JP7610185B2 - 走行支援制御装置 - Google Patents
走行支援制御装置 Download PDFInfo
- Publication number
- JP7610185B2 JP7610185B2 JP2021125548A JP2021125548A JP7610185B2 JP 7610185 B2 JP7610185 B2 JP 7610185B2 JP 2021125548 A JP2021125548 A JP 2021125548A JP 2021125548 A JP2021125548 A JP 2021125548A JP 7610185 B2 JP7610185 B2 JP 7610185B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- image
- registered
- overhead image
- camera device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images











Landscapes
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Description
検討装置は、車両の目標区画への初回の走行時に、前カメラ装置及び後カメラ装置のうち目標区画に最も近い一のカメラが異なるタイミングで取得した画像のそれぞれに基いて複数の登録俯瞰画像を生成する。そして、検討装置は、登録俯瞰画像と「登録俯瞰画像における所定位置の目標区画に対する位置」とを対応付けて記憶しておく。なお、前カメラ装置は車両の前方領域を撮影し、後カメラ装置は車両の後方領域を撮影する。
前方マッチングは、「前カメラ装置が現時点にて撮影した画像に基き生成される前方俯瞰画像」と「上記登録俯瞰画像のうち一の登録俯瞰画像」とのマッチングである。
後方マッチングは、「後カメラ装置が現時点にて撮影した画像に基き生成される後方俯瞰画像」と「上記登録俯瞰画像のうちの一の登録俯瞰画像」とのマッチングである。
・車両は、目標区画へと車両の後方から進入していく。
・目標区画に最も近いカメラは後カメラ装置となるので、上記複数の登録俯瞰画像は後カメラ装置が撮影した画像に基き生成されている。
・目標区画まで車両が走行する路面に上り勾配がある。
車両の前方領域を撮影する前カメラ装置(22)と、
前記車両の後方領域を撮影する後カメラ装置(24)と、
前記車両を前記車両の運転者により予め指定された目標区画(Ptgt)に向かって走行させる制御ユニット(20)と、
を備える。
前記車両の前記目標区画への初回走行時において、異なる複数のタイミングで、前記前カメラ装置及び前記後カメラ装置のうち前記目標区画に近い方の登録用カメラ装置が撮影した画像に基いて生成される俯瞰画像である登録俯瞰画像を取得し(ステップ850)、
前記登録俯瞰画像を、前記登録用カメラ装置を識別可能なカメラ識別子と、前記登録俯瞰画像の取得時点の前記車両の前後方向の勾配の大きさに関する勾配情報と、を対応付けて、登録俯瞰画像情報として記憶し(ステップ865)、
前記車両の前記目標区画への2回目以降の走行時において、
現時点における前記車両の前記目標区画に対する位置である推定位置を推定し(ステップ1020)、
前記登録俯瞰画像情報のうち前記推定位置と最も近い位置で取得された登録俯瞰画像情報である対応登録俯瞰画像情報の前記勾配情報が前記勾配の大きさが所定の閾値以下であり、且つ、現時点の前記勾配の大きさが前記閾値以下である、との無勾配条件が成立した場合(ステップ1055「Yes」)、前記前カメラ装置が現時点にて撮影した画像に基いて生成される俯瞰画像である前方俯瞰画像と前記登録俯瞰画像情報のうち前記前方俯瞰画像の位置に最も近い登録俯瞰画像情報の登録俯瞰画像とのマッチング(ステップ1105乃至ステップ1115)、及び、前記後カメラ装置が現時点にて撮影した画像に基いて生成される俯瞰画像である後方俯瞰画像と前記登録俯瞰画像情報のうち前記後方俯瞰画像の位置に最も近い登録俯瞰画像情報の登録俯瞰画像とのマッチング(ステップ1120乃至ステップ1130)により、前記車両の前記目標区画に対する位置を特定し(ステップ1065)、
前記無勾配条件が成立しない場合(ステップ1055「No」)、前記対応登録俯瞰画像情報の前記カメラ識別子によって識別される前記登録用カメラ装置と同じカメラ装置が現時点にて撮影した画像に基いて生成される俯瞰画像である比較俯瞰画像と前記登録俯瞰画像情報のうち前記比較俯瞰画像の位置に最も近い登録俯瞰画像情報の登録俯瞰画像とのマッチング(ステップ1205乃至ステップ1220)により、前記車両の目標区画に対する位置を特定し(ステップ1065)、
前記特定した前記車両の目標区画に対する位置に基いて、前記車両を前記目標区画へと走行させる(ステップ1035)、
ように構成されている。
前カメラ装置22は、車両VAの前方領域を撮像するよう車両VAの前端部の中央に取り付けられている。後カメラ装置24は、車両VAの後方領域を撮像するように車両VAの後端部の中央に取り付けられている。前カメラ装置22及び後カメラ装置24の撮像範囲の中心軸CA1及びCA2は車両VAの前後方向に延びる。
左カメラ装置26は、車両VAの左側の領域を撮像するように車両VAの左側部に取り付けられている。右カメラ装置28は、車両VAの右側の領域を撮像するように車両VAの右側部に取り付けられている。左カメラ装置26及び右カメラ装置28の撮像範囲の中心軸CA3及びCA4は車両VAの車幅方向に延びる。
各カメラ装置の画角は略180度である。
操舵用モータ54は、ステアリングECU50によって向き及び大きさ等が制御される電力に応じてトルクを発生し、このトルクによって操舵アシストトルクを加えたり、左右の操舵輪を操舵したりする。即ち、ステアリングECU50は、操舵用モータ54を用いて舵角θを制御できる。
以下、制御ECU20が実行する走行支援制御を説明する。
走行支援制御は、運転者によって指定(登録)された目標区画Ptgtへと車両VAを自動で走行させる制御である。走行支援制御には、第1制御と第2制御とがある。制御ECU20は、車両VAの目標区画Ptgtへの初回走行時には後述する第1制御を走行支援制御として実行し、車両VAの目標区画Ptgtへの2回目以降の走行時には後述する第2制御を走行支援制御として実行する。
制御ECU20は、目標区画Ptgtの登録時に前カメラ装置22、後カメラ装置24、左カメラ装置26及び右カメラ装置28が撮影した画像に基いて全体俯瞰画像(入口俯瞰画像Pe)を生成する。そして、制御ECU20は、その全体俯瞰画像と車両VAの目標区画Ptgtに対する位置を入口情報として記憶しておく。俯瞰画像は、車両VAの周囲の風景を車両VAの鉛直上方に位置する仮想的な視点から見たときの画像である。
更に、制御ECU20は、以下の前方マッチング及び後方マッチングを行うことにより車両VAの目標区画Ptgtに対するより詳細な位置を特定し、その詳細な位置に基いて車両VAを目標区画Ptgtへと走行させる。
前方マッチング:「前カメラ装置22が撮影した画像に基いて生成された前方俯瞰画像Pfr」と「その前方俯瞰画像Pfrに対応する登録俯瞰画像Pr」とのマッチング
後方マッチング:「後カメラ装置24が撮影した画像に基いて生成された後方俯瞰画像Prr」と「その後方俯瞰画像Prrに対応する登録俯瞰画像Pr」とのマッチング
制御ECU20は、第2制御において前方マッチングを行う場合、図4の下方に示した前方俯瞰画像Pfrと図4の上方に登録俯瞰画像Prとをマッチングする。この前方俯瞰画像Pfrは下り勾配の風景の画像に基いて生成された画像であり、登録俯瞰画像Prは上り勾配の風景の画像に基いて生成された画像である。このような勾配の方向が異なる俯瞰画像では「ずれ」が生じる。この「ずれ」の一例を示すと、前方俯瞰画像Pfrの壁KBの所定位置から白線WLまでの長さは、登録俯瞰画像Prの当該長さよりも長くなってしまっている(図4では、太い矢印で図示している。)。
<第1制御>
図5を参照しながら第1制御の作動例を説明する。
制御ECU20は、車両VAの運転者が目標区画Ptgtを登録するための操作を行った場合、登録画面620をタッチパネル62に表示する。登録画面620においては、俯瞰画像領域622及び登録完了ボタン624が表示される。
制御ECU20は、全体俯瞰画像及び入口情報に基いて車両VAの目標区画Ptgtに対する位置を特定する。より詳細には、制御ECU20は、全体俯瞰画像から画像特徴を抽出し、「抽出した画像特徴のうち入口情報の画像特徴と一致する画像特徴の全体俯瞰画像内における位置」と「入口情報の車両座標(Xv、Yv)」とに基いて現時点の車両座標(Xv、Yv)を特定する。以下、このような位置特定を「全体画像位置特定」と称呼する。
取得条件2:Lt=L2th(L2th<L1th)
取得条件3:Lt=L3th(L3th)
Lt:目標区画Ptgtまでの距離
L1th:第1閾値距離
L2th:第1閾値距離L1thよりも小さな値に設定された第2閾値距離
L3th:第2閾値距離Lt2thよりも小さな値に設定された第3閾値距離
カメラIDは、登録用カメラ装置を識別可能な識別子であり、「カメラ識別子」と称呼する場合もある。
勾配Grは、登録俯瞰画像を生成したときの勾配Grであり、勾配センサ29からの信号に基いて勾配Grを特定される。
画像座標(Xp、Yp)は、登録俯瞰画像Pr内における所定位置(例えば、右上の画素)の上記座標系における座標である。
車両座標(Xv、Yv)は、登録俯瞰画像を生成したときの車両VAの所定位置PPの上記座標系における座標である。
なお、登録俯瞰画像情報は、画像座標(Xp、Yp)及び車両座標(Xv、Yv)のうち何れか一方を含んでいればよい。これは、画像座標(Xp、Yp)及び車両座標(Xv、Yv)の一方と「カメラIDによって識別されるカメラ装置の車両VAの配設位置」とに基いて、画像座標(Xp、Yp)及び車両座標(Xv、Yv)の他方が特定可能であるためである。
制御ECU20は、目標区画Ptgtが登録されている場合に車速Vsが閾値車速Vsth以下となったとき、車両VAの周囲に目標区画Ptgtが存在するかを判定する。詳細には、制御ECU20は、所定時間が経過する毎に全体俯瞰画像を生成し、その全体俯瞰画像から画像特徴を抽出する。そして、制御ECU20は、抽出した画像特徴同士の位置関係が入口情報に登録された画像特徴同士の位置関係と一致する場合、目標区画Ptgtが存在すると判定する。
そして、制御ECU20は、現時点の車両座標(Xvp、Yvp)と最短車両座標(Xv、Yv)との間の距離Lcが所定の閾値距離Lcthよりも大きい場合、現時点の車両座標(Xvp、Yvp)に基いて目標舵角θtgt及び目標加減速度Gtgtを取得する。そして、制御ECU20は、操舵指令及び加減速指令を送信する。最短車両座標(Xv、Yv)は、「現時点の車両座標(Xvp、Yvp)からの距離が最も短い登録俯瞰画像情報(以下、「最短登録俯瞰画像情報」と称呼する。)の車両座標(Xv、Yv)」である。
条件1:最短登録俯瞰画像情報の勾配Grの大きさが所定の閾値Grth未満であること。
条件2:現時点の勾配Grの大きさが閾値Grth未満であること。
制御ECU20は、全体画像位置特定により特定された車両座標(Xvp、Yvp)に基き前方俯瞰画像Pfrの所定位置の画像座標(Xpp、Ypp)を特定し、登録俯瞰画像情報においてその画像座標(Xpp、Ypp)に最も近い画像座標(Xp、Yp)に対応付けられた登録俯瞰画像Prを取得する。そして、制御ECU20は、前方俯瞰画像Pfrと登録俯瞰画像Prとの位置ずれ量を取得する。
上記位置ずれ量は、前方俯瞰画像Pfr及び登録俯瞰画像Prを周知の位相限定相関関数に適用することにより取得される。位相限定相関関数は、そのピーク値の座標が二つの位置ずれ量を示す関数であり、例えば、特開2016-005098号公報及び特開2021-48913号公報等に記載されている。
同様にして、制御ECU20は、後方俯瞰画像Prrの画像座標(Xpp、Ypp)に最も近い登録俯瞰画像Prを取得し、後方俯瞰画像Prrと登録俯瞰画像Prとの位置ずれ量を取得する。
<第1制御開始ルーチン>
制御ECU20のCPU(以下、「CPU」と表記した場合、特に断りがない限り、制御ECU20のCPUを指す。)は、図7にフローチャートにより示した第1制御開始ルーチンを所定時間が経過する毎に実行する。
なお、第1制御フラグX1exe及び第2制御フラグX2exeの値は、イニシャルルーチンにて、「0」に設定される。イニシャルルーチンは、車両VAの図示しないイグニッション・キー・スイッチがオフ位置からオン位置へと変更されたときにCPUによって実行される。
ステップ720:CPUは、前カメラ装置22、後カメラ装置24、左カメラ装置26及び右カメラ装置28から画像を取得し、これらの画像に基いて入口俯瞰画像Peを生成する。
ステップ725:CPUは、入口俯瞰画像Peから画像特徴を抽出する。
ステップ730:CPUは、ステレオ写真測量を用いて「画像特徴の上記座標系における座標である特徴座標(Xf、Yf)」を特定する。
ステップ735:CPUは、ステレオ写真測量を用いて車両座標(Xvp,Yvp)を特定する。
ステップ740:CPUは、入口俯瞰画像Pe、車両座標(Xvp,Yvp)、画像特徴及び特徴座標(Xf、Yf)をそれぞれ対応付けた入口情報を記憶する。
ステップ745:CPUは、車両座標(Xvp、Yvp)に基いて目標経路Rtgtを取得する。
ステップ750;CPUは、車両座標(Xvp、Yvp)に基いて目標舵角θtgt及び目標加減速度Gtgtを取得し、操舵指令及び加減速指令を送信する。
CPUは、図8にフローチャートにより示した第1制御ルーチンを所定時間が経過する毎に実行する。
ステップ815:CPUは、全体俯瞰画像から画像特徴を抽出する。
ステップ820:CPUは、全体画像位置特定により現時点の車両座標(Xvp、Yvp)を特定する。
ステップ825:CPUは、車両座標(Xvp、Yvp)に基いて目標舵角θtgt及び目標加減速度Gtgtを取得し、操舵指令及び加減速指令を送信する。
ステップ830:CPUは、車両座標(Xvp、Yvp)に基いて上記距離Ltを取得し、上記取得条件が成立したか否かを判定する。
ステップ850:CPUは、登録用カメラ装置からの画像に基いて登録俯瞰画像Prを生成する。
ステップ855:CPUは、登録俯瞰画像Pr内の所定位置の上記座標系における座標を画像座標(Xp、Yp)として特定する。
ステップ860:CPUは、勾配センサ29からの信号に基いて勾配Grを取得する。
ステップ865:CPUは、登録俯瞰画像Pr、登録カメラ装置のカメラID、勾配Gr、画像座標(Xp、Yp)及び車両座標(Xvp、Yvp)を登録俯瞰画像情報として記憶する。
CPUは、図9にフローチャートにより示した第2制御開始ルーチンを所定時間が経過する毎に実行する。
ステップ920:CPUは、全体俯瞰画像を生成する。
ステップ925:CPUは、全体俯瞰画像から画像特徴を抽出する。
ステップ930:CPUは、ステレオ写真測量により現時点の車両座標(Xvp、Yvp)を特定する。
ステップ935:CPUは、車両座標(Xvp、Yvp)に基いて目標経路Rtgtを取得する。
ステップ940:CPUは、目標舵角θtgt及び目標加減速度Gtgtを取得し、操舵指令及び加減速指令を送信する。
CPUは、図10にフローチャートにより示した第2制御ルーチンを所定時間が経過する毎に実行する。
ステップ1015:CPUは、全体俯瞰画像から画像特徴を抽出する。
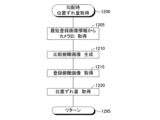
ステップ1020:CPUは、全体画像位置特定により現時点の車両座標(Xvp、Yvp)を特定(推定)する。
ステップ1025:CPUは、登録俯瞰画像情報から最短登録俯瞰画像情報を特定する。
ステップ1030:CPUは、車両座標(Xvp、Yvp)と最短登録俯瞰画像情報の車両座標(Xv、Yv)との距離Lが閾値距離Lth以下であるか否かを判定する。
ステップ1035:CPUは、車両座標(Xvp、Yvp)に基いて目標舵角θtgt及び目標加減速度Gtgtを取得し、操舵指令及び加減速指令を送信する。
ステップ1040:CPUは、車両VAが目標区画Ptgtに到達したか否かを判定する。
ステップ1055:CPUは、最短登録俯瞰画像情報の勾配Gr及び現時点の勾配Grに基き上記無勾配条件が成立するか否かを判定する。
ステップ1060:CPUは、無勾配時位置ずれ量取得サブルーチンを実行する。実際には、CPUは、ステップ1060に進むと、図11にフローチャートにより示したサブルーチンを実行する。このサブルーチンにおける処理は後述する。
ステップ1065:CPUは、ステップ1060又は後述するステップ1070にて取得した位置ずれ量に基いて車両VAの目標区画Ptgtに対する位置を示す車両座標(Xvp、Yvp)を特定する。
その後、CPUは、ステップ1035にて、ステップ1065にて特定された車両座標(Xvp、Yvp)に基いて目標舵角θtgt及び目標加減速度Gtgtを取得し、操舵指令及び加減速指令を送信する。
CPUは、図10に示したステップ1060に進むと、図11に示したステップ1100から処理を開始し、ステップ1105乃至ステップ1135を順に実行する。その後、CPUは、ステップ1195に進んで本ルーチンを一旦終了し、図10に示したステップ1065に進む。
ステップ1110:CPUは、登録俯瞰画像情報から前方俯瞰画像Pfrに最も近い登録俯瞰画像Prを前方登録俯瞰画像として取得する。
ステップ1115:CPUは、前方俯瞰画像Pfr及び前方登録俯瞰画像を位相限定相関関数に適用することにより位置ずれ量を前方位置ずれ量として取得する。
ステップ1120:CPUは、後カメラ装置24からの画像に基き俯瞰画像を後方俯瞰画像Prrとして生成する。
ステップ1125:CPUは、登録俯瞰画像情報から後方俯瞰画像Prrに最も近い登録俯瞰画像Prを後方登録俯瞰画像として取得する。
ステップ1130:CPUは、後方俯瞰画像Prr及び後方登録俯瞰画像を位相限定相関関数に適用することにより位置ずれ量を後方位置ずれ量として取得する。
ステップ1135:CPUは、前方位置ずれ量及び後方位置ずれ量のうち信頼度が高い方の位置ずれ量を選択する。
CPUは、図10に示したステップ1070に進むと、図12に示したステップ1200から処理を開始し、ステップ1205乃至ステップ1220を順に実行する。その後、CPUは、ステップ1295に進んで本ルーチンを一旦終了し、図10に示したステップ1065に進む。
ステップ1210:CPUは、前カメラ装置22及び後カメラ装置24のうち「ステップ1205にて取得したカメラIDによって識別される登録用カメラ装置」からの画像に基いて俯瞰画像を比較俯瞰画像として生成する。
ステップ1215:CPUは、登録俯瞰画像情報から比較俯瞰に最も近い登録俯瞰画像Prを取得する。
ステップ1220:CPUは、比較俯瞰画像及び登録俯瞰画像Prを位相限定相関関数に適用することにより位置ずれ量を位置ずれ量として取得する。
なお、本支援装置10は、ハイブリッド車両及び電気自動車にも適用可能である。
Claims (1)
- 車両の前方領域を撮影する前カメラ装置と、
前記車両の後方領域を撮影する後カメラ装置と、
前記車両を前記車両の運転者により予め指定された目標区画に向かって走行させる制御ユニットと、
を備え、
前記制御ユニットは、
前記車両の前記目標区画への初回走行時において、異なる複数のタイミングで、前記前カメラ装置及び前記後カメラ装置のうち前記目標区画に近い方の登録用カメラ装置が撮影した画像に基いて生成される俯瞰画像である登録俯瞰画像を取得し、
前記登録俯瞰画像を、前記登録用カメラ装置を識別可能なカメラ識別子と、前記登録俯瞰画像の取得時点の前記車両の前後方向の勾配の大きさに関する勾配情報と、を対応付けて、登録俯瞰画像情報として記憶し、
前記車両の前記目標区画への2回目以降の走行時において、
現時点における前記車両の前記目標区画に対する位置である推定位置を推定し、
前記登録俯瞰画像情報のうち前記推定位置と最も近い位置で取得された登録俯瞰画像情報である対応登録俯瞰画像情報の前記勾配情報が前記勾配の大きさが所定の閾値以下であり、且つ、現時点の前記勾配の大きさが前記閾値以下である、との無勾配条件が成立した場合、前記前カメラ装置が現時点にて撮影した画像に基いて生成される俯瞰画像である前方俯瞰画像と前記登録俯瞰画像情報のうち前記前方俯瞰画像の位置に最も近い登録俯瞰画像情報の登録俯瞰画像とのマッチング、及び、前記後カメラ装置が現時点にて撮影した画像に基いて生成される俯瞰画像である後方俯瞰画像と前記登録俯瞰画像情報のうち前記後方俯瞰画像の位置に最も近い登録俯瞰画像情報の登録俯瞰画像とのマッチングにより、前記車両の前記目標区画に対する位置を特定し、
前記無勾配条件が成立しない場合、前記対応登録俯瞰画像情報の前記カメラ識別子によって識別される前記登録用カメラ装置と同じカメラ装置が現時点にて撮影した画像に基いて生成される俯瞰画像である比較俯瞰画像と前記登録俯瞰画像情報のうち前記比較俯瞰画像の位置に最も近い登録俯瞰画像情報の登録俯瞰画像とのマッチングにより、前記車両の目標区画に対する位置を特定し、
前記特定した前記車両の目標区画に対する位置に基いて、前記車両を前記目標区画へと走行させる、
ように構成された、
走行支援制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021125548A JP7610185B2 (ja) | 2021-07-30 | 2021-07-30 | 走行支援制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021125548A JP7610185B2 (ja) | 2021-07-30 | 2021-07-30 | 走行支援制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2023020278A JP2023020278A (ja) | 2023-02-09 |
| JP7610185B2 true JP7610185B2 (ja) | 2025-01-08 |
Family
ID=85159950
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021125548A Active JP7610185B2 (ja) | 2021-07-30 | 2021-07-30 | 走行支援制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7610185B2 (ja) |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008291791A (ja) | 2007-05-25 | 2008-12-04 | Toyota Motor Corp | 駐車支援装置 |
| JP2021062684A (ja) | 2019-10-11 | 2021-04-22 | トヨタ自動車株式会社 | 駐車支援装置 |
-
2021
- 2021-07-30 JP JP2021125548A patent/JP7610185B2/ja active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008291791A (ja) | 2007-05-25 | 2008-12-04 | Toyota Motor Corp | 駐車支援装置 |
| JP2021062684A (ja) | 2019-10-11 | 2021-04-22 | トヨタ自動車株式会社 | 駐車支援装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2023020278A (ja) | 2023-02-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110450717B (zh) | 驻车辅助装置 | |
| EP3290301B1 (en) | Parking assist device | |
| US12589804B2 (en) | Vehicle parking assist apparatus | |
| CN106660556B (zh) | 驾驶辅助装置 | |
| EP2910423B1 (en) | Surroundings monitoring apparatus and program thereof | |
| WO2019093176A1 (ja) | 周辺監視装置 | |
| JP2021054267A (ja) | 駐車支援装置 | |
| CN112644471B (zh) | 车辆停车辅助装置 | |
| CN107614345A (zh) | 车辆用泊车辅助装置 | |
| CN115723754B (zh) | 驾驶辅助装置、车辆、行驶控制方法及程序 | |
| WO2019053922A1 (ja) | 画像処理装置 | |
| CN112721912B (zh) | 驻车辅助装置 | |
| JP7594242B2 (ja) | 車両制御装置 | |
| CN110546047A (zh) | 停车辅助装置 | |
| JP2019156308A (ja) | 駐車支援装置 | |
| JP7610185B2 (ja) | 走行支援制御装置 | |
| JP7674701B2 (ja) | 走行支援装置 | |
| CN112644460A (zh) | 车辆驻车辅助装置 | |
| JP7569010B2 (ja) | 車両用画像処理システム、車両及び画像送信方法 | |
| CN112644476B (zh) | 车辆驻车辅助装置 | |
| JP7183800B2 (ja) | 運転支援装置 | |
| JP7383973B2 (ja) | 駐車支援装置 | |
| JP2023023873A (ja) | 車両周辺監視装置 | |
| JP2026014796A (ja) | 車両用表示制御装置 | |
| CN116265306A (zh) | 驾驶辅助装置、驾驶辅助方法以及程序 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240212 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20241120 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20241120 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20241203 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7610185 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |