JP7619468B2 - 車両制御方法及び車両制御装置 - Google Patents
車両制御方法及び車両制御装置 Download PDFInfo
- Publication number
- JP7619468B2 JP7619468B2 JP2023544814A JP2023544814A JP7619468B2 JP 7619468 B2 JP7619468 B2 JP 7619468B2 JP 2023544814 A JP2023544814 A JP 2023544814A JP 2023544814 A JP2023544814 A JP 2023544814A JP 7619468 B2 JP7619468 B2 JP 7619468B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- host vehicle
- target
- speed
- stop position
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/09—Taking automatic action to avoid collision, e.g. braking and steering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/181—Preparing for stopping
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/06—Direction of travel
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
- B60W2520/105—Longitudinal acceleration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/18—Steering angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/53—Road markings, e.g. lane marker or crosswalk
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/404—Characteristics
- B60W2554/4041—Position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/404—Characteristics
- B60W2554/4042—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/801—Lateral distance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/802—Longitudinal distance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/10—Longitudinal speed
- B60W2720/106—Longitudinal acceleration
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Traffic Control Systems (AREA)
Description
本発明は、自動的に物体を回避する際に発生する過大な舵角変化を抑制することを目的とする。
図1は、実施形態の車両制御装置を搭載する車両の概略構成の一例を示す図である。自車両1は、自車両1の走行を制御する車両制御装置10を備える。車両制御装置10は、センサによって自車両1の周囲の走行環境を検出し、周囲の走行環境に基づいて自車両1の走行を支援する。車両制御装置10による自車両1の走行支援制御は、例えば、運転者が関与せずに自動で自車両1を走行させる自律走行制御を含んでよい。また、車両制御装置10による走行支援制御は、自車両1の操舵角、駆動力又は制動力を部分的に制御して、自車両1の運転者を支援する運転支援制御を含んでもよい。
物体センサ11は、自車両1に搭載されたレーザレーダやミリ波レーダ、ソナー、カメラ、LIDARなど、自車両1の周辺の物体を検出する複数の異なる種類の物体検出センサを備える。
地図データベース14は、自動運転用の地図として好適な高精度地図データ(以下、単に「高精度地図」という。)を記憶してよい。高精度地図は、ナビゲーション用の地図データ(以下、単に「ナビ地図」という。)よりも高精度の地図データであり、道路単位の情報よりも詳細な車線単位の情報を含む。例えば車線単位の情報は、車線基準線(例えば車線中央線)上の基準点を示す車線ノードの情報と、車線ノード間の車線の区間態様を示す車線リンクの情報を含む。車線ノードの情報は、車線ノードの識別番号、位置座標、接続される車線リンク数、接続される車線リンクの識別番号を含む。車線リンクの情報は、車線リンクの識別番号、車線の種類、車線の幅員、車線境界線の種類、車線の形状、車線区分線の形状、車線基準線の形状を含む。
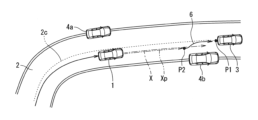
いま、車線2の車線中央2cに沿って自車両1の目標走行軌道を設定し、この目標走行軌道に沿って自車両1を走行させて目標停止位置P1で停止する制御を想定する。目標停止位置P1は、例えば先行車両3や、図示しない停止線の所定距離手前の位置であってよい。自車両1の前方の車線2上には、自車両1が回避すべき回避対象物として駐車車両4a及び4bが存在している。このため、駐車車両4a及び4bとの距離を保ちつつ車線中央2cに沿った目標走行軌道に近づくように自車両1を走行させる。例えば、自車両1は軌道Tに沿って走行する。
軌道Tの例では、駐車車両4aとの距離を保つために矢印5aのように車線中央2c(すなわち目標走行軌道)から車線幅方向に偏差(以下「横偏差」と表記することがある)を持って走行する。駐車車両4aを通過後は、矢印5bのように横偏差を解消するように左側に操舵する。また、目標停止位置P1のすぐ手前の駐車車両4bとの距離を保つために、矢印5cに示すように左側に操舵して目標走行軌道との横偏差を発生させる。駐車車両4bを通過後は、矢印5dのように横偏差を解消するように右側に操舵する。
例えば、車速低下時点T1を検出又は推定し、車速低下時点T1における車線中央2c又は車線境界線に対する自車両1の横偏差Yoffを検出してよい。そして、車速低下時点T1に検出した横偏差Yoffを維持するように自車両の目標走行軌道Xを生成してよい。
自車両1が回避すべき回避対象物(図2Bの例では駐車車両4b)を検出した場合には、車速低下時点T1の後、目標走行軌道Xに沿って走行しつつ自車両1の減速度を調整することにより回避対象物を回避する。
また、車速低下時点T1よりも前の時点で回避対象物(例えば駐車車両4a)を回避していた場合には、車速低下時点T1の横偏差Yoffを維持するように目標走行軌道Xを設定する。このため、回避行動前の車線内横位置に復帰する動作がなくなるので、自車両の速度が低い状態での舵角変化を抑制できる。この結果、ステアリングホイールの回転を抑制できる。
物体検出部30は、物体センサ11の検出信号に基づいて、自車両1の周辺の物体、例えば車両(自動車や自動二輪車)、歩行者、障害物などの位置、姿勢、大きさ、速度などを検出する。物体検出部30は、例えば自車両1を空中から眺める天頂図(平面図ともいう)において、物体の2次元位置、姿勢、大きさ、速度などを表現する検出結果を出力する。
物体追跡部34は、物体検出部30によって検出された物体を追跡する。具体的には、検出統合部33が統合した検出結果に基き、異なる時刻に出力された物体の挙動から、異なる時刻間における物体の同一性の検証(対応付け)を行い、その対応付けに基づいて物体の速度などの挙動を予測する。
車両制御部36は、物体追跡部34による物体の挙動の予測結果と、地図内位置演算部35による自車両1の位置及び姿勢の演算結果と、乗員(例えば運転者)の入力に基づいて、アクチュエータ17を駆動して自車両1の走行を制御する。車両制御部36は、ルート設定部40と、パス生成部41と、速度低下時点判定部42と、制御指令値演算部43を備える。
P=[PL,PL+1,…,PL+M]…(1)
なお、式(1)のPL+Mは、現在位置からM[m]進んだパス上の点のデータである。パスPは、自車両1が追従すべきパスの形状を表す情報であり、車速の情報を持たない。点列の各点PL+iは、例えば位置(x,y)、姿勢(θ),曲率(κ)で表現される。位置(x,y)は地図座標系における座標を示し、姿勢(θ)は各点でのパスの進行方向(接線方向)を示す。
L<v2/(2a) …(2)
式(2)のLは自車両1の現在位置から目標停止位置までの距離であり、vは現在の自車両1の車速であり、aは所定の減速度(設定値)である。速度低下時点判定部42は、一定の減速度aで停止するまでの距離よりも、現在位置から目標停止位置までの距離が短くなった場合に、目標停止位置へ対する自車両の減速を開始したと判定する。
(A)減速を開始したと判定した後に自車両が目標停止位置に停止した。
(B)減速を開始したと判定した後に、目標停止位置が変更若しくはキャンセルされた。例えば、停止目標である先行車両が前進した。停止目標であった停止線が設けられていた信号機が停止表示(赤信号)から進行表示(青信号)に変化することにより目標停止位置がキャンセルされた。
減速開始取消条件(A)又は(B)が成立すると、速度低下時点判定部42は、目標停止位置へ対する自車両1の減速を開始した旨の判定を取り消し、減速開始フラグFdを「False」に設定する。
目標停止位置へ対する自車両1の減速を開始したと判定した後に、自車両1が停止直前であると判定した場合、速度低下時点判定部42は、自車両1の速度低下状態を検出する。速度低下時点判定部42は、最初に速度低下状態を検出した時点を車速低下時点T1として検出する。
なお、速度低下時点判定部42は、自車両1の現在の車速vと減速度と基づいて現在の車速vが速度閾値VTHを下回る時刻を推定し、目標停止位置へ対する自車両1の減速を開始したと判定した後に車速vが速度閾値VTHを下回る時刻を車速低下時点T1として推定してもよい。
すなわち「速度低下状態」は、目標停止位置へ対する自車両1の減速を開始し、且つ車速vが速度閾値VTH未満である状態である。「車速低下時点T1」は、目標停止位置へ対する自車両1の減速を開始した後に、車速vが速度閾値VTH未満に低下した時点である。
一方で、減速を開始したと判定しない場合や停止直前であると判定しない場合には、速度低下時点判定部42は、自車両1の速度低下状態を検出しない。このとき記録済フラグFrが「False」に設定される。
X=[Xt,Xt+dt,Xt+2dt…,Xt+N×dt]…(3)
Xt+Tは、T秒後の自車両の目標状態であり、位置(x,y)、姿勢(θ),速度(v),曲率(κ)で表現される。
また、制御指令値演算部43は、自車両1の予測軌道Xpを算出する。予測軌道Xpは、将来の車両の状態を予測した軌道であり、自車両1の現在位置を基点として障害物を回避しながら目標軌道にできるだけ近づこうとする軌道となる。予測軌道Xpの各点の成分は、目標走行軌道Xの各点の成分と同じである。
変位Dは次式(4)により求められる。
D=vt+Tーdt×dt …(4)
vt+Tーdt:前ステップの目標軌道の点Xt+Tーdtの速度
dt:ステップ時間幅
例えば制御指令値演算部43は、次式(5)の評価関数Fを最小化するような速度指令値Vを最適化計算により求めてもよい。
目標停止位置P1の直前において自車両1が極低速で走行している状態で予測軌道Xpに沿った旋回動作を行うと、上述のとおりステアリングホイールが大きく動いて乗員に違和感を与える可能性がある。
図4Bを参照する。目標停止位置P1に近づいて自車両1の速度低下状態が検出されると、横偏差Yoffを維持するように目標走行軌道Xが補正される。これにより、駐車車両4aを回避した時の横偏差Yoffを解消することなく停車するため、ステアリングホイールの動きを抑制できる。
車両制御ではN×dt秒分の自車両1の予測軌道Xpが、自車両周辺の回避対象物との距離を保ちつつ目標走行軌道Xに近づくように自車両1に入力する制御入力(加減速指令値dVin及び操舵指令値dKin)を算出する。この制御は、一般的なモデル予測制御を用いて実現できる。
例えば制御指令値演算部43は、離散的な時刻t+Tにおいて制御入力Uを自車両1に入力したときに、自車両1の予測軌道Xpの点Xpt+Tと目標走行軌道の点Xt+Tとの差分と、回避対象物に対する自車両1の接近度合いと、に応じて定義された評価関数が小さくなるように、時刻t+Tにおける制御入力Uを演算する。
自車両1の速度低下状態が検出されていない場合には、各時刻t+Tでの評価関数J1を例えば次式(7)のように定義する。
また、J1の第2項は、自車両1の予測状態Xpt+Tと目標走行軌道Xt+Tとの差分にかかるコストである。第3項は、Uの絶対値にかかるコストである。これらを総和した評価関数とすることで、回避対象物の回避(第1項)、目標軌道への追従(第2項)、制御入力の安定化(第3項)を両立した制御入力が算出される。

またA’i,t+Tは、時刻t+Tよりも前の周期においた制御入力を演算する際に計算された回避対象物iに対する自車両1の接近度合いの確定値(すなわち、時刻t+Tよりも前の時刻における制御入力Uが自車両1に入力された場合の接近度合い)である。このため制御入力Uでは変化しない。すなわち、Uによる偏微分は0になる。
制御指令値演算部43は、評価関数J1、J2を最小化するような制御入力Uを算出する。制御指令値演算部43は、算出した制御入力Uに基づいてアクチュエータ17を駆動して、自車両1の速度及び操舵角を制御する。
図5は、実施形態の車両制御方法の一例のフローチャートである。
ステップS1においてコントローラ16は、自車両1の周囲の物体や停止線、自己位置を検出する。ステップS2において速度低下時点判定部42は、速度低下状態検出処理を実施する。
ステップS36において速度低下時点判定部42は、減速開始取消条件が成立するか否かを判定する。減速開始取消条件が成立しない場合(S36:N)に処理はステップS33へ進む。減速開始取消条件が成立する場合(S36:Y)に処理はステップS37へ進む。
ステップS37において速度低下時点判定部42は、減速開始フラグFdを「False」に設定する。その後に処理はステップS31に進む。
ステップS32において速度低下時点判定部42は、減速開始フラグFdを「True」に設定する。その後に処理はステップS33に進む。
自車両1が停止直前である場合(S33:Y)に処理はステップS34へ進む。速度低下時点判定部42は、自車両1の速度低下状態を検出したと判定する。その後に速度低下状態検出処理は終了する。
ステップS5において制御指令値演算部43は、変数iを「1」に初期化する。ステップS6において制御指令値演算部43は、時刻t+i×dtにおける目標走行軌道Xの点Xt+i×dtの位置を算出する。ステップS7において制御指令値演算部43は、目標走行軌道Xの点Xt+i×dtにおける速度指令値を算出する。ステップS8において制御指令値演算部43は、変数iの値を1つ増加する。ステップS9において制御指令値演算部43は、変数iがNより大きいか否かを判定する。変数iがNより大きくない場合(S9:N)に処理はステップS6に戻る。変数iがNより大きい場合(S9:Y)に処理はステップS10に進む。
一方で、ステップS11において速度低下時点判定部42は、最初に速度低下状態を検出したか否か(すなわち記録済フラグFrが「False」であるか否か)を判定する。最初に速度低下状態を検出した場合(S11:Y)に処理はステップS12に進む。既に速度低下状態が検出済みであった場合(S11:N)に処理はステップS14に進む。
ステップS12において速度低下時点判定部42は、記録済フラグFrを「True」に設定する。ステップS13において速度低下時点判定部42は横偏差Yoffを記録する。ステップS14~S16の処理はステップS5~S7の処理と同様である。
ステップS18において制御指令値演算部43は、変数iの値を1つ増加する。ステップS19において制御指令値演算部43は、変数iがNより大きいか否かを判定する。変数iがNより大きくない場合(S19:N)に処理はステップS15に戻る。変数iがNより大きい場合(S19:Y)に処理はステップS20に進む。ステップS20において制御指令値演算部43は、上式(8)の評価関数J2を小さくする最適化計算により制御入力Uを算出する。その後に処理はステップS21へ進む。
ステップS21において制御指令値演算部43は、制御入力Uで自車両1を制御する。ステップS22においてイグニションキーがオフになったか判定する。イグニションキーがオフでない場合(S22:N)に処理はステップS1に戻る。イグニションキーがオフになった場合(S22:Y)に処理は終了する。
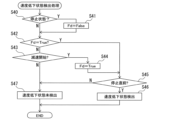
(1)上記実施形態では、減速開始取消条件(A)「自車両が目標停止位置に停止した」又は(B)「目標停止位置が変更若しくはキャンセルされた」のいずれか一方が成立すると、速度低下時点判定部42が、目標停止位置へ対する自車両1の減速を開始した旨の判定を取り消した。これに代えて図7に示すフローチャートのように減速開始取消条件(B)の判断を省略してもよい。
ステップS40において速度低下時点判定部42は自車両1が停止状態であるか否かを判定する。自車両1が停止状態である場合(S40:Y)に処理はステップS41へ進む。自車両1が停止状態でない場合(S40:N)に処理はステップS42へ進む。ステップS41において速度低下時点判定部42は減速開始フラグFdを「False」に設定する。
ステップS42において速度低下時点判定部42は減速開始フラグFdが「True」であるか否かを判定する。減速開始フラグFdが「True」である場合(S42:Y)に処理はステップS45へ進む。減速開始フラグFdが「True」でない場合(S42:N)に処理はステップS43へ進む。ステップS43~S47の処理は図6のステップS31~S35の処理と同様である。
L>v2/(2a)+LTH …(9)
LTH:判定マージン
すなわち、自車両1が目標停止位置に対して減速を開始したと判定した後に状況が変わり、目標停止位置までの余裕がLTH以上になったら、目標停止位置へ対する自車両1の減速を開始した旨の判定を取り消してもよい。
ステップS50において速度低下時点判定部42は自車両1が減速中であるか否かを判定する。速度低下時点判定部42は、次式(10)が成立する場合に自車両1が減速中であると判定する。
L<v2/(2a)+LTH …(10)
自車両1が減速中である場合(S50:Y)処理はステップS51へ進む。減速中でない場合(S50:N)処理はステップS53へ進む。
ステップS51において速度低下時点判定部42は自車両1が停止直前であるか否かを判定する。自車両1が停止直前である(S51:Y)に処理はステップS52へ進む。自車両1が停止直前でない場合(S51:N)に処理はステップS53へ進む。ステップS52において速度低下時点判定部42は、自車両1の速度低下状態を検出したと判定する。ステップS53において速度低下時点判定部42は、自車両1の速度低下状態を検出していないと判定する。図8のステップS50の判定では、マージンLTHの分だけ、減速中であるか否かの判定条件が緩くなるが、ステップS51の停止直前であるか否かの判定と合わせれば、上記の実施形態と同様となる。
(1)コントローラ16は、自車両の車速が所定の速度閾値未満に低下するか否かを判定する車速判定処理と、車線中央又は車線境界線に対する自車両の横偏差を検出する横偏差検出処理と、車速が速度閾値未満に低下すると判定した場合、車速が速度閾値未満に低下する時点である車速低下時点以降の横偏差の変化を抑制するように自車両の第1目標走行軌道を生成する目標軌道生成処理と、自車両が回避すべき回避対象物を検出する回避対象物検出処理と、車速低下時点後、第1目標走行軌道に沿って走行しつつ自車両の減速度を調整することにより回避対象物を回避する回避処理を実行する。
これにより、自車両の速度が低いとき、物体を回避するのに伴う発生する舵角変化を抑制できる。これにより、ステアリングホイールが大きく動いて乗員に違和感を与えるのを抑制できる。
Claims (7)
- 自車両の車速が所定の速度閾値未満に低下するか否かを判定する車速判定処理と、
車線中央又は車線境界線に対する前記自車両の横偏差を検出する横偏差検出処理と、
前記車速が前記速度閾値未満に低下すると判定した場合、前記車速が前記速度閾値未満に低下する時点である車速低下時点以降の前記横偏差の変化を抑制するように前記自車両の第1目標走行軌道を生成する目標軌道生成処理と、
前記自車両が回避すべき回避対象物を検出する回避対象物検出処理と、
前記車速が前記速度閾値未満に低下すると判定しない場合に比べて前記車速が前記速度閾値未満に低下すると判定した場合に前記回避対象物に対する前記自車両の接近度合いを低減する操舵制御を抑制することにより、前記車速低下時点後、前記第1目標走行軌道に沿って走行しつつ前記自車両の減速度を調整することにより前記回避対象物を回避する回避処理と、
をコントローラに実行させることを特徴とする車両制御方法。 - 前記コントローラは、
前記自車両の前方の目標停止位置を設定する処理と、
前記目標停止位置へ対する前記自車両の減速を開始した否かを判定する処理と、を実行し、
前記目標停止位置へ対する前記自車両の減速を開始したと判定し、且つ前記車速が前記速度閾値未満に低下すると判定した場合に、前記目標軌道生成処理と、前記回避処理と、を実行することを特徴とする請求項1に記載の車両制御方法。 - 前記コントローラは、前記目標停止位置へ対する前記自車両の減速を開始したと判定した後に、前記自車両が前記目標停止位置に停止するか、前記目標停止位置が変更若しくはキャンセルされた場合に、前記目標軌道生成処理と、前記回避処理と、を実行しないことを特徴とする請求項2に記載の車両制御方法。
- 前記コントローラは、
前記自車両の現在の前記車速に応じて、所定減速度で前記目標停止位置に停止できる所要距離を算出する処理を実行し、
前記自車両から前記目標停止位置までの距離が、前記所要距離に応じて設定される距離閾値未満である場合に、前記目標停止位置へ対する前記自車両の減速を開始したと判定し、
前記目標停止位置へ対する前記自車両の減速を開始したと判定し、且つ前記車速が前記速度閾値未満に低下すると判定した場合に、前記目標軌道生成処理と、前記回避処理と、を実行することを特徴とする、
ことを特徴とする請求項2又は3に記載の車両制御方法。 - 前記コントローラは、車線形状に基づいて第2目標走行軌道を生成し、前記第2目標走行軌道の車線幅方向位置を、前記車速低下時点に検出した前記横偏差に応じて移動させることにより、前記第1目標走行軌道を生成する、ことを特徴とする請求項1~4のいずれか一項に記載の車両制御方法。
- 前記コントローラは、前記自車両に加減速度と操舵角の制御入力を入力したときの前記自車両の予測位置と前記第1目標走行軌道との差分と、前記回避対象物に対する前記自車両の接近度合いとに応じた評価関数を小さくするように前記制御入力を演算する処理を実行し、
第1時刻において前記制御入力を演算する際に評価される前記評価関数が、前記第1時刻よりも前の第2時刻において演算された前記制御入力を前記自車両に入力したときの前記接近度合いに、前記自車両に対する前記回避対象物の相対速度を乗算して得られた項を含むことを特徴とする請求項1~5のいずれか一項に記載の車両制御方法。 - 自車両の車速が所定の速度閾値未満に低下するか否かを判定する車速判定処理と、
車線中央又は車線境界線に対する前記自車両の横偏差を検出する横偏差検出処理と、
前記車速が前記速度閾値未満に低下すると判定した場合、前記車速が前記速度閾値未満に低下する時点である車速低下時点以降の前記横偏差の変化を抑制するように前記自車両の第1目標走行軌道を生成する目標軌道生成処理と、
前記自車両が回避すべき回避対象物を検出する回避対象物検出処理と、
前記車速が前記速度閾値未満に低下すると判定しない場合に比べて前記車速が前記速度閾値未満に低下すると判定した場合に前記回避対象物に対する前記自車両の接近度合いを低減する操舵制御を抑制することにより、前記車速低下時点後、前記第1目標走行軌道に沿って走行しつつ前記自車両の減速度を調整することにより前記回避対象物を回避する回避処理と、
を実行するコントローラを備えることを特徴とする車両制御装置。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/031772 WO2023032009A1 (ja) | 2021-08-30 | 2021-08-30 | 車両制御方法及び車両制御装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JPWO2023032009A1 JPWO2023032009A1 (ja) | 2023-03-09 |
| JPWO2023032009A5 JPWO2023032009A5 (ja) | 2024-04-17 |
| JP7619468B2 true JP7619468B2 (ja) | 2025-01-22 |
Family
ID=85412310
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023544814A Active JP7619468B2 (ja) | 2021-08-30 | 2021-08-30 | 車両制御方法及び車両制御装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US12202471B2 (ja) |
| EP (1) | EP4398215B1 (ja) |
| JP (1) | JP7619468B2 (ja) |
| CN (1) | CN117795580A (ja) |
| MX (1) | MX2024002451A (ja) |
| WO (1) | WO2023032009A1 (ja) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013136781A1 (ja) | 2012-03-16 | 2013-09-19 | 日産自動車株式会社 | 運転操作支援装置、運転操作支援方法、把持状態判定方法 |
| JP2018177153A (ja) | 2017-04-21 | 2018-11-15 | 株式会社デンソー | 車両の操舵支援装置および操舵支援制御方法 |
| JP2020111090A (ja) | 2019-01-08 | 2020-07-27 | 本田技研工業株式会社 | 車両の制御システム、車両の制御方法、およびプログラム |
| JP2021011168A (ja) | 2019-07-05 | 2021-02-04 | 日産自動車株式会社 | 運転制御方法及び運転制御装置 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07179140A (ja) * | 1993-12-24 | 1995-07-18 | Nissan Motor Co Ltd | 車両用自動操縦装置 |
| JP4270259B2 (ja) * | 2006-10-05 | 2009-05-27 | 日産自動車株式会社 | 障害物回避制御装置 |
| DE102010051203B4 (de) * | 2010-11-12 | 2022-07-28 | Zf Active Safety Gmbh | Verfahren zur Erkennung von kritischen Fahrsituationen von Lastkraft- oder Personenkraftwagen, insbesondere zur Vermeidung von Kollisionen |
| EP3181420B1 (en) | 2014-08-11 | 2018-12-19 | Nissan Motor Co., Ltd | Travel control device and method for vehicle |
| JP6731234B2 (ja) * | 2015-10-30 | 2020-07-29 | 日立オートモティブシステムズ株式会社 | 車両運動制御装置及びその方法 |
| DE102016011282A1 (de) * | 2016-09-20 | 2018-03-22 | Wabco Gmbh | Verfahren zum Durchführen eines Ausweichmanövers mit einem Nutzfahrzeug-Gespann, sowie Notausweichsystem |
| JP6801585B2 (ja) * | 2017-04-12 | 2020-12-16 | トヨタ自動車株式会社 | 車線変更支援装置 |
| JP6627822B2 (ja) * | 2017-06-06 | 2020-01-08 | トヨタ自動車株式会社 | 車線変更支援装置 |
| US10689033B2 (en) * | 2018-03-27 | 2020-06-23 | Subaru Corporation | Vehicle driving assist apparatus |
| DE102019201590B4 (de) * | 2019-02-07 | 2025-07-10 | Volkswagen Aktiengesellschaft | Verfahren und Vorrichtung zum Vermeiden einer Kollision eines Fahrzeugs mit einem entgegenkommenden Fahrzeug |
| KR20210000994A (ko) * | 2019-06-26 | 2021-01-06 | 현대자동차주식회사 | 차량 및 그 제어방법 |
| JP7276181B2 (ja) * | 2020-01-29 | 2023-05-18 | トヨタ自動車株式会社 | 運転支援システム |
-
2021
- 2021-08-30 WO PCT/JP2021/031772 patent/WO2023032009A1/ja not_active Ceased
- 2021-08-30 CN CN202180101518.2A patent/CN117795580A/zh active Pending
- 2021-08-30 MX MX2024002451A patent/MX2024002451A/es unknown
- 2021-08-30 EP EP21955906.9A patent/EP4398215B1/en active Active
- 2021-08-30 JP JP2023544814A patent/JP7619468B2/ja active Active
- 2021-08-30 US US18/683,668 patent/US12202471B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013136781A1 (ja) | 2012-03-16 | 2013-09-19 | 日産自動車株式会社 | 運転操作支援装置、運転操作支援方法、把持状態判定方法 |
| JP2018177153A (ja) | 2017-04-21 | 2018-11-15 | 株式会社デンソー | 車両の操舵支援装置および操舵支援制御方法 |
| JP2020111090A (ja) | 2019-01-08 | 2020-07-27 | 本田技研工業株式会社 | 車両の制御システム、車両の制御方法、およびプログラム |
| JP2021011168A (ja) | 2019-07-05 | 2021-02-04 | 日産自動車株式会社 | 運転制御方法及び運転制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US12202471B2 (en) | 2025-01-21 |
| EP4398215A4 (en) | 2025-02-19 |
| WO2023032009A1 (ja) | 2023-03-09 |
| EP4398215B1 (en) | 2025-11-19 |
| CN117795580A (zh) | 2024-03-29 |
| JPWO2023032009A1 (ja) | 2023-03-09 |
| EP4398215A1 (en) | 2024-07-10 |
| MX2024002451A (es) | 2024-03-08 |
| US20240425039A1 (en) | 2024-12-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10994730B2 (en) | Traveling assistance method and traveling assistance device | |
| EP3591638B1 (en) | Drive assistance method and drive assistance device | |
| RU2703824C1 (ru) | Устройство управления транспортным средством | |
| JP7552918B2 (ja) | 車両制御方法及び車両制御装置 | |
| US12344274B2 (en) | Vehicle traveling control apparatus | |
| JP7175344B1 (ja) | 車両制御装置、車両制御システム、車両制御方法及び車両制御プログラム | |
| US11634140B2 (en) | Vehicle control method and vehicle control device | |
| JP2024506972A (ja) | 障害物を回避するための方法 | |
| JP2024136762A (ja) | 車両制御システム | |
| JP7619468B2 (ja) | 車両制御方法及び車両制御装置 | |
| WO2025057361A1 (ja) | 運転制御方法及び運転制御装置 | |
| JP7614820B2 (ja) | 運転制御方法及び運転制御装置 | |
| CN119156657A (zh) | 通过地点生成装置 | |
| JP7746903B2 (ja) | 走行制御方法及び走行制御装置 | |
| JP7697333B2 (ja) | 運転支援方法及び運転支援装置 | |
| JP7800262B2 (ja) | 先行車両判定方法及び先行車両判定装置 | |
| JP7652286B2 (ja) | 車両制御方法及び車両制御装置 | |
| JP7722126B2 (ja) | 車両制御方法及び車両制御装置 | |
| JP7805143B2 (ja) | 駆動力制御方法及び駆動力制御装置 | |
| JP7790248B2 (ja) | 走行制御方法及び走行制御装置 | |
| JP2024154525A (ja) | 車両制御方法及び車両制御装置 | |
| WO2025225016A1 (ja) | 車両走行支援方法及び車両走行支援装置 | |
| WO2026083532A1 (ja) | 車両制御方法、及び車両制御装置 | |
| JP2024039134A (ja) | 車両制御装置及び車両制御方法 | |
| WO2025224888A1 (ja) | 車両制御方法及び車両制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240124 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240124 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20241008 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20241120 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20241210 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20241223 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7619468 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |