本開示の一態様に係る三次元データ符号化方法は、パラメータを用いて複数の三次元点の複数の属性情報を符号化し、符号化された前記複数の属性情報、及び、前記パラメータを含むビットストリームを生成し、前記複数の属性情報のそれぞれは、1以上の階層のいずれかに属し、前記複数の三次元点のそれぞれは、1以上の領域のいずれかに属し、前記パラメータは、前記符号化の対象となる属性情報が属する階層、及び、前記符号化の対象となる属性情報を有する三次元点が属する領域に応じて定められ、前記ビットストリームに含まれる前記パラメータは、所定の基準値と、前記階層毎に定められる第1差分値と、前記領域毎に定められる第2差分値とを含む。
これによれば、三次元データ符号化方法は、ビットストリームにおいて、パラメータを所定の基準値と、階層毎に定められる第1差分値と、領域毎に定められる第2差分値とで示すため、符号化効率を向上できる。
例えば、前記複数の属性情報のそれぞれは、さらに、1以上のスライスのいずれかに属し、前記パラメータは、前記符号化の対象となる属性情報が属するスライスに応じて定められ、前記ビットストリームに含まれる前記パラメータは、さらに、前記スライス毎に定められる第3差分値を含んでもよい。
これによれば、三次元データ符号化方法は、ビットストリームにおいて、パラメータを所定の基準値と、階層毎に定められる第1差分値と、領域毎に定められる第2差分値と、前記スライス毎に定められる第3差分値で示すため、符号化効率を向上できる。
例えば、前記複数の属性情報のそれぞれは、さらに、1以上のフレームのいずれかに属し、前記パラメータは、前記符号化の対象となる属性情報が属するフレームに応じて定められ、前記ビットストリームに含まれる前記パラメータは、さらに、前記フレーム毎に定められる第4差分値を含んでもよい。
これによれば、三次元データ符号化方法は、ビットストリームにおいて、パラメータを所定の基準値と、階層毎に定められる第1差分値と、領域毎に定められる第2差分値と、前記フレーム毎に定められる前記第4差分値で示すため、符号化効率を向上できる。
例えば、前記1以上の領域のうちの第1領域は、前記1以上のスライスのうちの第1スライスに属し、前記第1領域の原点座標は、前記第1スライスの原点座標を基準とした座標であってもよい。
このため、第1領域の原点座標を、第1スライスの原点座標とその差分値とで示すため、符号化効率を向上できる。
また、本開示の一態様に係る三次元データ復号方法は、ビットストリームを取得することで、符号化された複数の属性情報、及び、パラメータを取得し、前記パラメータを用いて前記符号化された複数の属性情報を復号し、前記複数の属性情報は、複数の三次元点の属性情報であり、前記複数の属性情報のそれぞれは、1以上の階層のいずれかに属し、前記複数の三次元点のそれぞれは、1以上の領域のいずれかに属し、前記パラメータは、前記符号化の対象となる属性情報が属する階層、及び、前記符号化の対象となる属性情報を有する三次元点が属する領域に応じて定められ、前記ビットストリームに含まれる前記パラメータは、所定の基準値と、前記階層毎に定められる第1差分値と、前記領域毎に定められる第2差分値とを含む。
このため、三次元データ復号方法は、三次元点の属性情報を正しく復号できる。
例えば、前記複数の属性情報のそれぞれは、さらに、1以上のスライスのいずれかに属し、前記パラメータは、前記復号の対象となる属性情報が属するスライスに応じて定められ、前記ビットストリームに含まれる前記パラメータは、さらに、前記スライス毎に定められる第3差分値を含んでもよい。
このため、三次元データ復号方法は、三次元点の属性情報を正しく復号できる。
例えば、前記複数の属性情報のそれぞれは、さらに、1以上のフレームのいずれかに属し、前記パラメータは、前記復号の対象となる属性情報が属するフレームに応じて定められ、前記ビットストリームに含まれる前記パラメータは、さらに、前記フレーム毎に定められる第4差分値を含んでもよい。
このため、三次元データ復号方法は、三次元点の属性情報を正しく復号できる。
例えば、前記1以上の領域のうちの第1領域は、前記1以上のスライスのうちの第1スライスに属し、前記第1領域の原点座標は、前記第1スライスの原点座標を基準とした座標であってもよい。
このため、三次元データ復号方法は、第1領域の原点座標を正しく復号できる。
なお、これらの包括的または具体的な態様は、システム、方法、集積回路、コンピュータプログラムまたはコンピュータ読み取り可能なCD-ROMなどの記録媒体で実現されてもよく、システム、方法、集積回路、コンピュータプログラム及び記録媒体の任意な組み合わせで実現されてもよい。
以下、実施の形態について、図面を参照しながら具体的に説明する。なお、以下で説明する実施の形態は、いずれも本開示の一具体例を示すものである。以下の実施の形態で示される数値、形状、材料、構成要素、構成要素の配置位置及び接続形態、ステップ、ステップの順序などは、一例であり、本開示を限定する主旨ではない。また、以下の実施の形態における構成要素のうち、独立請求項に記載されていない構成要素については、任意の構成要素として説明される。
(実施の形態1)
まず、本実施の形態に係る符号化三次元データ(以下、符号化データとも記す)のデータ構造について説明する。図1は、本実施の形態に係る符号化三次元データの構成を示す図である。
本実施の形態では、三次元空間は、動画像の符号化におけるピクチャに相当するスペース(SPC)に分割され、スペースを単位として三次元データが符号化される。スペースは、さらに、動画像符号化におけるマクロブロックなどに相当するボリューム(VLM)に分割され、VLMを単位として予測及び変換が行われる。ボリュームは、位置座標が対応付けられる最小単位である複数のボクセル(VXL)を含む。なお、予測とは、二次元画像で行われる予測と同様に、他の処理単位を参照し、処理対象の処理単位と類似する予測三次元データを生成し、当該予測三次元データと処理対象の処理単位との差分を符号化することである。また、この予測は、同一時刻の他の予測単位を参照する空間予測のみならず、異なる時刻の予測単位を参照する時間予測を含む。
例えば、三次元データ符号化装置(以下、符号化装置とも記す)は、ポイントクラウドなどの点群データにより表現される三次元空間を符号化する際には、ボクセルのサイズに応じて、点群の各点、又は、ボクセル内に含まれる複数点をまとめて符号化する。ボクセルを細分化すれば点群の三次元形状を高精度に表現でき、ボクセルのサイズを大きくすれば点群の三次元形状をおおまかに表現できる。
なお、以下では、三次元データがポイントクラウドである場合を例に説明を行うが、三次元データはポイントクラウドに限定されず、任意の形式の三次元データでよい。
また、階層構造のボクセルを用いてもよい。この場合、n次の階層では、n-1次以下の階層(n次の階層の下層)にサンプル点が存在するかどうかを順に示してもよい。例えば、n次の階層のみを復号する際において、n-1次以下の階層にサンプル点が存在する場合は、n次階層のボクセルの中心にサンプル点が存在するとみなして復号できる。
また、符号化装置は、点群データを、距離センサ、ステレオカメラ、単眼カメラ、ジャイロ、又は慣性センサなどを用いて取得する。
スペースは、動画像の符号化と同様に、単独で復号可能なイントラ・スペース(I-SPC)、単方向の参照のみ可能なプレディクティブ・スペース(P-SPC)、及び、双方向の参照が可能なバイディレクショナル・スペース(B-SPC)を含む少なくとも3つの予測構造のいずれかに分類される。また、スペースは復号時刻と表示時刻との2種類の時刻情報を有する。
また、図1に示すように、複数のスペースを含む処理単位として、ランダムアクセス単位であるGOS(Group Of Space)が存在する。さらに、複数のGOSを含む処理単位としてワールド(WLD)が存在する。
ワールドが占める空間領域は、GPS又は緯度及び経度情報などにより、地球上の絶対位置と対応付けられる。この位置情報はメタ情報として格納される。なお、メタ情報は、符号化データに含まれてもよいし、符号化データとは別に伝送されてもよい。
また、GOS内では、全てのSPCが三次元的に隣接してもよいし、他のSPCと三次元的に隣接しないSPCが存在してもよい。
なお、以下では、GOS、SPC又はVLM等の処理単位に含まれる三次元データに対する、符号化、復号又は参照等の処理を、単に、処理単位を符号化、復号又は参照する等とも記す。また、処理単位に含まれる三次元データは、例えば、三次元座標等の空間位置と、色情報等の特性値との少なくとも一つの組を含む。
次に、GOSにおけるSPCの予測構造について説明する。同一GOS内の複数のSPC、又は、同一SPC内の複数のVLMは、互いに異なる空間を占めるが、同じ時刻情報(復号時刻及び表示時刻)を持つ。
また、GOS内で復号順で先頭となるSPCはI-SPCである。また、GOSにはクローズドGOSとオープンGOSとの2種類が存在する。クローズドGOSは、先頭I-SPCから復号開始する際に、GOS内の全てのSPCを復号できるGOSである。オープンGOSでは、GOS内で先頭I-SPCよりも表示時刻が前となる一部のSPCは異なるGOSを参照しており、当該GOSのみで復号を行うことができない。
なお、地図情報などの符号化データでは、WLDを符号化順とは逆方向から復号することがあり、GOS間に依存性があると逆方向再生が困難である。よって、このような場合には、基本的にはクローズドGOSが用いられる。
また、GOSは、高さ方向にレイヤ構造を有し、下のレイヤのSPCから順に符号化又は復号が行われる。
図2はGOSの最下層レイヤに属するSPC間の予測構造の一例を示す図である。図3はレイヤ間の予測構造の一例を示す図である。
GOS内には1つ以上のI-SPCが存在する。三次元空間内には、ヒト、動物、車、自転車、信号、又はランドマークとなる建物などのオブジェクトが存在するが、特にサイズが小さいオブジェクトはI-SPCとして符号化すると有効である。例えば、三次元データ復号装置(以下、復号装置とも記す)は、GOSを低処理量又は高速に復号する際には、GOS内のI-SPCのみを復号する。
また、符号化装置は、WLD内のオブジェクトの粗密さに応じてI-SPCの符号化間隔又は出現頻度を切替えてもよい。
また、図3に示す構成において、符号化装置又は復号装置は、複数のレイヤを下層(レイヤ1)から順に符号化又は復号する。これにより、例えば自動走行車などにとってより情報量の多い地面付近のデータの優先度を上げることができる。
なお、ドローンなどで用いられる符号化データでは、GOS内において高さ方向で上のレイヤのSPCから順に符号化又は復号してもよい。
また、符号化装置又は復号装置は、復号装置が荒くGOSを把握でき、徐々に解像度を上げるようにできるように、複数のレイヤを符号化又は復号してもよい。例えば、符号化装置又は復号装置は、レイヤ3、8、1、9…の順に符号化又は復号してもよい。
次に、静的オブジェクト及び動的オブジェクトの扱い方について説明する。
三次元空間には、建物又は道路など静的なオブジェクト又はシーン(以降、まとめて静的オブジェクトと呼ぶ)と、車又はヒトなどの動的なオブジェクト(以降、動的オブジェクトと呼ぶ)とが存在する。オブジェクトの検出は、ポイントクラウドのデータ、又は、ステレオカメラなどのカメラ映像などから特徴点を抽出するなどして、別途行われる。ここでは、動的オブジェクトの符号化方法の例について説明する。
第1方法は、静的オブジェクトと動的オブジェクトとを区別せずに符号化する方法である。第2方法は、静的オブジェクトと動的オブジェクトとを識別情報により区別する方法である。
例えば、GOSが識別単位として用いられる。この場合、静的オブジェクトを構成するSPCを含むGOSと、動的オブジェクトを構成するSPCを含むGOSとが、符号化データ内、又は符号化データとは別途格納される識別情報により区別される。
または、SPCが識別単位として用いられてもよい。この場合、静的オブジェクトを構成するVLMを含むSPCと、動的オブジェクトを構成するVLMを含むSPCとが、上記識別情報により区別される。
または、VLM或いはVXLが識別単位として用いられてもよい。この場合、静的オブジェクトを含むVLM又はVXLと、動的オブジェクトを含むVLM又はVXLとが上記識別情報により区別される。
また、符号化装置は、動的オブジェクトを1以上のVLM又はSPCとして符号化し、静的オブジェクトを含むVLM又はSPCと、動的オブジェクトを含むSPCとを、互いに異なるGOSとして符号化してもよい。また、符号化装置は、動的オブジェクトのサイズに応じてGOSのサイズが可変となる場合には、GOSのサイズをメタ情報として別途格納する。
また、符号化装置は、静的オブジェクトと動的オブジェクトとを互いに独立に符号化し、静的オブジェクトから構成されるワールドに対して、動的オブジェクトを重畳してもよい。このとき、動的オブジェクトは1以上のSPCから構成され、各SPCは、当該SPCが重畳される静的オブジェクトを構成する1以上のSPCに対応付けられる。なお、動的オブジェクトをSPCではなく、1以上のVLM又はVXLにより表現してもよい。
また、符号化装置は、静的オブジェクトと動的オブジェクトとを互いに異なるストリームとして符号化してもよい。
また、符号化装置は、動的オブジェクトを構成する1以上のSPCを含むGOSを生成してもよい。さらに、符号化装置は、動的オブジェクトを含むGOS(GOS_M)と、GOS_Mの空間領域に対応する静的オブジェクトのGOSとを同一サイズ(同一の空間領域を占める)に設定してもよい。これにより、GOS単位で重畳処理を行うことができる。
動的オブジェクトを構成するP-SPC又はB-SPCは、符号化済みの異なるGOSに含まれるSPCを参照してもよい。動的オブジェクトの位置が時間的に変化し、同一の動的オブジェクトが異なる時刻のGOSとして符号化されるケースでは、GOSを跨いだ参照が圧縮率の観点から有効となる。
また、符号化データの用途に応じて、上記の第1方法と第2方法とを切替えてもよい。例えば、符号化三次元データを地図として用いる場合は、動的オブジェクトを分離できることが望ましいため、符号化装置は、第2方法を用いる。一方、符号化装置は、コンサート又はスポーツなどのイベントの三次元データを符号化する場合に、動的オブジェクトを分離する必要がなければ、第1方法を用いる。
また、GOS又はSPCの復号時刻と表示時刻とは符号化データ内、又はメタ情報として格納できる。また、静的オブジェクトの時刻情報は全て同一としてもよい。このとき、実際の復号時刻と表示時刻は、復号装置が決定するものとしてもよい。あるいは、復号時刻として、GOS、あるいは、SPC毎に異なる値が付与され、表示時刻として全て同一の値が付与されてもよい。さらに、HEVCのHRD(Hypothetical Reference Decoder)など動画像符号化におけるデコーダモデルのように、デコーダが所定のサイズのバッファを有し、復号時刻に従って所定のビットレートでビットストリームを読み込めば破綻なく復号できることを保証するモデルを導入してもよい。
次に、ワールド内におけるGOSの配置について説明する。ワールドにおける三次元空間の座標は、互いに直交する3本の座標軸(x軸、y軸、z軸)により表現される。GOSの符号化順に所定のルールを設けることで、空間的に隣接するGOSが符号化データ内で連続するように符号化を行える。例えば、図4に示す例では、xz平面内のGOSを連続的に符号化する。あるxz平面内の全てのGOSの符号化終了後にy軸の値を更新する。すなわち、符号化が進むにつれて、ワールドはy軸方向に伸びていく。また、GOSのインデックス番号は符号化順に設定される。
ここで、ワールドの三次元空間は、GPS、或いは緯度及び経度などの地理的な絶対座標と1対1に対応付けておく。或いは、予め設定した基準位置からの相対位置により三次元空間が表現されてもよい。三次元空間のx軸、y軸、z軸の方向は、緯度及び経度などに基づいて決定される方向ベクトルとして表現され、当該方向ベクトルはメタ情報として符号化データと共に格納される。
また、GOSのサイズは固定とし、符号化装置は、当該サイズをメタ情報として格納する。また、GOSのサイズは、例えば、都市部か否か、又は、室内か外かなどに応じて切替えられてもよい。つまり、GOSのサイズは、情報としての価値があるオブジェクトの量又は性質に応じて切替えられてもよい。あるいは、符号化装置は、同一ワールド内において、オブジェクトの密度などに応じて、GOSのサイズ、又は、GOS内のI-SPCの間隔を適応的に切替えてもよい。例えば、符号化装置は、オブジェクトの密度が高いほど、GOSのサイズを小さくし、GOS内のI-SPCの間隔を短くする。
図5の例では、3番目から10番目のGOSの領域では、オブジェクトの密度が高いため、細かい粒度でのランダムアクセスを実現するために、GOSが細分化されている。なお、7番目から10番目のGOSは、それぞれ、3番目から6番目のGOSの裏側に存在する。
(実施の形態2)
本実施の形態では、車両間での三次元データを送受信する方法について説明する。
図7は、自車両600と周辺車両601との間での三次元データ607の送受信の様子を示す模式図である。
自車両600に搭載されたセンサ(レンジファインダなどの距離センサ、ステレオカメラ、又は複数の単眼カメラの組合せなど)により三次元データを取得する場合、周辺車両601などの障害物により自車両600のセンサ検知範囲602内であるものの三次元データを作成できない領域(以降、これをオクルージョン領域604という)が発生する。また、三次元データを取得する空間が大きくなると自律動作の精度が高まるが、自車両600のみのセンサ検知範囲は有限である。
自車両600のセンサ検知範囲602は、三次元データを取得可能な領域603とオクルージョン領域604とを含む。自車両600が、三次元データを取得したい範囲は、自車両600のセンサ検知範囲602とそれ以外の領域とを含む。また、周辺車両601のセンサ検知範囲605は、オクルージョン領域604と、自車両600のセンサ検知範囲602に含まれない領域606とを含む。
周辺車両601は、周辺車両601が検知した情報を自車両600に伝送する。自車両600は、前走車などの周辺車両601が検知した情報を取得することで、オクルージョン領域604、及び、自車両600のセンサ検知範囲602以外の領域606の三次元データ607を取得することが可能となる。自車両600は、周辺車両601が取得した情報を用いて、オクルージョン領域604及びセンサ検知範囲外の領域606の三次元データを補完する。
車両、又はロボットの自律動作における三次元データの用途は、自己位置推定、周辺状況の検知、またはその両方である。例えば、自己位置推定には、自車両600のセンサ情報に基づき自車両600で生成した三次元データが使用される。周辺状況の検知には、自車両600で生成した三次元データに加え、周辺車両601から取得した三次元データも使用される。
三次元データ607を自車両600に伝送する周辺車両601は、自車両600の状態に応じて決定されてもよい。例えば、この周辺車両601は、自車両600の直進時には前走車であり、自車両600の右折時には対向車であり、自車両600の後退時には後方車である。また、自車両600のドライバが、三次元データ607を自車両600に伝送する周辺車両601を直接指定してもよい。
また、自車両600は、三次元データ607を取得したい空間内に含まれる、自車両600で取得できない領域の三次元データを所有している周辺車両601を探索してもよい。自車両600で取得できない領域とは、オクルージョン領域604又はセンサ検知範囲602外の領域606などである。
また、自車両600は、オクルージョン領域604を自車両600のセンサ情報に基づいて特定してもよい。例えば、自車両600は、自車両600のセンサ検知範囲602内に含まれる、三次元データを作成できない領域をオクルージョン領域604であると特定する。
以下、三次元データ607を伝送するのが前走車である場合の動作例を説明する。図8は、この場合の伝送される三次元データの一例を示す図である。
図8に示すように、前走車から伝送される三次元データ607は、例えば、ポイントクラウドのスパースワールド(SWLD)である。つまり、前走車は、当該前走車のセンサで検知した情報からWLDの三次元データ(ポイントクラウド)を作成し、WLDの三次元データから特徴量が閾値以上のデータを抽出することでSWLDの三次元データ(ポイントクラウド)を作成する。そして、前走車は、作成したSWLDの三次元データを自車両600に伝送する。
自車両600は、SWLDを受け取り、自車両600で作成したポイントクラウドに、受け取ったSWLDをマージする。
伝送されるSWLDは絶対座標(三次元マップの座標系におけるSWLDの位置)の情報を持っている。自車両600は、この絶対座標に基づいて、自車両600で生成したポイントクラウドを上書きすることによりマージ処理を実現できる。
周辺車両601から伝送されるSWLDは、自車両600のセンサ検知範囲602外かつ周辺車両601のセンサ検知範囲605内の領域606のSWLD、或いは、自車両600にとってのオクルージョン領域604のSWLD、又は、その両方のSWLDでもよい。また、伝送されるSWLDは、上記のSWLDのうち、周辺車両601が周辺状況の検知に使用している領域のSWLDでもよい。
また、周辺車両601は、自車両600と周辺車両601との速度差に基づく通信可能時間に応じて、伝送されるポイントクラウドの密度を変化させてもよい。例えば、速度差が大きく通信可能時間が短い場合は、周辺車両601は、SWLDの中から、特徴量の大きな三次元点を抽出することで、ポイントクラウドの密度(データ量)を低くしてもよい。
また、周辺状況の検知とは、人、車両、及び道路工事用の機材などの存在の有無を判定し、その種類を特定し、その位置、移動方向、及び移動速度などを検知することである。
また、自車両600は、周辺車両601で生成された三次元データ607の代わりに、又は、三次元データ607に加え、周辺車両601の制動情報を取得してもよい。ここで、周辺車両601の制動情報とは、例えば、周辺車両601のアクセル或いはブレーキが踏まれたこと、又はその度合いを示す情報である。
また、各車両で生成されるポイントクラウドでは、車両間の低遅延通信を考慮して、ランダムアクセス単位に三次元空間が細分化される。一方で、サーバからダウンロードされる地図データである三次元地図等は、三次元空間が、車両間通信の場合と比べて大きなランダムアクセス単位に分割される。
前走車の前方の領域又は後走車の後方の領域などのオクルージョン領域になりやすい領域のデータは低遅延向けデータとして、細かいランダムアクセス単位に分割される。
高速走行時には正面の重要性が高まるため、各車両は、高速走行時には、視野角を狭めた範囲のSWLDを細かいランダムアクセス単位で作成する。
前走車が伝送用に作成したSWLD内に自車両600でポイントクラウドの取得が可能な領域が含まれる場合、前走車は、その領域のポイントクラウドを取り除くことにより伝送量を削減してもよい。
(実施の形態3)
本実施の形態では、後続車両への三次元データ送信方法等について説明する。図9は、後続車両等に送信する三次元データの対象空間の例を示す図である。
車両801は、車両801の前方の車両801から距離Lにある幅W、高さH、深さDの直方体の空間802に含まれるポイントクラウド(点群)等の三次元データを、Δtの時間間隔で、道路状況を監視する交通監視クラウド又は後続車両へ送信する。
車両801は、外部から空間802に車両又は人が進入するなどして過去に送信済みの空間802に含まれる三次元データに変化が生じた場合には、変化が生じた空間の三次元データについても送信する。
なお、図9では、空間802の形状が直方体である例を示すが、空間802は、後続車両から死角となっている前方道路上の空間を含んでいればよく、必ずしも直方体でなくてもよい。
距離Lは、三次元データを受信した後続車両が安全に停止できる距離に設定されることが望ましい。例えば、距離Lは、後続車両が、三次元データの受信に要する間に移動する距離と、後続車両が、受信したデータに応じて減速を開始するまでに移動する距離と、後続車両が原則を開始してから安全に停止するのに要する距離との和に設定される。これらの距離は速度に応じて変化するので、L=a×V+b(a、bは定数)のように、距離Lが車両の速度Vに応じて変化してもよい。
幅Wは、少なくとも車両801が走行している車線の幅よりも大きな値に設定される。更に望ましくは、幅Wは、左右の車線或いは路側帯など、隣接する空間が含まれる大きさに設定される。
深さDは固定値でも良いが、D=c×V+d(c、dは定数)のように、車両の速度Vに応じて変化してもよい。また、D>V×ΔtとなるようにDを設定することで、送信する空間を過去に送信済みの空間と重複させることができる。これにより、車両801は、より確実に走路上の空間を漏れなく後続車両等に送信することができる。
このように、車両801が送信する三次元データを後続車両にとって有用な空間に限定することで、送信する三次元データの容量を効果的に削減でき、通信の低遅延化及び低コスト化を実現できる。
(実施の形態4)
実施の形態3において、車両等のクライアント装置が、他の車両又は交通監視クラウド等のサーバに三次元データを送信する例を説明した。本実施の形態では、クライアント装置は、サーバ又は他のクライアント装置にセンサで得られたセンサ情報を送信する。
まず、本実施の形態に係るシステムの構成を説明する。図10は、本実施の形態に係る三次元マップ及びセンサ情報の送受信システムの構成を示す図である。このシステムは、サーバ901と、クライアント装置902A及び902Bを含む。なお、クライアント装置902A及び902Bを特に区別しない場合には、クライアント装置902とも記す。
クライアント装置902は、例えば、車両等の移動体に搭載される車載機器である。サーバ901は、例えば、交通監視クラウド等であり、複数のクライアント装置902と通信可能である。
サーバ901は、クライアント装置902に、ポイントクラウドから構成される三次元マップを送信する。なお、三次元マップの構成はポイントクラウドに限定されず、メッシュ構造等、他の三次元データを表すものであってもよい。
クライアント装置902は、サーバ901に、クライアント装置902が取得したセンサ情報を送信する。センサ情報は、例えば、LiDAR取得情報、可視光画像、赤外画像、デプス画像、センサ位置情報及び速度情報のうち少なくとも一つを含む。
サーバ901とクライアント装置902との間で送受信されるデータは、データ削減のために圧縮されてもよいし、データの精度を維持するために非圧縮のままでも構わない。データを圧縮する場合、ポイントクラウドには例えば8分木構造に基づく三次元圧縮方式を用いることができる。また、可視光画像、赤外画像、及びデプス画像には二次元の画像圧縮方式を用いることできる。二次元の画像圧縮方式とは、例えば、MPEGで規格化されたMPEG-4 AVC又はHEVC等である。
また、サーバ901は、クライアント装置902からの三次元マップの送信要求に応じてサーバ901で管理する三次元マップをクライアント装置902に送信する。なお、サーバ901はクライアント装置902からの三次元マップの送信要求を待たずに三次元マップを送信してもよい。例えば、サーバ901は、予め定められた空間にいる1つ以上のクライアント装置902に三次元マップをブロードキャストしても構わない。また、サーバ901は、一度送信要求を受けたクライアント装置902に、一定時間毎にクライアント装置902の位置に適した三次元マップを送信してもよい。また、サーバ901は、サーバ901が管理する三次元マップが更新される度にクライアント装置902に三次元マップを送信してもよい。
クライアント装置902は、サーバ901に三次元マップの送信要求を出す。例えば、クライアント装置902が、走行時に自己位置推定を行いたい場合に、クライアント装置902は、三次元マップの送信要求をサーバ901に送信する。
なお、次のような場合に、クライアント装置902はサーバ901に三次元マップの送信要求を出してもよい。クライアント装置902の保持する三次元マップが古い場合に、クライアント装置902はサーバ901に三次元マップの送信要求を出してもよい。例えば、クライアント装置902が三次元マップを取得してから一定期間が経過した場合に、クライアント装置902はサーバ901に三次元マップの送信要求を出してもよい。
クライアント装置902が保持する三次元マップで示される空間から、クライアント装置902が外に出る一定時刻前に、クライアント装置902はサーバ901に三次元マップの送信要求を出してもよい。例えば、クライアント装置902が、クライアント装置902が保持する三次元マップで示される空間の境界から予め定められた距離以内に存在する場合に、クライアント装置902はサーバ901に三次元マップの送信要求を出してもよい。また、クライアント装置902の移動経路及び移動速度が把握できている場合には、これらに基づき、クライアント装置902が保持する三次元マップで示される空間から、クライアント装置902が外に出る時刻を予測してもよい。
クライアント装置902がセンサ情報から作成した三次元データと三次元マップとの位置合せ時の誤差が一定以上の場合に、クライアント装置902はサーバ901に三次元マップの送信要求を出してもよい。
クライアント装置902は、サーバ901から送信されたセンサ情報の送信要求に応じて、サーバ901にセンサ情報を送信する。なお、クライアント装置902はサーバ901からのセンサ情報の送信要求を待たずにセンサ情報をサーバ901に送ってもよい。例えば、クライアント装置902は、一度サーバ901からセンサ情報の送信要求を得た場合、一定期間の間、定期的にセンサ情報をサーバ901に送信してもよい。また、クライアント装置902は、クライアント装置902がセンサ情報を元に作成した三次元データと、サーバ901から得た三次元マップとの位置合せ時の誤差が一定以上の場合、クライアント装置902の周辺の三次元マップに変化が生じた可能性があると判断し、その旨とセンサ情報とをサーバ901に送信してもよい。
サーバ901は、クライアント装置902にセンサ情報の送信要求を出す。例えば、サーバ901は、クライアント装置902から、GPS等のクライアント装置902の位置情報を受信する。サーバ901は、クライアント装置902の位置情報に基づき、サーバ901が管理する三次元マップにおいて情報が少ない空間にクライアント装置902が近づいていると判断した場合、新たな三次元マップを生成するためにクライアント装置902にセンサ情報の送信要求を出す。また、サーバ901は、三次元マップを更新したい場合、積雪時或いは災害時などの道路状況を確認したい場合、渋滞状況、或いは事件事故状況等を確認したい場合に、センサ情報の送信要求を出してもよい。
また、クライアント装置902は、サーバ901から受け取るセンサ情報の送信要求の受信時における通信状態又は帯域に応じて、サーバ901に送信するセンサ情報のデータ量を設定してもよい。サーバ901に送信するセンサ情報のデータ量を設定するというのは、例えば、当該データそのものを増減させること、又は圧縮方式を適宜選択することである。
図11は、クライアント装置902の構成例を示すブロック図である。クライアント装置902は、サーバ901からポイントクラウド等で構成される三次元マップを受信し、クライアント装置902のセンサ情報に基づいて作成した三次元データからクライアント装置902の自己位置を推定する。また、クライアント装置902は、取得したセンサ情報をサーバ901に送信する。
クライアント装置902は、データ受信部1011と、通信部1012と、受信制御部1013と、フォーマット変換部1014と、複数のセンサ1015と、三次元データ作成部1016と、三次元画像処理部1017と、三次元データ蓄積部1018と、フォーマット変換部1019と、通信部1020と、送信制御部1021と、データ送信部1022とを備える。
データ受信部1011は、サーバ901から三次元マップ1031を受信する。三次元マップ1031は、WLD又はSWLD等のポイントクラウドを含むデータである。三次元マップ1031には、圧縮データ、及び非圧縮データのどちらが含まれていてもよい。
通信部1012は、サーバ901と通信し、データ送信要求(例えば、三次元マップの送信要求)などをサーバ901に送信する。
受信制御部1013は、通信部1012を介して、対応フォーマット等の情報を通信先と交換し、通信先との通信を確立する。
フォーマット変換部1014は、データ受信部1011が受信した三次元マップ1031にフォーマット変換等を行うことで三次元マップ1032を生成する。また、フォーマット変換部1014は、三次元マップ1031が圧縮又は符号化されている場合には、伸張又は復号処理を行う。なお、フォーマット変換部1014は、三次元マップ1031が非圧縮データであれば、伸張又は復号処理を行わない。
複数のセンサ1015は、LiDAR、可視光カメラ、赤外線カメラ、又はデプスセンサなど、クライアント装置902が搭載されている車両の外部の情報を取得するセンサ群であり、センサ情報1033を生成する。例えば、センサ情報1033は、センサ1015がLiDARなどのレーザセンサである場合、ポイントクラウド(点群データ)等の三次元データである。なお、センサ1015は複数でなくてもよい。
三次元データ作成部1016は、センサ情報1033に基づいて自車両の周辺の三次元データ1034を作成する。例えば、三次元データ作成部1016は、LiDARで取得した情報と、可視光カメラで得られた可視光映像とを用いて自車両の周辺の色情報付きのポイントクラウドデータを作成する。
三次元画像処理部1017は、受信したポイントクラウド等の三次元マップ1032と、センサ情報1033から生成した自車両の周辺の三次元データ1034とを用いて、自車両の自己位置推定処理等を行う。なお、三次元画像処理部1017は、三次元マップ1032と三次元データ1034とを合成することで自車両の周辺の三次元データ1035を作成し、作成した三次元データ1035を用いて自己位置推定処理を行ってもよい。
三次元データ蓄積部1018は、三次元マップ1032、三次元データ1034及び三次元データ1035等を蓄積する。
フォーマット変換部1019は、センサ情報1033を、受信側が対応しているフォーマットへ変換することでセンサ情報1037を生成する。なお、フォーマット変換部1019は、センサ情報1037を圧縮又は符号化することでデータ量を削減してもよい。また、フォーマット変換部1019は、フォーマット変換をする必要がない場合は処理を省略してもよい。また、フォーマット変換部1019は、送信範囲の指定に応じて送信するデータ量を制御してもよい。
通信部1020は、サーバ901と通信し、データ送信要求(センサ情報の送信要求)などをサーバ901から受信する。
送信制御部1021は、通信部1020を介して、対応フォーマット等の情報を通信先と交換し、通信を確立する。
データ送信部1022は、センサ情報1037をサーバ901に送信する。センサ情報1037は、例えば、LiDARで取得した情報、可視光カメラで取得した輝度画像、赤外線カメラで取得した赤外画像、デプスセンサで取得したデプス画像、センサ位置情報、及び速度情報など、複数のセンサ1015によって取得した情報を含む。
次に、サーバ901の構成を説明する。図12は、サーバ901の構成例を示すブロック図である。サーバ901は、クライアント装置902から送信されたセンサ情報を受信し、受信したセンサ情報に基づいて三次元データを作成する。サーバ901は、作成した三次元データを用いて、サーバ901が管理する三次元マップを更新する。また、サーバ901は、クライアント装置902からの三次元マップの送信要求に応じて、更新した三次元マップをクライアント装置902に送信する。
サーバ901は、データ受信部1111と、通信部1112と、受信制御部1113と、フォーマット変換部1114と、三次元データ作成部1116と、三次元データ合成部1117と、三次元データ蓄積部1118と、フォーマット変換部1119と、通信部1120と、送信制御部1121と、データ送信部1122とを備える。
データ受信部1111は、クライアント装置902からセンサ情報1037を受信する。センサ情報1037は、例えば、LiDARで取得した情報、可視光カメラで取得した輝度画像、赤外線カメラで取得した赤外画像、デプスセンサで取得したデプス画像、センサ位置情報、及び速度情報などを含む。
通信部1112は、クライアント装置902と通信し、データ送信要求(例えば、センサ情報の送信要求)などをクライアント装置902に送信する。
受信制御部1113は、通信部1112を介して、対応フォーマット等の情報を通信先と交換し、通信を確立する。
フォーマット変換部1114は、受信したセンサ情報1037が圧縮又は符号化されている場合には、伸張又は復号処理を行うことでセンサ情報1132を生成する。なお、フォーマット変換部1114は、センサ情報1037が非圧縮データであれば、伸張又は復号処理を行わない。
三次元データ作成部1116は、センサ情報1132に基づいてクライアント装置902の周辺の三次元データ1134を作成する。例えば、三次元データ作成部1116は、LiDARで取得した情報と、可視光カメラで得られた可視光映像とを用いてクライアント装置902の周辺の色情報付ポイントクラウドデータを作成する。
三次元データ合成部1117は、センサ情報1132を元に作成した三次元データ1134を、サーバ901が管理する三次元マップ1135に合成することで三次元マップ1135を更新する。
三次元データ蓄積部1118は、三次元マップ1135等を蓄積する。
フォーマット変換部1119は、三次元マップ1135を、受信側が対応しているフォーマットへ変換することで三次元マップ1031を生成する。なお、フォーマット変換部1119は、三次元マップ1135を圧縮又は符号化することでデータ量を削減してもよい。また、フォーマット変換部1119は、フォーマット変換をする必要がない場合は処理を省略してもよい。また、フォーマット変換部1119は、送信範囲の指定に応じて送信するデータ量を制御してもよい。
通信部1120は、クライアント装置902と通信し、データ送信要求(三次元マップの送信要求)などをクライアント装置902から受信する。
送信制御部1121は、通信部1120を介して、対応フォーマット等の情報を通信先と交換し、通信を確立する。
データ送信部1122は、三次元マップ1031をクライアント装置902に送信する。三次元マップ1031は、WLD又はSWLD等のポイントクラウドを含むデータである。三次元マップ1031には、圧縮データ、及び非圧縮データのどちらが含まれていてもよい。
次に、クライアント装置902の動作フローについて説明する。図13は、クライアント装置902による三次元マップ取得時の動作を示すフローチャートである。
まず、クライアント装置902は、サーバ901へ三次元マップ(ポイントクラウド等)の送信を要求する(S1001)。このとき、クライアント装置902は、GPS等で得られたクライアント装置902の位置情報を合わせて送信することで、その位置情報に関連する三次元マップの送信をサーバ901に要求してもよい。
次に、クライアント装置902は、サーバ901から三次元マップを受信する(S1002)。受信した三次元マップが圧縮データであれば、クライアント装置902は、受信した三次元マップを復号して非圧縮の三次元マップを生成する(S1003)。
次に、クライアント装置902は、複数のセンサ1015で得られたセンサ情報1033からクライアント装置902の周辺の三次元データ1034を作成する(S1004)。次に、クライアント装置902は、サーバ901から受信した三次元マップ1032と、センサ情報1033から作成した三次元データ1034とを用いてクライアント装置902の自己位置を推定する(S1005)。
図14は、クライアント装置902によるセンサ情報の送信時の動作を示すフローチャートである。まず、クライアント装置902は、サーバ901からセンサ情報の送信要求を受信する(S1011)。送信要求を受信したクライアント装置902は、センサ情報1037をサーバ901に送信する(S1012)。なお、クライアント装置902は、センサ情報1033が複数のセンサ1015で得られた複数の情報を含む場合、各情報を、各情報に適した圧縮方式で圧縮することでセンサ情報1037を生成してもよい。
次に、サーバ901の動作フローについて説明する。図15は、サーバ901によるセンサ情報の取得時の動作を示すフローチャートである。まず、サーバ901は、クライアント装置902へセンサ情報の送信を要求する(S1021)。次に、サーバ901は、当該要求に応じてクライアント装置902から送信されたセンサ情報1037を受信する(S1022)。次に、サーバ901は、受信したセンサ情報1037を用いて三次元データ1134を作成する(S1023)。次に、サーバ901は、作成した三次元データ1134を三次元マップ1135に反映する(S1024)。
図16は、サーバ901による三次元マップの送信時の動作を示すフローチャートである。まず、サーバ901は、クライアント装置902から三次元マップの送信要求を受信する(S1031)。三次元マップの送信要求を受信したサーバ901は、クライアント装置902へ三次元マップ1031を送信する(S1032)。このとき、サーバ901は、クライアント装置902の位置情報に合わせてその付近の三次元マップを抽出し、抽出した三次元マップを送信してもよい。また、サーバ901は、ポイントクラウドで構成される三次元マップを、例えば8分木構造による圧縮方式等を用いて圧縮し、圧縮後の三次元マップを送信してもよい。
以下、本実施の形態の変形例について説明する。
サーバ901は、クライアント装置902から受信したセンサ情報1037を用いてクライアント装置902の位置付近の三次元データ1134を作成する。次に、サーバ901は、作成した三次元データ1134と、サーバ901が管理する同エリアの三次元マップ1135とのマッチングを行うことによって、三次元データ1134と三次元マップ1135との差分を算出する。サーバ901は、差分が予め定められた閾値以上の場合は、クライアント装置902の周辺で何らかの異常が発生したと判断する。例えば、地震等の自然災害によって地盤沈下等が発生した際などに、サーバ901が管理する三次元マップ1135と、センサ情報1037を基に作成した三次元データ1134との間に大きな差が発生することが考えられる。
センサ情報1037は、センサの種類、センサの性能、及びセンサの型番のうち少なくとも一つを示す情報を含んでもよい。また、センサ情報1037に、センサの性能に応じたクラスID等が付加されてもよい。例えば、センサ情報1037がLiDARで取得された情報である場合、数mm単位の精度で情報を取得できるセンサをクラス1、数cm単位の精度で情報を取得できるセンサをクラス2、数m単位の精度で情報を取得できるセンサをクラス3のように、センサの性能に識別子を割り当てることが考えられる。また、サーバ901は、センサの性能情報等を、クライアント装置902の型番から推定してもよい。例えば、クライアント装置902が車両に搭載されている場合、サーバ901は、当該車両の車種からセンサのスペック情報を判断してもよい。この場合、サーバ901は、車両の車種の情報を事前に取得していてもよいし、センサ情報に、当該情報が含まれてもよい。また、サーバ901は取得したセンサ情報1037を用いて、センサ情報1037を用いて作成した三次元データ1134に対する補正の度合いを切り替えてもよい。例えば、センサ性能が高精度(クラス1)である場合、サーバ901は、三次元データ1134に対する補正を行わない。センサ性能が低精度(クラス3)である場合、サーバ901は、三次元データ1134に、センサの精度に応じた補正を適用する。例えば、サーバ901は、センサの精度が低いほど補正の度合い(強度)を強くする。
サーバ901は、ある空間にいる複数のクライアント装置902に同時にセンサ情報の送信要求を出してもよい。サーバ901は、複数のクライアント装置902から複数のセンサ情報を受信した場合に、全てのセンサ情報を三次元データ1134の作成に利用する必要はなく、例えば、センサの性能に応じて、利用するセンサ情報を選択してもよい。例えば、サーバ901は、三次元マップ1135を更新する場合、受信した複数のセンサ情報の中から高精度なセンサ情報(クラス1)を選別し、選別したセンサ情報を用いて三次元データ1134を作成してもよい。
サーバ901は、交通監視クラウド等のサーバのみに限定されず、他のクライアント装置(車載)であってもよい。図17は、この場合のシステム構成を示す図である。
例えば、クライアント装置902Cが近くにいるクライアント装置902Aにセンサ情報の送信要求を出し、クライアント装置902Aからセンサ情報を取得する。そして、クライアント装置902Cは、取得したクライアント装置902Aのセンサ情報を用いて三次元データを作成し、クライアント装置902Cの三次元マップを更新する。これにより、クライアント装置902Cは、クライアント装置902Aから取得可能な空間の三次元マップを、クライアント装置902Cの性能を活かして生成できる。例えば、クライアント装置902Cの性能が高い場合に、このようなケースが発生すると考えられる。
また、この場合、センサ情報を提供したクライアント装置902Aは、クライアント装置902Cが生成した高精度な三次元マップを取得する権利が与えられる。クライアント装置902Aは、その権利に従ってクライアント装置902Cから高精度な三次元マップを受信する。
また、クライアント装置902Cは近くにいる複数のクライアント装置902(クライアント装置902A及びクライアント装置902B)にセンサ情報の送信要求を出してもよい。クライアント装置902A又はクライアント装置902Bのセンサが高性能である場合には、クライアント装置902Cは、この高性能なセンサで得られたセンサ情報を用いて三次元データを作成できる。
図18は、サーバ901及びクライアント装置902の機能構成を示すブロック図である。サーバ901は、例えば、三次元マップを圧縮及び復号する三次元マップ圧縮/復号処理部1201と、センサ情報を圧縮及び復号するセンサ情報圧縮/復号処理部1202とを備える。
クライアント装置902は、三次元マップ復号処理部1211と、センサ情報圧縮処理部1212とを備える。三次元マップ復号処理部1211は、圧縮された三次元マップの符号化データを受信し、符号化データを復号して三次元マップを取得する。センサ情報圧縮処理部1212は、取得したセンサ情報から作成した三次元データの代わりに、センサ情報そのものを圧縮し、圧縮したセンサ情報の符号化データをサーバ901へ送信する。この構成により、クライアント装置902は、三次元マップ(ポイントクラウド等)を復号する処理を行う処理部(装置又はLSI)を内部に保持すればよく、三次元マップ(ポイントクラウド等)の三次元データを圧縮する処理を行う処理部を内部に保持する必要がない。これにより、クライアント装置902のコスト及び消費電力等を抑えることができる。
以上のように、本実施の形態に係るクライアント装置902は、移動体に搭載され、移動体に搭載されたセンサ1015により得られた、移動体の周辺状況を示すセンサ情報1033から、移動体の周辺の三次元データ1034を作成する。クライアント装置902は、作成された三次元データ1034を用いて移動体の自己位置を推定する。クライアント装置902は、取得したセンサ情報1033をサーバ901又は他の移動体902に送信する。
これによれば、クライアント装置902は、センサ情報1033をサーバ901等に送信する。これにより、三次元データを送信する場合に比べて、送信データのデータ量を削減できる可能性がある。また、三次元データの圧縮又は符号化等の処理をクライアント装置902で行う必要がないので、クライアント装置902の処理量を削減できる。よって、クライアント装置902は、伝送されるデータ量の削減、又は、装置の構成の簡略化を実現できる。
また、クライアント装置902は、さらに、サーバ901に三次元マップの送信要求を送信し、サーバ901から三次元マップ1031を受信する。クライアント装置902は、自己位置の推定では、三次元データ1034と三次元マップ1032とを用いて、自己位置を推定する。
また、センサ情報1033は、レーザセンサで得られた情報、輝度画像、赤外画像、デプス画像、センサの位置情報、及びセンサの速度情報のうち少なくとも一つを含む。
また、センサ情報1033は、センサの性能を示す情報を含む。
また、クライアント装置902は、センサ情報1033を符号化又は圧縮し、センサ情報の送信では、符号化又は圧縮後のセンサ情報1037を、サーバ901又は他の移動体902に送信する。これによれば、クライアント装置902は、伝送されるデータ量を削減できる。
例えば、クライアント装置902は、プロセッサと、メモリとを備え、プロセッサは、メモリを用いて、上記の処理を行う。
また、本実施の形態に係るサーバ901は、移動体に搭載されるクライアント装置902と通信可能であり、移動体に搭載されたセンサ1015により得られた、移動体の周辺状況を示すセンサ情報1037をクライアント装置902から受信する。サーバ901は、受信したセンサ情報1037から、移動体の周辺の三次元データ1134を作成する。
これによれば、サーバ901は、クライアント装置902から送信されたセンサ情報1037を用いて三次元データ1134を作成する。これにより、クライアント装置902が三次元データを送信する場合に比べて、送信データのデータ量を削減できる可能性がある。また、三次元データの圧縮又は符号化等の処理をクライアント装置902で行う必要がないので、クライアント装置902の処理量を削減できる。よって、サーバ901は、伝送されるデータ量の削減、又は、装置の構成の簡略化を実現できる。
また、サーバ901は、さらに、クライアント装置902にセンサ情報の送信要求を送信する。
また、サーバ901は、さらに、作成された三次元データ1134を用いて三次元マップ1135を更新し、クライアント装置902からの三次元マップ1135の送信要求に応じて三次元マップ1135をクライアント装置902に送信する。
また、センサ情報1037は、レーザセンサで得られた情報、輝度画像、赤外画像、デプス画像、センサの位置情報、及びセンサの速度情報のうち少なくとも一つを含む。
また、センサ情報1037は、センサの性能を示す情報を含む。
また、サーバ901は、さらに、センサの性能に応じて、三次元データを補正する。これによれば、当該三次元データ作成方法は、三次元データの品質を向上できる。
また、サーバ901は、センサ情報の受信では、複数のクライアント装置902から複数のセンサ情報1037を受信し、複数のセンサ情報1037に含まれるセンサの性能を示す複数の情報に基づき、三次元データ1134の作成に用いるセンサ情報1037を選択する。これによれば、サーバ901は、三次元データ1134の品質を向上できる。
また、サーバ901は、受信したセンサ情報1037を復号又は伸張し、復号又は伸張後のセンサ情報1132から、三次元データ1134を作成する。これによれば、サーバ901は、伝送されるデータ量を削減できる。
例えば、サーバ901は、プロセッサと、メモリとを備え、プロセッサは、メモリを用いて、上記の処理を行う。
(実施の形態5)
本実施の形態では、上記実施の形態4の変形例について説明する。図19は、本実施の形態に係るシステムの構成を示す図である。図19に示すシステムは、サーバ2001と、クライアント装置2002Aと、クライアント装置2002Bとを含む。
クライアント装置2002A及びクライアント装置2002Bは、車両等の移動体に搭載され、センサ情報をサーバ2001に送信する。サーバ2001は、三次元マップ(ポイントクラウド)をクライアント装置2002A及びクライアント装置2002Bに送信する。
クライアント装置2002Aは、センサ情報取得部2011と、記憶部2012と、データ送信可否判定部2013とを備える。なお、クライアント装置2002Bの構成も同様である。また、以下ではクライアント装置2002Aとクライアント装置2002Bとを特に区別しない場合には、クライアント装置2002とも記載する。
図20は、本実施の形態に係るクライアント装置2002の動作を示すフローチャートである。
センサ情報取得部2011は、移動体に搭載されたセンサ(センサ群)を用いて各種センサ情報を取得する。つまり、センサ情報取得部2011は、移動体に搭載されたセンサ(センサ群)により得られた、移動体の周辺状況を示すセンサ情報を取得する。また、センサ情報取得部2011は、取得したセンサ情報を記憶部2012に記憶する。このセンサ情報は、LiDAR取得情報、可視光画像、赤外画像及びデプス画像の少なくとも一つを含む。また、センサ情報は、センサ位置情報、速度情報、取得時刻情報、及び取得場所情報の少なくとも一つを含んでもよい。センサ位置情報は、センサ情報を取得したセンサの位置を示す。速度情報は、センサがセンサ情報を取得した際の移動体の速度を示す。取得時刻情報は、センサ情報がセンサにより取得された時刻を示す。取得場所情報は、センサ情報がセンサにより取得された際の移動体又はセンサの位置を示す。
次に、データ送信可否判定部2013は、移動体(クライアント装置2002)がサーバ2001へセンサ情報を送信可能な環境に存在するかを判定する(S2002)。例えば、データ送信可否判定部2013は、GPS等の情報を用いて、クライアント装置2002がいる場所及び時刻を特定し、データを送信可能かどうかを判定してもよい。また、データ送信可否判定部2013は、特定のアクセスポイントに接続できるかどうかで、データを送信可能かどうかを判定してもよい。
クライアント装置2002は、移動体がサーバ2001へセンサ情報を送信可能な環境に存在すると判定した場合(S2002でYes)、センサ情報をサーバ2001に送信する(S2003)。つまり、クライアント装置2002がセンサ情報をサーバ2001に送信できるような状況になった時点で、クライアント装置2002は、保持しているセンサ情報をサーバ2001に送信する。例えば、交差点等に高速通信が可能なミリ波のアクセスポイントが設置される。クライアント装置2002は、交差点内に入った時点で、ミリ波通信を用いてクライアント装置2002が保持するセンサ情報を高速にサーバ2001に送信する。
次に、クライアント装置2002は、サーバ2001に送信済みのセンサ情報を記憶部2012から削除する(S2004)。なお、クライアント装置2002は、サーバ2001に送信していないセンサ情報が所定の条件を満たした場合に、当該センサ情報を削除してもよい。例えば、クライアント装置2002は、保持するセンサ情報の取得時刻が現在時刻から一定時刻前より古くなった時点でそのセンサ情報を記憶部2012から削除してもよい。つまり、クライアント装置2002は、センサ情報がセンサにより取得された時刻と、現在の時刻との差が、予め定められた時間を超えた場合にセンサ情報を記憶部2012から削除してもよい。また、クライアント装置2002は、保持するセンサ情報の取得場所が現在地点から一定距離より離れた時点でそのセンサ情報を記憶部2012から削除してもよい。つまり、クライアント装置2002は、センサ情報がセンサにより取得された際の移動体又はセンサの位置と、現在の移動体又はセンサの位置との差が、予め定められた距離を超えた場合にセンサ情報を記憶部2012から削除してもよい。これにより、クライアント装置2002の記憶部2012の容量を抑制することができる。
クライアント装置2002によるセンサ情報の取得が終了していない場合(S2005でNo)、クライアント装置2002は、ステップS2001以降の処理を再度行う。また、クライアント装置2002によるセンサ情報の取得が終了した場合(S2005でYes)、クライアント装置2002は処理を終了する。
また、クライアント装置2002はサーバ2001に送信するセンサ情報を通信状況に合わせて選択してもよい。例えば、クライアント装置2002は、高速通信が可能な場合は、記憶部2012に保持されるサイズが大きいセンサ情報(例えばLiDAR取得情報等)を優先して送信する。また、クライアント装置2002は、高速通信が難しい場合は、記憶部2012に保持されるサイズが小さく優先度の高いセンサ情報(例えば可視光画像)を送信する。これにより、クライアント装置2002は記憶部2012に保持したセンサ情報をネットワークの状況に応じて効率的にサーバ2001に送信できる。
また、クライアント装置2002は、上記現在時刻を示す時刻情報、及び、現在地点を示す場所情報をサーバ2001から取得してもよい。また、クライアント装置2002は、取得した時刻情報及び場所情報に基づきセンサ情報の取得時刻及び取得場所を決定してもよい。つまり、クライアント装置2002は、サーバ2001から時刻情報を取得し、取得した時刻情報を用いて取得時刻情報を生成してもよい。また、クライアント装置2002は、サーバ2001から場所情報を取得し、取得した場所情報を用いて取得場所情報を生成してもよい。
例えば時刻情報については、サーバ2001とクライアント装置2002とはNTP(Network Time Protocol)、又はPTP(Precision Time Protocol)等の仕組みを用いて時刻同期を行う。これにより、クライアント装置2002は正確な時刻情報を取得できる。また、サーバ2001と複数のクライアント装置との間で時刻を同期できるので、別々のクライアント装置2002が取得したセンサ情報内の時刻を同期できる。よって、サーバ2001は、同期された時刻を示すセンサ情報を取り扱える。なお、時刻同期の仕組みはNTP又はPTP以外のどのような方法でも構わない。また、上記時刻情報及び場所情報としてGPSの情報が用いられてもよい。
サーバ2001は、時刻又は場所を指定して複数のクライアント装置2002からセンサ情報を取得しても構わない。例えば何らかの事故が発生した場合に、その付近にいたクライアントを探すため、サーバ2001は、事故発生時刻と場所を指定して複数のクライアント装置2002にセンサ情報送信要求をブロードキャスト送信する。そして、該当する時刻と場所のセンサ情報を持つクライアント装置2002は、サーバ2001にセンサ情報を送信する。つまり、クライアント装置2002は、サーバ2001から場所及び時刻を指定する指定情報を含むセンサ情報送信要求を受信する。クライアント装置2002は、記憶部2012に、指定情報で示される場所及び時刻において得られたセンサ情報が記憶されており、かつ、移動体がサーバ2001へセンサ情報を送信可能な環境に存在すると判定した場合、指定情報で示される場所及び時刻において得られたセンサ情報をサーバ2001に送信する。これにより、サーバ2001は、事故の発生に関連するセンサ情報を複数のクライアント装置2002から取得し、事故解析等に利用できる。
なお、クライアント装置2002は、サーバ2001からのセンサ情報送信要求を受信した場合に、センサ情報の送信を拒否してもよい。また、複数のセンサ情報のうち、どのセンサ情報を送信可能かどうかを事前にクライアント装置2002が設定してもよい。または、サーバ2001は、センサ情報の送信の可否を都度クライアント装置2002に問い合わせてもよい。
また、サーバ2001にセンサ情報を送信したクライアント装置2002にはポイントが付与されてもよい。このポイントは、例えば、ガソリン購入費、EV(Electric Vehicle)の充電費、高速道路の通行料、又はレンタカー費用などの支払いに使用できる。また、サーバ2001は、センサ情報を取得した後、センサ情報の送信元のクライアント装置2002を特定するための情報を削除してもよい。例えば、この情報は、クライアント装置2002のネットワークアドレスなどの情報である。これによりセンサ情報を匿名化することができるので、クライアント装置2002のユーザは安心して、クライアント装置2002からセンサ情報をサーバ2001に送信できる。また、サーバ2001は、複数のサーバから構成されてもよい。例えば複数のサーバでセンサ情報が共有化されることで、あるサーバが故障しても他のサーバがクライアント装置2002と通信できる。これにより、サーバ故障によるサービスの停止を回避できる。
また、センサ情報送信要求で指定される指定場所は事故の発生位置などを示すものであり、センサ情報送信要求で指定される指定時刻におけるクライアント装置2002の位置とは異なることがある。よって、サーバ2001は、例えば、指定場所として周辺XXm以内などの範囲を指定することで、当該範囲内に存在するクライアント装置2002に対して情報取得を要求できる。指定時刻についても同様に、サーバ2001は、ある時刻から前後N秒以内など範囲を指定してもよい。これにより、サーバ2001は、「時刻:t-Nからt+Nにおいて、場所:絶対位置SからXXm以内」に存在していたクライアント装置2002からセンサ情報が取得できる。クライアント装置2002は、LiDARなどの三次元データを送信する際に、時刻tの直後に生成したデータを送信してもよい。
また、サーバ2001は、指定場所として、センサ情報取得対象となるクライアント装置2002の場所を示す情報と、センサ情報が欲しい場所とをそれぞれ別に指定してもよい。例えば、サーバ2001は、絶対位置SからYYmの範囲を少なくとも含むセンサ情報を、絶対位置SからXXm以内に存在したクライアント装置2002から取得することを指定する。クライアント装置2002は、送信する三次元データを選択する際には、指定された範囲のセンサ情報を少なくとも含むように、1つ以上のランダムアクセス可能な単位の三次元データを選択する。また、クライアント装置2002は、可視光画像を送信する際は、少なくとも時刻tの直前又は直後のフレームを含む、時間的に連続した複数の画像データを送信してもよい。
クライアント装置2002が5G或いはWiFi、又は、5Gにおける複数モードなど、複数の物理ネットワークをセンサ情報の送信に利用できる場合には、クライアント装置2002は、サーバ2001から通知された優先順位に従って利用するネットワークを選択してもよい。または、クライアント装置2002自身が送信データのサイズに基づいて適切な帯域を確保できるネットワークを選択してもよい。または、クライアント装置2002は、データ送信にかかる費用等に基づいて利用するネットワークを選択してもよい。また、サーバ2001からの送信要求には、クライアント装置2002が時刻Tまでに送信を開始可能な場合に送信を行う、など、送信期限を示す情報が含まれてもよい。サーバ2001は、期限内に十分なセンサ情報が取得できなければ再度送信要求を発行してもよい。
センサ情報は、圧縮又は非圧縮のセンサデータと共に、センサデータの特性を示すヘッダ情報を含んでもよい。クライアント装置2002は、ヘッダ情報を、センサデータとは異なる物理ネットワーク又は通信プロトコルを介してサーバ2001に送信してもよい。例えば、クライアント装置2002は、センサデータの送信に先立ってヘッダ情報をサーバ2001に送信する。サーバ2001は、ヘッダ情報の解析結果に基づいてクライアント装置2002のセンサデータを取得するかどうかを判断する。例えば、ヘッダ情報は、LiDARの点群取得密度、仰角、或いはフレームレート、又は、可視光画像の解像度、SN比、或いはフレームレートなどを示す情報を含んでもよい。これにより、サーバ2001は、決定した品質のセンサデータを有するクライアント装置2002からセンサ情報を取得できる。
以上のように、クライアント装置2002は、移動体に搭載され、移動体に搭載されたセンサにより得られた、移動体の周辺状況を示すセンサ情報を取得し、センサ情報を記憶部2012に記憶する。クライアント装置2002は、移動体がサーバ2001へセンサ情報を送信可能な環境に存在するかを判定し、移動体がサーバへセンサ情報を送信可能な環境に存在すると判定した場合、センサ情報をサーバ2001に送信する。
また、クライアント装置2002は、さらに、センサ情報から、移動体の周辺の三次元データを作成し、作成された三次元データを用いて移動体の自己位置を推定する。
また、クライアント装置2002は、さらに、サーバ2001に三次元マップの送信要求を送信し、サーバ2001から三次元マップを受信する。クライアント装置2002は、自己位置の推定では、三次元データと三次元マップとを用いて、自己位置を推定する。
なお、上記クライアント装置2002による処理は、クライアント装置2002における情報送信方法として実現されてもよい。
また、クライアント装置2002は、プロセッサと、メモリとを備え、プロセッサは、メモリを用いて、上記の処理を行ってもよい。
次に、本実施の形態に係るセンサ情報収集システムについて説明する。図21は、本実施の形態に係るセンサ情報収集システムの構成を示す図である。図21に示すように本実施の形態に係るセンサ情報収集システムは、端末2021Aと、端末2021Bと、通信装置2022Aと、通信装置2022Bと、ネットワーク2023と、データ収集サーバ2024と、地図サーバ2025と、クライアント装置2026とを含む。なお、端末2021A及び端末2021Bを特に区別しない場合には端末2021とも記載する。通信装置2022A及び通信装置2022Bを特に区別しない場合には通信装置2022とも記載する。
データ収集サーバ2024は、端末2021が備えるセンサで得られたセンサデータなどのデータを三次元空間中の位置と対応付けられた位置関連データとして収集する。
センサデータとは、例えば、端末2021の周囲の状態または端末2021の内部の状態などを、端末2021が備えるセンサを用いて取得したデータである。端末2021は、端末2021と直接通信可能、又は同一の通信方式で一或いは複数の中継装置を中継して通信可能な位置にある一又は複数のセンサ機器から収集したセンサデータをデータ収集サーバ2024に送信する。
位置関連データに含まれるデータは、例えば、端末自身又は端末が備える機器の動作状態、動作ログ、サービスの利用状況などを示す情報を含んでいてもよい。また、位置関連データに含まれるデータは、端末2021の識別子と端末2021の位置又は移動経路などとを対応付けた情報などを含んでもよい。
位置関連データに含まれる、位置を示す情報は、例えば三次元地図データなどの三次元データにおける位置を示す情報と対応付けられている。位置を示す情報の詳細については後述する。
位置関連データは、位置を示す情報である位置情報に加えて、前述した時刻情報と、位置関連データに含まれるデータの属性、又は当該データを生成したセンサの種類(例えば型番など)を示す情報とのうち少なくとも一つを含んでいてもよい。位置情報及び時刻情報は、位置関連データのヘッダ領域又は位置関連データを格納するフレームのヘッダ領域に格納されていてもよい。また、位置情報及び時刻情報は、位置関連データと対応付けられたメタデータとして位置関連データとは別に送信及び/又は格納されてもよい。
地図サーバ2025は、例えば、ネットワーク2023に接続されており、端末2021などの他の装置からの要求に応じて三次元地図データなどの三次元データを送信する。また、前述した各実施の形態で説明したように、地図サーバ2025は、端末2021から送信されたセンサ情報を用いて、三次元データを更新する機能などを備えていてもよい。
データ収集サーバ2024は、例えば、ネットワーク2023に接続されており、端末2021などの他の装置から位置関連データを収集し、収集した位置関連データを内部又は他のサーバ内の記憶装置に格納する。また、データ収集サーバ2024は、収集した位置関連データ又は位置関連データに基づいて生成した三次元地図データのメタデータなどを、端末2021からの要求に応じて端末2021に対して送信する。
ネットワーク2023は、例えばインターネットなどの通信ネットワークである。端末2021は、通信装置2022を介してネットワーク2023に接続されている。通信装置2022は、一つの通信方式、又は複数の通信方式を切り替えながら端末2021と通信を行う。通信装置2022は、例えば、(1)LTE(Long Term Evolution)などの基地局、(2)WiFi或いはミリ波通信などのアクセスポイント(AP)、(3)SIGFOX、LoRaWAN或いはWi-SUNなどのLPWA(Low Power Wide Area) Networkのゲートウェイ、又は、(4)DVB-S2などの衛星通信方式を用いて通信を行う通信衛星である。
なお、基地局は、NB-IoT(Narrow Band-IoT)又はLTE-MなどのLPWAに分類される方式で端末2021との通信を行っていてもよいし、これらの方式を切り替えながら端末2021との通信を行っていてもよい。
ここでは、端末2021が2種類の通信方式を用いる通信装置2022と通信する機能を備え、これらの通信方式のいずれかを用いて、またはこれらの複数の通信方式及び直接の通信相手となる通信装置2022を切り替えながら地図サーバ2025又はデータ収集サーバ2024と通信を行う場合を例に挙げるが、センサ情報収集システム及び端末2021の構成はこれに限らない。例えば、端末2021は、複数の通信方式での通信機能を有さず、いずれか一つの通信方式で通信を行う機能を備えてもよい。また、端末2021は、3つ以上の通信方式に対応していてもよい。また、端末2021ごとに対応する通信方式が異なっていてもよい。
端末2021は、例えば図11に示したクライアント装置902の構成を備える。端末2021は、受信した三次元データを用いて自己位置などの位置推定を行う。また、端末2021は、センサから取得したセンサデータと位置推定の処理により得られた位置情報とを対応付けて位置関連データを生成する。
位置関連データに付加される位置情報は、例えば、三次元データで用いられている座標系における位置を示す。例えば、位置情報は、緯度及び経度の値で表される座標値である。このとき、端末2021は、座標値と共に当該座標値の基準となる座標系、及び位置推定に用いた三次元データを示す情報を位置情報に含めてもよい。また、座標値は高度の情報を含んでいてもよい。
また、位置情報は、前述した三次元データの符号化に用いることができるデータの単位又は空間の単位に対応付けられていてもよい。この単位とは、例えば、WLD、GOS、SPC、VLM、又はVXLなどである。このとき、位置情報は、例えば位置関連データに対応するSPCなどのデータ単位を特定するための識別子で表現される。なお、位置情報は、SPCなどのデータ単位を特定するための識別子に加えて、当該SPCなどのデータ単位を含む三次元空間を符号化した三次元データを示す情報、又は当該SPC内での詳細な位置を示す情報などを含んでいてもよい。三次元データを示す情報とは、例えば、当該三次元データのファイル名である。
このように、当該システムは、三次元データを用いた位置推定に基づく位置情報と対応付けた位置関連データを生成することにより、GPSを用いて取得されたクライアント装置(端末2021)の自己位置に基づく位置情報をセンサ情報に付加する場合よりも精度の高い位置情報をセンサ情報に付与することができる。その結果、位置関連データを他の装置が他のサービスにおいて利用する場合においても、同じ三次元データに基づいて位置推定を行うことで、位置関連データに対応する位置を実空間でより正確に特定できる可能性がある。
なお、本実施の形態では、端末2021から送信されるデータが位置関連データの場合を例に挙げて説明したが、端末2021から送信されるデータは位置情報と関連付けられていないデータであってもよい。すなわち、他の実施の形態で説明した三次元データ又はセンサデータの送受信が本実施の形態で説明したネットワーク2023を介して行われてもよい。
次に、三次元又は二次元の実空間又は地図空間における位置を示す位置情報の異なる例について説明する。位置関連データに付加される位置情報は、三次元データ中の特徴点に対する相対位置を示す情報であってもよい。ここで、位置情報の基準となる特徴点は、例えばSWLDとして符号化され、三次元データとして端末2021に通知された特徴点である。
特徴点に対する相対位置を示す情報は、例えば、特徴点から位置情報が示す点までのベクトルで表され、特徴点から位置情報が示す点までの方向と距離を示す情報であってもよい。または、特徴点に対する相対位置を示す情報は、特徴点から位置情報が示す点までのX軸、Y軸、Z軸のそれぞれの変位量を示す情報であってもよい。また、特徴点に対する相対位置を示す情報は、3以上の特徴点のそれぞれから位置情報が示す点までの距離を示す情報であってもよい。なお、相対位置は、各特徴点を基準として表現された位置情報が示す点の相対位置ではなく、位置情報が示す点を基準として表現された各特徴点の相対位置であってもよい。特徴点に対する相対位置に基づく位置情報の一例は、基準となる特徴点を特定するための情報と、当該特徴点に対する位置情報が示す点の相対位置を示す情報とを含む。また、特徴点に対する相対位置を示す情報が三次元データとは別に提供される場合、特徴点に対する相対位置を示す情報は、相対位置の導出に用いた座標軸、三次元データの種類を示す情報、又は/及び相対位置を示す情報の値の単位量あたりの大きさ(縮尺など)を示す情報などを含んでいてもよい。
また、位置情報は、複数の特徴点について、各特徴点に対する相対位置を示す情報を含んでいてもよい。位置情報を複数の特徴点に対する相対位置で表した場合、実空間において当該位置情報が示す位置を特定しようとする端末2021は、特徴点ごとにセンサデータから推定した当該特徴点の位置から位置情報が示す位置の候補点を算出し、算出された複数の候補点を平均して求めた点を位置情報が示す点であると判定してもよい。この構成によると、センサデータから特徴点の位置を推定する際の誤差の影響を軽減できるため、実空間における位置情報が示す点の推定精度を向上できる。また、位置情報が複数の特徴点に対する相対位置を示す情報を含む場合、端末2021が備えるセンサの種類又は性能などの制約で検出できない特徴点がある場合であっても、複数の特徴点のいずれか一つでも検出することができれば位置情報が示す点の値を推定することが可能となる。
特徴点として、センサデータから特定可能な点を用いことができる。センサデータから特定可能な点とは、例えば、前述した三次元特徴量又は可視光データの特徴量が閾値以上であるなど特徴点検出用の所定の条件を満たす点又は領域内の点である。
また、実空間に設置されたマーカなどを特徴点として用いてもよい。この場合、マーカは、LiDER又はカメラなどのセンサを用いて取得されたデータから検出及び位置の特定が可能であればよい。例えば、マーカは、色或いは輝度値(反射率)の変化、又は、三次元形状(凹凸など)で表現される。また、当該マーカの位置を示す座標値、又は当該マーカの識別子から生成された二次元コード又はバーコードなどが用いられてもよい。
また、光信号を送信する光源をマーカとして用いてもよい。光信号の光源をマーカとして用いる場合、座標値又は識別子などの位置を取得するための情報だけでなく、その他のデータが光信号により送信されてもよい。例えば、光信号は、当該マーカの位置に応じたサービスのコンテンツ、コンテンツを取得するためのurlなどのアドレス、又はサービスの提供を受けるための無線通信装置の識別子と、当該無線通信装置と接続するための無線通信方式などを示す情報を含んでもよい。光通信装置(光源)をマーカとして用いることで、位置を示す情報以外のデータの送信が容易になると共に、当該データを動的に切り替えることが可能となる。
端末2021は、互いに異なるデータ間での特徴点の対応関係を、例えば、データ間で共通に用いられる識別子、又は、データ間の特徴点の対応関係を示す情報或いはテーブルを用いて把握する。また、特徴点間の対応関係を示す情報がない場合、端末2021は、一方の三次元データにおける特徴点の座標を他方の三次元データ空間上の位置に変換した場合に最も近い距離にある特徴点を対応する特徴点であると判定してもよい。
以上で説明した相対位置に基づく位置情報を用いた場合、互いに異なる三次元データを用いる端末2021又はサービス間であっても、各三次元データに含まれる、又は各三次元データと対応付けられた共通の特徴点を基準に位置情報が示す位置を特定、又は推定することができる。その結果、互いに異なる三次元データを用いる端末2021又はサービス間で、同じ位置をより高い精度で特定又は推定することが可能となる。
また、互いに異なる座標系を用いて表現された地図データ又は三次元データを用いる場合であっても、座標系の変換に伴う誤差の影響を低減できるため、より高精度な位置情報に基づくサービスの連携が可能となる。
以下、データ収集サーバ2024が提供する機能の例について説明する。データ収集サーバ2024は、受信した位置関連データを他のデータサーバに転送してもよい。データサーバが複数ある場合、データ収集サーバ2024は、受信した位置関連データをどのデータサーバに転送するかを判定して、転送先として判定されたデータサーバ宛に位置関連データを転送する。
データ収集サーバ2024は、転送先の判定を、例えば、データ収集サーバ2024に事前に設定された転送先サーバの判定ルールに基づいて行う。転送先サーバの判定ルールとは、例えば、各端末2021に対応付けられた識別子と転送先のデータサーバとを対応付けた転送先テーブルなどで設定される。
端末2021は、送信する位置関連データに対して当該端末2021に対応付けられた識別子を付加してデータ収集サーバ2024に送信する。データ収集サーバ2024は、位置関連データに付加された識別子に対応する転送先のデータサーバを転送先テーブルなどを用いた転送先サーバの判定ルールに基づいて特定し、当該位置関連データを特定されたデータサーバに送信する。また、転送先サーバの判定ルールは、位置関連データが取得された時間又は場所などを用いた判定条件で指定されてもよい。ここで、上述した送信元の端末2021に対応付けられた識別子とは、例えば各端末2021に固有の識別子、又は端末2021が属するグループを示す識別子などである。
また、転送先テーブルは、送信元の端末に対応付けられた識別子と転送先のデータサーバとを直接対応付けたものでなくてもよい。例えば、データ収集サーバ2024は、端末2021に固有の識別子毎に付与されたタグ情報を格納した管理テーブルと、当該タグ情報と転送先のデータサーバを対応付けた転送先テーブルとを保持する。データ収集サーバ2024は、管理テーブルと転送先テーブルとを用いてタグ情報に基づく転送先のデータサーバを判定してもよい。ここで、タグ情報は、例えば当該識別子に対応する端末2021の種類、型番、所有者、所属するグループ又はその他の識別子に付与された管理用の制御情報又はサービス提供用の制御情報である。また、転送先テーブルに、送信元の端末2021に対応付けられた識別子の代わりに、センサ毎に固有の識別子が用いられてもよい。また、転送先サーバの判定ルールは、クライアント装置2026から設定できてもよい。
データ収集サーバ2024は、複数のデータサーバを転送先として判定し、受信した位置関連データを当該複数のデータサーバに転送してもよい。この構成によると、例えば、位置関連データを自動的にバックアップする場合、又は位置関連データを異なるサービスで共通に利用するために、各サービスを提供するためのデータサーバに対して位置関連データを送信する必要がある場合に、データ収集サーバ2024に対する設定を変更ことで意図通りのデータの転送を実現できる。その結果、個別の端末2021に位置関連データの送信先を設定する場合と比較して、システムの構築及び変更に要する工数を削減することができる。
データ収集サーバ2024は、データサーバから受信した転送要求信号に応じて、転送要求信号で指定されたデータサーバを新たな転送先として登録し、以降に受信した位置関連データを当該データサーバに転送してもよい。
データ収集サーバ2024は、端末2021から受信した位置関連データを記録装置に保存し、端末2021又はデータサーバから受信した送信要求信号に応じて、送信要求信号で指定された位置関連データを、要求元の端末2021又はデータサーバに送信してもよい。
データ収集サーバ2024は、要求元のデータサーバ又は端末2021に対する位置関連データの提供の可否を判断し、提供可能と判断された場合に要求元のデータサーバ又は端末2021に位置関連データの転送又は送信を行ってもよい。
クライアント装置2026から現在の位置関連データの要求を受け付けた場合、端末2021による位置関連データの送信タイミングでなくても、データ収集サーバ2024が端末2021に対して位置関連データの送信要求を行い、端末2021が当該送信要求に応じて位置関連データを送信してもよい。
上記の説明では、端末2021がデータ収集サーバ2024に対して位置情報データを送信するとしたが、データ収集サーバ2024は、例えば、端末2021を管理する機能など、端末2021から位置関連データを収集するために必要な機能又は端末2021から位置関連データを収集する際に用いられる機能などを備えてもよい。
データ収集サーバ2024は、端末2021に対して位置情報データの送信を要求するデータ要求信号を送信し、位置関連データを収集する機能を備えてもよい。
データ収集サーバ2024には、データ収集の対象となる端末2021と通信を行うためのアドレス又は端末2021固有の識別子などの管理情報が事前に登録されている。データ収集サーバ2024は、登録されている管理情報に基づいて端末2021から位置関連データを収集する。管理情報は、端末2021が備えるセンサの種類、端末2021が備えるセンサの数、及び端末2021が対応する通信方式などの情報を含んでいてもよい。
データ収集サーバ2024は、端末2021の稼働状態又は現在位置などの情報を端末2021から収集してもよい。
管理情報の登録は、クライアント装置2026から行われてもよいし、端末2021が登録要求をデータ収集サーバ2024に送信することで、登録のための処理が開始されてもよい。データ収集サーバ2024は、端末2021との間の通信を制御する機能を備えてもよい。
データ収集サーバ2024と端末2021とを結ぶ通信は、MNO(Mobile Network Operator)、或いはMVNO(Mobile Virtual Network Operator)などのサービス事業者が提供する専用回線、又は、VPN(Virtual Private Network)で構成された仮想の専用回線などであってもよい。この構成によると、端末2021とデータ収集サーバ2024との間の通信を安全に行うことができる。
データ収集サーバ2024は、端末2021を認証する機能、又は端末2021との間で送受信されるデータを暗号化する機能を備えてもよい。ここで、端末2021の認証の処理又はデータの暗号化の処理は、データ収集サーバ2024と端末2021との間で事前に共有された、端末2021に固有の識別子又は複数の端末2021を含む端末グループに固有の識別子などを用いて行われる。この識別子とは、例えば、SIM(Subscriber Identity Module)カードに格納された固有の番号であるIMSI(International Mobile Subscriber Identity)などである。認証処理に用いられる識別子とデータの暗号化処理に用いる識別子とは、同じであってもよいし、異なっていてもよい。
データ収集サーバ2024と端末2021との間の認証又はデータの暗号化の処理は、データ収集サーバ2024と端末2021との両方が当該処理を実施する機能を備えていれば提供可能であり、中継を行う通信装置2022が用いる通信方式に依存しない。よって、端末2021が通信方式を用いるかを考慮することなく、共通の認証又は暗号化の処理を用いることができるので、ユーザのシステム構築の利便性が向上する。ただし、中継を行う通信装置2022が用いる通信方式に依存しないとは、通信方式に応じて変更することが必須ではないことを意味している。つまり、伝送効率の向上又は安全性の確保の目的で、中継装置が用いる通信方式に応じてデータ収集サーバ2024と端末2021との間の認証又はデータの暗号化の処理が切り替えられてもよい。
データ収集サーバ2024は、端末2021から収集する位置関連データの種類及びデータ収集のスケジュールなどのデータ収集ルールを管理するUIをクライアント装置2026に提供してもよい。これにより、ユーザはクライアント装置2026を用いてデータを収集する端末2021、並びに、データの収集時間及び頻度などを指定できる。また、データ収集サーバ2024は、データを収集したい地図上の領域などを指定し、当該領域に含まれる端末2021から位置関連データを収集してもよい。
データ収集ルールを端末2021単位で管理する場合、クライアント装置2026は、例えば、管理対象となる端末2021又はセンサのリストを画面に提示する。ユーザはリストの項目毎にデータの収集の要否又は収集スケジュールなどを設定する。
データを収集したい地図上の領域などを指定する場合、クライアント装置2026は、例えば、管理対象となる地域の二次元又は三次元の地図を画面に提示する。ユーザは、表示された地図上でデータを収集する領域を選択する。地図上で選択される領域は、地図上で指定された点を中心とする円形又は矩形の領域であってもよいし、ドラッグ動作で特定可能な円形又は矩形の領域であってもよい。また、クライアント装置2026は、都市、都市内のエリア、ブロック、又は主要な道路など予め設定された単位で領域を選択してもよい。また、地図を用いて領域を指定するのではなく、緯度及び経度の数値を入力して領域が設定されてもよいし、入力されたテキスト情報に基づいて導出した候補領域のリストから領域が選択されてもよい。テキスト情報は、例えば、地域、都市、又はランドマークの名前などである。
また、ユーザが一又は複数の端末2021を指定して、当該端末2021の周囲100メートルの範囲内などの条件を設定することで、指定領域を動的に変更しながらデータの収集が行われてもよい。
また、クライアント装置2026がカメラなどのセンサを備える場合、センサデータから得られたクライアント装置2026の実空間での位置に基づいて地図上の領域が指定されてもよい。例えば、クライアント装置2026は、センサデータを用いて自己位置を推定し、推定された位置に対応する地図上の点から予め定められた距離、又はユーザが指定した距離の範囲内の領域を、データを収集する領域として指定してもよい。また、クライアント装置2026は、センサのセンシング領域、すなわち取得されたセンサデータに対応する領域を、データを収集する領域として指定してもよい。または、クライアント装置2026は、ユーザの指定したセンサデータに対応する位置に基づく領域を、データを収集する領域として指定してもよい。センサデータに対応する地図上の領域、又は位置の推定は、クライアント装置2026が行ってもよいし、データ収集サーバ2024が行ってもよい。
地図上の領域で指定を行う場合、データ収集サーバ2024は、各端末2021の現在位置情報を収集することで、指定された領域内の端末2021を特定し、特定された端末2021に対して位置関連データの送信を要求してもよい。また、データ収集サーバ2024が領域内の端末2021を特定するのではなく、データ収集サーバ2024が指定された領域を示す情報を端末2021に送信し、端末2021が自身が指定された領域内にあるか否かを判定して、指定された領域内にあると判断された場合に位置関連データを送信してもよい。
データ収集サーバ2024は、クライアント装置2026が実行するアプリケーションにおいて上述したUI(User Interface)を提供するためのリスト又は地図などのデータをクライアント装置2026に送信する。データ収集サーバ2024は、リスト又は地図などのデータだけでなく、アプリケーションのプログラムをクライアント装置2026に送信してもよい。また、上述したUIは、ブラウザで表示可能なHTMLなどで作成されたコンテンツとして提供されてもよい。なお、地図データなど一部のデータは地図サーバ2025などのデータ収集サーバ2024以外のサーバから提供されてもよい。
クライアント装置2026は、ユーザによる設定ボタンの押下など、入力が完了したことを通知する入力が行われると、入力された情報を設定情報としてデータ収集サーバ2024に送信する。データ収集サーバ2024は、クライアント装置2026から受信した設定情報に基づいて各端末2021に対して、位置関連データの要求又は位置関連データの収集ルールを通知する信号を送信し、位置関連データの収集を行う。
次に、三次元又は二次元の地図データに付加された付加情報に基づいて端末2021の動作を制御する例について説明する。
本構成では、道路又は駐車場に埋設された無線給電の給電アンテナ又は給電コイルなどの給電部の位置を示すオブジェクト情報が、三次元データに含まれて、又は三次元データに対応付けられて、車又はドローンなどである端末2021に提供される。
充電を行うために当該オブジェクト情報を取得した車両又はドローンは、車両が備える充電アンテナ又は充電コイルなどの充電部の位置が、当該オブジェクト情報が示す領域と対向する位置になるよう自動運転で車両自身の位置を移動させ、充電を開始する。なお、自動運転機能を備えていない車両又はドローンの場合は、画面上に表示された画像又は音声などを利用して、移動すべき方向又は行うべき操作を運転手又は操縦者に対して提示される。そして、推定された自己位置に基づいて算出した充電部の位置が、オブジェクト情報で示された領域又は当該領域から所定の距離の範囲内に入った判断されると、運転又は操縦を中止させる内容へと提示する画像又は音声が切り替えられ、充電が開始される。
また、オブジェクト情報は給電部の位置を示す情報ではなく、当該領域内に充電部を配置すると所定の閾値以上の充電効率が得られる領域を示す情報であってもよい。オブジェクト情報の位置は、オブジェクト情報が示す領域の中心の点で表されてもよいし、二次元平面内の領域或いは線、又は、三次元空間内の領域、線或いは平面などで表されてもよい。
この構成によると、LiDERのセンシングデータ又はカメラで撮影した映像では把握できない給電アンテナの位置を把握することができるので、車などの端末2021が備える無線充電用のアンテナと道路などに埋設された無線給電アンテナとの位置合わせをより高精度に行うことができる。その結果、無線充電時の充電速度を短くしたり、充電効率を向上させることができる。
オブジェクト情報は、給電アンテナの以外の対象物であってもよい。例えば、三次元データは、ミリ波無線通信のAPの位置などをオブジェクト情報として含む。これにより、端末2021は、APの位置を事前に把握することができるので、当該オブジェクト情報の方向にビームの指向性を向けて通信を開始することができる。その結果、伝送速度の向上、通信開始までの時間の短縮、及び通信可能な期間を延ばすなどの通信品質の向上を実現できる。
オブジェクト情報は、当該オブジェクト情報に対応する対象物のタイプを示す情報を含んでもよい。また、オブジェクト情報は、当該オブジェクト情報の三次元データ上の位置に対応する実空間上の領域内、又は領域から所定の距離の範囲内に端末2021が含まれる場合に、端末2021が実施すべき処理を示す情報を含んでもよい。
オブジェクト情報は、三次元データを提供するサーバとは異なるサーバから提供されてもよい。オブジェクト情報を三次元データとは別に提供する場合、同一のサービスで使用されるオブジェクト情報が格納されたオブジェクトグループが、対象サービス又は対象機器の種類に応じてそれぞれ別のデータとして提供されてもよい。
オブジェクト情報と組み合わせて用いられる三次元データは、WLDの点群データであってもよいし、SWLDの特徴点データであってもよい。
(実施の形態6)
以下、8分木表現とボクセルのスキャン順について説明する。ボリュームは8分木構造に変換(8分木化)された後、符号化される。8分木構造はノードとリーフとで構成される。各ノードは8つのノード又はリーフを持ち、各リーフはボクセル(VXL)情報を持つ。図22は、複数のボクセルを含むボリュームの構造例を示す図である。図23は、図22に示すボリュームを8分木構造に変換した例を示す図である。ここで、図23に示すリーフのうち、リーフ1、2、3はそれぞれ図22に示すボクセルVXL1、VXL2、VXL3を表し、点群を含むVXL(以下、有効VXL)を表現している。
8分木は、例えば0、1の二値列で表現される。例えば、ノード又は有効VXLを値1、それ以外を値0とすると、各ノード及びリーフには図23に示す二値列が割当てられる。そして、幅優先又は深さ優先のスキャン順に応じて、この二値列がスキャンされる。例えば幅優先でスキャンされた場合、図24のAに示す二値列が得られる。深さ優先でスキャンした場合は図24のBに示す二値列が得られる。このスキャンにより得られた二値列はエントロピー符号化によって符号化され情報量が削減される。
次に、8分木表現における深度情報について説明する。8分木表現における深度は、ボリューム内に含まれるポイントクラウド情報を、どの粒度まで保持するかをコントロールするために使用される。深度を大きく設定すると、より細かいレベルまでポイントクラウド情報を再現することができるが、ノード及びリーフを表現するためのデータ量が増える。逆に深度を小さく設定すると、データ量が減少するが、複数の異なる位置及び色の異なるポイントクラウド情報が同一位置かつ同一色であるとみなされるため、本来のポイントクラウド情報が持つ情報を失うことになる。
例えば、図25は、図23に示す深度=2の8分木を、深度=1の8分木で表現した例を示す図である。図25に示す8分木は図23に示す8分木よりデータ量が少なくなる。つまり、図25に示す8分木は図25に示す8分木より二値列化後のビット数が少ない。ここで、図23に示すリーフ1とリーフ2が図24に示すリーフ1で表現されることになる。つまり、図23に示すリーフ1とリーフ2とが異なる位置であったという情報が失われる。
図26は、図25に示す8分木に対応するボリュームを示す図である。図22に示すVXL1とVXL2が図26に示すVXL12に対応する。この場合、三次元データ符号化装置は、図26に示すVXL12の色情報を、図22に示すVXL1とVXL2との色情報から生成する。例えば、三次元データ符号化装置は、VXL1とVXL2との色情報の平均値、中間値、又は重み平均値などをVXL12の色情報として算出する。このように、三次元データ符号化装置は、8分木の深度を変えることで、データ量の削減を制御してもよい。
三次元データ符号化装置は、8分木の深度情報を、ワールド単位、スペース単位、及びボリューム単位のいずれの単位で設定しても構わない。またその際、三次元データ符号化装置は、ワールドのヘッダ情報、スペースのヘッダ情報、又はボリュームのヘッダ情報に深度情報を付加してもよい。また、時間の異なる全てのワールド、スペース、及びボリュームで深度情報して同一の値を使用してもよい。この場合、三次元データ符号化装置は、全時間のワールドを管理するヘッダ情報に深度情報を付加してもよい。
(実施の形態7)
三次元点群の情報は、位置情報(geometry)と属性情報(attribute)とを含む。位置情報は、ある点を基準とした座標(x座標、y座標、z座標)を含む。位置情報を符号化する場合は、各三次元点の座標を直接符号化する代わりに、各三次元点の位置を8分木表現で表現し、8分木の情報を符号化することで符号量を削減する方法が用いられる。
一方、属性情報は、各三次元点の色情報(RGB、YUVなど)、反射率、及び法線ベクトルなどを示す情報を含む。例えば、三次元データ符号化装置は、属性情報を、位置情報とは別の符号化方法を用いて符号化することができる。
本実施の形態では属性情報の符号化方法について説明する。なお、本実施の形態では属性情報の値として整数値を用いて説明する。例えば色情報RGB又はYUVの各色成分が8bit精度である場合、各色成分は0~255の整数値をとる。反射率の値が10bit精度である場合、反射率の値は0~1023の整数値をとる。なお、三次元データ符号化装置は、属性情報のビット精度が小数精度である場合、属性情報の値が整数値になるように、当該値にスケール値を乗じてから整数値に丸めてもよい。なお、三次元データ符号化装置は、このスケール値をビットストリームのヘッダ等に付加してもよい。
三次元点の属性情報の符号化方法として、三次元点の属性情報の予測値を算出し、元の属性情報の値と予測値との差分(予測残差)を符号化することが考えられる。例えば、三次元点pの属性情報の値がApであり、予測値がPpである場合、三次元データ符号化装置は、その差分絶対値Diffp=|Ap-Pp|を符号化する。この場合、予測値Ppを高精度に生成することができれば、差分絶対値Diffpの値が小さくなる。よって、例えば、値が小さい程発生ビット数が小さくなる符号化テーブルを用いて差分絶対値Diffpをエントロピー符号化することで符号量を削減することができる。
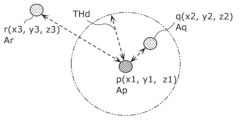
属性情報の予測値を生成する方法として、符号化対象の対象三次元点の周囲にある別の三次元点である参照三次元点の属性情報を用いることが考えられる。ここで参照三次元点とは、対象三次元点から予め定められた距離範囲内にある三次元点である。例えば、対象三次元点p=(x1,y1,z1)と三次元点q=(x2,y2,z2)とが存在する場合、三次元データ符号化装置は、(式A1)に示す三次元点pと三次元点qとのユークリッド距離d(p、q)を算出する。
三次元データ符号化装置は、ユークリッド距離d(p、q)が予め定められた閾値THdより小さい場合、三次元点qの位置が対象三次元点pの位置に近いと判定し、対象三次元点pの属性情報の予測値の生成に三次元点qの属性情報の値を利用すると判定する。なお、距離算出方法は別の方法でもよく、例えばマハラノビス距離等が用いられてもよい。また、三次元データ符号化装置は、対象三次元点から予め定められた距離範囲外の三次元点を予測処理に用いないと判定してもよい。例えば、三次元点rが存在し、対象三次元pと三次元点rとの距離d(p、r)が閾値THd以上である場合、三次元データ符号化装置は、三次元点rを予測に用いないと判定してもよい。なお、三次元データ符号化装置は、閾値THdを示す情報を、ビットストリームのヘッダ等に付加してもよい。
図27は、三次元点の例を示す図である。この例では、対象三次元点pと三次元点qとの距離d(p、q)が閾値THdより小さい。よって、三次元データ符号化装置は、三次元点qを対象三次元点pの参照三次元点と判定し、対象三次元pの属性情報Apの予測値Ppの生成に三次元点qの属性情報Aqの値を利用すると判定する。
一方、対象三次元点pと三次元点rとの距離d(p、r)は、閾値THd以上である。よって、三次元データ符号化装置は、三次元点rを対象三次元点pの参照三次元点でないと判定し、対象三次元点pの属性情報Apの予測値Ppの生成に三次元点rの属性情報Arの値を利用しないと判定する。
また、三次元データ符号化装置は、対象三次元点の属性情報を予測値を用いて符号化する場合、既に属性情報を符号化及び復号済みの三次元点を参照三次元点として利用する。同様に、三次元データ復号装置は、復号対象の対象三次元点の属性情報を予測値を用いて復号する場合、既に属性情報を復号済みの三次元点を参照三次元点として利用する。これにより、符号化時と復号時とで同一の予測値を生成することができるので、符号化で生成した三次元点のビットストリームを復号側で正しく復号することができる。
また、三次元点の属性情報を符号化する場合に、三次元点の位置情報を用いて各三次元点を複数階層に分類してから符号化することが考えられる。ここで、分類した各階層をLoD(Level of Detail)と呼ぶ。LoDの生成方法について図28を用いて説明する。
まず、三次元データ符号化装置は、初期点a0を選択し、LoD0に割当てる。次に、三次元データ符号化装置は、点a0からの距離がLoD0の閾値Thres_LoD[0]より大きい点a1を抽出しLoD0に割当てる。次に、三次元データ符号化装置は、点a1からの距離がLoD0の閾値Thres_LoD[0]より大きい点a2を抽出しLoD0に割当てる。このように、三次元データ符号化装置は、LoD0内の各点の間の距離が閾値Thres_LoD[0]より大きくなるようにLoD0を構成する。
次に、三次元データ符号化装置は、まだLoDが未割当ての点b0を選択し、LoD1に割当てる。次に、三次元データ符号化装置は、点b0からの距離がLoD1の閾値Thres_LoD[1]より大きく、LoDが未割当ての点b1を抽出しLoD1に割当てる。次に、三次元データ符号化装置は、点b1からの距離がLoD1の閾値Thres_LoD[1]より大きく、LoDが未割当ての点b2を抽出しLoD1に割当てる。このように、三次元データ符号化装置は、LoD1内の各点の間の距離が閾値Thres_LoD[1]より大きくなるようにLoD1を構成する。
次に、三次元データ符号化装置は、まだLoDが未割当ての点c0を選択し、LoD2に割当てる。次に、三次元データ符号化装置は、点c0からの距離がLoD2の閾値Thres_LoD[2]より大きく、LoDが未割当ての点c1を抽出しLoD2に割当てる。次に、三次元データ符号化装置は、点c1からの距離がLoD2の閾値Thres_LoD[2]より大きく、LoDが未割当ての点c2を抽出しLoD2に割当てる。このように、三次元データ符号化装置は、LoD2内の各点の間の距離が閾値Thres_LoD[2]より大きくなるようにLoD2を構成する。例えば、図29に示すように、各LoDの閾値Thres_LoD[0]、Thres_LoD[1]、及びThres_LoD[2]が設定される。
また、三次元データ符号化装置は、各LoDの閾値を示す情報を、ビットストリームのヘッダ等に付加してもよい。例えば、図29に示す例の場合、三次元データ符号化装置は、閾値Thres_LoD[0]、Thres_LoD[1]、及びThres_LoD[2]をヘッダに付加してもよい。
また、三次元データ符号化装置は、LoDの最下層にLoDが未割当ての三次元点全てを割当ててもよい。この場合、三次元データ符号化装置は、LoDの最下層の閾値をヘッダに付加しないことでヘッダの符号量を削減できる。例えば、図29に示す例の場合、三次元データ符号化装置は、閾値Thres_LoD[0]とThres_LoD[1]をヘッダに付加し、Thres_LoD[2]をヘッダに付加しない。この場合、三次元データ復号装置は、Thres_LoD[2]の値0と推定してもよい。また、三次元データ符号化装置は、LoDの階層数をヘッダに付加してもよい。これにより、三次元データ復号装置は、LoDの階層数を用いて最下層のLoDを判定できる。
また、LoDの各層の閾値の値を図29に示すように上位層ほど大きく設定することで、上位層(LoD0に近い層)ほど三次元点間の距離が離れた疎点群(sparse)となり、下位層ほど三次元点間の距離が近い密点群(dense)となる。なお、図29に示す例では、LoD0が最上位層である。
また、各LoDを設定する際の初期三次元点の選択方法は、位置情報符号化時の符号化順に依存してもよい。例えば、三次元データ符号化装置は、LoD0の初期点a0として、位置情報符号化時に最初に符号化された三次元点を選択し、初期点a0を基点に、点a1、点a2を選択してLoD0を構成する。そして、三次元データ符号化装置は、LoD1の初期点b0として、LoD0に属していない三次元点の中で、最も早く位置情報が符号化された三次元点を選択してもよい。つまり、三次元データ符号化装置は、LoDnの初期点n0として、LoDnの上層(LoD0~LoDn-1)に属していない三次元点の中で、最も早く位置情報が符号化された三次元点を選択してもよい。これにより、三次元データ復号装置は、復号時に同様の初期点選択方法を用いることで、符号化時と同一のLoDを構成できるので、ビットストリームを適切に復号できる。具体的には、三次元データ復号装置は、LoDnの初期点n0として、LoDnの上層に属していない三次元点の中で、最も早く位置情報が復号された三次元点を選択する。
以下、三次元点の属性情報の予測値を、LoDの情報を用いて生成する手法について説明する。例えば、三次元データ符号化装置は、LoD0に含まれる三次元点から順に符号化する場合、LoD1に含まれる対象三次元点を、LoD0及びLoD1に含まれる符号化かつ復号済み(以下、単に「符号化済み」とも記す)の属性情報を用いて生成する。このように、三次元データ符号化装置は、LoDnに含まれる三次元点の属性情報の予測値を、LoDn’(n’<=n)に含まれる符号化済みの属性情報を用いて生成する。つまり、三次元データ符号化装置は、LoDnに含まれる三次元点の属性情報の予測値の算出に、LoDnの下層に含まれる三次元点の属性情報を用いない。
例えば、三次元データ符号化装置は、三次元点の属性情報の予測値を、符号化対象の対象三次元点の周辺の符号化済みの三次元点のうち、N個以下の三次元点の属性値の平均を算出することで生成する。また、三次元データ符号化装置は、Nの値を、ビットストリームのヘッダ等に付加してもよい。なお、三次元データ符号化装置は、Nの値を三次元点毎に変更し、三次元点毎にNの値を付加してもよい。これにより、三次元点毎に適切なNを選択することができるので、予測値の精度を向上できる。よって、予測残差を小さくできる。また、三次元データ符号化装置は、Nの値をビットストリームのヘッダに付加し、ビットストリーム内でNの値を固定してもよい。これにより、三次元点毎にNの値を符号化、又は復号する必要がなくなるので、処理量を削減できる。また、三次元データ符号化装置は、LoD毎にNの値を別々に符号化してもよい。これによりLoD毎に適切なNを選択することで符号化効率を向上できる。
または、三次元データ符号化装置は、三次元点の属性情報の予測値を、周囲の符号化済みのN個の三次元点の属性情報の重み付け平均値により算出してもよい。例えば、三次元データ符号化装置は、対象三次元点と周囲のN個の三次元点とのそれぞれの距離情報を用いて重みを算出する。
三次元データ符号化装置は、LoD毎にNの値を別々に符号化する場合、例えばLoDの上位層ほどNの値を大きく設定し、下位層ほどNの値を小さく設定する。LoDの上位層では属する三次元点間の距離が離れるため、Nの値を大きく設定して複数の周囲の三次元点を選択して平均化することで予測精度を向上できる可能性がある。また、LoDの下位層では属する三次元点間の距離が近いため、Nの値を小さく設定して平均化の処理量を抑えつつ、効率的な予測を行うことが可能となる。
図30は、予測値に用いる属性情報の例を示す図である。上述したように、LoDNに含まれる点Pの予測値は、LoDN’(N’<=N)に含まれる符号化済みの周囲点P’を用いて生成される。ここで、周囲点P’は、点Pとの距離に基づき選択される。例えば、図30に示す点b2の属性情報の予測値は、点a0、a1、a2、b0、b1の属性情報を用いて生成される。
上述したNの値に応じて、選択される周囲点は変化する。例えばN=5の場合は点b2の周囲点としてa0、a1、a2、b0、b1が選択される。N=4の場合は距離情報を元に点a0、a1、a2、b1を選択される。
予測値は、距離依存の重み付け平均により算出される。例えば、図30に示す例では、点a2の予測値a2pは、(式A2)及び(式A3)に示すように、点a0及び点a1の属性情報の重み付け平均により算出される。なお、Aiは点aiの属性情報の値である。
また、点b2の予測値b2pは、(式A4)~(式A6)に示すように、点a0、a1、a2、b0、b1の属性情報の重み付け平均により算出される。なお、Biは点biの属性情報の値である。
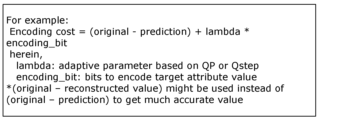
また、三次元データ符号化装置は、三次元点の属性情報の値と、周囲点から生成した予測値との差分値(予測残差)を算出し、算出した予測残差を量子化してもよい。例えば、三次元データ符号化装置は、予測残差を量子化スケール(量子化ステップとも呼ぶ)で除算することで量子化を行う。この場合、量子化スケールが小さいほど量子化によって発生しうる誤差(量子化誤差)が小さくなる。逆に量子化スケールが大きいほど量子化誤差は大きくなる。
なお、三次元データ符号化装置は、使用する量子化スケールをLoD毎に変えてもよい。例えば、三次元データ符号化装置は、上位層ほど量子化スケールを小さくし、下位層ほど量子化スケールを大きくする。上位層に属する三次元点の属性情報の値は、下位層に属する三次元点の属性情報の予測値として使用される可能性があるため、上位層の量子化スケールを小さくして上位層で発生しうる量子化誤差を抑え、予測値の精度を高めることで符号化効率を向上できる。なお、三次元データ符号化装置は、LoD毎に使用する量子化スケールをヘッダ等に付加してもよい。これにより、三次元データ復号装置は、正しく量子化スケールを復号できるので、ビットストリームを適切に復号できる。
また、三次元データ符号化装置は、量子化後の予測残差である符号付整数値(符号付量子化値)を符号なし整数値(符号なし量子化値)に変換してもよい。これにより予測残差をエントロピー符号化する場合に、負の整数の発生を考慮する必要がなくなる。なお、三次元データ符号化装置は、必ずしも符号付整数値を符号なし整数値に変換する必要はなく、例えば符号ビットを別途エントロピー符号化してもよい。
予測残差は、元の値から予測値を減算することにより算出される。例えば、点a2の予測残差a2rは、(式A7)に示すように、点a2の属性情報の値A2から、点a2の予測値a2pを減算することで算出される。点b2の予測残差b2rは、(式A8)に示すように、点b2の属性情報の値B2から、点b2の予測値b2pを減算することで算出される。
a2r=A2-a2p ・・・(式A7)
b2r=B2-b2p ・・・(式A8)
また、予測残差は、QS(量子化ステップ(Quantization Step))で除算されることで量子化される。例えば、点a2の量子化値a2qは、(式A9)により算出される。点b2の量子化値b2qは、(式A10)により算出される。ここで、QS_LoD0は、LoD0用のQSであり、QS_LoD1は、LoD1用のQSである。つまり、LoDに応じてQSが変更されてもよい。
a2q=a2r/QS_LoD0 ・・・(式A9)
b2q=b2r/QS_LoD1 ・・・(式A10)
また、三次元データ符号化装置は、以下のように、上記量子化値である符号付整数値を符号なし整数値に変換する。三次元データ符号化装置は、符号付整数値a2qが0より小さい場合、符号なし整数値a2uを-1-(2×a2q)に設定する。三次元データ符号化装置は、符号付整数値a2qが0以上の場合、符号なし整数値a2uを2×a2qに設定する。
同様に、三次元データ符号化装置は、符号付整数値b2qが0より小さい場合、符号なし整数値b2uを-1-(2×b2q)に設定する。三次元データ符号化装置は、符号付整数値b2qが0以上の場合、符号なし整数値b2uを2×b2qに設定する。
また、三次元データ符号化装置は、量子化後の予測残差(符号なし整数値)を、エントロピー符号化によって符号化してもよい。例えば符号なし整数値を二値化したうえで、二値の算術符号化を適用してもよい。
なお、この場合、三次元データ符号化装置は、予測残差の値に応じて二値化方法を切替えてもよい。例えば、三次元データ符号化装置は、予測残差puが閾値R_THより小さい場合は、閾値R_THを表現するために必要な固定ビット数で予測残差puを二値化する。また、三次元データ符号化装置は、予測残差puが閾値R_TH以上の場合は、閾値R_THの二値化データと(pu-R_TH)の値を指数ゴロム(Exponential-Golomb)等を用いて二値化する。
例えば、三次元データ符号化装置は、閾値R_THが63であり、予測残差puが63より小さい場合は、予測残差puを6bitで二値化する。また、三次元データ符号化装置は、予測残差puが63以上である場合は、閾値R_THの二値データ(111111)と(pu-63)とを指数ゴロムを用いて二値化することで算術符号化を行う。
より具体的な例では、三次元データ符号化装置は、予測残差puが32である場合、6bitの二値データ(100000)を生成し、このビット列を算術符号化する。また、三次元データ符号化装置は、予測残差puが66の場合、閾値R_THの二値データ(111111)と値3(66-63)を指数ゴロムで表したビット列(00100)とを生成し、このビット列(111111+00100)を算術符号化する。
このように、三次元データ符号化装置は、予測残差の大きさに応じて二値化の方法を切替えることで、予測残差が大きくなった場合の二値化ビット数の急激な増加を抑えながら符号化することが可能となる。なお、三次元データ符号化装置は、閾値R_THをビットストリームのヘッダ等に付加してもよい。
例えば、高ビットレートで符号化が行われる場合、つまり、量子化スケールが小さい場合、量子化誤差が小さく予測精度が高くなり、結果として予測残差が大きくならない可能性がある。よって、この場合には、三次元データ符号化装置は、閾値R_THを大きく設定する。これにより、閾値R_THの二値化データを符号化する可能性が低くなり、符号化効率が向上する。逆に、低ビットレートで符号化が行われる場合、つまり、量子化スケールが大きい場合、量子化誤差が大きく予測精度が悪くなり、結果として予測残差が大きくなる可能性がある。よって、この場合には、三次元データ符号化装置は、閾値R_THを小さく設定する。これにより、二値化データの急激なビット長増加を防ぐことができる。
また、三次元データ符号化装置は、LoD毎に閾値R_THを切り替え、LoD毎の閾値R_THをヘッダ等に付加してもよい。つまり、三次元データ符号化装置は、LoD毎に二値化の方法を切替えてもよい。例えば、上位層では三次元点間の距離が遠いため、予測精度が悪く結果として予測残差が大きくなる可能性がある。よって、三次元データ符号化装置は、上位層に対しては閾値R_THを小さく設定することで二値化データの急激なビット長増加を防ぐ。また、下位層では三次元点間の距離が近いため、予測精度が高く結果として予測残差が小さくなる可能性がある。よって、三次元データ符号化装置は、階層に対しては閾値R_THを大きく設定することで符号化効率を向上する。
図31は、指数ゴロム符号の一例を示す図であって、二値化前の値(多値)と、二値化後のビット(符号)との関係を示す図である。なお、図31に示す0と1とを反転させてもよい。
また、三次元データ符号化装置は、予測残差の二値化データに算術符号化を適用する。これにより、符号化効率を向上できる。なお、算術符号化の適用時に、二値化データのうち、nビットで二値化した部分であるnビット符号(n-bit code)と、指数ゴロムを用いて二値化した部分である残り符号(remaining code)とで、各ビットの0と1の出現確率の傾向は異なる可能性がある。よって、三次元データ符号化装置は、nビット符号と残り符号とで、算術符号化の適用方法を切替えてもよい。
例えば、三次元データ符号化装置は、nビット符号に対しては、ビット毎に異なる符号化テーブル(確率テーブル)を用いて算術符号化を行う。この際、三次元データ符号化装置は、ビット毎に使用する符号化テーブルの数を変えてもよい。例えば、三次元データ符号化装置は、nビット符号の先頭ビットb0には1個の符号化テーブルを用いて算術符号化を行う。また、三次元データ符号化装置は、次のビットb1に対しては2個の符号化テーブルを用いる。また、三次元データ符号化装置は、b0の値(0又は1)に応じてビットb1の算術符号化に用いる符号化テーブルを切替える。同様に、三次元データ符号化装置は、更に次のビットb2に対しては4個の符号化テーブルを用いる。また、三次元データ符号化装置は、b0及びb1の値(0~3)に応じて、ビットb2の算術符号化に用いる符号化テーブルを切替える。
このように、三次元データ符号化装置は、nビット符号の各ビットbn-1を算術符号化する際に、2n-1個の符号化テーブルを用いる。また、三次元データ符号化装置は、bn-1より前のビットの値(発生パターン)に応じて、使用する符号化テーブルを切替える。これにより、三次元データ符号化装置は、ビット毎に適切な符号化テーブルを使用できるので、符号化効率を向上できる。
なお、三次元データ符号化装置は、各ビットで使用する符号化テーブルの数を削減してもよい。例えば、三次元データ符号化装置は、各ビットbn-1を算術符号化する際に、bn-1より前のmビット(m<n-1)の値(発生パターン)に応じて2m個の符号化テーブルを切替えてもよい。これにより各ビットで使用する符号化テーブルの数を抑えつつ、符号化効率を向上できる。なお、三次元データ符号化装置は、各符号化テーブルにおける0と1の発生確率を、実際に発生した二値化データの値に応じて更新してもよい。また、三次元データ符号化装置は、一部のビットの符号化テーブルにおける0と1の発生確率を固定化してもよい。これにより、発生確率の更新回数を抑制できるので処理量を削減できる。
例えば、nビット符号がb0b1b2…bn-1である場合、b0用の符号化テーブルは1個(CTb0)である。b1用の符号化テーブルは2個(CTb10、CTb11)である。また、b0の値(0~1)に応じて使用する符号化テーブルが切替えられる。b2用の符号化テーブルは、4個(CTb20、CTb21、CTb22、CTb23)である。また、b0及びb1の値(0~3)に応じて使用する符号化テーブルが切替えられる。bn-1用の符号化テーブルは2n-1個(CTbn0、CTbn1、…、CTbn(2n-1-1))である。また、b0b1…bn-2の値(0~2n-1-1)に応じて使用する符号化テーブルを切替えられる。
なお、三次元データ符号化装置は、nビット符号に対しては、二値化せずに0~2n-1の値を設定するm-aryによる算術符号化(m=2n)を適用してもよい。また、三次元データ符号化装置が、nビット符号をm-aryで算術符号化する場合は、三次元データ復号装置もm-aryの算術復号によりnビット符号を復元してもよい。
図32は、例えば、残り符号が指数ゴロム符号の場合の処理を説明するための図である。指数ゴロムを用いて二値化した部分である残り符号は、図32に示すようにprefix部とsuffix部とを含む。例えば、三次元データ符号化装置は、prefix部とsuffix部とで符号化テーブルを切替える。つまり、三次元データ符号化装置は、prefix部に含まれる各ビットを、prefix用の符号化テーブルを用いて算術符号化し、suffix部に含まれる各ビットを、suffix用の符号化テーブルを用いて算術符号化する。
なお、三次元データ符号化装置は、各符号化テーブルにおける0と1の発生確率を、実際に発生した二値化データの値に応じて更新してもよい。または、三次元データ符号化装置は、どちらかの符号化テーブルにおける0と1の発生確率を固定化してもよい。これにより、発生確率の更新回数を抑制できるので処理量を削減できる。例えば、三次元データ符号化装置は、prefix部に対して発生確率を更新し、suffix部に対して発生確率を固定化してもよい。
また、三次元データ符号化装置は、量子化後の予測残差を、逆量子化及び再構成することで復号し、復号した予測残差である復号値を符号化対象の三次元点以降の予測に利用する。具体的には、三次元データ符号化装置は、量子化後の予測残差(量子化値)に量子化スケールを乗算することで逆量子化値を算出し、逆量子化値と予測値とを加算して復号値(再構成値)を得る。
例えば、点a2の逆量子化値a2iqは、点a2の量子化値a2qを用いて(式A11)により算出される。点b2の逆量子化値b2iqは、点b2の量子化値b2qを用いて(式A12)により算出される。ここで、QS_LoD0は、LoD0用のQSであり、QS_LoD1は、LoD1用のQSである。つまり、LoDに応じてQSが変更されてもよい。
a2iq=a2q×QS_LoD0 ・・・(式A11)
b2iq=b2q×QS_LoD1 ・・・(式A12)
例えば、点a2の復号値a2recは、(式A13)に示すように、点a2の逆量子化値a2iqに、点a2の予測値a2pを加算することで算出される。点b2の復号値b2recは、(式A14)に示すように、点b2の逆量子化値b2iqに、点b2の予測値b2pを加算することで算出される。
a2rec=a2iq+a2p ・・・(式A13)
b2rec=b2iq+b2p ・・・(式A14)
以下、本実施の形態に係るビットストリームのシンタックス例を説明する。図33は、本実施の形態に係る属性ヘッダ(attribute_header)のシンタックス例を示す図である。属性ヘッダは、属性情報のヘッダ情報である。図33に示すように、属性ヘッダは、階層数情報(NumLoD)と、三次元点数情報(NumOfPoint[i])と、階層閾値(Thres_Lod[i])と、周囲点数情報(NumNeighorPoint[i])と、予測閾値(THd[i])と、量子化スケール(QS[i])と、二値化閾値(R_TH[i])とを含む。
階層数情報(NumLoD)は、用いられるLoDの階層数を示す。
三次元点数情報(NumOfPoint[i])は、階層iに属する三次元点の数を示す。なお、三次元データ符号化装置は、三次元点の総数を示す三次元点総数情報(AllNumOfPoint)を別のヘッダに付加してもよい。この場合、三次元データ符号化装置は、最下層に属する三次元点の数を示すNumOfPoint[NumLoD-1]をヘッダに付加しなくてもよい。この場合、三次元データ復号装置は、(式A15)によりNumOfPoint[NumLoD-1]を算出できる。これにより、ヘッダの符号量を削減できる。
階層閾値(Thres_Lod[i])は、階層iの設定に用いられる閾値である。三次元データ符号化装置及び三次元データ復号装置は、LoDi内の各点の間の距離が閾値Thres_LoD[i]より大きくなるようにLoDiを構成する。また、三次元データ符号化装置は、Thres_Lod[NumLoD-1](最下層)の値をヘッダに付加しなくてもよい。この場合、三次元データ復号装置は、Thres_Lod[NumLoD-1]の値を0と推定する。これによりヘッダの符号量を削減できる。
周囲点数情報(NumNeighorPoint[i])は、階層iに属する三次元点の予測値の生成に用いる周囲の点数の上限値を示す。三次元データ符号化装置は、周囲の点数MがNumNeighorPoint[i]に満たない場合(M<NumNeighorPoint[i])は、M個の周囲の点数を用いて予測値を算出してもよい。また、三次元データ符号化装置は、各LoDでNumNeighorPoint[i]の値を分ける必要がない場合は、全てのLoDで使用される1個の周囲点数情報(NumNeighorPoint)をヘッダに付加してもよい。
予測閾値(THd[i])は、階層iにて符号化又は復号対象の対象三次元点の予測に用いる周囲の三次元点と対象三次元点との距離の上限値を示す。三次元データ符号化装置及び三次元データ復号装置は、対象三次元点からの距離がTHd[i]より離れている三次元点を予測に用いない。なお、三次元データ符号化装置は、各LoDでTHd[i]の値を分ける必要がない場合は、全てのLoDで使用される1個の予測閾値(THd)をヘッダに付加してもよい。
量子化スケール(QS[i])は、階層iの量子化及び逆量子化で用いられる量子化スケールを示す。
二値化閾値(R_TH[i])は、階層iに属する三次元点の予測残差の二値化方法を切替えるための閾値である。例えば、三次元データ符号化装置は、予測残差が閾値R_THより小さい場合は、固定ビット数で予測残差puを二値化し、予測残差が閾値R_TH以上の場合は、閾値R_THの二値化データと(pu-R_TH)の値を指数ゴロムを用いて二値化する。なお、各LoDでR_TH[i]の値を切替える必要がない場合は、三次元データ符号化装置は、全てのLoDで使用される1個の二値化閾値(R_TH)をヘッダに付加してもよい。
なお、R_TH[i]はnbitで表せる最大値であってもよい。例えば6bitではR_THは63であり、8bitではR_THは255である。また、三次元データ符号化装置は、二値化閾値としてnbitで表せる最大値を符号化する代わりに、ビット数を符号化してもよい。例えば、三次元データ符号化装置は、R_TH[i]=63の場合は値6を、R_TH[i]=255の場合は値8をヘッダに付加してもよい。また、三次元データ符号化装置は、R_TH[i]を表すビット数の最小値(最小ビット数)を定義し、最小値からの相対ビット数をヘッダに付加してもよい。例えば、三次元データ符号化装置は、R_TH[i]=63で最小ビット数が6の場合は値0をヘッダに付加し、R_TH[i]=255で最小ビット数が6の場合は値2をヘッダに付加してもよい。
また、三次元データ符号化装置は、NumLoD、Thres_Lod[i]、NumNeighborPoint[i]、THd[i]、QS[i]及びR_TH[i]の少なくとも一つをエントロピー符号化してヘッダに付加してもよい。例えば、三次元データ符号化装置は、各値を二値化して算術符号化してもよい。また、三次元データ符号化装置は、処理量を抑えるために各値を固定長で符号化してもよい。
また、三次元データ符号化装置は、NumLoD、Thres_Lod[i]、NumNeighborPoint[i]、THd[i]、QS[i]、及びR_TH[i]の少なくとも一つをヘッダに付加しなくてもよい。例えば、これらのうちの少なくとも一つの値が、規格等のprofile又はlevel等で規定されてもよい。これによりヘッダのビット量を削減することができる。
図34は、本実施の形態に係る属性データ(attribute_data)のシンタックス例を示す図である。この属性データは、複数の三次元点の属性情報の符号化データを含む。図34に示すように属性データは、nビット符号(n-bit code)と、残り符号(remaining code)とを含む。
nビット符号は(n-bit code)は、属性情報の値の予測残差の符号化データ又はその一部である。nビット符号のビット長はR_TH[i]の値に依存する。例えばR_TH[i]の示す値が63の場合、nビット符号は6bitであり、R_TH[i]の示す値が255の場合、nビット符号は8bitである。
残り符号(remaining code)は、属性情報の値の予測残差の符号化データのうち、指数ゴロムで符号化された符号化データである。この残り符号は、nビット符号がR_TH[i]と同じ場合に符号化又は復号される。また、三次元データ復号装置は、nビット符号の値と残り符号の値を加算して予測残差を復号する。なお、nビット符号がR_TH[i]と同じ値でない場合は、残り符号は符号化又は復号されなくてもよい。
以下、三次元データ符号化装置における処理の流れを説明する。図35は、三次元データ符号化装置による三次元データ符号化処理のフローチャートである。
まず、三次元データ符号化装置は、位置情報(geometry)を符号化する(S3001)。例えば、三次元データ符号化は、8分木表現を用いて符号化を行う。
三次元データ符号化装置は、位置情報の符号化後に、量子化等によって三次元点の位置が変化した場合に、変化後の三次元点に元の三次元点の属性情報を再割り当てする(S3002)。例えば、三次元データ符号化装置は、位置の変化量に応じて属性情報の値を補間することで再割り当てを行う。例えば、三次元データ符号化装置は、変化後の三次元位置に近い変化前の三次元点をN個検出し、N個の三次元点の属性情報の値を重み付け平均する。例えば、三次元データ符号化装置は、重み付け平均において、変化後の三次元位置から各N個の三次元までの距離に基づいて重みを決定する。そして、三次元データ符号化装置は、重み付け平均により得られた値を変化後の三次元点の属性情報の値に決定する。また、三次元データ符号化装置は、量子化等によって2個以上の三次元点が同一の三次元位置に変化した場合は、その変化後の三次元点の属性情報の値として、変化前の2個以上の三次元点の属性情報の平均値を割当ててもよい。
次に、三次元データ符号化装置は、再割り当て後の属性情報(Attribute)を符号化する(S3003)。例えば、三次元データ符号化装置は、複数種類の属性情報を符号化する場合は、複数種類の属性情報を順に符号化してもよい。例えば、三次元データ符号化装置は、属性情報として、色と反射率とを符号化する場合は、色の符号化結果の後に反射率の符号化結果を付加したビットストリームを生成してもよい。なお、ビットストリームに付加される属性情報の複数の符号化結果の順番は、この順に限らず、どのような順番でもよい。
また、三次元データ符号化装置は、ビットストリーム内の各属性情報の符号化データ開始場所を示す情報をヘッダ等に付加してもよい。これにより、三次元データ復号装置は、復号が必要な属性情報を選択的に復号できるので、復号が不必要な属性情報の復号処理を省略できる。よって、三次元データ復号装置の処理量を削減できる。また、三次元データ符号化装置は、複数種類の属性情報を並列に符号化し、符号化結果を1つのビットストリームに統合してもよい。これにより、三次元データ符号化装置は、高速に複数種類の属性情報を符号化できる。
図36は、属性情報符号化処理(S3003)のフローチャートである。まず、三次元データ符号化装置は、LoDを設定する(S3011)。つまり、三次元データ符号化装置は、各三次元点を複数のLoDのいずれかに割り当てる。
次に、三次元データ符号化装置は、LoD単位のループを開始する(S3012)。つまり、三次元データ符号化装置は、LoD毎にステップS3013~S3021の処理を繰り返し行う。
次に、三次元データ符号化装置は、三次元点単位のループを開始する(S3013)。つまり、三次元データ符号化装置は、三次元点毎にステップS3014~S3020の処理を繰り返し行う。
まず、三次元データ符号化装置は、処理対象の対象三次元点の予測値の算出に用いる、対象三次元点の周囲に存在する三次元点である複数の周囲点を探索する(S3014)。次に、三次元データ符号化装置は、複数の周囲点の属性情報の値の重み付け平均を算出し、得られた値を予測値Pに設定する(S3015)。次に、三次元データ符号化装置は、対象三次元点の属性情報と予測値との差分である予測残差を算出する(S3016)。次に、三次元データ符号化装置は、予測残差を量子化することで量子化値を算出する(S3017)。次に、三次元データ符号化装置は、量子化値を算術符号化する(S3018)。
また、三次元データ符号化装置は、量子化値を逆量子化することで逆量子化値を算出する(S3019)。次に、三次元データ符号化装置は、逆量子化値に予測値を加算することで復号値を生成する(S3020)。次に、三次元データ符号化装置は、三次元点単位のループを終了する(S3021)。また、三次元データ符号化装置は、LoD単位のループを終了する(S3022)。
以下、上記の三次元データ符号化装置により生成されたビットストリームを復号する三次元データ復号装置における三次元データ復号処理について説明する。
三次元データ復号装置は、三次元データ符号化装置によって生成されたビットストリーム内の属性情報の二値化データを、三次元データ符号化装置と同様の方法で算術復号することで、復号された二値化データを生成する。なお、三次元データ符号化装置において、nビットで二値化した部分(nビット符号)と、指数ゴロムを用いて二値化した部分(残り符号)とで算術符号化の適用方法を切替えた場合は、三次元データ復号装置は、算術復号適用時に、それに合わせて復号を行う。
例えば、三次元データ復号装置は、nビット符号の算術復号方法において、ビット毎に異なる符号化テーブル(復号テーブル)を用いて算術復号を行う。この際、三次元データ復号装置は、ビット毎に使用する符号化テーブルの数を変えてもよい。例えば、nビット符号の先頭ビットb0には1個の符号化テーブルを用いて算術復号を行う。また、三次元データ復号装置は、次のビットb1に対しては2個の符号化テーブルを用いる。また、三次元データ復号装置は、b0の値(0又は1)に応じてビットb1の算術復号に用いる符号化テーブルを切替える。同様に、三次元データ復号装置は、更に次のビットb2に対しては4個の符号化テーブルを用いる。また、三次元データ復号装置は、b0及びb1の値(0~3)に応じて、ビットb2の算術復号に用いる符号化テーブルを切替える。
このように、三次元データ復号装置は、nビット符号の各ビットbn-1を算術復号する際に、2n-1個の符号化テーブルを用いる。また、三次元データ復号装置は、bn-1より前のビットの値(発生パターン)に応じて、使用する符号化テーブルを切替える。これにより、三次元データ復号装置は、ビット毎に適切な符号化テーブルを使用して符号化効率を向上したビットストリームを適切に復号できる。
なお、三次元データ復号装置は、各ビットで使用する符号化テーブルの数を削減してもよい。例えば、三次元データ復号装置は、各ビットbn-1を算術復号する際に、bn-1より前のmビット(m<n-1)の値(発生パターン)に応じて2m個の符号化テーブルを切替えてもよい。これにより、三次元データ復号装置は、各ビットで使用する符号化テーブルの数を抑えつつ、符号化効率を向上したビットストリームを適切に復号できる。なお、三次元データ復号装置は、各符号化テーブルにおける0と1の発生確率を、実際に発生した二値化データの値に応じて更新してもよい。また、三次元データ復号装置は、一部のビットの符号化テーブルにおける0と1の発生確率を固定化してもよい。これにより、発生確率の更新回数を抑制できるので処理量を削減できる。
例えば、nビット符号がb0b1b2…bn-1である場合、b0用の符号化テーブルは1個(CTb0)である。b1用の符号化テーブルは2個(CTb10、CTb11)である。また、b0の値(0~1)に応じて符号化テーブルが切替えられる。b2用の符号化テーブルは4個(CTb20、CTb21、CTb22、CTb23)である。また、b0及びb1の値(0~3)に応じて符号化テーブルが切替えられる。bn-1用の符号化テーブルは、2n-1個(CTbn0、CTbn1、…、CTbn(2n-1-1))である。また、b0b1…bn-2の値(0~2n-1-1)に応じて符号化テーブルが切替えられる。
図37は、例えば、残り符号が指数ゴロム符号である場合の処理を説明するための図である。三次元データ符号化装置が指数ゴロムを用いて二値化して符号化した部分(残り符号)は、図37に示すようにprefix部とsuffix部とを含む。例えば、三次元データ復号装置は、prefix部とsuffix部とで符号化テーブルを切替える。つまり、三次元データ復号装置は、prefix部に含まれる各ビットを、prefix用の符号化テーブルを用いて算術復号し、suffix部に含まれる各ビットを、suffix用の符号化テーブルを用いて算術復号する。
なお、三次元データ復号装置は、各符号化テーブルにおける0と1の発生確率を、復号時に発生した二値化データの値に応じて更新してもよい。または、三次元データ復号装置は、どちらかの符号化テーブルにおける0と1の発生確率を固定化してもよい。これにより、発生確率の更新回数を抑制できるので処理量を削減できる。例えば、三次元データ復号装置は、prefix部に対して発生確率を更新し、suffix部に対して発生確率を固定化してもよい。
また、三次元データ復号装置は、算術復号した予測残差の二値化データを、三次元データ符号化装置で用いられた符号化方法に合わせて多値化することで量子化後の予測残差(符号なし整数値)を復号する。三次元データ復号装置は、まずnビット符号の二値化データを算術復号することで復号したnビット符号の値を算出する。次に、三次元データ復号装置は、nビット符号の値とR_THの値とを比較する。
三次元データ復号装置は、nビット符号の値とR_THの値とが一致した場合、指数ゴロムで符号化されたビットが次に存在すると判定し、指数ゴロムで符号化された二値化データである残り符号を算術復号する。そして、三次元データ復号装置は、復号した残り符号から、残り符号とその値との関係を示す逆引きテーブルを用いて残り符号の値を算出する。図38は、残り符号とその値との関係を示す逆引きテーブルの例を示す図である。次に、三次元データ復号装置は、得られた残り符号の値をR_THに加算することで多値化された量子化後の予測残差を得る。
一方、三次元データ復号装置は、nビット符号の値とR_THの値とが一致しない(R_THより値が小さい)場合、nビット符号の値をそのまま、多値化された量子化後の予測残差に決定する。これにより、三次元データ復号装置は、三次元データ符号化装置で予測残差の値に応じて二値化方法を切替えて生成したビットストリームを適切に復号できる。
なお、三次元データ復号装置は、閾値R_THがビットストリームのヘッダ等に付加されている場合は、閾値R_THの値をヘッダから復号し、復号した閾値R_THの値を用いて復号方法を切替えてもよい。また、三次元データ復号装置は、LoD毎に閾値R_THがヘッダ等に付加されている場合、LoD毎に復号した閾値R_THを用いて復号方法を切替える。
例えば、閾値R_THが63であり、復号したnビット符号の値が63である場合、三次元データ復号装置は、残り符号を指数ゴロムにより復号することで残り符号の値を得る。例えば、図38に示す例では、残り符号が00100であり、残り符号の値として3が得られる。次に、三次元データ復号装置は、閾値R_THの値63と、残り符号の値3とを加算することで予測残差の値66を得る。
また、復号したnビット符号の値が32である場合、三次元データ復号装置は、nビット符号の値32を予測残差の値に設定する。
また、三次元データ復号装置は、復号した量子化後の予測残差を、例えば、三次元データ符号化装置における処理と逆の処理により、符号なし整数値から符号付整数値に変換する。これにより、三次元データ復号装置は、予測残差をエントロピー符号化する場合に、負の整数の発生を考慮せずに生成したビットストリームを適切に復号できる。なお、三次元データ復号装置は、必ずしも符号なし整数値を符号付整数値に変換する必要はなく、例えば符号ビットを別途エントロピー符号化して生成されたビットストリームを復号する場合は、符号ビットを復号してもよい。
三次元データ復号装置は、符号付整数値に変換した量子化後の予測残差を、逆量子化及び再構成によって復号することで復号値を生成する。また、三次元データ復号装置は、生成した復号値を、復号対象の三次元点以降の予測に利用する。具体的には、三次元データ復号装置は、量子化後の予測残差に、復号した量子化スケールを乗算することで逆量子化値を算出し、逆量子化値と予測値とを加算して復号値を得る。
復号された符号なし整数値(符号なし量子化値)は、以下の処理により符号付整数値に変換される。三次元データ復号装置は、復号された符号なし整数値a2uのLSB(least significant bit)が1である場合、符号付整数値a2qを-((a2u+1)>>1)に設定する。三次元データ復号装置は、符号なし整数値a2uのLSBが1でない場合、符号付整数値a2qを(a2u>>1)に設定する。
同様に、三次元データ復号装置は、復号された符号なし整数値b2uのLSBが1である場合、符号付整数値b2qを-((b2u+1)>>1)に設定する。三次元データ復号装置は、符号なし整数値n2uのLSBが1でない場合、符号付整数値b2qを(b2u>>1)に設定する。
また、三次元データ復号装置による逆量子化及び再構成処理の詳細は、三次元データ符号化装置における逆量子化及び再構成処理と同様である。
以下、三次元データ復号装置における処理の流れを説明する。図39は、三次元データ復号装置による三次元データ復号処理のフローチャートである。まず、三次元データ復号装置は、ビットストリームから位置情報(geometry)を復号する(S3031)。例えば、三次元データ復号装置は、8分木表現を用いて復号を行う。
次に、三次元データ復号装置は、ビットストリームから属性情報(Attribute)を復号する(S3032)。例えば、三次元データ復号装置は、複数種類の属性情報を復号する場合は、複数種類の属性情報を順に復号してもよい。例えば、三次元データ復号装置は、属性情報として色と反射率とを復号する場合は、ビットストリームに付加されている順に従い、色の符号化結果と反射率の符号化結果とを復号する。例えば、ビットストリームにおいて、色の符号化結果の後に反射率の符号化結果が付加されている場合、三次元データ復号装置は、色の符号化結果を復号し、その後に反射率の符号化結果を復号する。なお、三次元データ復号装置は、ビットストリームに付加される属性情報の符号化結果をどのような順番で復号してもよい。
また、三次元データ復号装置は、ビットストリーム内の各属性情報の符号化データ開始場所を示す情報を、ヘッダ等を復号することで取得してもよい。これにより、三次元データ復号装置は、復号が必要な属性情報を選択的に復号できるので、復号が不必要な属性情報の復号処理を省略できる。よって、三次元データ復号装置の処理量を削減できる。また、三次元データ復号装置は、複数種類の属性情報を並列に復号し、復号結果を1つの三次元点群に統合してもよい。これにより、三次元データ復号装置は、高速に複数種類の属性情報を復号できる。
図40は、属性情報復号処理(S3032)のフローチャートである。まず、三次元データ復号装置は、LoDを設定する(S3041)。つまり、三次元データ復号装置は、復号された位置情報を有する複数の三次元点の各々を複数のLoDのいずれかに割り当てる。例えば、この割り当て方法は、三次元データ符号化装置で用いられた割り当て方法と同じ方法である。
次に、三次元データ復号装置は、LoD単位のループを開始する(S3042)。つまり、三次元データ復号装置は、LoD毎にステップS3043~S3049の処理を繰り返し行う。
次に、三次元データ復号装置は、三次元点単位のループを開始する(S3043)。つまり、三次元データ復号装置は、三次元点毎にステップS3044~S3048の処理を繰り返し行う。
まず、三次元データ復号装置は、処理対象の対象三次元点の予測値の算出に用いる、対象三次元点の周囲に存在する三次元点である複数の周囲点を探索する(S3044)。次に、三次元データ復号装置は、複数の周囲点の属性情報の値の重み付け平均を算出し、得られた値を予測値Pに設定する(S3045)。なお、これらの処理は三次元データ符号化装置における処理と同様である。
次に、三次元データ復号装置は、ビットストリームから量子化値を算術復号する(S3046)。また、三次元データ復号装置は、復号した量子化値を逆量子化することで逆量子化値を算出する(S3047)。次に、三次元データ復号装置は、逆量子化値に予測値を加算することで復号値を生成する(S3048)。次に、三次元データ復号装置は、三次元点単位のループを終了する(S3049)。また、三次元データ復号装置は、LoD単位のループを終了する(S3050)。
次に、本実施の形態に係る三次元データ符号化装置及び三次元データ復号装置の構成を説明する。図41は、本実施の形態に係る三次元データ符号化装置3000の構成を示すブロック図である。この三次元データ符号化装置3000は、位置情報符号化部3001と、属性情報再割り当て部3002と、属性情報符号化部3003とを備える。
属性情報符号化部3003は、入力点群に含まれる複数の三次元点の位置情報(geometry)を符号化する。属性情報再割り当て部3002は、入力点群に含まれる複数の三次元点の属性情報の値を、位置情報の符号化及び復号結果を用いて再割り当てする。属性情報符号化部3003は、再割り当てされた属性情報(attribute)を符号化する。また、三次元データ符号化装置3000は、符号化された位置情報及び符号化された属性情報を含むビットストリームを生成する。
図42は、本実施の形態に係る三次元データ復号装置3010の構成を示すブロック図である。この三次元データ復号装置3010は、位置情報復号部3011と、属性情報復号部3012とを含む。
位置情報復号部3011は、ビットストリームから複数の三次元点の位置情報(geometry)を復号する。属性情報復号部3012は、ビットストリームから複数の三次元点の属性情報(attribute)を復号する。また、三次元データ復号装置3010は、復号した位置情報と復号した属性情報とを結合することで出力点群を生成する。
(実施の形態8)
以下、三次元点の属性情報を符号化する別の方法として、RAHT(Region Adaptive Hierarchical Transform)を用いた方法を説明する。図43は、RAHTを用いた属性情報の符号化を説明するための図である。
まず、三次元データ符号化装置は、三次元点の位置情報に基づきモートン符号(Morton code)を生成し、モートン符号順に三次元点の属性情報をソートする。例えば、三次元データ符号化装置は、モートン符号の昇順にソートを行ってもよい。なお、ソート順はモートン符号順に限らず、他の順序が用いられてもよい。
次に、三次元データ符号化装置は、モートン符号順で隣り合う2つの三次元点の属性情報に対し、Haar変換を適用することで、階層Lの高周波成分と低周波成分を生成する。例えば、三次元データ符号化装置は、2×2行列のHaar変換を用いてもよい。生成された高周波成分は階層Lの高周波成分として符号化係数に含められ、生成された低周波成分は階層Lの上位階層L+1の入力値として用いられる。
三次元データ符号化装置は、階層Lの属性情報を用いて階層Lの高周波成分を生成後、引き続き階層L+1の処理を行う。階層L+1の処理では、三次元データ符号化装置は、階層Lの属性情報のHaar変換によって得られた2つの低周波成分にHaar変換を適用することで階層L+1の高周波成分と低周波成分を生成する。生成された高周波成分は階層L+1の高周波成分として符号化係数に含められ、生成された低周波成分は階層L+1の上位階層L+2の入力値として用いられる。
三次元データ符号化装置は、このような階層処理を繰返し、階層に入力される低周波成分が1個になった時点で、最上位階層Lmaxに到達したと判定する。三次元データ符号化装置は、階層Lmaxに入力された階層Lmax-1の低周波成分を符号化係数に含める。そして、符号化係数に含まれる低周波成分又は高周波成分の値を量子化し、エントロピー符号化等を用いて符号化する。
なお、三次元データ符号化装置は、Haar変換適用時に隣り合う2つの三次元点として1つの三次元点のみが存在する場合は、存在する1つの三次元点の属性情報の値を上位階層の入力値として用いてもよい。
このように、三次元データ符号化装置は、入力された属性情報に対して階層的にHaar変換を適用し、属性情報の高周波成分と低周波成分を生成し、後述する量子化等を適用して符号化を行う。これにより、符号化効率を向上できる。
属性情報がN次元である場合、三次元データ符号化装置は、次元毎に独立にHaar変換を適用し、それぞれの符号化係数を算出してもよい。例えば、属性情報が色情報(RGB又はYUV等)である場合、三次元データ符号化装置は、成分毎にHaar変換を適用し、それぞれの符号化係数を算出する。
三次元データ符号化装置は、階層L、L+1、…、階層Lmaxの順にHaar変換を適用してもよい。階層Lmaxに近づくほど入力された属性情報の低周波成分を多く含む符号化係数が生成される。
図43に示すw0及びw1は、各三次元点に割当てられる重みである。例えば、三次元データ符号化装置は、Haar変換を適用する隣り合う2つの三次元点間の距離情報等に基づき重みを算出してもよい。例えば、三次元データ符号化装置は、距離が近いほど重みを大きくすることで符号化効率を向上してもよい。なお、三次元データ符号化装置は、この重みを別の手法により算出してもよいし、重みを用いなくてもよい。
図43に示す例では、入力属性情報は、a0、a1、a2、a3、a4及びa5である。また、Haar変換後の符号化係数のうち、Ta1、Ta5、Tb1、Tb3、Tc1、d0が符号化される。他の符号化係数(b0、b2、c0等)は中間値であり、符号化されない。
具体的には、図43に示す例では、a0とa1とにHaar変換が行われることで、高周波成分Ta1と、低周波成分b0とが生成される。ここで、重みw0とw1とが等しい場合には、低周波成分b0は、a0とa1との平均値であり、高周波成分Ta1は、a0とa1との差分である。
a2には対となる属性情報が存在しないため、a2がそのままb1として用いられる。同様に、a3には対となる属性情報が存在しないため、a3がそのままb2として用いられる。また、a4とa5とにHaar変換が行われることで、高周波成分Ta5と、低周波成分b3とが生成される。
階層L+1では、b0とb1とにHaar変換が行われることで、高周波成分Tb1と、低周波成分c0とが生成される。同様に、b2とb3とにHaar変換が行われることで、高周波成分Tb3と、低周波成分c1とが生成される。
階層Lmax-1では、c0とc1とにHaar変換が行われることで、高周波成分Tc1と、低周波成分d0とが生成される。
三次元データ符号化装置は、Haar変換適用後の符号化係数を量子化したうえで符号化してもよい。例えば、三次元データ符号化装置は、符号化係数を量子化スケール(量子化ステップ(QS(Quantization Step))とも呼ぶ)で除算することで量子化を行う。この場合、量子化スケールが小さいほど量子化によって発生しうる誤差(量子化誤差)が小さくなる。逆に量子化スケールが大きいほど量子化誤差は大きくなる。
なお、三次元データ符号化装置は、量子化スケールの値を階層毎に変えてもよい。図44は、階層毎に量子化スケールを設定する例を示す図である。例えば、三次元データ符号化装置は、上位層ほど量子化スケールを小さくし、下位層ほど量子化スケールを大きくする。上位層に属する三次元点の符号化係数は、下位層よりも低周波成分を多く含むため、人間の視覚特性等で重要な成分である可能性が高い。そのため、上位層の量子化スケールを小さくして上位層で発生しうる量子化誤差を抑えることで視覚的な劣化を抑え、符号化効率を向上できる。
なお、三次元データ符号化装置は、階層毎の量子化スケールをヘッダ等に付加してもよい。これにより、三次元データ復号装置は、正しく量子化スケールを復号でき、ビットストリームを適切に復号できる。
また、三次元データ符号化装置は、量子化スケールの値を、符号化対象の対象三次元点の重要度に応じて適応的に切替えてもよい。例えば、三次元データ符号化装置は、重要度が高い三次元点には小さい量子化スケールを用い、重要度が低い三次元点には大きい量子化スケールを用いる。例えば、三次元データ符号化装置は、Haar変換時の重み等から重要度を算出してもよい。例えば、三次元データ符号化装置は、w0とw1の加算値を用いて量子化スケールを算出してもよい。このように重要度が高い三次元点の量子化スケールを小さくすることで量子化誤差が小さくなり、符号化効率を改善できる。
また、上位層ほどQSの値を小さくしてもよい。これにより、上位層ほどQWの値が大きくなり、その三次元点の量子化誤差を抑えることで予測効率を改善できる。
ここで、属性情報a1の符号化係数Ta1の量子化後の符号化係数Ta1qは、Ta1/QS_Lで表される。なお、QSは全ての階層、又は一部の階層で同じ値であってもよい。
QW(Quantization Weight)は、符号化対象の三次元点の重要度を表す値である。例えば、QWとして、上述したw0とw1の加算値が用いられてもよい。これにより、上位層ほどQWの値が大きくなり、その三次元点の量子化誤差を抑えることで予測効率を改善できる。
例えば、三次元データ符号化装置は、最初に全ての三次元点のQWの値を1で初期化し、Haar変換時のw0及びw1の値を用いて各三次元点のQWを更新してもよい。または、三次元データ符号化装置は、全ての三次元点のQWを値1で初期化せずに、階層に応じて初期値を変更してもよい。例えば、上位層ほどQWの初期値を大きく設定することで上位層の量子化スケールが小さくなる。これにより、上位層の予測誤差を抑えることができるので、下位層の予測精度を高め、符号化効率を改善できる。なお、三次元データ符号化装置は、QWを必ずしも用いなくてもよい。
QWを用いる場合、Ta1の量子化値Ta1qは、(式K1)及び(式K2)により算出される。
また、三次元データ符号化装置は、量子化後の符号化係数(符号なし整数値)を、ある順番でスキャンし、符号化する。例えば、三次元データ符号化装置は、上位層に含まれる三次元点から順に下位層に向かって複数の三次元点を符号化する。
例えば、図43に示す例の場合、三次元データ符号化装置は、上位層Lmaxに含まれるd0qからTc1q、Tb1q、Tb3q、Ta1q、Ta5qの順で複数の三次元点を符号化する。ここで、下位層Lになるほど、量子化後の符号化係数が0になりやすい傾向がある。この要因として、以下のことなどが上げられる。
下位層Lの符号化係数は、上位層より高い周波数成分を示すため、対象三次元点によっては0になりやすい傾向がある。また、上述した重要度等に応じた量子化スケールの切り替えにより、下位層ほど量子化スケールが大きくなり、量子化後の符号化係数が0になりやすい。
このように、下位層になるほど、量子化後の符号化係数が0になりやすく、値0が連続して第1符号列に発生しやすい。図45は、第1符号列及び第2符号列の例を示す図である。
三次元データ符号化装置は、第1符号列で値0が発生した回数をカウントし、連続した値0の代わりに、値0が連続して発生した回数を符号化する。つまり、三次元データ符号化装置は、第1符号列において連続する値0の符号化係数を0の連続回数(ZeroCnt)に置き換えることで第2符号列を生成する。これにより、量子化後の符号化係数の値0が連続した場合に、多数の0を符号化するよりも0の連続回数を符号化することで符号化効率を向上できる。
また、三次元データ符号化装置は、ZeroCntの値をエントロピー符号化してもよい。例えば、三次元データ符号化装置は、符号化三次元点の総数Tのトランケットユーナリ符号(truncated unary code)でZeroCntの値を二値化し、二値化後の各ビットを算術符号化する。図46は、符号化三次元点の総数がTの場合のトランケットユーナリ符号の例を示す図である。この際、三次元データ符号化装置は、ビット毎に異なる符号化テーブルを用いることで符号化効率を向上してもよい。例えば、三次元データ符号化装置は、1ビット目には符号化テーブル1を用い、2ビット目には符号化テーブル2を用い、それ以降のビットには符号化テーブル3を用いる。このように、三次元データ符号化装置は、ビット毎に符号化テーブルを切り替えることで符号化効率を向上できる。
また、三次元データ符号化装置は、ZeroCntを指数ゴロム(Exponential-Golomb)で二値化したうえで算術符号化してもよい。これにより、ZeroCntの値が大きくなりやすい場合に、トランケットユーナリ符号による二値化算術符号化よりも効率を向上できる。なお、三次元データ符号化装置は、トランケットユーナリ符号を用いるか指数ゴロムを用いるかを切り替えるためのフラグをヘッダに付加してもよい。これにより、三次元データ符号化装置は、最適な二値化方法を選択することで符号化効率を向上できる。また、三次元データ復号装置はヘッダに含まれるフラグを参照して二値化方法を切り替えて、ビットストリームを正しく復号できる。
三次元データ復号装置は、復号した量子化後の符号化係数を、三次元データ符号化装置で行われた方法と逆の方法で符号なし整数値から符号付き整数値に変換してもよい。これにより符号化係数がエントロピー符号化される場合に、三次元データ復号装置は、負の整数の発生を考慮せずに生成されたビットストリームを適切に復号できる。なお、三次元データ復号装置は、符号化係数を必ずしも符号なし整数値から符号付き整数値に変換する必要はない。例えば、三次元データ復号装置は、別途エントロピー符号化された符号化ビットを含むビットストリームを復号する場合は、当該符号ビットを復号してもよい。
三次元データ復号装置は、符号付き整数値に変換した量子化後の符号化係数を、逆量子化、及び逆Haar変換によって復号する。また、三次元データ復号装置は、復号後の符号化係数を、復号対象の三次元点以降の予測に利用する。具体的には、三次元データ復号装置は、量子化後の符号化係数に復号した量子化スケールを乗算することで逆量子化値を算出する。次に三次元データ復号装置は、逆量子化値に後述する逆Haar変換を適用することで復号値を得る。
例えば、三次元データ復号装置は、復号された符号なし整数値を以下の方法で符号付き整数値に変換する。復号された符号なし整数値a2uのLSB(least significant bit)が1である場合、符号付き整数値Ta1qは、-((a2u+1)>>1)に設定される。復号された符号なし整数値a2uのLSBが1でない場合(0である場合)、符号付き整数値Ta1qは、(a2u>>1)に設定される。
また、Ta1の逆量子化値は、Ta1q×QS_Lで表される。ここで、Ta1qは、Ta1の量子化値である。また、QS_Lは階層Lの量子化ステップである。
また、QSは全ての階層、又は一部の階層で同じ値であってもよい。また、三次元データ符号化装置は、QSを示す情報をヘッダ等に付加してもよい。これにより、三次元データ復号装置は、三次元データ符号化装置で用いられたQSと同じQSを用いて、正しく逆量子化を行える。
次に、逆Haar変換について説明する。図47は、逆Haar変換を説明するための図である。三次元データ復号装置は、逆量子化後の符号化係数に、逆Haar変換を適用することで三次元点の属性値を復号する。
まず、三次元データ復号装置は、三次元点の位置情報に基づきモートン符号を生成し、モートン符号順に三次元点をソートする。例えば、三次元データ復号装置は、モートン符号の昇順にソートを行ってよい。なお、ソート順はモートン符号順に限らず、他の順序が用いられてもよい。
次に、三次元データ復号装置は、階層L+1の低周波成分を含む符号化係数と階層Lの高周波成分を含む符号化係数に逆Haar変換を適用することで、階層Lにおいてモートン符号順で隣り合う三次元点の属性情報を復元する。例えば、三次元データ復号装置は、2×2行列の逆Haar変換を用いてもよい。復元された階層Lの属性情報は下位階層L-1の入力値として用いられる。
三次元データ復号装置は、このような階層処理を繰返し、最下層の属性情報が全て復号されたら処理を終了する。なお、逆Haar変換適用時に階層L-1にて隣り合う2つの三次元点として1つの三次元点のみが存在する場合は、三次元データ復号装置は、存在する1つの三次元点の属性値に階層Lの符号化成分の値を代入してもよい。これにより、三次元データ復号装置は、入力された属性情報の全ての値にHaar変換を適用し、符号化効率を向上したビットストリームを正しく復号できる。
属性情報がN次元である場合、三次元データ復号装置は、次元毎に独立に逆Haar変換を適用し、それぞれの符号化係数を復号してもよい。例えば、属性情報が色情報(RGB又はYUV等)である場合、三次元データ復号装置は、成分毎の符号化係数に逆Haar変換を適用し、それぞれの属性値を復号する。
三次元データ復号装置は、階層Lmax、L+1、…、階層Lの順に逆Haar変換を適用してもよい。また、図47に示すw0及びw1は、各三次元点に割当てられる重みである。例えば、三次元データ復号装置は、逆Haar変換を適用する隣り合う2つの三次元点間の距離情報等に基づき重みを算出してもよい。例えば、三次元データ符号化装置は、距離が近いほど重みを大きくすることで符号化効率を向上したビットストリームを復号してもよい。
図47に示す例では、逆量子化後の符号化係数は、Ta1、Ta5、Tb1、Tb3、Tc1及びd0であり、復号値としてa0、a1、a2、a3、a4及びa5が得られる。
図48は、属性情報(attribute_data)のシンタックス例を示す図である。属性情報(attribute_data)は、ゼロ連続数(ZeroCnt)と、属性次元数(attribute_dimension)と、符号化係数(value[j][i])とを含む。
ゼロ連続数(ZeroCnt)は、量子化後の符号化係数において値0が連続する回数を示す。なお、三次元データ符号化装置は、ZeroCntを二値化したうえで算術符号化してもよい。
また、図48に示すように、三次元データ符号化装置は、符号化係数が属する階層L(layerL)が、予め定められた閾値TH_layer以上かどうかを判定し、判定結果によってビットストリームに付加する情報を切り替えてもよい。例えば、三次元データ符号化装置は、判定結果が真であれば属性情報の全ての符号化係数をビットストリームに付加する。また、三次元データ符号化装置は、判定結果が偽であれば一部の符号化係数をビットストリームに付加してもよい。
具体的には、三次元データ符号化装置は、判定結果が真であれば、色情報のRGB又はYUVの三次元情報の符号化結果をビットストリームに付加する。判定結果が偽であれば、三次元データ符号化装置は、色情報のうち、G又はYなどの一部の情報をビットストリームに付加し、それ以外の成分をビットストリームに付加しなくてもよい。このように、三次元データ符号化装置は、視覚的に劣化が目立ちにくい高周波成分を示す符号化係数を含む階層(TH_layerより小さい階層)の符号化係数の一部をビットストリームに付加しないことで、符号化効率を向上できる。
属性次元数(attribute_dimension)は、属性情報の次元数を示す。例えば、属性情報が三次元点の色情報(RGB又はYUVなど)である場合、色情報は三次元であるため属性次元数は値3に設定される。属性情報が反射率である場合、反射率は一次元であるため属性次元数は値1に設定される。なお、属性次元数はビットストリームの属性情報のヘッダ等に付加されてもよい。
符号化係数(value[j][i])は、i番目の三次元点のj次元番目の属性情報の量子化後の符号化係数を示す。例えば属性情報が色情報の場合、value[99][1]は100番目の三次元点の二次元番目(例えばG値)の符号化係数を示す。また、属性情報が反射率情報の場合、value[119][0]は120番目の三次元点の1次元番目(例えば反射率)の符号化係数を示す。
なお、以下の条件を満たす場合、三次元データ符号化装置は、value[j][i]から値1を減算し、得られた値をエントロピー符号化してもよい。この場合、三次元データ復号装置は、エントロピー復号後のvalue[j][i]に値1を加算することで符号化係数を復元する。
上記の条件は、(1)attribute_dimension=1の場合、又は、(2)attribute_dimensionが1以上で、かつ全ての次元の値が等しい場合である。例えば、属性情報が反射率の場合はattribute_dimension=1であるため、三次元データ符号化装置は符号化係数から値1を減算してvalueを算出し、算出したvalueを符号かする。三次元データ復号装置は復号後のvalueに値1を加算して符号化係数を算出する。
より具体的には、例えば、反射率の符号化係数が10の場合、三次元データ符号化装置は、符号化係数の値10から値1を減算した値9を符号化する。三次元データ復号装置は、復号した値9に値1を加算して符号化係数の値10を算出する。
また、属性情報が色の場合はattribute_dimension=3であるため、三次元データ符号化装置は、例えば、R、G、Bの各成分の量子化後の符号化係数が同じ場合は、各符号化係数から値1を減算し、得られた値を符号化する。三次元データ復号装置は、復号後の値に値1を加算する。より具体的には、例えば、R、G、Bの符号化係数=(1、1、1)の場合は、三次元データ符号化装置は、(0、0、0)を符号化する。三次元データ復号装置は、(0、0、0)の各成分に1を加算して(1、1、1)を算出する。また、R、G、Bの符号化係数=(2、1、2)の場合は、三次元データ符号化装置は、(2、1、2)をそのまま符号化する。三次元データ復号装置は、復号した(2、1、2)をそのまま符号化係数として用いる。
このように、ZeroCntを設けることで、valueとして全ての次元が0であるパターンは生成されないので、valueの値から1を減じた値を符号化できる。よって、符号化効率を向上できる。
また、図48に示すvalue[0][i]は、i番目の三次元点の一次元番目の属性情報の量子化後の符号化係数を示す。図48に示すように符号化係数の属する階層L(layerL)が閾値TH_layerより小さければ、一次元番目の属性情報をビットストリームに付加する(二次元番目以降の属性情報をビットストリーム付加しない)ことで符号量を削減してもよい。
三次元データ符号化装置は、attribute_dimensionの値によってZeroCntの値の算出方法を切替えてもよい。例えば、三次元データ符号化装置は、attribute_dimension=3の場合は、全ての成分(次元)の符号化係数の値が0となる回数をカウントしてもよい。図49は、この場合の符号化係数とZeroCntの例を示す図である。例えば、図49に示す色情報の場合、三次元データ符号化装置は、R、G、B成分が全て0である符号化係数が連続する数をカウントし、カウントした数をZeroCntとしてビットストリームに付加する。これにより、成分毎にZeroCntを符号化する必要がなくなり、オーバヘッドを削減できる。よって、符号化効率を改善できる。なお、三次元データ符号化装置は、attribute_dimensionが2以上の場合でも次元毎にZeroCntを算出し、算出したZeroCntをビットストリームに付加してもよい。
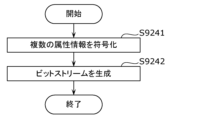
図50は、本実施の形態に係る三次元データ符号化処理のフローチャートである。まず、三次元データ符号化装置は、位置情報(geometry)を符号化する(S6601)。例えば、三次元データ符号化装置は、8分木表現を用いて符号化を行う。
次に、三次元データ符号化装置は、属性情報を変換する(S6602)。例えば、三次元データ符号化装置は、位置情報の符号化後に、量子化等によって三次元点の位置が変化した場合に、変化後の三次元点に元の三次元点の属性情報を再割当てする。なお、三次元データ符号化装置は、位置の変化量に応じて属性情報の値を補間して再割当てを行ってもよい。例えば、三次元データ符号化装置は、変化後の三次元位置に近い変化前の三次元点をN個検出し、N個の三次元点の属性情報の値を、変化後の三次元位置から各N個の三次元までの距離に基づいて重み付け平均し、得られた値を変化後の三次元点の属性情報の値に設定する。また、三次元データ符号化装置は、量子化等によって2個以上の三次元点が同一の三次元位置に変化した場合は、その変化後の属性情報の値として、変化前の2個以上の三次元点における属性情報の平均値を割当ててもよい。
次に、三次元データ符号化装置は、属性情報を符号化する(S6603)。例えば、三次元データ符号化装置は、複数の属性情報を符号化する場合は、複数の属性情報を順に符号化してもよい。例えば、三次元データ符号化装置は、属性情報として、色と反射率を符号化する場合は、色の符号化結果の後に反射率の符号化結果を付加したビットストリームを生成する。なお、ビットストリームに付加される属性情報の複数の符号化結果はどのような順番でもよい。
また、三次元データ符号化装置は、ビットストリーム内の各属性情報の符号化データの開始場所を示す情報をヘッダ等に付加してもよい。これにより、三次元データ復号装置は、復号が必要な属性情報を選択的に復号できるので、復号が不必要な属性情報の復号処理を省略できる。よって、三次元データ復号装置の処理量を削減できる。また、三次元データ符号化装置は、複数の属性情報を並列に符号化し、符号化結果を1つのビットストリームに統合してもよい。これにより、三次元データ符号化装置は、高速に複数の属性情報を符号化できる。
図51は、属性情報符号化処理(S6603)のフローチャートである。まず、三次元データ符号化装置は、Haar変換により属性情報から符号化係数を生成する(S6611)。次に、三次元データ符号化装置は、符号化係数に量子化を適用する(S6612)。次に、三次元データ符号化装置は、量子化後の符号化係数を符号化することで符号化属性情報(ビットストリーム)を生成する(S6613)。
また、三次元データ符号化装置は、量子化後の符号化係数に逆量子化を適用する(S6614)。次に、三次元データ復号装置は、逆量子化後の符号化係数に逆Haar変換を適用することで属性情報を復号する(S6615)。例えば、復号された属性情報は、後続の符号化において参照される。
図52は、符号化係数符号化処理(S6613)のフローチャートである。まず、三次元データ符号化装置は、符号化係数を符号付き整数値から符号なし整数値に変換する(S6621)。例えば、三次元データ符号化装置は、符号付き整数値を下記のように符号なし整数値に変換する。符号付き整数値Ta1qが0より小さい場合、符号なし整数値は、-1-(2×Ta1q)に設定される。符号付き整数値Ta1qが0以上である場合、符号なし整数値は、2×Ta1qに設定される。なお、符号化係数が負の値にならない場合には、三次元データ符号化装置は、符号化係数をそのまま符号なし整数値として符号化してもよい。
全ての符号化係数を処理済みでない場合(S6622でNo)、三次元データ符号化装置は、処理対象の符号化係数の値がゼロであるかを判定する(S6623)。処理対象の符号化係数の値がゼロである場合(S6623でYes)、三次元データ符号化装置は、ZeroCntを1インクリメントし(S6624)、ステップS6622に戻る。
処理対象の符号化係数の値がゼロでない場合(S6623でNo)、三次元データ符号化装置は、ZeroCntを符号化し、ZeroCntを0にリセットする(S6625)。また、三次元データ符号化装置は、処理対象の符号化係数を算術符号化し(S6626)、ステップS6622に戻る。例えば、三次元データ符号化装置は、二値算術符号化を行う。また、三次元データ符号化装置は、符号化係数から値1を減算し、得られた値を符号化してもよい。
また、ステップS6623~S6626の処理が符号化係数毎に繰り返し行われる。また、全ての符号化係数を処理済みである場合(S6622でYes)、三次元データ符号化装置は、処理を終了する。
図53は、本実施の形態に係る三次元データ復号処理のフローチャートである。まず、三次元データ復号装置は、ビットストリームから位置情報(geometry)を復号する(S6631)。例えば、三次元データ復号装置は、8分木表現を用いて復号を行う。
次に、三次元データ復号装置は、ビットストリームから属性情報を復号する(S6632)。例えば、三次元データ復号装置は、複数の属性情報を復号する場合は、複数の属性情報を順に復号してもよい。例えば、三次元データ復号装置は、属性情報として、色と反射率を復号する場合は、ビットストリームに付加されている順に従い、色の符号化結果、及び反射率の符号化結果を復号する。例えば、ビットストリームにおいて、色の符号化結果の後に、反射率の符号化結果が付加されている場合、三次元データ復号装置は、色の符号化結果を復号し、その後に反射率の符号化結果を復号する。なお、三次元データ復号装置は、ビットストリームに付加される属性情報の符号化結果をどのような順番で復号してもよい。
また、三次元データ復号装置は、ビットストリーム内の各属性情報の符号化データの開始場所を示す情報をヘッダ等を復号することで取得してもよい。これにより、三次元データ復号装置は、復号が必要な属性情報を選択的に復号できるので、復号が不必要な属性情報の復号処理を省略できる。よって、三次元データ復号装置の処理量を削減できる。また、三次元データ復号装置は、複数の属性情報を並列に復号し、復号結果を1つの三次元点群に統合してもよい。これにより、三次元データ復号装置は、高速に複数の属性情報を復号できる。
図54は、属性情報復号処理(S6632)のフローチャートである。まず、三次元データ復号装置は、ビットストリームから符号化係数を復号する(S6641)。次に、三次元データ復号装置は、符号化係数に逆量子化を適用する(S6642)。次に、三次元データ復号装置は、逆量子化後の符号化係数に逆Haar変換を適用することで属性情報を復号する(S6643)。
図55は、符号化係数復号処理(S6641)のフローチャートである。まず、三次元データ復号装置は、ビットストリームからZeroCntを復号する(S6651)。全ての符号化係数を処理済みでない場合(S6652でNo)、三次元データ復号装置は、ZeroCntが0より大きいかを判定する(S6653)。
ZeroCntがゼロより大きい場合(S6653でYes)、三次元データ復号装置は、処理対象の符号化係数を0に設定する(S6654)。次に、三次元データ復号装置は、ZeroCntを1減算し(S6655)、ステップS6652に戻る。
ZeroCntがゼロである場合(S6653でNo)、三次元データ復号装置は、処理対象の符号化係数を復号する(S6656)。例えば、三次元データ復号装置は、二値算術復号を用いる。また、三次元データ復号装置は、復号した符号化係数に値1を加算してもよい。
次に、三次元データ復号装置は、ZeroCntを復号し、得られた値をZeroCntに設定し(S6657)、ステップS6652に戻る。
また、ステップS6653~S6657の処理が符号化係数毎に繰り返し行われる。また、全ての符号化係数を処理済みである場合(S6652でYes)、三次元データ符号化装置は、復号した複数の符号化係数を符号なし整数値から符号付き整数値に変換する(S6658)。例えば、三次元データ復号装置は、復号した符号化係数は下記のように符号なし整数値から符号付き整数値に変換してもよい。復号された符号なし整数値Ta1uのLSB(least significant bit)が1である場合、符号付き整数値Ta1qは、-((Ta1u+1)>>1)に設定される。復号された符号なし整数値Ta1uのLSBが1でない場合(0である場合)、符号付き整数値Ta1qは、(Ta1u>>1)に設定される。なお、符号化係数が負の値にならない場合には、三次元データ復号装置は、復号した符号化係数をそのまま符号付き整数値として用いてもよい。
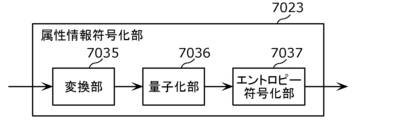
図56は、三次元データ符号化装置に含まれる属性情報符号化部6600のブロック図である。属性情報符号化部6600は、ソート部6601と、Haar変換部6602と、量子化部6603と、逆量子化部6604と、逆Haar変換部6605と、メモリ6606と、算術符号化部6607とを備える。
ソート部6601は、三次元点の位置情報を用いてモートン符号を生成し、複数の三次元点をモートン符号順にソートする。Haar変換部6602は、属性情報にHaar変換を適用することで符号化係数を生成する。量子化部6603は、属性情報の符号化係数を量子化する。
逆量子化部6604は、量子化後の符号化係数を逆量子化する。逆Haar変換部6605は、符号化係数に逆Haar変換を適用する。メモリ6606は、復号済みの複数の三次元点の属性情報の値を記憶する。例えば、メモリ6606に記憶される復号済みの三次元点の属性情報は、符号化されていない三次元点の予測等に利用されてもよい。
算術符号化部6607は、量子化後の符号化係数からZeroCntを算出し、ZeroCntを算術符号化する。また、算術符号化部6607は、量子化後の非ゼロの符号化係数を算術符号化する。算術符号化部6607は、符号化係数を算術符号化前に二値化してもよい。また、算術符号化部6607は、各種ヘッダ情報を生成及び符号化してもよい。
図57は、三次元データ復号装置に含まれる属性情報復号部6610のブロック図である。属性情報復号部6610は、算術復号部6611と、逆量子化部6612と、逆Haar変換部6613と、メモリ6614とを備える。
算術復号部6611は、ビットストリームに含まれるZeroCntと符号化係数を算術復号する。なお、算術復号部6611は、各種ヘッダ情報を復号してもよい。
逆量子化部6612は、算術復号した符号化係数を逆量子化する。逆Haar変換部6613は、逆量子化後の符号化係数に逆Haar変換を適用する。メモリ6614は、復号済みの複数の三次元点の属性情報の値を記憶する。例えば、メモリ6614に記憶される復号済みの三次元点の属性情報は、復号されていない三次元点の予測に利用されてもよい。
なお、上記実施の形態では、符号化順として下位層から上位層の順に三次元点を符号化する例を示したが、必ずしもこれに限らない。例えば、Haar変換後の符号化係数を上位層から下位層の順にスキャンする方法が用いられてもよい。なお、この場合も、三次元データ符号化装置は、値0の連続回数をZeroCntとして符号化してもよい。
また、三次元データ符号化装置は、本実施の形態で述べたZeroCntを用いた符号化方法を用いるか否かを、WLD、SPC又はボリューム単位で切替えてもよい。この場合、三次元データ符号化装置は、ZeroCntを用いた符号化方法を適用したか否かを示す情報をヘッダ情報に付加してもよい。これにより、三次元データ復号装置は、適切に復号を行える。切替え方法の例として、例えば、三次元データ符号化装置は、1個のボリュームに対して値0の符号化係数の発生回数をカウントする。三次元データ符号化装置は、カウント値が予め定められた閾値を越えた場合は、次のボリュームにZeroCntを用いた方法を適用し、カウント値が閾値以下の場合、次のボリュームにZeroCntを用いた方法を適用しない。これにより、三次元データ符号化装置は、符号化対象の三次元点の特徴に応じて適切にZeroCntを用いた符号化方法を適用するか否かを切り替えることができるので、符号化効率を向上できる。
以下、本実施の形態の別の手法(変形例)について説明する。三次元データ符号化装置は、量子化後の符号化係数(符号なし整数値)を、ある順番に応じてスキャンし、符号化する。例えば、三次元データ符号化装置は、下位層に含まれる三次元点から順に上位層に向かって複数の三次元点を符号化する。
図58は、図43に示す属性情報に対して、この手法を用いた場合の第1符号列及び第2符号列の例を示す図である。この例の場合、三次元データ符号化装置は、下位層Lに含まれるTa1qからTa5q、Tb1q、Tb3q、Tc1q、d0qの順で複数の符号化係数を符号化する。ここで、下位層ほど、量子化後の符号化係数が0になりやすい傾向がある。この要因として、以下のことなどが上げられる。
下位層Lの符号化係数は、上位層より高い周波数成分を示すため、符号化対象の三次元点によっては0になりやすい傾向がある。また、上述した重要度等に応じた量子化スケールの切り替えにより、下位層ほど量子化スケールが大きくなり、量子化後の符号化係数が0になりやすい。
このように、下位層になるほど、量子化後の符号化係数が0になりやすく、値0が連続して第1符号列に発生しやすい。三次元データ符号化装置は、第1符号列で値0が発生した回数をカウントし、連続した値0の代わりに、値0が連続して発生した回数(ZeroCnt)を符号化する。これにより、量子化後の符号化係数の値0が連続した場合に、多数の0を符号化するよりも0の連続回数を符号化することで符号化効率を向上できる。
また、三次元データ符号化装置は、値0の発生回数の総数を示す情報を符号化してもよい。これにより、ZeroCntを符号化するオーバヘッドを削減でき、符号化効率を向上できる。
例えば、三次元データ符号化装置は、値0の符号化係数の総数をTotalZeroCntとして符号化する。これにより、図58に示す例では、第2符号列に含まれる2個目のZeroCnt(値1)を三次元データ復号装置が復号した時点で、復号済みのZeroCntの総数がN+1(=TotalZeroCnt)となる。よって、三次元データ復号装置は、これ以降は0が発生しないことを把握できる。そのため、三次元データ符号化装置は、以降、value毎にZeroCntを符号化する必要がなくなり、符号量を削減できる。
また、三次元データ符号化装置は、TotalZeroCntをエントロピー符号化してもよい。例えば、三次元データ符号化装置は、符号化三次元点の総数Tのトランケットユーナリ符号でTotalZeroCntの値を二値化し、二値化後の各ビットを算術符号化する。この際、三次元データ符号化装置は、ビット毎に異なる符号化テーブルを用いることで符号化効率を向上してもよい。例えば、三次元データ符号化装置は、1ビット目には符号化テーブル1を用い、2ビット目には符号化テーブル2を用い、それ以降のビットには符号化テーブル3を用いる。このように、三次元データ符号化装置は、ビット毎に符号化テーブルを切り替えることで符号化効率を向上できる。
また、三次元データ符号化装置は、TotalZeroCntを指数ゴロムで二値化したうえで算術符号化してもよい。これにより、TotalZeroCntの値が大きくなりやすい場合に、トランケットユーナリ符号による二値化算術符号化よりも効率を向上できる。なお、三次元データ符号化装置は、トランケットユーナリ符号を用いるか指数ゴロムを用いるかを切り替えるためのフラグをヘッダに付加してもよい。これにより、三次元データ符号化装置は、最適な二値化方法を選択することで符号化効率を向上できる。また、三次元データ復号装置はヘッダに含まれるフラグを参照して二値化方法を切り替えて、ビットストリームを正しく復号できる。
図59は、本変形例における属性情報(attribute_data)のシンタックス例を示す図である。図59に示す属性情報(attribute_data)は、図48に示す属性情報に対して、さらに、ゼロ総数(TotalZeroCnt)を含む。なお、その他の情報については図48と同様である。ゼロ総数(TotalZeroCnt)は、量子化後の値0の符号化係数の総数を示す。
また、三次元データ符号化装置は、attribute_dimensionの値によってTotalZereCnt及びZeroCntの値の算出方法を切替えてもよい。例えば、三次元データ符号化装置は、attribute_dimension=3の場合は、全ての成分(次元)の符号化係数の値が0となる回数をカウントしてもよい。図60は、この場合の符号化係数、ZeroCnt及びTotalZeroCntの例を示す図である。例えば、図60に示す色情報の場合、三次元データ符号化装置は、R、G、B成分が全て0である符号化係数が連続する数をカウントし、カウントした数をTotalZeroCnt及びZeroCntとしてビットストリームに付加する。これにより、成分毎にTotalZeroCnt及びZeroCntを符号化する必要がなくなり、オーバヘッドを削減できる。よって、符号化効率を改善できる。なお、三次元データ符号化装置は、attribute_dimensionが2以上の場合でも次元毎にTotalZeoCnt及びZeroCntを算出し、算出したTotalZeoCnt及びZeroCntをビットストリームに付加してもよい。
図61は、本変形例における符号化係数符号化処理(S6613)のフローチャートである。まず、三次元データ符号化装置は、符号化係数を符号付き整数値から符号なし整数値に変換する(S6661)。次に、三次元データ符号化装置は、TotalZeroCntを符号化する(S6662)。
全ての符号化係数を処理済みでない場合(S6663でNo)、三次元データ符号化装置は、処理対象の符号化係数の値がゼロであるかを判定する(S6664)。処理対象の符号化係数の値がゼロである場合(S6664でYes)、三次元データ符号化装置は、ZeroCntを1インクリメントし(S6665)、ステップS6663に戻る。
処理対象の符号化係数の値がゼロでない場合(S6664でNo)、三次元データ符号化装置は、TotalZeroCntが0より大きいかを判定する(S6666)。TotalZeroCntが0より大きい場合(S6666でYes)、三次元データ符号化装置は、ZeroCntを符号化し、TotalZeroCntをTotalZeroCnt-ZeroCntに設定する(S6667)。
ステップS6667の後、又は、TotalZeroCntが0である場合(S6666でNo)、三次元データ符号化装置は、符号化係数を符号化し、ZeroCntを0にリセットし(S6668)、ステップS6663に戻る。例えば、三次元データ符号化装置は、二値算術符号化を行う。また、三次元データ符号化装置は、符号化係数から値1を減算し、得られた値を符号化してもよい。
また、ステップS6664~S6668の処理が符号化係数毎に繰り返し行われる。また、全ての符号化係数を処理済みである場合(S6663でYes)、三次元データ符号化装置は、処理を終了する。
図62は、本変形例における符号化係数復号処理(S6641)のフローチャートである。まず、三次元データ復号装置は、ビットストリームからTotalZeroCntを復号する(S6671)。次に、三次元データ復号装置は、ビットストリームからZeroCntを復号し、TotalZeroCntをTotalZeroCnt-ZeroCntに設定する(S6672)。
全ての符号化係数を処理済みでない場合(S6673でNo)、三次元データ符号化装置は、ZeroCntが0より大きいかを判定する(S6674)。
ZeroCntがゼロより大きい場合(S6674でYes)、三次元データ復号装置は、処理対象の符号化係数を0に設定する(S6675)。次に、三次元データ復号装置は、ZeroCntを1減算し(S6676)、ステップS6673に戻る。
ZeroCntがゼロである場合(S6674でNo)、三次元データ復号装置は、処理対象の符号化係数を復号する(S6677)。例えば、三次元データ復号装置は二値算術復号を用いる。また、三次元データ復号装置は、復号した符号化係数に値1を加算してもよい。
次に、三次元データ復号装置は、TotalZeroCntが0より大きいかを判定する(S6678)。TotalZeroCntが0より大きい場合(S6678でYes)、三次元データ復号装置は、ZeroCntを復号し、得られた値をZeroCntに設定し、TotalZeroCntをTotalZeroCnt-ZeroCntに設定し(S6679)、ステップS6673に戻る。また、TotalZeroCntが0である場合(S6678でNo)、三次元データ復号装置は、ステップS6673に戻る。
また、ステップS6674~S6679の処理が符号化係数毎に繰り返し行われる。また、全ての符号化係数を処理済みである場合(S6673でYes)、三次元データ符号化装置は、復号した符号化係数を符号なし整数値から符号付き整数値に変換する(S6680)。
図63は、属性情報(attribute_data)の別のシンタックス例を示す図である。図63に示す属性情報(attribute_data)は、図48に示す符号化係数(value[j][i])の代わりに、value[j][i]_greater_zero_flagと、value[j][i]_greater_one_flagと、value[j][i]とを含む。なお、その他の情報については図48と同様である。
value[j][i]_greater_zero_flagは、符号化係数(value[j][i])の値が0より大きいか(1以上であるか)否かを示す。言い換えると、value[j][i]_greater_zero_flagは、符号化係数(value[j][i])の値が0であるか否かを示す。
例えば、符号化係数の値が0より大きい場合、value[j][i]_greater_zero_flagは値1に設定され、符号化係数の値が0の場合、value[j][i]_greater_zero_flagは値0に設定される。三次元データ符号化装置は、value[j][i]_greater_zero_flagの値が0の場合、value[j][i]をビットストリームに付加しなくてもよい。この場合、三次元データ復号装置は、value[j][i]の値が値0であるとして判断してもよい。これにより、符号量を削減できる。
value[j][i]_greater_one_flagは、符号化係数(value[j][i])の値が1より大きいか(2以上であるか)否かを示す。言い換えると、value[j][i]_greater_one_flagは、符号化係数(value[j][i])の値が1であるか否かを示す。
例えば、符号化係数の値が1より大きい場合、value[j][i]_greater_one_flagは値1に設定される。そうでない場合(符号化係数の値が1以下の場合)、value[j][i]_greater_one_flagは値0に設定される。三次元データ符号化装置は、value[j][i]_greater_one_flagの値が0の場合、value[j][i]をビットストリームに付加しなくてもよい。この場合、三次元データ復号装置は、三次元データ符号化装置は、value[j][i]の値が値1であると判断してもよい。
value[j][i]は、i番目の三次元点のj次元番目の属性情報の量子化後の符号化係数を示す。例えば属性情報が色情報の場合、value[99][1]は100番目の三次元点の二次元番目(例えばG値)の符号化係数を示す。また、属性情報が反射率情報の場合、value[119][0]は120番目の三次元点の1次元番目(例えば反射率)の符号化係数を示す。
三次元データ符号化装置は、value[j][i]_greater_zero_flag=1、value[j][i]_greater_one_flag=1の場合にvalue[j][i]をビットストリームに付加してもよい。また、三次元データ符号化装置は、value[j][i]から2を減算した値をビットストリームに付加してもよい。この場合、三次元データ復号装置は、復号したvalue[j][i]に値2を加算することで符号化係数を算出する。
三次元データ符号化装置は、value[j][i]_greater_zero_flag、及びvalue[j][i]_greater_one_flagをエントロピー符号化してもよい。例えば二値算術符号化及び二値算術復号が用いられてもよい。これにより符号化効率を向上できる。
(実施の形態9)
高圧縮を実現するために、PCC(Point Cloud Compression)データに含まれる属性情報は、Lifting、RAHT(Region Adaptive Hierarchical Transform)又はその他の変換手法等の複数の手法を用いて変換される。ここで、Liftingとは、LoD(Level of
Detail)を用いた変換方法の一つである。
重要な信号情報は低周波成分に含まれる傾向があるため、高周波成分を量子化することで符号量が削減される。つまり、変換処理は強いエネルギー圧縮特性を有する。また、量子化パラメータの大きさに応じて、量子化により精度が失われる。
図64は、本実施の形態に係る三次元データ符号化装置の構成を示すブロック図である。この三次元データ符号化装置は、減算部7001と、変換部7002と、変換行列保持部7003と、量子化部7004と、量子化制御部7005と、エントロピー符号化部7006とを備える。
減算部7001は、入力データと参照データとの差分である係数値を算出する。例えば、入力データとは点群データに含まれる属性情報であり、参照データとの属性情報の予測値である。
変換部7002は係数値に変換処理を行う。例えば、この変換処理は、複数の属性情報をLoDに分類する処理である。なお、この変換処理はHaar変換等であってもよい。変換行列保持部7003は、変換部7002による変換処理に用いられる変換行列を保持する。例えば、この変換行列はHaar変換行列である。なお、ここでは、三次元データ符号化装置は、LoDを用いた変換処理と、Haar変換等の変換処理との両方を行う機能を有する例を示すが、いずれか一方の機能を有してもよい。また、三次元データ符号化装置は、これらの2種類の変換処理を選択的に用いてもよい。また、三次元データ符号化装置は、所定の処理単位毎に、使用する変換処理を切り替えてもよい。
量子化部7004は、係数値を量子化することで量子化値を生成する。量子化制御部7005は、量子化部7004が量子化に用いる量子化パラメータを制御する。例えば、量子化制御部7005は、符号化の階層構造に合わせて量子化パラメータ(または、量子化ステップ)を切替えてもよい。これにより、階層構造毎に適切な量子化パラメータを選択することで階層毎に発生符号量を制御できる。また、量子化制御部7005は、例えば主観画質に影響が少ない周波数成分を含むある階層以下の量子化パラメータを最大値に設定し、その階層以下の量子化係数を0にする。これにより、主観画質の劣化を抑制しつつ、発生符号量削減できる。また、量子化制御部7005は、主観画質と発生符号量をより細かく制御できる。ここで、階層とは、LoD又はRAHT(Haar変換)における階層(木構造における深さ)である。
エントロピー符号化部7006は、量子化係数をエントロピー符号化(例えば算術符号化)することでビットストリームを生成する。また、エントロピー符号化部7006は、量子化制御部7005で設定された階層毎の量子化パラメータを符号化する。
図65は、本実施の形態に係る三次元データ復号装置の構成を示すブロック図である。この三次元データ復号装置は、エントロピー復号部7011と、逆量子化部7012と、量子化制御部7013と、逆変換部7014と、変換行列保持部7015と、加算部7016とを備える。
エントロピー復号部7011は、ビットストリームから量子化係数と、階層毎の量子化パラメータとを復号する。逆量子化部7012は、量子化係数を逆量子化することで係数値を生成する。量子化制御部7013は、エントロピー復号部7011で得られた階層号の量子化パラメータに基づき、逆量子化部7012が逆量子化に用いる量子化パラメータを制御する。
逆変換部7014は、係数値を逆変換する。例えば、逆変換部7014は、係数値を逆Haar変換する。変換行列保持部7015は、逆変換部7014による逆変換処理に用いられる変換行列を保持する。例えば、この変換行列は逆Haar変換行列である。
加算部7016は、係数値に参照データを加算することで出力データを生成する。例えば、出力データとは点群データに含まれる属性情報であり、参照データとの属性情報の予測値である。
次に、階層毎の量子化パラメータの設定の例を説明する。Predicting/Lifting等の属性情報の符号化において、LoDの階層に基づいて異なる量子化パラメータを適用する。例えば、低層の量子化パラメータを小さくし、低層の精度を上げる。これにより、高層の予測精度を向上できる。また、高層に対しては量子化パラメータを大きくすることでデータ量を削減できる。このように、ユーザの使用方針に応じて、LoD毎に個別に量子化ツリー値(Qt)を設定できる。ここで、量子化ツリー値とは、例えば、量子化パラメータである。
図66は、LoDの設定例を示す図である。例えば、図66に示すようにLoD0~LoD2に対して独立したQt0~Qt2が設定される。
また、RAHTを用いた属性情報の符号化では、木構造の深さに基づいて異なる量子化パラメータを適用する。例えば、低層の量子化パラメータを小さくし、低層の精度を上げる。これにより、高層の予測精度を向上できる。また、高層に対しては量子化パラメータを大きくすることでデータ量を削減できる。このように、ユーザの使用方針に応じて、木構造の深さ毎に個別に量子化ツリー値(Qt)を設定できる。
図67は、RAHTの階層構造(木構造)の例を示す図である。例えば、図67に示すように木構造の深さ毎に独立したQt0~Qt2が設定される。
以下、本実施の形態に係る三次元データ符号化装置の構成を説明する。図68は、本実施の形態に係る三次元データ符号化装置7020の構成を示すブロック図である。三次元データ符号化装置7020は、点群データ(ポイントクラウド)を符号化することで符号化データ(符号化ストリーム)を生成する。この三次元データ符号化装置7020は、分割部7021と、複数の位置情報符号化部7022と、複数の属性情報符号化部7023と、付加情報符号化部7024と、多重化部7025とを含む。
分割部7021は、点群データを分割することで複数の分割データを生成する。具体的には、分割部7021は、点群データの空間を複数のサブ空間に分割することで複数の分割データを生成する。ここでサブ空間とは、タイル及びスライスの一方、又はタイル及びスライスの組み合わせである。より具体的には、点群データは、位置情報、属性情報(色又は反射率等)、及び付加情報を含む。分割部7021は、位置情報を分割することで複数の分割位置情報を生成し、属性情報を分割することで複数の分割属性情報を生成する。また、分割部7021は、分割に関する付加情報を生成する。
例えば、分割部7021は、まず、点群をタイルに分割する。次に、分割部7021は、得られたタイルを、さらにスライスに分割する。
複数の位置情報符号化部7022は、複数の分割位置情報を符号化することで複数の符号化位置情報を生成する。例えば、位置情報符号化部7022は、8分木等のN分木構造を用いて分割位置情報を符号化する。具体的には、8分木では、対象空間が8個のノード(サブ空間)に分割され、各ノードに点群が含まれるか否かを示す8ビットの情報(オキュパンシー符号)が生成される。また、点群が含まれるノードは、さらに、8個のノードに分割され、当該8個のノードの各々に点群が含まれるか否かを示す8ビットの情報が生成される。この処理が、予め定められた階層又はノードに含まれる点群の数の閾値以下になるまで繰り返される。例えば、複数の位置情報符号化部7022は、複数の分割位置情報を並列処理する。
属性情報符号化部7023は、位置情報符号化部7022で生成された構成情報を用いて属性情報を符号化することで符号化データである符号化属性情報を生成する。例えば、属性情報符号化部7023は、位置情報符号化部7022で生成された8分木構造に基づき、処理対象の対象点(対象ノード)の符号化において参照する参照点(参照ノード)を決定する。例えば、属性情報符号化部7023は、周辺ノード又は隣接ノードのうち、8分木における親ノードが対象ノードと同一のノードを参照する。なお、参照関係の決定方法はこれに限らない。
また、位置情報又は属性情報の符号化処理は、量子化処理、予測処理、及び算術符号化処理のうち少なくとも一つを含んでもよい。この場合、参照とは、属性情報の予測値の算出に参照ノードを用いること、又は、符号化のパラメータの決定に参照ノードの状態(例えば、参照ノードに点群が含まれる否かを示す占有情報)を用いること、である。例えば、符号化のパラメータとは、量子化処理における量子化パラメータ、又は算術符号化におけるコンテキスト等である。
付加情報符号化部7024は、点群データに含まれる付加情報と、分割部7021で分割時に生成された、データ分割に関する付加情報とを符号化することで符号化付加情報を生成する。
多重化部7025は、複数の符号化位置情報、複数の符号化属性情報及び符号化付加情報を多重化することで符号化データ(符号化ストリーム)を生成し、生成した符号化データを送出する。また、符号化付加情報は復号時に使用される。
図69は、分割部7021のブロック図である。分割部7021は、タイル分割部7031と、スライス分割部7032とを含む。
タイル分割部7031は、位置情報(Position(Geometry))をタイルに分割することで複数のタイル位置情報を生成する。また、タイル分割部7031は、属性情報(Attribute)をタイルに分割することで複数のタイル属性情報を生成する。また、タイル分割部7031は、タイル分割に係る情報、及びタイル分割において生成された情報を含むタイル付加情報(Tile MetaData)を出力する。
スライス分割部7032は、複数のタイル位置情報をスライスに分割することで複数の分割位置情報(複数のスライス位置情報)を生成する。また、スライス分割部7032は、複数のタイル属性情報をスライスに分割することで複数の分割属性情報(複数のスライス属性情報)を生成する。また、スライス分割部7032は、スライス分割に係る情報、及びスライス分割において生成された情報を含むスライス付加情報(Slice MetaData)を出力する。
また、タイル分割部7031及びスライス分割部7032は、生成した付加情報に基づき量子化ツリー値(量子化パラメータ)を決定する。
図70は、属性情報符号化部7023のブロック図である。属性情報符号化部7023は、変換部7035と、量子化部7036と、エントロピー符号化部7037とを含む。
変換部7035は、分割属性情報をLoD等の階層に分類し、分割属性情報と予測値との差分を算出することで係数値(差分値)を生成する。なお、変換部7035は、分割属性情報にHaar変換を行うことで係数値を生成してもよい。
量子化部7036は、係数値を量子化することで量子化値を生成する。具体的には、量子化部7036は、量子化パラメータに基づく量子化ステップで係数を除算する。エントロピー符号化部7037は、量子化値をエントロピー符号化することで符号化属性情報を生成する。
以下、本実施の形態に係る三次元データ復号装置の構成を説明する。図71は、三次元データ復号装置7040の構成を示すブロック図である。三次元データ復号装置7040は、点群データが符号化されることで生成された符号化データ(符号化ストリーム)を復号することで点群データを復元する。この三次元データ復号装置7040は、逆多重化部7041と、複数の位置情報復号部7042と、複数の属性情報復号部7043と、付加情報復号部7044と、結合部7045とを含む。
逆多重化部7041は、符号化データ(符号化ストリーム)を逆多重化することで複数の符号化位置情報、複数の符号化属性情報及び符号化付加情報を生成する。
複数の位置情報復号部7042は、複数の符号化位置情報を復号することで複数の分割位置情報を生成する。例えば、複数の位置情報復号部7042は、複数の符号化位置情報を並列処理する。
複数の属性情報復号部7043は、複数の符号化属性情報を復号することで複数の分割属性情報を生成する。例えば、複数の属性情報復号部7043は、複数の符号化属性情報を並列処理する。
複数の付加情報復号部7044は、符号化付加情報を復号することで付加情報を生成する。
結合部7045は、付加情報を用いて複数の分割位置情報を結合することで位置情報を生成する。結合部7045は、付加情報を用いて複数の分割属性情報を結合することで属性情報を生成する。
図72は、属性情報復号部7043のブロック図である。属性情報復号部7043は、エントロピー復号部7051と、逆量子化部7052と、逆変換部7053とを含む。エントロピー復号部7051は、符号化属性情報をエントロピー復号することで量子化値を生成する。逆量子化部7052は、量子化値を逆量子化することで係数値を生成する。具体的には、ビットストリームから取得された量子化ツリー値(量子化パラメータ)に基づく量子化ステップを係数値に乗算する。逆変換部7053は、係数値を逆変換することで分割属性情報を生成する。ここで、逆変換とは、例えば、係数値に予測値を加算する処理である。または、逆変換とは、逆Haar変換である。
以下、量子化パラメータの決定方法の例を説明する。図73は、タイル及びスライス分割における量子化パラメータの設定例を示す図である。
量子化パラメータの値が小さいと、元の情報が維持されやすい。例えば、量子化パラメータの既定値は1である。例えば、PCCデータのタイルを用いた符号化処理では、主要道路のタイルの量子化パラメータは、データ品質を維持するために小さい値に設定される。一方、周囲領域のタイルの量子化パラメータは、大きい値に設定される。これにより、周辺領域のデータ品質は低下するが、符号化効率を向上できる。
同様に、PCCデータのスライスを用いた符号化処理では、歩道、木、及び建物は、自己位置推定及びマッピングにおいて重要であり、歩道、木、及び建物のスライスの量子化パラメータは、小さい値に設定される。一方、移動体及びその他のデータの重要性が低いので、移動体及びその他のデータのスライスの量子化パラメータは高く設定される。
また、後述するΔQP(DeltaQP)を用いる場合には、三次元データ符号化装置は、主要道路など、重要なエリアに属する三次元点の符号化において、量子化パラメータを小さくするためにΔQPの値に負の値を設定して量子化誤差が小さくなるように符号化を行ってもよい。これにより、重要なエリアに属する三次元点の復号後の属性値を符号化前の値に近づけることができる。また、三次元データ符号化装置は、周辺領域など、重要でないエリアに属する三次元点の符号化時には、量子化パラメータを大きくするためにΔQPの値に正の値を設定して情報量を削減してもよい。これにより、重要なエリアの情報量をキープしつつ、全体の符号量を削減できる。
以下、階層毎の量子化パラメータを示す情報の例を説明する。三次元点の属性情報を量子化して符号化する場合に、フレーム、スライス又はタイル等に対する量子化パラメータQPbaseに加え、より細かい単位で量子化パラメータを制御する仕組みを導入する。例えば、三次元データ符号化装置は、属性情報をLoDを用いて符号化する場合、LoD毎にDelta_Layerを設け、LoD毎にQPbaseの値にDelta_Layerを加算することで量子化パラメータの値を変えながら符号化を行う。また、三次元データ符号化装置は、符号化に用いたDelta_Layerをビットストリームのヘッダ等に付加する。これにより、三次元データ符号化装置は、例えば目標符号量と発生符号量とに応じてLoD毎の量子化パラメータを変えながら三次元点の属性情報を符号化できるので、最終的に目標符号量に近い符号量のビットストリームを生成できる。また、三次元データ復号装置は、ヘッダに含まれるQPbase及びDelta_Layerを復号して三次元データ符号化装置が使用した量子化パラメータを生成することで、ビットストリームを適切に復号できる。
図74は、全ての三次元点の属性情報を量子化パラメータQPbaseを用いて符号化する場合の例を示す図である。図75は、LoDの階層毎に量子化パラメータを切替えて符号化を行う場合の例を示す図である。図75に示す例では、先頭のLoDの量子化パラメータは、QPbaseに、先頭のLoDのDelta_Layerを加算することで算出される。2番目以降のLoDでは、処理対象のLoDの量子化パラメータは、直前のLoDの量子化パラメータに処理対象のLoDのDelta_Layerを加算することで算出される。例えば、LoD3の先頭の量子化パラメータQP3は、QP3=QP2+Delta_Layer[3]で算出される。
なお、各LoDのDelta_Layer[i]はQPbaseからの差分値を示してもよい。つまり、i番目のLoDiの量子化パラメータQPiは、QPi=QPbase+Delta_Layer[i]で表される。例えば、QP1=QPbase+Delta_Layer[1]で表され、QP2=QPbase+Delta_Layer[2]で表される。
図76は、属性情報ヘッダ(Attribute header information)のシンタックス例を示す図である。ここで属性情報ヘッダとは、例えば、フレーム、スライス又はタイル単位のヘッダであり、属性情報のヘッダである。図76に示すように、属性情報ヘッダは、QPbase(基準量子化パラメータ)と、NumLayer(階層数)と、Delta_Layer[i](差分量子化パラメータ)とを含む。
QPbaseは、フレーム、スライス又はタイル等において基準となる量子化パラメータの値を示す。NumLayerは、LoD又はRAHTの階層数を示す。言い換えると、NumLayerは、属性情報ヘッダに含まれるDelta_Layer[i]の数を示す。
Delta_Layer[i]は、階層iのΔQPの値を示す。ここでΔQPは、階層i-1の量子化パラメータから階層iの量子化パラメータを減算した値である。なお、ΔQPは、QPbaseから階層iの量子化パラメータを減算した値であってもよい。また、ΔQPは、正又は負の値をとり得る。なお、Delta_Layer[0]をヘッダに付加しなくてもよい。この場合、階層0の量子化パラメータはQPbaseに等しい。これによりヘッダ符号量を削減できる。
図77は、属性情報ヘッダ(Attribute header information)の別のシンタックス例を示す図である。図77に示す属性情報ヘッダは、図76に示す属性情報ヘッダに対して、さらに、delta_Layer_present_flagを含む。
delta_Layer_present_flagは、Delta_Layerがビットストリームに含まれるか否かを示すフラグである。例えば、値1は、Delta_Layerがビットストリームに含まれることを示し、値0は、Delta_Layerがビットストリームに含まれないことを示す。delta_Layer_present_flagが0の場合、三次元データ復号装置は、例えば、Delta_Layerを0として以降の復号処理を行う。
なお、ここでは、QPbase及びDelta_Layerにより量子化パラメータが示される例を述べたが、QPbase及びDelta_Layerにより量子化ステップが示されてもよい。量子化ステップは、量子化パラメータから、予め定められた式又はテーブル等を用いて算出される。三次元データ符号化装置は、量子化処理において係数値を量子化ステップで除算する。三次元データ復号装置は、逆量子化処理において量子化値に量子化ステップを乗算することで係数値を復元する。
次に、更に細かい単位で量子化パラメータを制御する例を説明する。図78は、LoDよりも細かい単位で量子化パラメータを制御する例を示す図である。
例えば、三次元データ符号化装置は、属性情報をLoDを用いて符号化する場合、LoD階層毎のDelta_Layerに加え、ADelta_QPと、ADelta_QPを加算する三次元点の位置情報を表すNumPointADeltaとを定義する。三次元データ符号化装置は、Delta_Layer、ADelta_QP及びNumPointADeltaに基づき量子化パラメータの値を変更しながら符号化を行う。
また、三次元データ符号化装置は、符号化に用いたADelta及びNumPointADeltaをビットストリームのヘッダ等に付加してもよい。これにより、三次元データ符号化装置は、例えば、目標符号量と発生符号量とに応じて三次元点毎の量子化パラメータを変更しながら複数の三次元点の属性情報を符号化できる。これにより、三次元データ符号化装置は、最終的に目標符号量に近い符号量のビットストリームを生成できる。また、三次元データ復号装置は、ヘッダに含まれるQPbase、Delta_Layer、及びADeltaを復号して三次元データ符号化装置が使用した量子化パラメータを生成することで、ビットストリームを適切に復号できる。
例えば、図78に示すように、N0番目の属性情報の量子化値QP4は、QP4=QP3+ADelta_QP[0]で算出される。
また、図78に示す符号化/復号順とは逆の符号化/復号順が用いられてもよい。例えばLoD3、LoD2、LoD1、LoD0の順に符号化/復号が行われてもよい。
図79は、図78に示す例を用いる場合の属性情報ヘッダ(Attribute header information)のシンタックス例を示す図である。図79に示す属性情報ヘッダは、図76に示す属性情報ヘッダに対して、さらに、NumADeltaと、NumPointADelta[i]と、ADelta_QP[i]とを含む。
NumADeltaは、ビットストリームに含まれるADelta_QPの数を示す。NumPointADelta[i]は、ADelta_QP[i]を適用する三次元点Aの識別番号を示す。例えば、NumPointADelta[i]は、符号化/復号順で先頭の三次元点から三次元点Aまでの三次元点の個数を示す。また、NumPointADelta[i]は、三次元点Aが属するLoD内の最初の三次元点から三次元点Aまでの三次元点の個数を示してもよい。
または、NumPointADelta[i]は、NumPointADelta[i-1]で示される三次元点の識別番号と、三次元点Aの識別番号との差分値を示してもよい。これにより、NumPointADelta[i]の値を小さくできるので、符号量を削減できる。
ADelta_QP[i]は、NumPointADelta[i]で示される三次元点のΔQPの値を示す。つまり、ADelta_QP[i]は、NumPointADelta[i]で示される三次元点の量子化パラメータと、当該三次元点の直前の三次元点の量子化パラメータとの差分を示す。
図80は、図78に示す例を用いる場合の属性情報ヘッダ(Attribute header information)の別のシンタックス例を示す図である。図80に示す属性情報ヘッダは、図79に示す属性情報ヘッダに対して、さらに、delta_Layer_present_flagと、additional_delta_QP_present_flagとを含み、NumADeltaの代わりにNumADelta_minus1を含む。
delta_Layer_present_flagは、図77を用いて既に説明したものと同様である。
additional_delta_QP_present_flagは、ADelta_QPがビットストリームに含まれるか否かを示すフラグである。例えば、値1は、ADelta_QPがビットストリームに含まれることを示し、値0は、ADelta_QPがビットストリームに含まれないことを示す。additional_delta_QP_present_flagが0の場合、三次元データ復号装置は、例えば、ADelta_QPを0として以降の復号処理を行う。
NumADelta_minus1は、ビットストリームに含まれるADelta_QPの数-1を示す。このように、ADelta_QPの数から1を減算した値をヘッダに付加することでヘッダの符号量を削減できる。例えば、三次元データ復号装置は、NumADelta=NumADelta_minus1+1を算出する。ADelta_QP[i]は、i番目のADelta_QPの値を示す。なお、ADelta_QP[i]は、正の値だけでなく、負の値も設定可能であってもよい。
図81は、本実施の形態に係る三次元データ符号化処理のフローチャートである。まず、三次元データ符号化装置は、位置情報(geometry)を符号化する(S7001)。例えば、三次元データ符号化装置は、8分木表現を用いて符号化を行う。
次に、三次元データ符号化装置は、属性情報を変換する(S7002)。例えば、三次元データ符号化装置は、位置情報の符号化後に、量子化等によって三次元点の位置が変化した場合に、変化後の三次元点に元の三次元点の属性情報を再割当てする。なお、三次元データ符号化装置は、位置の変化量に応じて属性情報の値を補間して再割当てを行ってもよい。例えば、三次元データ符号化装置は、変化後の三次元位置に近い変化前の三次元点をN個検出し、N個の三次元点の属性情報の値を、変化後の三次元位置から各N個の三次元までの距離に基づいて重み付け平均し、得られた値を変化後の三次元点の属性情報の値に決定する。また、三次元データ符号化装置は、量子化等によって2個以上の三次元点が同一の三次元位置に変化した場合は、その変化後の属性情報の値として、変化前の2個以上の三次元点における属性情報の平均値を割当ててもよい。
次に、三次元データ符号化装置は、属性情報を符号化する(S7003)。例えば、三次元データ符号化装置は、複数の属性情報を符号化する場合は、複数の属性情報を順に符号化してもよい。例えば、三次元データ符号化装置は、属性情報として、色と反射率を符号化する場合は、色の符号化結果の後に反射率の符号化結果を付加したビットストリームを生成する。なお、ビットストリームに付加される属性情報の複数の符号化結果はどのような順番でもよい。
また、三次元データ符号化装置は、ビットストリーム内の各属性情報の符号化データの開始場所を示す情報をヘッダ等に付加してもよい。これにより、三次元データ復号装置は、復号が必要な属性情報を選択的に復号できるので、復号が不必要な属性情報の復号処理を省略できる。よって、三次元データ復号装置の処理量を削減できる。また、三次元データ符号化装置は、複数の属性情報を並列に符号化し、符号化結果を1つのビットストリームに統合してもよい。これにより、三次元データ符号化装置は、高速に複数の属性情報を符号化できる。
図82は、属性情報符号化処理(S7003)のフローチャートである。まず、三次元データ符号化装置は、LoDを設定する(S7011)。つまり、三次元データ符号化装置は、各三次元点を複数のLoDのいずれかに割り当てる。
次に、三次元データ符号化装置は、LoD単位のループを開始する(S7012)。つまり、三次元データ符号化装置は、LoD毎にステップS7013~S7021の処理を繰り返し行う。
次に、三次元データ符号化装置は、三次元点単位のループを開始する(S7013)。つまり、三次元データ符号化装置は、三次元点毎にステップS7014~S7020の処理を繰り返し行う。
まず、三次元データ符号化装置は、処理対象の対象三次元点の予測値の算出に用いる、対象三次元点の周囲に存在する三次元点である複数の周囲点を探索する(S7014)。次に、三次元データ符号化装置は、複数の周囲点の属性情報の値の重み付け平均を算出し、得られた値を予測値Pに設定する(S7015)。次に、三次元データ符号化装置は、対象三次元点の属性情報と予測値との差分である予測残差を算出する(S7016)。次に、三次元データ符号化装置は、予測残差を量子化することで量子化値を算出する(S7017)。次に、三次元データ符号化装置は、量子化値を算術符号化する(S7018)。次に、三次元データ符号化装置は、ΔQPを決定する(S7019)。ここで決定されたΔQPは、後続の予測残差の量子化に用いられる量子化パラメータの決定に用いられる。
また、三次元データ符号化装置は、量子化値を逆量子化することで逆量子化値を算出する(S7020)。次に、三次元データ符号化装置は、逆量子化値に予測値を加算することで復号値を生成する(S7021)。次に、三次元データ符号化装置は、三次元点単位のループを終了する(S7022)。また、三次元データ符号化装置は、LoD単位のループを終了する(S7023)。
図83は、ΔQP決定処理(S7019)のフローチャートである。まず、三次元データ符号化装置は、次の符号化対象の対象三次元点Aが属する階層iと符号化順Nとを算出する(S7031)。階層iは、例えばLoD階層、又はRAHTの階層を表す。
次に、三次元データ符号化装置は、累計符号量に発生符号量を加算する(S7032)。ここで、累計符号量とは、対象三次元点の1フレーム分、1スライス分、又は1タイル分の累積符号量である。なお、累計符号量は、複数フレーム、複数スライス、又は複数タイルの符号量を加算した累積符号量であってもよい。また、属性情報の累積符号量が用いられてもよいし、位置情報と属性情報の両方を加算した累積符号量が用いられてもよい。
次に、三次元データ符号化装置は、累計符号量が目標符号量×TH1より多いか否かを判定する(S7033)。ここで、目標符号量とは、対象三次元点の1フレーム分、1スライス分、又は1タイル分の目標符号量である。なお、目標符号量は、複数フレーム、複数スライス、又は複数タイルを加算した目標符号量であってもよい。また、属性情報の目標符号量が用いられてもよいし、位置情報と属性情報の両方を加算した目標符号量が用いられてもよい。
累計符号量が目標符号量×TH1以下の場合(S7033でNo)、三次元データ符号化装置は、累計符号量が目標符号量×TH2より多いか否かを判定する(S7036)。
ここで、閾値TH1及びTH2として、例えば0.0から1.0までの値が設定される。また、TH1>TH2である。例えば、三次元データ符号化装置は、累積符号量が目標符号量×TH1の値を超えた場合(S7033でYes)、早急に符号量を抑制する必要があると判断し、次の三次元点Nの量子化パラメータを大きくするためにADelta_QPを値αに設定する。また、三次元データ符号化装置は、NumPointADeltaを値Nに設定し、jを1インクリメントする(S7034)。次に、三次元データ符号化装置は、ADelta_QP=αとNumPointADelta=Nとをヘッダに付加する(S7035)。なお、値αは固定値であってもよいし、可変値であってもよい。例えば、三次元データ符号化装置は、累積符号量と目標符号量×TH1の差分の大きさによってαの値を決定してもよい。例えば、三次元データ符号化装置は、累積符号量と目標符号量×TH1の差分が大きいほどαの値を大きく設定する。これにより、三次元データ符号化装置は、累積符号量が目標符号量を超えないように量子化パラメータを制御できる。
また、累積符号量が目標符号量×TH2の値を超えた場合(S7036でYes)、三次元データ符号化装置は、対象三次元点Aが属する階層i又は次の階層i+1の量子化パラメータを大きくするためにDelta_Layerを値βに設定する(S7037)。例えば、三次元データ符号化装置は、対象三次元点Aが階層iの先頭であれば、階層iのDelta_Layer[i]を値βに設定し、対象三次元点Aが階層iの先頭以外であれば、階層i+1のDelta_Layer[i+1]を値βに設定する。
また、三次元データ符号化装置は、階層i又は階層i+1のDelta_Layer=βをヘッダに付加する(S7038)。なお、値βは固定値であってもよいし、可変値であってもよい。例えば、三次元データ符号化装置は、累積符号量と目標符号量×TH2の差分の大きさによってβの値を決定してもよい。例えば、三次元データ符号化装置は、累積符号量と目標符号量×TH2の差分が大きいほどβの値を大きく設定する。これにより、三次元データ符号化装置は、累積符号量が目標符号量を超えないように量子化パラメータを制御できる。
また、三次元データ符号化装置は、累積符号量が目標符号量を超えた場合、又は、超えそうな場合、量子化パラメータが、規格等でサポートされている値の最大値になるようにADelta_QP又はDelta_Layerの値を設定してもよい。これにより、三次元データ符号化装置は、三次元点A以降、又は階層i以降の量子化係数を0にすることで発生符号量の増加を抑制し、累積符号量が目標符号量を超えないように制御できる。
また、三次元データ符号化装置は、累積符号量が目標符号量×TH3より小さければ、発生符号量が増加するように量子化パラメータを下げてもよい。例えば、三次元データ符号化装置は、Delta_Layer又はAdelta_QPの値に累積符号量と目標符号量の差分に応じて負の値を設定することで量子化パラメータを下げてもよい。これにより、三次元データ符号化装置は、目標符号量に近いビットストリームを生成できる。
図84は、本実施の形態に係る三次元データ復号処理のフローチャートである。まず、三次元データ復号装置は、ビットストリームから位置情報(geometry)を復号する(S7005)。例えば、三次元データ復号装置は、8分木表現を用いて復号を行う。
次に、三次元データ復号装置は、ビットストリームから属性情報を復号する(S7006)。例えば、三次元データ復号装置は、複数の属性情報を復号する場合は、複数の属性情報を順に復号してもよい。例えば、三次元データ復号装置は、属性情報として、色と反射率を復号する場合は、ビットストリームに付加されている順に従い、色の符号化結果、及び反射率の符号化結果を復号する。例えば、ビットストリームにおいて、色の符号化結果の後に、反射率の符号化結果が付加されている場合、三次元データ復号装置は、色の符号化結果を復号し、その後に反射率の符号化結果を復号する。なお、三次元データ復号装置は、ビットストリームに付加される属性情報の符号化結果をどのような順番で復号してもよい。
また、三次元データ復号装置は、ビットストリーム内の各属性情報の符号化データの開始場所を示す情報をヘッダ等を復号することで取得してもよい。これにより、三次元データ復号装置は、復号が必要な属性情報を選択的に復号できるので、復号が不必要な属性情報の復号処理を省略できる。よって、三次元データ復号装置の処理量を削減できる。また、三次元データ復号装置は、複数の属性情報を並列に復号し、復号結果を1つの三次元点群に統合してもよい。これにより、三次元データ復号装置は、高速に複数の属性情報を復号できる。
図85は、属性情報復号処理(S7006)のフローチャートである。まず、三次元データ復号装置は、LoDを設定する(S7041)。つまり、三次元データ復号装置は、復号された位置情報を有する複数の三次元点の各々を複数のLoDのいずれかに割り当てる。例えば、この割り当て方法は、三次元データ符号化装置で用いられた割り当て方法と同じ方法である。
次に、三次元データ復号装置は、ビットストリームからΔQPを復号する(S7042)。具体的には、三次元データ符号化装置は、ビットストリームのヘッダから、Delta_Layer、ADelta_QP及びNumPointADeltaを復号する。
次に、三次元データ復号装置は、LoD単位のループを開始する(S7043)。つまり、三次元データ復号装置は、LoD毎にステップS7044~S7050の処理を繰り返し行う。
次に、三次元データ復号装置は、三次元点単位のループを開始する(S7044)。つまり、三次元データ復号装置は、三次元点毎にステップS7045~S7049の処理を繰り返し行う。
まず、三次元データ復号装置は、処理対象の対象三次元点の予測値の算出に用いる、対象三次元点の周囲に存在する三次元点である複数の周囲点を探索する(S7045)。次に、三次元データ復号装置は、複数の周囲点の属性情報の値の重み付け平均を算出し、得られた値を予測値Pに設定する(S7046)。なお、これらの処理は三次元データ符号化装置における処理と同様である。
次に、三次元データ復号装置は、ビットストリームから量子化値を算術復号する(S7047)。また、三次元データ復号装置は、復号した量子化値を逆量子化することで逆量子化値を算出する(S7048)。この逆量子化では、ステップS7042で得られたΔQPを用いて算出された量子化パラメータが用いられる。
次に、三次元データ復号装置は、逆量子化値に予測値を加算することで復号値を生成する(S7049)。次に、三次元データ復号装置は、三次元点単位のループを終了する(S7050)。また、三次元データ復号装置は、LoD単位のループを終了する(S7051)。
図86は、属性情報符号化部7023のブロック図である。属性情報符号化部7023は、LoD設定部7061と、探索部7062と、予測部7063と、減算部7064と、量子化部7065と、逆量子化部7066と、再構成部7067と、メモリ7068と、ΔQP算出部7070とを備える。
LoD設定部7061は、三次元点の位置情報を用いてLoDを生成する。探索部7062は、LoD生成結果と三次元点間の距離情報とを用いて各三次元点の近隣三次元点を探索する。予測部7063は、対象三次元点の属性情報の予測値を生成する。また、予測部7063は、0~M-1の複数の予測モードに予測値を割り当て、複数の予測モードから使用する予測モードを選択する。
減算部7064は、属性情報から予測値を減算することで予測残差を生成する。量子化部7065は、属性情報の予測残差を量子化する。逆量子化部7066は、量子化後の予測残差を逆量子化する。再構成部7067は、予測値と逆量子化後の予測残差とを加算することで復号値を生成する。メモリ7068は、復号済みの各三次元点の属性情報の値(復号値)を記憶する。メモリ7068に記憶される復号済みの三次元点の属性情報は、予測部7063による、符号化されていない三次元点の予測に利用される。
算術符号化部7069は、量子化後の予測残差からZeroCntを算出し、ZeroCntを算術符号化する。また、算術符号化部7069は、量子化後の非ゼロの予測残差を算術符号化する。算術符号化部7069は、予測残差を算術符号化前に二値化してもよい。また、算術符号化部7069は、各種ヘッダ情報を生成及び符号化してもよい。また、算術符号化部7069は、予測部7063が符号化に使用した予測モードを示す予測モード情報(PredMode)を算術符号化してビットストリームに付加してもよい。
ΔQP算出部7070は、算術符号化部7069で得られた発生符号量と、予め定められた目標符号量とからDelta_Layer、ADelta_QP及びNumPointADeltaの値を決定する。決定されたDelta_Layer、ADelta_QP及びNumPointADeltaに基づく量子化パラメータを用いて、量子化部7065による量子化が行われる。また、算術符号化部7069は、Delta_Layer、ADelta_QP及びNumPointADeltaを算術符号化してビットストリームに付加する。
図87は、属性情報復号部7043のブロック図である。属性情報復号部7043は、算術復号部7071と、LoD設定部7072と、探索部7073と、予測部7074と、逆量子化部7075と、再構成部7076と、メモリ7077とを備える。
算術復号部7071は、ビットストリームに含まれるZeroCntと予測残差とを算術復号する。また、算術復号部7071は、各種ヘッダ情報を復号する。また、算術復号部7071は、ビットストリームから予測モード情報(PredMode)を算術復号し、得られた予測モード情報を予測部7074に出力する。また、算術復号部7071は、ビットストリームのヘッダからDelta_Layer、ADelta_QP及びNumPointADeltaを復号する。
LoD設定部7072は、復号された三次元点の位置情報を用いてLoDを生成する。探索部7073は、LoD生成結果と三次元点間の距離情報を用いて各三次元点の近隣三次元点を探索する。
予測部7074は、復号対象の対象三次元点の属性情報の予測値を生成する。逆量子化部7075は、算術復号された予測残差を逆量子化する。具体的には、逆量子化部7075は、復号されたDelta_Layer、ADelta_QP及びNumPointADeltaに基づく量子化パラメータを用いて逆量子化を行う。
再構成部7076は、予測値と逆量子化後の予測残差とを加算することで復号値を生成する。メモリ7077は、復号済みの各三次元点の属性情報の値(復号値)を記憶する。メモリ7077に記憶される復号済みの三次元点の属性情報は、予測部7074による、復号されていない三次元点の予測に利用される。
以下、LoD階層の代わりにRAHTの階層を用いる場合の例を説明する。図88は、RAHTを用いた属性情報の符号化時に、更に細かい単位で量子化パラメータを制御する例を示す図である。例えば、三次元データ符号化装置は、属性情報をRAHTを用いて符号化する場合、RAHTの階層毎のDelta_Layerに加え、ADelta_QPと、ADelta_QPを加算する三次元点の位置情報を表すNumPointADeltaとを定義する。三次元データ符号化装置は、Delta_Layer、ADelta_QP及びNumPointADeltaに基づき量子化パラメータの値を変更しながら符号化を行う。
また、三次元データ符号化装置は、符号化に用いたADelta及びNumPointADeltaをビットストリームのヘッダ等に付加してもよい。これにより、三次元データ符号化装置は、例えば、目標符号量と発生符号量とに応じて三次元点毎の量子化パラメータを変更しながら三次元点の属性情報を符号化できる。これにより、三次元データ符号化装置は、最終的に目標符号量に近い符号量のビットストリームを生成できる。また、三次元データ復号装置は、ヘッダに含まれるQPbase、Delta_Layer及びADeltaを復号して三次元データ符号化装置が使用した量子化パラメータを生成することで、ビットストリームを適切に復号できる。
例えばN0番目の属性情報の量子化値QP4は、QP4=QP3+ADelta_QP[0]で算出される。また、QP4=QPbase+ADelta_QP[0]のように各ADelta_QP[i]はQPbaseからの差分値であってもよい。
図89は、図88に示す例を用いる場合の属性情報ヘッダ(Attribute header information)のシンタックス例を示す図である。なお、図89に示す属性情報ヘッダには、図79に示す属性情報ヘッダと基本的には同様であり、LoD階層がRAHTの階層に変更されている点が異なる。
NumADeltaは、ビットストリームに含まれるADelta_QPの数を示す。NumPointADelta[i]は、ADelta_QP[i]を適用する三次元点Aの識別番号を示す。例えば、例えば、NumPointADelta[i]は、符号化/復号順で先頭の三次元点から三次元点Aまでの三次元点の個数を示す。また、NumPointADelta[i]は、三次元点Aが属する階層内の最初の三次元点から三次元点Aまでの三次元点の個数を示してもよい。
または、NumPointADelta[i]は、NumPointADelta[i-1]で示される三次元点の識別番号と、三次元点Aの識別番号との差分値を示してもよい。これにより、NumPointADelta[i]の値を小さく設定できるので、符号量を削減できる。
図90は、図88に示す例を用いる場合の属性情報ヘッダ(Attribute header information)の別のシンタックス例を示す図である。なお、図90に示す属性情報ヘッダには、図80に示す属性情報ヘッダと基本的には同様であり、LoD階層がRAHTの階層に変更されている点が異なる。
additional_delta_QP_present_flagは、ADelta_QPがビットストリームに含まれるか否かを示すフラグである。例えば、値1は、ADelta_QPがビットストリームに含まれることを示し、値0は、ADelta_QPがビットストリームに含まれないことを示す。additional_delta_QP_present_flagが0の場合、三次元データ復号装置は、例えば、ADelta_QPを0として以降の復号処理を行う。
NumADelta_minus1は、ビットストリームに含まれるADelta_QPの数-1を示す。このように、ADelta_QPの数から1を減算した値をヘッダに付加することでヘッダの符号量を削減できる。例えば、三次元データ復号装置は、NumADelta=NumADelta_minus1+1を算出する。ADelta_QP[i]は、i番目のADelta_QPの値を示す。なお、ADelta_QP[i]は、正の値だけでなく、負の値も設定可能であってもよい。
図91は、RAHTを用いる場合の三次元データ符号化処理のフローチャートである。まず、三次元データ符号化装置は、位置情報(geometry)を符号化する(S7061)。例えば、三次元データ符号化装置は、8分木表現を用いて符号化を行う。
次に、三次元データ符号化装置は、属性情報を変換する(S7062)。例えば、三次元データ符号化装置は、位置情報の符号化後に、量子化等によって三次元点の位置が変化した場合に、変化後の三次元点に元の三次元点の属性情報を再割当てする。なお、三次元データ符号化装置は、位置の変化量に応じて属性情報の値を補間して再割当てを行ってもよい。例えば、三次元データ符号化装置は、変化後の三次元位置に近い変化前の三次元点をN個検出し、N個の三次元点の属性情報の値を、変化後の三次元位置から各N個の三次元までの距離に基づいて重み付け平均し、得られた値を変化後の三次元点の属性情報の値に設定する。また、三次元データ符号化装置は、量子化等によって2個以上の三次元点が同一の三次元位置に変化した場合は、その変化後の属性情報の値として、変化前の2個以上の三次元点における属性情報の平均値を割当ててもよい。
次に、三次元データ符号化装置は、属性情報を符号化する(S7063)。例えば、三次元データ符号化装置は、複数の属性情報を符号化する場合は、複数の属性情報を順に符号化してもよい。例えば、三次元データ符号化装置は、属性情報として、色と反射率を符号化する場合は、色の符号化結果の後に反射率の符号化結果を付加したビットストリームを生成する。なお、ビットストリームに付加される属性情報の複数の符号化結果はどのような順番でもよい。
また、三次元データ符号化装置は、ビットストリーム内の各属性情報の符号化データの開始場所を示す情報をヘッダ等に付加してもよい。これにより、三次元データ復号装置は、復号が必要な属性情報を選択的に復号できるので、復号が不必要な属性情報の復号処理を省略できる。よって、三次元データ復号装置の処理量を削減できる。また、三次元データ符号化装置は、複数の属性情報を並列に符号化し、符号化結果を1つのビットストリームに統合してもよい。これにより、三次元データ符号化装置は、高速に複数の属性情報を符号化できる。
図92は、属性情報符号化処理(S7063)のフローチャートである。まず、三次元データ符号化装置は、Haar変換により属性情報から符号化係数を生成する(S7071)。
次に、三次元データ符号化装置は、符号化係数に量子化を適用する(S7072)。次に、三次元データ符号化装置は、量子化後の符号化係数を符号化することで符号化属性情報(ビットストリーム)を生成する(S7073)。
次に、三次元データ復号装置は、ΔQPを決定する(S7074)。なお、ΔQPの決定方法は、LoD階層を用いる場合のステップS7019と同様である。また、決定されたΔQPは、後続の符号化係数の量子化に用いられる量子化パラメータの決定に用いられる。
また、三次元データ符号化装置は、量子化後の符号化係数に逆量子化を適用する(S7075)。次に、三次元データ復号装置は、逆量子化後の符号化係数に逆Haar変換を適用することで属性情報を復号する(S7076)。例えば、復号された属性情報は、後続の符号化において参照される。
図93は、RAHTを用いる場合の三次元データ復号処理のフローチャートである。まず、三次元データ復号装置は、ビットストリームから位置情報(geometry)を復号する(S7065)。例えば、三次元データ復号装置は、8分木表現を用いて復号を行う。
次に、三次元データ復号装置は、ビットストリームから属性情報を復号する(S7066)。例えば、三次元データ復号装置は、複数の属性情報を復号する場合は、複数の属性情報を順に復号してもよい。例えば、三次元データ復号装置は、属性情報として、色と反射率を復号する場合は、ビットストリームに付加されている順に従い、色の符号化結果、及び反射率の符号化結果を復号する。例えば、ビットストリームにおいて、色の符号化結果の後に、反射率の符号化結果が付加されている場合、三次元データ復号装置は、色の符号化結果を復号し、その後に反射率の符号化結果を復号する。なお、三次元データ復号装置は、ビットストリームに付加される属性情報の符号化結果をどのような順番で復号してもよい。
また、三次元データ復号装置は、ビットストリーム内の各属性情報の符号化データの開始場所を示す情報をヘッダ等を復号することで取得してもよい。これにより、三次元データ復号装置は、復号が必要な属性情報を選択的に復号できるので、復号が不必要な属性情報の復号処理を省略できる。よって、三次元データ復号装置の処理量を削減できる。また、三次元データ復号装置は、複数の属性情報を並列に復号し、復号結果を1つの三次元点群に統合してもよい。これにより、三次元データ復号装置は、高速に複数の属性情報を復号できる。
図94は、属性情報復号処理(S7066)のフローチャートである。まず、三次元データ復号装置は、ビットストリームから符号化係数を復号する(S7081)。次に、三次元データ復号装置は、ビットストリームからΔQPを復号する(S7082)。具体的には、三次元データ符号化装置は、ビットストリームのヘッダから、Delta_Layer、ADelta_QP及びNumPointADeltaを復号する。
次に、三次元データ復号装置は、符号化係数に逆量子化を適用する(S7083)。この逆量子化では、ステップS7082で得られたΔQPを用いて算出された量子化パラメータが用いられる。次に、三次元データ復号装置は、逆量子化後の符号化係数に逆Haar変換を適用することで属性情報を復号する(S7084)。
図95は、RAHTを用いる場合の属性情報符号化部7023のブロック図である。属性情報符号化部7023は、ソート部7081と、Haar変換部7082と、量子化部7083と、逆量子化部7084と、逆Haar変換部7085と、メモリ7086と、算術符号化部7087と、ΔQP算出部7088とを備える。
ソート部7081は、三次元点の位置情報を用いてモートン符号を生成し、複数の三次元点をモートン符号順にソートする。Haar変換部7082は、属性情報にHaar変換を適用することで符号化係数を生成する。量子化部7083は、属性情報の符号化係数を量子化する。
逆量子化部7084は、量子化後の符号化係数を逆量子化する。逆Haar変換部7085は、符号化係数に逆Haar変換を適用する。メモリ7086は、復号済みの複数の三次元点の属性情報の値を記憶する。例えば、メモリ7086に記憶される復号済みの三次元点の属性情報は、符号化されていない三次元点の予測等に利用されてもよい。
算術符号化部7087は、量子化後の符号化係数からZeroCntを算出し、ZeroCntを算術符号化する。また、算術符号化部7087は、量子化後の非ゼロの符号化係数を算術符号化する。算術符号化部7087は、符号化係数を算術符号化前に二値化してもよい。また、算術符号化部7087は、各種ヘッダ情報を生成及び符号化してもよい。
ΔQP算出部7088は、算術符号化部7087で得られた発生符号量と、予め定められた目標符号量とからDelta_Layer、ADelta_QP及びNumPointADeltaの値を決定する。決定されたDelta_Layer、ADelta_QP及びNumPointADeltaに基づく量子化パラメータを用いて、量子化部7083による量子化が行われる。また、算術符号化部7087は、Delta_Layer、ADelta_QP及びNumPointADeltaを算術符号化してビットストリームに付加する。
図96は、RAHTを用いる場合の属性情報復号部7043のブロック図である。属性情報復号部7043は、算術復号部7091と、逆量子化部7092と、逆Haar変換部7093と、メモリ7094とを備える。
算術復号部7091は、ビットストリームに含まれるZeroCntと符号化係数を算術復号する。なお、算術復号部7091は、各種ヘッダ情報を復号してもよい。また、算術復号部7091は、ビットストリームのヘッダからDelta_Layer、ADelta_QP及びNumPointADeltaを復号する。
逆量子化部7092は、算術復号した符号化係数を逆量子化する。具体的には、逆量子化部7092は、復号されたDelta_Layer、ADelta_QP及びNumPointADeltaに基づく量子化パラメータを用いて逆量子化を行う。
逆Haar変換部7093は、逆量子化後の符号化係数に逆Haar変換を適用する。メモリ7094は、復号済みの複数の三次元点の属性情報の値を記憶する。例えば、メモリ7094に記憶される復号済みの三次元点の属性情報は、復号されていない三次元点の予測に利用されてもよい。
以下、本実施の形態の変形例について説明する。三次元データ符号化装置は、三次元点の属性情報の量子化パラメータを、新たな属性情報として三次元点毎に符号化してもよい。
以下、この場合の三次元データ符号化装置のよる処理の例を説明する。三次元データ符号化装置は、図82に示すフローに従って、属性情報A(例えば色)を量子化パラメータを算出しながら符号化する。この際に、三次元データ符号化装置は、各三次元点の新たな属性値として、使用した量子化パラメータを符号化する。この場合、三次元データ符号化装置は、三次元点毎に量子化パラメータの値を変更しながら符号化を行ってもよい。例えば、三次元データ符号化装置は、累積符号量が目標符号量×TH1の値を超えた場合、発生符号量を抑制するために、量子化パラメータの値を大きく設定してもよい。また、三次元データ符号化装置は、累積符号量が目標符号量×TH3の値より小さい場合、発生符号量を増やすために、量子化パラメータの値を小さく設定してもよい。
三次元データ符号化装置は、属性情報Aを符号化後、各三次元点に割当てた量子化パラメータを新たな属性情報A’として符号化する。この際、三次元データ符号化装置は、量子化パラメータの情報量の欠落を防ぐためにロスレス(lossless)符号化を適用してもよい。また、三次元データ符号化装置は、ヘッダ等に符号化した属性情報が量子化パラメータであることを示す情報を付加してもよい。これにより、三次元データ復号装置は、三次元データ符号化装置が使用した量子化パラメータを適切に復号できる。
また、三次元データ符号化装置は、対象三次元の周囲のN個の三次元点を用いて属性情報の予測符号化を行う場合に、N=1として量子化パラメータを符号化してもよい。これにより計算量を削減できる。
次に、三次元データ復号装置による処理の例を説明する。まず、三次元データ復号装置は、ビットストリーム内の属性情報のうち、属性情報A’を復号し、属性情報Aの復号に用いる量子化パラメータを取得する。次に、三次元データ復号装置は、復号した量子化パラメータを用いて属性情報Aを復号する。
なお、三次元データ符号化装置は、上記量子化パラメータの代わりに、各三次元点の量子化パラメータの変化量であるΔQPを、新たな属性情報A’として符号化してもよい。また、三次元データ符号化装置は、ΔQPが正及び負の値をとる場合、下記のように符号付ΔQPを正の値に変換してから符号化してもよい。符号付ΔQP(deltaQP_s)が0未満の場合、符号無しΔQP(deltaQP_u)は、-1-(2×deltaQP_s)に設定される。符号付ΔQP(deltaQP_s)が0以上の場合、符号無しΔQP(deltaQP_u)は、2×deltaQP_sに設定される。
また、三次元データ符号化装置は、属性情報毎に符号化に用いた量子化パラメータを属性情報として符号化してもよい。例えば、三次元データ符号化装置は、色の属性情報Aの量子化パラメータを属性情報A’として符号化し、反射率の属性情報Bの量子化パラメータを属性情報B’として符号化してもよい。これにより、属性情報毎に量子化パラメータを切替えることができる。例えば優先度が高い属性情報の量子化パラメータを小さく設定し、優先度が低い属性情報の量子化パラメータを大きく設定することで、優先度が高い属性情報を保護しつつ、全体の符号量を削減できる。
また、三次元データ符号化装置は、三次元点の属性情報の予測残差を量子化して符号化する際に、delta_Layer_present_flag及びadditional_delta_QP_present_flagなどによって、Delta_Layer及びADelta_QPがヘッダに設定された場合は、三次元点の重要度を示すQW(Quantization weight)の値を適用しないようにしてもよい。例えば、QWが適用される場合には、QWが大きい(重要度が高い)ほど、量子化パラメータは小さく設定される。これにより、予測等の内部処理によって決定される重要度によって量子化を行うか、ユーザがヘッダで設定した値に応じて量子化を行うかを切替えることができるので、ユーザの用途に応じて両者を使い分けることができる。
また、三次元データ符号化装置は、QW(Quantization weight)の値を適用するか否かを示すフラグをヘッダに付加してもよい。これにより、Delta_Layer及びADelta_QPの値とQWとを組合わせて量子化を行うか否かを切替えることができるので、ユーザの用途に応じて両者を使い分けることができる。
また、三次元データ符号化装置は、RAHT等を用いて、三次元点の属性情報の変換係数を量子化して符号化する際に、delta_Layer_present_flag及びadditional_delta_QP_present_flagなどによって、Delta_Layer及びADelta_QPがヘッダに設定された場合は、QW(Quantization weight)の値を適用しないようにしてもよい。これにより、予測等の内部処理によって決定される重要度によって量子化を行うか、ユーザがヘッダで設定した値に応じて量子化を行うかを切替えることができるので、ユーザの用途に応じて両者を使い分けることができる。また、三次元データ符号化装置は、QW(Quantization weight)の値を適用するか否かを示すフラグをヘッダに付加してもよい。これにより、Delta_Layer及びADelta_QPの値とQWとを組合わせて量子化を行うか否かを切替えることができるので、ユーザの用途に応じて両者を使い分けることができる。
図97は、この場合の属性情報ヘッダ(Attribute header information)のシンタックス例を示す図である。図97に示す属性情報ヘッダは、図80に示す属性情報ヘッダに対して、さらに、default_delta_Layer_present_flagと、default_delta_Layer_indexと、default_additional_delta_QP_present_flagと、default_additional_delta_QP_indexとを含む。
default_delta_Layer_present_flagは、規格等で定義した初期設定のDelta_Layerの値を使用するか否かを示すフラグである。例えば、値1は、初期設定のDelta_Layerを使用すること示す。値0は、初期設定のDelta_Layerを使用しないことを示す。値0の場合、三次元データ復号装置は、例えば、Delta_Layerを0として以降の復号処理を行う。
default_delta_Layer_indexは、規格等で定義した1個以上の初期設定のDelta_Layerのうち、使用するDelta_Layerを識別するための情報である。例えば、default_delta_Layer_indexは、下記のように定義される。
default_delta_Layer_index=0の場合、全ての階層のDelta_Layerが1に設定される。つまり、階層が増える毎に量子化パラメータの値が1増加する。default_delta_Layer_index=1の場合、全ての階層のDelta_Layerが2に設定される。つまり、階層が増える毎に量子化パラメータの値が2増加する。
このように規格等で初期設定のDelta_Layerを定義することで、Delta_Layerの値をヘッダに付加せずに量子化パラメータを変更できるので、ヘッダの符号量を削減できる。
default_additional_delta_QP_present_flagは、規格等で定義した初期設定のADelta_QOの値を使用するか否かを示すフラグである。例えば、値1は、初期設定のADelta_QPを使用することを示す。値0は、初期設定のADelta_QPを使用しないことを示す。値0の場合、三次元データ復号装置は、例えば、ADelta_QPを0として以降の復号処理を行う。
default_additional_delta_QP_indexは、規格等で定義した1個以上の初期設定のADelta_QPのうち、使用するADelta_QPを識別するための情報である。例えば、default_additional_delta_QP_indexは、下記のように定義される。
default_additional_delta_QP_index=0の場合、三次元点数N個毎にADelta_QPが1に設定される。つまりN個の三次元点を符号化又は復号する毎に量子化パラメータの値が1増加する。なお、三次元データ符号化装置は、N個を示す情報を別途ヘッダに付加してもよい。
default_additional_delta_QP_index=1の場合、三次元点数N個毎にADelta_QPが2に設定される。つまりN個の三次元点を符号化又は復号する毎に量子化パラメータの値が2増加する。なお、三次元データ符号化装置は、N個を示す情報を別途ヘッダに付加してもよい。
このように規格等で初期設定のADelta_QPを定義することで、ADelta_QPの値をヘッダに付加せずに量子化パラメータを変更できるので、ヘッダの符号量を削減できる。
(実施の形態10)
実施の形態9で説明した、階層毎に量子化パラメータを割り当てる処理において、実施の形態10のような処理を行ってもよい。
本実施の形態では、量子化において適用するQP値を階層ごとに割り当てる例について説明する。図98は、ビットストリームの符号化のビットレートと時間との関係を示すグラフである。
図98に示されるように、三次元データ符号化装置は、閾値TH1と閾値TH2との間の予め許可されている所定の範囲で符号化のビットレートを制御することが望まれている。閾値TH1は、所定の範囲の最大の閾値(上限値)である。閾値TH1は、具体的には、バッファまたは伝送帯域幅が制限されているために超えることができないハードリミットである。閾値TH2は、所定の範囲の最小の閾値(下限値)である。閾値TH2は、具体的には、ビットレートおよび画質の一貫性を維持するために設定されるソフトリミットである。
符号化のビットレートを閾値TH1および閾値TH2の間の範囲に制御するためには、符号化中にQP値の調整が必要となる場合がある。ビットレートが所定の範囲に収まるようにQP値を調整する処理は、QP値の調整ツールを使うことで容易に実現することができる。QP値を調整する処理では、QP値が関連付けられる属性値を有する三次元点の数、および、符号化される属性値の複雑さに応じてQP値を調整することでビットレートを増減する。
ビットレートの変動は、符号化ツールが正しいQP値の設定に調整しようとする初期段階で発生し、符号化ストリームが安定すれば、ビットレートの変動は最終的に小さくなり、ビットレートは安定する。
図99は、三次元点群の階層構造と、各階層に属する三次元点の数とを示す図である。
図99の(a)に示すように、三次元点群に含まれる複数の三次元点は、階層1、階層2、階層3および階層4の4つの階層に分類される。
予測変換、リフティング変換、またはRAHTの性質により、LoD層毎または深度層毎の三次元点の数は、図99に示すように大きく異なる場合がある。例えば、最下層の階層4には、三次元点群の75%の数の三次元点が含まれ、他の階層1~3には、残りの25%の三次元点が含まれる。このため、階層4においてQP値を変更することは、階層1~3のいずれかでQP値を変更することよりも、ビットストリームのサイズまたはビットレートに大きな影響を与える。
この方法は、予測変換、リフティング変換、およびRAHTに適用できるだけでなく、複数の階層を用いて三次元点群を符号化する他の方法にも適用することができる。つまり、この方法は、適用される元のQP値(スライスまたは層)が三次元点群データのグループに適用可能であれば、上記で例示した階層毎の三次元点に適用することに限られない。また、1つの階層をさらに複数のサブ階層(SubLayer)に分割し、分割した複数のサブ階層に当該1つの階層に含まれる複数の三次元点を割り当てる(分類する)場合、複数のサブ階層毎にΔQP(DeltaQP)を割り当ててもよい。ここで、1つのサブ階層には、1以上の三次元点が割り当てられていればよい。
1つの階層をさらに複数のサブ階層に分割する方法は、必ずしも最下層の階層に適用されることに限らない。複数の階層のいずれの階層に適用されてもよい。
符号化においてビットストリームのビットレートを効果的に制御するためには、階層毎にQP値を調整して量子化を行う以外にも、さらに、細かくQP値を調整する調整ツールが必要である。そこで、NumPointADeltaを用いた手法では、ユーザは、特定のスライスの特定の階層の属性値の量を必要な値に設定することができる。
図100は、1階層の三次元点群を指定された三次元点数でサブ階層に分類する第1の例を示す図である。第1の例では、複数のサブ階層のそれぞれに含まれる三次元点の数が指定される。
サブ階層への分割には、さまざまな状況や符号化方法に合わせて、多くの方法で三次元点群を分割することが考えられる。例えば、各サブ階層の三次元点群の量が直接指定されることで、指定された三次元点群の量に応じて階層を複数のサブ階層に分割することが考えられる。
例えば、図100では、階層4には符号化対象の100個の三次元点が含まれており、階層4は、25個の三次元点をそれぞれが含む2つのサブ階層と、50個の三次元点を含むサブ階層とに分割されている。例えば、階層4を分割するサブ階層の数と、各サブ階層に含まれる三次元点の数とは、ユーザによる入力によって指定されてもよい。
図80で示したヘッダのシンタックス例によれば、numPointADelta[i]は、サブ階層の三次元点情報を格納されるために使用されている。この例では、配列のサイズが3であるか、numPointADelta[i]が階層4の3つのサブ階層を示す0から2までの値に設定されている。iは、サブ階層が含まれる階層を示す値である。numPointADelta[i]は、各サブ階層のサイズを示してもよいし、各サブ階層の開始点を示してもよい。サブ階層のサイズとは、サブ階層に含まれる三次元点の数である。サブ階層の開始点とは、当該サブ階層が属する階層に含まれる三次元点群の各三次元点に順番が割り振られる場合、各サブ階層に含まれる複数の三次元点の順番のうちで最も小さい順番(先頭の三次元点の順番)を示す。
numPointADelta[i]がサイズを示す場合、図100の階層4に含まれる3つのサブ階層は、例えば、numPointADelta[3]={25、25、50}と表すことができる。この場合、符号化サイズは、ほとんどの場合、カバー範囲が小さくなるので、わずかに小さいパラメータ値を生成することができる。一方で、三次元データ符号化装置および三次元データ復号装置の両方が、処理されているサブ階層のサイズを追跡する必要がある。
numPointADelta[i]が開始点を示す場合、図100の階層4に含まれる3つのサブ階層は、例えば、numPointADelta[3]={0、25、50}と表すことができる。この場合、符号化の位置は、常に最後の要素の全範囲が必要とされる。一方で、三次元点群のカウンタは、既に追跡されているため、三次元データ符号化装置および三次元データ復号装置はより容易に処理することができる。
図101は、1階層の三次元点群を一定の三次元点数でサブ階層に分類する第2の例を示す図である。図102は、第2の例における属性情報のヘッダのシンタックスの例を示す。図103は、第2の例における属性情報のシンタックスの他の例を示す。第2の例では、複数のサブ階層には共通の三次元点の数が指定される。つまり、第2の例では、サブ階層に分類される三次元点の数として1つの共通の数が指定される。
第2の例では、図102に示されるようにconst_NumPointを符号化し、サブ階層毎にADelta_QPを符号化してもよい。また、図103に示されるように、const_NumPointは、各サブ階層に対して生成され、各階層に基づいて変更されてもよい。
additional_delta_QP_present_flagは、const_NumPointを示すために実装され、ADelta_QPは、サブ階層毎に利用可能である。なお、additional_delta_QP_present_flagは、const_NumPointを常に符号化する必要がある場合、省略することもできる。同様に、各サブ階層のTotalPointは、符号化または復号の処理中に内部的に算出されてもよいし、単純化のために符号化されて、ヘッダに格納されてもよい。
const_NumPointは、各サブ階層の三次元点の数(定数)を示す。
num_sublayerは、対応するサブ階層における三次元点の総数と、const_NumPointとに基づいて分割できるサブ階層の数を示す。
このように、各サブ階層に含まれる三次元点の数を一定数とすることで、符号化または復号におけるオーバーヘッドを削減することができる。
図104は、1階層の三次元点群を予定の数とは異なる数のサブ階層に分類する第3の例を示す図である。図105は、第3の例における属性情報のヘッダのシンタックスの例を示す。図106は、第3の例における属性情報のヘッダのシンタックスの他の例を示す。第3の例では、予め定められた数のサブ階層とは異なる数、例えば予め定められた数よりも多いサブ階層に、複数の三次元点が分類される。
この例は、予定の数よりも多いサブ階層が生成されたため、DeltaQP値が割り当てられていないサブ階層が生じた例である。この場合、DeltaQP値が割り当てられていないサブ階層には、例えば0などのデフォルト値または所定の値がDeltaQP値として設定されてもよい。また、DeltaQP値が割り当てられていないサブ階層には、DeltaQP値が割り当てられているサブ階層のうちの1つのサブ階層(例えば、最後または最下層のサブ階層)に割り当てられているDeltaQP値が、DeltaQP値が割り当てられていないサブ階層のDeltaQP値として割り当てられてもよい。これにより、符号化に必要なADeltaQP値が少なくて済むため、オーバーヘッドを削減することができる。
なお、最後のサブ階層(階層)は、三次元符号化装置が所定の方法で決定した階層0から階層n-1までのn階層のうちのn-1番目の階層である。階層数は、ヘッダに付加される。所定の方法は、例えば、三次元符号化装置が各階層をレート制御しながら符号化する間において、目標とするビットレートを達成できると判定して以降のサブ階層のQP値の変更が不要であると判断した場合、以降の階層用のDeltaQP値を送信しない方法である。これにより、ヘッダの符号量を削減することができる。
符号化または復号されるADeltaQPの数を識別するシンタックスには、複数の例がある。例えば、図105に示すシンタックスは、サブ階層のDeltaQPの範囲の固定値である特定のstop_codeを有する。三次元データ復号装置は、stop_codeを取得すると、ループを終了する。三次元データ符号化装置では、DeltaQPの範囲は、符号化する必要があるか、または、三次元データ符号化装置および三次元データ復号装置の両方が認識されるように規格で定義することができる。また、例えば、図106に示すシンタックスは、num_sublayerを直接符号化して、復号できるADeltaQP値の数を示す方法である。
なお、予定数よりも少ないサブ階層が生成されることで、サブ階層の数を参照する際に余分なADeltaQP値がある場合、余分なADeltaQP値を使用せずに破棄してもよい。
図107は、1階層の三次元点群を割合(百分率)で指定された三次元点数でサブ階層に分類する第4の例を示す図である。図108は、第4の例における属性情報のヘッダのシンタックスの例を示す。第4の例では、サブ階層に分類するための割合が、各サブ階層へ分類する三次元点数として指定される。
この例では、サブ階層の三次元点群の数が、サブ階層を含む階層に含まれる三次元点の数に対する割合で指定されている。図107では、4つのサブ階層は、それぞれ、サブ階層を含む階層に含まれる三次元点の総数の25%の数、当該総数の30%の数、当該総数の30%の数、および、当該総数の15%の数の三次元点を含むことが示されている。このように、階層が複数のサブ階層に分割される場合、分割される複数のサブ階層のそれぞれに含まれる三次元点の数は、当該階層に含まれる三次元点の総数に対する、当該サブ階層に含まれる三次元点の数の割合で示されてもよい。この場合、三次元データ符号化装置および三次元データ復号装置の両方が、符号化される三次元点の数を追跡して処理する。割合は、実装方法に応じて、全三次元点群に対して算出されてもよいし、特定の階層の割合として算出されてもよい。
図108において、num_sublayerは、三次元点群の割合で除算したサブ階層の数を示す。また、percentileは、対応するサブ階層に含まれる三次元点群の総数の、当該サブ階層が属する階層に含まれる三次元点群の総数に対する割合を示す。
例えば、サブ階層に分類されていない複数の三次元点が残る場合などのように不完全な割合が残る場合、残りの複数の三次元点は、三次元データ符号化装置および三次元データ復号装置の両方で一致する実装に応じて、新たなサブ階層に分類されてもよいし、または、一つ前のサブ階層に分類されてもよい。一方、エラーが発生することにより、割合の値が許容値である100%を超える場合、サブ階層への分割は、最後の三次元点で終了する。
なお、割合が常に100%に固定されているため、1階層に含まれる複数の三次元点を複数のサブ階層に分類するために指定される複数の割合のうちの最後の割合は、除外されてもよい。この場合、割合の要素数は、Adelta_QPの要素数より1少なくなることを意味する。
図109は、1階層の三次元点群をモートンインデックスでサブ階層に分類する第5の例を示す図である。図110は、第5の例における属性情報のヘッダのシンタックスの例を示す。
第5の例では、複数のサブ階層には三次元点群のモートンコードにおけるモートンインデックスが指定される。つまり、第5の例では、1階層に含まれる三次元点群は、モートンコードを用いてサブ階層に分類される。例えば、モートンインデックスが共通する複数の三次元点は、同一のサブ階層に分類されてもよい。これにより、三次元点群は、空間的な距離が近い、例えば、所定距離よりも近い三次元点同士でグループ化されるため、例えば、各サブ階層に含まれる三次元点群は、一塊の三次元空間に含まれ、かつ、複数のサブ階層のうち、一のサブ階層に対応する三次元空間は、他のサブ階層に対応する三次元空間と重複しないこととなる。このように、1つのサブ階層には、空間的な距離が近い三次元点群が割り当てられるため、当該三次元点群は、類似の特性または属性を有する可能性が高い。よって、同じサブ階層に含まれる三次元点には、共通のQP値が使用されて符号化されるため、符号化効率を向上させることができる。
三次元点群は、階層毎にモートンオーダで配置される場合、三次元点のソートは、行われなくてもよい。三次元データ符号化装置は、どの複数の三次元点を同一のサブ階層に分類するかを事前に決定し、上記の方法を用いて各サブ階層に分類される三次元点数を設定してもよい。
num_morton_sublayerは、モートンオーダを用いたグループ化によって分割されたサブ階層の数を示す。Indexは、モートンインデックスを示す。Indexは、例えば、図109におけるモートンインデックスAが選択された場合、モートンインデックスAのノードの子ノードがサブ階層に設定される。また、モートンコードを使用して、対応するサブ階層の開始点または終了点が示されてもよい。モートンインデックスは、最下層の階層の三次元点から取得することに限らずに、上位層の階層の三次元点から取得してもよい。三次元データ符号化装置および三次元データ復号装置の両方の設定に応じて、三次元点を各サブ階層に分類するための開始点または終了点が決定されてもよい。
図111および図112は、1階層の三次元点群をモートンインデックスでサブ階層に分類する第6の例を示す図である。第6の例では、RAHTの階層構造で三次元点群が分類される場合の例である。
第6の例では、三次元点のモートンインデックスを使用して、分類する三次元点群のグループとしてのサブ階層A~Cを識別する。これにより、第5の例と同様に、共通するモートンインデックスを有する三次元点を同じサブ階層に分類する。
三次元データ符号化装置および三次元データ復号装置に応じて、三次元点群のモートンインデックスで三次元点群を分類することができる。サブ階層の設定は、任意の階層に適用することができる。指定されたモートンインデックスよりも上に位置する三次元点は、次のサブ階層へ分類されてもよいし、外れ値として扱われてもよい。
図112は、モートンインデックスで分類されるサブ階層における最後の三次元点を示す。図112では、1次元の配列表現で図14と同様のサブ階層が示されている。
モートンインデックスを用いることによるサブ階層への分類は、予測変換、リフティングまたはRAHTのデプスなどにおける特定の階層での分類に限らずに、複数の階層/デプスに分類することに適用されてもよい。この場合、サブ階層は、サブグループとなる。
図113は、1階層の三次元点群を残差またはDelta値を用いてサブ階層に分類する第7の例を示す図である。
第7の例では、例えば、Delta値は、予測変換またはリフティングにおけるLoD階層の量子化重み関数に乗算する属性情報(属性値)である。同様に、RAHTでは、Delta値は、重みに乗算する属性情報(属性値)である。Delta値は、属性情報として符号化される値であってもよく、予測変換、リフティング、RAHTまたは他の任意の方法で変換されることに関わらず、符号化処理に依存して予測後の値であってもよい。なお、図113では、Delta値は、Deltaで示されている。
Delta値は、値が小さい場合、細部が維持され、かつ、量子化されないように、少し低いQPで符号化されてもよい。これにより、解像度が低減することを抑制することができる。しかし、Delta値が大きい場合、大きなDelta値の差は容易に量子化されないため、大きなQP値が利用されてもよい。
図113において、円の半径は、Delta値の大きさを表している。Delta値が大きいほど、中心を参照する三次元点は遠くなる。
図114は、二次元のモートンオーダで並べた場合の三次元点の配列を示す図である。図115は、第7の例における属性情報のヘッダのシンタックスの例を示す。
第7の例のように、Delta値を用いて、三次元点群を複数のサブ階層に分類する場合、サブ階層のQP値は、連続する三次元点群全体をカバーしない。例えば、図114に示すように、いくつかの三次元点群は、グループAに分類され、その他の散在する三次元点群がグループBに分類され、それ以外の三次元点群の一部の三次元点群がグループCに分類される。
三次元点群は、グループインデックス値に割り当てられ、インデックス値は、Delta値と共に符号化される。なお、下位レベルにおける符号化については、後述する。なお、インデックス値は、追加の属性情報として符号化されてもよいし、SEIメッセージとして符号化されてもよい。
第7の例では、三次元点群ごとに追加のインデックスを符号化する必要があるため、オーバーヘッドが生じる可能性があるが、クロスレイヤのサブ階層のDeltaQPを可能とする。なお、三次元データ符号化装置は、インデックスを決定した後に、特定の階層の三次元点を再配置し、次に、インデックスおよび対応するQPのインデックスを昇順または降順で符号化してもよい。
num_Groupは、Delta値に基づいて分割されたグループまたはサブ階層の数を示す。
図116は、残差のビットストリームのシンタックスの例を示す。図117は、符号化コスト(Encoding cost)を算出するための式を示す。図118は、BPP(bits per point)と時間との関係を示すグラフである。
図116に示すように、残差のビットストリームを符号化している間に、インデックス情報は、各点群について符号化される。なお、indexは、三次元点が属するサブ階層またはサブグループのインデックス番号を示す。また、valuesは、予測残差(residual value)を示す。
なお、各三次元点の適切なインデックスの決定では、各属性情報の符号化コスト(図117参照)が用いられてもよいし、前に符号化された三次元点の符号化コストが用いられてもよい。このコンテキストにおける符号化コストは、各三次元点群の属性情報を符号化するのに必要なビット数と呼ばれる。符号化コストは、式によって近似的に、または、前に符号化された三次元点によって正確に、決定するために用いられる客観的な値である。
三次元データ符号化装置は、図118に示すように、BPPレート(bits per
point frequency)に基づいて、または、別の用語では毎秒符号化/復号される三次元点数のコストに基づいて、複数の三次元点をインデックスを使用して分類(グループ化)し、その符号化コストに基づいて異なるサブ階層QPを適用することで、BPPを制御してもよい。この方法は、PCC符号化のビットレートを制御するのに適している。
この方法は、フレームベースの三次元点群の符号化でも一緒に動作するため、サブ階層への分類でビットレートまたはバッファステータスが役割を果たす。バッファが閾値に近い場合、三次元点の符号化コストに加えて、高いDeltaQP値により分類(グループ化)することが好ましい。
第7の例では、上記の全ての例と同様に、サブ階層の数(グループ数)は、対応するDeltaQP値で定義される必要がある。例えば、図115に示すシンタックスでは、サブ階層の数は、属性情報のヘッダまたはSPSにおいて定義される。
図119は、属性情報の符号化に適用されるQP値が、サブ階層毎に設定されていることを示す図である。図119の(a)は、サブ階層毎にQP値を設定する方法を、RAHTの階層構造に適用した場合を示し、(b)は、LoDの階層構造に適用した場合を示す。
第7の例で説明したインデックスを使用する方法は、PCCのレート歪みRDOQ(Rate-distortion Optimized quantization)法と組み合わせて使用することもでき、歪みとビットコストとの最適な組み合わせに基づいている。
RDOQは、さまざまな、サブ階層におけるDeltaQPの設定を使用して、各三次元点群の属性情報に再帰的に実装することができる。各サブ階層に設定されるDeltaQPは、処理時間を短縮するために、属性情報のヘッダまたはSPSにおいて最初に(予め)設定することができる。SPSに設定される場合、全てにおいて共通する。RDOQは、これらのDeltaQPのセットを再帰的に実行するだけで、残差のビットストリームのシンタックスにおける特定のサブ階層のインデックスを使用することで、効率よく符号化される。
図120は、三次元点群をモートンコードを用いてサブ階層に分類する第8の例を示す図である。図121は、第8の例における属性情報のヘッダのシンタックスの例を示す。
本実施の形態において、第5の例および第6の例では、三次元点のモートンコードを用いて三次元点群を複数のサブ階層(グループ)にグルーピングし、各サブ階層(各グループ)に対してAdelta_QPを設定できるような方法を説明したが、必ずしもこれに限らない。例えば、三次元点の位置情報(x,y,z)を用いて、三次元点群をグルーピングし、各グループに対してAdelta_QPを設定するようにしてもよい。
具体的には、グループAについて、中心座標cA、半径rAおよびADelta_QP_Aを定義し、グループBについて、中心座標cB、半径rBおよびADelta_QP_Bを定義する。同様に、他のグループがある場合についても、各グループについて、中心座標、半径およびADelta_QPを定義する。そして、属性情報のヘッダに、各グループにおいて定義した中心座標、半径およびADelta_QPと、総グループ数等を付加する。
そして、三次元データ符号化装置は、処理対象の三次元点の位置座標が、グループA(中心座標cAかつ半径rAの球体)に含まれる場合は、ADelta_QP_Aを適用し、グループB(中心cBかつ半径rBの球体)に含まれる場合は、ADelta_QP_Bを適用してもよい。また、三次元データ符号化装置は、処理対象の三次元点がグループAおよびグループBの両方の球体に含まれる場合、処理対象の三次元点と各グループの中心座標cAおよびcBまでの距離を算出し、距離が近い方のADelta_QPを適用してもよい。
これにより、三次元空間において距離が近い三次元点に対し、値が近いADelta_QPを適用することができるため、符号化または復号後の三次元点の主観画質を領域に応じて制御することが可能となる。
また、三次元データ符号化装置は、例えば、あるオブジェクトの主観画質を向上したい場合、そのオブジェクトを構成する三次元点の中心座標をグループ101の中心座標、そのオブジェクトの大きさの半分を半径とし、グループ101のADelta_QPを例えば負の値にしてもよい。これにより、グループ101に属する(グループ101の球体内に含まれる)三次元点の属性符号化の量子化ステップ値を小さくすることができ、結果、あるオブジェクトの主観画質を向上することができる。
なお、図120では、三次元点群を分類する三次元空間のグループ101、102が示されている。グループ101は、中心点O1から半径R1の球体の空間に含まれる三次元点121を含む。グループ102は、中心点O2から半径R2の球体の空間に含まれる三次元点122を含む。グループ101に属する三次元点の符号化には、グループ101に設定されているADelta_QP_Oが適用される。グループ102に属する三次元点の符号化には、グループ102に設定されているADelta_QP_Pが適用される。各グループを規定するための基準となる点である中心点O1および中心点O2は、それぞれ、三軸の座標値を用いて表される。
なお、グループ101およびグループ102の両方に含まれる三次元点123が存在していてもよい。三次元点123の符号化には、グループ101に設定されているADelta_QP_Oと、グループ102に設定されているADelta_QP_Pとの加算値または平均値が適用されてもよい。これにより、より細かなQP値の制御が可能となる。また、各三次元点は複数のグループに属しても構わない。その場合、処理対象の三次元点が属する全てのグループのADelta_QPの加算値を、処理対象の三次元点のADelta_QP値としてもよい。これにより、三次元空間のある領域のQP値をより柔軟に制御することができる。
なお、グループ101のADelta_QP_Oを例えば負の値に設定し、QP値を下げてもよい。これにより、グループ101に属する三次元点の属性情報の符号化による劣化を抑えることができる。
また、逆にグループOのADelta_QP_Oを例えば正の値に設定し、QP値を上げてもよい。これにより、グループ101に属する三次元点の属性情報の符号量を削減することができる。
なお、グループを定義するための三次元空間として球体を用いる例を示したが、必ずしもこれに限らず、楕円体や立方体を用いてグループを定義しても構わない。この場合は、それぞれの形状を定義するパラメータをヘッダや制御情報に付加してもよい。
なお、図121において、num_groupは、グループの総数を示す。center_x, center_y, center_zは、各グループの中心座標を示す。radiusは、各グループの半径を示す。グループとして楕円体や立方体を用いる場合は、それらを表すためのパラメータがヘッダなどに付加されてもよい。例えば、立方体または直方体を用いる場合は、基準点の座標と、基準点からの幅、奥行および高さとを表すためのパラメータがヘッダなどに付加されてもよい。また、グループを定義するための三次元空間の形状として球体や楕円体など、複数の形状を用いる場合は、当該三次元空間がどの形状かを示す情報がヘッダに付加されてもよい。
以上のように、本実施の形態に係る三次元データ符号化装置は、図122に示す処理を行う。三次元データ符号化装置は、点群データに含まれる複数の三次元点の複数の属性情報から複数の係数値を算出し(S8501)、前記複数の係数値の各々を量子化することで複数の量子化値を生成し(S8502)、前記複数の量子化値を含むビットストリームを生成する(S8503)。前記複数の係数値は、複数の階層のいずれかに属する。前記複数の階層における予め定められた数の階層のそれぞれには、当該階層用の量子化パラメータが割り当てられている。前記量子化(S8502)では、前記複数の係数値の各々を、(i)当該係数値が属する階層に量子化パラメータが割り当てられている場合、当該量子化パラメータを用いて量子化し、(ii)当該係数値が属する階層に前記量子化パラメータが割り当てられていない場合、前記予め定められた数の階層のうちの一の階層に割り当てられた量子化パラメータを用いて量子化する。これによれば、当該三次元データ符号化方法は、階層毎に量子化パラメータを切り替えることができるので、適切に符号化を行える。
例えば、前記一の階層は、前記予め定められた数の階層のうちの最後の階層である。
例えば、前記量子化(S8502)では、前記複数の階層の数が前記予め定められた数よりも少ない場合、前記複数の階層に対応していない前記予め定められた数の階層に割り当てられた量子化パラメータは用いられない。
例えば、前記ビットストリームは、基準量子化パラメータを示す第1情報と、前記基準量子化パラメータから前記複数の階層用の複数の量子化パラメータを算出するための複数の第2情報とを含む。このため、符号化効率を向上できる。
なお、ステップS8501、S8502、S8503は、それぞれ、実施の形態9の各処理に対応する。
例えば、三次元データ符号化装置は、プロセッサと、メモリとを備え、プロセッサは、メモリを用いて、上記の処理を行う。
本開示の一態様に係る三次元データ復号方法は、図123に示す処理を行う。三次元データ復号装置は、ビットストリームに含まれる複数の量子化値の各々を逆量子化することで複数の係数値を生成し(S8511)、前記複数の係数値から、点群データに含まれる複数の三次元点の複数の属性情報を算出する(S8512)。前記複数の量子化値は、複数の階層のいずれかに属する。前記複数の階層における予め定められた数の階層のそれぞれには、当該階層用の量子化パラメータが割り当てられている。前記逆量子化(S8511)では、前記複数の量子化値の各々を、(i)当該量子化値が属する階層に量子化パラメータが割り当てられている場合、当該量子化パラメータを用いて逆量子化し、(ii)当該量子化値が属する階層に前記量子化パラメータが割り当てられていない場合、前記予め定められた数の階層のうちの一の階層に割り当てられた量子化パラメータを用いて逆量子化する。これによれば、当該三次元データ復号方法は、階層毎に量子化パラメータを切り替えることができるので、適切に復号を行える。
例えば、前記一の階層は、前記予め定められた数の階層のうちの最後の階層である。
例えば、前記逆量子化では、前記複数の階層の数が前記予め定められた数よりも少ない場合、前記複数の階層に対応していない前記予め定められた数の階層に割り当てられた量子化パラメータは用いられない。
例えば、前記ビットストリームは、基準量子化パラメータを示す第1情報と、前記基準量子化パラメータから前記複数の階層用の複数の量子化パラメータを算出するための複数の第2情報とを含む。このため、符号化効率が向上されたビットストリームを適切に復号できる。
なお、ステップS8511、S8512は、それぞれ、実施の形態9の各処理に対応する。
例えば、三次元データ復号装置は、プロセッサと、メモリとを備え、プロセッサは、メモリを用いて、上記の処理を行う。
また、本開示の他の一態様に係る三次元データ符号化方法は、図122を用いて説明したステップS8501、S8502、S8503について、下記のように処理してもよい。他の一態様に係る三次元データ符号化方法は、点群データに含まれる複数の三次元点の複数の属性情報から複数の係数値を算出し(S8501)、前記複数の係数値の各々を量子化することで複数の量子化値を生成し(S8502)、前記複数の量子化値を含むビットストリームを生成する(S8503)。前記複数の係数値のそれぞれは、複数の三次元空間のうち、当該係数値の算出の基になった属性情報を含む三次元点が属する三次元空間毎に分類されることで、複数のグループのいずれかに属する。前記量子化(S8502)では、前記複数の係数値の各々を、当該係数値が属するグループ用の量子化パラメータを用いて量子化する。これによれば、当該三次元データ符号化方法は、グループ毎に量子化パラメータを切り替えることができるので、適切に符号化を行える。
例えば、前記ビットストリームは、前記複数のグループのそれぞれについて、当該グループに対応する三次元空間の基準点と、当該グループに対応する三次元空間のサイズとを示す空間情報を含む。
例えば、前記ビットストリームは、前記空間情報および前記空間情報で示される三次元空間のグループ用の量子化パラメータとが含まれるか否かを示すフラグを含む。
例えば、三次元データ符号化装置は、プロセッサと、メモリとを備え、プロセッサは、メモリを用いて、上記の処理を行う。
また、本開示の他の一態様に係る三次元データ復号方法は、図123を用いて説明したステップS8511、S8512について、下記のように処理してもよい。ビットストリームに含まれる複数の量子化値の各々を逆量子化することで複数の係数値を生成し(S8511)、前記複数の係数値から、点群データに含まれる複数の三次元点の複数の属性情報を算出する(S8512)。前記複数の量子化値は、複数の三次元空間のうち、当該量子化値の算出の基になった属性情報を含む三次元点が属する三次元空間毎に分類されることで、複数のグループのいずれかに属する。前記複数の階層における予め定められた数の階層のそれぞれには、当該階層用の量子化パラメータが割り当てられている。前記逆量子化では、前記複数の量子化値の各々を、当該量子化値が属する階層用の量子化パラメータを用いて逆量子化する。
例えば、前記ビットストリームは、前記複数のグループのそれぞれについて、当該グループに対応する三次元空間の基準点と、当該グループに対応する三次元空間のサイズとを示す空間情報を含む。
例えば、前記ビットストリームは、前記空間情報および前記空間情報で示される三次元空間のグループ用の量子化パラメータとが含まれるか否かを示すフラグを含む。
例えば、三次元データ復号装置は、プロセッサと、メモリとを備え、プロセッサは、メモリを用いて、上記の処理を行う。
(実施の形態11)
複数の属性情報から算出される複数の係数値を量子化するのに用いられる量子化パラメータ(QP)は、複数の属性情報を含む三次元点が属する三次元空間(領域)に対応するグループに予め対応付けられていてもよい。なお、複数の三次元点は、グループに属していない三次元点を含んでいてもよい。グループに属していない三次元点に含まれる属性情報は、所定の量子化パラメータを用いて量子化される。所定の量子化パラメータは、例えば、初期値として設定されている量子化パラメータであり、固定値であってもよい。このように、各属性情報は、当該属性情報を含む三次元点がグループに属する場合には当該グループに対応付けられた量子化パラメータがその量子化に用いられ、当該属性情報を含む三次元点がグループに属さない場合には所定の量子化パラメータがその量子化に用いられる。
この場合において、複数の属性情報の各々を高周波成分と低周波成分とに分けて階層化した階層構造を生成することで複数の係数値が算出される場合、上位の階層の係数値は、2以上の属性情報が用いられることで算出される。これらの2以上の属性情報を含む2以上の三次元点は、異なる三次元空間に属する可能性があり、この場合、2以上の属性情報には、互いに異なる複数の量子化パラメータが割り当てられている。このため、上位の階層の係数値の量子化に用いる量子化パラメータを、これらの複数の量子化パラメータを用いて決定することが考えられる。
図124は、三次元モデル9000の三次元点群が属する三次元空間の一例について説明するための図である。
人物の三次元モデル9000を構成する三次元点群の重要度および画質(品質)は、三次元点群が保持する詳細情報の量またはデータ量と同様に、注視している中心点からの位置情報に基づいて、異なる方法で評価される。
例えば、人物の顔領域は、重要度が高いため、より良い品質が求められる。このため、直方体形状の三次元空間9001に含まれる三次元点群の符号化において用いられる量子化パラメータをより小さい値の量子化パラメータに設定することで、人物の顔領域の三次元モデルの品質を向上させることができる。三次元空間9001は、例えば図125のシンタックスに示されるように、当該三次元空間9001の原点9002の座標(x1,y1,z1)と、当該三次元空間9001の長さ、幅および奥行とで定義される。図125は、属性情報のヘッダのシンタックスの一例を示す。
原点9002の座標は、図125において、origin_x[i]、origin_y[i]およびorigin_z[i]で示される。三次元空間9001の長さはlength[i]で示され、幅はwidth[i]で示され、奥行はdepth[i]で示される。ADelta_QPは、元のスライスのQPからのデルタQP値(差分)を定義する値であり、使用シナリオに応じて、画質(品質)を向上させるために負の値になってもよいし、圧縮率を増加させるために正の値になってもよい。
量子化パラメータが対応付けられるグループに対応する三次元空間(delta_QP領域)は、上記の直方体形状の三次元空間9001に限らない。例えば、球形状の三次元空間9003であってもよい。三次元空間9003は、当該三次元空間9003の原点9004の座標(x2,y2,z2)と、原点9004を中心とする当該三次元空間9003の球形状の半径rとで定義される。図124では、例えば、三次元空間9003は、人物が運んでいる荷物9005の三次元モデルを含むように設定されてもよい。
グループに対応する三次元空間(delta_QP領域)は、量子化パラメータが画質に適応するために、またはより多くのビット/ポイント性能を得るために調整されることが要求される固定の関心領域を定義する限り、どのように定義されてもよい。なお、三次元空間9003は、図121のシンタックスで示される。原点9004の座標は、図121において、center_x[i]、center_y[i]およびcenter_z[i]で示される。半径rは、radius[i]で示される。
図126および図127は、三次元点群が属する三次元空間の他の一例について説明するための図である。
図126は、LIDARでスキャンして得られた三次元点群データ9010上において、車両9012の周囲360°の半球の形状の三次元空間9011が、三次元空間上の関心領域として設定されている例である。三次元空間9011は、車両9012を上面視したときの車両9012の中心が半球の形状の底面の中心と一致するように、設定されていてもよい。この三次元空間9011は、例えば、道路の路面を底面としている。三次元空間9011が半球の形状に設定されているのは、道路上の物体をLIDARでスキャンして得られた三次元点群データには、道路の下の点群データがないからである。三次元空間9011は、車両9012の周囲の領域であり、重要度が高い。このため、より詳細な情報を確保するために、デルタQP値は、負の値に設定されてもよい。
図127は、LIDARでスキャンして得られた三次元点群データ9020上において、車両9022の周囲360°の円柱形状の三次元空間9021が、三次元空間上の関心領域として設定されている例である。このように、図126の半球の形状の代わりに円柱形状の三次元空間9021が、車両9022を上面視したときの車両9022の中心が円柱形状の底面の中心と一致するように、設定されていてもよい。
図128は、円柱形状の三次元空間が設定される場合の属性情報のヘッダのシンタックスの一例を示す。
三次元空間9021は、当該三次元空間9021の底面の中心座標を原点とした場合の、原点の座標(origin_x[i]、origin_y[i]およびorigin_z[i])と、円形の底面の半径rを示すparameter1[i]と、円柱の高さhを示すparameter2[i]とで定義される。ヘッダのシンタックスには、三次元空間の形状の種類がさらに含まれていてもよい。このように、ヘッダのシンタックスでは、関心領域は任意の形状およびサイズに基づいて自由に定義でき、各形状のパラメータは事前に定義できることが示されている。
なお、三次元空間の形状が半球である場合には、球形状である場合と同様に、原点の座標と、原点を中心とする半球の半径とで定義される。
図129は、三次元空間毎に異なる量子化パラメータを適用する処理の一例を示すフローチャートである。
まず、三次元データ符号化装置は、量子化パラメータが対応付けられたグループに三次元点群を分類するための三次元空間の境界を特定する(S9001)。具体的には、上記で例示した属性情報のヘッダのシンタックスに含まれる、三次元空間の原点、および、三次元空間のサイズを用いて境界を特定する。このとき、三次元空間の形状の種類が設定されていれば、形状の種類が用いられてもよい。
次に、三次元データ符号化装置は、点群データに含まれる複数の三次元点の各々についてループを行う。ループには、ステップS9002およびステップS9003が含まれる。
三次元データ符号化装置は、ループにおいて、まず、処理対象の三次元点が特定した三次元空間内にあるか否かを判定する(S9002)。例えば、三次元データ符号化装置は、チェック関数を用いて、Delta_QPが対応付けられた特定の三次元空間内に処理対象の三次元点が属しているか否かを判定する。三次元データ符号化装置は、複数の三次元空間が指定された場合、指定された複数の三次元領域の各々の境界と、処理対象の三次元点との照合を行う。チェック関数は、処理対象の三次元点が特定した境界以下であるか、指定された境界以上であるかを判定するMIN/MAX関数を含む。MIN/MAX関数は、x軸、y軸およびz軸の各々について個別に実行され、処理対象の三次元点が、三次元空間の境界の内側を示す値または外側を示す値を出力する。例えば、MIN/MAX関数は、0か1の二値を結果として出力する。これにより、処理対象の三次元点が属している三次元点空間が特定される。なお、三次元データ符号化装置は、処理対象の三次元点が属している三次元空間が無いと判定してもよい。
次に、三次元データ符号化装置は、処理対象の三次元点が特定した三次元空間内にあると判定した場合(S9002でYes)、特定した三次元空間に対応付けられているグループのDelta_QPを適用して量子化パラメータを算出し、算出した量子化パラメータを用いて処理対象の三次元点の属性情報を符号化する(S9003)。
三次元データ符号化装置は、処理対象の三次元点が特定した三次元空間内にないと判定した場合(S9002でNo)、ステップS9003をスキップする。
処理対象の三次元点についてステップS9002およびステップS9003が終了すると、ループが行われていない未処理の次の三次元点についてステップS9002およびステップS9003を実行する。
領域ベースのDelta_QPの調整は、符号化処理が継続され、三次元点群参照の連続性を崩すようなスライスヘッダからの新たな設定がないという点で、タイルベースまたはスライスベースのDelta_QPの調整とは異なる。このため、より効率的な予測アルゴリズムを実行でき、符号化性能を向上させることができる。
タイルおよびスライスなどのように、三次元点群を複数のサブ点群に分割し、それぞれのサブ点群で量子化パラメータを異ならせる場合、サブ点群間での参照が禁止されることが多く、予測効率低下により符号化効率が低下することがある。一方、本手法を適用する場合、三次元点間の参照を禁止することなく、各三次元点に割当てられる量子化パラメータを異ならせることができるため、符号化効率を維持しながら、より細かな量子化パラメータの調整を行うことができる。
図130は、三次元空間毎に異なる量子化パラメータを適用する処理の他の一例を示すフローチャートである。
まず、三次元データ符号化装置は、量子化パラメータが対応付けられたグループに三次元点群を分類するための1以上の三次元空間の境界を特定する(S9011)。ステップS9011は、ステップS9001と同じ処理である。
次に、三次元データ符号化装置は、特定した複数の三次元空間の各々についてループ1を行う。ループ1には、ループ2が含まれる。三次元データ符号化装置は、点群データに含まれる複数の三次元点の各々についてループ2を行う。ループ2には、ステップS9012~S9015が含まれる。なお、ループ2は、複数の属性情報を用いて量子化の対象となる複数の係数値が算出される場合、複数の係数値のそれぞれについて行われてもよい。
三次元データ符号化装置は、ループ2において、まず、処理対象の三次元点、または、処理対象の係数値が処理対象の三次元空間に対応するか否かを判定する(S9012)。ステップS9012は、処理対象が三次元点である場合には、ステップS9002と同じ処理である。三次元符号化装置は、処理対象が係数値である場合には、当該係数値の算出の基になった1以上の属性情報を特定し、特定した1以上の属性情報を含む1以上の三次元点の各々が属する三次元空間が、処理対象の三次元空間を含むか否かを判定する。1以上の三次元点の各々が属する三次元空間が処理対象の三次元空間を含む場合、三次元データ符号化装置は、処理対象の係数値が処理対象の三次元空間に対応すると判定する。反対に、1以上の三次元点の各々が属する三次元空間が処理対象の三次元空間を含まない場合、三次元データ符号化装置は、処理対象の係数値が処理対象の三次元空間に対応しないと判定する。ここで、1以上の三次元点の各々が属する三次元空間を特定する方法は、ステップS9002と同様の方法を用いることができる。
次に、三次元データ符号化装置は、処理対象の三次元点、または、処理対象の係数値が処理対象の三次元空間に対応すると判定した場合(S9012でYes)、処理対象の三次元点が交差領域に含まれるか否か、または、処理対象の係数値がQPジャンクションの値であるか否かを判定する(S9013)。交差領域は、複数の三次元空間が重複している領域である。QPジャンクションについては、後述する。
三次元データ符号化装置は、処理対象の三次元点が交差領域に含まれる場合、または、処理対象の係数値がQPジャンクションの値である場合(S9013でYes)、ジャンクションQP法を実行することで、適用するDelta_QPを算出し、算出したDelta_QPに基づく量子化パラメータを用いて処理対象の三次元点の属性情報、または、処理対象の係数値を符号化する(S9014)。ジャンクションQP法の具体例は、後述する。
三次元データ符号化装置は、処理対象の三次元点が交差領域に含まれない場合、または、処理対象の係数値がQPジャンクションの値でない場合(S9013でNo)、処理対象の三次元点または処理対象の係数値について特定された三次元空間に対応付けられているグループのDelta_QPを適用して量子化パラメータを算出し、算出した量子化パラメータを用いて処理対象の三次元点の属性情報を符号化する(S9015)。
三次元データ符号化装置は、処理対象の三次元点、または、処理対象の係数値が処理対象の三次元空間に対応しないと判定した場合(S9012でNo)、ステップS9013~S9015をスキップする。
処理対象の三次元点または係数値についてステップS9012~S9015が終了すると、ループ2が行われていない未処理の次の三次元点についてステップS9012~S9015を実行する。
処理対象の三次元空間についてループ2が終了すると、ループ1が行われていない未処理の次の三次元空間についてループ1を実行する。次のループ1におけるループ2で処理対象となる三次元点または係数値は、それより前の処理のステップS9012でNoと判定された三次元点または係数値であってもよい。
領域ベースのDelta_QPの調整は、符号化処理が継続され、三次元点群参照の連続性を崩すようなスライスヘッダからの新たな設定がないという点で、タイルベースまたはスライスベースのDelta_QPの調整とは異なる。このため、より効率的な予測アルゴリズムを実行でき、符号化性能を向上させることができる。
各三次元点は、複数の三次元空間に属していてもよい。つまり、各三次元点は、複数の三次元空間が重複する領域である交差領域に含まれていてもよい。その場合、属する全ての三次元空間に対応付けられている全てのDelta_QP(または量子化パラメータ)について、全てのDelta_QPの最小値、最大値、平均値または加算値をその三次元点のDelta QPとして用いるようにしてもよい。これにより、三次元空間の特定の領域の三次元点を符号化するために用いる量子化パラメータをより柔軟に制御することができる。
PCC(Point Cloud Compression)での属性情報の符号化では、良好な圧縮を達成するために、予測/リフティング変換およびRAHT(Region Adaptive Hierarchical Transform)などの変換方法が用いられる。変換関数は、2つ以上のノードを取り、属性情報のエネルギーレベルを高周波成分および低周波成分に分割する。これにより、より高い周波数成分の値が量子化され、この処理により高周波ノイズが除去された後に残差が符号化される。そして、低周波成分は次の上位階層に持ち上がる。
図131は、RAHTを用いた属性情報の符号化の第1の例を説明するための図である。
この場合、三次元データ符号化装置は、複数の三次元点について図131に示すようなRAHTの階層構造を生成する。具体的には、三次元データ符号化装置は、入力される複数の三次元点の複数の属性情報のうちで所定の並び順(例えばモートンコード順)で隣り合う2つの属性情報に対してHaar変換を適用して上位階層の属性情報を順次生成することを繰り返すことで、Haar変換後の符号化係数を算出する。そして、三次元データ符号化装置は、算出した符号化係数を、ビットストリームを生成する。
このようなRAHTの例では、予め定義された領域内の選択された数のノードが、負のデルタQP値によって設定されているものとする。各階層から量子化とRAHTとが上に進むと、例えばノードL2,0H2,0は、ノードL3,0H3,0およびノードL3,
1H3,1を用いて算出される。この場合、ノードL2,0H2,0の量子化には、ノードL3,0H3,0に適用される第1のデルタQP(または第1のQP値)と、ノードL3,1H3,1に適用される第2のデルタQP(または第2のQP値)とを用いることができる。例えば、ノードL3,1H3,1を算出するために用いられた2つの属性情報を有する2つの三次元点は、領域9030に属しており、領域9030には、第2のデルタQPが対応付けられている。領域9030は、例えば、図124~図128を用いて説明した、QP値が対応付けられるグループに分類するための三次元空間のいずれかによって規定される領域である。
このように、2つの異なるQP値が設定されているノードの上位のノードをQPジャンクションと呼ぶ。第1のデルタQPは通常の値であり、第2のデルタQPは上述したように負の値に設定されている場合、三次元データ符号化装置は、例えば、小さい方のデルタQPをノードL2,0H2,0の量子化に適用するデルタQPとして採用してもよい。以降同様に、三次元データ符号化装置は、RAHTの階層構造において、互いに異なる2つのQP値が設定されている2つの下位のノードの上位のノードの係数値を量子化するQP値として、下位のノードの2つのQP値のうちの小さい方のQP値を採用する。そして、三次元データ符号化装置は、採用したQP値を用いてノードの係数値を量子化する。なお、三次元データ符号化装置は、下位のノードの2つのQP値のうちの小さい方のQP値を採用する代わりに、最小のQP値を上位ノードのQP値として採用してもよい。
この例では、選択された適切な方法は、最良の品質を維持するためにより小さいQP値に設定することによって、次の階層へ伝播される低周波成分の損失を小さくすることができる。
QPジャンクションのノードに適用するQP値を決定する方法は、多数ある。しかし、同じ方法を符号化および復号の両方の処理に適用する必要がある。図131で説明した、下位層の2つのノードに適用される2つのQP値のうちの小さい方のQP値を上位ノードで採用する方式の他に、RAHT符号化またはRAHT復号の処理に変更を必要としない方式もある。
図132は、RAHTを用いた属性情報の符号化の第2の例を説明するための図である。
図132に示すように、モートンコード順で属性情報が左から右へ並べ返られている場合のRAHTの階層構造について考える。この場合、三次元データ符号化装置は、QPジャンクションのノードでは、2つの下位ノードのうちで右側に配置されるノードに適用されるQP値を、当該QPジャンクションのノードの係数値を量子化するのに用いるQP値として採用してもよい。
なお、図132では常にモートンコード順で右側に位置するノードに割当てられたQP値を上位層のノードに適用する例を示したが、必ずしもこれに限らない。例えば、モートンコード順で常に左側に位置するノードに割当てられたQP値を上位層のノードの係数値を量子化するのに用いるQP値として採用してもよい。
このように、三次元データ符号化装置は、2つの下位ノードのうちの右側または左側のノードに適用されるQP値を上位ノードのQP値として採用すればよいため、QPジャンクション毎に右側の下位ノードのQP値、および、左側の下位ノードのQP値のうちのどちらのQP値を上位ノードに適用するかを選択する必要がない。このため、三次元データ符号化装置は、選択に要する処理量を抑制しつつ、下位ノードに割り当てられているQP値を上位ノードに受け渡すことができる。
図133は、RAHTを用いた属性情報の符号化の第3の例を説明するための図である。
三次元データ符号化装置は、第1の例とは反対に、RAHTの階層構造において、互いに異なる2つのQP値が設定されている2つの下位のノードの上位のノードの係数値を量子化するQP値として、下位のノードの2つのQP値のうちの大きい方のQP値を採用してもよい。これにより、Delta_QPを有する領域9030内の三次元点群の符号化効率を特別に制御しながら、圧縮性能を確保することができる。なお、三次元データ符号化装置は、下位のノードの2つのQP値のうちの大きい方のQP値を採用する代わりに、最大のQP値を上位ノードのQP値として採用してもよい。
図134は、RAHTを用いた属性情報の符号化の第4の例を説明するための図である。
三次元データ符号化装置は、第4の例では、下位ノードの2つのQP値を加重平均により算出し、加重平均した結果を上位ノードのQP値として採用してもよい。図134では、ノードL1,0H1,0に適用するQP値の算出例が示されているノードL1,0H1
,0の下位ノードであるノードL2,0H2,0のQP値は31であり、同じく下位ノードであるノードL2,1は、デルタQP値が-2に設定されている。ノードL2,1が属する領域9031よりも左側のノードのスライスQP値は32であり、このスライスQP値を基準とすることで、ノードL2,1に適用されるQP値を算出することができる。具体的には、ノードL2,1に適用されるQP値は、領域9031の左側のノードのスライスQP値と、ノードL2,1が属する領域9031のデルタQP値とを加算した30である。
次に、三次元データ符号化装置は、荷重平均の重み係数を決定する。三次元データ符号化装置は、例えば、ノードL2,0H2,0を含む下位ノードの数と、ノードL2,1を含む下位ノードの数に基づいて加重平均の重み係数を決定してもよい。ノードL2,0H2,0を含む下位ノードの数は7であり、ノードL2,1を含む下位ノードの数は4である。このため、ノードL1,0H1,0に適用するQP値は、下記の式を用いて31と算出される。
QP=(7*32+4*30)/11=31
このように、QPジャンクションのノードに適用するQP値は、下位ノードを含む当該下位ノードにぶら下がる複数の下位ノードの数を重みとする加重平均により算出される。算出結果が小数である場合、最も近い整数に切り上げた値がQP値として採用される。
図135は、RAHTの階層構造(木構造)の例を示す図である。例えば、図135に示すように木構造の深さ毎に独立したQt0~Qt2が設定される。また、図135に示すように、RAHTの階層構造では、各ノードの重みW0.0、W1.0、W1.1、W3.0、W3.1、W3.3、および、W3.4が設定され、これらの重みW0.0、W1.0、W1.1、W3.0、W3.1、W3.3、および、W3.4が第4の例における加重平均の重み係数として用いられてもよい。
図136は、RAHTを用いた属性情報の符号化の第5の例を説明するための図である。
三次元データ符号化装置は、第5の例では、下位ノードの2つのQP値の平均を上位ノードのQP値として採用してもよい。図136では、例えば、ノードL2,0H2,0に適用されるQP値は、その下位ノードであるノードL3,0H3,0のQP値(=32)と、ノードL3,1H3,1のQP値(=30)との平均である31として算出される。また、例えば、ノードL1,0H1,0に適用されるQP値は、その下位ノードであるノードL2,0H2,0のQP値(=31)と、ノードL2,1のQP値(=29)との平均である30として算出される。
このように、三次元データ符号化装置は、量子化において、下位層の2つの係数値に各々割り当てられている2つのQP値の平均を算出し、当該平均を上位層の係数値を量子化するのに用いるQP値として採用してもよい。
第5の例の場合、第4の例と比較して、ノードの数に関係なく2つの下位ノードに割り当てられているQP値の平均が上位ノードのQP値として適用されるため、上位ノードのQP値の算出処理に係る負荷を低減でき、かつ、算出処理を高速に実行することができる。また、圧縮効率を向上させることができる。また、属性情報の品質が低下することを抑制することができる。
また、RAHTの階層構造への2点の入力を用いて算出された新しいノードの位置に基づいて、QPジャンクションのノードに適用されるQP値の効率的な算出に適したアルゴリズムもある。図137に示されるように、デルタQPは、算出された新しいノードの位置に基づいて、選択されてもよい。QPジャンクションのノードが左ノードに近い場合、左ノードからのQP値の影響が大きくなる。
図138は、属性情報の符号化処理を実行する処理部の一例を示すブロック図である。
RAHTに記載されているQPジャンクションのノードに適用するQP値の算出方法は、他の属性変換でもレベル/階層毎にQPの算出が必要である場合、伝播または更新することができる。なお、これに限らずに、LoDの階層化構造を生成して符号化するリフティング変換において、QP値を適応的に調整する処理にも適用できることを示している。
図138において、分割部9041は、属性情報を、高周波成分H(N)と、低周波成分L(N)とに分割する。予測部9042は、低周波成分L(N)に基づいて予測値P(N)を生成する。そして、高周波成分H(N)と予測値P(N)との差分が予測残差D(N)として算出される。更新部9043は、予測残差D(N)を用いて更新値U(N)を生成し、低周波成分L(N)と更新値U(N)とが加算された値を、階層(N)の上位の階層(N-1)の分割部9044に送る。更新部9043は、高周波成分H(N)のQP値と、低周波成分(N)のQP値とを比較して、小さい方のQP値(最小のQP値)を、両方のノードに類似した詳細さを保持するための更新に用いる。
分割部9044、予測部9045および更新部9046は、上位の階層(N-1)における処理を実行する処理部であり、それぞれ、分割部9041、予測部9042および更新部9043と同様の機能を有する。なお、フォワード変換の場合、更新部9043、9046は、QP値を適宜更新してもよい。
図139は、LoDの階層構造における属性情報およびQP値の関係を示す図である。
図139の(a)は、LoDの階層構造における属性情報の関係を示し、図139の(b)は、LoDの階層構造におけるQP値の関係を示す。
属性情報b0、b1、b2を用いて属性情報a0の値を予測した場合、属性情報a0の量子化パラメータQPa0は、属性情報b0、b1、b2の量子化パラメータQPb0、QPb1、QPb2の算出に用いられる。
図140は、属性情報の復号処理を実行する処理部の一例を示すブロック図である。
リフティングの逆変換については、更新部9051は、QP値を更新する。更新部9051は、予測残差D(0)のQP値と、低周波成分L’(0)のQP値とを比較して、小さい方のQP値(最小のQP値)を、両方のノードに類似した詳細さを保持するための更新に用いる。低周波成分L’(0)から更新値U(0)が減算されることで、低周波成分L(0)が算出される。
予測部9052は、低周波成分L(0)に基づいて予測値P(0)を生成する。そして、予測残差D(0)と予測値P(0)とが加算されることで、高周波成分H(0)が算出される。
結合部9053は、高周波成分H(0)と、低周波成分L(0)とを加算することで下位層の低周波成分L’(1)を算出する。
更新部9054、予測部9055および結合部9056は、下位の階層(1)における処理を実行する処理部であり、それぞれ、更新部9051、予測部9052および結合部9053と同様の機能を有する。
なお、図139では、量子化パラメータQPb0と量子化パラメータQPa0との最小値を量子化パラメータQPb0に適用する例を示したが、必ずしもこれに限らない。例えば、量子化パラメータQPb0および量子化パラメータQPa0の最大値、もしくは平均値、もしくは加算値を量子化パラメータQPb0に適用してもよい。また平均値を算出する場合、属性情報b0の三次元点と属性情報a0の三次元点との距離に応じて重み付き加算平均した値を量子化パラメータQPb0に適用しても構わない。これにより、下位層のQPを上位層に細かく受け渡すことができ、柔軟にQP値を制御できる。
以上のように、本実施の形態に係る三次元データ符号化装置は、図141に示す処理を行う。三次元データ符号化装置は、点群データに含まれる複数の三次元点の複数の属性情報から複数の係数値を算出し(S9021)、前記複数の係数値を量子化することで複数の量子化値を生成し(S9022)、前記複数の量子化値を含むビットストリームを生成し(S9023)、前記複数の属性情報のうちの少なくとも一部の属性情報は、直方体形状を有する複数の三次元空間のうち、当該属性情報を含む三次元点が属する三次元空間毎に分類されることで、複数のグループのいずれか1つに属し、前記量子化では、前記複数の係数値を、当該係数値の算出の基になった1以上の属性情報が属する1以上のグループ用の1以上の量子化パラメータ、または、所定の量子化パラメータを用いて量子化する。これによれば、当該三次元データ符号化方法は、1以上のグループ毎の1以上の量子化パラメータ、または、所定の量子化パラメータを用いて切り替えることができるので、適切に符号化を行える。
例えば、前記複数の三次元空間の各々は、当該三次元空間の原点と、当該三次元空間の長さ、幅および奥行とで示される。
例えば、前記算出(S9021)では、前記複数の属性情報の各々を高周波成分と低周波成分とに分けて階層化した階層構造を生成することで、前記複数の係数値を算出する。
例えば、前記算出(S9021)では、第1階層に属する2つの第1係数値を用いて、前記第1階層よりも1つ上の第2階層に属する第2係数値を算出し、前記量子化(S9023)では、前記2つの第1係数値に各々割り当てられている2つの量子化パラメータの平均を用いて、前記第2係数値を量子化する。
例えば、三次元データ符号化装置は、プロセッサと、メモリとを備え、プロセッサは、メモリを用いて、上記の処理を行う。
本実施の形態に係る三次元データ復号装置は、図142に示す処理を行う。三次元データ復号装置は、ビットストリームに含まれる複数の量子化値を逆量子化することで複数の係数値を算出し(S9031)、前記複数の係数値から、点群データに含まれる複数の三次元点の複数の属性情報を算出し(S9032)、前記複数の属性情報のうちの少なくとも一部の属性情報は、直方体形状を有する複数の三次元空間のうち、当該属性情報を含む三次元点が属する三次元空間毎に分類されることで、複数のグループのいずれか1つに属し、前記逆量子化では、前記複数の量子化値を、当該量子化値が対応する係数値の算出の基になった1以上の属性情報が属する1以上のグループ用の1以上の量子化パラメータ、または、所定の量子化パラメータを用いて逆量子化する。これによれば、当該三次元データ復号方法は、1以上のグループ用の1以上の量子化パラメータ、または、所定の量子化パラメータを用いて逆量子化することができるので、適切に復号を行える。
例えば、前記複数の三次元空間の各々は、当該三次元空間の原点と、当該三次元空間の長さ、幅および奥行とで示される。
例えば、前記複数の係数値の算出(S9031)では、前記複数の属性情報の各々を高周波成分と低周波成分とに分けて階層化した階層構造を生成することで、前記複数の係数値を算出する。
例えば、前記複数の係数値の算出(S9031)では、第1階層に属する2つの第1係数値を用いて、前記第1階層よりも1つ上の第2階層に属する第2係数値を算出し、前記逆量子化では、前記2つの第1係数値に各々割り当てられている2つの量子化パラメータの平均を用いて、前記第2係数値を逆量子化する。
例えば、三次元データ復号装置は、プロセッサと、メモリとを備え、プロセッサは、メモリを用いて、上記の処理を行う。
(実施の形態12)
以下、量子化パラメータについて説明する。
点群データの特性および位置に基づき点群データを分割するために、スライスおよびタイルが用いられる。ここで、ハードウェアの制限、および、リアルタイム処理の要件により、それぞれの分割された点群データに求められる品質が異なる場合がある。例えば、オブジェクト毎にスライスに分割して符号化する場合、重要でないオブジェクトを含むスライスデータは、それほど重要でないため、量子化することにより解像度(品質)を落とすことができる。一方、重要なスライスデータは量子化の値を低い値に設定することで高い解像度(品質)とすることができる。このような量子化値のコントロールを可能とするために量子化パラメータが用いられる。
ここで、量子化の対象となるデータと、量子化に用いられるスケールと、量子化によって算出される結果である量子化データとは、以下の(式S1)と(式S2)で表される。
量子化データ=データ/スケール (式S1)
データ=量子化データ*スケール (式S2)
三次元データ符号化装置は、スケールを用いてデータを量子化する、つまり、式S1を用いる処理を行うことで、データが量子化された量子化データを算出する。
三次元データ復号装置は、スケールを用いて量子化データを逆量子化する、つまり、式S2を用いる処理を行うことで、量子化データが逆量子化されたデータを算出する。
また、スケールと、量子化値(QP(Quantization Parameter)値)とは、以下の(式S3)と(式S4)で表される。
量子化値(QP値)=log(スケール) (式S3)
量子化値(QP値)=デフォルト値(基準値)+量子化デルタ(差分情報) (式S4)
また、これらのパラメータを総称して量子化パラメータ(Quantization Parameter)と呼ぶ。
例えば、量子化値は、デフォルト値を基準とした値であり、デフォルト値に量子化デルタ(デルタQP値)を加算することで算出されてもよい。量子化値がデフォルト値よりも小さい値である場合には、量子化デルタは負の値となる。量子化値がデフォルト値よりも大きい値である場合には、量子化デルタは正の値となる。量子化値がデフォルト値と等しい場合には、量子化デルタは0となる。量子化デルタが0である場合、量子化デルタは、なくてもよい。
次に、量子化パラメータの伝送方法について説明する。
図143は、属性情報の符号化に用いられる量子化パラメータの伝送方法について説明するための図である。図143の(a)は、フレーム中におけるデータ(スライス)のQP値の関係の一例を示す図である。
属性情報は、第1の色を示す第1色情報と、反射率を示す反射率情報とを含む。属性情報は、さらに、第2の色を示す第2色情報を含んでいてもよい。属性情報は、第1色情報、第2色情報、及び、反射率情報のうちの少なくとも1つを含んでいればよい。
第1色情報は、輝度(ルマ)Yと色差(クロマ)Cb、Crとで示される。図143の(a)におけるQY1は、第1の色の輝度Y1の符号化に用いられるQP値を示す。QY1は、第1の色の輝度Y1を量子化するために用いられる量子化パラメータである。
また、第1の色の色差Cb1、Cr1の符号化に用いられるQP値であるQCb1、QCr1は、それぞれ、QY1と、その差分を示すΔ(QCb1,QY1)、Δ(QCr1,QY1)とを用いて導出される。つまり、QCb1は、基準値(絶対値)としてのQY1に、差分値(相対値)としてのΔ(QCb1,QY1)を加算することで導出される。QCb1は、第1の色の色差Cb1を量子化するために用いられる量子化パラメータである。また、QCr1は、基準値(絶対値)としてのQY1に、差分値(相対値)としてのΔ(QCr1,QY1)を加算することで導出される。QCr1は、第1の色の色差Cr1を量子化するために用いられる量子化パラメータである。
なお、QCb1およびQCr1は、互いに同じ値が用いられてもよく、共通する値が用いられてもよい。共通する値が用いられる場合、QCb1およびQCr1の一方が用いられればよいため、他方はなくてもよい。
また、スライスデータにおける第1の色の輝度Y1Dの符号化に用いられるQP値であるQY1Dは、QY1と、その差分を示すΔ(QY1D,QY1)とを用いて導出される。つまり、QY1Dは、基準値(絶対値)としてのQY1に、差分値(相対値)としてのΔ(QY1D,QY1)を加算することで導出される。QY1Dは、第1の色の輝度Y1Dを量子化するために用いられる量子化パラメータである。スライスデータにおける第1の色の輝度Y1Dは、サブ空間に含まれる1以上の三次元点の輝度の一例である。
同様に、スライスデータにおける第1の色の色差Cb1D、Cr1Dの符号化に用いられるQP値であるQCb1D、QCr1Dは、それぞれ、QCb1、QCr1と、その差分を示すΔ(QCb1D,QCb1)、Δ(QCr1D,QCr1)とを用いて導出される。つまり、QCb1Dは、基準値(絶対値)としてのQCb1に、差分値(相対値)としてのΔ(QCb1D,QCb1)を加算することで導出される。QCb1Dは、スライスデータにおける第1の色の色差Cb1Dを量子化するために用いられる量子化パラメータである。また、QCr1Dは、基準値(絶対値)としてのQCr1に、差分値(相対値)としてのΔ(QCr1D,QCr1)を加算することで導出される。QCr1Dは、スライスデータにおける第1の色の色差Cr1Dを量子化するために用いられる量子化パラメータである。スライスデータにおける第1の色の色差Cb1D、Cr1Dは、サブ空間に含まれる1以上の三次元点の第1色差の一例である。
第1の色におけるQP値の関係は、第2の色にも同様のことが言えるため、説明を省略する。
図143におけるQRは、反射率Rの符号化に用いられるQP値を示す。QRは、反射率Rを量子化するために用いられる量子化パラメータである。スライスデータにおける反射率RDの符号化に用いられるQP値であるQRDは、QRと、その差分を示すΔ(QRD,QR)とを用いて導出される。つまり、QRDは、基準値(絶対値)としてのQRに、差分値(相対値)としてのΔ(QRD,QR)を加算することで導出される。QRDは、スライスデータにおける反射率RDを量子化するために用いられる量子化パラメータである。スライスデータにおける反射率RDは、サブ空間に含まれる1以上の三次元点の反射率の一例である。
なお、データQPとフレームQPとの値が同一の値であるような場合は、差分値を0としてもよいし、差分値を送出しないことにより0とみなすとしてもよい。
このように、フレーム中におけるスライス毎の属性情報を符号化するのに用いられるQP値を算出することができる。
複数の属性情報のそれぞれは、1以上の階層のいずれかに属する。1以上の階層を含む階層構造は、例えば、LoD(Level of Detail)の階層構造であってもよい。LoDの階層構造は、上位階層の方が下位階層よりも各階層に属する三次元点間の距離が長くなるように、各階層に複数の三次元点を分類することで生成される階層構造である。このため、各属性情報は、当該属性情報を有する三次元点が属する階層に属する。
また、階層構造は、例えば、RAHT(Region Adaptive Hierarchical Transform)の階層構造であってもよい。RAHTの階層構造は、複数の三次元点の複数の属性情報の各々を高周波成分と低周波成分とに分けて階層化することで生成される階層構造である。つまり、1以上の階層のいずれかに属する属性情報は、高周波成分及び低周波成分を含む。
なお、階層構造は、1つの階層を含む構造であってもよいし、複数の階層を含む構造であってもよい。以下では、複数の階層を含む階層構造を例にして説明する。
図143の(b)は、1つのスライス中における複数の階層のQP値の関係の一例を示す図である。
図143の(b)におけるS1(SliceQP)は、スライスデータにおける属性情報の符号化に用いられるQP値である。ここで、スライスデータにおける属性情報は、例えば、スライスデータにおける第1の色情報である輝度Y1D、色差Cb1D、Cr1Dを含む。また、スライスデータにおける属性情報は、例えば、スライスデータにおける反射率情報である反射率RDを含む。S1は、図143の(a)におけるQY1D、QCb1D、及び、QCr1Dを含む。
各階層に属する三次元点の属性情報の符号化に用いられるQP値であるL1、L2及びL3は、それぞれ、S1と、その差分を示すΔ(L1,S1)、Δ(L2,S1)及びΔ(L3,S1)とを用いて導出される。つまり、L1は、基準値(絶対値)としてのS1に、差分値(相対値)としてのΔ(L1,S1)を加算することで導出される。L2は、基準値(絶対値)としてのS1に、差分値(相対値)としてのΔ(L2,S1)を加算することで導出される。L3は、基準値(絶対値)としてのS1に、差分値(相対値)としてのΔ(L3,S1)を加算することで導出される。L1は、複数の階層のうちの第1階層に属する属性情報の符号化に用いられるQP値である。L2は、複数の階層のうちの第2階層に属する属性情報の符号化に用いられるQP値である。L3は、複数の階層のうちの第3階層に属する属性情報の符号化に用いられるQP値である。なお、複数の階層は、第1階層、第2階層、及び、第3階層を含む例で説明したが、2以上の階層を含んでいれば3つの階層を含むことに限られない。
複数の三次元点のそれぞれは、1以上の領域のいずれかに属する。1以上の領域は、複数の三次元点が含まれる三次元空間上の三次元的な領域である。1以上の領域は、1つの領域であってもよいし、複数の領域であってもよい。複数の三次元点のそれぞれは、1つの領域に属してもよいし、複数の領域のいずれかに属してもよい。以下では、複数の三次元点のそれぞれが複数の領域のいずれかに属する例について説明する。なお、複数の領域は、互いに重なる部分を有していてもよいし、互いに重ならずに独立していてもよい。
各三次元点のQP値は、当該三次元点の属性情報の符号化に用いられるQP値である。図143の(c)に示されるように、複数の三次元点は、複数の領域R1~Rnum_regionに分類される場合を考える。複数の領域R1~Rnum_regionは、それぞれ、複数のデルタQP値Q1~Qnum_regionに対応している。複数のデルタQP値Q1~Qnum_regionは、各デルタQP値が対応する領域に属する三次元点の属性情報の符号化に用いられる。つまり、処理対象の属性情報は、当該属性情報を有する三次元点の位置に基づいて特定された当該三次元点が属する領域に対応付けられているデルタQP値を用いて符号化される。
このように、処理対象の属性情報は、1以上の階層のいずれかに属し、当該属性情報を有する三次元点は1以上の領域のいずれかに属する。この処理対象の属性情報の符号化に用いられるQP値は、当該属性情報を有する三次元点が属するスライスに定められたQP値S1に、当該属性情報の階層に対応付けられたデルタQP値と、当該属性情報を有する三次元点が属する領域に対応付けられたデルタQP値とを加算することで導出される。
図144は、処理対象の属性情報に適用するQP値を導出するフローチャートの一例である。このフローチャートで示される処理は、三次元データ符号化装置による属性情報の符号化に用いられてもよいし、三次元データ復号装置による符号化された属性情報の復号に用いられてもよい。以下では、三次元データ符号化装置がこの処理を行う場合について説明するが、三次元データ復号装置がこの処理を行う場合も同様に説明できる。
三次元データ符号化装置は、フレーム単位のパラメータセットを解析し、フレーム単位のQP値を導出する(S9201)。フレーム単位のQP値(FrameQP)は、QY1と、その差分を示すΔ(QCb1,QY1)、Δ(QCr1,QY1)とを用いて導出される。QY1と、Δ(QCb1,QY1)と、Δ(QCr1,QY1)とは、フレーム毎のパラメータセットに格納されている。
なお、図144において、FrameQPは、フレーム単位のQP値でありクロマCbのQP値である。FramePS.QY1は、第1の色の輝度Y1の符号化に用いられるQP値を示す。FramePS.Qcb1は、第1の色の色差Cb1の符号化に用いられるQP値である。なお、同様に、クロマCrのQP値も上記の(式S4)と同様に算出することができる。
次に、三次元データ符号化装置は、スライス毎に、各スライスヘッダに含まれるデルタQP値を用いて、スライス単位のQP値を導出する(S9202)。三次元データ符号化装置は、フレーム単位のパラメータセットに、スライス単位のQP値が与えられていることが示されている場合、ステップS9202の処理を行ってもよい。この場合は、例えば、フレーム単位のパラメータセットに含まれる識別情報(FramePS.slice_qp_present_flag)が、スライス単位のQP値が与えられていることを示す場合である。スライス単位のQP値、例えば、i番目のスライスに適用されるQP値(SliceQP[i])は、FrameQPと、その差分を示すデルタQP値(例えば、Δ(QY1D,QY1)、Δ(QCb1D,QCb1)、Δ(QCr1D,QCr1))とを用いて導出される。Δ(QY1D,QY1)、Δ(QCb1D,QCb1)、及び、Δ(QCr1D,QCr1)は、スライスヘッダに格納されている。
なお、図144において、deltaSliceQP[i]は、i番目のスライスヘッダに含まれるデルタQP値である。
次に、三次元データ符号化装置は、階層毎にスライスヘッダに含まれる階層毎のデルタQP値を用いて階層毎のQP値を導出する(S9203)。三次元データ符号化装置は、スライスヘッダに階層毎のQP値が与えられていることが示されている場合、ステップS9203の処理を行ってもよい。この場合は、例えば、スライスヘッダに含まれる識別情報(SliceHeader.delta_Layer_present_flag)が、階層毎のQP値が与えられていることを示す場合である。階層毎のQP値、例えば、i番目のスライスにおいてj番目の階層に適用されるQP値(LayerQP[i][j])は、SliceQP[i]と、その差分を示すデルタQP値(例えば、Δ(L1,S1)、Δ(L2,S1)、Δ(L3,S1))とを用いて導出される。Δ(L1,S1)、Δ(L2,S1)、及び、Δ(L3,S1)は、スライスヘッダに格納されている。
なお、図144において、deltaSliceQP[i][j]は、i番目のスライスヘッダにおけるj番目の階層に属する属性情報に適用されるデルタQP値である。
次に、三次元データ符号化装置は、スライスヘッダに含まれる領域毎のデルタQP値を用いて、所定の方法で、三次元点毎のデルタQP値を導出する(S9204)。三次元データ符号化装置は、スライスヘッダに領域毎のQP値が与えられていることが示されている場合、ステップS9204の処理を行ってもよい。この場合は、例えば、スライスヘッダに含まれる識別情報(SliceHeader.additional_delta_QP_present_flag)が、領域毎のQP値が与えられていることを示す場合である。
なお、図144において、RegionQP[i][j][p]は、i番目のスライスヘッダにおけるj番目の階層に属する、p番目の三次元点に適用されるQP値である。deltaRegionQP[i][p]は、i番目のスライスヘッダにおける、p番目の三次元点が属する領域に対応するデルタQP値である。
図145は、三次元点毎のQP値の決定方法のフローチャートである。このフローチャートで示される処理は、三次元データ符号化装置による属性情報の符号化に用いられてもよいし、三次元データ復号装置による符号化された属性情報の復号に用いられてもよい。以下では、三次元データ符号化装置がこの処理を行う場合について説明するが、三次元データ復号装置がこの処理を行う場合も同様に説明できる。
三次元データ符号化装置は、複数の三次元点のそれぞれについて処理を実行する(S9211)。具体的には、三次元データ符号化装置は、QP値の決定方法の処理対象にまだなっていない未処理の複数の三次元点のうちから処理対象となる三次元点を1つ選択する。
次に、三次元データ符号化装置は、選択された1つの三次元点について、複数の領域のそれぞれについて処理を実行する(S9212)。具体的には、三次元データ符号化装置は、選択された1つの三次元点に対する処理において、未処理の複数の領域のうちから処理対象となる領域を1つ選択する。
次に、三次元データ符号化装置は、処理対象の1つの三次元点が、処理対象の1つの領域に含まれるか否かを判定する(S9213)。
三次元データ符号化装置は、処理対象の1つの三次元点が、処理対象の1つの領域に含まれると判定された場合(S9213でYes)、処理対象の1つの三次元点の属性情報の符号化に、処理対象の1つの領域に割り当てられているQP値を適用すると決定する(S9214)。
三次元データ符号化装置は、ステップS9214が終了した後、又は、処理対象の1つの三次元点が、処理対象の1つの領域に含まれていないと判定された場合(S9213でNo)、複数の領域の全てについてステップS9213の判定が行われたか否かを判定する(S9215)。
三次元データ符号化装置は、複数の領域の全てについてステップS9213の判定が行われていないと判定した場合(S9215でNo)、ステップS9212に戻る。
三次元データ符号化装置は、複数の領域の全てについてステップS9213の判定が行われたと判定した場合(S9215でYes)、ステップS9216に進む。
三次元データ符号化装置は、ステップS9214で決定された領域のQP値を用いて、処理対象の三次元点に適用するQP値を所定の方法を用いて導出する(S9216)。ここで所定の方法は、ステップS9216では、該当する領域が複数ある場合、複数の領域の複数のQP値の最小値、最大値、平均値、又は、加算値を、処理対象の三次元点に適用するQP値として導出することである。また、該当する領域が複数ある場合、領域境界からの距離に基づきQP値に重みを付けてもよい。例えば、領域境界において設定されるQP値を複数の領域の複数のQP値の平均値とし、領域境界から離れた位置に対して設定されるQP値を領域境界から離れるほど離れた位置の領域のQP値に近づくように重み付けしてもよい。これにより、領域境界において、なだらかなQP値の変更が可能となり、属性情報の符号化における予測精度を向上させることができる。なお、該当する領域が1つの場合、当該1つの領域のQP値を、処理対象の三次元点に適用するQP値として導出する。
三次元データ符号化装置は、複数の三次元点の全てについてステップS9212~S9216の処理が行われたか否かを判定する(S9217)。
三次元データ符号化装置は、複数の三次元点の全てについてステップS9212~S9216の処理が行われていないと判定した場合(S9217でNo)、ステップS9211に戻る。
三次元データ符号化装置は、複数の三次元点の全てについてステップS9212~S9216の処理が行われたと判定した場合(S9217でYes)、スライス毎のデルタQP値、階層毎のデルタQP値、及び、三次元点毎の領域に関わるデルタQP値を用いて、三次元点毎のQP値を決定する(S9218)。なお、ステップS9218を三次元データ復号装置が行う場合、三次元データ復号装置は、スライス毎のデルタQP値、階層毎のデルタQP値、及び、三次元点毎の領域に係るデルタQP値を用いて、三次元点の符号化された属性情報の復号に用いるQP値を決定する。
図146は、三次元データ符号化装置による符号化方法のフローチャートの一例である。
三次元データ符号化装置は、品質を変化させる領域を決定する(S9221)。
次に、三次元データ符号化装置は、図144の三次元点毎のQP値の決定方法を用いて、三次元点毎の領域に関わるQP値を決定する(S9222)。
次に、三次元データ符号化装置は、三次元点毎のQP値を用いて、各三次元点の属性情報を符号化する(S9223)。
次に、三次元データ符号化装置は、QP値に関わるメタデータを生成し、メタデータを含むビットストリームを生成する(S9224)。生成されたビットストリームは、伝送される。QP値に関わるメタデータは、QP値を算出するために用いられる基準値と、差分値とを含む。
図147は、三次元データ復号装置による復号方法のフローチャートの一例である。
三次元データ復号装置は、メタデータを復号し、QP値に関わるメタデータを取得する(S9231)。三次元データ復号装置は、ビットストリームを取得することで、符号化された複数の属性情報、及び、メタデータを取得する。
次に、三次元データ復号装置は、図144の三次元点毎のQP値の決定方法を用いて、三次元点毎の領域に関わるQP値を決定する(S9232)。
次に、三次元データ復号装置は、三次元点毎のQP値を用いて、符号化された複数の属性情報を復号することで、複数の属性情報を取得する(S9233)。三次元データ復号装置は、三次元点毎のQP値を用いて、量子化された複数の属性情報を逆量子化することで、複数の属性情報を取得する。
なお、本実施の形態では、領域毎に属性情報の符号化におけるQP値を制御する(変更する)方法について説明したが、品質を制御したい領域毎にスライス又はタイルに分割し、スライス毎のQP値を制御する(変更する)方法を用いてもよいし、その他の方法(例えば以降の説明)を用いて領域毎の品質を制御してもよい。また、様々な方法のいずれを用いるかを、予め符号化効率や品質を算出して決定してもよいし、適応的に切り替えてもよい。
次に、スライス毎に領域毎のQP値が設定される場合の例について説明する。
上記実施の形態では、タイル又はスライス分割を適用しない場合を例に、領域毎の品質制御の例を説明したが、タイル又はスライス分割を適用する場合には、スライス毎に、スライス内の領域を設定することが可能である。例えば図148に示すように、三次元点群をスライスAとスライスBとに分割し、スライスAでは、スライスAの領域Aの三次元点群と領域Bの三次元点群とで独立して品質制御され、スライスBでは、スライスBの領域Cの三次元点群と領域Dの三次元点群とで独立して品質制御されてもよい。品質制御される領域数、又は、品質制御されるか否かは、スライス毎に独立して設定されてもよい。
領域の原点座標は、領域の属するスライスの原点を基準とした座標に設定されてもよい。これにより、スライスヘッダに格納する領域の原点座標、及び、当該領域のサイズを示すサイズ情報が正の値に設定される。よって、領域を示す領域情報の情報量を削減できる。領域情報は、領域の原点座標、及び、サイズ情報を含む。
例えば、図150に示すように、三次元点群の点群データを分割後に領域を設定する場合のように、分割後のスライスの原点に基づいた座標系において、領域の原点が必ず正の値となるような状況であれば、そのまま領域情報を設定することができる。
一方、図151に示すように、三次元点群の点群データを分割前に領域を設定し、領域情報が分割前の座標系となっている場合には、分割前の座標系から分割データ毎の座標系に合わせるために、座標系の変化のベクトル分だけ座標をシフトする。具体的にはスライスの原点の値を減算する。図149に示す例は、点群データがスライスA及びスライスBに分割される前に、領域Aと領域Bとが設定される例である。
なお、領域の原点座標は、スライス原点から負の位置に設定されてもよい。
次に、全スライスで共通に領域毎のQP値が設定される場合の例について説明する。
本実施の形態では、スライス毎に、領域を設定できるシンタックス構成を例に説明したが、全てのスライスで共通な領域が設定されてもよい。この場合、領域情報は、スライス毎のヘッダではなく、シーケンスパラメータセット(SPS)、属性パラメータセット(APS)などの上位のメタデータ(フレーム毎)に格納されてもよい。領域情報は、例えば、複数の領域の数を示す領域数、領域毎の原点、領域毎のサイズ、領域毎のQP値を含む。また、領域情報は、全スライスで共通であるため、スライスへの分割前の点群データの原点を基準として、各領域の原点が表されてもよい。
スライス毎の処理においては、各領域の原点の基準をスライスへの分割前の点群データにおける所定の基準から、分割後のスライス毎の点群データの所定の基準に変換してから処理が実行されてもよい。
なお、領域情報が、複数のスライスで共通に設定されるか、各スライスで独立して設定されるかは、目的に応じて切り替えられてもよい。この切り替えのための切り替えフラグはSPSやAPSなどに格納されてもよい。
複数の領域は、フレーム毎に設定されてもよいし、複数のフレームで共通して設定されてもよい。複数の領域が複数のフレームで共通して設定される場合は、領域情報は、複数のフレームで共通するメタデータ(例えばSPS)に格納される。
上記実施の形態では、QP値を変更することで領域毎の品質を制御する例について説明したが、QP値を用いて品質を制御することに限らない。領域毎の品質制御方法として、QP値以外を用いる場合について説明する。これまでの例では、量子化により値を変更し情報量を削減する方法であったが、クリップにより値を変更する方法を用いてもよいし、その他の方法を用いてもよい。
量子化により値を変更する処理の例では、符号化処理で算出される値と、復号処理で算出される値とは、下記の式で算出される。
(符号化)
Value=Value/量子化値
(復号)
Value=Value*量子化値
クリップにより値を変更する処理の例では、符号化処理で算出される値と、復号処理で算出される値とは、下記の式で算出される。
(符号化)
Value=if(Value<threshold)Value=0
(復号)
処理なし
クリップにより値を変更する処理は、量子化の場合と同様であり、予め領域毎のクリップする閾値を定め、三次元点毎に、各三次元点が領域に含まれるか否かを判定しながら、領域毎の閾値を用いて最終的な閾値を導出する。この処理は、例えば、「三次元点毎のQP値の決定方法」のS9214及びS9216においてQP値を閾値に読み替えることで説明することができる。ここで、ステップS9216では、該当する領域が複数ある場合、複数の領域の複数の閾値の最小値、最大値、平均値、又は、加算値を、処理対象の三次元点に適用する閾値として導出することである。また、該当する領域が複数ある場合、領域境界からの距離に基づき閾値に重みを付けてもよい。例えば、領域境界において複数の領域の複数の閾値の平均値とし、領域境界から離れるほど離れた位置の領域の閾値に近づくように重み付けしてもよい。これにより、領域境界において、なだらかな閾値の変更が可能となり、属性情報の符号化における予測精度を向上させることができる。なお、閾値は、制御したいオブジェクトに応じて決定されてもよいし、属性情報の符号化方法又は三次元点群全体の量子化値に基づいた値に設定されてもよい。
以上のように、本実施の形態の一態様に係る三次元データ符号化装置は、図152に示す処理を行う。三次元データ符号化装置は、パラメータを用いて複数の三次元点の複数の属性情報を符号化する(S9241)。三次元データ符号化装置は、符号化された前記複数の属性情報、及び、前記パラメータを含むビットストリームを生成する(S9242)。前記複数の属性情報のそれぞれは、1以上の階層のいずれかに属する。前記複数の三次元点のそれぞれは、1以上の領域のいずれかに属する。前記パラメータは、前記符号化の対象となる属性情報が属する階層、及び、前記符号化の対象となる属性情報を有する三次元点が属する領域に応じて定められる。前記ビットストリームに含まれる前記パラメータは、所定の基準値と、前記階層毎に定められる第1差分値と、前記領域毎に定められる第2差分値とを含む。
これによれば、三次元データ符号化方法は、ビットストリームにおいて、パラメータを所定の基準値と、階層毎に定められる第1差分値と、領域毎に定められる第2差分値とで示すため、符号化効率を向上できる。
例えば、前記複数の属性情報のそれぞれは、さらに、1以上のスライスのいずれかに属する。前記パラメータは、前記符号化の対象となる属性情報が属するスライスに応じて定められる。前記ビットストリームに含まれる前記パラメータは、さらに、前記スライス毎に定められる第3差分値を含む。
これによれば、三次元データ符号化方法は、ビットストリームにおいて、パラメータを所定の基準値と、階層毎に定められる第1差分値と、領域毎に定められる第2差分値と、前記スライス毎に定められる第3差分値で示すため、符号化効率を向上できる。
例えば、前記複数の属性情報のそれぞれは、さらに、1以上のフレームのいずれかに属する。前記パラメータは、前記符号化の対象となる属性情報が属するフレームに応じて定められる。前記ビットストリームに含まれる前記パラメータは、さらに、前記フレーム毎に定められる前記第4差分値を含む。
これによれば、三次元データ符号化方法は、ビットストリームにおいて、パラメータを所定の基準値と、階層毎に定められる第1差分値と、領域毎に定められる第2差分値と、前記フレーム毎に定められる前記第4差分値で示すため、符号化効率を向上できる。
例えば、前記1以上の領域のうちの第1領域は、前記1以上のスライスのうちの第1スライスに属する。前記第1領域の原点座標は、前記第1スライスの原点座標を基準とした座標である。
このため、第1領域の原点座標を、第1スライスの原点座標とその差分値とで示すため、符号化効率を向上できる。
例えば、三次元データ符号化装置は、プロセッサと、メモリとを備え、プロセッサは、メモリを用いて、上記の処理を行う。
また、本実施の形態に係る三次元データ復号装置は、図153に示す処理を行う。三次元データ復号装置は、ビットストリームを取得することで、符号化された複数の属性情報、及び、パラメータを取得する(S9251)。三次元データ復号装置は、前記パラメータを用いて前記符号化された複数の属性情報を復号する(S9252)。前記複数の属性情報は、複数の三次元点の属性情報である。前記複数の属性情報のそれぞれは、1以上の階層のいずれかに属する。前記複数の三次元点のそれぞれは、1以上の領域のいずれかに属する。前記パラメータは、前記符号化の対象となる属性情報が属する階層、及び、前記符号化の対象となる属性情報を有する三次元点が属する領域に応じて定められる。前記ビットストリームに含まれる前記パラメータは、所定の基準値と、前記階層毎に定められる第1差分値と、前記領域毎に定められる第2差分値とを含む。
このため、三次元データ復号方法は、三次元点の属性情報を正しく復号できる。
例えば、前記複数の属性情報のそれぞれは、さらに、1以上のスライスのいずれかに属する。前記パラメータは、前記復号の対象となる属性情報が属するスライスに応じて定められる。前記ビットストリームに含まれる前記パラメータは、さらに、前記スライス毎に定められる第3差分値を含む。
このため、三次元データ復号方法は、三次元点の属性情報を正しく復号できる。
例えば、前記複数の属性情報のそれぞれは、さらに、1以上のフレームのいずれかに属する。前記パラメータは、前記復号の対象となる属性情報が属するフレームに応じて定められる。前記ビットストリームに含まれる前記パラメータは、さらに、前記フレーム毎に定められる前記第4差分値を含む。
このため、三次元データ復号方法は、三次元点の属性情報を正しく復号できる。
例えば、前記1以上の領域のうちの第1領域は、前記1以上のスライスのうちの第1スライスに属する。前記第1領域の原点座標は、前記第1スライスの原点座標を基準とした座標である。
このため、三次元データ復号方法は、第1領域の原点座標を正しく復号できる。
例えば、三次元データ復号装置は、プロセッサと、メモリとを備え、プロセッサは、メモリを用いて、上記の処理を行う。
以上、本開示の実施の形態に係る三次元データ符号化装置及び三次元データ復号装置等について説明したが、本開示は、この実施の形態に限定されるものではない。
また、上記実施の形態に係る三次元データ符号化装置及び三次元データ復号装置等に含まれる各処理部は典型的には集積回路であるLSIとして実現される。これらは個別に1チップ化されてもよいし、一部又は全てを含むように1チップ化されてもよい。
また、集積回路化はLSIに限るものではなく、専用回路又は汎用プロセッサで実現してもよい。LSI製造後にプログラムすることが可能なFPGA(Field Programmable Gate Array)、又はLSI内部の回路セルの接続や設定を再構成可能なリコンフィギュラブル・プロセッサを利用してもよい。
また、上記各実施の形態において、各構成要素は、専用のハードウェアで構成されるか、各構成要素に適したソフトウェアプログラムを実行することによって実現されてもよい。各構成要素は、CPUまたはプロセッサなどのプログラム実行部が、ハードディスクまたは半導体メモリなどの記録媒体に記録されたソフトウェアプログラムを読み出して実行することによって実現されてもよい。
また、本開示は、三次元データ符号化装置及び三次元データ復号装置等により実行される三次元データ符号化方法又は三次元データ復号方法等として実現されてもよい。
また、ブロック図における機能ブロックの分割は一例であり、複数の機能ブロックを一つの機能ブロックとして実現したり、一つの機能ブロックを複数に分割したり、一部の機能を他の機能ブロックに移してもよい。また、類似する機能を有する複数の機能ブロックの機能を単一のハードウェア又はソフトウェアが並列又は時分割に処理してもよい。
また、フローチャートにおける各ステップが実行される順序は、本開示を具体的に説明するために例示するためのものであり、上記以外の順序であってもよい。また、上記ステップの一部が、他のステップと同時(並列)に実行されてもよい。
以上、一つまたは複数の態様に係る三次元データ符号化装置及び三次元データ復号装置等について、実施の形態に基づいて説明したが、本開示は、この実施の形態に限定されるものではない。本開示の趣旨を逸脱しない限り、当業者が思いつく各種変形を本実施の形態に施したものや、異なる実施の形態における構成要素を組み合わせて構築される形態も、一つまたは複数の態様の範囲内に含まれてもよい。