JP7614384B2 - 芯出し構造、機械、及びロボット - Google Patents
芯出し構造、機械、及びロボット Download PDFInfo
- Publication number
- JP7614384B2 JP7614384B2 JP2023550861A JP2023550861A JP7614384B2 JP 7614384 B2 JP7614384 B2 JP 7614384B2 JP 2023550861 A JP2023550861 A JP 2023550861A JP 2023550861 A JP2023550861 A JP 2023550861A JP 7614384 B2 JP7614384 B2 JP 7614384B2
- Authority
- JP
- Japan
- Prior art keywords
- reducer
- bearing
- link
- shaft
- case
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000003638 chemical reducing agent Substances 0.000 claims description 299
- 230000002093 peripheral effect Effects 0.000 description 8
- 210000000707 wrist Anatomy 0.000 description 5
- 230000000052 comparative effect Effects 0.000 description 4
- 230000006866 deterioration Effects 0.000 description 3
- 238000005516 engineering process Methods 0.000 description 2
- 230000002028 premature Effects 0.000 description 2
- 238000005096 rolling process Methods 0.000 description 2
- 238000010276 construction Methods 0.000 description 1
- 210000000245 forearm Anatomy 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
Images








Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H57/00—General details of gearing
- F16H57/02—Gearboxes; Mounting gearing therein
- F16H57/021—Shaft support structures, e.g. partition walls, bearing eyes, casing walls or covers with bearings
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H57/00—General details of gearing
- F16H57/02—Gearboxes; Mounting gearing therein
- F16H57/023—Mounting or installation of gears or shafts in the gearboxes, e.g. methods or means for assembly
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H57/00—General details of gearing
- F16H2057/0056—Mounting parts arranged in special position or by special sequence, e.g. for keeping particular parts in his position during assembly
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H57/00—General details of gearing
- F16H57/02—Gearboxes; Mounting gearing therein
- F16H2057/02021—Gearboxes; Mounting gearing therein with means for adjusting alignment
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H57/00—General details of gearing
- F16H57/02—Gearboxes; Mounting gearing therein
- F16H2057/02034—Gearboxes combined or connected with electric machines
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H57/00—General details of gearing
- F16H57/02—Gearboxes; Mounting gearing therein
- F16H2057/02039—Gearboxes for particular applications
- F16H2057/02069—Gearboxes for particular applications for industrial applications
- F16H2057/02073—Reduction gearboxes for industry
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Support Of The Bearing (AREA)
- Rolling Contact Bearings (AREA)
Description
本開示の他の態様は、減速機と、前記減速機の中心線より径方向外側に配置される軸受と、前記減速機に固定されるアダプタと、前記減速機及び前記軸受を固定する第一リンクと、を備え、前記アダプタが前記減速機のシャフトと前記軸受の同芯を保ち、前記第一リンクが前記減速機のケースと前記軸受の同芯を保つ、又は前記アダプタが前記減速機のケースと前記軸受の同芯を保ち、前記第一リンクが前記減速機のシャフトと前記軸受の同芯を保つ、芯出し構造を提供する。
本開示の別の態様は、斯かる芯出し構造を備える機械又はロボットを提供する。
本開示の他の態様によれば、減速機と軸受の同芯を保つリンクにより、減速機と軸受の軸中心を整合できる。ひいては、減速機の振動が低減し、減速機の破損を抑制できる。
本開示の別の態様によれば、機械又はロボットが斯かる芯出し構造を備えることにより、機械又はロボットの振動が低減するため、機械又はロボットの破損を抑制できると共に機械又はロボットの位置決め精度を向上できる。
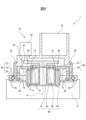
10 アクチュエータ
11~17 リンク
18 手首ユニット
20 電動機
21 回転軸
22 モータ側歯車
30~34 ねじ
40 減速機
41 中央歯車
42 周回歯車
43 シャフト
44 ケース
50 軸受
51 内輪
52 外輪
53 転動体
60 アダプタ
61 内側フランジ
62 筒状部
63 第一外側フランジ
64 第二外側フランジ
70~75 嵌合部
J1~J6 軸線
D1 中央歯車の外径
D2 内側フランジの内径
Claims (10)
- 減速機と、
前記減速機の中心線より径方向外側に配置される軸受と、
前記減速機に固定されていて前記減速機と前記軸受の同芯を保つアダプタと、
前記減速機及び前記軸受を固定する第一リンクと、
前記アダプタを嵌合する第二リンクと、
を備える、芯出し構造。 - 前記アダプタが前記軸受の内輪に内接する又は前記軸受の外輪に外接する、請求項1に記載の芯出し構造。
- 前記アダプタが前記減速機のシャフト又はケースに固定される、請求項1又は2に記載の芯出し構造。
- 前記アダプタが前記減速機に嵌合する、請求項1から3のいずれか一項に記載の芯出し構造。
- 前記第一リンクは前記減速機と前記軸受の同芯を保つ、請求項1から4のいずれか一項に記載の芯出し構造。
- 前記軸受が前記減速機の頂面と底面の間に配置される、請求項1から5のいずれか一項に記載の芯出し構造。
- 減速機と、
前記減速機の中心線より径方向外側に配置される軸受と、
前記減速機に固定されるアダプタと、
前記減速機及び前記軸受を固定する第一リンクと、
を備え、
前記アダプタが前記減速機のシャフトと前記軸受の同芯を保ち、前記第一リンクが前記減速機のケースと前記軸受の同芯を保つ、又は
前記アダプタが前記減速機のケースと前記軸受の同芯を保ち、前記第一リンクが前記減速機のシャフトと前記軸受の同芯を保つ、芯出し構造。 - 減速機と、
前記減速機の中心線より径方向外側に配置される軸受と、
前記減速機と前記軸受を固定する第一リンクと、
前記減速機に固定される第二リンクと、
を備え、
前記第二リンクが前記減速機のシャフトと前記軸受の同芯を保ち、前記第一リンクが前記減速機のケースと前記軸受の同芯を保つ、又は
前記第二リンクが前記減速機のケースと前記軸受の同芯を保ち、前記第一リンクが前記減速機のシャフトと前記軸受の同芯を保つ、芯出し構造。 - 請求項1から8のいずれか一項に記載の芯出し構造を備える機械。
- 請求項1から8のいずれか一項に記載の芯出し構造を備えるロボット。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/035960 WO2023053292A1 (ja) | 2021-09-29 | 2021-09-29 | 芯出し構造、機械、及びロボット |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2023053292A1 JPWO2023053292A1 (ja) | 2023-04-06 |
| JP7614384B2 true JP7614384B2 (ja) | 2025-01-15 |
Family
ID=85780499
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023550861A Active JP7614384B2 (ja) | 2021-09-29 | 2021-09-29 | 芯出し構造、機械、及びロボット |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20250122930A1 (ja) |
| JP (1) | JP7614384B2 (ja) |
| CN (1) | CN117980627A (ja) |
| DE (1) | DE112021007956T5 (ja) |
| TW (1) | TWI912553B (ja) |
| WO (1) | WO2023053292A1 (ja) |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE2327387C3 (de) * | 1973-05-29 | 1978-10-12 | Pfaff Pietzsch Industrieroboter Gmbh, 7505 Ettlingen | Antrieb für Handhabungseinrichtungen |
| JPS5926825B2 (ja) * | 1978-02-22 | 1984-06-30 | 株式会社荏原製作所 | 遊星歯車減速機構 |
| JPS5973299A (ja) * | 1982-10-21 | 1984-04-25 | 株式会社神戸製鋼所 | 工業用ロボツト等の手首機構 |
| DE3312404A1 (de) * | 1983-04-06 | 1984-10-18 | Mantec Gesellschaft für Automatisierungs- und Handhabungssysteme mbH, 8510 Fürth | Robotergelenk |
| US5155423A (en) * | 1986-02-18 | 1992-10-13 | Robotics Research Corporation | Industrial robot with servo |
| US4951518A (en) * | 1990-08-28 | 1990-08-28 | Candy Mfg. Co., Inc. | Zero back lash phase adjusting mechanism |
| JP3401776B2 (ja) * | 1995-11-29 | 2003-04-28 | 株式会社安川電機 | 産業用ロボット |
| JP4758020B2 (ja) | 2001-03-30 | 2011-08-24 | 住友重機械工業株式会社 | 減速装置の遊星部材の軸方向の移動規制構造 |
| JP6633605B2 (ja) * | 2017-12-22 | 2020-01-22 | ファナック株式会社 | ロボット |
| JP6777687B2 (ja) * | 2018-06-12 | 2020-10-28 | ファナック株式会社 | 複数の接続インタフェースを備えるロボットアーム |
-
2021
- 2021-09-29 US US18/693,213 patent/US20250122930A1/en active Pending
- 2021-09-29 JP JP2023550861A patent/JP7614384B2/ja active Active
- 2021-09-29 WO PCT/JP2021/035960 patent/WO2023053292A1/ja not_active Ceased
- 2021-09-29 DE DE112021007956.5T patent/DE112021007956T5/de active Pending
- 2021-09-29 CN CN202180102594.5A patent/CN117980627A/zh active Pending
-
2022
- 2022-08-29 TW TW111132419A patent/TWI912553B/zh active
Also Published As
| Publication number | Publication date |
|---|---|
| DE112021007956T5 (de) | 2024-05-02 |
| TWI912553B (zh) | 2026-01-21 |
| US20250122930A1 (en) | 2025-04-17 |
| WO2023053292A1 (ja) | 2023-04-06 |
| CN117980627A (zh) | 2024-05-03 |
| JPWO2023053292A1 (ja) | 2023-04-06 |
| TW202323695A (zh) | 2023-06-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6708684B2 (ja) | 駆動モータおよび減速機を備えるロボットの関節部の構造 | |
| WO2016084178A1 (ja) | ロボットアーム、ロボットシステム | |
| CN102001095A (zh) | 机器人臂部件及机器人 | |
| JP7614384B2 (ja) | 芯出し構造、機械、及びロボット | |
| US12297893B2 (en) | Speed reducer | |
| WO2012075736A1 (zh) | 蜗杆减速器、机器人关节及机器人 | |
| JP7468827B2 (ja) | 波動歯車装置 | |
| US20230347506A1 (en) | Gear mechanism and robot | |
| CN112709787A (zh) | 减速器的壳体、减速器以及工业用机器人 | |
| JP7677927B2 (ja) | 減速機の製造方法、減速機、及び、回転装置 | |
| JP7472599B2 (ja) | 遊星減速機 | |
| JP4879142B2 (ja) | 減速装置 | |
| JP7444551B2 (ja) | 回転機器の軸受組付け部構造 | |
| JP7416349B2 (ja) | 減速機およびモータ付き減速機 | |
| EP4421337B1 (en) | Bearing, speed reducer, and robot | |
| JP7386116B2 (ja) | 減速装置 | |
| TWI438066B (zh) | 機器人臂部件及機器人 | |
| CN111376309B (zh) | 齿轮机构、齿轮调整方法以及机器人 | |
| JP7725243B2 (ja) | 可撓性外歯歯車、波動歯車装置、およびロボット装置 | |
| JP7364420B2 (ja) | 動力伝達装置 | |
| WO2016084177A1 (ja) | ロボットアーム、ロボットシステム、ギヤユニット、ロボットアームの製造方法 | |
| JP2025116774A (ja) | 歯車部品、内接噛合遊星歯車装置、ロボット用関節装置及び内接噛合遊星歯車装置の製造方法 | |
| JP6713363B2 (ja) | 変速機 | |
| JPS63235754A (ja) | 遊星ロ−ラ式動力伝達装置 | |
| WO2024253052A1 (ja) | 手首関節ユニットおよびそれを備えた作業装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240405 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240806 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240919 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20241203 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20241226 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7614384 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |