JP7624726B2 - アンテナ装置およびサンドイッチアレー装置 - Google Patents
アンテナ装置およびサンドイッチアレー装置 Download PDFInfo
- Publication number
- JP7624726B2 JP7624726B2 JP2021542702A JP2021542702A JP7624726B2 JP 7624726 B2 JP7624726 B2 JP 7624726B2 JP 2021542702 A JP2021542702 A JP 2021542702A JP 2021542702 A JP2021542702 A JP 2021542702A JP 7624726 B2 JP7624726 B2 JP 7624726B2
- Authority
- JP
- Japan
- Prior art keywords
- antenna
- directivity
- signal
- array antenna
- phased array
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






























































Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S3/00—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic or electromagnetic waves, or particle emission, not having a directional significance, are being received
- G01S3/02—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic or electromagnetic waves, or particle emission, not having a directional significance, are being received using radio waves
- G01S3/14—Systems for determining direction or deviation from predetermined direction
- G01S3/46—Systems for determining direction or deviation from predetermined direction using antennas spaced apart and measuring phase or time difference between signals therefrom, i.e. path-difference systems
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01Q—ANTENNAS, i.e. RADIO AERIALS
- H01Q21/00—Antenna arrays or systems
- H01Q21/06—Arrays of individually energised antenna units similarly polarised and spaced apart
- H01Q21/20—Arrays of individually energised antenna units similarly polarised and spaced apart the units being spaced along or adjacent to a curvilinear path
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01Q—ANTENNAS, i.e. RADIO AERIALS
- H01Q3/00—Arrangements for changing or varying the orientation or the shape of the directional pattern of the waves radiated from an antenna or antenna system
- H01Q3/44—Arrangements for changing or varying the orientation or the shape of the directional pattern of the waves radiated from an antenna or antenna system varying the electric or magnetic characteristics of reflecting, refracting, or diffracting devices associated with the radiating element
- H01Q3/46—Active lenses or reflecting arrays
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Variable-Direction Aerials And Aerial Arrays (AREA)
Description
[アンテナ装置の構成]
図1は、本実施の形態におけるアンテナ装置10の概要構成の一例を示す図である。
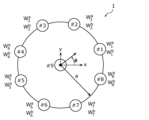
図2は、図1に示す円形配列フェーズドアレーアンテナ1の具体的構成例を示す図である。図2で示されるφは、水平面(XY平面)におけるX軸となす方向であり、XY平面における到来波の方向(到来波方向)を表している。
地板2は、スイッチング制御により半径rgが可変である円形状の地板である。本実施の形態では、地板2は、例えば図1に示されるように、面状(板状)の導体である。なお、地板2の半径rgのサイズを可変にするのは、円形配列フェーズドアレーアンテナ1を用いて到来波方向を推定する動作を行う場合と、MIMOアレーアンテナとして動作させる場合とにおいて最適な地板2のサイズが異なるためである。
制御部3は、円形配列フェーズドアレーアンテナ1をサブアレーに分割制御するサブアレー制御機能を有する。より具体的には、制御部3は、円形配列フェーズドアレーアンテナ1に到来する到来波の地板2と平行な方向である到来波方向に応じて、N個の第1アンテナ素子を到来波方向に直交するようにN/2個のサブアレーに分割する。そして、制御部3は、このようにサブアレーの指向性を制御することで到来波方向に向いたN/2個のビームを独立に形成する。
演算部4は、円形配列フェーズドアレーアンテナ1に到来する到来波の方向である到来波方向を推定する到来波方向推定機能を有する。より具体的には、演算部4は、第1アンテナ素子それぞれの受信信号を第1アンテナ素子の配置に応じた2つの重みそれぞれをかけて合計した第1信号および第2信号と、第2アンテナ素子の受信信号である第3信号とを統計解析し、第1信号および第3信号の位相差を算出する。ここで、位相差は、到来波方向に略比例する。このように、演算部4は、第1信号および第3信号の位相差を算出することにより、円形配列フェーズドアレーアンテナ1に到来する到来波の仰角方向にも角度を有する到来波方向を推定する。なお、本実施の形態では、演算部4は、第3信号の電圧の位相角を、第1信号の電圧の位相角と第2信号の電圧の位相角との平均により算出することで、第1信号および第3信号の位相差を算出する。また、本実施の形態では、統計解析として、平均値を求める演算を行っているが、平均値を求める演算に限らず、多重波環境に適応させるために行う演算とを組み合わせてもよい。
以上のように、本実施の形態のアンテナ装置10は、円上に等間隔に配列された複数の第1アンテナ素子と、当該円の略中心に配された1個の第2アンテナ素子とからなる円形配列フェーズドアレーアンテナ1が地板2上に構成される。第1アンテナ素子と第2アンテナ素子とは、地板2に実装されたモノポールアンテナである。これにより、本実施の形態のアンテナ装置10は、水平方向だけでなく仰角方向の到来波方向を推定できる。また、本実施の形態のアンテナ装置10は、推定した到来波方向に対して指向性を制御することができる。これにより、常時最適な受信信号を得ることができるので、高速通信を実現することができる。さらに、本実施の形態のアンテナ装置10では、仰角方向を含む所定方向の角度範囲に指向性を制御することができるので、ターゲットとなる通信相手のみと通信するようにすることができる。
図5Aは、本実施の形態におけるサンドイッチアレー装置100の概要構成の一例を示す図である。
図6は、本実施の形態におけるサンドイッチアレー装置100を用いて飛翔車両間の通信を行う場合の概念を示す図である。図6には、自由に飛行方向を変化させることができる4つの飛翔車両300が示されており、それぞれ飛翔車両300a、300b、300c、300dと称している。飛翔車両300a~300dのそれぞれには、アンテナ装置10Aおよび10Bで構成されるサンドイッチアレー装置100が搭載されている。



次に、仰角方向にも角度を有する受信電波によって第2アンテナ素子(#9)に誘起される信号の電圧の位相を合成によって得る位相反転重みづけ法について説明する。以下でも、円形配列フェーズドアレーアンテナ1は、8個の第1アンテナ素子を有するとして説明する。











本実施の形態のアンテナ装置10では、到来波方向に対して垂直に配列されたサブアレーの組み合わせとなるように、円形配列フェーズドアレーアンテナ1の8個の第1アンテナ素子を4つに分割制御することで、MIMOアレーアンテナ機能を実現する。そして、本実施の形態のアンテナ装置10は、MIMOアレーアンテナ機能を実現することで、伝送容量の向上を図ることができる。
次に、サブアレーにおける3次元放射指向性について説明する。以下では、円形配列フェーズドアレーアンテナ1において第1アンテナ素子#1、#4をサブアレー2(以下、モノポールアレーアンテナとも称する)とした場合の3次元放射指向性について説明する。なお、比較例として、地板2がなく9個のダイポールアンテナで構成された円形配列フェーズドアレーアンテナ1において第1アンテナ素子#1、#4をサブアレー2(以下、ダイポールアレーアンテナとも称する)とした場合の3次元放射指向性についても説明する。
次に、本実施の形態におけるサンドイッチアレー装置100が指向性走査を実施したときの3次元放射指向性について説明する。サンドイッチアレー装置100は、45度間隔の指向性走査を行う機能を有しているが、以下では、90度間隔の3次元放射指向性のみを例に挙げて説明する。
次に、本実施の形態におけるサンドイッチアレー装置100を、MIMOアレーアンテナとして動作させたときの伝送容量について説明する。なお、比較例として、地板2がなく9個の半波長ダイポールアンテナで構成された円形配列フェーズドアレーアンテナ1(半波長ダイポールアレーアンテナと称する)をMIMOアレーアンテナとして動作させたときの伝送容量についても説明する。
次に、本実施の形態におけるサンドイッチアレー装置100を、MIMOアレーアンテナとして動作させたときに高速通信が可能であることを、伝送容量に基づく通信遮断確率(Outage Probability)を利用して確認したので、以下説明する。


上記の実施の形態では、MIMOアレーアンテナとして、2つのアンテナ装置10で構成される1つのサンドイッチアレー装置100を用いる場合について説明したが、これに限らない。サンドイッチアレー装置100をモジュール化して組み合わせることで、多素子MIMOアレーアンテナを形成してもよい。以下、この場合について説明する。
なお、本発明は、上述した実施の形態に限定されない。上述した実施の形態に対して、この発明と同一の範囲において、あるいは均等の範囲内において、種々の修正や変形を加えることが可能である。
2、2A、2B、2a、2b 地板
3 制御部
4 演算部
10、10A、10B アンテナ装置
100、100a、100b、100c、100d、100e サンドイッチアレー装置
301 ダイオード
302 チョークコイル
Claims (6)
- 円上に等間隔に配列されたN個(Nは3以上の自然数)の第1アンテナ素子と、前記円の略中心に配された1個の第2アンテナ素子とからなる円形配列フェーズドアレーアンテナと、
スイッチング制御により半径が可変である円形状の地板と、
前記円形配列フェーズドアレーアンテナに到来する到来波の前記地板と平行な方向である到来波方向に応じて、前記N個の第1アンテナ素子を前記到来波方向に直交するように前記N/2個のサブアレーに分割し、前記サブアレーの指向性を制御することで前記到来波方向に向いた前記N/2個のビームを独立に形成するサブアレー制御部と、を備え、
前記第1アンテナ素子と前記第2アンテナ素子とは、前記地板に実装されたモノポールアンテナで構成される、
アンテナ装置。 - 前記第1アンテナ素子と前記第2アンテナ素子とは、1/4波長モノポールアンテナで構成される、
請求項1に記載のアンテナ装置。 - 前記N/2個のサブアレーそれぞれは、配列方向が平行となる2個のアンテナ素子の組み合わせで構成され、
前記組み合わせは、前記到来波方向に応じて、変更される、
請求項1または2に記載のアンテナ装置。 - 円上に等間隔に配列されたN個(Nは3以上の自然数)の第1アンテナ素子と、前記円の略中心に配された1個の第2アンテナ素子とからなる円形配列フェーズドアレーアンテナと、
スイッチング制御により半径が可変である円形状の地板と、
前記円形配列フェーズドアレーアンテナに到来する到来波の前記地板となす方向である仰角方向の経路差を用いて算出されるデルタ指向性およびシグマ指向性を形成するために与えられる位相を、所望の通信方向に最も近い2つの前記第1アンテナ素子に与えることによって、前記仰角方向を含む所定の角度範囲に、前記円形配列フェーズドアレーアンテナの指向性を制御する指向性制御部と、を備え、
前記第1アンテナ素子と前記第2アンテナ素子とは、前記地板に実装されたモノポールアンテナで構成され、
前記デルタ指向性は、前記仰角方向に逆相励振を実現することによって放射利得を小さくさせる指向性であり、
前記シグマ指向性は、前記仰角方向に同相励振を実現することによって放射利得を大きくさせる指向性である、
アンテナ装置。 - 円上に等間隔に配列されたN個(Nは3以上の自然数)の第1アンテナ素子と、前記円の略中心に配された1個の第2アンテナ素子とからなる円形配列フェーズドアレーアンテナと、
スイッチング制御により半径が可変である円形状の地板と、
前記第1アンテナ素子それぞれの受信信号を前記第1アンテナ素子の配置に応じた2つの重みそれぞれをかけて合計した第1信号および第2信号と、前記第2アンテナ素子の受信信号である第3信号とを統計解析し、前記第1信号および前記第3信号の位相差を算出することにより、前記円形配列フェーズドアレーアンテナに到来する到来波の前記地板となす方向である到来波方向を推定する演算部と、を備え、
前記第1アンテナ素子と前記第2アンテナ素子とは、前記地板に実装されたモノポールアンテナで構成され、
前記演算部は、前記第3信号の電圧の位相角を、前記第1信号の電圧の位相角と前記第2信号の電圧の位相角との平均により算出することで、前記第1信号および前記第3信号の位相差を算出し、
前記位相差は、前記到来波方向に略比例する、
アンテナ装置。 - 第1アンテナ装置および第2アンテナ装置を備え、
前記第1アンテナ装置および前記第2アンテナ装置の各々は、
円上に等間隔に配列されたN個(Nは3以上の自然数)の第1アンテナ素子と、前記円の略中心に配された1個の第2アンテナ素子とからなる円形配列フェーズドアレーアンテナと、
スイッチング制御により半径が可変である円形状の地板と、を有し、
前記第1アンテナ素子と前記第2アンテナ素子とは、前記地板に実装されたモノポールアンテナで構成され、
前記第1アンテナ装置は、飛翔車両の天頂部に配置され、
前記第2アンテナ装置は、前記飛翔車両の天底部に配置され、
前記第1アンテナ装置および前記第2アンテナ装置における前記地板から見た前記円形配列フェーズドアレーアンテナの立設方向は、反対方向である、
サンドイッチアレー装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019153913 | 2019-08-26 | ||
| JP2019153913 | 2019-08-26 | ||
| PCT/JP2020/030389 WO2021039362A1 (ja) | 2019-08-26 | 2020-08-07 | アンテナ装置およびサンドイッチアレー装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2021039362A1 JPWO2021039362A1 (ja) | 2021-03-04 |
| JP7624726B2 true JP7624726B2 (ja) | 2025-01-31 |
Family
ID=74684534
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021542702A Active JP7624726B2 (ja) | 2019-08-26 | 2020-08-07 | アンテナ装置およびサンドイッチアレー装置 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP7624726B2 (ja) |
| WO (1) | WO2021039362A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113406561A (zh) * | 2021-05-31 | 2021-09-17 | 中国电子科技集团公司第三十六研究所 | 一种测向方法和装置 |
| US12334639B2 (en) * | 2023-05-11 | 2025-06-17 | Eduard Levin | Low-profile wideband antenna with controlled radiation pattern |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001024431A (ja) | 1999-07-08 | 2001-01-26 | Atr Adaptive Communications Res Lab | アレーアンテナ装置 |
| JP2004214863A (ja) | 2002-12-27 | 2004-07-29 | Murata Mfg Co Ltd | アンテナ装置および通信端末装置 |
| JP2019039920A (ja) | 2017-08-25 | 2019-03-14 | 国立大学法人富山大学 | 方向推定装置および方向推定方法 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CA1239223A (en) * | 1984-07-02 | 1988-07-12 | Robert Milne | Adaptive array antenna |
-
2020
- 2020-08-07 WO PCT/JP2020/030389 patent/WO2021039362A1/ja not_active Ceased
- 2020-08-07 JP JP2021542702A patent/JP7624726B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001024431A (ja) | 1999-07-08 | 2001-01-26 | Atr Adaptive Communications Res Lab | アレーアンテナ装置 |
| JP2004214863A (ja) | 2002-12-27 | 2004-07-29 | Murata Mfg Co Ltd | アンテナ装置および通信端末装置 |
| JP2019039920A (ja) | 2017-08-25 | 2019-03-14 | 国立大学法人富山大学 | 方向推定装置および方向推定方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2021039362A1 (ja) | 2021-03-04 |
| JPWO2021039362A1 (ja) | 2021-03-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11967776B2 (en) | Lens antenna system | |
| US9917374B2 (en) | Dual-band phased array antenna with built-in grating lobe mitigation | |
| Sharawi et al. | Design and implementation of embedded printed antenna arrays in small UAV wing structures | |
| US11289807B2 (en) | Three-dimensional phased array antenna | |
| EP1157446B1 (en) | Volumetric phased array antenna system | |
| US10749258B1 (en) | Antenna system and method for a digitally beam formed intersecting fan beam | |
| JP7624726B2 (ja) | アンテナ装置およびサンドイッチアレー装置 | |
| JP2022543045A (ja) | 屈折率分布型レンズに基づく通信システム | |
| US20190131705A1 (en) | User insensitive phased antenna array devices, systems, and methods | |
| CN114879147A (zh) | 毫米波雷达和无人飞行器 | |
| Vani et al. | Design approach of multibeam using phased array antenna aided with butler matrix for a fixed coverage area | |
| US10804600B2 (en) | Antenna and radiator configurations producing magnetic walls | |
| Cheng et al. | Satellite ground stations with electronic beam steering | |
| Pires et al. | 3D antenna array for SWIPT sensing with WPT capabilities | |
| JP2012124902A (ja) | マルチビームアンテナシステム | |
| JPS6376504A (ja) | 空中線装置 | |
| JPS60119482A (ja) | レ−ダ装置 | |
| KR20200055646A (ko) | 광시야각을 갖는 mimo 안테나 어레이 | |
| JP7817916B2 (ja) | 電子機器及び送受信システム | |
| Buchanan et al. | Investigation of the Sum-Difference Beampatterns Using the Quadratic U Distribution | |
| Collodi et al. | Precise Indoor Positioning with a Dodecahedron Sequential Rotation Antenna Array Designed for Space Division Multiple Access | |
| Hahn et al. | Evaluation of the Beamforming Performance of a 4-Port Multi-Mode Antenna for Integrated Sensing and Communication Applications | |
| Sahin et al. | A Multi-Functional Reconfigurable Intelligent Surface with Integrated Sensing Capability | |
| Cheng et al. | Interference suppression and electronic tracking using antenna arrays at satellite ground stations | |
| Apostolov et al. | A Study of Spatial Filter Banks with a Luneburg Lens |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230718 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240820 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20241016 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20241224 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250114 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7624726 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |