JP7617817B2 - 運転支援装置、監視装置、運転支援方法、およびプログラム - Google Patents
運転支援装置、監視装置、運転支援方法、およびプログラム Download PDFInfo
- Publication number
- JP7617817B2 JP7617817B2 JP2021107578A JP2021107578A JP7617817B2 JP 7617817 B2 JP7617817 B2 JP 7617817B2 JP 2021107578 A JP2021107578 A JP 2021107578A JP 2021107578 A JP2021107578 A JP 2021107578A JP 7617817 B2 JP7617817 B2 JP 7617817B2
- Authority
- JP
- Japan
- Prior art keywords
- value
- control
- moving body
- output
- yaw rate
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/09—Taking automatic action to avoid collision, e.g. braking and steering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/20—Conjoint control of vehicle sub-units of different type or different function including control of steering systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/02—Control of vehicle driving stability
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
- B60W40/06—Road conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/10—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to vehicle motion
- B60W40/114—Yaw movement
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/06—Direction of travel
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/14—Yaw
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- Human Computer Interaction (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Traffic Control Systems (AREA)
Description
(1):この発明の一態様に係る運転支援装置は、移動体の周辺に存在する物体を認識する認識部と、前記移動体と前記認識された物体との接触を操舵により回避するための第1制御を行う第1運転支援部と、前記移動体と前記認識された物体との接触を制動により回避するための第2制御を行う第2運転支援部と、前記移動体に搭載されたヨーレートセンサにより出力されるヨーレートの測定値とは異なる複数種類の情報を少なくとも含む参照情報に基づいて、前記移動体に生じたヨーレートの推定値を導出し、前記測定値と前記推定値との乖離が基準よりも大きい場合に前記第1制御を抑制する管理部と、を備えるものである。
以下、第1実施形態について説明する。図1は、運転支援装置100を中心とした構成図である。車両Mには、運転支援装置100の他、カメラ10、レーダ装置12、LIDAR(Light Detection and Ranging)14、物体認識装置16、車両センサ40、制御装置50、HMI(Human Machine Interface)60、ブレーキ装置70等が搭載される。これらの装置や機器は、CAN(Controller Area Network)通信線等の多重通信線やシリアル通信線、無線通信網等によって互いに接続される。なお、図1に示す構成はあくまで一例であり、構成の一部が省略されてもよいし、更に別の構成が追加されてもよい。例えば、車両Mには、アクセルペダルやブレーキペダル等の運転操作子、エンジンやモータ等の駆動力出力装置、ステアリング装置等の手動運転に必要な構成も搭載されてよいが、これらについては図示および詳細な説明を省略する。
以下、第2実施形態について説明する。第1実施形態では、学習済モデル172として一つのモデルを使用するものとしたが、第2実施形態では、条件を互いに異ならせて学習された複数の学習済モデルを使用する。
プログラムを記憶した記憶装置と、
ハードウェアプロセッサと、を備え、
前記ハードウェアプロセッサが前記記憶装置に記憶されたプログラムを実行することにより、
移動体の周辺に存在する物体を認識し、
前記移動体と前記認識された物体との接触を操舵により回避するための第1制御を行い、
前記移動体と前記認識された物体との接触を制動により回避するための第2制御を行い、
前記移動体に搭載されたヨーレートセンサにより出力されるヨーレートの測定値とは異なる複数種類の情報を少なくとも含む参照情報に基づいて、前記移動体に生じたヨーレートの推定値を導出し、前記測定値と前記推定値との乖離が基準よりも大きい場合に前記第1制御を抑制する、
ように構成されている、運転支援装置。
110 認識部
120 第1運転支援部
130 第2運転支援部
150 管理部(監視装置)
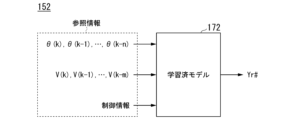
152 導出部
154 比較部
170 記憶部
172 学習済モデル
Claims (7)
- 移動体の周辺に存在する物体を認識する認識部と、
前記移動体と前記認識された物体との接触を操舵により回避するための第1制御を行う第1運転支援部と、
前記移動体と前記認識された物体との接触を制動により回避するための第2制御を行う第2運転支援部と、
前記移動体に搭載されたヨーレートセンサにより出力されるヨーレートの測定値とは異なる複数種類の情報を少なくとも含む参照情報に基づいて、前記移動体に生じたヨーレートの推定値を導出し、前記測定値と前記推定値との乖離が基準よりも大きい場合に前記第1制御を抑制する管理部と、を備え、
前記管理部は、前記参照情報を入力すると前記推定値を出力するように学習された学習済モデルとして、条件を互いに異ならせて学習された複数の学習済モデルのうち、前記測定値に近い値を出力する一以上の学習済モデルを選択し、前記選択した一以上の学習済モデルに、前記移動体において収集された前記参照情報を入力したときの前記選択した一以上の学習済モデルの出力に基づいて前記推定値を導出する、
運転支援装置。 - 前記条件は、前記移動体の状態を表す状態条件と、前記移動体が置かれた環境を表す環境条件とのうち少なくとも一方を含む、
請求項1記載の運転支援装置。 - 前記参照情報は、前記移動体に搭載された操舵角センサの出力情報、前記移動体に搭載された速度センサの出力情報、および前記移動体の移動制御装置により出力される制御情報のうち少なくとも一部を含む、
請求項1または2に記載の運転支援装置。 - 前記参照情報は、複数時点の制御サイクルに跨る時系列情報を含む、
請求項1から3のうちいずれか1項記載の運転支援装置。 - 前記測定値と前記推定値との乖離が基準よりも大きい場合に、所定の情報を出力する比較部をさらに備える、
請求項1から4のうちいずれか1項記載の運転支援装置。 - コンピュータが、
移動体の周辺に存在する物体を認識し、
前記移動体と前記認識された物体との接触を操舵により回避するための第1制御を行い、
前記移動体と前記認識された物体との接触を制動により回避するための第2制御を行い、
前記移動体に搭載されたヨーレートセンサにより出力されるヨーレートの測定値とは異なる複数種類の情報を少なくとも含む参照情報に基づいて、前記移動体に生じたヨーレートの推定値を導出し、
前記測定値と前記推定値との乖離が基準よりも大きい場合に前記第1制御を抑制し、
前記コンピュータが、
前記参照情報を入力すると推定値を出力するように学習された学習済モデルとして、条件を互いに異ならせて学習された複数の学習済モデルのうち、前記測定値に近い値を出力する一以上の学習済モデルを選択し、前記選択した一以上の学習済モデルに、前記移動体において収集された前記参照情報を入力したときの前記選択した一以上の学習済モデルの出力に基づいて前記推定値を導出する、
運転支援方法。 - コンピュータに、
移動体の周辺に存在する物体を認識させ、
前記移動体と前記認識された物体との接触を操舵により回避するための第1制御を行わせ、
前記移動体と前記認識された物体との接触を制動により回避するための第2制御を行わせ、
前記移動体に搭載されたヨーレートセンサにより出力されるヨーレートの測定値とは異なる複数種類の情報を少なくとも含む参照情報に基づいて、前記移動体に生じたヨーレートの推定値を導出させ、
前記測定値と前記推定値との乖離が基準よりも大きい場合に前記第1制御を抑制させ、
前記コンピュータに、
前記参照情報を入力すると推定値を出力するように学習された学習済モデルとして、条件を互いに異ならせて学習された複数の学習済モデルのうち、前記測定値に近い値を出力する一以上の学習済モデルを選択し、前記選択した一以上の学習済モデルに、前記移動体において収集された前記参照情報を入力したときの前記選択した一以上の学習済モデルの出力に基づいて前記推定値を導出させる、
プログラム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021107578A JP7617817B2 (ja) | 2021-06-29 | 2021-06-29 | 運転支援装置、監視装置、運転支援方法、およびプログラム |
| CN202210694258.0A CN115534936A (zh) | 2021-06-29 | 2022-06-16 | 驾驶支援装置、监视装置、驾驶支援方法及存储介质 |
| US17/848,427 US12128883B2 (en) | 2021-06-29 | 2022-06-24 | Driving assistance device, monitoring device, driving assistance method, and storage medium |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021107578A JP7617817B2 (ja) | 2021-06-29 | 2021-06-29 | 運転支援装置、監視装置、運転支援方法、およびプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2023005576A JP2023005576A (ja) | 2023-01-18 |
| JP7617817B2 true JP7617817B2 (ja) | 2025-01-20 |
Family
ID=84543697
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021107578A Active JP7617817B2 (ja) | 2021-06-29 | 2021-06-29 | 運転支援装置、監視装置、運転支援方法、およびプログラム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US12128883B2 (ja) |
| JP (1) | JP7617817B2 (ja) |
| CN (1) | CN115534936A (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7804542B2 (ja) * | 2022-06-30 | 2026-01-22 | 株式会社Subaru | 肩甲骨位置推定装置及びシート |
| CN119796209A (zh) * | 2023-10-10 | 2025-04-11 | 罗伯特·博世有限公司 | 用于车辆的实时横向干扰检测的方法和设备 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018192865A (ja) | 2017-05-16 | 2018-12-06 | 株式会社デンソー | 自動運転支援装置および自動運転支援方法 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07333242A (ja) * | 1994-06-13 | 1995-12-22 | Mazda Motor Corp | 車両のヨーレート推定方法及びその装置 |
| JP3892491B2 (ja) * | 1995-09-01 | 2007-03-14 | 富士重工業株式会社 | 制動力制御装置 |
| JP4483551B2 (ja) * | 2004-11-30 | 2010-06-16 | 株式会社アドヴィックス | 車両の運動制御装置 |
| US8090503B2 (en) * | 2008-05-14 | 2012-01-03 | Ford Global Technologies | Method for determining absolute steering wheel angle from a single-turn steering wheel angle sensor |
| JP5509554B2 (ja) * | 2008-08-08 | 2014-06-04 | 日産自動車株式会社 | 車両用走行支援装置および車両用走行支援方法 |
| US9014921B2 (en) * | 2010-08-10 | 2015-04-21 | Continental Teves Ag & Co. Ohg | Method and system for regulating driving stability |
| JP2012066777A (ja) * | 2010-09-27 | 2012-04-05 | Mazda Motor Corp | ヨーレートのずれ検出装置 |
| KR102313025B1 (ko) * | 2017-04-03 | 2021-10-15 | 현대자동차주식회사 | 차량 및 그 제어방법 |
| JP7158105B2 (ja) | 2017-06-15 | 2022-10-21 | 日立Astemo株式会社 | 走行制御装置 |
| JP6521496B1 (ja) * | 2017-12-27 | 2019-05-29 | マツダ株式会社 | 車両の挙動制御装置 |
| JP6607532B2 (ja) * | 2017-12-27 | 2019-11-20 | マツダ株式会社 | 車両の挙動制御装置 |
| JP2020029140A (ja) * | 2018-08-22 | 2020-02-27 | 日立オートモティブシステムズ株式会社 | 車両制御装置、車両制御方法及び車両制御システム |
| JP7297198B2 (ja) * | 2019-04-22 | 2023-06-26 | マツダ株式会社 | 車両システム |
-
2021
- 2021-06-29 JP JP2021107578A patent/JP7617817B2/ja active Active
-
2022
- 2022-06-16 CN CN202210694258.0A patent/CN115534936A/zh active Pending
- 2022-06-24 US US17/848,427 patent/US12128883B2/en active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018192865A (ja) | 2017-05-16 | 2018-12-06 | 株式会社デンソー | 自動運転支援装置および自動運転支援方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US12128883B2 (en) | 2024-10-29 |
| JP2023005576A (ja) | 2023-01-18 |
| US20220410880A1 (en) | 2022-12-29 |
| CN115534936A (zh) | 2022-12-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11267474B2 (en) | Vehicle control device, vehicle control method, and storage medium | |
| US12559132B2 (en) | Method and system for conditional operation of an autonomous agent | |
| US10457294B1 (en) | Neural network based safety monitoring system for autonomous vehicles | |
| US11370420B2 (en) | Vehicle control device, vehicle control method, and storage medium | |
| JP6559194B2 (ja) | 運転支援装置、運転支援方法、およびプログラム | |
| US11914386B2 (en) | Mobile object control device, mobile object control method, and storage medium | |
| US11498574B2 (en) | Learning device, learning method, and storage medium | |
| US20190023208A1 (en) | Brake prediction and engagement | |
| CN110281930A (zh) | 车辆控制装置、车辆、车辆控制方法以及存储介质 | |
| US10940860B2 (en) | Vehicle control device, vehicle control method, and storage medium | |
| WO2019163010A1 (ja) | 車両制御システム、車両制御方法、およびプログラム | |
| US20240320505A1 (en) | Model-based reinforcement learning | |
| CN113899307B (zh) | 处理装置、处理方法及存储介质 | |
| WO2018220829A1 (ja) | ポリシー生成装置及び車両 | |
| US20230026400A1 (en) | Directional vehicle steering cues | |
| JP7617817B2 (ja) | 運転支援装置、監視装置、運転支援方法、およびプログラム | |
| JP7461989B2 (ja) | 運転支援装置、運転支援方法、およびプログラム | |
| JP7706350B2 (ja) | 移動体制御装置、移動体制御方法、およびプログラム | |
| EP4491483B1 (en) | Automated driving system | |
| JP2023051164A (ja) | 運転支援装置、運転支援方法、およびプログラム | |
| JP7788979B2 (ja) | 推定装置、推定方法、およびプログラム | |
| JP7607478B2 (ja) | 移動体制御装置、移動体制御方法、およびプログラム | |
| JP2023049749A (ja) | 車両制御装置、情報処理装置、それらの動作方法及びプログラム | |
| CN115129767A (zh) | 信息处理装置、车辆以及存储介质 | |
| EP4484244B1 (en) | Control apparatus, control method, and computer program |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20231128 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20240826 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240917 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20241112 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20241210 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250107 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7617817 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |