JP7614558B2 - 車両運転支援装置 - Google Patents
車両運転支援装置 Download PDFInfo
- Publication number
- JP7614558B2 JP7614558B2 JP2021175407A JP2021175407A JP7614558B2 JP 7614558 B2 JP7614558 B2 JP 7614558B2 JP 2021175407 A JP2021175407 A JP 2021175407A JP 2021175407 A JP2021175407 A JP 2021175407A JP 7614558 B2 JP7614558 B2 JP 7614558B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- host vehicle
- lane departure
- departure prevention
- prevention control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/10—Path keeping
- B60W30/12—Lane keeping
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/06—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/20—Conjoint control of vehicle sub-units of different type or different function including control of steering systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18163—Lane change; Overtaking manoeuvres
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
- B60W60/0025—Planning or execution of driving tasks specially adapted for specific operations
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo, light or radio wave sensitive means, e.g. infrared sensors
- B60W2420/403—Image sensing, e.g. optical camera
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo, light or radio wave sensitive means, e.g. infrared sensors
- B60W2420/408—Radar; Laser, e.g. lidar
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/12—Lateral speed
- B60W2520/125—Lateral acceleration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/14—Yaw
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/10—Accelerator pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/12—Brake pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/18—Steering angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/53—Road markings, e.g. lane marker or crosswalk
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/45—External transmission of data to or from the vehicle
- B60W2556/50—External transmission of data to or from the vehicle of positioning data, e.g. GPS [Global Positioning System] data
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Human Computer Interaction (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Description
そして、前記挙動パラメータは、前記車線逸脱防止制御により前記自車両が横方向に移動される距離である横移動距離である。
更に、本発明に係る車両運転支援装置は、自車両を自律的に操舵して前記自車両が車線から逸脱することを防止する車線逸脱防止制御を実行する制御装置を備えている。前記制御装置は、前記自車両が車線を逸脱する可能性があり且つ前記自車両の運転者による操舵操作に基づいて前記車線逸脱防止制御の実行を禁止する実行禁止条件が成立していない場合、前記車線逸脱防止制御を実行し、前記車線逸脱防止制御の実行中の前記自車両の挙動を表す挙動パラメータが挙動パラメータ上限値を超えないように前記自車両を自律的に操舵するように前記車線逸脱防止制御を実行するように構成されている。更に、前記制御装置は、前記自車両が所定速度以下の速度で走行しているときには、前記自車両が前記所定速度よりも高い速度で走行しているときに比べ、前記挙動パラメータ上限値を小さくし、或いは、前記実行禁止条件が成立しづらくならないように該実行禁止条件を変更するように構成されている。
そして、前記実行禁止条件は、前記実行禁止条件の成立により前記車線逸脱防止制御の実行が禁止されてから経過した時間が所定時間よりも短いとの条件である。そして、前記制御装置は、前記所定時間を長い時間に設定することにより前記実行禁止条件が成立しづらくならないように該実行禁止条件を変更するように構成されている。
車両運転支援装置10は、制御装置としてのECU90を備えている。ECUは、エレクトロニックコントロールユニットの略称である。ECU90は、マイクロコンピュータを主要部として備える。マイクロコンピュータは、CPU、ROM、RAM、不揮発性メモリ及びインターフェース等を含む。CPUは、ROMに格納されたインストラクション又はプログラム又はルーチンを実行することにより、各種機能を実現するようになっている。
又、自車両100には、駆動装置21、制動装置22及び操舵装置23が搭載されている。
駆動装置21は、自車両100を走行させるために自車両100に与えられる駆動力(駆動トルク)を出力する装置であり、例えば、内燃機関及びモータ等である。駆動装置21は、ECU90に電気的に接続されている。ECU90は、駆動装置21の作動を制御して駆動装置21から出力される駆動力を制御することができる。
制動装置22は、自車両100を制動するために自車両100に与えられる制動力(制動トルク)を出力する装置であり、例えば、油圧ブレーキ装置である。制動装置22は、ECU90に電気的に接続されている。ECU90は、制動装置22の作動を制御して制動装置22から出力される制動力を制御することができる。
操舵装置23は、自車両100を操舵するために自車両100に加えられる操舵力(操舵トルク)を出力する装置であり、例えば、パワーステアリング装置である。操舵装置23は、ECU90に電気的に接続されている。ECU90は、操舵装置23の作動を制御して操舵装置23から出力される操舵力を制御することができる。
更に、自車両100には、アクセルペダル31、アクセルペダル操作量センサ32、ブレーキペダル33、ブレーキペダル操作量センサ34、ハンドル35、ステアリングシャフト36、操舵角センサ37、操舵トルクセンサ38、車速検出装置51、横加速度センサ52、ヨーレートセンサ53、周辺情報検出装置60及び道路情報取得装置70が搭載されている。
アクセルペダル操作量センサ32は、アクセルペダル31の操作量を検出するセンサである。アクセルペダル操作量センサ32は、ECU90に電気的に接続されている。アクセルペダル操作量センサ32は、検出したアクセルペダル31の操作量の情報をECU90に送信する。ECU90は、その情報に基づいてアクセルペダル31の操作量(アクセルペダル操作量AP)を取得する。
ブレーキペダル操作量センサ34は、ブレーキペダル33の操作量を検出するセンサである。ブレーキペダル操作量センサ34は、ECU90に電気的に接続されている。ブレーキペダル操作量センサ34は、検出したブレーキペダル33の操作量の情報をECU90に送信する。ECU90は、その情報に基づいてブレーキペダル33の操作量(ブレーキペダル操作量BP)を取得する。
操舵角センサ37は、中立位置に対するステアリングシャフト36の回転角度を検出するセンサである。操舵角センサ37は、ECU90に電気的に接続されている。操舵角センサ37は、検出したステアリングシャフト36の回転角度の情報をECU90に送信する。ECU90は、その情報に基づいてステアリングシャフト36の回転角度(操舵角θs)を取得する。
操舵トルクセンサ38は、自車両100の運転者が自車両100に入力したトルク(本例においては、ハンドル35を介してステアリングシャフト36に入力したトルク)を検出するセンサである。操舵トルクセンサ38は、ECU90に電気的に接続されている。操舵トルクセンサ38は、検出したトルクの情報をECU90に送信する。ECU90は、その情報に基づいて運転者がハンドル35を介してステアリングシャフト36に入力したトルク(ドライバー操舵操作力TQd)を取得する。
車速検出装置51は、自車両100の走行速度(車速)を検出する装置であり、例えば、車輪速センサである。車速検出装置51は、ECU90に電気的に接続されている。車速検出装置51は、検出した自車両100の車速の情報をECU90に送信する。ECU90は、その情報に基づいて自車両100の車速(自車速V)を取得する。
横加速度センサ52は、自車両100の横方向の加速度を検出するセンサである。横加速度センサ52は、ECU90に電気的に接続されている。横加速度センサ52は、検出した加速度の情報をECU90に送信する。ECU90は、その情報に基づいて自車両100の横方向の加速度(横加速度Gy)を取得する。
ヨーレートセンサ53は、自車両100のヨーレートを検出するセンサである。ヨーレートセンサ53は、ECU90に電気的に接続されている。ヨーレートセンサ53は、検出したヨーレートの情報をECU90に送信する。ECU90は、その情報に基づいて自車両100のヨーレート(ヨーレートdθy)を取得する。
周辺情報検出装置60は、自車両100の周辺の情報を検出する装置であり、本例においては、画像センサ61及び電波センサ62を備えている。画像センサ61は、例えば、カメラである。電波センサ62は、例えば、レーダセンサ(ミリ波レーダ等)である。尚、周辺情報検出装置60は、超音波センサ(クリアランスソナー)等の音波センサやレーザーレーダ(LiDAR)等の光センサを備えていてもよい。
画像センサ61は、ECU90に電気的に接続されている。画像センサ61は、自車両100の周辺を撮像し、撮像した画像の情報をECU90に送信する。ECU90は、その情報(画像情報II)に基づいて自車両100の周辺に関する情報(周辺検出情報IS)を取得することができる。
電波センサ62は、ECU90に電気的に接続されている。電波センサ62は、電波を発信すると共に、物体で反射した電波(反射波)を受信する。電波センサ62は、発信した電波及び受信した電波(反射波)に係る情報(検知結果)をECU90に送信する。別の言い方をすると、電波センサ62は、自車両100の周辺に存在する物体を検知し、その検知した物体に係る情報(検知結果)をECU90に送信する。ECU90は、その情報(電波情報)に基づいて自車両100の周辺に存在する構造物等の物体に係る情報(周辺検出情報IS)を取得することができる。
道路情報取得装置70は、自車両100が走行している道路に関する情報を取得する装置であり、本例においては、GPS装置71及び地図データベース72を備えている。
GPS装置71は、いわゆるGPS信号を受信する装置である。GPS装置71は、ECU90に電気的に接続されている。GPS装置71は、受信したGPS信号をECU90に送信する。ECU90は、受信したGPS信号に基づいて自車両100の現在位置(GPS座標系における自車両100の位置)を取得する。
地図データベース72は、地図情報のデータベースである。地図データベース72は、ECU90に電気的に接続されている。ECU90は、GPS信号に基づいて取得した自車両100の現在位置を地図データベース72の地図情報と照合して自車両100が走行している道路が一般道であるのか自動車専用道路であるのかを判別することができる。
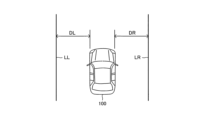
次に、車両運転支援装置10の作動の概要を説明する。車両運転支援装置10は、自車両100の走行中、自車両100が自車線LNから逸脱する可能性があるとの車線逸脱条件が成立した場合、後述するキャンセル条件(実行禁止条件)が成立していないことを条件として、図2に示したように、自車両100を自律的に操舵して自車両100が自車線LNから逸脱することを防止する車線逸脱防止制御を実行する。
又、運転者が自車両100を意図的に左側逸脱判定ラインLL又は右側逸脱判定ラインLRを越えて走行させようとすることがある。このとき、ドライバー操舵操作力TQdが比較的大きくなるので、車線逸脱条件が成立しても、ドライバー操舵操作力TQdが比較的大きい場合には、車線逸脱防止制御を実行しないことが望ましく、又、車線逸脱防止制御の実行中に、比較的大きいドライバー操舵操作力TQdが自車両100に入力された場合には、車線逸脱防止制御を停止することが望ましい。
ところで、道路には、大まかに、高速道路を含む自動車専用道路と一般道とがあるが、一般道は、自動車専用道路に比べ、その幅が狭く、又、自車両100の近くに他車両や人等が存在することも多い。従って、自車両100が一般道を走行しているときに車線逸脱防止制御により自車両100を自律的に操舵する場合、自車両100の走行安全性を担保するために、自車両100の挙動が大きく変化しないように自車両100を操舵したり、自車両100が横方向(自車線LNの幅方向)に大きく移動しないように自車両100を操舵したりすることが好ましい。
ところで、先に述べたように、運転者が自車両100を意図的に左側逸脱判定ラインLL又は右側逸脱判定ラインLRを越えて走行させようとすることがある。このとき、ドライバー操舵操作力TQdが比較的大きくなるので、車線逸脱条件が成立しても、ドライバー操舵操作力TQdが比較的大きい場合には、車線逸脱防止制御を実行しないことが望ましく、又、車線逸脱防止制御の実行中に、比較的大きいドライバー操舵操作力TQdが自車両100に入力された場合には、車線逸脱防止制御を停止することが望ましい。
又、例えば、自車両100が一般道を走行している場合、図6及び図7に示したように、自車両100が右折待機車両300(右折するために停止している他車両)を追い越すときに道路の左側の縁石202Lに近づいたが、キャンセル条件が成立して車線逸脱防止制御が実行されなかった場合、キャンセル条件が成立してから、自車両100が右折待機車両300を追い越した後、縁石202Lから離れ、自車線LN内に戻るまでには、一定の時間を要する。こうした場面において、キャンセル継続時間閾値Tthが短い時間に設定されていると、自車両100が右折待機車両300を追い越す前に車線逸脱条件が成立してしまい、車線逸脱防止制御が実行されてしまう可能性がある。
ところで、自車両100が一般道を走行しているときには、図6及び図7に示したように、右折待機車両300を自車両100が追い越すために自車線LNの左側に寄って走行することがあり、このとき、自車両100が左側区画線201Lを越えて走行することがある。このとき、左側区画線201Lを越えたからといって車線逸脱防止制御が実行されてしまうと、自車両100は、右折待機車両300をスムーズに追い越すことができない。
次に、車両運転支援装置10の具体的な作動を説明する。車両運転支援装置10のECU90のCPUは、図9に示したルーチンを所定演算周期で実行するようになっている。従って、所定のタイミングになると、CPUは、図9に示したルーチンのステップ900から処理を開始し、その処理をステップ905に進め、低速制御実行中フラグXexe_low及び高速制御実行中フラグXexe_highの値が「0」であるか否かを判定する。
Claims (5)
- 自車両を自律的に操舵して前記自車両が車線から逸脱することを防止する車線逸脱防止制御を実行する制御装置を備えた車両運転支援装置であって、
前記制御装置は、
前記自車両が車線を逸脱する可能性があり且つ前記自車両の運転者による操舵操作に基づいて前記車線逸脱防止制御の実行を禁止する実行禁止条件が成立していない場合、前記車線逸脱防止制御を実行し、
前記車線逸脱防止制御の実行中の前記自車両の挙動を表す挙動パラメータが挙動パラメータ上限値を超えないように前記自車両を操舵するように前記車線逸脱防止制御を実行し、
前記自車両が所定速度以下の速度で走行しているときには、前記自車両が前記所定速度よりも高い速度で走行しているときに比べ、前記挙動パラメータ上限値を小さくし、或いは、前記実行禁止条件が成立しづらくならないように該実行禁止条件を変更する、
ように構成されている、
車両運転支援装置において、
前記挙動パラメータは、前記車線逸脱防止制御により前記自車両が横方向に移動される距離である横移動距離である、
車両運転支援装置。 - 自車両を自律的に操舵して前記自車両が車線から逸脱することを防止する車線逸脱防止制御を実行する制御装置を備えた車両運転支援装置であって、
前記制御装置は、
前記自車両が車線を逸脱する可能性があり且つ前記自車両の運転者による操舵操作に基づいて前記車線逸脱防止制御の実行を禁止する実行禁止条件が成立していない場合、前記車線逸脱防止制御を実行し、
前記車線逸脱防止制御の実行中の前記自車両の挙動を表す挙動パラメータが挙動パラメータ上限値を超えないように前記自車両を操舵するように前記車線逸脱防止制御を実行し、
前記自車両が所定速度以下の速度で走行しているときには、前記自車両が前記所定速度よりも高い速度で走行しているときに比べ、前記挙動パラメータ上限値を小さくし、或いは、前記実行禁止条件が成立しづらくならないように該実行禁止条件を変更する、
ように構成されている、
車両運転支援装置において、
前記実行禁止条件は、前記実行禁止条件の成立により前記車線逸脱防止制御の実行が禁止されてから経過した時間が所定時間よりも短いとの条件であり、
前記制御装置は、前記所定時間を長い時間に設定することにより前記実行禁止条件が成立しづらくならないように該実行禁止条件を変更するように構成されている、
車両運転支援装置。 - 請求項1又は請求項2に記載の車両運転支援装置において、
前記挙動パラメータは、前記自車両の横加速度、操舵角及びヨーレートの少なくとも1つである、
車両運転支援装置。 - 請求項1乃至請求項3の何れか一項に記載の車両運転支援装置において、
前記実行禁止条件は、前記自車両の運転者により操舵操作力閾値以上の操舵操作力が前記自車両に入力されているとの条件であり、
前記制御装置は、前記操舵操作力閾値を小さい値に設定することにより前記実行禁止条件が成立しづらくならないように該実行禁止条件を変更するように構成されている、
車両運転支援装置。 - 自車両を自律的に操舵して前記自車両が車線から逸脱することを防止する車線逸脱防止制御を実行する制御装置を備えた車両運転支援装置において、
前記制御装置は、
前記自車両が車線を逸脱する可能性があり且つ前記自車両の運転者による操舵操作に基づいて前記車線逸脱防止制御の実行を禁止する実行禁止条件が成立していない場合、前記車線逸脱防止制御を実行し、
前記車線逸脱防止制御の実行中の前記自車両の挙動を表す挙動パラメータが挙動パラメータ上限値以下に制限されるように前記自車両を自律的に操舵するように前記車線逸脱防止制御を実行し、
前記自車両が自動車専用道路以外の一般道を走行しているときには、前記自車両が前記自動車専用道路を走行しているときに比べ、前記挙動パラメータ上限値を小さくし、或いは、前記実行禁止条件が成立しづらくならないように該実行禁止条件を変更する、
ように構成されている、
車両運転支援装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021175407A JP7614558B2 (ja) | 2021-10-27 | 2021-10-27 | 車両運転支援装置 |
| US17/965,317 US12291203B2 (en) | 2021-10-27 | 2022-10-13 | Vehicle driving support device |
| CN202211311962.XA CN116022142A (zh) | 2021-10-27 | 2022-10-25 | 车辆驾驶支援装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021175407A JP7614558B2 (ja) | 2021-10-27 | 2021-10-27 | 車両運転支援装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2023064937A JP2023064937A (ja) | 2023-05-12 |
| JP7614558B2 true JP7614558B2 (ja) | 2025-01-16 |
Family
ID=86057367
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021175407A Active JP7614558B2 (ja) | 2021-10-27 | 2021-10-27 | 車両運転支援装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US12291203B2 (ja) |
| JP (1) | JP7614558B2 (ja) |
| CN (1) | CN116022142A (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2025033405A (ja) | 2023-08-29 | 2025-03-13 | トヨタ自動車株式会社 | 車両制御装置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004243783A (ja) | 2002-11-20 | 2004-09-02 | Nissan Motor Co Ltd | 車線逸脱防止装置 |
| JP2011084165A (ja) | 2009-10-15 | 2011-04-28 | Nissan Motor Co Ltd | 路外逸脱防止装置 |
| JP2015205558A (ja) | 2014-04-18 | 2015-11-19 | トヨタ自動車株式会社 | 走行支援装置 |
| JP2019014369A (ja) | 2017-07-06 | 2019-01-31 | トヨタ自動車株式会社 | 車両走行支援装置 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003141694A (ja) | 2001-11-05 | 2003-05-16 | Hitachi Ltd | 車両の安全運転支援装置 |
| JP6653300B2 (ja) * | 2017-09-15 | 2020-02-26 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
| JP7085973B2 (ja) * | 2018-12-12 | 2022-06-17 | 本田技研工業株式会社 | 運転支援装置、車両、運転支援装置の制御方法および運転支援プログラム |
| JP7116012B2 (ja) | 2019-06-06 | 2022-08-09 | 本田技研工業株式会社 | 車両制御装置、車両、車両制御装置の動作方法およびプログラム |
| CN114026008B (zh) * | 2019-07-05 | 2023-09-01 | 本田技研工业株式会社 | 车辆的控制系统、车辆的控制方法以及存储介质 |
| JP7261782B2 (ja) * | 2020-10-29 | 2023-04-20 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
| JP7186206B2 (ja) * | 2020-10-29 | 2022-12-08 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
-
2021
- 2021-10-27 JP JP2021175407A patent/JP7614558B2/ja active Active
-
2022
- 2022-10-13 US US17/965,317 patent/US12291203B2/en active Active
- 2022-10-25 CN CN202211311962.XA patent/CN116022142A/zh active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004243783A (ja) | 2002-11-20 | 2004-09-02 | Nissan Motor Co Ltd | 車線逸脱防止装置 |
| JP2011084165A (ja) | 2009-10-15 | 2011-04-28 | Nissan Motor Co Ltd | 路外逸脱防止装置 |
| JP2015205558A (ja) | 2014-04-18 | 2015-11-19 | トヨタ自動車株式会社 | 走行支援装置 |
| JP2019014369A (ja) | 2017-07-06 | 2019-01-31 | トヨタ自動車株式会社 | 車両走行支援装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN116022142A (zh) | 2023-04-28 |
| US12291203B2 (en) | 2025-05-06 |
| JP2023064937A (ja) | 2023-05-12 |
| US20230125119A1 (en) | 2023-04-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3611069B1 (en) | Vehicle control device | |
| JP7172257B2 (ja) | 自動運転システム | |
| US12214784B2 (en) | Driving assistance control apparatus, driving assistance system, and driving assistance control method for vehicle | |
| US10661794B2 (en) | Driving assistance device | |
| JP4759547B2 (ja) | 走行支援装置 | |
| JP5300357B2 (ja) | 衝突防止支援装置 | |
| US20190308625A1 (en) | Vehicle control device | |
| JP7107095B2 (ja) | 自動運転システム | |
| JP2010163164A (ja) | 走行支援装置 | |
| US20200062244A1 (en) | Vehicle control device | |
| JP7226544B2 (ja) | 車両の走行制御方法及び走行制御装置 | |
| CN110446641B (zh) | 车辆控制装置和车辆控制方法 | |
| EP4001038B1 (en) | Vehicle control system, vehicle, and method of controlling vehicle | |
| JP7239353B2 (ja) | 車両における制動支援制御装置、制動支援制御システムおよび制動支援制御方法 | |
| JP7619235B2 (ja) | 走路逸脱防止装置 | |
| JP2011121501A (ja) | 車両制御装置 | |
| JP7614558B2 (ja) | 車両運転支援装置 | |
| US12179746B2 (en) | Vehicle collision avoidance assist apparatus and vehicle collision avoidance assist program | |
| JP7607743B2 (ja) | 車両のための回避軌道を決定するための方法 | |
| JP7371647B2 (ja) | 車両の制御装置、制御方法、制御プログラム | |
| JP7515782B2 (ja) | 車両制御システム | |
| JP7583991B2 (ja) | 車両制御システム | |
| JP2004249746A (ja) | 車両用追従走行制御装置 | |
| JP2023165271A (ja) | 車両制御システム及び車両制御方法 | |
| JP2022079120A (ja) | 車両制御システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20231108 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20240717 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240827 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240828 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20241127 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20241210 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7614558 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |