以下、図面を参照して実施形態について説明する。
[遠隔操作支援システムの概要]
まず、図1~図4を参照して、本実施形態に係る遠隔操作支援システムSYSの概要について説明をする。
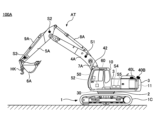
図1は、本実施形態に係る遠隔操作支援システムSYSの一例を示す概略図である。図2~図4は、遠隔操作支援システムSYSに含まれる作業機械100の具体例を示す図である。具体的には、図2、図3は、ショベル100Aの一例を示す側面図及び上面図であり、図4は、クローラクレーン100Bの一例を示す図である。以下、ショベル100A及びクローラクレーン100Bの対応する構成要素(例えば、同じ機能を有する構成要素)には同じ符号を付して説明を行う。
図1に示すように、遠隔操作支援システムSYSは、作業機械100と、遠隔操作支援装置200とを含む。
遠隔操作支援システムSYSに含まれる作業機械100は、一台であってもよいし、複数台であってもよい。また、遠隔操作支援システムSYSに複数の作業機械100が含まれる場合、複数の作業機械100は、全て同じ種類であってもよいし、その少なくとも一部が互いに異なる種類であってもよい。例えば、遠隔操作支援システムSYSは、後述のショベル100A及びクローラクレーン100Bの何れか一方だけを複数台含んでいてもよいし、ショベル100A及びクローラクレーン100Bの双方を含んでいてもよい。
また、遠隔操作支援システムSYSに含まれる遠隔操作支援装置200は、複数であってもよい。即ち、複数の遠隔操作支援装置200は、遠隔操作支援システムSYSに関する処理を分散して実施してよい。例えば、複数の遠隔操作支援装置200は、それぞれ、遠隔操作支援システムSYSに含まれる全ての作業機械100のうちの担当する一部の作業機械100との間で相互に通信を行い、一部の作業機械100を対象とする処理を実行してよい。
遠隔操作支援システムSYSは、遠隔操作支援装置200において、作業機械100の遠隔操作を支援する。
また、後述の如く、作業機械100が完全自動運転によって作業を行う場合、遠隔操作支援システムSYSは、例えば、遠隔操作支援装置200において、作業機械100の完全自動運転による作業の遠隔監視を支援してもよい。この場合、遠隔操作支援システムSYSは、遠隔操作支援装置200において、完全自動運転機能に対する監視者の介入による作業機械100の操作を支援してよい。
<作業機械の概要>
図2~図4に示すように、作業機械100は、下部走行体1と、旋回機構2を介して下部走行体1に旋回自在に搭載される上部旋回体3と、上部旋回体3に取り付けられるアタッチメントATと、オペレータが搭乗するキャビン10とを備える。以下、作業機械100(上部旋回体3)の前方は、ショベル100Aを上部旋回体3の旋回軸に沿って真上から平面視(上面視)で見たときに、上部旋回体3に対するアタッチメントが延び出す方向に対応する。
尚、作業機械100は、ショベル100Aやクローラクレーン100Bとは異なる他の機械であってもよい。例えば、作業機械100は、フォークリフト、エンドアタッチメントとしてリフティングマグネットが取り付けられたリフマグ機、ブルドーザ、ホイールローダ、アスファルトフィニッシャ、林業機械等であってもよい。
作業機械100は、下部走行体1、上部旋回体3、及びアタッチメントATの少なくとも一つを動作させることにより、各種作業を行うことができる。
また、作業機械100は、通信装置60を搭載し、所定の通信回線NWを通じて、遠隔操作支援装置200と相互に通信を行うことができる。これにより、作業機械100は、各種情報を遠隔操作支援装置200に送信(アップロード)したり、遠隔操作支援装置200から各種の信号(例えば、情報信号や制御信号)等を受信したりすることができる。
通信回線NWには、例えば、広域ネットワーク(WAN:Wide Area Network)が含まれる。広域ネットワークには、例えば、基地局を末端とする移動体通信網が含まれてよい。また、広域ネットワークには、例えば、作業機械100の上空の通信衛星を利用する衛星通信網が含まれてもよい。また、広域ネットワークには、例えば、インターネット網が含まれてもよい。また、通信回線NWには、例えば、遠隔操作支援装置200が設置される施設等のローカルネットワーク(LAN:Local Area Network)が含まれてもよい。ローカルネットワークは、無線回線であってもよいし、有線回線であってもよいし、その両方を含む回線であってよい。また、通信回線NWには、例えば、WiFiやブルートゥース(登録商標)等の所定の無線通信方式に基づく近距離通信回線が含まれてもよい。
作業機械100は、遠隔操作支援装置200から遠隔操作(リモート操作)が可能に構成される。作業機械100が遠隔操作される場合、キャビン10の内部は、無人状態であってもよい。
具体的には、遠隔操作支援装置200で行われる作業機械100のアクチュエータに関するユーザ(オペレータ)からの入力によって、作業機械100が操作される。この場合、作業機械100は、例えば、後述の撮像装置40,42の撮像画像や撮像画像に基づく加工画像(例えば、視点変換画像)等の作業機械100の周辺の様子を画像(以下、「周辺画像」)のデータを外部装置に送信する。そして、周辺画像は、遠隔操作支援装置200に設けられる、後述の表示装置230Aに表示される。また、作業機械100のキャビン10内の出力装置50(表示装置)に表示される各種の情報画像(情報画面)は、同様に、遠隔操作支援装置200の表示装置230Aにも表示されてよい。これにより、オペレータは、例えば、表示装置230Aに表示される作業機械100の周辺の様子を表す周辺画像や各種の情報画像等の表示内容を確認しながら、作業機械100を遠隔操作することができる。そして、作業機械100は、遠隔操作支援装置200から受信される、遠隔操作の内容を表す遠隔操作信号に応じて、アクチュエータを動作させ、下部走行体1、上部旋回体3、及びアタッチメントAT等の被駆動要素を駆動してよい。
また、作業機械100は、キャビン10に搭乗するオペレータの操作に応じて、アクチュエータ(例えば、油圧アクチュエータ)を動作させ、下部走行体1、上部旋回体3、及びアタッチメントAT等の被駆動要素を駆動してよい。以下、オペレータの操作には、キャビン10のオペレータによる操作装置26に対する操作、及び外部のオペレータによる遠隔操作の双方が含まれる前提で説明を進める。
また、作業機械100は、オペレータの操作の内容に依らず、自動でアクチュエータを動作させてもよい。これにより、作業機械100は、下部走行体1、上部旋回体3、アタッチメントAT等の被駆動要素の少なくとも一部を自動で動作させる機能、即ち、いわゆる「自動運転機能」或いは「マシンコントロール(Machine Control:MC)機能」を実現する。
自動運転機能には、オペレータの操作に応じて、操作対象の被駆動要素(アクチュエータ)以外の被駆動要素(アクチュエータ)を自動で動作させる機能、即ち、いわゆる「半自動運機能」或いは「操作支援型のMC機能」が含まれてよい。また、自動運転機能には、オペレータの操作がない前提で、複数の被駆動要素(油圧アクチュエータ)の少なくとも一部を自動で動作させる機能、即ち、いわゆる「完全自動運転機能」或いは「完全自動型のMC機能」が含まれてもよい。作業機械100において、完全自動運転機能が有効な場合、キャビン10の内部は無人状態であってよい。また、半自動運転機能や完全自動運転機能等には、自動運転の対象の被駆動要素(アクチュエータ)の動作内容が予め規定されるルールに従って自動的に決定される態様が含まれてよい。また、半自動運転機能や完全自動運転機能等には、作業機械100が自律的に各種の判断を行い、その判断結果に沿って、自律的に自動運転の対象の被駆動要素(油圧アクチュエータ)の動作内容が決定される、いわゆる「自律運転機能」が含まれてもよい。
作業機械100は、例えば、ショベル100Aである。
図2、図3に示すように、ショベル100Aは、下部走行体1と、旋回機構2を介して旋回自在に下部走行体1に搭載される上部旋回体3と、各種作業を行うためのアタッチメントATと、キャビン10とを備える。
下部走行体1は、例えば、左右一対のクローラ1Cを含む。下部走行体1は、それぞれのクローラ1Cが左側の走行油圧モータ1ML及び右側の走行油圧モータ1MRで油圧駆動されることにより、ショベル100Aを走行させる。
上部旋回体3は、旋回機構2が旋回油圧モータ2Mで油圧駆動されることにより、下部走行体1に対して旋回する。
アタッチメントATは、被駆動要素としてのブーム4A、アーム5A、及びバケット6Aを含む。
ブーム4Aは、上部旋回体3の前部中央に俯仰可能に取り付けられ、ブーム4Aの先端には、アーム5Aが上下回動可能に取り付けられ、アーム5Aの先端には、バケット6Aが上下回動可能に取り付けられる。
バケット6Aは、エンドアタッチメントの一例である。バケット6Aは、例えば、掘削作業等に用いられる。また、アーム5Aの先端には、作業内容等に応じて、バケット6Aの代わりに、他のエンドアタッチメントが取り付けられてもよい。他のエンドアタッチメントは、例えば、大型バケット、法面用バケット、浚渫用バケット等の他の種類のバケットであってよい。また、他のエンドアタッチメントは、攪拌機、ブレーカ、グラップル等のバケット以外の種類のエンドアタッチメントであってもよい。また、アーム5Aと、エンドアタッチメントとの間には、例えば、クイックカップリングやチルトローテータ等の予備アタッチメントが介装されてもよい。
また、バケット6Aには、クレーン作業用のフックHKが取り付けられてもよい。フックHKは、基端が、アーム5Aとバケット6Aとの間を連結するバケットピンに回動可能に連結される。これにより、フックHKは、掘削作業等のクレーン作業(吊り作業)以外の作業が行われる場合、2本のバケットリンクの間に形成される空間に収納される。
ブーム4A、アーム5A、及びバケット6Aは、それぞれ、油圧アクチュエータとしてのブームシリンダ7A、アームシリンダ8A、及びバケットシリンダ9Aにより油圧駆動される。
尚、ショベル100Aは、各種の油圧アクチュエータの一部又は全部が電動アクチュエータに置換されてもよい。つまり、ショベル100Aは、ハイブリッドショベルや電動ショベルであってもよい。
キャビン10は、オペレータが搭乗する操縦室であり、例えば、上部旋回体3の前部左側に搭載される。
尚、オペレータがショベル100Aに搭乗して操作を行わず、専ら、作業機械100が遠隔操作や完全自動運転機能で動作する場合、キャビン10は省略されてよい。以下、クローラクレーン100Bの場合についても同様である。
また、作業機械100は、例えば、クローラクレーン100Bである。
図4に示すように、クローラクレーン100Bは、下部走行体1と、旋回機構2を介して旋回自在に下部走行体1に搭載される上部旋回体3と、アタッチメントATと、マスト5Bと、バックストップ6Bと、フックHKと、カウンタウェイト9Bと、キャビン10とを備える。
下部走行体1は、例えば、左右一対のクローラ1Cを含む。下部走行体1は、それぞれのクローラ1Cが左側の走行油圧モータ1ML及び右側の走行油圧モータ1MR(図7参照)で油圧駆動されることにより、クローラクレーン100Bを走行させる。
上部旋回体3は、旋回油圧モータ2M(図7参照)で旋回機構2が油圧駆動されることにより、下部走行体1に対して旋回する。
アタッチメントAT(作業装置の一例)は、ブーム4Bと、主巻ロープ7Bとを含む。
ブーム4Bは、上部旋回体3の前部中央に起伏可能に取り付けられる。ブーム4Bの先端部から主巻ロープ7Bが垂下され、主巻ロープ7Bの先端には、フックHKが取り付けられる。即ち、ブーム4Bの先端には、主巻ロープ7Bを介してフックHKが取り付けられる。
主巻ロープ7Bは、その基端が、ブーム4Bの基端と先端との間の後面部分に取り付けられる主巻ウインチ7Baに取り付けられ、その先端がフックHKに取り付けられる。主巻ロープ7Bは、主巻油圧モータ7M(図7参照)で油圧駆動される主巻ウインチ7Baにより巻き取り及び巻き出しが行われることにより、フックHKを上下させることができる。
マスト5Bは、上部旋回体3のブーム4Bの基端部よりも若干後方において、ブーム4Bの回動軸と平行な回動軸回りに回動可能に取り付けられる。マスト5Bの先端部は、ペンダントロープ5Baを介してブーム4Bの先端部と接続され、起伏油圧モータ5M(図7参照)で油圧駆動されるブーム起伏ウインチ5Bcによるブーム起伏ロープ5Bbの巻き取り及び巻き出しにより、マスト5Bを介してブーム4Bが起伏する。
尚、クローラクレーン100Bは、ショベル100Aの場合と同様、各種の油圧アクチュエータの一部又は全部が電動アクチュエータに置換されてもよい。
バックストップ6Bは、その基端がブーム4Bの基端よりも後方の上部旋回体3の部分において、ブーム4Bの回動軸と平行な回動軸回りに回動可能に取り付けられ、その先端がブーム4Bの基端と先端との間の後面部分において、ブーム4Bの回動軸と平行な回動軸回りに回動可能に取り付けられる。バックストップ6Bは、ブーム4Bの起伏動作に応じて伸縮し、例えば、ブーム4Bが略直立状態の場合にブーム4Bを後方から支える機能を有する。
フックHKは、主巻ロープ7Bの先端に取り付けられ、吊り荷を吊り下げるために用いられる。
カウンタウェイト9Bは、上部旋回体3の後端部に設けられ、ブーム4B及び吊り荷SLの重量との重量バランスを取る機能を有する。
キャビン10は、例えば、上部旋回体3の右前端部に取り付けられる。キャビン10の内部には、操縦席や各種アクチュエータを操作する操作装置26(図7参照)が設けられる。
<遠隔操作支援装置の概要>
遠隔操作支援装置200(外部装置の一例)は、作業機械100の遠隔操作を支援する。また、遠隔操作支援装置200は、完全自動運転で作業を行う作業機械100の遠隔監視を支援してもよい。
遠隔操作支援装置200は、例えば、作業機械100が作業を行う作業現場の外部の管理センタ等に設置されるオンプレミスサーバやクラウドサーバであってよい。また、遠隔操作支援装置200は、例えば、作業機械100が作業行う作業現場内、或いは、作業現場から相対的に近い場所に配置されるエッジサーバであってもよい。また、遠隔操作支援装置200は、作業機械100の作業現場内の管理事務所等に配置される定置型の端末装置或いは携帯型の端末装置(携帯端末)であってもよい。定置型の端末装置には、例えば、デスクトップ型のコンピュータ端末が含まれてよい。また、携帯型の端末装置には、例えば、スマートフォン、タブレット端末、ラップトップ型のコンピュータ端末等が含まれてよい。
遠隔操作支援装置200は、例えば、通信装置220(図5~図7参照)を有し、上述の如く、通信回線NWを通じて、作業機械100と相互に通信を行う。これにより、遠隔操作支援装置200は、作業機械100からアップロードされる各種情報を受信したり、各種信号を作業機械100に送信したりすることができる。そのため、遠隔操作支援装置200のユーザは、出力装置230(図2、図3参照)を通じて、作業機械100に関する各種情報を確認することができる。また、遠隔操作支援装置200は、例えば、作業機械100に情報信号を送信し、作業に必要な情報を提供したり、制御信号を送信し、作業機械100を制御したりすることができる。遠隔操作支援装置200のユーザには、例えば、作業機械100のオーナ、作業機械100の管理者、作業機械100のメーカの技術者、作業機械100のオペレータ、作業機械100の作業現場の管理者、監督者、作業者等が含まれてよい。
例えば、遠隔操作支援装置200は、オペレータが遠隔操作を行うための入力を行う遠隔操作装置240A、及び作業機械100の周辺の画像(周辺画像)等を表示する表示装置230Aを有する。遠隔操作装置240Aから入力される信号は、遠隔操作信号として、遠隔操作支援装置200から作業機械100に送信される。これにより、遠隔操作支援装置200のユーザ(オペレータ)は、表示装置230Aで作業機械100の周辺の様子を確認しながら、遠隔操作装置240Aを用いて、作業機械100の遠隔操作を行うことができる。
例えば、遠隔操作支援装置200のユーザ(監視者)は、表示装置230Aで作業機械100の作業の様子を監視することができる。また、例えば、遠隔操作支援装置200のユーザ(監視者)は、作業機械100に異常が発生している場合や作業機械100の動作が不適切な場合等に、遠隔操作装置240Aを利用して、作業機械100の自動運転機能に対する介入操作を行うことができる。そのため、監視者は、遠隔操作装置240Aを用いて、作業機械100を非常停止させたり、作業機械100に適切な動作を行わせる遠隔操作を実施したりすることができる。
[遠隔操作支援システムの構成]
次に、図5~図7を参照して、遠隔操作支援システムSYSの構成について説明する。
図5は、本実施形態に係る遠隔操作支援システムSYSの構成の一例を示すブロック図である。図6は、ショベル100Aの構成の一例を示す図である。具体的には、図6は、図5に対応するショベル100Aの構成の具体例を示す図である。図7は、クローラクレーン100Bの構成の一例を示す図である。具体的には、図7は、図5に対応するクローラクレーン100Bの構成の具体例を示す図である。
尚、図5~図7では、機械的動力が伝達される経路は二重線、油圧アクチュエータを駆動する高圧の作動油が流れる経路は実線、パイロット圧が伝達される経路は破線、電気信号が伝達される経路は点線でそれぞれ示される。
<作業機械の構成>
作業機械100は、被駆動要素の油圧駆動に関する油圧駆動系、被駆動要素の操作に関する操作系、ユーザとの情報のやり取りに関するユーザインタフェース系、外部との通信に関する通信系、及び各種制御に関する制御系等のそれぞれの構成要素を含む。
<<油圧駆動系>>
図5に示すように、本実施形態に係る作業機械100の油圧駆動系は、上述の如く、下部走行体1(左右のクローラ1C)、上部旋回体3、及びアタッチメントAT等の被駆動要素のそれぞれを油圧駆動する油圧アクチュエータHAを含む。また、本実施形態に係る作業機械100の油圧駆動系は、エンジン11と、レギュレータ13と、メインポンプ14と、コントロールバルブ17とを含む。
図6に示すように、作業機械100がショベル100Aである場合、油圧アクチュエータHAには、走行油圧モータ1ML,1MR、旋回油圧モータ2M、ブームシリンダ7A、アームシリンダ8A、及びバケットシリンダ9A等が含まれる。
また、図7に示すように、作業機械100がクローラクレーン100Bである場合、油圧アクチュエータHAには、走行油圧モータ1ML,1MR、旋回油圧モータ2M、起伏油圧モータ5M、及び主巻油圧モータ7M等が含まれる。
エンジン11は、作業機械100の原動機であり、油圧駆動系におけるメイン動力源である。エンジン11は、例えば、軽油を燃料とするディーゼルエンジンである。エンジン11は、例えば、上部旋回体3の後部に搭載される。エンジン11は、後述するコントローラ30による直接或いは間接的な制御下で、予め設定される目標回転数で一定回転し、メインポンプ14及びパイロットポンプ15を駆動する。
尚、エンジン11に代えて、或いは、加えて、他の原動機(例えば、電動機)等が作業機械100に搭載されてもよい。
レギュレータ13は、コントローラ30の制御下で、メインポンプ14の吐出量を制御(調節)する。例えば、レギュレータ13は、コントローラ30からの制御指令に応じて、メインポンプ14の斜板の角度(以下、「傾転角」)を調節する。
メインポンプ14は、高圧油圧ラインを通じてコントロールバルブ17に作動油を供給する。メインポンプ14は、例えば、エンジン11と同様、上部旋回体3の後部に搭載される。メインポンプ14は、上述の如く、エンジン11により駆動される。メインポンプ14は、例えば、可変容量式油圧ポンプであり、上述の如く、コントローラ30の制御下で、レギュレータ13により斜板の傾転角が調節されることによりピストンのストローク長が調整され、吐出流量(吐出圧)が制御される。
コントロールバルブ17は、オペレータの操作装置26に対する操作や遠隔操作の内容、或いは、コントローラ30から出力される自動運転機能に関する操作指令に応じて、油圧アクチュエータHAの制御を行う油圧制御装置である。自動運転機能に対応する操作指令は、コントローラ30が生成してもよいし、自動運転機能に関する制御を行う他の制御装置(演算装置)が生成してもよい。コントロールバルブ17は、例えば、上部旋回体3の中央部に搭載される。コントロールバルブ17は、上述の如く、高圧油圧ラインを介してメインポンプ14と接続され、メインポンプ14から供給される作動油を、オペレータの操作、或いは、自動運転機能に対応する操作指令に応じて、それぞれの油圧アクチュエータに選択的に供給する。具体的には、コントロールバルブ17は、メインポンプ14から油圧アクチュエータHAのそれぞれに供給される作動油の流量と流れる方向を制御する複数の制御弁(「方向切換弁」とも称する)を含む。
<<操作系>>
図5に示すように、本実施形態に係る作業機械100の操作系は、パイロットポンプ15と、操作装置26と、油圧制御弁31と、シャトル弁32と、油圧制御弁33とを含む。
パイロットポンプ15は、パイロットライン25を介して各種油圧機器にパイロット圧を供給する。パイロットポンプ15は、例えば、エンジン11と同様、上部旋回体3の後部に搭載される。パイロットポンプ15は、例えば、固定容量式油圧ポンプであり、上述の如く、エンジン11により駆動される。
尚、パイロットポンプ15は、省略されてもよい。この場合、メインポンプ14から吐出される相対的に高い圧力の作動油が所定の減圧弁により減圧された後の相対的に低い圧力の作動油がパイロット圧として各種油圧機器に供給される。
操作装置26は、キャビン10の操縦席付近に設けられ、オペレータが各種被駆動要素の操作を行うために用いられる。換言すれば、操作装置26は、オペレータがそれぞれの被駆動要素を駆動する油圧アクチュエータHAの操作を行うために用いられる。操作装置26は、それぞれの被駆動要素(油圧アクチュエータHA)を操作するためのペダル装置やレバー装置を含む。
例えば、図4に示すように、操作装置26は、油圧パイロット式である。具体的には、操作装置26は、パイロットライン25及びそこから分岐されるパイロットライン25Aを通じてパイロットポンプ15から供給される作動油を利用し、操作内容に応じたパイロット圧を二次側のパイロットライン27Aに出力する。パイロットライン27Aは、シャトル弁32の一方の入口ポートに接続され、シャトル弁32の出口ポートに接続されるパイロットライン27を介して、コントロールバルブ17に接続される。これにより、コントロールバルブ17には、シャトル弁32を介して、操作装置26における各種被駆動要素(油圧アクチュエータ)に関する操作内容に応じたパイロット圧が入力されうる。そのため、コントロールバルブ17は、オペレータ等による操作装置26に対する操作内容に応じて、それぞれの油圧アクチュエータHAを駆動することができる。
尚、操作装置26は、電気式であってもよい。この場合、パイロットライン27A、シャトル弁32、及び油圧制御弁33は省略される。具体的には、操作装置26は、操作内容に応じた電気信号(以下、「操作信号」)を出力し、操作信号は、コントローラ30に取り込まれる。そして、コントローラ30は、操作信号の内容に応じた制御指令、つまり、操作装置26に対する操作内容に応じた制御信号を油圧制御弁31に出力する。これにより、油圧制御弁31からコントロールバルブ17に操作装置26の操作内容に応じたパイロット圧が入力され、コントロールバルブ17は、操作装置26の操作内容に応じて、それぞれの油圧アクチュエータHAを駆動することができる。また、コントロールバルブ17に内蔵される、それぞれの油圧アクチュエータを駆動する制御弁(方向切換弁)は、電磁ソレノイド式であってもよい。この場合、操作装置26から出力される操作信号がコントロールバルブ17に、即ち、電磁ソレノイド式の制御弁に直接入力されてもよい。また、作業機械100が遠隔操作される場合や自動運転機能により動作する場合、操作装置26は省略されてもよい。
油圧制御弁31は、操作装置26の操作対象の被駆動要素(油圧アクチュエータHA)ごとに設けられる。油圧制御弁31は、例えば、パイロットポンプ15とコントロールバルブ17との間のパイロットライン25Bに設けられ、その流路面積(即ち、作動油が通流可能な断面積)を変更可能に構成されてよい。これにより、油圧制御弁31は、パイロットライン25Bを通じて供給されるパイロットポンプ15の作動油を利用して、所定のパイロット圧を二次側のパイロットライン27Bに出力することができる。そのため、図4に示すように、油圧制御弁31は、パイロットライン27Bとパイロットライン27の間のシャトル弁32を通じて、間接的に、コントローラ30からの制御信号に応じた所定のパイロット圧をコントロールバルブ17に作用させることができる。また、図5に示すように、油圧制御弁31は、パイロットライン27B及びパイロットライン27を通じて、直接的に、コントローラ30からの制御信号に応じた所定のパイロット圧をコントロールバルブ17に作用させることができる。そのため、コントローラ30は、油圧制御弁31から電気式の操作装置26の操作内容に応じたパイロット圧をコントロールバルブ17に供給させ、オペレータの操作に基づく作業機械100の動作を実現することができる。
また、コントローラ30は、例えば、油圧制御弁31を制御し、自動運転機能を実現してもよい。具体的には、コントローラ30は、操作装置26の操作の有無に依らず、自動運転機能に関する操作指令に対応する制御信号を油圧制御弁31に出力する。これにより、コントローラ30は、油圧制御弁31から自動運転機能に関する操作指令に対応するパイロット圧をコントロールバルブ17に供給させ、自動運転機能に基づく作業機械100の動作を実現することができる。
また、コントローラ30は、例えば、油圧制御弁31を制御し、作業機械100の遠隔操作を実現してもよい。具体的には、コントローラ30は、通信装置60によって、遠隔操作支援装置200から受信される遠隔操作信号で指定される遠隔操作の内容に対応する制御信号を油圧制御弁31に出力する。これにより、コントローラ30は、油圧制御弁31から遠隔操作の内容に対応するパイロット圧をコントロールバルブ17に供給させ、オペレータの遠隔操作に基づく作業機械100の動作を実現することができる。
シャトル弁32は、2つの入口ポートと1つの出口ポートを有し、2つの入口ポートに入力されたパイロット圧のうちの高い方のパイロット圧を有する作動油を出口ポートに出力させる。シャトル弁32は、操作装置26の操作対象の被駆動要素(油圧アクチュエータHA)ごとに設けられる。シャトル弁32の2つの入口ポートのうちの一方が操作装置26(具体的には、操作装置26に含まれる上述のレバー装置やペダル装置)の二次側のパイロットライン27Aに接続され、他方が油圧制御弁31の二次側のパイロットライン27Bに接続される。シャトル弁32の出口ポートは、パイロットライン27を通じて、コントロールバルブ17の対応する制御弁のパイロットポートに接続される。対応する制御弁とは、シャトル弁32の一方の入口ポートに接続される上述のレバー装置或いはペダル装置の操作対象である油圧アクチュエータを駆動する制御弁である。そのため、これらのシャトル弁32は、それぞれ、操作装置26の二次側のパイロットライン27Aのパイロット圧と油圧制御弁31の二次側のパイロットライン27Bのパイロット圧のうちの高い方を、対応する制御弁のパイロットポートに作用させることができる。つまり、コントローラ30は、操作装置26の二次側のパイロット圧よりも高いパイロット圧を油圧制御弁31から出力させることで、オペレータの操作装置26に対する操作に依らず、対応する制御弁を制御することができる。よって、コントローラ30は、オペレータの操作装置26に対する操作状態に依らず、被駆動要素(下部走行体1、上部旋回体3、アタッチメントAT)の動作を制御し、自動運転機能を実現することができる。
油圧制御弁33は、操作装置26とシャトル弁32とを接続するパイロットライン27Aに設けられる。油圧制御弁33は、例えば、その流路面積を変更可能なように構成される。油圧制御弁33は、コントローラ30から入力される制御信号に応じて動作する。これにより、コントローラ30は、オペレータにより操作装置26が操作されている場合に、操作装置26から出力されるパイロット圧を強制的に減圧させることができる。そのため、コントローラ30は、操作装置26が操作されている場合であっても、操作装置26の操作に対応する油圧アクチュエータの動作を強制的に抑制させたり停止させたりすることができる。また、コントローラ30は、例えば、操作装置26が操作されている場合であっても、操作装置26から出力されるパイロット圧を減圧させ、油圧制御弁31から出力されるパイロット圧よりも低くすることができる。そのため、コントローラ30は、油圧制御弁31及び油圧制御弁33を制御することで、例えば、操作装置26の操作内容とは無関係に、所望のパイロット圧をコントロールバルブ17内の制御弁のパイロットポートに確実に作用させることができる。よって、コントローラ30は、例えば、油圧制御弁31に加えて、油圧制御弁33を制御することで、作業機械100の自動運転機能や遠隔操作機能をより適切に実現することができる。
<<ユーザインタフェース系>>
図5に示すように、本実施形態に係る作業機械100のユーザインタフェース系は、操作装置26と、出力装置50と、入力装置52とを含む。
出力装置50は、作業機械100のユーザ(例えば、キャビン10のオペレータや作業機械100の周辺の作業車等)に向けて各種情報を出力する。
例えば、出力装置50は、視覚的な方法で各種情報を出力する照明機器や表示装置等を含む。照明機器は、例えば、警告灯等である。表示装置は、例えば、液晶ディスプレイや有機EL(Electroluminescence)ディスプレイ等である。照明機器や表示装置は、例えば、キャビン10の内部に設けられ、キャビン10の内部のオペレータ等に視覚的な方法で各種情報を出力してよい。また、照明機器や表示装置は、例えば、上部旋回体3の側面等に設けられ、作業機械100の周囲の作業者等に視覚的な方法で各種情報を出力してもよい。
また、例えば、出力装置50は、聴覚的な方法で各種情報を出力する音出力装置を含む。音出力装置には、例えば、ブザーやスピーカ等が含まれる。音出力装置は、例えば、キャビン10の内部に設けられ、キャビン10の内部のオペレータ等に聴覚的な方法で各種情報を出力してよい。
また、例えば、出力装置50は、操縦席の振動等の触覚的な方法で各種情報を出力する装置を含んでもよい。
入力装置52は、作業機械100のユーザからの各種入力を受け付け、受け付けられる入力に対応する信号は、コントローラ30に取り込まれる。入力装置52は、例えば、キャビン10の内部に設けられ、キャビン10の内部のオペレータ等からの入力を受け付ける。また、入力装置52は、例えば、上部旋回体3の側面等に設けられ、作業機械100の周辺の作業者等からの入力を受け付けてもよい。
例えば、入力装置52は、操作入力を受け付ける操作入力装置である。操作入力装置には、表示装置に実装されるタッチパネル、表示装置の周囲に設置されるタッチパッド、ボタンスイッチ、レバー、トグル、操作装置26(レバー装置)に設けられるノブスイッチ等が含まれてよい。
また、例えば、入力装置52は、ユーザの音声入力を受け付ける音声入力装置であってもよい。音声入力装置には、例えば、マイクロフォンが含まれる。
また、例えば、入力装置52は、ユーザのジェスチャ入力を受け付けるジェスチャ入力装置であってもよい。ジェスチャ入力装置には、例えば、ユーザが行うジェスチャの様子を撮像する撮像装置が含まれる。
<<通信系>>
図5に示すように、本実施形態に係る作業機械100の通信系は、通信装置60を含む。
通信装置60(作業装置用通信装置の一例)は、通信回線NWに接続し、作業機械100と別に設けられる装置(例えば、遠隔操作支援装置200)と通信を行う。作業機械100と別に設けられる装置には、作業機械100の外部にある装置の他、作業機械100のユーザによりキャビン10に持ち込まれる携帯型の端末装置が含まれてよい。通信装置60は、例えば、4G(4th Generation)や5G(5th Generation)等の規格に準拠する移動体通信モジュールを含んでよい。また、通信装置60は、例えば、衛星通信モジュールを含んでもよい。また、通信装置60は、例えば、WiFi通信モジュールやブルートゥース(登録商標)通信モジュール等を含んでもよい。
<<制御系>>
図5に示すように、本実施形態に係る作業機械100の制御系は、コントローラ30を含む。また、本実施形態に係る作業機械100の制御系は、操作圧センサ29と、撮像装置40,42と、取得装置SXとを含む。
コントローラ30(物体検知装置の一例)は、作業機械100に関する各種制御を行う。コントローラ30の機能は、任意のハードウェア、或いは、任意のハードウェア及びソフトウェアの組み合わせ等により実現されてよい。例えば、コントローラ30は、CPU(Central Processing Unit)、RAM(Random Access Memory)等のメモリ装置、ROM(Read Only Memory)等の不揮発性の補助記憶装置、及び各種入出力用のインタフェース装置等を含むコンピュータを中心に構成される。
コントローラ30は、機能部として、操作制御部301と、画像送信部302と、物体検知部303と、安全制御部304とを含む。操作制御部301、画像送信部302、物体検知部303、及び安全制御部304の機能は、例えば、補助記憶装置にインストールされるプログラムをメモリ装置にロードしCPU上で実行することにより各種機能を実現される。
尚、コントローラ30の機能の一部は、他のコントローラ(制御装置)により実現されてもよい。即ち、コントローラ30の機能は、複数のコントローラにより分散して実現される態様であってもよい。
操作圧センサ29は、油圧パイロット式の操作装置26の二次側(パイロットライン27A)のパイロット圧、即ち、操作装置26におけるそれぞれの被駆動要素(油圧アクチュエータ)の操作状態に対応するパイロット圧を検出する。操作圧センサ29による操作装置26におけるそれぞれの被駆動要素(油圧アクチュエータHA)に関する操作状態に対応するパイロット圧の検出信号は、コントローラ30に取り込まれる。
尚、操作装置26が電気式である場合、操作圧センサ29は省略される。コントローラ30は、操作装置26から取り込まれる操作信号に基づき、操作装置26を通じたそれぞれの被駆動要素の操作状態を把握することができるからである。
撮像装置40(取得装置の一例)は、ショベル100Aの周辺において、オペレータから見た死角や視認しにくい場所を補間するための画像を取得する。撮像装置40の出力は、コントローラ30に取り込まれる。
撮像装置40は、例えば、単眼カメラ、ステレオカメラ、デプスカメラ等を含む。また、撮像装置40は、撮像画像に基づき、所定の撮像範囲(画角)内における作業機械100の周辺の物体の位置及び外形を表す三次元データ(例えば、点群データやサーフェスデータ)を取得してもよい。
例えば、図2、図3に示すように、ショベル100Aの撮像装置40は、上部旋回体3の後方を撮像するカメラ40B、上部旋回体3の左方を撮像するカメラ40L、及び上部旋回体3の右方を撮像するカメラ40Rを含む。これにより、オペレータは、出力装置50や表示装置230Aを通じて、撮像装置40の撮像画像や当該撮像画像に基づき生成される加工画像等の周辺画像を視認し、上部旋回体3の左方、右方、及び後方の様子を確認することができる。
尚、図3の二点鎖線は、カメラ40B,40L,40Rの上面視の画角(撮像範囲)を表している。
また、例えば、図4に示すように、クローラクレーン100Bの撮像装置40は、例えば、ブーム4Bに取り付けられ、フックHK及びフックHKに吊られる吊り荷の周辺の様子を上から見た撮像画像を取得する。これにより、オペレータは、出力装置50(表示装置)や表示装置230Aを通じて、撮像装置40の撮像画像や当該撮像画像に基づき生成される加工画像等の周辺画像を視認し、フックHKに吊られる吊り荷の周辺の様子を上から見た視点で確認することができる。
尚、ショベル100Aにおいて、図4の形態の撮像装置40が設けられてもよいし、クローラクレーン100Bにおいて、図2、図3の形態の撮像装置40(カメラ40B,40L,40R)が設けられてもよい。
撮像装置42は、遠隔操作のオペレータや遠隔監視の監視者がアタッチメントATによる作業の様子を確認するための作業機械100の周辺の画像を取得する。撮像装置42の出力は、コントローラ30に取り込まれる。
撮像装置42は、例えば、単眼カメラ、ステレオカメラ、デプスカメラ等を含む。また、撮像装置42は、撮像画像に基づき、所定の撮像範囲(画角)内における作業機械100の周辺の物体の位置及び外形を表す三次元データ(例えば、点群データやサーフェスデータ)を取得してもよい。
例えば、図2、図3に示すように、ショベル100Aの撮像装置42は、例えば、キャビン10の上面前部等、上部旋回体3の前部に設けられ、アタッチメントATの先端(バケット6A)を含む上部旋回体3の前方の様子を撮像する。これにより、オペレータは、表示装置230Aを通じて、撮像装置42の撮像画像や当該撮像装置42に基づき生成される加工画像等の周辺画像を視認することで、バケット6Aを含むアタッチメントATの動作を確認しながら、ショベル100Aを操作することができる。
また、例えば、図4に示すように、クローラクレーン100Bの撮像装置42は、例えば、キャビン10の上面前部等、上部旋回体3の前部に設けられ、フックHKを含む上部旋回体3の前方の様子を撮像する。具体的には、撮像装置42は、上部旋回体3の前方斜め上の地面から離れた相対的に高い高さ方向の空間を撮像するカメラ42Aと、上部旋回体3の前方斜め下の地面付近の相対的に低い高さ方向の範囲を撮像するカメラ42Bとを含む。これにより、オペレータは、表示装置230Aを通じて、撮像装置42の撮像画像や当該撮像画像に基づき生成される加工画像等の周辺画像を視認することで、フックHKの動きを確認しながら、クローラクレーン100Bを操作することができる。
取得装置SXは、ショベル100Aの状態やショベル100Aの周辺の状態等に関する情報を取得する。取得装置SXの出力は、コントローラ30に取り込まれる。
図6に示すように、作業機械100がショベル100Aである場合、取得装置SXは、ブーム角度センサS1と、アーム角度センサS2と、バケット角度センサS3と、機体姿勢センサS4と、旋回角度センサS5とを含む。
また、図7に示すように、作業機械100がクローラクレーン100Bである場合、取得装置SXは、機体姿勢センサS4と、旋回角度センサS5とを含む。
ブーム角度センサS1は、所定基準(例えば、水平面やブーム4Aの可動角度範囲の両端の何れかの状態等)に対するブーム4Aの姿勢角度(以下、「ブーム角度」)に関する検出情報を取得する。ブーム角度センサS1は、例えば、ロータリエンコーダ、加速度センサ、角速度センサ、六軸センサ、IMU(Inertial Measurement Unit)等を含んでよい。また、ブーム角度センサS1は、ブームシリンダ7Aの伸縮位置を検出可能なシリンダセンサを含んでもよい。
アーム角度センサS2は、所定基準(例えば、ブーム4Aの両端の連結点間を結ぶ直線やアーム5Aの可動角度範囲の両端の何れかの状態等)に対するアーム5Aの姿勢角度(以下、「アーム角度」)に関する検出情報を取得する。アーム角度センサS2は、例えば、ロータリエンコーダ、加速度センサ、角速度センサ、六軸センサ、IMU等を含んでよい。また、アーム角度センサS2は、アームシリンダ8Aの伸縮位置を検出可能なシリンダセンサを含んでもよい。
バケット角度センサS3は、所定基準(例えば、アーム5Aの両端の連結点間を結ぶ直線やバケット6Aの可動角度範囲の両端の何れかの状態等)に対するバケット6Aの姿勢角度(以下、「バケット角度」)に関する検出情報を取得する。バケット角度センサS3は、例えば、ロータリエンコーダ、加速度センサ、角速度センサ、六軸センサ、IMU等を含んでよい。また、バケット角度センサS3は、バケットシリンダ9Aの伸縮位置を検出可能なシリンダセンサを含んでもよい。
機体姿勢センサS4は、下部走行体1及び上部旋回体3を含む作業機械100の機体の姿勢状態に関する検出情報を取得する。機体姿勢センサS4は、例えば、上部旋回体3に搭載され、上部旋回体3の水平面に対する傾斜角度や旋回軸回りの姿勢角度(即ち、地面を基準とする上部旋回体3の向き)に関する検出情報を取得する。機体姿勢センサS4は、例えば、加速度センサ(傾斜センサ)、角速度センサ、六軸センサ、IMU等を含んでよい。
旋回角度センサS5は、下部走行体1を基準とする上部旋回体3の旋回角度(即ち、上部旋回体3の向き)に関する検出情報を取得する。旋回角度センサS5は、例えば、ポテンショメータ、ロータリエンコーダ、レゾルバ等を含む。
また、例えば、取得装置SXは、自機の絶対位置を測位可能な測位装置を含んでもよい。測位装置は、例えば、GNSS(Global Navigation Satellite System)センサである。これにより、作業機械100の姿勢状態の推定精度を向上させることができる。
また、例えば、取得装置SXは、作業機械100の周辺の物体との距離を検出する距離センサ(取得装置の一例)を含んでもよい。距離センサは、例えば、LIDAR(Light Detecting and Ranging)、ミリ波レーダ、超音波センサ、赤外線センサ、距離画像センサ等を含む。これにより、コントローラ30(物体検知部303)は、撮像装置40,42の出力に代えて、或いは、加えて、距離センサの出力を用いて、作業機械100の周辺の物体を検知することができる。
尚、ショベル100AのセンサS1~S5やクローラクレーン100BのセンサS4,S5は、省略されてもよい。例えば、撮像装置40,42や後述の距離センサ等により取得されるショベル100Aの周辺の情報には、機体(上部旋回体3)から見た周囲の物体やアタッチメントの位置や形状等に関する情報が含まれる場合がある。この場合、例えば、コントローラ30は、要求される精度によっては、その情報からアタッチメントATや機体(上部旋回体3)の姿勢状態を推定することも可能だからである。
操作制御部301は、油圧制御弁31を制御対象として、作業機械100の油圧アクチュエータの操作に関する制御を行う。
操作制御部301は、例えば、油圧制御弁31を制御対象として、電気式の操作装置26の操作に基づく作業機械100の油圧アクチュエータHA(被駆動要素)の操作に関する制御を行う。具体的には、操作制御部301は、操作装置26から出力される操作信号の内容に応じて、複数の油圧アクチュエータHA(被駆動要素)のそれぞれに対応する油圧制御弁31を選択的に制御してよい。
また、操作制御部301は、例えば、油圧制御弁31を制御対象として、作業機械100の油圧アクチュエータHA(被駆動要素)の遠隔操作に関する制御を行う。即ち、作業機械100の油圧アクチュエータHA(被駆動要素)の操作には、作業機械100の外部(遠隔操作支援装置200)からの油圧アクチュエータHAの遠隔操作が含まれる。具体的には、操作制御部301は、通信装置60を通じて遠隔操作支援装置200から受信される遠隔操作信号の内容に応じて、複数の油圧アクチュエータHA(被駆動要素)のそれぞれに対応する油圧制御弁31を選択的に制御してよい。
また、操作制御部301は、例えば、油圧制御弁31を制御対象として、作業機械100の自動運転機能に関する制御を行う。具体的には、即ち、作業機械100の油圧アクチュエータHAの操作には、自動運転機能に基づき出力される、作業機械100の油圧アクチュエータHAの操作指令が含まれてよい。具体的には、操作制御部301は、操作指令の内容に応じて、複数の油圧アクチュエータHA(被駆動要素)のそれぞれに対応する油圧制御弁31を選択的に制御してよい。
画像送信部302は、撮像装置40の撮像画像、或いは、撮像装置40の撮像画像に基づき生成する加工画像等の周辺画像を、通信装置60を通じて、遠隔操作支援装置200に送信する。
例えば、ショベル100Aの画像送信部302は、撮像装置40の撮像画像に基づき、複数のカメラ(カメラ40B,40L,40Rのうちの少なくとも二つのカメラ)の撮像画像を合成した加工画像(合成画像)を生成し、遠隔操作支援装置200に送信してよい。
具体的には、画像送信部302は、カメラ40B、40L,40Rの撮像画像に基づき、既知の視点変換処理及び合成処理等を行うことにより、仮想視点から見た合成画像(視点変換画像)を生成し、遠隔操作支援装置200に送信してよい。
また、例えば、クローラクレーン100Bの画像送信部302は、撮像装置40の撮像画像に基づき、視点変換画像を生成し、遠隔操作支援装置200に送信してよい。
同様に、画像送信部302は、撮像装置42の撮像画像、或いは、撮像装置42の撮像画像に基づきコントローラ30が生成する加工画像等の周辺画像を、通信装置60を通じて、遠隔操作支援装置200に送信する。
例えば、ショベル100Aの画像送信部302は、撮像装置42の撮像画像に基づき、視点変換画像を生成し、遠隔操作支援装置200に送信してよい。また、ショベル100Aの画像送信部302は、撮像装置40,42の撮像画像に対して既知の視点変換処理及び合成処理等を行うことにより、ショベル100Aの周辺の水平方向360度を仮想視点から見た合成画像を生成し、遠隔操作支援装置200に送信してもよい。
物体検知部303は、撮像装置40の出力に基づき、作業機械100の周辺の監視対象の所定の物体(以下、「監視物体」)を検知する。
監視物体には、作業機械100の周辺で作業する作業者や作業現場の監督者等の人が含まれてよい。また、監視物体には、作業現場の人以外の任意の物体(障害物)が含まれてよい。作業現場の人以外の障害物には、例えば、穴、溝、土砂の山等の特定の地形、ロードコーン、柵、電柱、仮置きの資材、作業現場の仮設事務所等の定置された(移動しない)障害物が含まれてよい。また、作業現場の人以外の障害物には、例えば、他の作業機械や作業車両等の移動可能な障害物が含まれてよい。
物体検知部303は、撮像装置40の出力、即ち、撮像装置40で撮像された撮像画像に基づき、作業機械100(上部旋回体3)の周辺の所定の監視エリア(以下、便宜的に「監視エリア」)において、監視物体を検知する。以下、物体検知部303に関する説明は、作業機械100が水平面に位置している仮定の下で行う。具体的には、ショベル100Aの物体検知部303は、上部旋回体3の後方、左方、及び右方に亘る監視エリアにおいて、監視物体を検知してよい。また、クローラクレーン100Bの物体検知部303は、フックHKに吊られた吊り荷の周辺の監視エリアにおいて、監視物体を検知してよい。
尚、物体検知部303は、上部旋回体3に上述の距離センサが搭載される場合、撮像装置40の出力に代えて、或いは、加えて、距離センサの出力に基づき、監視物体を検知してよい。また、物体検知部303は、撮像装置40の出力に加えて、撮像装置42の出力に基づき、上部旋回体3の周辺の物体を検知してもよい。即ち、物体検知部303は、撮像装置40,42の出力に基づき、撮像装置42の撮像範囲を含む監視エリアにおいて、監視物体を検知してもよい。また、作業機械100が、専ら、遠隔操作で使用される場合、物体検知部303の機能は、遠隔操作支援装置200(例えば、制御装置210(物体検知装置の一例))に移管されてもよい。この場合、通信装置60を通じて、撮像装置40や距離センサの出力が遠隔操作支援装置200に送信される。
物体検知部303は、例えば、作業機械100から見た水平方向(以下、単に「水平方向」)、つまり、作業機械100が作業している(下部走行体1が接地している)平面(以下、便宜的に「作業平面」)に沿う方向に延在する監視エリア内において、監視物体を検知する。具体的には、物体検知部303は、作業機械100の所定の部位からの距離Dが閾値Dth1以内の監視エリア内で監視物体を検知してよい。この際、閾値Dth1は、作業機械100の所定の部位から見た方向に依らず一定であってもよいし、作業機械100の所定部位から見た方向によって変化してもよい。例えば、ショベル100Aの物体検知部303は、上部旋回体3からの水平方向の距離Dが閾値Dth1(例えば、10メートル)以内の監視エリア内で、監視物体を検知する。また、クローラクレーン100Bの物体検知部303は、フックHK(或いは、吊り荷)からの水平方向の距離が閾値Dth1以内の監視エリア内で、監視物体を検知する。
例えば、物体検知部303は、既知の各種画像処理手法や人工知能(AI:Artificial Intelligence)等を含む機械学習ベースの識別器等を任意に適用することにより、撮像画像内の監視物体を認識する。また、監視物体が作業者等の人である場合、物体検知部303は、認識した人が予め登録される複数の登録済みの作業者の中の何れかに該当するかを特定してもよい。
また、物体検知部303は、既知の各種手法を適用することにより、単眼の撮像装置40の撮像画像に映っている、認識された監視物体が存在する位置(例えば、人の足元位置)(以下、「実在位置」)を判定(推定)してよい。
例えば、ショベル100Aの物体検知部303は、認識された監視物体の撮像画像上における大きさ(例えば、撮像画像上の高さ方向の大きさ)に基づき、上部旋回体3から見た水平方向の位置(以下、「水平位置」)を推定してよい。認識された監視物体の撮像画像上における大きさは、監視物体がショベル100A(上部旋回体3)から離れるほど小さくなる相関関係があるからである。具体的には、監視物体には、想定される大きさの範囲(例えば、想定される人の身長の範囲)があるため、想定された大きさの範囲に含まれる当該監視物体のショベル100Aから見た水平位置と、撮像画像上での大きさとの相関関係が予め規定されうる。そのため、物体検知部303は、例えば、コントローラ30の補助記憶装置等の内部メモリに予め格納される、撮像画像上の監視物体の大きさとショベル100Aから見た水平位置との相関関係を表すマップや変換式等に基づき、認識された監視物体の実在位置(上部旋回体3からの水平位置)を推定することができる。
また、例えば、物体検知部303は、監視物体が作業機械100(具体的には、下部走行体1)と同じ平面上に存在する前提の下、撮像画像の当該平面上への射影変換(ホモグラフィ)等によって、その実在位置(例えば、足元位置)を推定してもよい。この場合、撮像画像を構成するある部分(例えば、ある画素)は、作業機械100と同じ平面上のある位置に対応づけられる。
また、物体検知部303は、入力装置52に対するオペレータ等による所定の操作に応じて、その機能がON(有効)/OFF(無効)の間で切り替えられてもよい。
安全制御部304は、作業機械100の機能安全に関する制御を行う。具体的には、安全制御部304は、物体検知部303により監視対象が検知される場合に、安全機能を作動させてよい。
安全機能には、例えば、キャビン10の内部、キャビン10の外部、及び作業機械100の遠隔のオペレータや管理者等の少なくとも一つに対する警報等を出力し、監視対象の検知を報知する報知機能が含まれてよい。これにより、キャビン10の内部のオペレータ、作業機械100の周辺の作業者、作業機械100の遠隔操作や遠隔監視を行うオペレータや監視者等に対して、作業機械100の周辺の所定範囲内に監視対象が存在していることに関する注意を促すことができる。以下、キャビン10の内部(オペレータ等)への報知機能を「内部報知機能」、作業機械100の外部(作業者等)への報知機能を「外部報知機能」、及び作業機械100の遠隔操作や遠隔監視を行うオペレータや監視者への報知機能を「遠隔報知機能」とそれぞれ称し、区別する場合がある。
また、安全機能には、例えば、操作装置26の操作、遠隔操作、或いは自動運転機能に対応する操作指令に対する作業機械100の動作を制限する動作制限機能が含まれてよい。これにより、作業機械100の動作を強制的に制限し、作業機械100や吊り荷と周辺の物体との接近や接触等の可能性を低減させることができる。動作制限機能には、操作装置26の操作、遠隔操作、或いは自動運転機能に対応する操作指令に対する作業機械100の動作速度を通常よりも遅くする動作減速機能が含まれてよい。また、動作制限機能には、操作装置26の操作、遠隔操作、或いは自動運転機能に対応する操作指令に関わらず、作業機械100の動作を停止させ、停止状態を維持させる動作停止機能が含まれてもよい。
安全制御部304は、例えば、物体検知部303により監視エリアに含まれる所定の範囲(以下、「報知範囲」)で監視対象が検知される場合に、報知機能を作動させる。報知範囲は、監視エリアと同じ範囲、或いは、監視エリアよりもその外縁が上部旋回体3やフックHK(或いは吊り荷)に相対的に近くなるような範囲に設定される。具体的には、安全制御部304は、作業機械100の所定の部位からの距離Dが閾値Dth2(≦Dth1)以内の報知範囲内で監視物体が検知されると、報知機能を作動させてよい。この際、閾値Dth2は、作業機械100の所定の部位から見た方向に依らず一定であってもよいし、作業機械100の所定部位から見た方向によって変化してもよい。
安全制御部304は、例えば、出力装置50(音出力装置)を制御することにより、キャビン10の内部及び外部の少なくとも一方に対する音(即ち、聴覚的な方法)による内部報知機能や外部報知機能を作動させる。このとき、安全制御部304は、各種条件に応じて、出力される音の音高、音圧、音色、音を周期的に吹鳴させる場合の吹鳴周期、音声の内容等を異ならせてもよい。
また、安全制御部304は、例えば、視覚的な方法による内部報知機能を作動させる。具体的には、安全制御部304は、キャビン10の内部の出力装置50(表示装置)を制御することにより、表示装置に監視物体が検知されていることを表す画像を表示させてよい。また、安全制御部304は、キャビン10の内部の表示装置に表示される周辺画像に映っている監視物体や、検知された監視物体に対応する周辺画像上の位置を強調させてもよい。より具体的には、安全制御部304は、表示装置に表示されている周辺画像上に、検知されている監視物体を囲む枠を重畳して表示させたり、検知された監視物体の実在位置に対応する周辺画像上の位置にマーカを重畳して表示させたりしてよい。これにより、出力装置50(表示装置)は、オペレータに対する視覚的な報知機能を実現することができる。また、安全制御部304は、キャビン10の内部の警告灯や照明装置等を用いて、監視物体が検知されていることをキャビン10の内部のオペレータ等に対して通知してもよい。
また、安全制御部304は、例えば、上部旋回体3のハウス部の側面等に設けられる出力装置50(例えば、前照灯等の照明装置や表示装置)を制御することにより、視覚的な方法による外部報知機能を作動させてもよい。また、安全制御部304は、例えば、オペレータが着座する操縦席を振動させる振動発生装置を制御することにより、触覚的な方法で内部報知機能を作動させてもよい。これにより、コントローラ30は、オペレータや作業機械100の周辺の作業者及び監督者等に対して、作業機械100の周辺に監視物体(例えば、作業者等の人)が存在することを認識させることができる。そのため、コントローラ30は、オペレータに対して、作業機械100の周辺の安全状況の確認を促すことができると共に、監視エリア内の作業者等に対して、監視エリアからの退避を促すことができる。
また、安全制御部304は、例えば、通信装置60を通じて、報知機能の作動を示す指令信号を遠隔操作支援装置200に送信することにより、遠隔報知機能を作動させてもよい。この場合、遠隔操作支援装置200(制御装置210)は、通信装置220により作業機械100から指令信号を受信すると、出力装置230を通じて、視覚的な方法や聴覚的な方法による警報を出力してよい。これにより、遠隔操作支援装置200を通じて作業機械100の遠隔操作や遠隔監視を行うオペレータや監視者は、作業機械100の周辺の報知範囲内に監視物体が進入したことを把握することができる。
尚、安全制御部304の遠隔報知機能は、遠隔操作支援装置200(例えば、後述の報知制御部2103)に移管されてもよい。この場合、遠隔操作支援装置200は、作業機械100から物体検知部303による監視物体の検知状況に関する情報を受信し、受信した情報に基づき、報知範囲内への監視物体の進入の有無を判断し、報知範囲内に監視物体が存在する場合に、外部報知機能を作動させる。
また、安全制御部304は、報知範囲内で検知されている監視物体と、作業機械100との位置関係に応じて、報知態様(即ち、報知の仕方)を異ならせてもよい。
例えば、安全制御部304は、物体検知部303により報知範囲内で検知された監視物体が上部旋回体3やフックHK(或いは吊り荷)等の作業機械100の所定の部位に対して相対的に遠い位置に存在する場合、監視物体への注意を促す程度の相対的に緊急度が低い警報(以下、「注意レベルの警報」)を出力してよい。以下、報知範囲のうちの上部旋回体3やフックHK(或いは吊り荷)等の作業機械100の所定の部位に対する距離が相対的に遠い範囲、即ち、注意レベルの警報に対応する範囲を便宜的に「注意報知範囲」と称する場合がある。一方、安全制御部304は、物体検知部303により報知範囲内で検知された監視物体が上部旋回体3やフックHK(或いは吊り荷)等の作業機械100の所定の部位に対して相対的に近い位置に存在する場合、監視物体が作業機械100の所定の部位に接近し危険度が高まっていることを知らせる相対的に緊急度が高い警報(以下、「警戒レベルの警報」)を出力してよい。以下、報知範囲のうちの上部旋回体3やフックHK(或いは吊り荷)等の作業機械100の所定の部位に対する距離が相対的に近い範囲、即ち、警戒レベルの警報に対応する範囲を「警戒報知範囲」と称する場合がある。
この場合、安全制御部304は、注意レベルの警報と警戒レベルの警報との間で、出力装置(音出力装置)から出力される音の音高、音圧、音色、吹鳴周期等を異ならせてよい。また、安全制御部304は、注意レベルの警報と警戒レベルの警報との間で、出力装置50(表示装置)に表示される監視物体が検知されていることを表す画像や、表示装置に表示される周辺画像上の監視物体或いは監視物体の位置を強調させる画像(例えば、枠やマーカ等)の色、形状、大きさ、点滅の有無、点滅周期等を異ならせてよい。これにより、コントローラ30は、音出力装置から出力される報知音(警報音)や表示装置に表示される報知画像の相違によって、オペレータ等に緊急度、換言すれば、監視物体の作業機械100の所定の部位に対する接近度を把握させることができる。
安全制御部304は、報知機能の作動開始後、物体検知部303により検知されていた監視物体が監視エリア内で検知されなくなった場合、報知機能を停止させてよい。また、安全制御部304は、報知機能の作動開始後、入力装置52を通じて、報知機能の作動を解除する所定の操作が受け付けられた場合に、報知機能を停止させてもよい。
また、安全制御部304は、例えば、物体検知部303により監視エリアに含まれる所定範囲(以下、「動作制限範囲」)内で監視物体が検知される場合に、動作制限機能を作動させる。動作制限範囲は、上述の報知範囲よりもその外縁が上部旋回体3やフックHK(或いは吊り荷)等の作業機械100の所定の部位に相対的に近くなるような範囲に設定される。これにより、安全制御部304は、例えば、監視物体が外側から報知範囲に進入すると、まず、報知機能を作動させ、その後に、監視物体が内側の動作制限範囲に進入すると、更に、動作制限機能を作動させることができる。そのため、コントローラ30は、監視物体の監視エリア内での内側への移動に合わせて、段階的に、報知機能及び動作制限機能を作動させることができる。具体的には、安全制御部304は、作業機械100の所定の部位からの距離Dが閾値Dth3(<Dth2)以内の報知範囲内で監視物体が検知されると、報知機能を作動させてよい。この際、閾値Dth3は、作業機械100の所定の部位から見た方向に依らず一定であってもよいし、作業機械100の所定部位から見た方向によって変化してもよい。
また、動作制限範囲には、操作装置26の操作、遠隔操作、自動運転機能に対応する操作指令に対する作業機械100の動作速度を通常よりも遅くする動作減速範囲、及び操作装置26の操作、遠隔操作、自動運転機能に対応する操作指令に関わらず、作業機械100の動作を停止させ、停止状態を維持させる動作停止範囲の少なくとも一方が含まれる。例えば、動作制限範囲に動作減速範囲及び動作停止範囲の双方が含まれる場合、動作停止範囲は、動作制限範囲のうちの上部旋回体3やフックHK(或いは吊り荷)等の作業機械100の所定の部位に近接する範囲である。そして、動作減速範囲は、動作制限範囲のうちの動作停止範囲の外側に設定される範囲である。
安全制御部304は、油圧制御弁31を制御することにより、作業機械100の動作を制限する動作制限機能を作動させる。この場合、安全制御部304は、全ての被駆動要素(即ち、対応する油圧アクチュエータ)の動作を制限してもよいし、一部の被駆動要素(油圧アクチュエータ)の動作を制限してもよい。これにより、コントローラ30は、作業機械100の周辺に監視物体が存在する場合に、作業機械100の動作を減速させたり、停止させたりすることができる。そのため、コントローラ30は、作業機械100の周辺の監視物体と作業機械100や吊り荷との接触の発生を抑制することができる。また、安全制御部304は、パイロットライン25の図示しない電磁切換弁を制御し、パイロットライン25を遮断することにより、動作制限機能(動作停止機能)を作動させてもよい。
また、安全制御部304は、動作制限機能の作動開始後、物体検知部303により検知されていた監視物体が検知されなくなった場合、動作制限機能を停止させてよい。また、安全制御部304は、動作制限機能の作動開始後、入力装置52を通じて、動作制限機能の作動を解除する所定の操作が受け付けられた場合に、動作制限機能を停止させてもよい。入力装置52に対する報知機能の作動解除のための操作と、動作制限機能の作動解除のための操作とは、同じであってもよいし、異なっていてもよい。
また、安全制御部304は、入力装置52に対するオペレータ等による所定の操作に応じて、その機能がON(有効)/OFF(無効)の間で切り替えられてもよい。
<遠隔操作支援装置の構成>
図5に示すように、遠隔操作支援装置200は、制御装置210と、通信装置220と、出力装置230と、入力装置240とを含む。
制御装置210は、遠隔操作支援装置200に関する各種制御を行う。制御装置210の機能は、任意のハードウェア、或いは、任意のハードウェア及びソフトウェアの組み合わせ等により実現される。制御装置210は、例えば、CPU、RAM等のメモリ装置、ROM等の不揮発性の補助記憶装置、及び各種の入出力用のインタフェース装置等を含むコンピュータを中心に構成される。
制御装置210は、機能部として、遠隔操作支援部2101と、表示制御部2102と、報知制御部2103と、通信状況監視部2104と、操作状態監視部2105を含む。遠隔操作支援部2101、表示制御部2102、報知制御部2103、通信状況監視部2104、及び操作状態監視部2105の機能は、例えば、補助記憶装置にインストールされるプログラムをメモリ装置にロードしCPU上で実行することにより実現される。
通信装置220(外部装置用通信装置の一例)は、通信回線NWに接続し、遠隔操作支援装置200の外部(例えば、作業機械100)と通信を行う。
出力装置230(報知装置の一例)は、遠隔操作支援装置200のユーザに向けて各種情報を出力する。出力装置230は、表示装置230Aと、音出力装置230Bとを含む。
表示装置230Aは、制御装置210の制御下で、視覚的な方法で遠隔操作支援装置200のユーザに向けて遠隔操作支援装置200に関する各種情報を出力する。具体的には、表示装置230Aは、遠隔操作支援装置200に関する情報画像を表示する。表示装置230Aは、例えば、液晶ディスプレイや有機ELディスプレイ等を含む。
尚、出力装置230は、視覚的な方法で遠隔操作支援装置200のユーザに各種情報を出力する照明装置を含んでもよい。照明装置は、例えば、警告ランプ等を含む。
音出力装置230Bは、聴覚的な方法で遠隔操作支援装置200のユーザに各種情報を出力する音出力装置を含む。音出力装置は、例えば、ブザーやスピーカ等を含む。
入力装置240は、遠隔操作支援装置200のユーザからの入力を受け付け、入力(例えば、操作入力、音声入力、ジェスチャ入力等)の内容を表す信号を出力する。入力の内容を表す信号は、制御装置210に取り込まれる。遠隔操作支援装置200のユーザは、遠隔操作支援装置200の管理者、作業機械100のオペレータ、作業機械100の監視者等を含む。
入力装置240は、例えば、遠隔操作装置240Aを含む。
遠隔操作装置240Aは、オペレータによる作業機械100の遠隔操作や監視者による自動運転機能に対する介入による作業機械100の遠隔操作のために用いられる。遠隔操作装置240Aは、オペレータや監視者からの複数のアクチュエータ(被駆動要素)の遠隔操作のための入力を受け付け、入力の内容を表す信号を制御装置210に出力する。
遠隔操作支援部2101は、作業機械100の遠隔操作に関する制御を行う。具体的には、遠隔操作支援部2101は、遠隔操作装置240Aで受け付けられる作業機械100の遠隔操作に関する入力の信号を取り込み、通信装置220を用いて、作業機械100の遠隔操作の内容を表す遠隔操作信号を作業機械100に送信してよい。
表示制御部2102は、表示装置230Aを制御し、表示装置230Aに各種情報画像を表示させる。
表示制御部2102は、例えば、作業機械100からアップロードされる作業機械100の周辺の様子を表す画像(周辺画像)を表示装置230Aに表示させる。
具体的には、表示制御部2102は、撮像装置42の撮像範囲に対応する周辺画像を表示装置230Aに表示させる。これにより、遠隔操作支援装置200のユーザ(オペレータ)は、撮像装置42の撮像範囲に対応する周辺画像を視認することで、アタッチメントATの動きを確認しながら、作業機械100の遠隔操作を行うことができる。また、遠隔操作支援装置200のユーザ(監視者)は、撮像装置42の撮像範囲に対応する周辺画像を視認することで、アタッチメントATの動きを確認しながら、作業機械100の作業状況を監視することができる。
また、表示制御部2102は、撮像装置40の撮像範囲に対応する周辺画像を表示装置230Aに表示させる。これにより、遠隔操作支援装置200のユーザは、撮像装置40の撮像範囲に対応する周辺画像を視認することで、撮像装置42の撮像範囲に対応する周辺画像だけでは確認しにくい、作業機械100の周辺の状況を確認することができる。そのため、遠隔操作支援装置200は、作業機械100及び作業機械100が使用される作業現場の安全性を向上させることができる。
尚、表示制御部2102は、作業機械100からアップロードされる撮像装置40の撮像画像に基づき、自ら、周辺画像として加工画像を生成し、表示装置230Aに表示させてもよい。
報知制御部2103は、通信装置220を通じて、報知機能(遠隔報知機能)の作動を示す指令信号が受信される場合に、出力装置230を通じて、オペレータや監視者に対して作業機械100の周辺の報知範囲で監視物体が検知されたことを報知する。
報知制御部2103は、例えば、音出力装置230Bを制御することにより、聴覚的な方法でオペレータや監視者に対して作業機械100の周辺の報知範囲で監視物体が検知されたことを報知する。このとき、報知制御部2103は、各種条件に応じて、出力される音の音高、音圧、音色、音を周期的に吹鳴させる場合の吹鳴周期、音声の内容等を異ならせてもよい。
また、報知制御部2103は、例えば、視覚的な方法でオペレータや監視者に対して作業機械100の周辺の報知範囲で監視物体が検知されたことを報知する。具体的には、報知制御部2103は、表示制御部2102を通じて表示装置230Aを制御することにより、表示装置230Aに監視物体が検知されていることを表す画像を表示させてよい。また、報知制御部2103は、表示制御部2102を通じて、表示装置230Aに表示される周辺画像に映っている監視物体や、検知された監視物体に対応する周辺画像上の位置を強調させてもよい。より具体的には、報知制御部2103は、表示制御部2102を通じて、表示装置230Aに表示されている周辺画像上に、検知されている監視物体を囲む枠を重畳して表示させたり、検知された監視物体の実在位置に対応する周辺画像上の位置にマーカを重畳して表示させたりしてよい。これにより、表示装置230Aは、オペレータや監視者に対する視覚的な報知機能を実現することができる。また、報知制御部2103は、警告灯等の照明装置を用いて、監視物体が報知範囲内で検知されていることをオペレータや監視者に対して通知してもよい。
通信状況監視部2104は、作業機械100と遠隔操作支援装置200との間の通信状況を監視する。
具体的には、通信状況監視部2104は、作業機械100から受信される所定の信号の有無や所定の信号の送信から受信までの所要時間等に基づき、作業機械100と遠隔操作支援装置200との間の通信状況を監視する。作業機械100と遠隔操作支援装置200との間の通信状況には、例えば、作業機械100と遠隔操作支援装置200との間の通信途絶の発生状況が含まれる。また、作業機械100と遠隔操作支援装置200との間の通信状況には、例えば、作業機械100から遠隔操作支援装置200に信号が送信される場合の通信遅延の発生状況(通信遅延の大きさ)が含まれる。所定の信号は、例えば、通信状況監視部2104が通信装置220を通じて周期的に作業機械100に送信する応答を要求する信号に対する作業機械100からの返信の信号である。また、所定の信号は、例えば、作業機械100から定期的に送信(アップロード)されるデータ(例えば、周辺画像)に対応する信号であってもよい。これにより、通信状況監視部2104は、所定の信号の受信の有無により、通信途絶の発生の有無を監視することができる。また、通信状況監視部2104は、所定の信号に含まれる送信タイミングを表すデータ(タイムスタンプ)と、通信装置220を通じて実際に所定の信号を受信したときの時刻データとに基づき、通信遅延の大きさを計測することができる。
操作状態監視部2105は、遠隔操作装置240Aで受け付けられる入力状態に基づき、作業機械100のアクチュエータ(被駆動要素)の操作状態を監視する。
[報知範囲の設定処理]
次に、図8~図10を参照して、制御装置210による報知範囲の設定処理について説明する。
<報知範囲の設定処理の第1例>
図8は、制御装置210による報知範囲の設定処理の第1例を概略的に示すフローチャートである。本フローチャートは、作業機械100の稼働中、即ち、作業機械100の起動(例えば、キースイッチのオン)から作業機械100の停止(例えば、キースイッチオフ)までの間で、所定の周期ごとに繰り返し実行される。以下、後述の図9、図10のフローチャートについても同様であってよい。
図8に示すように、ステップS102にて、通信状況監視部2104は、上述の所定の信号の受信状況や所定の信号の送信から受信までのタイムラグ等に基づき、作業機械100と遠隔操作支援装置200との間の通信状況の監視を行う。
制御装置210は、ステップS102の処理が完了すると、ステップS104に進む。
通信状況監視部2104は、監視結果に基づき、作業機械100と遠隔操作支援装置200との間の通信遅延が所定基準を超えているか否かを判定する。通信状況監視部2104は、作業機械100と遠隔操作支援装置200との間の通信遅延が所定基準を超えていない場合、ステップS106に進み、所定基準を超えている場合、ステップS108に進む。
ステップS106にて、通信状況監視部2104は、安全制御部304による報知機能の報知範囲をデフォルトの状態に設定する。
制御装置210は、ステップS106の処理が完了すると、ステップS110に進む。
一方、ステップS108にて、通信状況監視部2104は、安全制御部304による報知機能の報知範囲をデフォルトより外側に拡大した状態に設定する。
例えば、作業機械100と遠隔操作支援装置200との間の通信遅延が大きくなると、撮像装置40等によって作業機械100の周辺の報知範囲で監視物体が捉えられてから、遠隔操作支援装置200で報知機能が作動するまでのタイムラグが大きくなる。そのため、遠隔操作支援装置200で報知機能が作動し、オペレータや監視者が監視物体の存在を確認したときには、監視物体が報知範囲の内側に移動し、作業機械100や吊り荷等に更に接近してしまう可能性がある。そのため、作業機械100や作業現場の安全性が低下する可能性がある。
一方、例えば、自動車の場合(例えば、特開2016-71585等参照)のように、作業機械100と遠隔操作支援装置200との間の通信遅延が大きくなると、自動的に、動作制限機能を作動させ、安全性を確保することも可能である。
しかしながら、自動車は、相対的に高い速度での移動が主たる機能であり、安全性の確保のためにはその減速や停止が必須である一方、作業機械は、相対的に狭い範囲での作業が主たる機能であり、一律に減速や停止が必要でない場合があり得る。そのため、一律に動作制限機能を作動させると、それほど安全性が低下していないような状況でも作業機械100の動作が減速或いは停止されてしまう可能性がある。その結果、作業機械100の安全性と作業機械100の作業性との両立の観点で問題がある。
また、例えば、作業機械100と遠隔操作支援装置200との間の通信遅延が大きくなると、監視物体が作業機械100の周辺の監視エリアで検知されている場合に限定して、動作制限機能を作動させることも可能である。
しかしながら、監視物体が作業機械100の周辺の監視エリアで検知されている場合でも、例えば、その監視物体が監視エリアの外縁付近を移動しているだけの状況等、それほど安全性が低下していないような場合も存在しうる。そのため、監視物体が作業機械100の周辺の監視エリアで検知された場合に限定して、作業機械100の動作制限機能を作動させるだけでは、作業機械100の作業性の確保の観点で十分でない可能性がある。
これらに対して、本例では、制御装置210は、報知範囲をデフォルトよりも外側に拡大させることができる。そのため、制御装置210は、作業機械100と遠隔操作支援装置200との間の通信遅延が大きい状況でも、監視物体が作業機械や吊り荷等の相対的に近い範囲に接近する前に、遠隔操作支援装置200で報知機能を作動させることができる。よって、制御装置210は、作業機械100の作業性(作業効率)の低下を抑制しつつ、作業機械100の安全性を向上させることができる。
例えば、通信状況監視部2104は、予め規定された量或いは比率だけ報知範囲の外縁を外側に拡大した状態に設定する。この際、報知範囲の外縁の拡大量や拡大率は、一律であってもよいし、場所によって、異なっていてもよく、拡大される場所と拡大されない場所とが存在してもよい。
また、例えば、通信状況監視部2104は、作業機械100と遠隔操作支援装置200との間の通信遅延の大きさが大きくなるほど、変化量(拡大量)が大きくなるように報知範囲の外縁を外側に拡大した状態に設定してもよい。
制御装置210は、ステップS108の処理が完了すると、ステップS110に進む。
ステップS110にて、通信状況監視部2104は、通信装置220を通じて、ステップS106或いはステップS108で設定した報知範囲に設定するように要求する信号を作業機械100に送信する。その結果、コントローラ30(安全制御部304)は、通信装置60を通じて遠隔操作支援装置200から受信される信号に応じて、報知範囲を設定する。これにより、制御装置210は、ステップS106,S108の設定内容を作業機械100での実際の報知機能に関する制御に反映させることができる。
制御装置210は、ステップS110の処理が完了すると、今回のフローチャートの処理を終了する。
<報知範囲の設定処理の第2例>
図9は、制御装置210による報知範囲の設定処理の第2例を概略的に示すフローチャートである。
図9に示すように、ステップS202,S204は、図8のステップS102,S104と同じであるため、説明を省略する。
ステップS204にて、通信状況監視部2104は、作業機械100と遠隔操作支援装置200との間の通信遅延が所定基準を超えていない場合、ステップS206に進み、所定基準を超えている場合、ステップS208に進む。
ステップS206は、図8のステップS106の処理と同じであるため、説明を省略する。
制御装置210は、ステップS206の処理が完了すると、ステップS212に進む。
一方、ステップS208にて、操作状態監視部2105は、遠隔操作装置240Aの入力状態に基づき、作業機械100の操作状態を監視する。
制御装置210は、ステップS208の処理が完了すると、ステップS210に進む。
ステップS210にて、通信状況監視部2104は、ステップS202の監視結果に基づき、作業機械100の操作状態に合わせて、安全制御部304による報知機能の報知範囲をデフォルトより外側に拡大した状態に設定する。
例えば、通信状況監視部2104は、遠隔操作装置240Aを通じて下部走行体1の走行操作が行われている場合、報知範囲の外縁のうちの作業機械100の走行方向の外縁部分を他の方向の外縁部分よりも相対的に大きく外側の拡大した状態に設定してよい。作業機械100が移動することによって、作業機械100の移動方向(走行方向)に存在する監視物体と作業機械100との距離が相対的に小さくなるからである。
また、例えば、通信状況監視部2104は、遠隔操作装置240Aを通じて上部旋回体3の旋回操作が行われている場合、報知範囲の外縁のうちのアタッチメントATの向きを基準とする旋回軸回りで旋回方向の外縁部分を、旋回方向と逆方向の外縁部分よりも相対的に大きく外側に拡大した状態に設定してよい。作業機械100が旋回することによって、旋回軸回りで旋回方向に存在する監視物体とアタッチメントATとの距離が相対的に小さくなるからである。
制御装置210は、ステップS210の処理が完了すると、ステップS212に進む。
ステップS212にて、通信状況監視部2104は、通信装置220を通じて、ステップS206或いはステップS210で設定した報知範囲に設定するように要求する信号を作業機械100に送信する。その結果、コントローラ30(安全制御部304)は、通信装置60を通じて遠隔操作支援装置200から受信される信号に応じて、報知範囲を設定する。これにより、制御装置210は、ステップS206,S210の設定内容を作業機械100での実際の報知機能に関する制御に反映させることができる。
<報知範囲の設定処理の第3例>
図10は、制御装置210による報知範囲の設定処理の第3例を概略的に示すフローチャートである。
図10に示すように、ステップS302,S304は、図8のステップS102,S104の処理と同じであるため、説明を省略する。
ステップS304にて、通信状況監視部2104は、作業機械100と遠隔操作支援装置200との間の通信遅延が所定基準を超えていない場合、ステップS306に進み、所定基準を超えている場合、ステップS308に進む。
ステップS306は、図8のステップS106の処理と同じであるため、説明を省略する。
制御装置210は、ステップS306の処理が完了すると、ステップS314に進む。
一方、ステップS308にて、通信状況監視部2104は、作業機械100の物体検知部303により監視物体が検知されているか否かを判定する。通信状況監視部2104は、通信装置220を通じて作業機械100から逐次受信される物体の検知状況を表すデータに基づき、監視物体の検知の有無を判定することができる。通信状況監視部2104は、物体検知部303により監視物体が検知されている場合、ステップS310に進み、監視物体が検知されていない場合、ステップS312に進む。
ステップS310にて、通信状況監視部2104は、検知されている監視物体の位置及び移動状況の少なくとも一方に応じて報知範囲の外縁をデフォルトより外側に拡大した状態に設定する。
例えば、通信状況監視部2104は、報知範囲の外縁のうちの検知されている監視物体の位置している方向の外縁部分を他の方向の外縁部分よりも大きく外側に変化させてよい。監視物体が報知範囲の内側に向かって移動する可能性があるからである。
また、例えば、通信状況監視部2104は、監視物体が報知範囲の内側に向かって移動している場合、監視物体が報知範囲の内側に向かって移動していない場合よりも報知範囲の外側に大きく変化させてもよい。報知範囲の内側に向かって移動してくる監視物体の存在をより早いタイミングでオペレータや監視者に通知する必要があるからである。
また、例えば、通信状況監視部2104は、監視物体の移動速度が相対的に大きい場合、監視物体の移動速度が相対的に小さい場合よりも報知範囲の外縁を外側に大きく変化させてもよい。報知範囲の内側により速く移動してくる監視物体をより早いタイミングでオペレータや監視者に通知する必要があるからである。
制御装置210は、ステップS310の処理が完了すると、ステップS314に進む。
一方、ステップS312にて、通信状況監視部2104は、監視物体が検知されている場合よりも変化の程度(変化量或いは変化率)が相対的に小さくなるように、報知範囲の外縁をデフォルトよりも外側に拡大した状態に設定する。
制御装置210は、ステップS312の処理が完了すると、ステップS314に進む。
ステップS314にて、通信状況監視部2104は、通信装置220を通じて、ステップS306、ステップS310、或いはステップS312で設定した報知範囲に設定するように要求する信号を作業機械100に送信する。その結果、コントローラ30(安全制御部304)は、通信装置60を通じて遠隔操作支援装置200から受信される信号に応じて、報知範囲を設定する。これにより、制御装置210は、ステップS306,S310,S312の設定内容を作業機械100での実際の報知機能に関する制御に反映させることができる。
[監視画面の具体例]
次に、図11~図14を参照して、表示装置230Aに表示される、作業機械100の周辺画像を含む画面(以下、「監視画面」)の具体例について説明する。
<通信遅延が相対的に小さい場合の監視画面>
図11、図12は、表示装置230Aに表示される、作業機械100の周辺画像を含む監視画面の一例を示す図である。具体的には、図11、図12は、通信状況監視部2104により作業機械100と遠隔操作支援装置200との間の通信遅延が所定基準以下であると判断される場合の監視画面の具体例を示す図である。より具体的には、図11は、表示装置230Aに表示される、撮像装置40の撮像範囲に対応するショベル100Aの周辺画像を含む監視画面の一例(監視画面1100)を示す図である。図12は、表示装置230Aに表示される、撮像装置40の撮像範囲に対応するクローラクレーン100Bの周辺画像を含む監視画面の一例(監視画面1200)を示す図である。
尚、本例の場合、図11、図12の監視画面1100,1200とは別に、撮像装置42の撮像画像や当該撮像画像に基づき生成される加工画像が表示装置230Aの別の表示領域、或いは、複数の表示装置230Aのうちの他の表示装置230Aに表示される。以下、後述の図13、図14の監視画面1300,1400が表示装置230Aに表示される場合についても同様である。
例えば、図11に示すように、表示装置230Aには、表示制御部2102の制御下で、ショベル画像CGと、ショベル画像CGの周辺に配置される、ショベル100Aの周辺画像としての視点変換画像EPとを含む監視画面1100が表示される。ショベル画像CG及び視点変換画像EPは、ショベル100A(上部旋回体3)と撮像装置40(カメラ40B,40L,40R)の撮像範囲との間の位置関係に合わせて配置される。これにより、オペレータは、監視画面1100を通じて、ショベル100Aと、視点変換画像EPに映っているショベル100Aの周辺の物体との位置関係を適切に把握することができる。
本例では、視点変換画像EPは、ショベル100Aに隣接する周辺領域を真上から見た俯瞰画像BVPと、当該俯瞰画像BVPの周りに配置される、ショベル100Aから当該周辺領域を水平方向に見た水平画像HVPとの組み合わせで構成される。視点変換画像EPは、カメラ40B,40L,40Rのそれぞれの撮像画像を空間モデルに投影した上で、その空間モデルに投影された投影画像を別の二次元平面に再投影することにより得られる。空間モデルは、仮想空間における撮像画像の投影対象であり、撮像画像が位置する平面以外の平面或いは曲面を含む一又は複数の平面或いは曲面で構成される。
また、本例では、監視画面1100の視点変換画像EPには、ショベル100Aからの一定距離のラインLN1が重畳して表示される。ラインLN1は、例えば、安全制御部304による報知範囲の外縁を表してよい。これにより、オペレータや監視者は、ショベル100Aと視点変換画像EPに映っている周辺の物体との距離の関係を適切に把握することができる。
また、本例では、監視画面1100の視点変換画像EPには、ショベル画像CGの後方に相当する場所に作業者Wが映っている。これにより、オペレータや監視者は、ショベル100A(上部旋回体3)の後方に作業者Wが位置(存在)していることを認識することができる。
本例では、作業者Wは、報知範囲の外縁に相当するラインLN1の外側に存在している。そのため、作業者Wは、視覚的な報知機能の作動対象にはなっておらず、作業者Wの存在を強調する画像(例えば、後述の枠FRM1)等は表示されていない。
尚、表示制御部2102は、カメラ40B,40L,40Rのうちの少なくとも一つの撮像画像を含む監視画面を表示装置230Aに表示させてもよい。つまり、表示制御部2102は、カメラ40B,40L,40Rのうちの全ての撮像画像或いは二つのカメラの撮像画像を表示装置230Aに並べて表示させてもよいし、何れか一つのカメラの撮像画像を表示装置230Aに表示させてもよい。典型的には、表示制御部2102は、カメラ40B,40Rの撮像画像を表示装置230Aに並べて表示させてよい。この場合、表示制御部2102は、視点変換画像EPの場合と同様、表示装置230Aのカメラ40B,40L,40Rの撮像画像を含む監視画面に監視エリアや報知範囲等の外縁を表すラインを重畳して表示させてよい。
また、例えば、図12に示すように、表示装置230Aには、表示制御部2102の制御下で、クローラクレーン100Bの周辺画像としての撮像装置40の撮像画像を含む監視画面1200が表示される。
監視画面1200(撮像装置40の撮像画像)には、主巻ロープ7Bの先端のフックHKと、フックHKに玉掛けされた吊り荷SLが映っている。
また、本例では、監視画面1200には、吊り荷SLからの一定距離のラインLN2が重畳して表示される。ラインLN2は、例えば、安全制御部304による報知範囲等の外縁を表す。これにより、オペレータや監視者は、吊り荷SLと監視画面1200(撮像装置40の撮像画像)に映っている周辺の物体との位置関係を適切に把握することができる。
また、本例では、監視画面1200には、吊り荷SLの周辺の2つの障害物OBが映っている。これにより、オペレータや監視者は、吊り荷SLの周辺に2つの障害物OBが存在していることを認識することができる。
本例では、2つの障害物OBは、共に、報知範囲の外縁を表すラインLN1よりも外側に存在している。そのため、2つの障害物OBは、共に、視覚的な報知機能の作動対象になっておらず、障害物OBの存在を強調する画像(例えば、後述の枠FRM2)等は表示されていない。
尚、表示制御部2102は、周辺画像として、クローラクレーン100Bの撮像装置40の撮像画像に基づき生成される視点変換画像を表示装置230Aに表示させてもよい。
<通信遅延が相対的に大きい場合の監視画面>
図13、図14は、表示装置230Aに表示される、作業機械100の周辺画像を含む監視画面の他の例を示す図である。具体的には、図13、図14は、通信状況監視部2104により作業機械100と遠隔操作支援装置200との間の通信遅延が所定基準を超えていると判断される場合の監視画面の具体例を示す図である。より具体的には、図13は、表示装置230Aに表示される、撮像装置40の撮像範囲に対応するショベル100Aの周辺画像を含む監視画面の他の例(監視画面1300)を示す図である。図14は、表示装置230Aに表示される、撮像装置40の撮像範囲に対応するクローラクレーン100Bの周辺画像を含む監視画面の一例(監視画面1400)を示す図である。
例えば、図13に示すように、表示装置230Aには、上述の一例(図11)の場合と同様、表示制御部2102の制御下で、ショベル画像CGと、ショベル100Aの周辺画像としての視点変換画像EPとを含む監視画面1300が表示される。
また、本例では、監視画面1300の視点変換画像EPには、上述の一例の場合と同様、報知範囲の外縁に相当するラインLN1が重畳して表示される。
本例では、ラインLN1は、上述の一例の場合よりも外側、即ち、ショベル画像CGから離れる方向に一律に変化している。ショベル100Aと遠隔操作支援装置200との間の通信遅延が所定基準を超えているからである。これにより、制御装置210は、表示装置230Aを通じて、報知範囲の外縁が通常時(通信遅延が相対的に小さい場合)よりも外側に変化していることを把握させることができる。また、制御装置210は、表示装置230A(監視画面1300)上でラインLN1が通常時よりも外側に移動していることを通じて、ショベル100Aと遠隔操作支援装置200との間の通信遅延が相対的に大きくなっていることを把握させることができる。
また、本例では、監視画面1300の視点変換画像EPには、上述の一例の場合と同様、ショベル画像CGの後方に相当する場所に作業者Wが映っている。
また、本例では、監視画面1300の視点変換画像EPには、作業者Wを囲む枠FRM1が重畳して表示される。報知範囲の外縁が外側に変化することで、作業者WがラインLN1の内側に存在するようになったからである。これにより、作業者Wが撮像装置40で捉えられてから遠隔操作支援装置200で報知機能が作動するまでのタイムラグが相対的に大きい状況において、より早いタイミングで作業者Wの存在をオペレータや監視者に把握させることができる。
尚、報知範囲の外縁に相当するラインLN1の上述の一例に対する変化の態様は、上述の如く、ショベル100Aの操作状態に応じて可変されてもよい。例えば、ショベル100Aが上部旋回体3の後方に向かって走行操作される場合、ラインLN1の上述の一例の場合に対する変化の程度は、ショベル画像CGの左側や右側の部分(直線部分)よりもショベル画像CGの後方(下側)の部分(曲線部分)の方が大きくされてよい。また、例えば、ショベル100Aの上部旋回体3が右方向に旋回操作されている場合、ラインLN1の上述の一例の場合に対する変化の程度は、ショベル画像CGの左側の部分よりも右側の部分の方が大きくされてよい。また、報知範囲の外縁に相当するラインLN1の上述の一例に対する変化の態様は、上述の如く、ショベル100Aの周辺の監視物体(作業者W)の位置や移動状況に応じて可変されてもよい。例えば、ラインLN1の上述の一例の場合に対する変化の程度は、作業者Wの存在するショベル画像CGの後方(下側)の部分の方が作業者Wの存在しないショベル画像CGの左側や右側よりも大きくされてよい。また、例えば、ラインLN1の上述の一例に対する変化の程度は、作業者Wがショベル100Aに向かって移動している場合、作業者Wがショベル100Aに向かって移動していない場合よりも大きくされてよい。また、例えば、ラインLN1の上述の一例に対する変化の程度は、作業者Wの移動速度が相対的に大きい場合、相対的に小さい場合よりも大きくされてもよい。
また、本例では、監視画面1300には、ショベル100Aと遠隔操作支援装置200との間で相対的に大きな通信遅延が生じている旨のメッセージを表す画像MSG1が表示される。これにより、オペレータや監視者は、ショベル100Aと遠隔操作支援装置200との間に相対的に大きな通信遅延が生じていること、及び、その通信遅延の影響で、ラインLN1が通常時から変化していること等を把握することができる。
また、例えば、図14に示すように、表示装置230Aには、上述の一例(図12)の場合と同様、表示制御部2102の制御下で、クローラクレーン100Bの周辺画像としての撮像装置40の撮像画像を含む監視画面1400が表示される。
監視画面1400(撮像装置40の撮像画像)には、上述の一例の場合と同様、主巻ロープ7Bの先端のフックHKと、フックHKに玉掛けされた吊り荷SLが映っている。
また、本例では、監視画面1200には、上述の一例の場合と同様、報知範囲の外縁を表すラインLN2が重畳して表示される。
本例では、ラインLN2は、上述の一例の場合よりも外側、即ち、吊り荷SL(フックHK)から離れる方向に変化している。クローラクレーン100Bと遠隔操作支援装置200との間の通信遅延が所定基準を超えているからである。これにより、制御装置210は、表示装置230Aを通じて、報知範囲の外縁が通常時(通信遅延が相対的に小さい場合)よりも外側に変化していることを把握させることができる。また、制御装置210は、表示装置230A(監視画面1400)上でラインLN2が通常時よりも外側に移動していることを通じて、ショベル100Aと遠隔操作支援装置200との間の通信遅延が相対的に大きくなっていることを把握させることができる。
また、本例では、監視画面1400には、上述の一例の場合と同様、吊り荷SLの周辺の2つの障害物OBが映っている。
また、本例では、監視画面1400には、2つの障害物OBのそれぞれを囲む枠FRM2が重畳して表示される。報知範囲の外縁が外側に変化することで、障害物OBがラインLN2の内側に存在するようになったからである。これにより、障害物OBが撮像装置40で捉えられてから遠隔操作支援装置200で報知機能が作動するまでのタイムラグが相対的に大きい状況において、より早いタイミングで障害物OBの存在をオペレータや監視者に把握させることができる。
尚、報知範囲の外縁に相当するラインLN2の上述の一例に対する変化の態様は、上述の如く、クローラクレーン100Bの操作状態に応じて可変されてもよい。例えば、クローラクレーン100Bが上部旋回体3の前方に向かって走行操作される場合、ラインLN2の上述の一例の場合に対する変化の程度は、フックHK(吊り荷SL)の左側、右側、及び後側の部分よりも前側の部分の方が大きくされてよい。また、例えば、クローラクレーン100Bの上部旋回体3が右方向に旋回操作されている場合、ラインLN2の上述の一例の場合に対する変化の程度は、フックHK(吊り荷SL)の左側の部分よりも右側の部分の方が大きくされてよい。また、報知範囲の外縁に相当するラインLN2の上述の一例に対する変化の態様は、上述の如く、クローラクレーン100Bの周辺の監視物体(障害物OB)の位置や移動状況に応じて可変されてもよい。例えば、ラインLN2の上述の一例の場合に対する変化の程度は、障害物OBの存在するフックHK(吊り荷SL)の前側や後側の部分の方が障害物OBの存在しないフックHK(吊り荷SL)の左側や右側よりも大きくされてよい。また、例えば、ラインLN2の上述の一例に対する変化の程度は、障害物OBがフックHK(吊り荷SL)向かって相対的に移動している場合、障害物OBがフックHK(吊り荷SL)に向かって相対的に移動していない場合よりも大きくされてよい。また、例えば、ラインLN2の上述の一例に対する変化の程度は、障害物OBのフックHK(吊り荷SL)に対する相対的な移動速度が相対的に大きい場合、相対的に小さい場合よりも大きくされてもよい。
また、本例では、監視画面1400には、クローラクレーン100Bと遠隔操作支援装置200との間で相対的に大きな通信遅延が生じている旨のメッセージを表す画像MSG2が表示される。これにより、オペレータや監視者は、クローラクレーン100Bと遠隔操作支援装置200との間に相対的に大きな通信遅延が生じていること、及び、その通信遅延の影響で、ラインLN2が通常時から変化していること等を把握することができる。
[作用]
次に、本実施形態に係る遠隔操作支援システムSYSの作用について説明する。
本実施形態では、作業機械100の撮像装置40は、作業機械100の周辺の物体に関するデータ(画像データ)を取得する。また、作業機械100の通信装置60は、遠隔操作支援装置200と通信を行う。また、遠隔操作支援装置200の通信装置220は、作業機械100と通信を行う。遠隔操作支援装置200の遠隔操作装置240Aは、作業機械100を遠隔操作するための入力を受け付ける。また、作業機械100のコントローラ30、或いは、遠隔操作支援装置200の制御装置210は、撮像装置40の出力に基づき、作業機械100の周辺の監視物体を検知する。また、出力装置230は、遠隔操作支援装置200に設けられ、制御装置210の制御下で、コントローラ30或いは制御装置210により監視物体が作業機械100の周辺の報知範囲内で検知された場合、遠隔操作装置240Aを利用するユーザにその旨を報知する。そして、遠隔操作支援システムSYSは、作業機械100と遠隔操作支援装置200との間の通信遅延が相対的に大きい場合、通信遅延が相対的に小さい場合よりも報知範囲の外縁を外側に変化させる。
これにより、遠隔操作支援システムSYSは、報知範囲の内側の安全性が低下しうる範囲に進入してくるよりもある程度早い段階で監視物体を報知機能の作動対象とすることができる。そのため、遠隔操作支援システムSYSは、監視物体が撮像装置40で捉えられてから遠隔操作支援装置200で報知機能が作動するまでのタイムラグが通信遅延により相対的に大きい状況でも、監視物体が報知範囲の内側の安全性が相対的に低下しうる範囲に進入する前に、監視者やオペレータに監視物体の存在を報知することができる。よって、作業機械100の安全性を向上させることができる。また、オペレータや監視者が報知機能の作動に応じて、表示装置230Aに表示される監視画面等を確認し、作業機械100の動作継続或いは動作停止を自ら判断することができる。そのため、作業機械100と遠隔操作支援装置200との間の通信遅延が相対的に大きくなると、一律に動作制限機能が作動したり、動作制限範囲が外側に拡大されたりする場合のように、作業機械100の作業性が大きく低下するような事態を抑制することができる。よって、遠隔操作支援システムSYSは、作業機械100の作業性(作業効率)の低下を抑制しつつ、作業機械100の安全性を向上させることができる。
また、本実施形態では、遠隔操作支援システムSYSは、上述の通信遅延が相対的に大きい場合、遠隔操作装置240Aに対するユーザの入力内容に応じて、報知範囲の外縁を外側に変化させてよい。
これにより、遠隔操作支援システムSYSは、上述の通信遅延が相対的に大きい状況で、遠隔操作装置240Aを通じた作業機械100の操作状態に合わせて、報知範囲の外縁のうちの安全性に影響のある外縁部分を中心に外側に変化させることができる。そのため、遠隔操作支援システムSYSは、作業機械100の安全性と作業機械100の作業性とをより適切に両立させることができる。
また、本実施形態では、遠隔操作支援システムSYSは、上述の通信遅延が相対的に大きい場合、遠隔操作装置240Aを通じて作業機械100の走行操作が行われているときに、作業機械100から見て走行している方向の報知範囲の外縁を他の方向の報知範囲の外縁よりも外側に大きく変化させてよい。
これにより、遠隔操作支援システムSYSは、遠隔操作装置240Aを通じた作業機械100の操作状態に合わせて、具体的に、報知範囲の外縁のうちの作業機械100の安全性に影響のある外縁部分を中心に外側に変化させることができる。
また、本実施形態では、遠隔操作支援システムSYSは、上述の通信遅延が相対的に大きい場合、遠隔操作装置240Aを通じて作業機械100の旋回操作が行われているときに、旋回軸回りで作業アタッチメントの向きを基準とする旋回方向にある報知範囲の外縁を旋回方向と反対方向にある報知範囲の外縁よりも外側に大きく変化させる。
これにより、遠隔操作支援システムSYSは、遠隔操作装置240Aを通じた作業機械100の操作状態に合わせて、具体的に、報知範囲の外縁のうちの作業機械100の安全性に影響のある外縁部分を中心に外側に変化させることができる。
また、本実施形態では、遠隔操作支援システムSYSは、上述の通信遅延が相対的に大きい場合、作業機械100の周辺に存在する監視物体の位置及び移動状況の少なくとも一方に応じて、報知範囲の外縁を変化させる。
これにより、遠隔操作支援システムSYSは、監視物体の位置や移動状況に合わせて、報知範囲の外縁のうちの安全性に影響のある外縁部分を中心に外側に変化させることができる。そのため、遠隔操作支援システムSYSは、作業機械100の安全性と作業機械100の作業性とをより適切に両立させることができる。
また、本実施形態では、遠隔操作支援システムSYSは、通信遅延が相対的に大きい場合、作業機械100から見て監視物体が位置している方向の報知範囲の外縁を、他の方向の報知範囲の外縁よりも外側に大きく変化させてよい。
これにより、遠隔操作支援システムSYSは、監視物体の位置に合わせて、具体的に、報知範囲の外縁のうちの安全性に影響のある外縁部分を中心に外側に変化させることができる。
また、本実施形態では、遠隔操作支援システムSYSは、通信遅延が相対的に大きい場合、監視物体が報知範囲の内側に向かって移動しているときに、監視物体が報知範囲の内側に向かって移動していないときよりも報知範囲の外縁を外側に大きく変化させてもよい。
これにより、遠隔操作支援システムSYSは、監視物体の移動状況に合わせて、具体的に、報知範囲の外縁のうちの安全性に影響のある外縁部分を中心に外側に変化させることができる。
また、本実施形態では、遠隔操作支援システムSYSは、通信遅延が相対的に大きい場合、監視物体の移動速度が相対的に大きいときに、監視物体の移動速度が相対的に小さいときよりも所定の範囲の外縁を外側に大きく変化させてもよい。
これにより、遠隔操作支援システムSYSは、監視物体の移動状況に合わせて、具体的に、報知範囲の外縁のうちの安全性に影響のある外縁部分を中心に外側に変化させることができる。
また、本実施形態では、表示装置230Aは、報知範囲の外縁の変化に応じて表示内容が変化するように、報知範囲に関する情報を表示してもよい。
これにより、遠隔操作支援システムSYSは、表示装置230Aを通じて、上述の通信遅延の増大に伴う報知範囲の外縁の変化をオペレータや監視者に把握させることができる。
以上、実施形態について詳述したが、本開示はかかる特定の実施形態に限定されるものではなく、特許請求の範囲に記載された要旨の範囲内において、種々の変形・変更が可能である。