以下、添付される図面を参照しながら実施の形態について説明する。以下の実施の形態では、技術の説明のために詳細な特徴なども示されるが、それらは例示であり、実施の形態が実施可能となるためにそれらすべてが必ずしも必須の特徴ではない。
なお、図面は概略的に示されるものであり、説明の便宜のため、適宜、構成の省略、または、構成の簡略化が図面においてなされるものである。また、異なる図面にそれぞれ示される構成などの大きさおよび位置の相互関係は、必ずしも正確に記載されるものではなく、適宜変更され得るものである。また、断面図ではない平面図などの図面においても、実施の形態の内容を理解することを容易にするために、ハッチングが付される場合がある。
また、以下に示される説明では、同様の構成要素には同じ符号を付して図示し、それらの名称と機能とについても同様のものとする。したがって、それらについての詳細な説明を、重複を避けるために省略する場合がある。
また、本願明細書に記載される説明において、ある構成要素を「備える」、「含む」または「有する」などと記載される場合、特に断らない限りは、他の構成要素の存在を除外する排他的な表現ではない。
また、本願明細書に記載される説明において、「第1の」または「第2の」などの序数が使われる場合があっても、これらの用語は、実施の形態の内容を理解することを容易にするために便宜上使われるものであり、実施の形態の内容はこれらの序数によって生じ得る順序などに限定されるものではない。
また、本願明細書に記載される説明において、等しい状態であることを示す表現、たとえば、「同一」、「等しい」、「均一」または「均質」などは、特に断らない限りは、厳密に等しい状態であることを示す場合、および、公差または同程度の機能が得られる範囲において差が生じている場合を含むものとする。
<第1の実施の形態>
以下、本実施の形態に関する劣化判定システムについて説明する。
<劣化判定システムの構成について>
図1は、本実施の形態に関する固定または移動可能な無線設備を備える通信システムの構成の例を示す図である。
図1に例が示されるように、通信システム1は、鉄道車両などの移動体に搭載される移動可能な無線設備である車上無線装置12と、移動体ではない地上などに固定されている無線設備である地上無線装置14と、データを蓄積するデータ蓄積部16と、データ蓄積部16に蓄積されたデータを分析するデータ分析部18(後述の学習装置または推論装置)とを備える。
車上無線装置12と地上無線装置14とは、保守対象データを無線通信する。データ蓄積部16は、ネットワークを介して地上無線装置14からデータを受信して時系列の当該データを蓄積する。データ分析部18は、データの分析結果に基づいて、車上無線装置12または地上無線装置14の劣化判定、さらには、故障予測などを行う。
図2は、図1に例が示された通信システム1における車上無線装置12または地上無線装置14の構成の例を示す図である。
図2に例が示される無線装置101は、車上無線装置12または地上無線装置14であって、少なくとも、制御部20と、データ生成部102と、デジタル変調部103と、直交変調部104bと、周波数変換部(IF→RF)105と、ローカル発振部106と、増幅部107と、高周波伝送部108と、アンテナ109と、波形検波部110と、波形検波部110からの出力を増幅するフィードバック増幅部110bと、フィードバック増幅部110bからの出力が入力される周波数変換部(RF→IF)111と、直交復調部112と、振幅および位相測定部113と、給電部114と、電圧測定部115と、電流センサー116と、電流測定部117と、温度センサー118と、電力検波部119と、送信電力測定部120とを備える。制御部20は、記憶部22と、ソート部24とを備える。
データ生成部102は、入力されるユーザーサービスに対応する送信データ(音声、制御データなど)を生成して出力する。デジタル変調部103は、データ生成部102から出力される送信データをデジタル変調して、デジタル変調信号として出力する。
直交変調部104bは、デジタル変調部103から出力されるデジタル変調信号を、90度位相が異なる(すなわち、直交する)2次元の複素信号(IQ信号)に変換する。周波数変換部(IF→RF)105は、直交変調部104bから出力される2次元の複素信号(IQ信号)と、ローカル発振部106から入力されたローカル信号とを混合することでキャリア周波数に変換して、高周波信号を出力する。
増幅部107は、周波数変換部(IF→RF)105から出力される高周波信号を所望の電力に増幅して、高周波伝送部108を介してアンテナ109へ出力する。
一方で、波形検波部110は、増幅部107から出力される高周波信号の一部を検波信号として取り出す。周波数変換部(RF→IF)111は、検波信号と、ローカル発振部106から入力されたローカル信号とを混合することで検波信号の周波数をダウンコンバージョンして、IF(中間周波数)信号を出力する。
直交復調部112は、周波数変換部(RF→IF)111から出力されるIF(中間周波数)信号を、90度位相が異なる(すなわち、直交する)2次元の復調複素信号(IQ信号)に変換する。
ここで、無線装置101は、さらに歪補償部104aを備えていてもよい。歪補償部104aは、タイミングが揃えられた入力複素信号Si(デジタル変調部103から入力される信号)と復調複素信号So(直交復調部112から入力される信号)との差分である歪補償信号Se(エラー複素信号Se)を直交変調部104bへ出力する。
次に、それぞれの構成要素の特性を測定する動作について説明する。なお、以降では複数の構成要素の特性を測定する動作が例として説明されるが、単一の構成要素の特性を測定する場合であってもよいし、無線設備に備えられる構成要素のうちの一部の構成要素についてのみ特性の測定が行われてもよい。
振幅および位相測定部113は、歪補償部104aに入力される入力複素信号Siの振幅および位相、および、歪補償部104aから出力される歪補償信号Seの振幅および位相を測定する。記憶部22は、一定の周期で測定された入力複素信号Siの振幅および位相、または、歪補償信号Seの振幅および位相を記憶する。
ソート部24は、記憶部22に記憶された、入力複素信号Siの振幅と歪補償信号Se(エラー複素信号Se)の振幅および位相とを入力複素信号Siの振幅順に並べて、入力振幅対エラー振幅(AM/AM特性)のテーブルと、入力振幅対エラー位相(AM/PM特性)のテーブルとを生成する。
外部のデータ蓄積部16における判定部32は、入力振幅ごとのエラー振幅およびエラー位相が入力振幅ごとの基準値を超える場合(すなわち、あらかじめ定められた許容振幅の範囲または許容位相の範囲を超える値となる場合)に、無線装置101の電力増幅特性が劣化したか否かを判定する。なお、判定部32は、増幅部107から出力される無線信号と、増幅部107に入力される対応する無線信号とを直接比較して、増幅部107から出力される無線信号が、増幅部107に入力される対応する無線信号の振幅ごとに定められる振幅の基準値および位相の基準値を超える場合に、増幅部107が劣化していると判定してもよい。
給電部114は、増幅部107が入力された信号を電力増幅して出力するために必要な電力を、増幅部107に対してバイアス電圧として供給する。電圧測定部115は、給電部114が出力するバイアス電圧を測定する。
電流センサー116と電流測定部117とは、増幅部107がバイアス電圧から消費する供給電流を測定する。温度センサー118は、増幅部107からの発熱を含む増幅部107周辺の温度を測定する。
電力検波部119と送信電力測定部120とは、増幅部107が出力する送信電力を測定する。
<構成要素の特性の劣化と測定値との関係について>
図3は、無線装置101の電力増幅特性の劣化と無線装置101における構成要素の特性の劣化との関係の例を示す図である。また、図4は、周波数変換部(IF→RF)105と増幅部107とを含む構成の例を詳細に示す図である。
ここで、特性の劣化とは、経時変化などによって発揮される能力が低下することを意味し、たとえば、電力増幅特性であれば、電力の増幅量が低下することを意味する。図3には、無線装置101の電力増幅特性の劣化を示す測定値の変化、または、無線装置101における構成要素の特性の劣化を示す測定値の変化が示されている。
図3に例が示されるように、パワートランジスタ(すなわち、増幅部107)は、1次特性が相互コンダクタンスgm(または直流電流増幅率hFE)の低下である場合、2次特性が動作電流Id(Ic)の減少であり、出力特性(電波法特性)が出力(送信電力測定値)の低下である。また、パワートランジスタ(すなわち、増幅部107)は、1次特性が飽和電力(Psat)の低下である場合、2次特性がAM/AM特性の劣化またはAM/PM特性の劣化であり、出力特性(電波法特性)が隣接チャネル漏洩電力の劣化(漏洩電力の増加)である。
また、フィルターまたは整合回路などの周辺部品(すなわち、周波数変換部(IF→RF)105、周波数変換部(RF→IF)111または増幅部107など)は、1次特性がキャパシタの絶縁劣化(絶縁度の低下)またはインダクタの吸湿劣化である場合、2次特性が周波数特性の劣化であり、出力特性(電波法特性)が周波数特性の劣化である。また、フィルターまたは整合回路などの周辺部品は、1次特性がキャパシタの絶縁劣化(絶縁度の低下)またはインダクタの吸湿劣化である場合、2次特性が飽和電力(Psat)の低下であり、出力特性(電波法特性)がパワートランジスタの場合と同様に隣接チャネル漏洩電力の劣化(漏洩電力の増加)である。
また、給電部114は、1次特性がリップルの増大である場合、2次特性がエンベロープ波形にリップルが生じることであり、出力特性(電波法特性)が変調精度の劣化(すなわち、変調精度の低下)である。また、給電部114は、1次特性がバイアス電圧の低下である場合、2次特性が飽和電力(Psat)の低下であり、出力特性(電波法特性)がパワートランジスタの場合と同様に隣接チャネル漏洩電力の劣化(漏洩電力の増加)である。
また、ローカル発振部106は、1次特性が出力レベルの低下である場合、2次特性が飽和電力(Psat)の低下であり、出力特性(電波法特性)がパワートランジスタの場合と同様に隣接チャネル漏洩電力の劣化(漏洩電力の増加)である。また、ローカル発振部106は、1次特性が発振安定度の低下である場合、2次特性が位相雑音の増加であり、出力特性(電波法特性)が変調精度の劣化である。また、ローカル発振部106は、1次特性が構造の変化またはインピーダンスの変化である場合、2次特性が周波数のシフトであり、出力特性(電波法特性)が出力周波数偏差の劣化である。
また、グラウンド-アースは、1次特性がインピーダンスの増加(材質の変化または構造の変化)である場合、2次特性がノイズの混入であり、出力特性(電波法特性)がスプリアス特性の劣化(すなわち、不要な発射の増加)または変調精度の劣化である。
本実施の形態では、上記のうち、パワートランジスタの2次特性、フィルターまたは整合回路などの周辺部品の2次特性である周波数特性の劣化、フィルターまたは整合回路などの周辺部品の出力特性である隣接チャネル漏洩電力の劣化(漏洩電力の増加)、給電部114の1次特性であるバイアス電圧の低下、給電部114の出力特性、ローカル発振部106の出力特性である隣接チャネル漏洩電力の劣化(漏洩電力の増加)、ローカル発振部106の出力特性である変調精度の劣化、グラウンド-アースの出力特性を測定対象とする。
また、図4に例が示されるように、周波数変換部(IF→RF)105は、周波数混合器105aとフィルター105bとを備える。また、増幅部107は、パワートランジスタ107aと、整合回路107bとを備える。
図3に示される関係から分かるように、構成要素の2次特性、および、無線装置101の出力特性の変化を測定することによって、特性が劣化している構成要素を絞り込むことができる。そして、劣化している構成要素を早期に特定することによって、故障の予兆がある構成要素の修理または交換などを行うことができる。
<それぞれの特性と、対応する構成要素との関係について>
次に、図3に示されるそれぞれの特性と、対応する特性を測定する構成要素との関係について説明する。
図3におけるAM/AM特性と、AM/PM特性と、飽和電力(Psat)とは、図2における振幅および位相測定部113と記憶部22とソート部24とによって測定することができる。
まず、AM/AM特性と、AM/PM特性とについて説明する。増幅部107では、入力信号と全く同じ波形の出力信号が得られることが理想である。しかしながら、実際には非線形の応答によって波形が変化してしまう(すなわち、波形が歪んでしまう)。
図5は、増幅部107などにおける、入力振幅に対する出力振幅の特性であるAM/AM特性の例を示す図である。図5において、縦軸は出力振幅を示し、横軸は入力振幅を示す。図5に例が示されるように、入力振幅が大きいと出力振幅が飽和する(飽和点はPsat1およびPsat2)。図5では、基準となるAM/AM特性(たとえば、初期状態)が実線で示され、AM/AM特性が劣化している状態(すなわち、入力振幅に対して出力振幅が低下している状態)が点線で示される。
また、図6は、増幅部107などにおける、入力振幅に対する出力位相の特性であるAM/PM特性の例を示す図である。図6において、縦軸は出力位相を示し、横軸は入力振幅を示す。図6に例が示されるように、入力振幅に応じて出力位相の進み(遅れ)量が変化する。図6では、基準となるAM/PM特性(たとえば、初期状態)が実線で示され、AM/PM特性が劣化している状態(すなわち、入力振幅に対して出力位相が低下している状態)が点線で示される。
AM/AM特性およびAM/PM特性は、増幅部107の入力と増幅部107の出力との関係を示す特性であるため、増幅部107の入力振幅と、増幅部107の出力振幅と、増幅部107の出力位相とを測定して求めてもよい。
ここで、増幅部107の入出力のRF(無線周波数)信号を測定するためには、当該信号の周波数よりも高い周波数でサンプリングする必要がある。しかしながら、一般にそのようなサンプリングを行うための構成を実装することは難しい。
そこで、RF信号を測定する代わりに、直交変調部104bの出力であるIF(中間周波数)信号と、周波数変換部(RF→IF)111の出力であるIF(中間周波数)信号とを測定してもよい。
また、同様に、デジタル変調部103の出力であるベースバンド複素信号と直交復調部112の出力であるベースバンド複素信号とを測定してもよい。なお、図5および図6では、上記のベースバンド複素信号が測定されている。
図3におけるパワートランジスタの動作電流Id(Ic)は、電流測定部117で測定することができる。また、図3における給電部114のバイアス電圧は、電圧測定部115で測定することができる。
次に、図3における周波数特性について説明する。増幅部107またはその周辺の構成要素(たとえば、周波数変換部)は、一般に、所望の特性を保証する周波数帯域幅を有する。
図7は、増幅部107などにおける、入力周波数に対する出力振幅の特性の例を示す図である。図7において、縦軸は出力振幅を示し、横軸は入力周波数を示す。図7では、基準となる周波数特性(たとえば、初期状態)が実線で示され、周波数特性が劣化している状態(すなわち、入力周波数に対して出力振幅が低下している状態)が点線で示される。なお、Psatは飽和点である。
図7に例が示されるように、上記の周波数帯域幅において、周波数が変化しても特性(すなわち、出力振幅)が均一となるように、増幅部107などは設計され、製造されている。
すなわち、周波数特性は、複数の周波数チャネルの信号に対する、増幅部107またはその周辺の構成要素の特性の均一性を示すものである。周波数特性は、上記のAM/AM特性またはAM/PM特性などを、周波数チャネルごとに測定することで得ることができる。
次に、図3における変調精度について説明する。デジタル多値変調方式では、送信する信号を2次元複素座標にマッピングして送信する。信号の変調精度が低下すると、上記のようにマッピングされた信号の2次元複素座標にバラツキを生じる。
図8および図9は、増幅部107などにおける、信号の変調精度の例を示す概念図である。図8および図9に例が示されるように、送信する信号は、2次元複素座標にマッピングされる。
2次元複素座標にマッピングされる送信信号は、理想的には図8に例が示されるように、有限個の座標点(図8では、(1,1)、(1,-1)、(-1,-1)、(-1,1)の4点)のいずれかとなる。
しかしながら、増幅部107の変調精度が低下すると、図9に例が示されるように、マッピングされた点が有限個の座標点からばらつく。
振幅および位相測定部113において、歪補償部104aから出力される歪補償信号Seの振幅および位相を測定し、さらに、当該振幅および位相をシンボルタイミングでサンプリングしたものが、期待する座標点からの振幅誤差(位相誤差)すなわち、変調精度を示すものとなる。
<AM/PM特性の測定方法1(歪補償なし)について>
次に、無線装置101を使う、増幅部107のAM/AM特性の測定方法と、増幅部107のAM/PM特性の測定方法とを具体的に説明する。ここで時間tにおける入力信号Si(t)と、出力信号So(t)と、エラー信号Se(t)とは、以下のように示される。
ここで、Ai(t)は入力信号の振幅を示し、φi(t)は入力信号の位相を示し、Ao(t)は出力信号の振幅を示し、φo(t)は出力信号の位相を示し、Ae(t)=Ao(t)-Ai(t)は、エラー信号の振幅を示し、φe(t)=φo(t)-φi(t)は、エラー信号の位相を示し、T(t)は温度を示す。
図10は、制御部20、制御部20における記憶部22、制御部20におけるソート部24、データ蓄積部16およびデータ蓄積部16における判定部32の動作の例を示すフローチャートである。
まず、記憶部22が、振幅および位相測定部113において測定されたAi(t)と、Ae(t)と、Φe(t)と、温度センサー118において測定されたT(t)とを少なくとも一時的に記録する(ステップST101)。
次に、ステップST102では、制御部20によって、これらの測定値の記録が、特定の測定周期だけ繰り返されたか否かが判定される。そして、特定の測定周期が経過している場合、すなわち、図10に例が示されるステップST102から分岐する「YES」に対応する場合には、図10に例が示されるステップST103へ進む。一方で、特定の測定周期が経過していない場合、すなわち、図10に例が示されるステップST102から分岐する「NO」に対応する場合には、図10に例が示されるステップST101に戻る。
次に、ステップST103では、ソート部24が、時系列データである温度T(t)を、温度しきい値を基準として、複数の温度グループに分類する。温度グループの数は、たとえば、異常低温、低温、準低温、平温、準高温、高温または異常高温などの特徴を抽出して分類するために適切な数とする。
次に、ステップST104では、ソート部24が、時系列データであるAi(t)と、時系列データであるAe(t)と、時系列データであるΦe(t)とを、時間tに対応する上記の温度グループに分類する。
次に、ステップST105では、ソート部24が、温度グループごとに分類されたAi(t)と、Ae(t)と、Φe(t)とを、Ai(t)でソートする。
次に、ステップST106では、ソート部24が、温度グループごとのAi(t)とAe(t)との比率を最小2乗誤差法などを使って平準化する。そして、平準化された当該値を増幅部107のAM/AM特性とする。
次に、ステップST107では、ソート部24が、温度グループごとのAi(t)とΦe(t)との比率を最小2乗誤差法などを使って平準化する。そして、平準化された当該値を増幅部107のAM/PM特性とする。
次に、ステップST108では、判定部32が、上記のように取得されたAM/AM特性とAM/PM特性とに基づいて、温度グループごとおよび入力振幅ごとのエラー振幅またはエラー位相が、温度グループごとおよび入力振幅ごとの対応する基準値を超える場合に、増幅部107の劣化があると判定する。
次に、ステップST109では、データ蓄積部16が、測定周期ごとおよび温度グループごとに、AM/AM特性およびAM/PM特性を記録し、かつ、当該データを蓄積する。
次に、ステップST110では、制御部20が、ユーザーなどから動作を終了する命令が受け付けられているかを判定する。そして、動作を終了する命令が受け付けられている場合、すなわち、図10に例が示されるステップST110から分岐する「YES」に対応する場合には、動作を終了する。一方で、動作を終了する命令が受け付けられていない場合、すなわち、図10に例が示されるステップST110から分岐する「NO」に対応する場合には、図10に例が示されるステップST101に戻る。
なお、図10では、温度の影響を取り除くために複数の温度グループに分類されたが、温度測定値である温度T(t)を使わず温度グループの分類を行わない場合であっても、増幅部107の劣化を判定することができることは自明である。
<AM/PM特性の測定方法2(フィードバック歪補償)について>
次に、歪補償を行う場合の、増幅部207のAM/AM特性を測定する方法と、増幅部207のAM/PM特性を測定する方法とを以下に説明する。歪補償の方法としては、フィードバック歪補償、フィードフォワード歪補償、または、プレディストーション歪補償などが知られている。
図11は、歪補償部104aと増幅部207とを含む構成の例を詳細に示す図である。図11では、増幅部207の出力信号である復調複素信号Soに基づいてフィードバック歪補償を行うフィードバック増幅部110cが設けられる。
増幅部207は、増幅率Aである理想増幅器125に歪みDが加わるモデルとして表される。フィードバック増幅部110cは、増幅率1/Kの増幅器である。歪補償部104aは、フィードバック増幅部110cから入力されるフィードバック信号と入力複素信号Siとの差分を歪補償信号Seとして出力する負帰還フィードバック回路である。
フィードバック歪補償は、増幅部207の出力信号である復調複素信号Soに加わった歪み成分Dを負帰還で打ち消すことができる。これによって、当該歪みを低減させることができる。
図12は、AM/AM特性の例と、AM/PM特性の例とを示す図である。図12において、縦軸は出力振幅または出力位相を示し、横軸は入力振幅を示す。図12では、理想増幅器125のAM/AM特性とAM/PM特性とが、破線で示されている。一方で、図12では、実際の増幅部107のAM/AM特性とAM/PM特性とが、実線で示されている。
図12において、実際の増幅部107のAM/AM特性はグラフ1001で示され、理想増幅器125のAM/AM特性はグラフ1002で示される。グラフ1002は、傾きAの直線である。グラフ1001とグラフ1002との差分が、増幅器の歪みDの振幅を表すことになる。
同様に、実際の増幅部107のAM/PM特性はグラフ1003で示され、理想増幅器125のAM/PM特性はグラフ1004で示される。グラフ1003とグラフ1004との差分が、増幅器の歪みDの位相を表すことになる。
図13は、歪補償部104aのAM/AM特性の例と、歪補償部104aのAM/PM特性の例とを示す図である。図13において、縦軸は歪補償信号Seを示し、横軸は入力振幅を示す。
図13において、歪補償部104aのAM/AM特性はグラフ1005で示される。また、歪補償部104aのAM/PM特性はグラフ1006で示される。
歪補償部104aのAM/AM特性およびAM/PM特性は、増幅部207の歪みDを打ち消すために、増幅部207のAM/AM特性およびAM/PM特性の逆特性になることが知られている。
したがって、歪補償部104aのAM/AM特性およびAM/PM特性を測定することは、増幅部207のAM/AM特性およびAM/PM特性を測定することと等価となる。
歪補償信号Seは、以下のように示される。
ここで、Ae(t)は歪補償信号Seの振幅を示し、φe(t)は歪補償信号Seの位相を示す。
図10に示されたフローチャートによれば、フィードバック増幅部110cによってフィードバック歪補償が行われる増幅部207の劣化を判定し、かつ、増幅部207のAM/AM特性およびAM/PM特性を取得することができる。
<AM/PM特性の測定方法3(プレディストーション歪補償)について>
図14は、歪補償部を含む構成の例を示す図である。図14では、歪補償部としてプレディストーション歪補償部131が設けられている。
プレディストーション歪補償部131は、適応デジタル-プレディストーション(Adaptive Digital Pre-Distortion:ADPD)で構成される。プレディストーション歪補償部131は、入力されたデジタル複素信号を、デジタル信号処理で増幅器の歪みの逆歪みを有する歪補償デジタル複素信号に変換して出力する。
デジタル-アナログ変換部132は、プレディストーション歪補償部131から出力された歪補償デジタル複素信号を歪補償アナログ複素信号に変換して出力する。直交変調部104bは、デジタル-アナログ変換部132から出力された歪補償アナログ複素信号を直交変調して、歪補償信号Seとして周波数変換部(IF→RF)105に出力する。
ここで、プレディストーション歪補償部131のデジタル信号処理には、多項式による近似またはLUT(Look Up Table)などの方式が用いられる。
直交復調部112は、周波数変換部(RF→IF)111から出力されるIF(中間周波数)信号、すなわち、フィードバック信号を直交復調して、復調複素信号(IQ信号)として出力する。アナログ-デジタル変換部138は、直交復調部112から出力されるアナログの復調複素信号(IQ信号)を、デジタル復調複素信号に変換して出力する。
一方で、遅延部141は、プレディストーション歪補償部131に入力されるデジタル複素信号(入力デジタル複素信号)を遅延させて、入力デジタル複素信号とデジタル復調複素信号とのタイミングを揃える。入出力比較部139は、タイミングが揃っている入力デジタル複素信号とデジタル復調複素信号との差分をデジタルエラー複素信号Seとしてプレディストーション歪補償部131へ出力する。
適応動作部140は、デジタルエラー複素信号Seが0に漸近するように、プレディストーション歪補償部131のデジタル信号処理のパラメータを適応させる(すなわち、変更する)。
振幅および位相測定部113は、タイミングが揃っている入力デジタル複素信号とデジタルエラー複素信号Seとについて、それぞれの振幅および位相を測定する。デジタルエラー複素信号Se(歪補償信号Se)は、以下のように示される。
ここで、Ae(t)はデジタルエラー複素信号の振幅を示し、φe(t)はデジタルエラー複素信号の位相を示す。
図10に示されたフローチャートによれば、プレディストーション歪補償部131によってプレディストーション歪補償が行われる増幅部107の劣化を判定し、かつ、増幅部107のAM/AM特性およびAM/PM特性を取得することができる。
ここで、プレディストーション歪補償部131のデジタル信号処理のパラメータは、製造時の増幅部107のAM/AM特性およびAM/PM特性に合わせて、デジタルエラー複素信号Seが0に漸近するように初期値が決められる。適応動作部140は、増幅部107の特性が経年などに起因して変化しても、プレディストーション歪補償部131が行うプレディストーション歪補償をそれに追従させる。
言い換えると、プレディストーション歪補償部131のデジタル信号処理のパラメータ(多項式近似式の係数、LUTの変換係数)の変化は、増幅部107のAM/AM特性およびAM/PM特性の変化を表す。
そこで、図10に示されたフローチャートのステップST101、ステップST103からステップST107を省略して、プレディストーション歪補償部131のデジタル信号処理のパラメータ(多項式近似式の係数、LUTの変換係数)をAM/AM特性およびAM/PM特性としてもよい。
なお、上記のAM/AM特性およびAM/PM特性を解析、記録または蓄積する機能は、無線装置101に備えられる構成によってなされてもよいし、ネットワークなどを介して接続される他の装置に備えられる構成によってなされてもよい。さらに、上記の機能の一部が無線装置101に備えられる構成によってなされ、他の機能がネットワークなどを介して接続される他の装置に備えられる構成によってなされてもよい。
また、図2に示された電圧測定部115が測定する電圧と、電流測定部117が測定する電流と、送信電力測定部120が出力する送信電力と、変調精度とは、同時に測定されて記録されてもよい。
<劣化している構成要素の特定について>
次に、振幅および位相測定部113から入力される測定値以外の測定値を使って、劣化している構成要素を特定する方法について説明する。
まず、記憶部22が、図2に示される送信電力測定部120が測定する送信電力測定値と、図2に示される電圧測定部115が測定する電圧測定値と、図2に示される電流測定部117が測定する電流測定値とを記憶する。
そして、判定部32は、図10におけるステップST108に示されたように増幅部107の劣化があると判定した場合、さらに、以下の基準で劣化している構成要素を特定する。
まず、出力(送信電力測定値)の低下、および、電流測定値の変化を伴う場合に、判定部32は、増幅部107におけるパワートランジスタ107aを劣化している構成要素として特定する。
次に、出力(送信電力測定値)と電流測定値とが変化せず、入力振幅の大きさに比例してエラー振幅が大きくなる場合に、判定部32は、ローカル発振部106を、出力レベルの低下に起因して劣化している構成要素として特定する。
次に、出力(送信電力測定値)と電流測定値とが変化せず、入力振幅の大きさによらずエラー位相が大きい場合に、判定部32は、給電部114を、リップル増大またはグラウンドからのノイズ混入に起因して劣化している構成要素として特定する。
<試験信号によるAM/AM測定、AM/PM測定、周波数特性測定について>
上記では、増幅部107のAM/AM特性およびAM/PM特性を取得する際に、運用中のユーザーデータを使う前提で説明されたが、ユーザーデータを送信しなくてよいタイミングがあれば、試験信号を生成してユーザーデータの代わりに測定してもよい。
試験信号は、振幅が最小値から最大値に直線的に、かつ、周期的に変化する三角波、または、それをさらに遅い周期で周波数切り替えすることで生成される信号などである。試験信号を用いることで、AM/AM測定およびAM/PM測定が容易になる。さらに、周波数特性の測定も容易になる。
上記の場合の制御部20の動作について、以下に説明する。
図15は、本実施の形態に関する制御部20の動作の例を示すフローチャートである。
まず、ステップST121において、制御部20は、無線通信規格などに基づいて通信が不要か否かを判定する。そして、通信が不要である場合、すなわち、図15に例が示されるステップST121から分岐する「YES」に対応する場合には、図15に例が示されるステップST122へ進む。一方で、通信が不要でない(すなわち、通信が必要である)場合、すなわち、図15に例が示されるステップST121から分岐する「NO」に対応する場合には、図15に例が示されるステップST112へ進む。
ステップST121において通信が不要であると判定された場合、制御部20は、以下のように振幅および移相を測定させる。
ステップST122では、制御部20は、データ生成部102に対して、ユーザーデータに代えて試験信号を生成させ、かつ、出力させる。
次に、ステップST123において、制御部20は、高周波伝送部108に対して、アンテナ109への出力を停止させる。
次に、ステップST124において、制御部20は、振幅および位相測定部113に対して、振幅および位相を測定させる。
次に、ステップST125において、制御部20は、振幅および位相測定部113において測定された振幅および位相を、記憶部22にデータとして記録する。
一方で、ステップST121において通信が不要でない(必要である)と判定された場合、制御部20は、以下のように無線装置101を基本動作に戻す。
ステップST112では、制御部20は、データ生成部102に対して、ユーザーデータを選択して出力させる。
次に、ステップST113において、制御部20は、高周波伝送部108に対して、アンテナ109へ出力させる。
次に、ステップST104において、制御部20は、振幅および位相測定部113に対して、振幅および位相の測定を停止させる。
次に、ステップST115において、制御部20は、振幅および位相のデータの記録を停止する。
<通信規格において測定タイミングを規定する場合について>
次に、通信規格に測定タイミングを規定する場合の動作について説明する。
図16は、通信規格に通信しない時間を規定する場合の、無線装置101の動作の例を示すタイミングチャートである。
通信規格P01において、通信許可P02は、周期的に通信を禁止する時間を設けることを示す。通信を禁止する時間は、たとえば、通信規格で決められている無線フレームP03について、Nフレーム周期で通信休止フレームを1フレーム設けるなどである。
この通信しない時間を規定する通信規格に対する無線装置101の動作を、図2と図16とを参照しつつ説明する。
データ生成部102は、通信許可のタイミングでユーザーデータを選択して出力する。また、データ生成部102は、通信禁止のタイミングで試験信号を生成して出力する。
高周波伝送部108は、増幅された高周波信号を、通信許可のタイミングでアンテナ109へ出力する。また、高周波伝送部108は、通信禁止のタイミングでアンテナ109への出力を停止する。
振幅および位相測定部113は、通信許可のタイミングで動作を停止する。また、振幅および位相測定部113は、通信禁止のタイミングで直交復調部112が出力するデジタル復調信号(復調複素信号)から振幅および位相を測定する。
データ蓄積部16は、振幅および位相測定部113が振幅および位相の測定を完了した際に、振幅および位相の測定値をデータとして追加して蓄積する。データ蓄積部16が蓄積するデータは、無線装置101の運用期間に相当する膨大な量になる。そのため、データ蓄積部16は、複数個のデータについて平均化などの処理をしてデータ量の圧縮を行ってもよい。
<第2の実施の形態>
本実施の形態に関する劣化判定システムについて説明する。なお、以下の説明においては、以上に記載された実施の形態で説明された構成要素と同様の構成要素については同じ符号を付して図示し、その詳細な説明については適宜省略するものとする。
<劣化判定システムの構成について>
第1の実施の形態では、増幅部107の特性を測定するために、増幅部107の入出力において振幅および位相を測定し、これらの値を使ってAM/AM特性およびAM/PM特性を出力する方法が示された。一方で本実施の形態では、増幅部107の出力信号を、時間領域の信号から周波数領域の信号に変換してスペクトラム特性を求める方法について説明する。
通信システムの構成は、たとえば、図1に示されたものと同様である。
図17は、本実施の形態に関する、固定または移動可能な無線設備の構成の例を示す図である。
図17に例が示される無線装置101Aは、少なくとも、制御部20Aと、データ生成部102と、デジタル変調部103と、直交変調部104bと、周波数変換部(IF→RF)105と、ローカル発振部106と、増幅部107と、高周波伝送部108と、アンテナ109と、波形検波部110と、フィードバック増幅部110aと、給電部114と、電圧測定部115と、電流センサー116と、電流測定部117と、温度センサー118と、電力検波部119と、送信電力測定部120と、アナログ-デジタル変換部138と、記録部202と、高速フーリエ変換(fast fourier transform、すなわち、FFT)部203と、スペクトラム解析部204とを備える。制御部20Aは、判定部26を備える。
直交変調部104bは、デジタル変調部103から出力されるデジタル変調信号を、歪補償しつつ、90度位相が異なる(すなわち、直交する)2次元の複素信号(IQ信号)に変換する。周波数変換部(IF→RF)105は、直交変調部104bから出力される2次元の複素信号(IQ信号)と、ローカル発振部106から入力されたローカル信号とを混合することでキャリア周波数に変換して、高周波信号を出力する。
本実施の形態では、図2における振幅および位相測定部113に代えて、増幅部107の出力側に、スペクトラムを測定するためのスペクトラム解析部204などが接続される。スペクトラムを測定する動作について、図17を参照しつつ以下説明する。
増幅部107の出力の一部は、フィードバック信号として波形検波部110から取り出される。そして、アナログ-デジタル変換部138は、フィードバック増幅部110aから出力されるフィードバック信号をデジタル信号に変換する。
続いて、記録部202は、アナログ-デジタル変換部138から出力されるデジタル信号を、一定の時間メモリなどの記録デバイスに蓄積して記録する。
そして、FFT部203は、記録部202に記録された一定時間のデジタル信号を、高速フーリエ変換によって、周波数領域のデジタル信号に変換する。
さらに、スペクトラム解析部204は、FFT部203から出力される周波数領域のデジタル信号から、増幅部107のスペクトラム特性を抽出する。
図18および図19は、FFTによって時間領域信号を周波数領域信号に変換する概念を示す概念図である。図18においては、縦軸が振幅(電力)を示し、横軸が時間を示す。また、図19においては、縦軸が振幅(電力)を示し、横軸が周波数を示す。
増幅部107から出力される信号は、図18に示されるような時間領域の波形を有する信号である。一方で、FFT部203から出力される信号は、図19に示されるような周波数領域の波形を有する信号である。
デジタル通信方式のデジタル変調信号では、厳しい帯域制限がかけられることが知られている。上記の周波数領域の信号は、図19に示されるように帯域内領域に信号の電力が集中するという特徴を有する。具体的には、周波数領域の信号は、帯域内領域の周波数の下側と上側とに隣接チャネル領域を有し、さらにその外側に帯域外領域を有する。
電波法では、帯域内領域、隣接チャネル領域または帯域外領域などのそれぞれの周波数領域での出力電力(すなわち、振幅)の基準が定められている。たとえば、帯域外領域の周波数領域で基準を超える出力電力(すなわち、振幅)の不要発射成分があると、電波法違反となる。
<スペクトラム特性の測定方法1(歪補償なし)について>
スペクトラム解析部204は、スペクトラム特性を解析して、たとえば、帯域内領域、隣接チャネル領域または帯域外領域などのそれぞれの周波数領域での電波法基準に対する、解析結果のマージン量を特徴量として抽出する。この場合、対象の帯域幅で、特徴がある周波数があらかじめ分かっていれば、その周波数に絞って特徴量を抽出してもよい。判定部26は、解析結果の周波数ごとのマージン量が対応する周波数における基準値を下回る場合(すなわち、マージン量が、周波数ごとに定められるしきい値を超えて低下している場合)に、増幅部107が劣化していると判定する。
<構成要素の特性の劣化と測定値との関係について>
無線装置101の電力増幅特性の劣化と無線装置101における構成要素の特性の劣化との関係は、図3に示されたとおりである。
スペクトラムを測定する方法では、図3の出力特性のうちの「スプリアス特性劣化(不要発射増加)」を検出することができる。
また、図3のAM/AM特性の変化およびAM/PM特性の変化は、隣接チャネル領域におけるスペクトラムに表れることが知られている。したがって、本実施の形態での測定方法は、第1の実施の形態での測定方法に置き換えることができる。
増幅部107は、温度に応じて特性が変化する。そのため、温度に起因する特性の変化か、経年劣化に起因する特性の変化かを見極めることが重要である。
図17に示される判定部26は、上記の隣接チャネル領域における電力成分、または、帯域外領域における電力成分などのスペクトラム特性を、第1の実施の形態と同様に、同時に測定された温度の影響を取り除いて判定することで、増幅部107の劣化判定の精度を向上させることができる。
<スペクトラム特性の測定方法2(フィードバック歪補償あり)について>
図20は、フィードバック方式の歪補償を行う場合の、固定または移動可能な無線設備の構成の例を示す図である。
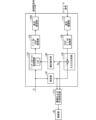
図20に例が示される無線装置101Bは、少なくとも、制御部20Aと、データ生成部102と、デジタル変調部103と、フィードバック方式の歪補償および直交変調部104と、周波数変換部(IF→RF)105と、ローカル発振部106と、増幅部107と、高周波伝送部108と、アンテナ109と、波形検波部110と、波形検波部110からの出力を増幅するフィードバック増幅部110bと、フィードバック増幅部110bからの出力が入力される周波数変換部(RF→IF)111と、直交復調部112と、給電部114と、電圧測定部115と、電流センサー116と、電流測定部117と、温度センサー118と、電力検波部119と、送信電力測定部120と、アナログ-デジタル変換部201と、記録部202と、FFT部203と、スペクトラム解析部204とを備える。制御部20Aは、判定部26を備える。
本実施の形態では、増幅部107の出力であるフィードバック信号の代わりに、歪補償および直交変調部104が出力する歪補償信号SeをFFT変換する。
アナログ-デジタル変換部201は、歪補償および直交変調部104が出力する歪補償信号Seをデジタル信号に変換する。
続いて、記録部202は、アナログ-デジタル変換部201から出力されるデジタル信号を、一定の時間メモリなどの記録デバイスに蓄積して記録する。
そして、FFT部203は、記録部202に記録された一定時間のデジタル信号を、高速フーリエ変換によって、周波数領域のデジタル信号に変換する。
さらに、スペクトラム解析部204は、FFT部203から出力される周波数領域のデジタル信号から、増幅部107のスペクトラム特性を抽出する。
第1の実施の形態で説明されたように、フィードバック方式の歪補償では、歪補償信号は、増幅部107の歪み特性の逆特性を有する信号になる。したがって、歪補償信号のスペクトラム解析は、フィードバックがない場合の、増幅部107の出力のスペクトラム解析と等価になる。
<スペクトラム特性の測定方法3(プレディストーション歪補償あり)について>
図21は、歪補償および直交変調部を含む構成の例を示す図である。図21では、プレディストーション歪補償部131が設けられている。プレディストーション歪補償部131は、適応デジタル-プレディストーションで構成される。プレディストーション歪補償部131は、入力されたデジタル複素信号を、デジタル信号処理で増幅器の歪みの逆歪みを有する歪補償デジタル複素信号に変換して出力する。
図21に示される構成では、増幅部107の出力であるフィードバック信号の代わりに、入出力比較部139が出力するエラー信号をFFT変換する。
デジタル-アナログ変換部132は、プレディストーション歪補償部131から出力された歪補償デジタル複素信号を歪補償アナログ複素信号に変換して出力する。直交変調部133は、デジタル-アナログ変換部132から出力された歪補償アナログ複素信号を直交変調して、歪補償信号Seとして周波数変換部(IF→RF)105に出力する。
直交復調部112は、周波数変換部(RF→IF)111から出力されるIF(中間周波数)信号、すなわち、フィードバック信号を直交復調して、復調複素信号(IQ信号)として出力する。アナログ-デジタル変換部138は、直交復調部112から出力されるアナログの復調複素信号(IQ信号)を、デジタル復調複素信号に変換して出力する。
FFT部203は、記録部202に記録された一定時間のデジタルエラー信号を、高速フーリエ変換によって、周波数領域のデジタル信号に変換する。
さらに、スペクトラム解析部204は、FFT部203から出力される周波数領域のデジタル信号から、増幅部107のスペクトラム特性を抽出する。
第1の実施の形態で説明されたように、プレディストーション方式の歪補償では、エラー信号が0になるように、プレディストーションのパラメータ(Look Up Tableの係数など)が決められており、エラー信号は増幅部107の歪みの変化を表す信号になる。
したがって、エラー信号のスペクトラム解析は、増幅部107の歪み出力のスペクトラム解析と等価になる。
<劣化している構成要素の特定について>
スペクトラム特性以外の測定値を使って、劣化している構成要素を特定する方法について説明する。
まず、記憶部22が、図17に示される送信電力測定部120が測定する送信電力測定値と、図17に示される電圧測定部115が測定する電圧測定値と、図17に示される電流測定部117が測定する電流測定値とを、スペクトラム特性と一緒に記録する。
そして、判定部26は、図10におけるステップST108に示されたように増幅部107の劣化があると判定した場合、さらに、以下の基準で劣化している構成要素を特定する。
まず、出力(送信電力測定値)の低下、および、電流測定値の変化を伴う場合に、判定部26は、パワートランジスタ(増幅部107)を劣化している構成要素として特定する。
次に、出力(送信電力測定値)と電流測定値とが変化せず、隣接チャネル領域の電力全体が大きくなる場合に、判定部26は、ローカル発振部106を、出力レベルの低下に起因して劣化している構成要素として特定する。
次に、出力(送信電力測定値)と電流測定値とが変化せず、特定の周波数の不要発射成分が大きい場合に、判定部26は、給電部114を、リップル増大またはグラウンドからのノイズ混入に起因して劣化している構成要素として特定する。
なお、記録部202、FFT部203、スペクトラム解析部204および判定部26は、無線装置101Bに備えられる構成であってもよいし、ネットワークなどを介して接続される他の装置に備えられる構成であってもよい。
また、図2または図20に示された電圧測定部115が測定する電圧と、電流測定部117が測定する電流と、送信電力測定部120が出力する送信電力とは、同時に測定されて記録されてもよい。
<試験信号によるスペクトラム特性解析、周波数特性測定について>
上記では、増幅部107のスペクトラム特性解析の際に、運用中のユーザーデータを使う前提で説明されたが、ユーザーデータを送信しなくてよいタイミングがあれば、試験信号を生成してユーザーデータの代わりに測定してもよい。
試験信号は、正弦波または任意の周波数離調された2つの正弦波が合成された信号、または、それらをさらに遅い周期で周波数切り替えすることで生成される信号などである。試験信号を用いることで、スペクトラム特性解析が容易になる。さらに、周波数特性の測定も容易になる。
たとえば、正弦波は信号のエンベロープの変動がないので、不要発射の成分を見つけることに適している。また、任意の周波数離調された2つの正弦波が合成された信号は、入力信号の周波数から、離調周波数幅の整数倍離れた周波数に歪成分が現れることが分かっており、ピンポイントの周波数で歪み量を測ることに適している。
試験信号を用いるタイミングについては、第1の実施の形態で示された場合と同様に、周期的に通信しなくてよい時間帯を無線通信規格において設け、図16に示されたタイミングチャートの場合と同様に、その時間帯に試験信号を生成して測定を行ってもよい。
<第3の実施の形態>
本実施の形態に関する劣化判定システム、学習装置、および、推論装置について説明する。なお、以下の説明においては、以上に記載された実施の形態で説明された構成要素と同様の構成要素については同じ符号を付して図示し、その詳細な説明については適宜省略するものとする。
<劣化判定システムの構成について>
第1の実施の形態および第2の実施の形態では、増幅部107について、構成要素の劣化の判定基準が分かっているものとして説明された。一方で本実施の形態では、学習装置および推論装置を使って判定方法を学習し、判定(推論)の精度を向上させる方法について説明する。なお、本実施の形態が、第1の実施の形態または第2の実施の形態と組み合わせることができることは自明である。
通信システムの構成は、たとえば、図1に示されたものと同様である。
<学習フェーズについて>
図22は、無線設備に関する機械学習を行う学習装置の構成の例を概念的に示す図である。図22に例が示されるように、学習装置300は、データ取得部302と、モデル生成部304とを備える。
データ取得部302は、上記の時系列の特性データと、測定データ(AM/AM特性、AM/PM特性、スペクトラム特性、温度測定値、電流測定値、電圧測定値または送信電力測定値などのデータ)と、無線設備の製造データ(製造ロット、部品ロット、製造工場、検査データなど)とをデータB11として取得する。データB11のうち、時系列の特性データと、測定データ(AM/AM特性、AM/PM特性、スペクトラム特性、温度測定値、電流測定値、電圧測定値または送信電力測定値などのデータ)とは、たとえば、後述のデータ蓄積部16から取得することができる。また、データB11のうち、無線設備の製造データ(製造ロット、部品ロット、製造工場、検査データなど)は、たとえば、後述の製造情報管理サーバー310から取得することができる。また、データ取得部302は、故障が発生した構成要素と、装置の稼働開始から故障が発生するまでの時間とをデータB12(正解データ)として取得する。ここで、製造ロット、部品ロット、製造工場などの製造条件は、一般的に製造結果(たとえば、劣化速度)に影響を与える。なお、故障が発生した構成要素と、装置の稼働開始から故障が発生するまでの時間とを合わせて、故障判定結果とも称する。
図23は、トレーニングデータの取得方法の例を示す図である。図23に例が示されるように、時系列の特性データと測定データとを含むデータB11と、故障が発生した構成要素と装置の稼働開始から故障が発生するまでの時間とを含むデータB12(正解データ)とが、データ蓄積部16に蓄積される。データ取得部302は、データ蓄積部16に蓄積されるデータを取得することができる。
ここで、データB11は、実際の使用環境よりも強いストレスを与えることによって構成要素の劣化を加速させて無線装置101から取得してもよく、また、実際の使用環境で故障に至った無線装置101のデータB11にデータB12の故障判定結果を付加して取得してもよい。また、実機の無線装置101から取得されたデータだけでなく、シミュレーションなどによって各種のばらつきが模擬的に与えられたデータが付け足されてもよい。
モデル生成部304は、データ取得部302から出力されるデータB11とデータB12との組み合わせで作成されるトレーニングデータに基づいて、劣化している構成要素を示すデータC11として、劣化している構成要素の余寿命時間を示すデータC12として学習する。すなわち、無線装置101で測定される時系列の特性データと測定データとを含むデータB11と、故障判定結果を含むデータB12(正解データ)とに基づいて、劣化している構成要素を示すデータC12と、劣化している構成要素の余寿命時間を示すデータC12とを推論する学習済モデルを生成する。たとえば、余寿命時間を示すデータC12は、データB12と装置の稼働時間との差異に基づいて推論することができる。
ここで、トレーニングデータは、データB11、データB12、データC11およびデータC12を互いに関連付けたデータである。
データ取得の対象にしている無線装置101の増幅部107は、経年劣化に起因して故障に至る場合には、ある時点から徐々に特性が劣化し、さらに、あるしきい値を超えると急激に特性の劣化が加速する(すなわち、故障に至る)ことが知られている。これは、増幅部107が無線装置101の中で比較的大きな電力で動作する構成要素であるためである。
特性の変化と構成要素の劣化との間には、図3に示された関係があるので、特性の変化の組み合わせに基づけば、劣化している構成要素を推定することができる。
たとえば、増幅部107の消費電流と、AM/AM特性およびAM/PM特性とが同時に変化する場合、パワートランジスタの劣化の可能性が高いと推定することができる。
各種の特性データ(または測定データ)の間には相関があることは、図3を参照すれば明らかである。よって、より多くのデータを使って各種の特性データ間の相関関係を学習することで、劣化している構成要素を特定する精度を高めることができる。劣化している構成要素を高い精度で特定することができれば、特性の変化に基づいてその余寿命時間を推測する精度が高まることも明白である。
なお、学習装置(または推論装置)は、無線装置101の劣化している構成要素を示すデータC11と、劣化している構成要素の余寿命時間を示すデータC12とを学習するために使用されるが、学習装置(または推論装置)は、たとえば、ネットワークを介して無線装置101に接続される、この無線装置101とは別個の装置であってもよい。または、学習装置(または推論装置)は、無線装置101に内蔵されていてもよい。さらに、学習装置(または推論装置)は、クラウドサーバー上に存在していてもよい。
モデル生成部304は、たとえば、ニューラルネットワークモデルにしたがって、いわゆる教師あり学習によって、データC11とデータC12とを学習する。ここで、教師あり学習とは、入力データと結果(ラベル)データとの組み合わせを学習装置に与えることで、それらのトレーニングデータに存在する特徴を学習し、入力データから結果データを推論する手法をいう。
ニューラルネットワークは、複数のニューロンからなる入力層と、複数のニューロンからなる中間層(隠れ層)と、複数のニューロンからなる出力層とで構成される。中間層は、1層または2層以上であってもよい。
図24は、ニューラルネットワークの例を示す図である。図24に例が示されるような3層のニューラルネットワークであれば、複数の入力データが入力層(X1-X3)に入力されると、当該データに重みW1(w11-w16)が掛けられて中間層(Y1-Y2)に入力され、その結果にさらに重みW2(w21-w26)が掛けられて出力層(Z1-Z3)から出力される。この出力結果は、重みW1の値と重みW2の値とによって変わる。
本実施の形態において、ニューラルネットワークは、データ取得部302によって取得されるデータB11とデータB12(正解データ)との組み合わせで作成されるトレーニングデータにしたがって、いわゆる教師あり学習によって、データC11およびデータC12を学習する。
すなわち、ニューラルネットワークは、入力層に、時系列の特性データと測定データとを含むデータB11を入力して出力層から出力された結果が、故障が発生した構成要素と装置の稼働開始から故障が発生するまでの時間とを含むデータB12(正解データ)に近づくように、重みW1と重みW2とを調整することで学習する。
モデル生成部304は、以上のような機械学習を実行することで学習済モデルを生成し、かつ、学習済みモデルを出力する。
学習済モデル記憶部306は、モデル生成部304から出力された学習済モデルを記憶する。
次に、図25を参照しつつ、学習装置が学習する処理について説明する。図25は、学習装置の学習処理に関するフローチャートである。
まず、ステップST130において、データ取得部302は、時系列の特性データと測定データとを含むデータB11と、故障が発生した構成要素と装置の稼働開始から故障が発生するまでの時間とを含むデータB12(正解データ)とを取得する。
なお、上記ではデータB11とデータB12とを同時に取得するものとされたが、データB11とデータB12とを関連づけて学習装置300へ入力できればよく、データB11とデータB12とがそれぞれ別のタイミングで取得されてもよい。
次に、ステップST131において、モデル生成部304は、データ取得部302によって取得されるデータB11とデータB12との組み合わせで作成されるトレーニングデータにしたがって、いわゆる教師あり学習によって、無線装置101の劣化している構成要素を示すデータC11と、劣化している構成要素の余寿命時間を示すデータC12とを学習し、かつ、学習済モデルを生成する。
次に、ステップST132において、学習済モデル記憶部306は、モデル生成部304によって生成された学習済モデルを記憶する。
<活用フェーズについて>
図26は、無線設備に関する推論装置の構成の例を概念的に示す図である。図26に例が示されるように、推論装置400は、データ取得部302と、推論部308と、通知部312とを備える。
データ取得部302は、無線装置101に関する時系列の各種特性データと、測定データとを含むデータB10を、データ蓄積部16から取得する。
推論部308は、学習済モデル記憶部306に記憶されている学習済モデルを利用して得られる、無線装置101の劣化している構成要素を示すデータC11と、劣化している構成要素の余寿命時間を示すデータC12とを推論する。
すなわち、推論部308は、学習済モデル記憶部306から得られる学習済モデルに、データ取得部302で取得されたデータB10を入力することで、データB10から推論されるデータC11およびデータC12を出力することができる。
なお、本実施の形態では、推論部308が、無線装置101から得られたデータ(さらに、データ蓄積部16に蓄積されたデータ)に基づいて学習された学習済モデルを使って、劣化しているデータC11およびデータC12を出力するものとして説明されたが、図26に示されるように、推論部308が、ネットワークを介して接続される他の無線設備などの外部の機器(たとえば、製造情報管理サーバー310)から取得された各種の製造データに基づいて学習された学習済モデルを使って、データC11およびデータC12を出力するようにしてもよい。
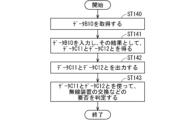
次に、図27を参照しつつ、推論装置がデータC11およびデータC12を得るための処理について説明する。図27は、推論装置の推論処理に関するフローチャートである。
まず、ステップST140において、データ取得部302は、時系列の各種特性データと、測定データとを含むデータB10を取得する。
次に、ステップST141において、推論部308は、学習済モデル記憶部に記憶された学習済モデルにデータB10を入力し、その結果として、無線装置101の劣化している構成要素を示すデータC11と、劣化している構成要素の余寿命時間を示すデータC12とを得る(推論する)。
次に、ステップST142において、通知部312は、ステップST141で得られたデータC11とデータC12とを、無線装置101の保守員または保守管理サーバーに対して出力して通知する。
次に、ステップST143において、無線装置101の保守員または保守管理サーバーは、データC11とデータC12とを使って、無線装置101の交換、または、劣化が特定された構成要素の修理の要否を判定する。
上記の動作によって、無線装置101が故障に至る前または無線装置101が異常動作を起こす前の適切なタイミングで、故障の予兆がある部品または構成要素(すなわち、余寿命時間が短い部品または構成要素)について予防保全を実施することができる。予防保全に際しては、たとえば、修理または交換に必要となる時間よりも十分に長い余寿命時間が確保されるように、それぞれの構成要素の状態が維持されることが望ましい。
これによって、定期的な無線装置101の性能の点検(すなわち、定期点検)の回数を減らすことができ、かつ、通信システム1の信頼性と可用性とを担保するための予備品の数を低減することができる。これらによって、無線装置101を利用する通信システムのランニングコストが低減することができる。
なお、本実施の形態では、モデル生成部304が使う学習アルゴリズムに教師あり学習が適用された場合について説明されたが、学習アルゴリズムはこれに限られるものではない。学習アルゴリズムについては、教師あり学習以外にも、強化学習、教師なし学習または半教師あり学習などを適用することも可能である。
また、モデル生成部304は、複数の無線装置101に対して作成されるトレーニングデータにしたがって、データC11およびデータC12を学習するようにしてもよい。なお、モデル生成部304は、同一のエリアで使用される複数の無線装置101からトレーニングデータを取得してもよいし、異なるエリアで独立して動作する複数の無線装置101から収集されるトレーニングデータを利用してデータC11およびデータC12を学習してもよい。
また、トレーニングデータを収集する無線装置101を学習の途中で追加したり、対象から除去したりすることも可能である。さらに、ある無線装置101に関してデータC11およびデータC12を学習した学習装置300を、これとは別の無線装置101に適用し、当該別の無線装置101に関してデータC11およびデータC12を再学習して更新するようにしてもよい。
また、モデル生成部304に用いられる学習アルゴリズムとしては、特徴量そのものの抽出を学習する、深層学習(Deep Learning)を用いることもでき、他の公知の方法、たとえば、遺伝的プログラミング、機能論理プログラミングまたはサポートベクターマシンなどにしたがって機械学習を実行してもよい。
<以上に記載された実施の形態によって生じる効果について>
次に、以上に記載された実施の形態によって生じる効果の例を示す。なお、以下の説明においては、以上に記載された実施の形態に例が示された具体的な構成に基づいて当該効果が記載されるが、同様の効果が生じる範囲で、本願明細書に例が示される他の具体的な構成と置き換えられてもよい。すなわち、以下では便宜上、対応づけられる具体的な構成のうちのいずれか1つのみが代表して記載される場合があるが、代表して記載された具体的な構成が対応づけられる他の具体的な構成に置き換えられてもよい。
また、当該置き換えは、複数の実施の形態に跨ってなされてもよい。すなわち、異なる実施の形態において例が示されたそれぞれの構成が組み合わされて、同様の効果が生じる場合であってもよい。
以上に記載された実施の形態によれば、劣化判定システムは、増幅部107(または増幅部207)と、判定部32とを備える。増幅部107は、入力される無線信号を増幅させて出力する。判定部32は、増幅部107から出力される無線信号が、増幅部107に入力される対応する無線信号の振幅ごとに定められる振幅のしきい値および位相のしきい値を超える場合に、増幅部107が劣化していると判定する。
このような構成によれば、増幅部107から出力される無線信号の振幅および位相の変化に基づいて増幅部107の劣化を判定することができるため、増幅部107の故障を予測して適切に予防保守を実施することができる。よって、定期的な無線装置101の性能の点検の回数を減らすことができ、かつ、通信システム1の信頼性と可用性とを担保するための予備品の数を低減することができる。これらによって、無線装置101を利用する通信システム1のランニングコストが低減することができる。
なお、上記の構成に本願明細書に例が示された他の構成を適宜追加した場合、すなわち、上記の構成としては言及されなかった本願明細書中の他の構成が適宜追加された場合であっても、同様の効果を生じさせることができる。
また、以上に記載された実施の形態によれば、劣化判定システムは、ソート部24を備える。ソート部24は、増幅部107に入力される無線信号の振幅順に、増幅部107から出力される対応する無線信号の振幅および位相を取得する。そして、ソート部24は、増幅部107に入力される無線信号の振幅とのそれぞれの関係(たとえば、入力振幅対エラー振幅(AM/AM特性)、入力振幅対エラー位相(AM/PM特性))を取得する。このような構成によれば、入力振幅対エラー振幅(AM/AM特性)のテーブルと、入力振幅対エラー位相(AM/PM特性)のテーブルとを生成して、増幅部107の劣化判定に使うことができる。
また、以上に記載された実施の形態によれば、劣化判定システムは、歪補償部104aを備える。歪補償部104aは、増幅部107の歪みを、増幅部107から出力される無線信号をフィードバックする方式で補償する。ここで、増幅部107に入力される無線信号は、歪補償部104aを介して入力される無線信号である。そして、判定部32は、歪補償部104aから出力される無線信号が、歪補償部104aに入力される対応する無線信号の振幅ごとに定められる振幅のしきい値および位相のしきい値を超える場合に、増幅部107が劣化していると判定する。このような構成によれば、歪補償部104aから出力される無線信号の振幅および位相の変化に基づいて増幅部107の劣化を判定することができるため、増幅部107の故障を予測して適切に予防保守を実施することができる。
また、以上に記載された実施の形態によれば、劣化判定システムは、歪補償部を備える。ここで、歪補償部は、たとえば、プレディストーション歪補償部131などに対応するものである。プレディストーション歪補償部131は、増幅部107の歪みをプレディストーション方式で補償する。ここで、増幅部107に入力される無線信号は、プレディストーション歪補償部131を介して入力される無線信号である。また、劣化判定システムは、遅延部141と、入出力比較部139とを備える。遅延部141は、プレディストーション歪補償部131に入力される無線信号を遅延させて、増幅部107から出力される無線信号とのタイミングを揃える。入出力比較部139は、プレディストーション歪補償部131に入力される無線信号と増幅部107から出力される無線信号との差分に基づく差分信号(デジタルエラー複素信号Se)をプレディストーション歪補償部131に出力する。そして、判定部32は、差分信号が、プレディストーション歪補償部131に入力される対応する無線信号の振幅ごとに定められる振幅のしきい値および位相のしきい値を超える場合に、増幅部107が劣化していると判定する。このような構成によれば、入出力比較部139から出力される差分信号の振幅および位相の変化に基づいて増幅部107の劣化を判定することができるため、増幅部107の故障を予測して適切に予防保守を実施することができる。
また、以上に記載された実施の形態によれば、劣化判定システムは、適応動作部140を備える。適応動作部140は、差分信号に基づいてプレディストーション歪補償部131におけるデジタル信号処理のパラメータを適応させる。そして、判定部32は、プレディストーション歪補償部131におけるデジタル信号処理のパラメータに基づいて、増幅部107が劣化していると判定する。このような構成によれば、適応動作部140によって適応されたデジタル信号処理のパラメータに基づいて増幅部107の劣化を判定することができるため、増幅部107の故障を予測して適切に予防保守を実施することができる。
また、以上に記載された実施の形態によれば、劣化判定システムは、振幅および位相測定部113と、温度センサー118とを備える。振幅および位相測定部113は、無線信号の振幅および位相を測定する。温度センサー118は、増幅部107の温度を測定する。そして、増幅部107から出力される無線信号の振幅および位相の測定値を、増幅部107の温度に基づいて分類される。このような構成によれば、無線信号の振幅および位相における温度の影響を抑制することができるため、判定精度を向上させることができる。
また、以上に記載された実施の形態によれば、劣化判定システムは、送信電力測定部120と、電圧測定部115と、電流測定部117とを備える。送信電力測定部120は、増幅部107が出力する無線信号の電力である送信電力を測定する。電圧測定部115は、増幅部107に電力を供給するためのバイアス電圧を測定する。電流測定部117は、増幅部107に電力を供給するための電流である供給電流を測定する。そして、判定部32は、増幅部107が劣化していると判定した場合に、さらに、送信電力および供給電流が変化している伴う場合に、増幅部107におけるパワートランジスタ107aの劣化を特定し、送信電力および供給電流が変化せずに、歪補償部104aに入力される入力信号の振幅に比例して歪補償部104aから出力される歪補償信号(エラー信号)が振幅のしきい値を超える場合に、ローカル発振部106の出力レベル低下を特定し、送信電力および供給電流が変化せずに、歪補償部104aに入力される入力信号の振幅によらず歪補償部104aから出力される歪補償信号(エラー信号)が位相のしきい値を超える場合に、給電部114のリップルの増大またはグラウンドからのノイズ混入を特定する。ここで、ローカル発振部106は、増幅部107に入力される無線信号の周波数変換に使われるローカル信号を発振する。また、給電部114は、増幅部107にバイアス電圧を供給する。このような構成によれば、送信電力とバイアス電圧と供給電流とに基づいて劣化している構成要素を特定することができるため、修理または交換が必要となる構成要素を絞り込み、効率的な保守を実施することができる。
また、以上に記載された実施の形態によれば、劣化判定システムは、データ生成部102を備える。データ生成部102は、増幅部107の特性を測定するための試験信号を生成する。そして、データ生成部102は、通信不要なタイミングでユーザーデータから試験信号に切り替えて、増幅部107に無線信号を入力する。このような構成によれば、試験信号を用いることで、AM/AM測定およびAM/PM測定が容易になる。さらに、周波数特性の測定も容易になる。
また、以上に記載された実施の形態によれば、試験信号は、振幅が最小値から最大値に直線的に、かつ、周期的に変化する三角波、または、それをさらに遅い周期で周波数切り替えすることで生成される信号である。このような構成によれば、試験信号を用いることで、AM/AM測定およびAM/PM測定が容易になる。さらに、周波数特性の測定も容易になる。
また、以上に記載された実施の形態によれば、データ生成部102は、無線通信規格で定められた通信不要なタイミングでユーザーデータから試験信号に切り替えて、増幅部107に無線信号を入力する。このような構成によれば、無線通信規格に準拠しつつ試験信号を用いることで、AM/AM測定およびAM/PM測定が容易になる。さらに、周波数特性の測定も容易になる。
また、以上に記載された実施の形態によれば、劣化判定システムは、増幅部107と、アナログ-デジタル変換部138(または、アナログ-デジタル変換部201)と、FFT部203と、スペクトラム解析部204と、判定部26とを備える。増幅部107は、入力される無線信号を増幅させて出力する。アナログ-デジタル変換部138は、増幅部107から出力される無線信号を、アナログ-デジタル変換する。FFT部203は、アナログ-デジタル変換部138によってアナログ-デジタル変換された無線信号を高速フーリエ変換処理する。スペクトラム解析部204は、FFT部203によって高速フーリエ変換処理された無線信号のスペクトラム特性を解析する。判定部26は、スペクトラム特性が、増幅部107に入力される対応する無線信号の周波数ごとに定められるしきい値を超える場合に、増幅部107が劣化していると判定する。
このような構成によれば、増幅部107から出力される無線信号から得られるスペクトラム特性に基づいて増幅部107の劣化を判定することができるため、増幅部107の故障を予測して適切に予防保守を実施することができる。よって、定期的な無線装置101の性能の点検の回数を減らすことができ、かつ、通信システム1の信頼性と可用性とを担保するための予備品の数を低減することができる。これらによって、無線装置101を利用する通信システム1のランニングコストが低減することができる。
また、以上に記載された実施の形態によれば、劣化判定システムは、歪補償部を備える。ここで、歪補償部は、たとえば、歪補償および直交変調部104などに対応するものである。歪補償および直交変調部104は、増幅部107の歪みを、増幅部107から出力される無線信号をフィードバックする方式で補償する。ここで、増幅部107に入力される無線信号は、歪補償および直交変調部104を介して入力される無線信号である。そして、アナログ-デジタル変換部201は、歪補償および直交変調部104から出力される無線信号をアナログ-デジタル変換する。このような構成によれば、歪補償および直交変調部104から出力される無線信号から得られるスペクトラム特性に基づいて増幅部107の劣化を判定することができるため、増幅部107の故障を予測して適切に予防保守を実施することができる。
また、以上に記載された実施の形態によれば、劣化判定システムは、プレディストーション歪補償部131を備える。プレディストーション歪補償部131は、増幅部107の歪みをプレディストーション方式で補償する。ここで、増幅部107に入力される無線信号は、プレディストーション歪補償部131を介して入力される無線信号である。また、劣化判定システムは、遅延部141と、入出力比較部139とを備える。遅延部141は、プレディストーション歪補償部131に入力される無線信号を遅延させて、増幅部107から出力される無線信号とのタイミングを揃える。入出力比較部139は、プレディストーション歪補償部131に入力される無線信号と増幅部107から出力される無線信号との差分に基づく差分信号をプレディストーション歪補償部131に出力する。そして、FFT部203は、差分信号を高速フーリエ変換処理する。また、スペクトラム解析部204は、FFT部203によって高速フーリエ変換処理された差分信号のスペクトラム特性を解析する。このような構成によれば、入出力比較部139から出力される差分信号から得られるスペクトラム特性に基づいて増幅部107の劣化を判定することができるため、増幅部107の故障を予測して適切に予防保守を実施することができる。
また、以上に記載された実施の形態によれば、劣化判定システムは、振幅および位相測定部113と、温度センサー118とを備える。振幅および位相測定部113は、無線信号の振幅および位相を測定する。温度センサー118は、増幅部107の温度を測定する。そして、増幅部107から出力される無線信号の振幅および位相の測定値は、増幅部107の温度に基づいて分類される。このような構成によれば、無線信号の振幅および位相における温度の影響を抑制することができるため、判定精度を向上させることができる。
また、以上に記載された実施の形態によれば、劣化判定システムは、送信電力測定部120と、電圧測定部115と、電流測定部117とを備える。送信電力測定部120は、増幅部107が出力する無線信号の電力である送信電力を測定する。電圧測定部115は、増幅部107に電力を供給するためのバイアス電圧を測定する。電流測定部117は、増幅部107に電力を供給するための電流である供給電流を測定する。そして、判定部26は、増幅部107が劣化していると判定した場合に、さらに、送信電力および供給電流が変化している伴う場合に、パワートランジスタの劣化を特定し、送信電力および供給電流が変化せずに、隣接チャネル領域の電力全体が大きくなる場合に、ローカル発振部106の出力レベル低下を特定し、送信電力および供給電流が変化せずに、特定の周波数の不要発射成分が大きい場合に、給電部114のリップルの増大またはグラウンドからのノイズ混入を特定する。ここで、ローカル発振部106は、増幅部107に入力される無線信号の周波数変換に使われるローカル信号を発振する。また、給電部114は、増幅部107にバイアス電圧を供給する。このような構成によれば、送信電力とバイアス電圧と供給電流とに基づいて劣化している構成要素を特定することができるため、修理または交換が必要となる構成要素を絞り込み、効率的な保守を実施することができる。
また、以上に記載された実施の形態によれば、劣化判定システムは、データ生成部102を備える。データ生成部102は、増幅部107の特性を測定するための試験信号を生成する。そして、データ生成部102は、通信不要なタイミングでユーザーデータから試験信号に切り替えて、増幅部107に無線信号を入力する。このような構成によれば、試験信号を用いることで、AM/AM測定およびAM/PM測定が容易になる。さらに、周波数特性の測定も容易になる。
また、以上に記載された実施の形態によれば、試験信号は、正弦波または任意の周波数離調された2つの正弦波が合成された信号、または、それらをさらに遅い周期で周波数切り替えすることで生成される信号である。このような構成によれば、増幅部107のスペクトラム特性からスプリアス成分または3次歪を容易に抽出することができる。
また、以上に記載された実施の形態によれば、データ生成部102は、無線通信規格で定められた通信不要なタイミングでユーザーデータから試験信号に切り替えて、増幅部107に無線信号を入力する。このような構成によれば、無線通信規格に準拠しつつ試験信号を用いることで、AM/AM測定およびAM/PM測定が容易になる。さらに、周波数特性の測定も容易になる。
また、以上に記載された実施の形態によれば、学習装置は、データ蓄積部16と、製造情報管理サーバー310と、モデル生成部304とを備える。データ蓄積部16は、上記のうちのいずれかの劣化判定システムに備えられる増幅部107から一定周期ごとに得られる、少なくとも、振幅/振幅特性、および、振幅/位相特性(さらには、スペクトラム特性、温度、チャネル周波数、送信電力測定値、バイアス電圧測定値および電流測定値を含めてもよい)を、時系列のデータとして蓄積する。製造情報管理サーバー310は、無線設備の製造ロット、部品ロット、製造工場および検査データを、製造データとして記憶する。モデル生成部304は、データ蓄積部16に蓄積されている時系列のデータと、製造データと、故障が発生した構成要素を示すデータと、故障が発生するまでの時間を示すデータとに基づいて、劣化している構成要素と、劣化している構成要素の余寿命時間とを推論する学習済みモデルを生成する。このような構成によれば、データ蓄積部16に蓄積されている時系列のデータと、製造データと、故障判定結果とに基づいて判定方法を学習することによって、判定(推論)の精度を向上させることができる。
以上に記載された実施の形態によれば、学習装置は、データ蓄積部16と、製造情報管理サーバー310と、モデル生成部304とを備える。データ蓄積部16は、無線設備に備えられる増幅部107から一定周期ごとに得られる、少なくとも、振幅/振幅特性、および、振幅/位相特性(さらには、スペクトラム特性、温度、チャネル周波数、送信電力測定値、バイアス電圧測定値および電流測定値を含めてもよい)を、時系列のデータとして蓄積する。製造情報管理サーバー310は、無線設備の製造ロット、部品ロット、製造工場および検査データを、製造データとして記憶する。モデル生成部304は、データ蓄積部16に蓄積されている時系列のデータと、製造データと、故障が発生した構成要素を示すデータと、故障が発生するまでの時間を示すデータとに基づいて、劣化している構成要素と、劣化している構成要素の余寿命時間とを推論する学習済みモデルを生成する。
このような構成によれば、データ蓄積部16に蓄積されている時系列のデータと、製造データと、故障判定結果とに基づいて判定方法を学習することによって、判定(推論)の精度を向上させることができる。
なお、上記の構成に本願明細書に例が示された他の構成を適宜追加した場合、すなわち、上記の構成としては言及されなかった本願明細書中の他の構成が適宜追加された場合であっても、同様の効果を生じさせることができる。
また、以上に記載された実施の形態によれば、推論装置は、推論部308と、通知部312とを備える。推論部308は、上記のうちのいずれかの学習装置において生成された学習済みモデルにデータ蓄積部16に蓄積されている時系列のデータを入力して、劣化している構成要素と、余寿命時間とを推論する。通知部312は、推論された劣化している構成要素と、余寿命時間とに基づいて通知を行う。このような構成によれば、学習済モデルを使って劣化している構成要素とその余寿命時間とを得ることによって、高い精度で増幅部107の故障を予測して、適切に予防保守を実施することができる。
<以上に記載された実施の形態の変形例について>
以上に記載された実施の形態では、それぞれの構成要素の寸法、形状、相対的配置関係または実施の条件などについても記載する場合があるが、これらはすべての局面においてひとつの例であって、限定的なものではないものとする。
したがって、例が示されていない無数の変形例、および、均等物が、本願明細書に開示される技術の範囲内において想定される。たとえば、少なくとも1つの構成要素を変形する場合、追加する場合または省略する場合、さらには、少なくとも1つの実施の形態における少なくとも1つの構成要素を抽出し、他の実施の形態における構成要素と組み合わせる場合が含まれるものとする。
また、矛盾が生じない限り、以上に記載された実施の形態において「1つ」の構成要素が備えられる、と記載された場合に、当該構成要素が「1つ以上」備えられていてもよいものとする。
さらに、以上に記載された実施の形態におけるそれぞれの構成要素は概念的な単位であって、本願明細書に開示される技術の範囲内には、1つの構成要素が複数の構造物から成る場合と、1つの構成要素がある構造物の一部に対応する場合と、さらには、複数の構成要素が1つの構造物に備えられる場合とを含むものとする。
また、以上に記載された実施の形態におけるそれぞれの構成要素には、同一の機能を発揮する限り、他の構造または形状を有する構造物が含まれるものとする。
また、本願明細書における説明は、本技術に関連するすべての目的のために参照され、いずれも、従来技術であると認めるものではない。