JP7601216B2 - 解析方法、解析装置、計測方法、計測装置、露光方法、および露光装置 - Google Patents
解析方法、解析装置、計測方法、計測装置、露光方法、および露光装置 Download PDFInfo
- Publication number
- JP7601216B2 JP7601216B2 JP2023516441A JP2023516441A JP7601216B2 JP 7601216 B2 JP7601216 B2 JP 7601216B2 JP 2023516441 A JP2023516441 A JP 2023516441A JP 2023516441 A JP2023516441 A JP 2023516441A JP 7601216 B2 JP7601216 B2 JP 7601216B2
- Authority
- JP
- Japan
- Prior art keywords
- substrate
- function
- measurement
- measured
- position information
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F9/00—Registration or positioning of originals, masks, frames, photographic sheets or textured or patterned surfaces, e.g. automatically
- G03F9/70—Registration or positioning of originals, masks, frames, photographic sheets or textured or patterned surfaces, e.g. automatically for microlithography
- G03F9/7088—Alignment mark detection, e.g. TTR, TTL, off-axis detection, array detector, video detection
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B21/00—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant
- G01B21/32—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant for measuring the deformation in a solid
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/70691—Handling of masks or workpieces
- G03F7/70783—Handling stress or warp of chucks, masks or workpieces, e.g. to compensate for imaging errors or considerations related to warpage of masks or workpieces due to their own weight
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B21/00—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant
- G01B21/02—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant for measuring length, width, or thickness
- G01B21/04—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant for measuring length, width, or thickness by measuring coordinates of points
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/20—Exposure; Apparatus therefor
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/70216—Mask projection systems
- G03F7/70341—Details of immersion lithography aspects, e.g. exposure media or control of immersion liquid supply
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/70691—Handling of masks or workpieces
- G03F7/707—Chucks, e.g. chucking or un-chucking operations or structural details
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/70691—Handling of masks or workpieces
- G03F7/70716—Stages
- G03F7/70725—Stages control
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/70691—Handling of masks or workpieces
- G03F7/70733—Handling masks and workpieces, e.g. exchange of workpiece or mask, transport of workpiece or mask
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/70691—Handling of masks or workpieces
- G03F7/70775—Position control, e.g. interferometers or encoders for determining the stage position
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/708—Construction of apparatus, e.g. environment aspects, hygiene aspects or materials
- G03F7/7085—Detection arrangement, e.g. detectors of apparatus alignment possibly mounted on wafers, exposure dose, photo-cleaning flux, stray light, thermal load
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F9/00—Registration or positioning of originals, masks, frames, photographic sheets or textured or patterned surfaces, e.g. automatically
- G03F9/70—Registration or positioning of originals, masks, frames, photographic sheets or textured or patterned surfaces, e.g. automatically for microlithography
- G03F9/7003—Alignment type or strategy, e.g. leveling, global alignment
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F9/00—Registration or positioning of originals, masks, frames, photographic sheets or textured or patterned surfaces, e.g. automatically
- G03F9/70—Registration or positioning of originals, masks, frames, photographic sheets or textured or patterned surfaces, e.g. automatically for microlithography
- G03F9/7003—Alignment type or strategy, e.g. leveling, global alignment
- G03F9/7046—Strategy, e.g. mark, sensor or wavelength selection
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Health & Medical Sciences (AREA)
- Environmental & Geological Engineering (AREA)
- Epidemiology (AREA)
- Public Health (AREA)
- Exposure And Positioning Against Photoresist Photosensitive Materials (AREA)
- Exposure Of Semiconductors, Excluding Electron Or Ion Beam Exposure (AREA)
Description
本願は、2021年4月23日に出願された日本国特願2021-073425号に基づき優先権を主張し、その内容をここに援用する。
第2の態様によると、解析方法は、基板上に形成された複数の被計測部の計測された位置情報である計測位置情報を用意すること、第1種ベッセル関数を用いて表された基準関数に比例係数を乗じた少なくとも1つの関数の和である参照関数を前記計測位置情報に対してフィッティングして、少なくとも1つの前記比例係数の適値を算出すること、を備え、前記基準関数は、前記基板の基準位置から前記被計測部までの距離に対する第1種ベッセル関数を用いて表され、前記第1種ベッセル関数は、前記基板周縁に配置された前記被計測部の基準位置情報に対して極値を取る関数である。
第3の態様によると、解析装置は、基板上に形成された複数の被計測部の計測された位置情報である計測位置情報を入力する入力部と、前記位置計測部が計測した前記被計測部の計測位置情報を解析する解析部と、算出した前記比例係数の適値を少なくとも含む解析結果を外部の装置に出力する出力部と、を備え、前記解析部は、上述の解析方法により、少なくとも1つの前記比例係数の適値を算出する。
第4の態様によると、計測方法は、基板上に形成された複数の被計測部の位置を計測して、前記被計測部の計測位置情報を得ること、上述の解析方法により少なくとも1つの前記比例係数の適値を算出すること、を備える。
第5の態様によると、計測装置は、基板上に形成された被計測部の位置を計測する位置計測部と、前記位置計測部が計測した前記被計測部の計測位置情報を解析する解析部と、を備え、前記解析部は、上述の解析方法により、少なくとも1つの前記比例係数の適値を算出する。
第6の態様によると、露光方法は、上述の計測方法により、第1パターンが前記被計測部に対して所定の位置関係で形成されている前記基板上の複数の前記被計測部の位置を計測して、前記被計測部の計測位置情報を取得するとともに、少なくとも1つの前記比例係数の適値を算出すること、取得した前記計測位置情報、および少なくとも1つの前記比例係数の前記適値に基づいて、前記基板上の前記第1パターンの位置を推定すること、推定した前記第1パターンの位置に基づいて、前記基板上に第2パターンを露光すること、を備える。
第7の態様によると、露光装置は、基板上に形成された被計測部の位置を計測する位置計測部と、前記基板上に所望のパターンを露光する露光光学系と、を備え、上述の露光方法を行う。
第8の態様によると、露光装置は、被計測部が形成された基板を載置して移動するステージと、前記基板を搬送し前記ステージに載置する基板搬送装置と、を備えて前記基板上に所望のパターンを露光する露光装置において、上述の計測方法により得られた計測結果に基づいて、前記基板搬送装置の動作を規定する装置定数を定める。
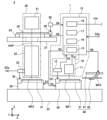
図1は、実施形態の計測装置1および露光装置2の構成を概略的に示す図である。露光装置2は、図1に一点鎖線で囲って示した実施形態の計測装置1を含んでいる。
なお、実施形態の計測装置1は、図1に示したように露光装置2の構成の一部であっても良く、露光装置2とは別の独立した装置であっても良い。以下では、計測装置1は、露光装置2の構成の一部を構成しているものとして説明する。
以下では、各矢印の示す方向を、それぞれ+X方向、+Y方向および+Z方向と呼ぶ。
また、X方向の位置をX位置、Y方向の位置をY位置と呼ぶ。
ただし、露光装置2は、投影光学系22に対して基板WFを載置するステージ30、およびマスク25を載置するマスクステージ24を静止させた状態で露光を行うステップアンドリピート型の露光装置であっても良い。
ステージ30は、基板WFが載置される部分に、基板チャック部31を有している。基板チャック部31は、いわゆる真空チャック、または静電チャックにより基板WFを吸着させる。
変位ベクトルDVのX成分、およびY成分を、それぞれΔX、ΔYとする。j番目(jは任意自然数)の被計測部MPの変位ベクトルDVjは、DVj=(ΔXj、ΔYj)である。
複数の被計測部MPの変位ベクトルDVを、以下では、総称して、または個々に、計測位置情報IMPと呼ぶ。
計測装置1は、基板WF上に形成されている被計測部MPの位置を計測する、点線で囲って示した位置計測部10と、制御部15とを備えている。ここで、後述する位置算出部13は、位置計測部10と制御部15との両方に含まれているものとする。制御部15は、さらに後述する解析部16、表示部17、出力部18を備えている。
制御部15は、解析部16が決定した比例係数の適値、およびその他の解析結果を、表示部17に表示させても良い。
なお、計測装置1または露光装置2は、出力部18および表示部17の少なくとも一方を備えていなくても良い。
第1パターンは、基板WF上の異なる位置に複数形成されていても良く、この場合には、複数のそれぞれの第1パターンに整合させて、基板WF上の異なる位置に第2パターンを複数露光する。
実施形態の解析方法は、基板WF上に形成された複数の被計測部MPの計測された位置情報である計測位置情報IMPに対して、後述する参照関数をフィッティングさせることにより、計測位置情報IMPの特徴を解析するものである。参照関数として、第1種ベッセル関数を用いて表された基準関数に比例係数を乗じた少なくとも1つの関数の和を使用する。
以下、実施形態の解析方法の具体的な例について説明する。
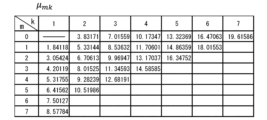
また、μは後述する定数である。
上述した定数μは、式(5)および式(6)においては、第1種ベッセル関数Jmの次数m、および任意の自然数kを添え字として付加した定数μmkとして表している。
なお、m=0においては、k=1の極値、すなわち1番目の極値をとるrの値は0であり、式(5)および式(6)での使用に適していない。そこで、図3Aの数表では、m=0、k=1の欄には横線を引き、この欄の数値は不適であることを示している。
r)を、それぞれ示す。
C31sは、m=3、k=1のJ3(μ31r)×sin(3θ)を表す。基準関数C22cは
、m=2、k=2のJ2(μ22r)×cos(2θ)を表し、基準関数C22sは、m=2、
k=2のJ2(μ22r)×sin(2θ)を表す。
仮想変位ベクトルIVjのX成分Δxj、およびY成分Δyjは、基準関数を用いて以下
の式(7)、式(8)により表される。


α4mkを、総称して、または個々に、単に比例係数αとも呼ぶ。
また、rjは、原点Oからj番目の被計測部MPjまでの距離であり、θjは、原点Oか
らj番目の被計測部MPjまでの偏角である。
以下の式(9)および式(10)により表される。


し、式(9)および式(10)を、式(11)のように1つに纏めて表すこともできる。

最小となるように、比例係数αの適値を設定しても良い。


適当な比例係数αを設定することにより、計測位置情報IMP、すなわち複数の被計測部MPの計測された位置情報である変位ベクトルDV(ΔX,ΔY)に対して、式(7)および式(8)に示した参照関数をフィッティングさせることができる。
の、式(15)のように記述することもできる。

およびβ4mkを総称して、または個々に、単に比例係数βとも呼ぶ。
なお、式(15)において、m=0の場合には、cos(mθ)は常に1となり、sin(mθ)は常に0となる。このため、比例係数β10kと比例係数β30kとは同符号で重複したものとなり、比例係数β20kと比例係数β40kとは逆符号で重複したものとなってしまう。従って、m=0の場合には、比例係数β20kおよび比例係数β30kを、0として扱うと良い。
応する基準関数と、比例係数β2mkに対応する基準関数との、2つの基準関数である。
式(15)との対応を判別し易くするために、これらの基準関数に、対応する比例係数β121または比例係数β221をそれぞれ乗じたものを、それぞれ式(16)、式(17)に示す。


応する基準関数と、比例係数β2mkに対応する基準関数との、2つの基準関数である。
式(15)との対応を判別し易くするために、これらの基準関数に、対応する比例係数β122またはβ222をそれぞれ乗じたものを、それぞれ式(18)、式(18)に示す。


応する基準関数と、添え字がm=1、k=3であって、式(15)の比例係数β1mkに
対応する基準関数との、2つの基準関数である。式(15)との対応を判別し易くするために、これらの基準関数に対応する比例係数β112、または比例係数β113をそれぞれ乗じたものを、それぞれ式(20)、式(21)に示す。


応する基準関数と、比例係数β4mkに対応する基準関数との、2つの基準関数である。
式(15)との対応を判別し易くするために、これらの基準関数に、対応する比例係数β321、および比例係数β421を乗じたものを、それぞれ式(22)、式(23)に示す。


なお、2つの第1種ベッセル関数Jm(μmkr)が直交するとは、2つの第1種ベッセル関数Jm(μmkr)の積を、原点Oを中心とするr≦1の円内で積分した値が0となることをいう。言い換えれば、2つの第1種ベッセル関数Jm(μmkr)の原点Oを中心とするr≦1の円内で積分することによる内積が0となることをいう。



Y位置のずれ量を表す。
j番目の被計測部MPjの計測された変位ベクトルDVj(ΔXj,ΔYj)から、基板WFの並進ずれ、回転、および一様な伸縮に伴う位置ずれ量(εxj,εyj)を除去した位置情報である残留位置情報は、(ΔXj-εxj,ΔYj-εyj)として算出される。
xj,ΔYj-εyj)を用いて解析を行っても良い。
以下、解析方法の変形例について説明する。ただし、解析方法の変形例は、ほとんどの構成が上述した実施形態の解析方法と共通しているため、以下では相違点について説明を行う。実施形態の解析方法においては、基準関数を構成する第1種ベッセル関数は、いずれもr=1において極値を有するものとした。これに対して、変形例の解析方法においては、基準関数を構成する第1種ベッセル関数は、いずれもr=1において0を取る点が異なっている。
変形例の解析方法で使用する基準関数は、例えば、次の式(27)または式(28)により表される関数である。
r)は、r=1において0をとる関数となる。
r)を、それぞれ示す。
m2r)に相当する曲線B12、B22,B32においては、rの増加に伴って(r=0
を除いて)r=1において2回目の0を取る。
以下、実施形態の計測方法について説明する。実施形態の計測方法は、基板WF上に形成された複数の被計測部MPの位置を計測して、被計測部MPの計測位置情報IMP、すなわち複数の被計測部MPの変位ベクトルDVを得る。そして、上述した解析方法により、式(7)および式(8)、または式(15)に示した参照関数に含まれる比例係数α、βの適値を算出するものである。
以下、図7を参照して、実施形態の露光方法について説明する。図7は、その外縁を破線の四角形で示した第1パターンA1が複数形成されている基板WFを示す図である。第1パターンA1の破線で示した外縁の内側には、不図示の微細パターンが複数形成されている。基板WF上には、第1パターンA1に対して所定の位置関係となる位置に、複数の被計測部MPが形成されている。
位置(Arj,Aθj)の値をそれぞれ入力することで、その設計上の位置からのX方向の位置ずれ量Δxj、およびY方向の位置ずれ量Δyjが算出(推定)される。
ターンA1jのXY座標における設計上の位置(AXj,AYj)に上述したΔxjおよびΔyjを加えた、推定位置(AXj+Δxj,AYj+Δyj)である。
そして、推定した第1パターンA1の推定位置に基づいて、基板WF上に、第1パターンA1に位置整合するように不図示の第2パターンを露光する。
てεxjおよびεyjを算出する。そして、このεxjおよびεyjを、上述した第1パターンA1推定位置に加算すればよい。すなわち、補正後の第1パターンA1の推定位置は、推定位置(AXj+Δxj+εxj,AYj+Δyj+εyj)となる。
実施形態の計測装置1および露光装置2についての追加事項を説明する。
制御部15は、比例係数α、βの適値を適用(代入)した参照関数による、計測位置情報IMPのフィッティング結果をベクトル図として表示させても良い。ここでベクトル図とは、図7に示したように、基板WF上の複数の被計測部MPの変形量を、それぞれの被計測部MPの基準位置MDを基準(始点)とするベクトルで表示した図である。このとき、ベクトルを表すスケールは、被計測部MPの位置を表すスケールに比べて、大きく拡大されたものであっても良い。
実施形態の露光装置2についての追加事項を説明する。
実施形態の露光装置2は、上述した実施形態の計測方法により得られた計測結果(比例係数α、β)に基づいて、基板搬送装置40(ロードガイド41、ロードアーム42、基板チャック部31)の動作状態を決定する。基板搬送装置40の動作状態とは、例えば、基板WFをステージ30上の基板チャック部31に載置する際の基板WFの基板チャック部31に対する移動速度、または基板WFと基板チャック部31との相対的な傾斜である。
上述した露光装置2または計測装置2に含まれている解析部15は、露光装置2または計測装置2とは別の解析装置に組み込まれていても良い。
図8は、実施形態の解析装置3の構成を概略的に示す図である。解析装置3は、上述した解析部16、表示部17、出力部18、および位置算出部13に加えて、入力部19を備えている。
なお、露光装置2または計測装置2とは別に構成されている解析装置3においては、上述した位置算出部13または表示部17の少なくとも一方は含まなくても良い。
入力部19と出力部18は入出力部として一体で構成されていても良い。
解析装置3は、解析結果としての適値だけではなく、上述した各種のベクトル図に対応するデータや、その他の処理結果も、併せて出力しても良い。
(1)実施形態または変形例の解析方法は、基板WF上に形成された複数の被計測部MPの計測された位置情報である計測位置情報IMPを用意すること、第1種ベッセル関数を用いて表された基準関数に比例係数を乗じた少なくとも1つの関数の和である参照関数を計測位置情報IMPに対してフィッティングして、少なくとも1つの比例係数の適値を算出すること、を備えている。
この構成により、基板WFの変形を基準関数に対応する変形成分に容易に分離することができ、基準関数に対応する変形モードでの変形量を解析することができる。
(2)実施形態の解析装置3は、基板WF上に形成された複数の被計測部の計測された位置情報である計測位置情報IMPを入力する入力部19と、位置計測部が計測した被計測部MPの計測位置情報IMPを解析する解析部16と、算出した比例係数の適値を少なくとも含む解析結果を外部の装置に出力する出力部18と、を備えている。そして、解析部16は、上述した実施形態または変形例の解析方法により、少なくとも1つの比例係数の適値を算出する。
この構成により、基板WFの変形を基準関数に対応する変形成分に容易に分離することができ、基準関数に対応する変形モードでの変形量を解析することができる。
(3)実施形態の計測方法は、基板WF上に形成された複数の被計測部MPの位置を計測して、被計測部MPの計測位置情報IMPを得ること、実施形態または変形例の解析方法により、第1種ベッセル関数を用いて表された基準関数に比例係数を乗じた少なくとも1つの関数の和である参照関数における、少なくとも1つの比例係数の適値を算出すること、を備えている。
この構成により、基板WFの変形を、基準関数に対応するそれぞれの変形成分毎に計測することができる。
(4)実施形態の計測装置1は、基板WF上に形成された被計測部MPの位置を計測する位置計測部10と、位置計測部10が計測した被計測部MPの計測位置情報IMPを解析する解析部16とを備え、解析部16は、実施形態または変形例の解析方法により、第1種ベッセル関数を用いて表された基準関数に比例係数を乗じた少なくとも1つの関数の和である参照関数における、少なくとも1つの比例係数の適値を算出する。
この構成により、基板WFの変形を、基準関数に対応するそれぞれの変形成分毎に計測することができる。
(5)実施形態の露光方法は、実施形態の計測方法により、基板WF上の複数の前記被計測部MPの位置を計測して、被計測部の計測位置情報IMPを取得するとともに、第1種ベッセル関数を用いて表された基準関数に比例係数を乗じた少なくとも1つの関数の和である参照関数における、少なくとも1つの比例係数の適値を算出する。そして、取得した計測位置情報IMP、および少なくとも1つの比例係数の適値に基づいて、基板WF上に複数の被計測部MPに対して所定の位置関係で形成されている第1パターンA1の位置を推定し、推定した前記第1パターンの位置に基づいて、基板WF上に第2パターンを露光する。
この構成により、変形した基板WFの上に形成されている第1パターンA1に対して、位置を整合させて第2パターンを露光することができる。
(6)実施形態の露光装置2は、1つの観点からは、基板WF上に形成された被計測部MPの位置を計測する位置計測部10と、基板WF上に所望のパターンを露光する露光光学系20と、を備え、実施形態の露光方法を行う。
この構成により、変形した基板WFの上に被計測部MPと所定の位置関係で形成されている第1パターンA1に対して、位置を整合させて第2パターンを露光することができる。
(7)実施形態の露光装置2は、他の1つの観点からは、被計測部MPが形成された基板WFを載置して移動するステージ30と、基板WFを搬送しステージ30に載置する基板搬送装置40とを備えて基板WF上に所望のパターンを露光する露光装置2において、実施形態の計測方法により得られた計測結果に基づいて、基板搬送装置40の動作を規定する装置定数を定める。
この構成により、基板WFの変形を低減させた状態で、基板WFをステージ30に載置することができ、基板WFの上に形成されている第1パターンA1に対して、位置をより整合させて第2パターンを露光することができる。
Claims (22)
- 基板上に形成された複数の被計測部の計測された位置情報である計測位置情報を用意すること、
第1種ベッセル関数を用いて表された基準関数に比例係数を乗じた少なくとも1つの関数の和である参照関数を前記計測位置情報に対してフィッティングして、少なくとも1つの前記比例係数の適値を算出すること、
を備え、
前記基準関数は、前記基板の基準位置から前記被計測部までの距離に対する第1種ベッセル関数と、前記基準位置から前記被計測部への偏角に基づく三角関数との積で表される、解析方法。 - 請求項1に記載の解析方法において、
前記基準関数に含まれる前記第1種ベッセル関数は、前記基板の周縁に配置された前記被計測部の基準位置情報に対して極値を取る関数である、解析方法。 - 基板上に形成された複数の被計測部の計測された位置情報である計測位置情報を用意すること、
第1種ベッセル関数を用いて表された基準関数に比例係数を乗じた少なくとも1つの関数の和である参照関数を前記計測位置情報に対してフィッティングして、少なくとも1つの前記比例係数の適値を算出すること、
を備え、
前記基準関数は、前記基板の基準位置から前記被計測部までの距離に対する第1種ベッセル関数を用いて表され、
前記第1種ベッセル関数は、前記基板の周縁に配置された前記被計測部の基準位置情報に対して極値を取る関数である、解析方法。 - 請求項3に記載の解析方法において、
前記基準関数は、前記第1種ベッセル関数と、前記基準位置から前記被計測部への偏角に基づく三角関数との積を用いて表される、解析方法。 - 請求項2または3に記載の解析方法において、
前記基準関数として、前記基準位置から前記被計測部までの距離rに定数μを乗じた値を引数とするm次の第1種ベッセル関数Jm(μr)(mは自然数)と、前記基準位置から前記被計測部への偏角θのm倍の角度を引数とするcos関数およびcos関数からなる2次
元のベクトルと、の積として、それぞれ以下の2つの式のいずれかにより示される2つの関数を含む、解析方法。


- 請求項5に記載の解析方法において、
前記mは2であり、
前記定数μは、距離rが0から増加する際に前記基板の周縁に対応する距離rにおいて、2次の第1種ベッセル関数J2(μr)が1個目の0でない極値を取るように設定されている、解析方法。 - 請求項5に記載の解析方法において、
前記mは2であり、
前記定数μは、距離rが0から増加する際に前記基板の周縁に対応する距離rにおいて、2次の第1種ベッセル関数J2(μr)が2個目の0でない極値を取るように設定されている、解析方法。 - 請求項2または3に記載の解析方法において、
前記基準関数として、前記基準位置から前記被計測部までの距離rに定数μ1を乗じた値を引数とする1次の第1種ベッセル関数J1(μ1r)、および前記基準位置から前記被計測部までの距離rに定数μ2を乗じた値を引数とする1次の第1種ベッセル関数J1(μ2r)に、前記基準位置から前記被計測部への偏角θを引数とするcos関数およびcos関数からなる2次元のベクトルをそれぞれ乗じた2つの関数であって、それぞれ以下の2つの式のいずれかにより示される2つの関数を含み、
前記定数μ1は、距離rが0から増加する際に前記基板の周縁に対応する距離rにおいて、1次の第1種ベッセル関数J1(μ1r)が2個目の0でない極値を取るように設定され、
前記定数μ2は、距離rが0から増加する際に前記基板の周縁に対応する距離rにおいて、1次の第1種ベッセル関数J1(μ2r)が3個目の0でない極値を取るように設定されている、解析方法。


- 請求項2または3に記載の解析方法において、
前記基準関数として、前記基準位置から前記被計測部までの距離rに定数μを乗じた値を引数とする2次の第1種ベッセル関数J2(μr)と、前記基準位置から前記被計測部への偏角θの2倍の角度を引数とするcos関数およびcos関数からなる2次元のベクトルと、の積として、それぞれ以下の2つの式のいずれかにより示される2つの関数を含み、
前記定数μは、距離rが0から増加する際に前記基板の周縁に対応する距離rにおいて、2次の第1種ベッセル関数J2(μr)が1個目の0でない極値を取るように設定されている、解析方法。


- 請求項2または3に記載の解析方法において、
前記基準関数に含まれる前記第1種ベッセル関数は、前記基板の周縁に配置された前記被計測部の前記基準位置情報に対して0となる関数である、解析方法。 - 請求項1または3に記載の解析方法において、
前記参照関数は、前記基板の面内において相互に直交する2以上の前記第1種ベッセル関数により表される2以上の前記基準関数を含む、解析方法。 - 請求項1または3に記載の解析方法において、
前記計測位置情報として、複数の前記被計測部の計測された位置情報から、前記基板の並進ずれ、回転および一様な伸縮に伴う位置ずれ量を除去した位置情報である残留位置情報を用いる、解析方法。 - 基板上に形成された複数の被計測部の計測された位置情報である計測位置情報を入力する入力部と、
位置計測部が計測した前記被計測部の計測位置情報を解析する解析部と、
算出した前記比例係数の適値を少なくとも含む解析結果を外部の装置に出力する出力部と、を備え、
前記解析部は、請求項1または3に記載の解析方法により、少なくとも1つの前記比例係数の適値を算出する解析装置。 - 基板上に形成された複数の被計測部の位置を計測して、前記被計測部の計測位置情報を得ること、
請求項1に記載の解析方法により、少なくとも1つの前記比例係数の適値を算出すること、
を備える、計測方法。 - 基板上に形成された被計測部の位置を計測する位置計測部と、
前記位置計測部が計測した前記被計測部の計測位置情報を解析する解析部と、を備え、
前記解析部は、請求項1または3に記載の解析方法により、
少なくとも1つの前記比例係数の適値を算出する、計測装置。 - 請求項15に記載の計測装置において、
算出した前記比例係数の適値を少なくとも含む解析結果を当該計測装置とは異なる外部の装置に出力する出力部を備える、計測装置。 - 請求項15に記載の計測装置において、
算出した前記比例係数の適値を少なくとも含む解析結果を表示する表示部を備える、計測装置。 - 請求項17に記載の計測装置において、
前記表示部は、前記比例係数の適値を適用した前記参照関数によるフィッティング結果をベクトル図として表示する、計測装置。 - 請求項14に記載の計測方法により、前記基板上の複数の前記被計測部の位置を計測して、前記被計測部の計測位置情報を取得するとともに、少なくとも1つの前記比例係数の適値を算出すること、
取得した前記計測位置情報、および少なくとも1つの前記比例係数の前記適値に基づいて、前記基板上に複数の前記被計測部に対して所定の位置関係で形成されている第1パターンの位置を推定すること、
推定した前記第1パターンの位置に基づいて、前記基板上に第2パターンを露光すること、
を備える、露光方法。 - 基板上に形成された被計測部の位置を計測する位置計測部と、
前記基板上に所望のパターンを露光する露光光学系と、を備え、
請求項19に記載の露光方法を行う、露光装置。 - 被計測部が形成された基板を載置して移動するステージと、
前記基板を搬送し前記ステージに載置する基板搬送装置と、を備えて前記基板上に所望のパターンを露光する露光装置において、
請求項14に記載の計測方法により得られた計測結果に基づいて、前記基板搬送装置の動作を規定する装置定数を定める、露光装置。 - 請求項21に記載の露光装置において、前記装置定数は、前記基板を前記ステージに載置する際の前記基板の移動速度、前記基板と前記ステージとの相対的な傾斜、または前記基板を前記ステージに保持するための保持力発生のタイミング、のいずれか一つを含む、
露光装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021073425 | 2021-04-23 | ||
| JP2021073425 | 2021-04-23 | ||
| PCT/JP2022/017371 WO2022224845A1 (ja) | 2021-04-23 | 2022-04-08 | 解析方法、解析装置、計測方法、計測装置、露光方法、および露光装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JPWO2022224845A1 JPWO2022224845A1 (ja) | 2022-10-27 |
| JPWO2022224845A5 JPWO2022224845A5 (ja) | 2024-01-26 |
| JP7601216B2 true JP7601216B2 (ja) | 2024-12-17 |
Family
ID=83722956
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023516441A Active JP7601216B2 (ja) | 2021-04-23 | 2022-04-08 | 解析方法、解析装置、計測方法、計測装置、露光方法、および露光装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US12535747B2 (ja) |
| EP (1) | EP4328544A4 (ja) |
| JP (1) | JP7601216B2 (ja) |
| KR (1) | KR20230159525A (ja) |
| TW (1) | TW202246914A (ja) |
| WO (1) | WO2022224845A1 (ja) |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017506741A (ja) | 2014-02-03 | 2017-03-09 | エーエスエムエル ネザーランズ ビー.ブイ. | メトロロジー方法及び装置、基板、リソグラフィシステム並びにデバイス製造方法 |
| JP2017524960A (ja) | 2014-06-12 | 2017-08-31 | エーエスエムエル ネザーランズ ビー.ブイ. | リソグラフィ装置及び露光方法 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0878311A (ja) * | 1994-07-08 | 1996-03-22 | Nikon Corp | 露光方法及び露光装置 |
| US6664121B2 (en) * | 2002-05-20 | 2003-12-16 | Nikon Precision, Inc. | Method and apparatus for position measurement of a pattern formed by a lithographic exposure tool |
| JP5105135B2 (ja) * | 2005-06-28 | 2012-12-19 | 株式会社ニコン | 推定方法、露光方法、デバイス製造方法、検査方法、デバイス製造装置、及びプログラム |
| US9360858B2 (en) * | 2011-08-08 | 2016-06-07 | Globalfoundries Inc. | Alignment data based process control system |
| CN119414655A (zh) | 2016-08-24 | 2025-02-11 | 株式会社 尼康 | 基板处理系统、以及元件制造方法 |
| EP3627228B1 (en) * | 2017-09-28 | 2026-01-14 | ASML Netherlands B.V. | Lithographic method |
| KR102745234B1 (ko) * | 2019-09-03 | 2024-12-23 | 에이에스엠엘 네델란즈 비.브이. | 패턴들의 수차 감도를 결정하는 방법 |
| JP7391897B2 (ja) | 2019-11-06 | 2023-12-05 | 東芝ライフスタイル株式会社 | 冷蔵庫 |
-
2022
- 2022-04-08 EP EP22791619.4A patent/EP4328544A4/en active Pending
- 2022-04-08 KR KR1020237035768A patent/KR20230159525A/ko active Pending
- 2022-04-08 JP JP2023516441A patent/JP7601216B2/ja active Active
- 2022-04-08 WO PCT/JP2022/017371 patent/WO2022224845A1/ja not_active Ceased
- 2022-04-12 TW TW111113847A patent/TW202246914A/zh unknown
-
2023
- 2023-10-20 US US18/382,256 patent/US12535747B2/en active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017506741A (ja) | 2014-02-03 | 2017-03-09 | エーエスエムエル ネザーランズ ビー.ブイ. | メトロロジー方法及び装置、基板、リソグラフィシステム並びにデバイス製造方法 |
| JP2017524960A (ja) | 2014-06-12 | 2017-08-31 | エーエスエムエル ネザーランズ ビー.ブイ. | リソグラフィ装置及び露光方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2022224845A1 (ja) | 2022-10-27 |
| KR20230159525A (ko) | 2023-11-21 |
| US12535747B2 (en) | 2026-01-27 |
| EP4328544A1 (en) | 2024-02-28 |
| TW202246914A (zh) | 2022-12-01 |
| EP4328544A4 (en) | 2025-07-23 |
| WO2022224845A1 (ja) | 2022-10-27 |
| US20240045348A1 (en) | 2024-02-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101022680B1 (ko) | 최적위치 검출식 검출방법, 위치정합방법, 노광방법,디바이스 제조방법 및 디바이스 | |
| JP6543761B2 (ja) | リソグラフィ装置及びデバイス製造方法 | |
| CN102540700B (zh) | 操作图案形成装置的方法和光刻设备 | |
| CN105900016B (zh) | 用于测量衬底上的结构的方法和设备、用于误差校正的模型、用于实施这样的方法和设备的计算机程序产品 | |
| US9715181B2 (en) | Method of calibrating a lithographic apparatus, device manufacturing method and associated data processing apparatus and computer program product | |
| KR102059018B1 (ko) | 패터닝 공정 오차를 보정하는 장치 및 방법 | |
| CN114207527B (zh) | 用于控制半导体制造过程的方法 | |
| JP4710827B2 (ja) | アライメント条件決定方法及び装置、並びに露光方法及び装置 | |
| JP2020505651A (ja) | パターンの位置決め精度を高めるための方法及びシステム | |
| WO2020038642A1 (en) | Metrology apparatus | |
| JP4792285B2 (ja) | モデル・パラメータを使用して自動プロセス補正を行うための方法及びシステム、並びにこのような方法及びシステムを使用したリソグラフィ機器 | |
| JP2013247258A (ja) | アライメント方法、露光方法、及びデバイス製造方法、並びにデバイス製造システム | |
| TWI659271B (zh) | 物件定位系統、控制系統、微影設備、物件定位方法及裝置製造方法 | |
| JP6908693B2 (ja) | 構造の特性を決定する方法、検査装置、及びデバイス、製造方法 | |
| JP7601216B2 (ja) | 解析方法、解析装置、計測方法、計測装置、露光方法、および露光装置 | |
| JP6110504B2 (ja) | リソグラフィ装置、デバイス製造方法、およびコンピュータプログラムプロダクト | |
| JP6854914B2 (ja) | リソグラフィ方法及び装置 | |
| JP6918926B2 (ja) | 装置マークのインシチュプリンティングを含む計測方法及び対応する装置 | |
| CN113994265A (zh) | 用于确定辐射斑的中心的方法、传感器和平台设备 | |
| JP2012079735A (ja) | マスク伸縮補正最適化方法、露光方法及びデバイス製造方法、並びにデバイス製造システム | |
| JP2007096069A (ja) | 位置合わせ方法、重ね合わせ精度計測方法、露光方法、位置合わせ装置、露光装置、及び重ね合わせ精度計測装置 | |
| JP7309516B2 (ja) | 露光装置、物品の製造方法、露光方法、及び記録媒体 | |
| JP7212528B2 (ja) | リソグラフィ装置、計測方法、および物品の製造方法 | |
| JP7775032B2 (ja) | 情報処理装置、リソグラフィ装置、情報処理方法、物品の製造方法、およびプログラム | |
| JP2024122540A (ja) | 情報処理装置およびプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20231020 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20231020 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240611 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20240807 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20241004 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20241105 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20241118 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7601216 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |