JP7611468B2 - モータ駆動装置 - Google Patents
モータ駆動装置 Download PDFInfo
- Publication number
- JP7611468B2 JP7611468B2 JP2022516871A JP2022516871A JP7611468B2 JP 7611468 B2 JP7611468 B2 JP 7611468B2 JP 2022516871 A JP2022516871 A JP 2022516871A JP 2022516871 A JP2022516871 A JP 2022516871A JP 7611468 B2 JP7611468 B2 JP 7611468B2
- Authority
- JP
- Japan
- Prior art keywords
- motor
- command
- state
- controller
- switching unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H23/00—Registering, tensioning, smoothing or guiding webs
- B65H23/02—Registering, tensioning, smoothing or guiding webs transversely
- B65H23/0204—Sensing transverse register of web
- B65H23/0216—Sensing transverse register of web with an element utilising photoelectric effect
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H23/00—Registering, tensioning, smoothing or guiding webs
- B65H23/02—Registering, tensioning, smoothing or guiding webs transversely
- B65H23/032—Controlling transverse register of web
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H23/00—Registering, tensioning, smoothing or guiding webs
- B65H23/04—Registering, tensioning, smoothing or guiding webs longitudinally
- B65H23/18—Registering, tensioning, smoothing or guiding webs longitudinally by controlling or regulating the web-advancing mechanism, e.g. mechanism acting on the running web
- B65H23/182—Registering, tensioning, smoothing or guiding webs longitudinally by controlling or regulating the web-advancing mechanism, e.g. mechanism acting on the running web in unwinding mechanisms or in connection with unwinding operations
- B65H23/185—Registering, tensioning, smoothing or guiding webs longitudinally by controlling or regulating the web-advancing mechanism, e.g. mechanism acting on the running web in unwinding mechanisms or in connection with unwinding operations motor-controlled
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P23/00—Arrangements or methods for the control of AC motors characterised by a control method other than vector control
- H02P23/18—Controlling the angular speed together with angular position or phase
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P5/00—Arrangements specially adapted for regulating or controlling the speed or torque of two or more electric motors
- H02P5/46—Arrangements specially adapted for regulating or controlling the speed or torque of two or more electric motors for speed regulation of two or more dynamo-electric motors in relation to one another
- H02P5/52—Arrangements specially adapted for regulating or controlling the speed or torque of two or more electric motors for speed regulation of two or more dynamo-electric motors in relation to one another additionally providing control of relative angular displacement
- H02P5/56—Speed and position comparison between the motors by electrical means
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/16—Circuit arrangements for detecting position
- H02P6/17—Circuit arrangements for detecting position and for generating speed information
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2511/00—Dimensions; Position; Numbers; Identification; Occurrences
- B65H2511/20—Location in space
- B65H2511/23—Coordinates, e.g. three dimensional coordinates
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2511/00—Dimensions; Position; Numbers; Identification; Occurrences
- B65H2511/50—Occurence
- B65H2511/51—Presence
- B65H2511/514—Particular portion of element
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2513/00—Dynamic entities; Timing aspects
- B65H2513/10—Speed
- B65H2513/11—Speed angular
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2553/00—Sensing or detecting means
- B65H2553/51—Encoders, e.g. linear
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2553/00—Sensing or detecting means
- B65H2553/80—Arangement of the sensing means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2555/00—Actuating means
- B65H2555/20—Actuating means angular
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2557/00—Means for control not provided for in groups B65H2551/00 - B65H2555/00
- B65H2557/20—Calculating means; Controlling methods
- B65H2557/24—Calculating methods; Mathematic models
- B65H2557/242—Calculating methods; Mathematic models involving a particular data profile or curve
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2557/00—Means for control not provided for in groups B65H2551/00 - B65H2555/00
- B65H2557/20—Calculating means; Controlling methods
- B65H2557/264—Calculating means; Controlling methods with key characteristics based on closed loop control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2601/00—Problem to be solved or advantage achieved
- B65H2601/10—Ensuring correct operation
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Control Of Position Or Direction (AREA)
- Control Of Electric Motors In General (AREA)
Description
上述したように、特許文献1に記載された技術によると、センサによるセンシングのタイミングと、モータ駆動装置にフィードバックが伝達されるタイミングとの間に生じるタイムラグに起因して、対象物の位置の制御精度が低下することがある。このため、発明者らは、このタイムラグを抑制することで、対象物の位置の制御精度の低下を抑制することができると考えた。発明者らは、このタイムラグを抑制することができるモータ駆動装置について、鋭意、実験、検討を重ねた。その結果、発明者らは、下記モータ駆動装置に想到した。
<構成>
図1は、実施の形態に係るシート巻き取りシステム1の構成を示す模式図である。
以下、上記構成のモータ駆動装置10が行う動作について説明する。
モータ駆動装置10によると、変位センサ40により検出された対象物60の位置を、コントローラ20を介することなく駆動信号にフィードバックすることができる。これにより、特許文献1に記載された技術において生じる、センサによるセンシングのタイミングと、モータ駆動装置にフィードバックが伝達されるタイミングとの間のタイムラグが抑制される。このため、モータ駆動装置10によると、対象物60の位置の制御精度の低下を抑制することができる。
以上のように、本出願において開示する技術の例示として、実施の形態について説明した。しかしながら、本開示による技術は、これに限定されず、本開示の趣旨を逸脱しない限り、適宜、変更、置き換え、付加、省略等を行った実施の形態又は変形例にも適用可能である。
10 モータ駆動装置
11 位置制御部
12 補正指令出力部
13 切り替え部
14 飽和処理部
20 コントローラ
30 位置補正機構
31 モータ
32 エンコーダ
40 変位センサ
50 巻き取り器
60 対象物(シート)
70 入力装置
Claims (7)
- 対象物の位置を制御するモータを、コントローラからの指令に基づいて駆動するモータ駆動装置であって、
前記対象物の位置を検出する変位センサにより検出された前記対象物の位置に基づいて、前記モータの位置を補正する補正指令を出力する補正指令出力部と、
前記コントローラからの前記指令と、前記モータの位置を検出するエンコーダにより検出された前記モータの位置とに基づいて、又は、前記補正指令と、前記エンコーダにより検出された前記モータの位置とに基づいて、前記モータを駆動するための駆動信号を出力する位置制御部と、
前記コントローラからの前記指令と前記補正指令とを選択的に出力する切り替え部を備え、
前記位置制御部は、前記切り替え部から選択的に出力された前記指令又は前記補正指令と、前記エンコーダにより検出された前記モータの位置とに基づいて、前記駆動信号を出力し、
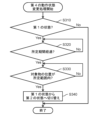
前記切り替え部は、前記コントローラからの前記指令を選択的に出力する第1の状態である場合において、前記第1の状態から、前記補正指令を選択的に出力する第2の状態へと切り替える旨の切り替え信号が入力されたときに、前記切り替え信号が入力されてから所定期間が経過した後に、前記第2の状態へと切り替える、
モータ駆動装置。 - 対象物の位置を制御するモータを、コントローラからの指令に基づいて駆動するモータ駆動装置であって、
前記対象物の位置を検出する変位センサにより検出された前記対象物の位置に基づいて、前記モータの位置を補正する補正指令を出力する補正指令出力部と、
前記コントローラからの前記指令と、前記モータの位置を検出するエンコーダにより検出された前記モータの位置とに基づいて、又は、前記補正指令と、前記エンコーダにより検出された前記モータの位置とに基づいて、前記モータを駆動するための駆動信号を出力する位置制御部と、
前記コントローラからの前記指令と前記補正指令とを選択的に出力する切り替え部を備え、
前記位置制御部は、前記切り替え部から選択的に出力された前記指令又は前記補正指令と、前記エンコーダにより検出された前記モータの位置とに基づいて、前記駆動信号を出力し、
前記切り替え部は、前記コントローラからの前記指令を選択的に出力する第1の状態である場合において、前記第1の状態から、前記補正指令を選択的に出力する第2の状態へと切り替える旨の切り替え信号が入力されたときに、前記変位センサにより検出された前記対象物の位置が所定範囲内でなければ、前記変位センサにより検出された前記対象物の位置が前記所定範囲内になった後に、前記第2の状態へと切り替える、モータ駆動装置。 - 対象物の位置を制御するモータを、コントローラからの指令に基づいて駆動するモータ駆動装置であって、
前記対象物の位置を検出する変位センサにより検出された前記対象物の位置に基づいて、前記モータの位置を補正する補正指令を出力する補正指令出力部と、
前記コントローラからの前記指令と、前記モータの位置を検出するエンコーダにより検出された前記モータの位置とに基づいて、又は、前記補正指令と、前記エンコーダにより検出された前記モータの位置とに基づいて、前記モータを駆動するための駆動信号を出力する位置制御部と、
前記コントローラからの前記指令と前記補正指令とを選択的に出力する切り替え部を備え、
前記位置制御部は、前記切り替え部から選択的に出力された前記指令又は前記補正指令と、前記エンコーダにより検出された前記モータの位置とに基づいて、前記駆動信号を出力し、
前記切り替え部は、前記コントローラからの前記指令を選択的に出力する第1の状態である場合において、前記第1の状態から、前記補正指令を選択的に出力する第2の状態へと切り替える旨の切り替え信号が入力されたときに、前記変位センサにより検出された前記対象物の位置が所定範囲内である状態を所定期間継続すれば、前記第2の状態へと切り替える、
モータ駆動装置。 - 対象物の位置を制御するモータを、コントローラからの指令に基づいて駆動するモータ駆動装置であって、
前記対象物の位置を検出する変位センサにより検出された前記対象物の位置に基づいて、前記モータの位置を補正する補正指令を出力する補正指令出力部と、
前記コントローラからの前記指令と、前記モータの位置を検出するエンコーダにより検出された前記モータの位置とに基づいて、又は、前記補正指令と、前記エンコーダにより検出された前記モータの位置とに基づいて、前記モータを駆動するための駆動信号を出力する位置制御部と、
前記コントローラからの前記指令と前記補正指令とを選択的に出力する切り替え部を備え、
前記位置制御部は、前記切り替え部から選択的に出力された前記指令又は前記補正指令と、前記エンコーダにより検出された前記モータの位置とに基づいて、前記駆動信号を出力し、
前記切り替え部は、前記コントローラからの前記指令を選択的に出力する第1の状態である場合において、前記第1の状態から、前記補正指令を選択的に出力する第2の状態へと切り替える旨の切り替え信号が入力されたときに、前記切り替え信号が入力されてから所定期間が経過した時点で、前記変位センサにより検出された前記対象物の位置が所定範囲内でなければ、前記変位センサにより検出された前記対象物の位置が前記所定範囲内となった後に、前記第2の状態へと切り替える、
モータ駆動装置。 - 対象物の位置を制御するモータを、コントローラからの指令に基づいて駆動するモータ駆動装置であって、
前記対象物の位置を検出する変位センサにより検出された前記対象物の位置に基づいて、前記モータの位置を補正する補正指令を出力する補正指令出力部と、
前記コントローラからの前記指令と、前記モータの位置を検出するエンコーダにより検出された前記モータの位置とに基づいて、又は、前記補正指令と、前記エンコーダにより検出された前記モータの位置とに基づいて、前記モータを駆動するための駆動信号を出力する位置制御部と、
前記コントローラからの前記指令と前記補正指令とを選択的に出力する切り替え部を備え、
前記位置制御部は、前記切り替え部から選択的に出力された前記指令又は前記補正指令と、前記エンコーダにより検出された前記モータの位置とに基づいて、前記駆動信号を出力し、
前記切り替え部は、前記コントローラからの前記指令を選択的に出力する第1の状態である場合において、前記第1の状態から、前記補正指令を選択的に出力する第2の状態へと切り替える旨の切り替え信号が入力されたときに、前記切り替え信号が入力されてから第1の所定期間が経過した後において、前記変位センサにより検出された前記対象物の位置が所定範囲内である状態を第2の所定期間継続すれば、前記第2の状態へと切り替える、
請求項2に記載のモータ駆動装置。 - 更に、前記変位センサにより検出された前記対象物の位置に対して飽和処理を行う飽和処理部を備え、
前記補正指令出力部は、前記飽和処理が行われた位置に基づいて前記補正指令を出力する、
請求項1から請求項5のいずれか1項に記載のモータ駆動装置。 - 前記飽和処理部は、前記切り替え部を、前記コントローラからの前記指令を選択的に出力する第1の状態から、前記補正指令を選択的に出力する第2の状態へと切り替える旨の切り替え信号が入力された場合に、前記飽和処理における飽和値の絶対値を、時間と共に増加させるように変化させる、
請求項6に記載のモータ駆動装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020077803 | 2020-04-24 | ||
| JP2020077803 | 2020-04-24 | ||
| PCT/JP2021/007138 WO2021215111A1 (ja) | 2020-04-24 | 2021-02-25 | モータ駆動装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JPWO2021215111A1 JPWO2021215111A1 (ja) | 2021-10-28 |
| JPWO2021215111A5 JPWO2021215111A5 (ja) | 2023-01-23 |
| JP7611468B2 true JP7611468B2 (ja) | 2025-01-10 |
Family
ID=78270666
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022516871A Active JP7611468B2 (ja) | 2020-04-24 | 2021-02-25 | モータ駆動装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US12132433B2 (ja) |
| EP (1) | EP4142142B1 (ja) |
| JP (1) | JP7611468B2 (ja) |
| KR (1) | KR102820847B1 (ja) |
| CN (1) | CN115461985B (ja) |
| WO (1) | WO2021215111A1 (ja) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2010087224A1 (ja) | 2009-01-28 | 2010-08-05 | 三菱電機株式会社 | バルブ制御装置 |
| JP2010206929A (ja) | 2009-03-03 | 2010-09-16 | Yaskawa Electric Corp | モータ制御装置とその位置制御方法 |
| JP2017163790A (ja) | 2016-03-11 | 2017-09-14 | 株式会社リコー | モータ制御装置、モータ制御システム、画像形成装置および搬送装置 |
| JP2017169258A (ja) | 2016-03-14 | 2017-09-21 | オムロン株式会社 | モータ制御装置、モータ制御方法、制御システム、情報処理プログラム、および記録媒体 |
| JP2018139044A (ja) | 2017-02-24 | 2018-09-06 | ファナック株式会社 | サーボモータ制御装置、サーボモータ制御方法、及びサーボモータ制御用プログラム |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6836386B2 (en) * | 2002-09-12 | 2004-12-28 | International Business Machines Corporation | Calibration of tape drive velocity employing DC motor hall sensor |
| JP2008299710A (ja) * | 2007-06-01 | 2008-12-11 | Hitachi High-Technologies Corp | ステージ位置決め装置 |
| US7684140B2 (en) * | 2008-02-29 | 2010-03-23 | International Business Machines Corporation | Determining angular position of a tape reel using timing based servo format |
| KR101361869B1 (ko) * | 2010-05-20 | 2014-02-12 | 미쓰비시덴키 가부시키가이샤 | 모터 제어 장치 |
| JP5648863B2 (ja) | 2012-03-23 | 2015-01-07 | 株式会社安川電機 | モータ制御装置 |
| WO2016117115A1 (ja) * | 2015-01-23 | 2016-07-28 | 三菱電機株式会社 | 交流回転機の制御装置 |
| JP6510582B2 (ja) * | 2017-04-03 | 2019-05-08 | ミネベアミツミ株式会社 | モータ駆動制御装置、モータ駆動制御方法及びチューブポンプ |
| JP7220353B2 (ja) * | 2017-08-08 | 2023-02-10 | パナソニックIpマネジメント株式会社 | コントローラの情報送信方法及びエンコーダの異常検出方法 |
-
2021
- 2021-02-25 WO PCT/JP2021/007138 patent/WO2021215111A1/ja not_active Ceased
- 2021-02-25 CN CN202180029691.6A patent/CN115461985B/zh active Active
- 2021-02-25 KR KR1020227039501A patent/KR102820847B1/ko active Active
- 2021-02-25 US US17/996,341 patent/US12132433B2/en active Active
- 2021-02-25 JP JP2022516871A patent/JP7611468B2/ja active Active
- 2021-02-25 EP EP21791952.1A patent/EP4142142B1/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2010087224A1 (ja) | 2009-01-28 | 2010-08-05 | 三菱電機株式会社 | バルブ制御装置 |
| JP2010206929A (ja) | 2009-03-03 | 2010-09-16 | Yaskawa Electric Corp | モータ制御装置とその位置制御方法 |
| JP2017163790A (ja) | 2016-03-11 | 2017-09-14 | 株式会社リコー | モータ制御装置、モータ制御システム、画像形成装置および搬送装置 |
| JP2017169258A (ja) | 2016-03-14 | 2017-09-21 | オムロン株式会社 | モータ制御装置、モータ制御方法、制御システム、情報処理プログラム、および記録媒体 |
| JP2018139044A (ja) | 2017-02-24 | 2018-09-06 | ファナック株式会社 | サーボモータ制御装置、サーボモータ制御方法、及びサーボモータ制御用プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| CN115461985A (zh) | 2022-12-09 |
| EP4142142B1 (en) | 2025-11-12 |
| KR102820847B1 (ko) | 2025-06-13 |
| US20230208326A1 (en) | 2023-06-29 |
| JPWO2021215111A1 (ja) | 2021-10-28 |
| US12132433B2 (en) | 2024-10-29 |
| WO2021215111A1 (ja) | 2021-10-28 |
| CN115461985B (zh) | 2025-11-25 |
| EP4142142A1 (en) | 2023-03-01 |
| EP4142142A4 (en) | 2023-09-27 |
| KR20230004600A (ko) | 2023-01-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5689704B2 (ja) | モータ制御装置およびモータ制御方法 | |
| JP4741637B2 (ja) | サーボモータの駆動制御装置及び駆動制御方法 | |
| US6738679B2 (en) | Positional control system and positional control method | |
| JP4729934B2 (ja) | 車両用操舵装置 | |
| JP7611468B2 (ja) | モータ駆動装置 | |
| JP4093191B2 (ja) | モータ制御装置およびプリンタ | |
| JPS6264582A (ja) | 記録装置 | |
| WO2006123839A1 (ja) | 電動パワーステアリング装置の制御装置 | |
| JP4298354B2 (ja) | 位置制御システムおよび位置制御方法 | |
| JP2017013636A (ja) | 自動操舵装置 | |
| JP2004196128A (ja) | 電動パワーステアリング装置 | |
| JP4326881B2 (ja) | 電動パワーステアリング装置の制御装置 | |
| JPWO2021215111A5 (ja) | ||
| JP4876950B2 (ja) | モータの可変速制御装置 | |
| JP2001050830A (ja) | パワーステアリング用トルクセンサ | |
| JP2009067222A (ja) | 電動パワーステアリング装置 | |
| JP7135769B2 (ja) | モーター駆動装置 | |
| JP2004196127A (ja) | 電動パワーステアリング装置 | |
| JP5054644B2 (ja) | 車両用操舵制御装置 | |
| WO1995006537A1 (en) | System for controlling tension of wire | |
| JP3226413B2 (ja) | 数値制御装置 | |
| JP5845434B2 (ja) | モータ駆動装置 | |
| JP7762882B2 (ja) | モータ制御装置、モータ制御方法、および、プログラム | |
| JP2007062526A (ja) | 電動パワーステアリング装置 | |
| JP5223470B2 (ja) | 電動機の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220707 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20221024 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20231206 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20240918 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20241001 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20241106 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20241112 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20241125 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7611468 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |