 16 outputs audio through a speaker.
The
The
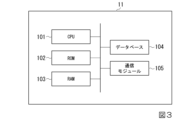
図3は車載器の制御装置のハードウェア構成図である。
この図が示すように制御装置11はCPU(Central Processing Unit)101、ROM(Read Only Memory)102、RAM(Random Access Memory)103、データベース104、通信モジュール105等の各ハードウェアを備えたコンピュータである。
FIG. 3 is a hardware configuration diagram of the control device of the vehicle-mounted device.
As shown in this figure, the
図4は車載器の制御装置の機能ブロック図である。
車載器10の制御装置11は電源が投入されると起動し、予め記憶する車線変更支援プログラムを実行する。これにより制御装置11は、制御部111、車線変更推奨区間生成部112、車線変更推奨区間通知部113、車線変更通知部114、静的推奨区間生成情報記憶部115、動的推奨区間生成情報記憶部116、動的推奨区間生成情報取得部117、生成情報記憶部118の各機能を発揮する。
FIG. 4 is a functional block diagram of the control device of the vehicle-mounted device.
When the
制御部111は制御装置11の各機能部を制御する。
車線変更推奨区間生成部112は、地図情報に基づいて現在位置から目的地までの走行経路を生成する。そして車線変更推奨区間生成部112は、走行経路における分岐地点に到達する直前の走行区間における車両1の推奨走行車線を少なくとも含み、車線変更を推奨する推奨区間を示す車線変更推奨区間情報を生成する。
車線変更推奨区間通知部113は、車線変更推奨区間情報を取得し、車線変更推奨区間情報に含まれる推奨区間を示す通知情報を出力する。
The
The lane-change recommended
The recommended lane change
車線変更通知部114は、車線変更推奨区間情報を取得し、走行経路における分岐地点に到達する直前の走行区間を車両が走行しているときに現在の車両の走行車線を検知し、現在の車両の走行車線が、車線変更推奨区間情報に含まれる推奨走行車線に一致しない場合に、車線変更が容易であるか否かを通知する通知情報を出力する。車線変更通知部114は、さらに、車両1の現在位置における車線変更の難易度を算出し、当該難易度に基づいて、通知情報を出力する。
The lane
静的推奨区間生成情報記憶部115は、車線変更推奨区間情報を生成するための推奨区間生成情報のうち、道路状況に応じて変化しない静的推奨区間生成情報を記憶する。例えば静的推奨区間生成情報には、地図情報、車両1の運転者に関する運転者情報、車両1が組む隊列に関する隊列情報、及び、過去に実施した車線変更に関する過去の車線変更情報が含まれる。
動的推奨区間生成情報記憶部116は、車線変更推奨区間情報を生成するための推奨区間生成情報のうち、道路状況に応じて変化する動的推奨区間生成情報を記憶する。例えば動的推奨区間生成情報には、車両1の現在位置、進行方向の渋滞状況、進行方向の事故情報、及び、隊列周囲の混雑情報が含まれる。
動的推奨区間生成情報取得部117は、位置センサ14や測定器18や車両管理装置3から動的推奨区間生成情報を取得する。例えば動的推奨区間生成情報取得部117は、所定時間毎に位置センサ14から車両1の現在位置を取得する。また動的推奨区間生成情報取得部117は、所定時間毎に測定器18により周囲の混雑状況を測定する。また動的推奨区間生成情報取得部117は、車両管理装置3から進行方向の渋滞状況、進行方向の事故情報、及び隊列周囲の混雑情報を取得する。動的推奨区間生成情報取得部117は、動的推奨区間生成情報を車両管理装置3から所定時間毎に取得してもよいし、動的推奨区間生成情報が更新された(例えば渋滞や事故が発生した)ときに車両管理装置3から送信されたものを受信してもよい。
生成情報記憶部118は、車線変更推奨区間生成部112が生成した走行経路を示す情報、及び車線変更推奨区間情報を記憶する。
The static recommended section generation
The dynamic recommended section generation
The dynamic recommended section generation
The generated
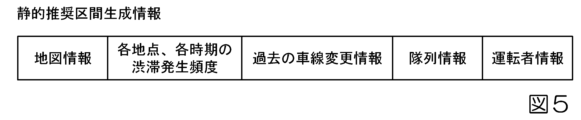
図5は静的推奨区間生成情報の一例を示す概略図である。
図示するように、静的推奨区間生成情報は、地図情報と、各地点、各時期の渋滞発生頻度と、過去の車線変更情報と、隊列情報と、運転者情報とを含む。各地点、各時期の渋滞発生頻度は、各地点における各時期それぞれの渋滞の発生頻度である。過去の車線変更情報は、過去に実施した車線変更に関する情報である。隊列情報は、車両1が組む隊列に関する情報である。運転者情報は、車両1の運転者に関する情報である。
FIG. 5 is a schematic diagram showing an example of the static recommended section generation information.
As shown in the figure, the static recommended section generation information includes map information, the frequency of congestion at each location and each time period, past lane change information, platoon information, and driver information. The frequency of congestion at each location and each time period is the frequency of congestion at each location and each time period. The past lane change information is information regarding lane changes that have been performed in the past. The platoon information is information regarding the platoon in which
図6は隊列情報の一例を示す概略図である。
図示するように、隊列情報は、隊列の長さと、車両数と、走行時の混雑状況、速度状況などの各道路状況での車間距離と、車線変更に必要な時間の予測値とを含む。車両数は、隊列に所属する車両1の数である。各状況での車間距離は、例えば各速度や車線変更時それぞれの状況における各車両1の車間距離である。また車線変更に必要な時間の予測値は、車線変更の方法や他の隊列情報等に応じた車線変更に必要な時間の予測値である。
FIG. 6 is a schematic diagram showing an example of formation information.
As shown in the figure, the platoon information includes the length of the platoon, the number of vehicles, the vehicle distance under each road condition such as congestion during travel and speed, and the predicted value of the time required for lane change. The number of vehicles is the number of
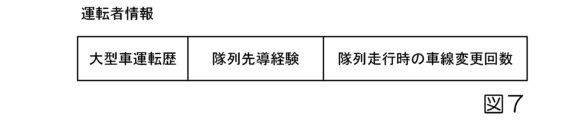
図7は運転者情報の一例を示す概略図である。
図示するように、運転者情報は、大型車運転歴と、隊列先導経験と、過去の隊列走行時の車線変更回数とを含む。
FIG. 7 is a schematic diagram showing an example of the driver information.
As shown in the figure, the driver information includes a history of driving a large vehicle, experience of leading a convoy, and the number of lane changes made while traveling in a convoy in the past.
図8は過去の車線変更情報の一例を示す概略図である。
図示するように、過去の車線変更情報は、日時情報と、位置情報と、道路状況と、車線変更にかかった時間と、運転者情報と、隊列情報との各項目を有するテーブルである。道路状況は、例えば凍結、カーブ、傾斜、渋滞等である。過去の車線変更情報は、実施した車線変更毎に各項目のデータを対応付けて記憶する。なお過去の車線変更情報は、上述した各項目の情報を位置毎や道路状況毎にクラス分けし、平均化した値であってもよい。
FIG. 8 is a schematic diagram showing an example of past lane change information.
As shown in the figure, the past lane change information is a table having items such as date and time information, position information, road conditions, time required for lane change, driver information, and convoy information. Road conditions include, for example, freezing, curves, inclines, and congestion. The past lane change information is stored by associating each item of data with each lane change that has been performed. Note that the past lane change information may be an average value obtained by classifying the information of each of the above items by position or road conditions.
図9は動的推奨区間生成情報の一例を示す概略図である。
図示するように、動的推奨区間生成情報は、隊列の現在位置と、進行方向の渋滞状況と、進行方向の事故情報と、隊列周囲の混雑情報とを含む。
FIG. 9 is a schematic diagram illustrating an example of the dynamic recommended section generation information.
As shown in the figure, the dynamic recommended section generation information includes the current position of the convoy, the traffic congestion situation in the traveling direction, accident information in the traveling direction, and congestion information around the convoy.
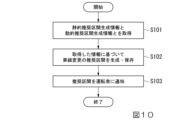
図10は車載器の処理フローを示す第一の図である。
次に、車載器10による処理を説明する。
以下、複数台の車両1が隊列を組み、隊列走行を開始する場合について説明する。各車両1は隊列走行を実施するための当該隊列の位置(隊列における所定の順序に基づく位置)に停車している。運転者は車両1に備わる車載器10を操作して隊列走行を実施するための処理の開始を指示する。この時、車載器10は、隊列走行の開始制御を始動する。そして運転者は隊列走行の先頭に位置する車両1には乗り込む。隊列走行の先頭を走行する車両1以外の後続の車両1には運転者は乗車してもよいし、乗車しなくてもよい。
FIG. 10 is a first diagram showing a processing flow of the vehicle-mounted unit.
Next, the process performed by the vehicle-mounted
Below, a case will be described in which
運転者は隊列走行開始前の車両1の停車中に、車載器10に目的地を入力する。車載器10の入力装置17は目的地の入力を受け付ける。そして車載器10の制御装置11が、現在位置から目的地までの走行経路を算出する。運転者は走行経路に基づいて隊列走行する各車両1の先頭の車両を運転する。走行中において、車載器10の制御装置11が、現在位置から目的地までの走行経路において車線変更を推奨する推奨区間を運転者に通知する。
The driver inputs the destination into the vehicle-mounted
より詳細には、まず車線変更推奨区間生成部112は、静的推奨区間生成情報及び動的推奨区間生成情報を取得する(ステップS101)。具体的には、まず動的推奨区間生成情報取得部117が動的推奨区間生成情報を要求する動的推奨区間生成情報要求を生成する。動的推奨区間生成情報要求は、現在位置から目的地までの走行経路にある道路を特定する道路IDを含む。そして動的推奨区間生成情報取得部117は、動的推奨区間生成情報要求を車両管理装置3に送信する。車両管理装置3は、動的推奨区間生成情報要求に含まれる道路IDを取得する。車両管理装置3は取得した道路IDに紐づいてデータベース等に記録されている動的推奨区間生成情報を取得する。動的推奨区間生成情報は、車両管理装置3が予め、交通状況配信サーバ等の他の装置から取得した情報、または予め各種センサから得た情報に基づいて算出し、自装置に登録された情報であってよい。車両管理装置3は、取得した動的推奨区間生成情報を車載器10へ送信する。車載器10は、動的推奨区間生成情報を受信する。車載器10の動的推奨区間生成情報取得部117は、動的推奨区間生成情報を動的推奨区間生成情報記憶部116に書き込む。車線変更推奨区間生成部112は、動的推奨区間生成情報記憶部116から動的推奨区間生成情報を読み出す。また車線変更推奨区間生成部112は、静的推奨区間生成情報記憶部115から静的推奨区間生成情報を読み出す。
More specifically, the lane change recommended
なお、上述の動的推奨区間生成情報取得部117の処理は、予め行われていてもよい。例えば動的推奨区間生成情報取得部117は、全国の各道路の所定区間ごとに動的推奨区間生成情報を順次取得し、全国の各道路の所定区間ごとに動的推奨区間生成情報記憶部116に記録しておいてもよい。
The above-mentioned processing of the dynamic recommended section generation
続いて車線変更推奨区間生成部112は、取得した静的推奨区間生成情報及び動的推奨区間生成情報に基づいて車線変更推奨区間情報を生成し、生成した車線変更推奨区間情報を生成情報記憶部118に書き込んで保存する(ステップS102)。車線変更推奨区間情報は、一例としては目的地までの走行経路のうち、分岐点から所定距離手前の地点までの区間であって渋滞発生頻度が所定の頻度以上の区間などであってよい。車線変更推奨区間情報は、車線変更が必要な車線変更区間において車線変更を推奨する推奨区間と、車線変更区間における車両1の推奨走行車線とを含む。その後、車線変更推奨区間通知部113は、車線変更推奨区間情報が示す推奨区間を運転者に通知する(ステップS103)。例えば車線変更推奨区間通知部113は、表示装置15に表示した地図上に走行経路を表示し、表示した走行経路上に推奨区間を強調表示する等により推奨区間を通知する。或いは車線変更推奨区間通知部113は、推奨区間の住所や地点名等を表示装置15に表示してもよいし、音声出力装置16から音声出力してもよい。その後処理を終了する。
Next, the lane change recommended
図11は車載器の処理フローを示す第二の図である。
続いて、車線変更推奨区間情報を生成する処理を詳細に説明する。本図は上述したステップS102に示す処理に対応する。
まず車線変更推奨区間生成部112が位置センサ14から現在位置を取得する。そして車線変更推奨区間生成部112は、地図情報に基づいて現在位置から目的地までの走行経路を生成する(ステップS1021)。続いて車線変更推奨区間生成部112が、当該走行経路において車線変更が必要な区間(以下「車線変更区間」とする。)を抽出する(ステップS1022)。例えば車線変更推奨区間生成部112は、走行経路において、分岐地点に到達する直前の走行区間のうち複数車線ある区間を車線変更区間とする。
FIG. 11 is a second diagram showing the process flow of the vehicle-mounted unit.
Next, a process for generating the recommended lane change section information will be described in detail. This process corresponds to the process shown in step S102 described above.
First, the lane-change recommended
続いて車線変更推奨区間生成部112は、運転者情報及び隊列情報に基づいて車線変更閾値を算出する(ステップS1023)。車線変更閾値は、運転者が当該隊列を車線変更する難易度を示す指標である。例えば運転者の大型車運転歴や隊列先導経験や過去の隊列走行時の車線変更回数が大きいほど車線変更閾値は小さい。また隊列の長さや車両数や走行時の混雑状況、速度状況などの各道路状況での車間距離や車線変更に必要な時間の予想値が大きいほど車線変更閾値は大きい。車線変更推奨区間生成部112は、車線変更閾値の算出式にこれら大型車運転歴を示す年数、隊列先導経験を示す年数、隊列の長さや車両数、車間距離や車線変更に必要な時間の予想値などを入力して、出力値である車線変更閾値を算出してよい。
Next, the lane change recommended
続いて車線変更推奨区間生成部112は、過去の車線変更情報及び地図情報に基づいて、当該車線変更区間における各地点の車線変更推奨度を算出する(ステップS1024)。車線変更推奨度は、車線変更の推奨度合いを示す指標である。例えば過去の車線変更情報に当該車線変更区間における車線変更情報がある場合には、車線変更にかかった時間が短い地点ほど車線変更推奨度が大きい。また道路が直線であれば車線変更推奨度が大きく、カーブ等の曲線であれば車線変更推奨度が低い。車線変更推奨区間生成部112は、複数の算出対象地点について、過去の他の車両が車線変更にかかった時間を静的推奨区間生成情報の中から取得し、その時間を車線変更推奨度の算出式に入力して車線変更推奨度を算出する。
Then, the lane change recommendation
そして車線変更推奨区間生成部112は、車線変更閾値以上の車線変更推奨度を持つ地点のうち、渋滞や事故や混雑が発生しておらず渋滞発生頻度が低い地点がある区間を推奨区間とする(ステップS1025)。渋滞発生頻度が低い地点は、過去の所定期間において渋滞発生頻度が所定の閾値以下の地点であってよい。渋滞発生頻度は一例としては、静的推奨区間生成情報に含まれる過去の当該所定期間における渋滞発生回数であってよい。車線変更推奨区間生成部112は、渋滞発生頻度の所定閾値以下の地点が、車線変更推奨区間の中に無い場合には、その車線変更推奨区間の始点から終点までの距離より短い、始点から所定の定められた短い距離を推奨区間としてもよい。また車線変更推奨区間生成部112は、分岐地点において分岐する方向にある車線を推奨区間における推奨走行車線とする。その後、処理を終了する。なお分岐地点において分岐する方向にある車線とは、分岐を通過する車線のうち所望の分岐方向に進行するために走行すべき車線である。
Then, the lane change recommended
図12は車線変更の推奨区間を生成する処理を説明するための図である。
具体例を用いて詳細に説明する。走行経路において進行方向に分岐地点Bがあり、分岐地点Bにおいて左方向に分岐する場合を例に説明する。分岐地点Bに到達する直前の走行区間CSが複数車線である場合には、分岐地点Bに到達する前に左側の車線を走行していなければ分岐地点Bで左方向に分岐することが困難になる。そのため車線変更推奨区間生成部112は、当該走行区間CSを車線変更区間とする。ここで車線変更区間CSには地点P1~地点P5があり、そのうち地点P1~地点P3では渋滞が発生しているか、または渋滞の発生頻度が高い。このような場合、車線変更推奨区間生成部112は、車線変更区間CSにある地点P1~地点P5のうち車線変更閾値以上の車線変更推奨度を示し、かつ渋滞が発生しておらず渋滞発生頻度が小さい地点P4及び地点P5がある区間RSを推奨区間とする。また車線変更推奨区間生成部112は、左側の車線を推奨走行車線とする。
FIG. 12 is a diagram for explaining the process of generating a recommended lane change section.
A detailed explanation will be given using a specific example. An example will be given in which a branch point B exists in the travel direction on a travel route, and the vehicle branches off to the left at the branch point B. If the travel section CS immediately before the branch point B has multiple lanes, it is difficult to branch off to the left at the branch point B unless the vehicle is traveling in the left lane before the branch point B is reached. Therefore, the lane change recommendation
以上の処理により、車載器10は、隊列走行する車両について車線変更が必要な車線変更区間において車線変更を推奨する推奨区間を運転者に通知することができる。これにより、運転者は、運転対象となる隊列走行車両についてどの区間で車線変更をした方がよいのかを知ることができる。
By performing the above process, the vehicle-mounted
また車線変更推奨区間生成部112が地図情報、渋滞発生頻度、過去の車線変更情報、隊列情報、及び運転者情報を含む静的推奨区間生成情報に基づいて車線変更推奨区間情報を生成しているため、車両1の運転者が当該隊列を車線変更するのに適した区間を推奨区間とすることができる。また車線変更推奨区間生成部112が現在位置、進行方向の渋滞状況、進行方向の事故情報、及び隊列周囲の混雑情報を含む動的推奨区間生成情報に基づいて推奨区間を生成しているため、例えば渋滞や事故が発生していない区間を推奨区間にする等、道路状況に応じて車線変更推奨区間情報を生成することができる。
In addition, since the lane-change recommended
その後、運転者は手動または自動で運転を行い、後続の車両1は当該隊列における直前に位置する車両1との間隔を維持して走行する。また車載器10は隊列走行中に路側機2を通過する際、路側機2から発信される信号を受信する。車載器10は路側機2から発信される信号の受信に基づいて、路側機2または車両管理装置3と通信接続を行う。
Then, the driver drives manually or automatically, and the following
図13は車載器の処理フローを示す第三の図である。
続いて、車両1の隊列走行時における車載器10の処理を説明する。
まず車線変更推奨区間生成部112は、動的推奨区間生成情報記憶部116が記憶する動的推奨区間生成情報が更新されたか否かを判定する(ステップS201)。車線変更推奨区間生成部112は動的推奨区間生成情報が更新されていない場合(ステップS201;NO)、ステップS201の処理を繰り返す。一方、車線変更推奨区間生成部112は、動的推奨区間生成情報が更新された場合(ステップS201;Yes)、更新された動的推奨区間生成情報に基づいて車線変更推奨区間情報を生成し、生成した車線変更推奨区間情報を生成情報記憶部118に書き込んで保存する(ステップS202)。車線変更推奨区間情報の生成方法は上述したステップS102と同様である。その後、車線変更推奨区間通知部113は、車線変更推奨区間情報が示す推奨区間を運転者に通知する(ステップS203)。その後処理を終了する。
FIG. 13 is a third diagram showing the process flow of the vehicle-mounted unit.
Next, the process of the in-
First, the lane-change recommended
以上の処理により、車載器10は、動的推奨区間生成情報が更新された際に推奨区間を変更して運転者に通知することができる。例えば、車載器10は、推奨区間に渋滞や事故が発生した場合には、渋滞や事故が発生していない他の区間を車線変更の推奨区間に変更することができる。
By the above processing, the vehicle-mounted
図14は車載器の処理フローを示す第四の図である。
続いて、車両1が車線変更区間内を走行しているときの車載器10の処理を説明する。
まず車線変更通知部114は、車線変更が必要な車線に車両1により構成される隊列がいるか否かを判定する(ステップS301)。例えば車線変更通知部114は、地図情報に含まれる車線地図情報やラインマーカ情報を静的推奨区間生成情報記憶部115から読み出す。車線地図情報は、例えば、標識など道路の設置物の位置、道路中心線の位置、位置に応じた、車線数やカーブの曲率といった道路の設計に基づく情報を含む。ラインマーカ情報は、例えば、道路に所定間隔で埋め込まれた多数のマーカの各IDや位置情報を保持する情報である。そして車線変更通知部114は、車線地図情報やラインマーカ情報を用いて、隊列が走行している走行車線を検知する。或いは車線変更通知部114は、カメラ13が撮影する画像に基づいて走行車線を検知してもよい。そして車線変更通知部114は、車両1の現在位置が車線変更の推奨区間RS内に位置し、検知した現在走行する走行車線が推奨走行車線と一致する場合に車線変更が必要な車線にいないと判定し、そうでない場合に車線変更が必要な車線にいると判定する。
FIG. 14 is a fourth diagram showing the processing flow of the vehicle-mounted unit.
Next, the process of the vehicle-mounted
First, the lane
車線変更通知部114は、車線変更が必要な車線にいないと判定した場合(ステップS301;NO)、音声出力または表示により車線変更が不要であることを運転者に通知する(ステップS302)。その後処理を終了する。
If the lane
一方、車線変更通知部114は、車線変更が必要な車線にいると判定した場合(ステップS301;YES)、周囲を走行している車両の速度情報、加速度情報、及び位置情報を検出する(ステップS303)。例えば車線変更通知部114は、測定器18により周囲を走行している車両の速度、加速度及び位置を測定する。或いは車線変更通知部114は、路側機2や車両管理装置3に問い合わせすることにより周囲を走行している車両の速度情報、加速度情報及び位置情報を取得してもよい。
On the other hand, if the lane
その後、車線変更通知部114は、検出した情報(周囲を走行している車両の速度情報、加速度情報、及び位置情報)、運転者情報、隊列情報、及び過去の車線変更情報に基づいて車線変更の難易度を算出する(ステップS304)。例えば周囲を走行している車両の速度や加速度が速いほど難易度は大きい。また周囲を走行している車両の位置が車両1に近いほど難易度は大きい。また運転者の大型車運転歴や隊列先導経験や過去の隊列走行時の車線変更回数が大きいほど難易度は小さい。また隊列の長さや車両数や走行時の混雑状況、速度状況などの各道路状況での車間距離や車線変更に必要な時間の予想値が大きいほど難易度は大きい。また過去の車線変更情報に現在位置における車線変更情報がある場合には、車線変更にかかった時間が長いほど難易度は大きい。
Then, the lane
そして車線変更通知部114は、算出した難易度に基づいて安全な車線変更が可能か否かを判定する(ステップS305)。具体的には車線変更通知部114は、算出した難易度が所定の閾値以下である場合に安全な車線変更が可能であると判定し、算出した難易度が所定の閾値より大きい場合に車線変更が困難であると判定する。
The lane
車線変更通知部114は、安全な車線変更が可能であると判定した場合(ステップS305;YES)、音声出力または表示により安全な車線変更が可能であることを運転者に通知する(ステップS306)。例えば車線変更通知部114は、車線変更が可能なことを示すランプを点灯することにより安全な車線変更が可能であることを運転者に通知してもよい。その後処理を終了する。なお車線変更通知部114は、安全な車線変更が可能であることを運転者に通知する際に、車線変更が容易であることを通知してもよい。またこの時、車線変更通知部114は、車線変更が必要な理由を運転者に通知してもよい。また車線変更通知部114は、この時、車線変更が容易な区間の終点位置と現在位置との距離を算出し、車線変更が容易な区間はあとどのくらいの距離を走行すると終わるのかを示す情報を運転者に通知してもよい。また車線変更通知部114は、この後も車線変更が容易な区間はあるのか/この区間が最終なのかなどの周辺情報を運転者に通知してもよい。通知の態様は、音声、表示装置への表示などであってよい。上記の車線変更が必要な理由は、一例としては現在位置の先に分岐路があることなどの理由であってよい。
When the lane
一方、車線変更通知部114は、安全な車線変更が可能でないと判定した場合(ステップS305;NO)、音声出力または表示により車線変更が困難であることを運転者に通知する(ステップS307)。その後処理を終了する。なお車線変更通知部114は、安全な車線変更が可能でないときに車両1が車線変更しようとした場合には、ブザー音により警報を鳴らしてもよい。
On the other hand, if the lane
以上の処理により、車載器10は、車両1が車線変更区間を走行しているときに安全に車線変更を行うことができる(車線変更が容易である)か否かを運転者に通知することができる。また、車載器10は、車両1の現在位置における車線変更の難易度を算出し、当該難易度に基づいて通知しているため、周囲を走行する車両の状況等に応じて隊列の車線変更を安全に行うことができるか否かを運転者に通知することができる。これにより、隊列走行する車両1の安全な車線変更を支援することができる。よって、隊列走行時の車線変更に際して運転者にかかる負荷を低減することができる。
By the above processing, the vehicle-mounted
図15は車線変更支援装置の最小構成を示す図である。
車線変更支援装置の一態様である車載器10は、少なくとも取得部114-1、検知部114-2、車線変更通知部114の機能を発揮する。
取得部114-1は、走行経路における分岐地点に到達する直前の走行区間における車両の推奨走行車線及び車線変更の推奨区間の情報を少なくとも含む車線変更推奨区間情報を取得する。
検知部114-2は、分岐地点に到達する直前の走行区間を走行しているときに現在の車両の走行車線を検知する。
車線変更通知部114は、車線変更推奨区間情報に含まれる推奨区間において前記現在の車両の走行車線が、車線変更推奨区間情報に含まれる推奨走行車線に一致しない場合に、車線変更が容易であることを通知する通知情報を出力する。
FIG. 15 is a diagram showing a minimum configuration of the lane change assist device.
The vehicle-mounted
The acquisition unit 114-1 acquires recommended lane-change section information including at least information on the recommended driving lane for the vehicle and the recommended lane-change section in a driving section immediately before reaching a branch point on a driving route.
The detection unit 114-2 detects the current lane in which the vehicle is traveling when the vehicle is traveling in a travel section immediately before arriving at a branch point.
The lane
なお、車線変更支援装置が備える各機能は、車載器10が備えていてもよいし、車両管理装置3が備えてしてもよい。例えば車両管理装置3が車線変更推奨区間情報を生成し、生成した車線変更推奨区間情報を車載器10に送信してもよい。この場合には車載器10は車両管理装置3から受信した車線変更推奨区間情報に基づいて推奨区間や車線変更の容易さ(安全に車線変更できるか否か)を運転者に通知する。
The functions of the lane change assistance device may be provided in the vehicle-mounted
上述の各装置は内部に、コンピュータシステムを有している。そして、上述した各処理の過程は、プログラムの形式でコンピュータ読み取り可能な記録媒体に記憶されており、このプログラムをコンピュータが読み出して実行することによって、上記処理が行われる。ここでコンピュータ読み取り可能な記録媒体とは、磁気ディスク、光磁気ディスク、CD-ROM、DVD-ROM、半導体メモリ等をいう。また、このコンピュータプログラムを通信回線によってコンピュータに配信し、この配信を受けたコンピュータが当該プログラムを実行するようにしても良い。 Each of the above-mentioned devices has a computer system inside. The steps of each of the above-mentioned processes are stored in the form of a program on a computer-readable recording medium, and the above processes are performed by the computer reading and executing this program. Here, computer-readable recording medium refers to a magnetic disk, magneto-optical disk, CD-ROM, DVD-ROM, semiconductor memory, etc. Also, this computer program may be distributed to a computer via a communication line, and the computer that receives this distribution may execute the program.
また、上記プログラムは、前述した機能の一部を実現するためのものであっても良い。さらに、前述した機能をコンピュータシステムにすでに記録されているプログラムとの組み合わせで実現できるもの、いわゆる差分ファイル(差分プログラム)であっても良い。 The above program may also be one that realizes part of the functions described above. Furthermore, it may be one that realizes the functions described above in combination with a program that is already recorded in the computer system, a so-called differential file (differential program).
1・・・車両
2・・・路側機
3・・・車両管理装置
10・・・車載器(車線変更支援装置)
11・・・制御装置
12・・・通信装置
13・・・カメラ
14・・・位置センサ
15・・・表示装置
16・・・音声出力装置
17・・・入力装置
18・・・測定器
100・・・車両管理システム
111・・・制御部
112・・・車線変更推奨区間生成部
113・・・車線変更推奨区間通知部
114・・・車線変更通知部
115・・・静的推奨区間生成情報記憶部
116・・・動的推奨区間生成情報記憶部
117・・・動的推奨区間生成情報取得部
118・・・生成情報記憶部
1: vehicle 2: roadside device 3: vehicle management device 10: vehicle-mounted device (lane change assistance device)
11: Control device 12: Communication device 13: Camera 14: Position sensor 15: Display device 16: Audio output device 17: Input device 18: Measuring instrument 100: Vehicle management system 111: Control unit 112: Lane change recommended section generation unit 113: Lane change recommended section notification unit 114: Lane change notification unit 115: Static recommended section generation information storage unit 116: Dynamic recommended section generation information storage unit 117: Dynamic recommended section generation information acquisition unit 118: Generation information storage unit
Claims (7)
前記推奨区間に関する情報に基づいて決定される車線変更推奨情報を前記隊列走行する車両の運転者に通知する車線変更通知部と、
を備える車線変更支援装置。 a lane change recommendation section generation unit that calculates a recommendation section including a point identified based on a lane change threshold that indicates a degree of difficulty for a driver to change lanes of the vehicles traveling in a platoon and a lane change recommendation level that indicates a recommendation level for changing lanes at each point in a lane change section that indicates a section having multiple lanes among a driving section immediately before reaching a branch point in a driving route;
a lane change notification unit that notifies drivers of the vehicles traveling in the platoon of lane change recommendation information that is determined based on information about the recommended section;
A lane change assist device equipped with:
前記隊列走行する車両が前記走行区間を走行しているときに現在の前記隊列走行する車両の走行車線を検知する検知部と、をさらに備え、
前記車線変更通知部は、前記隊列走行する車両の走行車線が、前記車線変更推奨区間情報に含まれる推奨走行車線に一致しない場合に、前記推奨区間に関する情報に基づいて決定される車線変更推奨情報を前記運転者に通知する
請求項1に記載の車線変更支援装置。 an acquisition unit that acquires lane change recommended section information including at least the recommended section;
a detection unit that detects a current traveling lane of the vehicles traveling in the platoon when the vehicles traveling in the platoon are traveling in the traveling section ,
2. The lane change assistance device according to claim 1, wherein, when the driving lane of the vehicles traveling in the formation does not match the recommended driving lane included in the lane change recommended section information, the lane change notification unit notifies the driver of lane change recommendation information determined based on information regarding the recommended section.
請求項1に記載の車線変更支援装置。 2. The lane change assistance device according to claim 1, wherein the lane change notification unit calculates the difficulty level based on at least one of driver information regarding drivers of the vehicles traveling in the platoon , or lane change information regarding lane changes previously performed by the vehicles traveling in the platoon.
運転者が隊列走行する車両の車線変更を行う難易度を示す車線変更閾値と、走行経路において分岐地点に到達する直前の走行区間のうち複数車線ある区間を示す車線変更区間における各地点の車線変更の推奨度合いを示す車線変更推奨度とに基づいて特定した地点を含む推奨区間を算出する車線変更推奨区間生成手段、
前記推奨区間に関する情報に基づいて決定される車線変更推奨情報を前記隊列走行する車両の運転者に通知する車線変更通知手段、
として機能させるプログラム。 The lane change assist device computer,
a lane change recommendation section generation means for calculating a recommendation section including a point identified based on a lane change threshold indicating a degree of difficulty for a driver to change lanes of the vehicles traveling in a platoon and a lane change recommendation level indicating a recommendation level for a lane change at each point in a lane change section indicating a section having multiple lanes among a driving section immediately before reaching a branch point in a driving route;
a lane change notification means for notifying a driver of the vehicles traveling in the platoon of lane change recommendation information determined based on the information about the recommended section;
A program that functions as a
前記推奨区間に関する情報に基づいて決定される車線変更推奨情報を前記隊列走行する車両の運転者に通知する
車線変更支援方法。 Calculate a recommended section including the specified point based on a lane change threshold indicating a degree of difficulty for a driver to change lanes of the vehicles traveling in the platoon and a lane change recommendation level indicating a degree of recommendation for changing lanes at each point in a lane change section indicating a section having multiple lanes among the driving sections immediately before reaching a branch point in the driving route;
and notifying drivers of the vehicles traveling in the platoon of lane change recommendation information determined based on the information about the recommended section.
前記推奨区間に関する情報に基づいて決定される車線変更推奨情報を前記隊列走行する車両の運転者に通知する車線変更通知部と、
を備える車両。 a lane change recommendation section generation unit that calculates a recommendation section including a point identified based on a lane change threshold that indicates a degree of difficulty for a driver to change lanes of the vehicles traveling in a platoon and a lane change recommendation level that indicates a recommendation level for changing lanes at each point in a lane change section that indicates a section having multiple lanes among a driving section immediately before reaching a branch point in a driving route;
a lane change notification unit that notifies drivers of the vehicles traveling in the platoon of lane change recommendation information that is determined based on information about the recommended section;
A vehicle equipped with.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023171603A JP7601172B2 (en) | 2019-03-28 | 2023-10-02 | Lane change assistance device, lane change assistance method, and program |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019063355A JP7363073B2 (en) | 2019-03-28 | 2019-03-28 | Lane change support device, lane change support method, program |
| JP2023171603A JP7601172B2 (en) | 2019-03-28 | 2023-10-02 | Lane change assistance device, lane change assistance method, and program |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019063355A Division JP7363073B2 (en) | 2019-03-28 | 2019-03-28 | Lane change support device, lane change support method, program |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2023166030A JP2023166030A (en) | 2023-11-17 |
| JP7601172B2 true JP7601172B2 (en) | 2024-12-17 |
Family
ID=72716271
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019063355A Active JP7363073B2 (en) | 2019-03-28 | 2019-03-28 | Lane change support device, lane change support method, program |
| JP2023171603A Active JP7601172B2 (en) | 2019-03-28 | 2023-10-02 | Lane change assistance device, lane change assistance method, and program |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019063355A Active JP7363073B2 (en) | 2019-03-28 | 2019-03-28 | Lane change support device, lane change support method, program |
Country Status (1)
| Country | Link |
|---|---|
| JP (2) | JP7363073B2 (en) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7363073B2 (en) * | 2019-03-28 | 2023-10-18 | 日本電気株式会社 | Lane change support device, lane change support method, program |
| JP7722340B2 (en) | 2022-11-24 | 2025-08-13 | トヨタ自動車株式会社 | Vehicle control device, vehicle control method, and vehicle control program |
| CN115966101A (en) * | 2022-12-20 | 2023-04-14 | 上海友道智途科技有限公司 | A queue-changing method for an intelligent heavy-duty truck fleet |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020166318A (en) | 2019-03-28 | 2020-10-08 | 日本電気株式会社 | Lane change support device, lane change support method, and program |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5233655B2 (en) | 2008-12-22 | 2013-07-10 | 日本電気株式会社 | Tracking target vehicle search system, tracking target vehicle search method, and tracking target vehicle search program |
| CN105636849B (en) | 2013-10-11 | 2018-05-18 | 日产自动车株式会社 | Travel controlling system and travel control method |
| JP6226771B2 (en) | 2014-02-21 | 2017-11-08 | 三菱電機株式会社 | Driving support screen generation device, driving support device, and driving support screen generation method |
| JP6432834B2 (en) | 2015-02-09 | 2018-12-05 | アイシン・エィ・ダブリュ株式会社 | Convoy travel management device and convoy travel management program |
| JP6535634B2 (en) | 2016-05-26 | 2019-06-26 | 本田技研工業株式会社 | Route guidance apparatus and route guidance method |
| JP2017096963A (en) | 2016-12-22 | 2017-06-01 | トムトム ベルギー ネムローゼ フエンノートシャップTomTom Belgium N.V. | Navigation method and system |
| JP2019028733A (en) | 2017-07-31 | 2019-02-21 | 日野自動車株式会社 | Convoy travel system |
| JP6664441B2 (en) | 2018-07-23 | 2020-03-13 | 株式会社ゼンリン | Vehicle control system and data structure of map data |
-
2019
- 2019-03-28 JP JP2019063355A patent/JP7363073B2/en active Active
-
2023
- 2023-10-02 JP JP2023171603A patent/JP7601172B2/en active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020166318A (en) | 2019-03-28 | 2020-10-08 | 日本電気株式会社 | Lane change support device, lane change support method, and program |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7363073B2 (en) | 2023-10-18 |
| JP2023166030A (en) | 2023-11-17 |
| JP2020166318A (en) | 2020-10-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7601172B2 (en) | Lane change assistance device, lane change assistance method, and program | |
| JP7166958B2 (en) | server, vehicle support system | |
| CN107539313B (en) | Vehicle communication network and method of use and manufacture thereof | |
| JP6330537B2 (en) | Driving assistance device | |
| US8666646B2 (en) | Vehicle guidance device, vehicle guidance method, and vehicle guidance program | |
| JP5900454B2 (en) | Vehicle lane guidance system and vehicle lane guidance method | |
| JP4984244B2 (en) | Intersection safe driving support device | |
| JP4840193B2 (en) | Information provision judgment device | |
| JP6252670B2 (en) | Attention guidance system, method and program | |
| WO2017010209A1 (en) | Peripheral environment recognition device and computer program product | |
| CN101923788A (en) | Driving Support Devices and Programs | |
| JP7362733B2 (en) | Automated crowdsourcing of road environment information | |
| CN110450790B (en) | Driving assistance apparatus for vehicle, non-transitory computer-readable storage medium, and control method | |
| JPWO2017110002A1 (en) | Prediction device, prediction system, prediction method, and prediction program | |
| JP2008065481A (en) | Vehicle driving support system | |
| JP5281431B2 (en) | Vehicle information transmission system | |
| JP7172626B2 (en) | Driving support device | |
| JP2019053394A (en) | Automatic driving support device and computer program | |
| JP5871946B2 (en) | Center side system, vehicle side system and probe information system | |
| JP2009176216A (en) | Operation support apparatus, operation support method, and operation support program | |
| JP6323052B2 (en) | Attention guidance system, method and program | |
| JP2018101330A (en) | Driving support device, driving support system, and driving support method | |
| JP5720951B2 (en) | Traffic information distribution system, traffic information system, traffic information distribution program, and traffic information distribution method | |
| JP5811898B2 (en) | Traffic information receiving system, traffic information receiving program, traffic information receiving method, and traffic information system | |
| CN112950995B (en) | Parking assistance device, assistance device, corresponding method, vehicle and server |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20231002 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240827 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20241009 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20241105 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20241118 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7601172 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |