以下、実施の形態にかかる作業計画変更装置、作業計画変更システム、記憶装置、管理装置および作業計画変更プログラムを図面に基づいて詳細に説明する。
実施の形態1.
図1は、実施の形態1にかかる作業計画変更システム10の構成図の一例である。作業計画変更システム10は、空港での作業員の作業計画を変更するシステムである。
作業計画変更システム10は、作業計画変更装置11と記憶装置12と管理装置13とを備える。作業計画変更装置11と記憶装置12と管理装置13とは、ネットワークに接続されている。作業計画変更装置11と記憶装置12と管理装置13とは、ネットワークを介して互いに情報の送受信を行う。実施の形態1において、ネットワークは例えばインターネットなどのWAN(Wide Area Network)であるが、LAN(Local Area Network)であってもよい。
作業計画変更装置11は、空港での作業員の作業計画を変更する装置である。作業計画変更装置11は、例えば空港のターンアラウンド業務を運営する事業者により運用される。作業計画変更装置11は、駐機スケジュール入力部21と、移動情報記憶部22と、作業員情報記憶部23と、必要資格情報記憶部24と、作業計画立案部25と、作業進捗情報入力部26と、測位情報入力部27と、作業計画入力部28とを備える。
駐機スケジュール入力部21は、記憶装置12の駐機スケジュール出力部42から、複数の駐機場における航空機の駐機時刻を含む駐機スケジュールを入力する。駐機時刻は、駐機開始時刻および駐機終了時刻のうち少なくとも1つを含む。
移動情報記憶部22は、移動情報を記憶する。移動情報は、複数の駐機場の1つから他の駐機場までにおける作業員の移動に関する情報である。移動情報は、駐機場間の移動に要する時間の情報、または駐機場間の距離の情報である。
作業員情報記憶部23は、作業員の資格などに関する情報である作業員情報を記憶する。
必要資格情報記憶部24は、駐機場での作業とその作業で必要となる資格とを対応させた情報である必要資格情報を記憶する。
作業計画立案部25は、駐機スケジュール入力部21からの駐機スケジュールと、移動情報記憶部22からの移動情報と、作業員情報記憶部23からの作業員情報と、必要資格情報記憶部24からの必要資格情報とに基づいて、空港での作業を実施する作業員の作業計画を立案する。例えば作業計画が1日単位の場合、作業計画立案部25はその日の作業開始前に作業計画を立案する。図1に示す例では、作業計画立案部25は、作業計画変更装置11に含まれるが、作業計画変更装置11に含まれなくてもよい。この場合、作業を取りまとめるオペレータが手動で予め立案した作業計画が、作業計画変更装置11へ入力される。
作業進捗情報入力部26は、管理装置13の作業進捗情報出力部53から、空港での作業の進捗を示す作業進捗情報を入力する。
測位情報入力部27は、管理装置13の測位情報出力部55から、作業員および設備の位置情報である測位情報を入力する。測位情報は、作業員の位置情報を少なくとも含んでいればよい。
作業計画入力部28は、管理装置13の作業計画出力部57から、最新の作業計画を入力する。作業計画変更部31による作業計画の変更が1回目の場合には、最新の作業計画は作業計画立案部25によって立案された計画である。また、作業計画変更部31による作業計画の変更が2回目以降の場合には、最新の作業計画は1つ前に作業計画変更部31によって変更された計画である。すなわち最新の作業計画は、後に説明する管理装置13の作業計画管理部56が管理する計画であり、現時点で作業員の作業計画として運用している計画である。
また、作業計画変更装置11は、算出部29と、推定部30と、作業計画変更部31と、作業計画出力部32とを備える。
算出部29は、作業進捗情報入力部26からの作業進捗情報に基づいて、作業の遅延時間を算出する。算出部29は、航空機の到着遅れによる作業の遅延時間、あるいは作業そのものの遅延による遅延時間を算出する。算出部29は、遅延時間に対し後に説明する駐機スケジュールIDおよび遅延要因を付加したものを算出結果として出力する。算出結果については、後に図9を用いて詳細に説明する。遅延時間は、作業開始予定時刻と作業開始時刻との差である。また、遅延時間は、作業終了予定時刻と作業終了時刻との差であってもよいし、作業終了予定時刻とエアラインに求められている作業終了時刻との差であってもよい。
推定部30は、算出部29からの算出結果のうち少なくとも遅延時間と、駐機スケジュール入力部21からの駐機スケジュールとに基づいて、作業の遅延の影響を受ける駐機スケジュールを特定する情報を推定して推定情報とする。推定部30は、算出部29からの遅延時間がゼロの場合には、遅延の影響を受ける駐機スケジュールを特定する情報を推定しなくてもよい。推定部30は、算出部29からの遅延時間と、駐機スケジュール入力部21からの駐機スケジュールと、移動情報記憶部22からの移動情報と、作業進捗情報入力部26からの作業進捗情報と、測位情報入力部27からの測位情報とに基づいて、作業計画入力部28からの作業計画において、遅延の影響を受ける駐機スケジュールを特定する情報を推定する。ここで、駐機スケジュールを特定する情報とは、駐機スケジュールと1対1対応する情報であり、一例として駐機スケジュールの識別子である。そして、駐機スケジュールの識別子は、後に説明する駐機スケジュールIDに相当する。
推定部30は、算出部29が算出した遅延時間のみに基づいて、遅延の影響を受ける駐機スケジュールを特定する情報を推定してもよい。また、推定部30は、算出部29が算出した遅延時間だけでなく別の情報に基づいて、遅延の影響を受ける駐機スケジュールを特定する情報を推定してもよい。別の情報とは、例えば最新の作業計画における作業員のスケジュールである。作業員の作業に遅延が発生しているとしても、当該作業員がその後に別の作業を行う予定が無ければ、遅延の影響を受けるとは限らない。遅延時間だけでなく別の情報も使用することで、推定部30は遅延の影響を受ける駐機スケジュールを特定する情報を精度よく推定することができる。
作業計画変更部31は、推定部30からの推定情報に基づいて、作業計画入力部28からの作業計画を変更する。作業計画変更部31は、推定部30からの推定情報と、駐機スケジュール入力部21からの駐機スケジュールと、移動情報記憶部22からの移動情報と、作業員情報記憶部23からの作業員情報と、必要資格情報記憶部24からの必要資格情報と、測位情報入力部27からの測位情報とに基づいて、作業計画入力部28からの作業計画を変更してもよい。
作業計画変更部31は、遅延の影響を受ける作業に対し、空港での作業を実施する作業員の作業計画を変更する。遅延の影響を受ける作業とは、遅延の影響を受ける駐機スケジュールを特定する情報に紐づく作業のことである。なお、作業計画変更部31は、予め定められた制約条件に基づいて、作業計画を変更する。制約条件は例えば、作業計画立案部25によって立案された作業計画からの変更量を所定量以下とする、作業計画入力部28からの最新の作業計画からの変更量を所定量以下とする、作業に割り当てる予備の作業員数を所定値以下とする、全作業員の残業時間の偏りを低減するために残業時間の最大値を所定時間以下とする、および担当する駐機場間の移動時間を所定時間以下とする、などが挙げられる。
作業計画出力部32は、管理装置13の作業計画入力部51に対し、作業計画立案部25からの作業計画、あるいは作業計画変更部31からの作業計画を出力する。具体的には、作業計画変更部31が作業計画の変更を行っていない場合には、作業計画出力部32は、作業計画立案部25によって立案された作業計画を出力する。作業計画変更部31が作業計画の変更を行った場合には、作業計画出力部32は、作業計画変更部31によって変更された作業計画を出力する。
記憶装置12は、作業計画変更装置11による空港での作業員の作業計画の変更で使用される情報を記憶する装置である。記憶装置12は、例えば航空機による運送を行う事業者により運用される。記憶装置12は、駐機スケジュール記憶部41と、駐機スケジュール出力部42とを備える。
駐機スケジュール記憶部41は、駐機スケジュールを記憶する。駐機スケジュールは、作業計画立案部25が行う立案、推定部30が行う推定、および作業計画変更部31が行う変更で使用される情報である。具体的には、駐機スケジュールは、作業計画の立案、遅延時間の算出、遅延影響を受ける駐機スケジュールを特定する情報の推定、および作業計画の変更で使用される情報である。
駐機スケジュール出力部42は、作業計画変更装置11の駐機スケジュール入力部21に対し、駐機スケジュール記憶部41からの駐機スケジュールを出力する。
管理装置13は、作業計画変更装置11による空港での作業員の作業計画の変更で使用される情報を管理する装置である。管理装置13は、例えば空港のターンアラウンド業務を運営する事業者により運用される。管理装置13は、作業計画入力部51と、作業進捗情報管理部52と、作業進捗情報出力部53と、測位情報管理部54と、測位情報出力部55と、作業計画管理部56と、作業計画出力部57とを備える。
作業計画入力部51は、作業計画変更装置11の作業計画出力部32から、作業計画を入力する。
作業進捗情報管理部52は、作業進捗情報を管理する。作業進捗情報は、算出部29が行う算出、および推定部30が行う推定で使用される情報である。具体的には、作業進捗情報は、遅延時間の算出、および作業の遅延の影響を受ける駐機スケジュールを特定する情報の推定で使用される情報である。
作業進捗情報出力部53は、作業計画変更装置11の作業進捗情報入力部26に対し、作業進捗情報管理部52からの作業進捗情報を出力する。
測位情報管理部54は、測位情報を管理する。測位情報は、推定部30が行う推定、および作業計画変更部31が行う変更で使用される情報である。具体的には、測位情報は、影響を受ける駐機スケジュールを特定する情報の推定、および作業計画の変更で使用される情報である。
測位情報出力部55は、作業計画変更装置11の測位情報入力部27に対し、測位情報管理部54からの測位情報を出力する。
作業計画管理部56は、作業計画入力部51からの作業計画を管理する。
作業計画出力部57は、作業計画変更装置11の作業計画入力部28に対し、作業計画管理部56からの作業計画を出力する。
次に、図2から図10を用いて、実施の形態1にかかる各種情報および作業計画の詳細について説明する。図2は、実施の形態1にかかる記憶装置12の駐機スケジュール記憶部41が記憶する駐機スケジュールの一例である。駐機スケジュールには、駐機スケジュールIDと、機体番号と、機種と、作業種別と、駐機場番号と、到着時の便名と、駐機開始時刻と、駐機終了時刻と、出発時の便名と、更新時刻とが含まれる。
駐機スケジュールIDは、駐機スケジュールの識別子である。機体番号は、駐機する航空機を一意に示す番号である。機種は、駐機する航空機の種類である。作業種別は、駐機中の航空機に対して設定される作業IDである。駐機場番号は、航空機が駐機する場所を示す番号である。到着時の便名は、空港に到着して駐機を開始する時の便名である。駐機開始時刻は、航空機が到着して駐機場で停止する時刻である。駐機終了時刻は、航空機が離陸に向けて駐機場を離れるために、再び移動を開始する時刻である。出発時の便名は、駐機を終了して空港を出発する時の便名である。更新時刻は、航空機の運航状況によって、駐機スケジュール記憶部41が駐機スケジュールを更新した時点の時刻である。
図2に示す例では、駐機スケジュールID「00001」に対応する駐機場番号「1」の駐機場は、「第1駐機場」を表す。また、駐機スケジュールID「00002」に対応する駐機場番号「2」の駐機場は、「第2駐機場」を表す。
駐機スケジュールIDに対応する作業種別は、駐機スケジュールID「00001」のように1つの場合もあれば、駐機スケジュールID「00002」のように複数の場合もある。
図3は、実施の形態1にかかる作業計画変更装置11の移動情報記憶部22が記憶する移動情報の一例である。移動情報には、複数の駐機場について、1つの駐機場と他の各駐機場との間における作業員の移動に要する移動時間の情報が含まれる。また、図3に示す例では、駐機場と荷捌き場との間における移動に要する移動時間の情報、および1つの荷捌き場と他の荷捌き場との間における移動に要する移動時間の情報も含まれる。
移動時間とは、例えば移動元の地点である駐機場または荷捌き場から、移動先の地点である駐機場または荷捌き場へ、作業員が徒歩あるいは車などで移動するのにかかる標準的な時間とする。作業員が移動先で設備を用いて作業を行う場合には、移動時間は作業員が当該設備を用いて移動するのにかかる標準的な時間であってもよい。この場合、移動速度が設備毎に異なる場合を考慮し、移動情報記憶部22には、複数の設備の各々についての移動情報が記憶されてもよい。移動情報は、移動時間の情報に限られず、移動元の地点である駐機場または荷捌き場から、移動先の地点である駐機場または荷捌き場までの距離である移動距離の情報であってもよい。この場合、移動距離は移動速度に対し移動時間で乗算することで算出される。
図4は、実施の形態1にかかる作業計画変更装置11の作業員情報記憶部23が記憶する作業員情報の一例である。作業員情報には、作業員IDと、各資格を保有しているか否かの情報とが含まれる。
作業員IDは、作業員を一意に示す識別子である。各資格を保有しているか否かの情報は、「T」と「F」とで表される。「T」は資格を保有していることを意味し、「F」は資格を保有していないことを意味する。図4に示す例では、作業員ID「a0010」の作業員は、資格1を保有しており、資格2を保有していない。ここで資格とは、地上作業を構成する種々の付随作業を行えるかどうかを示すものである。
図5は、実施の形態1にかかる作業計画変更装置11の必要資格情報記憶部24が記憶する必要資格情報の一例である。必要資格情報には、作業種別と、各資格を必要とするか否かの情報とが含まれる。すなわち必要資格情報は、駐機中の航空機に対して設定される作業種別に関して、どの資格が必要になるかを示す情報である。
各資格を必要とするか否かの情報は、「T」と「F」とで表される。「T」は資格を必要とすることを意味し、「F」は資格を必要としないことを意味する。図5に示す例では、作業種別「OP001」の作業は、資格1を必要とし、資格2を必要としない。よって、少なくとも資格1を保有する作業員が、作業種別「OP001」の作業を実施できる。また、少なくとも資格1と資格2とを保有する作業員は、作業種別「OP002」の作業を単独で実施できる。これに限定されず、例えば資格1のみを保有する作業員と、資格2のみを保有する作業員とが共同で、作業種別「OP002」の作業を実施できるとしてもよい。
図6は、実施の形態1にかかる作業計画変更装置11の作業計画立案部25が立案する作業計画の一例である。図6は、ある1日についての作業計画の例である。作業計画には、作業員IDと、作業開始時刻と、作業終了時刻と、作業種別と、資格と、作業場所(起点)と、作業場所(終点)と、駐機スケジュールIDとが含まれる。
作業開始時刻は、作業員IDに対応する作業員が作業を開始すべき時刻である。作業終了時刻は、作業員IDに対応する作業員が作業を終了すべき時刻である。資格は、作業で必要となる資格である。資格「N/A」は、該当する作業で資格が不要であることを意味する。ここで作業種別と資格とは1対1に対応しない。図6に示す例では、作業種別「OP042」の作業は資格20を必要とするが、例えば資格21も必要となる。
作業場所(起点)は、作業種別に対応する作業を行う場所である。あるいは作業場所(起点)は、作業種別に対応する作業で移動を伴う場合に、起点となる場所である。作業場所(終点)は、作業種別に対応する作業で、移動を伴う場合には終点となる場所である。作業場所(終点)「N/A」は、作業種別に対応する作業で、移動を伴わないことを意味する。駐機スケジュールIDは、駐機スケジュールのIDである。駐機スケジュールID「N/A」は、特定の駐機場での作業に依存しないことを意味する。図6に示す例では、作業員ID「a0020」に対応する作業員は、駐機場間の移動のみを行い、特定の駐機場で作業を行わない。
図6に示す例では、作業員ID「a0010」に対応する作業員は、駐機スケジュールID「00039」の駐機スケジュールに基づいて、10時40分から10時50分までの間、第6駐機場にて搭降載の作業を行う。作業員ID「a0011」に対応する作業員は、駐機スケジュールID「00015」の駐機スケジュールに基づいて、11時00分から11時10分までの間、第3駐機場から第8荷捌き場へ荷物を搬送する。作業員ID「a0020」に対応する作業員は、12時10分から12時25分までの間、第5駐機場から第2駐機場へ移動する。
図7は、実施の形態1にかかる管理装置13の作業進捗情報管理部52が管理する作業進捗情報の一例である。作業進捗情報には、駐機スケジュールIDと、作業開始予定時刻と、作業開始時刻と、作業終了予定時刻と、作業終了時刻と、エアラインに求められている作業終了時刻と、更新時刻とが含まれる。
作業開始予定時刻は、駐機スケジュールIDに対応する駐機スケジュールに基づく作業が開始される予定の時刻である。作業開始時刻は、実際に作業が開始された時刻である。作業終了予定時刻は、駐機スケジュールIDに対応する駐機スケジュールに基づく作業が終了する予定の時刻である。なお、作業開始予定時刻に対し作業開始時刻が変わった場合には、作業終了予定時刻は、作業開始予定時刻と作業開始時刻との変更量に基づいて変更される。図7に示す例では、駐機スケジュールID「00002」に対応する駐機スケジュールに基づく作業の作業開始予定時刻が14時00分に対し、作業開始時刻が14時10分である。この場合、予定より10分遅れで作業が開始されたことになる。その結果、作業終了予定時刻が14時50分に変更されている。仮に、作業開始時刻が予定通り14時00分であった場合には、作業終了予定時刻は14時40分である。
作業終了時刻は、実施に作業が終了した時刻である。作業が終了していない場合には、作業終了時刻は空欄となる。エアラインに求められている作業終了時刻は、該当する航空機が再び出発するために、守らなければならない作業終了時刻である。更新時刻は、作業進捗状況に応じて作業進捗情報管理部52が作業進捗情報を更新した時点の時刻である。
図8は、実施の形態1にかかる管理装置13の測位情報管理部54が管理する測位情報の一例である。測位情報には、作業員IDまたは設備IDと、位置(最も近い作業場所)と、更新時刻とが含まれる。
設備IDは、空港での地上作業で使用される複数の設備の各々に付された識別子である。位置(最も近い作業場所)は、作業員IDに対応する作業員の位置または最も近い作業場所である。位置(最も近い作業場所)は、設備IDに対応する設備の位置または最も近い作業場所であってもよい。位置(最も近い作業場所)は、図示しないGPS(Global Positioning System)によって検出されてもよいし、所定の場所に取り付けられた図示しないカメラなどによって検出されてもよい。検出方法はこれらに限定されない。更新時刻は、測位情報管理部54が作業員または設備の位置を更新した時点の時刻である。
図9は、実施の形態1にかかる作業計画変更装置11の算出部29による算出結果、および作業計画変更装置11の推定部30が推定する推定情報の一例である。算出結果には、駐機スケジュールIDと、遅延要因と、遅延時間とが含まれる。推定情報には、遅延の影響を受ける駐機スケジュールの駐機スケジュールIDが含まれる。
遅延要因は、作業の遅延が発生した要因である。遅延時間は、遅延要因に対応する遅延時間である。遅延の影響を受ける駐機スケジュールの駐機スケジュールIDは、遅延の影響を受ける駐機スケジュールの識別子である。遅延の影響を受ける駐機スケジュールの駐機スケジュールID「N/A」は、遅延の影響を受ける駐機スケジュールの駐機スケジュールIDが存在しないことを意味する。
図9に示す例では、駐機スケジュールID「00042」に対応する作業は、作業開始時間が20分遅延している。これにより、推定部30は、駐機スケジュールID「00042」および「00051」が遅延の影響を受けると推定する。具体的には、推定部30は、駐機スケジュールID「00042」および「00051」に対応する作業が遅延の影響を受けると推定する。ここで、駐機スケジュールID「00042」が遅延の影響を受けると推定される理由は、例えば駐機スケジュールID「00042」に対応する作業が複数あり、そのうちの1つの作業の開始時間が遅延したことで、残りの作業にも影響が及ぶためである。また、駐機スケジュールID「00051」が遅延の影響を受けると推定される理由は、例えば駐機スケジュールID「00042」に対応する作業を行う作業員が、駐機スケジュールID「00051」に対応する作業を引き続き行う場合に、駐機スケジュールID「00051」に対応する作業の開始時間も遅延するためである。
また、駐機スケジュールID「00008」に対応する作業は、作業終了時刻が15分遅延している。これにより、推定部30は、駐機スケジュールID「00055」が遅延の影響を受けると推定する。駐機スケジュールID「00055」が遅延の影響を受けると推定される理由は、例えば駐機スケジュールID「00008」に対応する作業の後に駐機スケジュールID「00055」に対応する作業が同じ駐機場で行われるためである。
また、駐機スケジュールID「00039」に対応する作業は、作業開始時刻が5分遅延している。これにより、推定部30は、駐機スケジュールID「00039」が遅延の影響を受けると推定する。
また、駐機スケジュールID「00045」に対応する作業は、作業終了時刻が2分遅延している。但し、推定部30は遅延の影響を受ける駐機スケジュールIDが存在しないと推定する。
図10は、実施の形態1にかかる作業計画変更装置11の作業計画変更部31が変更した後の作業計画の一例である。図6と同様、作業計画には、作業員IDと、作業開始時刻と、作業終了時刻と、作業種別と、資格と、作業場所(起点)と、作業場所(終点)と、駐機スケジュールIDとが含まれる。
図10に示す例では、作業員ID「a0010」に対応する作業員の作業開始時刻が10時40分から10時45分に変更されている点、および作業員ID「a0032」に対応する作業員の作業計画が追加されている点で、図6とは異なる。これは、図7に示す作業進捗情報で、駐機スケジュールID「00039」に対応する作業の開始時刻が5分遅れたことが要因である。これにより、図9に示すように、推定部30は駐機スケジュールID「00039」を推定情報として推定する。
図10に示す例では、作業員ID「a0010」に対応する作業員に加え、作業員ID「a0032」に対応する作業員が、駐機スケジュールID「00039」の作業種別「OP032」に対応する作業を行うことで、作業開始の遅延を挽回するよう作業計画が変更される。なお、駐機スケジュールID「00039」の作業種別「OP032」に対応する作業は、資格1の保有を必要とし、予め本作業に割り当てられていた作業員ID「a0010」に対応する作業員は、図6に示すように資格1を保有する。よって、新たに追加された作業員ID「a0032」に対応する作業員は、必ずしも資格1を保有する必要はない。作業種別「OP032」に対応する作業を行う追加要員である作業員は、搭降載の作業場所(起点)である第6駐機場との距離が近いことが望ましい。距離が近いかどうかは、測位情報入力部27からの測位情報により把握することができる。なお、追加要因である作業員の位置は、測位情報だけでなく最新の作業計画の作業場所(起点)あるいは作業場所(終点)から推測することもできる。
上記では、駐機スケジュールID「00039」の作業種別「OP032」についての作業計画を変更しているが、駐機スケジュールID「00039」に対応する作業が他にもある場合、作業員ID「a0032」に対応する作業員が作業種別「OP032」に対応する作業以外の作業を行うよう作業計画を変更してもよい。
また、作業員ID「a0032」に対応する作業員だけでなく他の作業員も、駐機スケジュールID「00039」の作業種別「OP032」に対応する作業を行うよう作業計画を変更してもよい。その際、搭降載の作業場所(起点)である第6駐機場との距離が近い作業員が望ましい。更に、作業員ID「a0032」が設備を運転して第6駐機場へ向かう場合、第6駐機場へ向かう途中でその設備に搭乗可能な作業員が望ましい。
次に、作業計画変更システム10の動作について説明する。図11は、実施の形態1にかかる作業計画変更システム10の動作手順の一例を示すフローチャートである。以下に説明する動作手順の前提として、駐機スケジュール記憶部41には、駐機スケジュールが記憶されている。移動情報記憶部22には、移動情報が記憶されている。作業員情報記憶部23には、作業員情報が記憶されている。必要資格情報記憶部24には、必要資格情報が記憶されている。作業進捗情報管理部52には、作業進捗情報が管理されている。測位情報管理部54には、測位情報が管理されている。作業計画管理部56には、予め立案あるいは変更された最新の作業計画が管理されている。
ステップST1において、記憶装置12の駐機スケジュール出力部42は、図2に示す駐機スケジュールが更新されているか否かを判定する。具体的には、駐機スケジュール出力部42は、駐機スケジュールのうち更新時刻に基づいて、駐機スケジュールが更新されているか否かを判定する。また、管理装置13の作業進捗情報出力部53は、図7に示す作業進捗情報が更新されているか否かを判定する。具体的には、作業進捗情報出力部53は、作業進捗情報のうち更新時刻に基づいて、作業進捗情報が更新されているか否かを判定する。ステップST1の判定がYesの場合、すなわち駐機スケジュール出力部42が行う判定または作業進捗情報出力部53が行う判定のうち少なくとも1つの判定がYesの場合には、処理はステップST2へ進む。ステップST1の判定がNoの場合、すなわち駐機スケジュール出力部42が行う判定および作業進捗情報出力部53が行う判定のいずれもNoの場合には、作業計画変更装置11はステップST1の処理を再度行う。
ステップST2において、駐機スケジュールが更新されていると判定された場合には、作業計画変更装置11の駐機スケジュール入力部21は、更新された駐機スケジュールを記憶装置12の駐機スケジュール出力部42から受信する。作業進捗情報が更新されていると判定された場合には、作業計画変更装置11の作業進捗情報入力部26は、更新された作業進捗情報を管理装置13の作業進捗情報出力部53から受信する。
ステップST3において、管理装置13の測位情報出力部55は、図8に示す測位情報が更新されているか否かを判定する。具体的には、測位情報出力部55は、測位情報のうち更新時刻に基づいて、測位情報が更新されているか否かを判定する。ステップST3の判定がYesの場合には、処理はステップST4へ進む。ステップST3の判定がNoの場合には、処理はステップST5へ進む。
ステップST4において、作業計画変更装置11の測位情報入力部27は、更新された測位情報を管理装置13の測位情報出力部55から受信する。
ステップST5において、作業計画変更装置11の算出部29は、作業進捗情報に基づいて遅延時間を算出する。
ステップST6において、作業計画変更装置11の推定部30は、作業計画入力部28からの作業計画において、遅延の影響を受ける駐機スケジュールの駐機スケジュールIDを推定する。作業計画変更装置11の推定部30は、遅延時間と、駐機スケジュールと、作業進捗情報と、移動情報と、測位情報とに基づいて、作業計画入力部28からの作業計画において、遅延の影響を受ける駐機スケジュールの駐機スケジュールIDを推定する。推定部30は、例えば作業を取りまとめるオペレータに対し、遅延の影響を受ける駐機スケジュールの駐機スケジュールIDをアラートとして通知してもよい。
ステップST8において、作業計画変更装置11の作業計画変更部31は、推定情報に基づいて、遅延の影響を受ける駐機スケジュールの駐機スケジュールIDに対し、作業計画を変更する。あるいは、作業計画変更装置11の作業計画変更部31は、推定情報と、駐機スケジュールと、移動情報と、作業員情報と、必要資格情報と、測位情報とに基づいて、遅延の影響を受ける駐機スケジュールの駐機スケジュールIDの作業計画を変更する。作業計画変更部31は、作業を取りまとめるオペレータあるいは作業員に対し、変更された作業計画を通知してもよい。以上により、作業計画変更システム10は、図11に示す手順による動作を終了する。
なお、図11に示す手順では、駐機スケジュールおよび作業進捗情報のいずれも更新されない場合には、ステップST2以降の処理は行われない。これに限定されず、情報が更新されたか否かに関わらず、所定の周期でステップST2以降の処理を行うようにしてもよい。この場合、ステップST1の処理は行われない。また、ステップST2では、更新された情報のみ取得されるだけでなく、全ての情報、すなわち駐機スケジュール、移動情報、作業員情報、必要資格情報、作業進捗情報および測位情報が取得される。
実施の形態1によると、算出部29は、作業進捗情報に基づいて遅延時間を算出する。推定部30は、遅延時間と駐機スケジュールとに基づいて、遅延の影響を受ける駐機スケジュールの駐機スケジュールIDを推定して推定情報とする。作業計画変更部31は、推定情報に基づいて、作業計画を変更する。これにより、作業計画の変更の要否を適切に判定でき、変更すべき箇所を特定でき、作業計画を効率よく変更することができる。
推定部30は、移動情報も考慮して、遅延の影響を受ける駐機スケジュールの駐機スケジュールIDを推定する。これにより、推定情報を精度よく推定できる。作業計画変更部31は、移動情報も考慮して、作業計画を変更する。これにより、作業計画を精度よく変更することができる。
作業計画変更部31は、作業員情報も考慮して、作業計画を変更する。これにより、作業の特性に合った作業員を適切に配置するような作業計画とすることができる。作業計画変更部31は、必要資格情報も考慮して、作業計画を変更する。これにより、作業の特性に合った作業員を適切に配置するような作業計画とすることができる。
推定部30は、測位情報も考慮して、遅延の影響を受ける駐機スケジュールの駐機スケジュールIDを推定する。これにより、推定情報を精度よく推定できる。作業計画変更部31は、測位情報も考慮して、作業計画を変更する。これにより、遅延の影響を受ける駐機スケジュールの駐機スケジュールIDに対応する駐機場に近い作業員を割り当てることができ、作業員の負荷を最小限とするような作業計画とすることができる。
実施の形態1にかかる作業計画変更システム10における各構成要素の分散または統合の具体的形態は、実施の形態1で説明するものに限られない。例えば、駐機スケジュール記憶部41が、作業計画変更装置11に備えられても良い。駐機スケジュール記憶部41が作業計画変更装置11に備えられることによって、作業計画変更装置11の機能と記憶装置12の機能とが、1つの装置によって実現されても良い。または、作業進捗情報管理部52、測位情報管理部54および作業計画管理部56の少なくとも1つが、作業計画変更装置11に備えられても良い。作業進捗情報管理部52、測位情報管理部54および作業計画管理部56が作業計画変更装置11に備えられることによって、作業計画変更装置11の機能と管理装置13の機能とが、1つの装置によって実現されても良い。さらに、作業計画変更装置11の機能と、記憶装置12の機能と、管理装置13の機能とは、1つの装置によって実現されても良い。
実施の形態2.
実施の形態1において、作業計画変更部31は、推定情報と、駐機スケジュールと、移動情報と、作業員情報と、必要資格情報と、測位情報とに基づいて、任意の方法で、作業計画を変更する。一方、実施の形態2において、作業計画変更部31は、例えば機械学習を用いて作業計画を変更する。なお、実施の形態2にかかる作業計画変更システム10の構成図は、図1に示す構成図と同じである。
機械学習を用いて作業計画を変更する方法について説明する。図12は、実施の形態2において機械学習を用いる場合の作業計画変更部70の構成図の一例である。作業計画変更部70は、機械学習を用いて作業計画を変更する作業計画変更部31の一例とする。
作業計画変更部70は、学習装置71と、推論装置72と、学習済モデル記憶部73とを備える。学習装置71は、作業計画を学習する。学習装置71は、学習の結果である学習済モデルを出力する。学習済モデル記憶部73は、学習済モデルを記憶する。推論装置72は、作業計画を推論する学習済モデルを学習済モデル記憶部73から読み出す。推論装置72は、学習済モデルへ推論用データを入力することによって、変更された作業計画として推論結果を出力する。
図13は、実施の形態2にかかる作業計画変更部70が備える学習装置71の構成図の一例である。学習装置71は、データ取得部74とモデル生成部75とを備える。データ取得部74は、学習用データを取得し、学習用データをまとめ合わせたデータセットを作成する。学習用データは、最新の作業計画、推定情報、駐機スケジュール、作業進捗情報、移動情報、作業員情報、必要資格情報、および測位情報である。
モデル生成部75は、学習用データを用いて学習済モデルを生成する。モデル生成部75は、最新の作業計画、推定情報、駐機スケジュール、作業進捗情報、移動情報、作業員情報、必要資格情報、および測位情報から作業計画を推論する学習済モデルを生成する。
モデル生成部75が用いる学習アルゴリズムとしては、教師あり学習、教師なし学習、または強化学習等の公知のアルゴリズムを用いることができる。一例として、モデル生成部65が用いる学習アルゴリズムに強化学習を適用する場合について説明する。強化学習は、ある環境内におけるエージェントである行動主体が、現在の状態を観測し、取るべき行動を決定する、というものである。エージェントは行動を選択することで環境から報酬を得て、一連の行動を通じて報酬が最も多く得られるような方策を学習する。強化学習の代表的な手法として、Q学習およびTD(Temporal Difference)学習などが知られている。例えば、Q学習の場合、行動価値関数Q(s,a)の一般的な更新式である行動価値テーブルは、次の式(1)で表される。行動価値関数Q(s,a)は、環境「s」のもとで行動「a」を選択する行動の価値である行動価値Qを表す。
式(1)において、「st」は、時刻「t」における環境を表す。「at」は、時刻「t」における行動を表す。行動「at」によって、環境は「st+1」に変わる。「rt+1」は、その環境の変化によってもらえる報酬を表す。「γ」は、割引率を表す。「α」は、学習係数を表す。作業計画が、環境「st」となる。モデル生成部65内での作業計画の更新の方法または作業計画の更新のポイントが、行動「at」となる。最新の作業計画、推定情報、駐機スケジュール、作業進捗情報、移動情報、作業員情報、必要資格情報、および測位情報のデータが、作業計画の更新にあたり参照されるデータとなる。
式(1)により表される更新式は、時刻「t+1」における最良の行動「a」の行動価値が、時刻「t」で実行された行動「a」の行動価値Qよりも大きければ、行動価値Qを大きくし、逆の場合は、行動価値Qを小さくする。換言すれば、時刻「t」における行動「a」の行動価値Qを、時刻「t+1」における最良の行動価値に近づけるように、行動価値関数Q(s,a)を更新する。それにより、ある環境における最良の行動価値が、それ以前の環境における行動価値に順次伝播する。
モデル生成部75は、報酬計算部76および関数更新部77を有する。報酬計算部76は、データセットに基づいて報酬を計算する。関数更新部77は、報酬計算部76によって算出される報酬に従って、作業計画を決定するための関数を更新する。
具体的には、報酬計算部76は、作業計画の効率を指標とする目的関数の値に基づいて、報酬「r」を計算する。作業計画の効率とは、最新の作業計画からの変更量の少なさ、作業に割り当てる予備の作業員数の少なさ、全作業員の残業時間の偏りの少なさ、および担当する駐機場間の移動の少なさである。例えば、作業計画の効率が向上する方へ目的関数の値が変化した場合には、報酬計算部76は、報酬「r」を増大させる。報酬計算部76は、報酬の値である「1」を与えることによって報酬「r」を増大させる。なお、報酬の値は「1」に限られない。作業計画の効率が低下する方へ目的関数の値が変化した場合には、報酬計算部76は、報酬「r」を減少させる。報酬計算部76は、報酬の値である「-1」を与えることによって報酬「r」を低減させる。なお、報酬の値は「-1」に限られない。
関数更新部77は、報酬計算部76によって計算される報酬に従って、作業計画を決定するためのモデルである関数を更新する。関数の更新は、データセットに従って、例えば行動価値テーブルを更新することによって行うことができる。行動価値テーブルは、任意の行動と、その行動価値とを関連付けてテーブルの形式で記憶したデータセットである。例えばQ学習の場合、上記の式(1)により表される行動価値関数Q(st,at)を、推定情報を決定するための関数として用いる。
ここまで、モデル生成部75が用いる学習アルゴリズムに強化学習を適用する場合について説明したが、学習アルゴリズムには、強化学習以外の学習が適用されても良い。モデル生成部75は、強化学習以外の公知の学習アルゴリズム、例えば、深層学習、ニューラルネットワーク、遺伝的プログラミング、帰納論理プログラミングまたはサポートベクターマシンといった学習アルゴリズムを用いて機械学習を実行しても良い。
図14は、実施の形態2にかかる作業計画変更部70が備える推論装置72の構成図の一例である。推論装置72は、推論用データを基に、作業計画を推論する。
推論装置72は、データ取得部78と推論部79とを有する。データ取得部78は、推論用データを取得する。推論用データは、最新の作業計画、推定情報、駐機スケジュール、作業進捗情報、移動情報、作業員情報、必要資格情報、および測位情報である。
推論部79は、学習装置71によって生成された学習済モデルを、学習済モデル記憶部73から読み出す。推論部79は、学習済モデルへ推論用データを入力することによって、作業計画を推論する。推論部79は、変更された作業計画として推論結果を出力する。
このようにして、作業計画変更部70は、機械学習を用いて作業計画を変更する。これにより、作業計画変更装置11は、作業計画を精度よく変更することができる。
なお、学習装置71および推論装置72は、作業計画変更装置11に備えられるが、これに限定されない。学習装置71および推論装置72は、作業計画変更装置11の外部に備えられてもよい。この場合、学習装置71および推論装置72は、ネットワークを介して作業計画変更装置11に接続されてもよい。学習装置71および推論装置72は、クラウドサーバ上に存在していてもよい。
実施の形態2によると、作業計画変更部70は、機械学習を用いて、作業計画を変更する。これにより、変更の精度を向上できる。
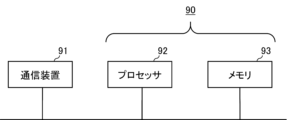
次に、作業計画変更装置11のハードウェア構成について説明する。図15は、実施の形態1および2にかかる作業計画変更装置11のハードウェア構成図の一例である。作業計画変更装置11は、処理回路90と通信装置91とを備えるコンピュータシステムにより実現される。処理回路90は、プロセッサ92およびメモリ93を備える。処理回路90は、プロセッサ92がソフトウェアを実行する回路である。
作業計画変更装置11の処理部である作業計画立案部25、算出部29、推定部30および作業計画変更部31は、ソフトウェア、ファームウェア、またはソフトウェアとファームウェアとの組み合わせにより実現される。ソフトウェアまたはファームウェアはプログラムとして記述され、メモリ93に格納される。処理回路90では、メモリ93に記憶されたプログラムである作業計画変更プログラムをプロセッサ92が読み出して実行することにより、作業計画立案部25、算出部29、推定部30および作業計画変更部31の機能を実現する。すなわち、処理回路90は、作業計画変更装置11の処理が結果的に実行されることになるプログラムを格納するためのメモリ93を備える。メモリ93に記憶された作業計画変更プログラムは、作業計画変更装置11の手順および方法をコンピュータに実行させるものであるともいえる。
プロセッサ92は、CPU(Central Processing Unit、中央処理装置、処理装置、演算装置、マイクロプロセッサ、マイクロコンピュータ、プロセッサ、またはDSP(Digital Signal Processor)ともいう)である。メモリ93は、例えば、RAM(Random Access Memory)、ROM(Read Only Memory)、フラッシュメモリ、EPROM(Erasable Programmable Read Only Memory)、EEPROM(登録商標)(Electrically Erasable Programmable Read Only Memory)等の、不揮発性または揮発性の半導体メモリ、磁気ディスク、フレキシブルディスク、光ディスク、コンパクトディスク、ミニディスクまたはDVD(Digital Versatile Disc)等が該当する。移動情報記憶部22、作業員情報記憶部23、および必要資格情報記憶部24は、メモリ93により実現される。駐機スケジュール入力部21、作業進捗情報入力部26、測位情報入力部27、作業計画入力部28、および作業計画出力部32は、通信装置91により実現される。
次に、記憶装置12のハードウェア構成について説明する。図16は、実施の形態1および2にかかる記憶装置12のハードウェア構成図の一例である。記憶装置12は、処理回路100と通信装置101とを備えるコンピュータシステムにより実現される。処理回路100は、プロセッサ102およびメモリ103を備える。通信装置101、プロセッサ102、およびメモリ103の機能は、それぞれ図15に示す通信装置91、プロセッサ92、およびメモリ93の機能と同じであるため、詳細な説明を省略する。駐機スケジュール記憶部41は、メモリ103により実現される。駐機スケジュール出力部42は、通信装置101により実現される。
次に、管理装置13のハードウェア構成について説明する。図17は、実施の形態1および2にかかる管理装置13のハードウェア構成図の一例である。管理装置13は、処理回路110と通信装置111とを備えるコンピュータシステムにより実現される。処理回路110は、プロセッサ112およびメモリ113を備える。通信装置111、プロセッサ112、およびメモリ113の機能は、それぞれ図15に示す通信装置91、プロセッサ92、およびメモリ93の機能と同じであるため、詳細な説明を省略する。
作業進捗情報管理部52、測位情報管理部54、および作業計画管理部56は、メモリ113により実現される。作業進捗情報出力部53、測位情報出力部55、作業計画入力部51、および作業計画出力部57は、通信装置111により実現される。
作業計画変更装置11、記憶装置12、および管理装置13の各々は、ASIC(Application Specific Integrated Circuit)またはFPGA(Field Programmable Gate Array)などの集積回路を含んでいても良い。作業計画変更装置11、記憶装置12、および管理装置13の各々は、2つ以上の装置で構成されても良い。運用計画立案プログラムは、CD(Compact Disc)-ROM、DVD-ROMなどの記録媒体に格納され、各実施の形態を実現させるために記録媒体が提供されても良い。
以上の各実施の形態に示した構成は、本開示の内容の一例を示すものである。各実施の形態の構成は、別の公知の技術と組み合わせることが可能である。各実施の形態の構成同士が適宜組み合わせられても良い。本開示の要旨を逸脱しない範囲で、各実施の形態の構成の一部を省略または変更することが可能である。