JP7627272B2 - 回転駆動装置 - Google Patents
回転駆動装置 Download PDFInfo
- Publication number
- JP7627272B2 JP7627272B2 JP2022542836A JP2022542836A JP7627272B2 JP 7627272 B2 JP7627272 B2 JP 7627272B2 JP 2022542836 A JP2022542836 A JP 2022542836A JP 2022542836 A JP2022542836 A JP 2022542836A JP 7627272 B2 JP7627272 B2 JP 7627272B2
- Authority
- JP
- Japan
- Prior art keywords
- drive device
- movable body
- rotary drive
- roller
- stator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
















Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K5/00—Casings; Enclosures; Supports
- H02K5/04—Casings or enclosures characterised by the shape, form or construction thereof
- H02K5/16—Means for supporting bearings, e.g. insulating supports or means for fitting bearings in the bearing-shields
- H02K5/173—Means for supporting bearings, e.g. insulating supports or means for fitting bearings in the bearing-shields using bearings with rolling contact, e.g. ball bearings
-
- D—TEXTILES; PAPER
- D03—WEAVING
- D03D—WOVEN FABRICS; METHODS OF WEAVING; LOOMS
- D03D47/00—Looms in which bulk supply of weft does not pass through shed, e.g. shuttleless looms, gripper shuttle looms, dummy shuttle looms
- D03D47/40—Forming selvedges
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/27—Rotor cores with permanent magnets
- H02K1/2706—Inner rotors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/08—Structural association with bearings
- H02K7/086—Structural association with bearings radially supporting the rotor around a fixed spindle; radially supporting the rotor directly
- H02K7/088—Structural association with bearings radially supporting the rotor around a fixed spindle; radially supporting the rotor directly radially supporting the rotor directly
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Textile Engineering (AREA)
- Permanent Magnet Type Synchronous Machine (AREA)
- Connection Of Motors, Electrical Generators, Mechanical Devices, And The Like (AREA)
Description
本発明は、複数のステータコア部に巻回したステータコイルを有する固定体部及び複数の磁極を配したロータマグネットを有する可動体部を備える回転駆動装置に関する。
一般に、自動織機等に使用される回転駆動装置(サーボモータ)は、回転開始,回転停止,回転速度切換,回転方向切換等の制御を、回転動作中に頻繁かつ高速応答で行う必要があるため、回転子(可動体部)の重量を軽量化することにより、できるだけ慣性モーメントを小さくすることが求められるとともに、糸を操る必要があることから固有の特殊構造も求められる。
従来、このような用途に用いられる回転駆動装置としては、特許文献1及び2に開示される織機用直接電磁駆動式回転耳組装置が知られている。特許文献1に開示される織機用直接電磁駆動式回転耳組装置は、耳組装置の比較的細幅な構造を可能にし、簡単な構造で安価に耳組装置に組み込むことができる適当な軸受装置をからみ織円板のために見出さなければならないとともに、その場合、駆動装置は、回転角測定系を装備し、さらに、電磁駆動装置、軸受装置及び回転角測定系を汚れに対して十分に遮蔽しなければならない課題の解決を目的としたものであり、具体的には、からみ織円板が電磁駆動装置の回転子である直接電磁駆動式回転耳組装置において、ころがり軸受の外レースがからみ織円抜に回転不能に固着され、回転子中心軸の周りに同軸に配設され、ころがり軸受の内レースを担持する1個のセンタリング装置が固定子ハウジングの中に設けたものである。
また、特許文献2に開示される織機用直接電磁駆動式回転耳組装置は、からみ織円板が直接電磁駆動装置の回転子であり、回転子と固定子の間に半径方向磁束と異なる磁束が該駆動装置に現れる細幅型の回転耳組装置の提供を目的としたものであり、具体的には、中心軸の周囲に対称に配設された2個の糸口を有し、第1及び第2のからみ織ボビンから供給されるからみ織糸を各糸口により案内する回転支承されたからみ織円板を有し、からみ織円板が電磁駆動装置の回転子をなし、固定子が織機と連結可能なハウジングの中に収容されている織機用直接電磁駆動式回転耳組装置において、回転子と固定子との間に軸方向磁束が存在するように構成したものである。
しかし、上述した従来の回転駆動装置(織機用直接電磁駆動式回転耳組装置)は、次のような問題点があった。
第一に、回転子は、金属製部品として大径に構成された専用のころがり軸受により支持されるため、回転子と一体に回転するころがり軸受における外レース等の一部の部品も大型化及び重量化する。したがって、回転子の軽量化により慣性モーメントをより小さくし、十分な高速応答性を確保する観点からは限界があるとともに、大型化及び重量化ゆえに、低コスト性及び省エネルギ性の面からも不利になるなど、これらの課題を解決する観点からは更なる改善の余地があった。
第二に、からみ織円板やマグネット等の構造要素を、ころがり軸受の外周面又は側面に配置する構造を採用するため、全体の構造が煩雑化するとともに、大型のころがり軸受を使用することから、装置全体の厚みが大きくなる。この結果、間隔が10〔mm〕程度の狭い空間等への設置要求に応えることができないなど、汎用性を高める観点からも更なる改善の余地があった。
本発明は、このような背景技術に存在する課題を解決した回転駆動装置の提供を目的とするものである。
本発明は、上述した課題を解決するため、複数のステータコア部2c…を一体に設けたステータ2及びステータコア部2c…に巻回したステータコイル3…を有する固定体部Mcと、この固定体部Mcに対向する複数の磁極を有するロータマグネット4及びこのロータマグネット4に付設したロータヨーク5を有する可動体部Mmを備えてなる回転駆動装置Mを構成するに際して、リング形に形成したロータヨーク5,及び複数の磁極をロータヨーク5の外周部5eの周方向Ffに沿って配したリング形のロータマグネット4を有する可動体部Mmと、リング形に形成したステータ2の内周部2iに、可動体部Mmの外周部Mmeに対向する複数のステータコア部2c…を周方向Ffに沿って所定間隔置きに配した固定体部Mcと、ステータ2に対して位置を固定し、かつローラ周面6f…を可動体部Mmの外周部Mme又は内周部Mmiに当接させることにより当該可動体部Mmを旋回自在に支持する複数の支持ローラ6…からなる可動体支持部Msとを備えてなることを特徴とする。
この場合、発明の好適な態様により、支持ローラ6には、ラジアル軸受6bを用いることが望ましい。この際、ラジアル軸受6bの構成に際しては、その全部,又は少なくとも外輪部6beを含む一部を、非磁性素材により形成してもよいし、或いは、全部を、磁性素材により形成してもよい。なお、磁性素材により形成する際には、ラジアル軸受6bの外周面に、非磁性素材により形成した別途のローラ被覆リング6brを一体に設けることもできる。一方、ロータマグネット4は、周方向Ffへ複数極に分割着磁した一体成型マグネットを用いることが望ましい。加えて、ロータヨーク5は、ロータマグネット4の厚みよりも薄く形成することが望ましい。また、固定体部Mcには、ステータ2の一端面2sを支持し、かつ可動体支持部Msを配設するリング形のベース部11を設けることが望ましい。これにより、固定体部Mcは、ベース部11に配設した支持ローラ6…を、複数のステータコア部2c…における一部のステータコア部2c…を除去して形成した収容空間12…に収容することにより、支持ローラ6…のローラ周面6f…を、可動体部Mmの外周部Mme又は内周部Mmiに当接させることができるとともに、他方、ベース部11に配設した支持ローラ6…のローラ周面6f…を、ステータ2に対して軸方向Fsにオフセットした位置で可動体部Mmの外周部Mme又は内周部Mmiに当接させることもできる。なお、支持ローラ6…のローラ周面6f…を、ステータ2に対して軸方向Fsにオフセットする場合には、可動体部Mmを軸方向Fsに延設することにより、外周部Mme又は内周部Mmiに支持ローラ6…のローラ周面6f…が当接するリング形の補助体部Mmsを一体に設けることが望ましい。一方、可動体部Mmには、支持ローラ6…の軸方向Fs相対変位を規制するストッパ部14p,14qを有するローラガイド13を設けることができ、このローラガイド13は、全部又は少なくとも一部を潤滑性合成樹脂素材により形成することができる。また、このローラガイド13には、ロータヨーク5の内周面5i及び/又はロータマグネット4の外周面4eを覆う被覆シート部15d,15uを設けることができ、このローラガイド13におけるロータマグネット4の外周面4eを覆う被覆シート部15uは非磁性金属素材により形成することもできる。加えて、複数のステータコア部2c…は、一部を、センサ16a,16bを支持するセンサ支持部2ca,2cbとして形成することができる。なお、可動体部Mmは、内周部Mmiより内方を中空部Saとして構成してもよいし、内周部Mmiより内方に、回転により特定の機能を生じさせる特定機能部Sb,Scとして構成してもよい。
このような構成を有する本発明に係る回転駆動装置Mによれば、次のような顕著な効果を奏する。
(1) 可動体部Mmは、リング形に形成したロータヨーク5,及び複数の磁極をロータヨーク5の外周部5eの周方向Ffに沿って配したリング形のロータマグネット4を有するため、可動体部Mmを旋回させる従来の大型ころがり軸受を排除することができる。これにより、可動体部Mmの大幅な軽量化を実現可能となり、高トルクに対応しつつ、慣性モーメントをより小さくすることができ、回転駆動装置Mにおける十分な高速応答性を確保できるとともに、低コスト性及び省エネルギ性をより高めることができる。
(2) リング形に形成したステータ2の内周部2iに、可動体部Mmの外周部Mmeに対向する複数のステータコア部2c…を周方向Ffに沿って所定間隔置きに配した固定体部Mc,及びステータ2に対して位置を固定し、かつローラ周面6f…を可動体部Mmの外周部Mme又は内周部Mmiに当接させることにより当該可動体部Mmを旋回自在に支持する複数の支持ローラ6…からなる可動体支持部Msを備えるため、全体の構造をより単純化できることに加え、特に、装置全体の薄型化を実現することができる。この結果、間隔が10〔mm〕程度、又はそれ以下となる狭い空間等への設置要求にも十分に応えることができるなど、汎用性及び発展性に優れた回転駆動装置Mとして提供することができる。
(3) 好適な態様により、支持ローラ6…として、ラジアル軸受6b…を用いれば、小型,軽量かつ様々なバリエーションを有するボールベアリング等の汎用部品を使用できるため、目的とする、より高性能な回転駆動装置Mを容易かつ低コストに得ることができる。
(4) 好適な態様により、ラジアル軸受6bを構成するに際し、全部,又は少なくとも外輪部6beを含む一部を、非磁性素材により形成すれば、ロータマグネット4とラジアル軸受6b間の磁気吸引力を排除又は低減できるため、ラジアル軸受6bの摺動部分における圧力を低減し、ラジアル軸受6bの耐久性を高めることができる。
(5) 好適な態様により、ラジアル軸受6bを構成するに際し、全部を、磁性素材により形成すれば、ロータマグネット4とラジアル軸受6b間の磁気吸引力を大きくすることができるため、ロータマグネット4とラジアル軸受6bの中立点位置で可動体部Mmを安定に回転(可動)させることができる。
(6) 好適な態様により、ラジアル軸受6bを構成するに際し、ラジアル軸受6bの外周面に、非磁性素材により形成した別途のローラ被覆リング6brを一体に設ければ、ロータマグネット4とラジアル軸受6b間の磁気吸引力を低減し、耐久性を向上させることができるとともに、特に、コギングを低減し、可動体部Mm回転時の振動を抑制することができる。
(7) 好適な態様により、ロータマグネット4に、周方向Ffへ複数極に分割着磁した一体成型マグネットを用いれば、複数の個別のマグネットを組付ける必要がないため、組付の容易化,均質化,強度アップ及び低コスト化を図ることができることに加え、特に、ロータマグネット4の薄型化が可能になるため、可動体部Mmの軽量化による慣性モーメントの更なる低減に寄与できる。
(8) 好適な態様により、ロータヨーク5を形成するに際し、ロータマグネット4の厚みよりも薄く形成すれば、ロータマグネット4の薄型化と併せ、複数極の分割着磁により磁気回路の飽和を回避しつつ軽量化を可能にするため、特に、比重の大きいロータヨーク5及びロータマグネット4の軽量最小化を実現できるなど、可動体部Mmを構成する際における最適な形態として実施できる。
(9) 好適な態様により、固定体部Mcに、ステータ2の一端面2sを支持し、かつ可動体支持部Msを配設するリング形のベース部11を設ければ、このベース部11は、固定体部Mcの機械的構成要素の一部として機能させることができるため、支持ローラ6…のみならず、回路基板等を配設するためのハウジング機能部や回転駆動装置Mを設置する際の取付機能部等として利用することができる。
(10) 好適な態様により、固定体部Mcを構成するに際し、ベース部11に配設した支持ローラ6…を、複数のステータコア部2c…における一部のステータコア部2c…を除去して形成した収容空間12…に収容することにより、支持ローラ6…のローラ周面6f…を、可動体部Mmの外周部Mme又は内周部Mmiに当接させるようにすれば、各支持ローラ6…は、軸方向Fsにおけるステータコア部2c…と同位置に配することができるため、各支持ローラ6…による径方向及び軸方向Fsへの無用な突出を回避して、可動体部Mm、更には回転駆動装置Mの合理的な薄型化を実現することができる。
(11) 好適な態様により、固定体部Mcを構成するに際し、ベース部11に配設した支持ローラ6…のローラ周面6f…を、ステータ2に対して軸方向Fsにオフセットした位置で可動体部Mmの外周部Mme又は内周部Mmiに当接させるようにすれば、支持ローラ6…を可動体部Mmの内周部Mmiに当接させ、或いは支持ローラ6…をステータ2に対して軸方向Fsに並べて配することが可能になるため、特に、回転駆動装置Mの薄型化が要求されない場合には、中空部を利用して各種機能を付加して構築した多様な回転駆動装置Mを提供することができる。
(12) 好適な態様により、可動体部Mmを構成するに際し、軸方向Fsに延設することにより、外周部Mme又は内周部Mmiに支持ローラ6…のローラ周面6f…が当接するリング形の補助体部Mmsを一体に設ければ、支持ローラ6…をステータ2に対して軸方向Fsに並べて配することができるため、ステータコア部2c…及びステータコイル3…の数量を増やすことにより、固定体部Mcの性能向上、更には可動体部Mmに対する支持の安定性及び円滑性を高めることができる。
(13) 好適な態様により、可動体部Mmを構成するに際し、支持ローラ6…の軸方向Fs相対変位を規制するストッパ部14p,14qを有するローラガイド13を設ければ、固定体部Mcに対する可動体部Mmの軸方向Fsへの相対的変位は、磁気力により規制されるも、外乱等の作用による機械的な変位が生じた場合には、ストッパ部14p,14qにより規制されるため、固定体部Mcに対する、いわば可動体部Mmの抜脱(脱落)を回避することができ、安定性及び信頼性をより高めることができる。
(14) 好適な態様により、ローラガイド13を形成するに際し、全部又は少なくとも一部を潤滑性合成樹脂素材により形成すれば、潤滑性合成樹脂素材の有する物性を利用できるため、可動体部Mmの円滑な回転(可動)を実現できるとともに、回転動作時(可動時)における振動及び騒音を効果的に吸収することができる。
(15) 好適な態様により、ローラガイド13を形成するに際し、ロータヨーク5の内周面5i及び/又はロータマグネット4の外周面4eを覆う被覆シート部15d,15uを設ければ、支持ローラ6…を可動体部Mmに当接する際には、被覆シート部15d又は15uに当接可能になるため、振動及び騒音の吸収効果、回転(可動)の円滑化をより有効化できるとともに、制御応答性もより高めることができる。
(16) 好適な態様により、ローラガイド13におけるロータマグネット4の外周面4eを覆う被覆シート部15uを非磁性金属素材により形成すれば、複数の単極マグネットを組合わせて構成するロータマグネット4にも対応できるとともに、可動体部Mmの外周部Mmeの平坦精度をより高めることができるため、支持ローラ6…に対する当接もより安定化させることができるとともに、ステータコア部2c…間とのギャップをより小さくして磁束密度を大きくすることができる。
(17) 好適な態様により、複数のステータコア部2c…を形成するに際し、一部を、センサ16a,16bを支持するセンサ支持部2ca,2cbとして形成すれば、センサ16a,16bの配設場所を、ステータ2の外部に確保する必要がなくなるため、各種センサ16a,16bを設ける場合であっても、大型化及び煩雑化を招く不具合を回避することができる。
(18) 好適な態様により、可動体部Mmを構成するに際し、内周部Mmiより内方を中空部Saとして構成すれば、特に、中空部(空間)Saを利用して糸等を供給する自動織機等に用いて最適となる。
(19) 好適な態様により、可動体部Mmを構成するに際し、内周部Mmiより内方に、回転により特定の機能を生じさせる特定機能部Sb,Scとして構成すれば、色分解された光を投射する光学装置(単板式プロジェクタ等)のRGBカラーフィルタや特殊用途における送風装置等、各種用途に利用及び応用できるなど、多様性及び発展性に優れた回転駆動装置Mとして提供することができる。
M:回転駆動装置,Mm:可動体部,Mme:可動体部の外周部,Mmi:可動体部の内周部,Mms:補助体部,Mc:固定体部,Mce:固定体部の外周部,Ms:可動体支持部,2:ステータ,2c…:ステータコア部,2ca:センサ支持部,2cb:センサ支持部,2i:ステータの内周部,2s:ステータの一端面,3…:ステータコイル,4:ロータマグネット,4e:ロータマグネットの外周面,5:ロータヨーク,5e:ロータヨークの外周部,5i:ロータヨークの内周面,6…:支持ローラ,6f…:ローラ周面,6b:ラジアル軸受,6be:ラジアル軸受の外輪部,6br:ローラ被覆リング,11:ベース部,12…:収容空間,13:ローラガイド,14p:ストッパ部,14q:ストッパ部,15d:被覆シート部,15u:被覆シート部,16a:センサ,16b:センサ,Ff:周方向,Fs:軸方向,Zp:一方側の側面領域,Zq:他方側の側面領域,Sa:中空部,Sb:特定機能部(フィルタ機能部),Sc:特定機能部(送風機能部)
次に、本発明に係る好適実施形態(第一実施例,第二実施例及び第三実施例)を挙げ、図面に基づき詳細に説明する。
まず、本実施形態の第一実施例に係る回転駆動装置Mの構成について、図1-図6を参照して説明する。
図1は回転駆動装置Mの機構部における全体構成を示す。回転駆動装置Mは、大別して固定体部Mc,可動体部Mm,及び可動体支持部Msにより構成する。
固定体部Mcは、全体をリング形に一体形成した図1に示すステータ2を備える。この場合、ステータ2を構成するに際し、ケイ素鋼板等の無方向性電磁鋼板を複数枚積層した積層体を用いれば、渦電流損を有効に低減することができる。ステータ2は、内周部2iに、周方向Ffに沿って所定間隔置きに配し、かつ中心方向に突出したT形状をなす複数のステータコア部2c…を一体に有する。ステータコア部2cにおける軸方向Fsの幅寸法は、後述するロータマグネット4の軸方向Fsの幅寸法に対して、概ね0.8倍、或いはそれ以下に選定することが望ましい。このように選定すれば、ロータマグネット4とステータコア部2c間の磁気吸引力を均等にできるため、後述する可動体部Mmを磁気中心位置で安定に保持することができる。
各ステータコア部2c…は、可動体部Mmの外周部Mmeに対して僅かなギャップを介して対向する。例示の場合、各ステータコア部2c…の相互間は、間隔を一定に設定した際に、ステータコア部2c…の極数が二十四極になるピッチ(間隔)を選定するとともに、連続する三つのステータコア部2c…を残存させ、次のステータコア部2cを除去することにより収容空間12として形成した配置パターンを順次形成する。これにより、ステータコア部2c…の全体を十八極に設定し、かつ周方向Ffに一定間隔おきに配される六つの収容空間12…を設けることができる。
また、各ステータコア部2c…の巻線部位には、エポキシ樹脂やポリイミド樹脂等のコーティングを施すことにより絶縁性を確保する。そして、ステータコア部2c…には、絶縁被覆導線を用いたコイルワイヤ(マグネットワイヤ)を巻回したステータコイル3…を付設する。なお、図1では、断面で示した部位においてのみステータコイル3…を表示し、他の部位ではステータコイル3…の表示を省略した。
さらに、固定体部Mcには、ステータ2よりも外径を大きく形成したリング形のベース部11を備える。このベース部11は、熱伝導性(放熱性)が高く、かつ非磁性を有するアルミニウム素材により一体形成することが望ましい。このベース部11は、図1及び図2に示すように、ステータ2の一端面2s(背面)に重ね、固定ネジ21…で固定することによりステータ2を支持するとともに、このベース部11の正面側には、後述する可動体支持部Msを配設する。なお、図面中、符号22は、ベース部11の内面に取付けた回路基板を示す。
このように、固定体部Mcに、ステータ2の一端面2sを支持し、かつ可動体支持部Msを配設するリング形のベース部11を設ければ、このベース部11は、固定体部Mcの機械的構成要素の一部として機能させることができるため、支持ローラ6…のみならず、回路基板等を配設するためのハウジング機能部や回転駆動装置Mを設置する際の取付機能部等として利用することができる。
一方、可動体支持部Msは、ステータ2に対して位置を固定した六つの支持ローラ6…により構成する。この場合、図2及び図3に示すように、各支持ローラ6…の中心を回動自在に支持するローラ支軸部6s…をベース部11に取付けるとともに、各支持ローラ6…を上述した六つの収容空間12…に収容可能となるように配設位置を選定し、さらに、支持ローラ6のローラ周面6fが可動体部Mmの外周部Mmeに当接するように支持ローラ6の外径等を選定する。可動体部Mmと可動体支持部Msを図6に抽出して示す。なお、六つの支持ローラ6…は、各ローラ周面6f…を、後述する可動体部Mmの外周部Mmeに当接させることにより当該可動体部Mmを旋回自在に支持する機能を有するため、ステータコア部2c…の数量等を考慮することにより、一般的には、三つ以上となる複数の支持ローラ6…により構成することができる。
各支持ローラ6…には、ボールベアリング又はローラベアリング等のラジアル軸受6b…を用いる。支持ローラ6としてラジアル軸受6bを用いれば、小型,軽量かつ様々なバリエーションを有するボールベアリング等の汎用部品を使用できるため、目的とする、より高性能な回転駆動装置Mを容易かつ低コストに得ることができる。
例示するラジアル軸受6bは、構成する素材として、全部を、磁性素材により形成した場合を示す。このように、ラジアル軸受6bの全部を、磁性素材により形成すれば、後述するロータマグネット4とラジアル軸受6b間の磁気吸引力を大きくすることができるため、ロータマグネット4とラジアル軸受6bの中立点位置で可動体部Mmを安定に回転(可動)させることができる。
一方、ラジアル軸受6bは、構成する素材により、各種のタイプを選択可能である。一例として、ラジアル軸受6bの、全部,又は少なくとも外輪部6be(図2参照)を含む一部を、非磁性素材により形成することも可能である。このように、全部,又は少なくとも外輪部6beを含む一部を、非磁性素材により形成すれば、ロータマグネット4とラジアル軸受6b間の磁気吸引力を排除又は低減できるため、ラジアル軸受6bの摺動部分における圧力を低減し、ラジアル軸受6bの耐久性を高めることができる。他方、後述する第二実施例のように、ラジアル軸受6bの外周面に、非磁性素材により形成した別途のローラ被覆リング6br(図9参照)を一体に設けることも可能である。このようなローラ被覆リング6brを設ければ、ロータマグネット4とラジアル軸受6b間の磁気吸引力を低減し、耐久性を向上させることができるとともに、特に、コギングを低減し、可動体部Mm回転時の振動を抑制することができる。
また、支持ローラ6(ラジアル軸受6b)をベース部11に取付けるに際しては、図2に示すように、取付ネジ23とカラー24によりローラ支軸部6sを構成し、カラー24を支持ローラ6の内孔に挿入するとともに、このカラー24に取付ネジ23を挿通させることによりベース部11に形成したネジ孔25に螺着することができる。
このように、固定体部Mcを構成するに際し、ベース部11に配設した支持ローラ6…を、複数のステータコア部2c…における一部のステータコア部2c…を除去して形成した収容空間12…に収容することにより、支持ローラ6…のローラ周面6f…を、可動体部Mmの外周部Mme又は内周部Mmiに当接させるようにすれば、各支持ローラ6…は、軸方向Fsにおけるステータコア部2c…と同位置に配することができるため、各支持ローラ6…による径方向及び軸方向Fsへの無用な突出を回避して、可動体部Mm、更には回転駆動装置Mの合理的な薄型化を実現することができる。
他方、可動体部Mmは、リング形に形成したロータヨーク5,及び複数の磁極をロータヨーク5の外周部5eの周方向Ffに沿って配したリング形のロータマグネット4を備えて構成する。
この場合、ロータマグネット4には、周方向Ffへ三十二極に分割着磁したリング形の一体成型マグネットを用いる。このようなロータマグネット4を用いれば、複数の個別のマグネットを組付ける必要がないため、組付の容易化,均質化,強度アップ及び低コスト化を図ることができることに加え、特に、ロータマグネット4の薄型化が可能になるため、可動体部Mmの軽量化による慣性モーメントの更なる低減に寄与できる。
また、ロータヨーク5は、鉄等の軟磁性材により全体をリング形に一体形成する。この場合、ロータヨーク5は、ロータマグネット4の厚みよりも薄く形成する。このように形成すれば、ロータマグネット4の薄型化と併せ、複数極の分割着磁により磁気回路の飽和を回避しつつ軽量化を可能にするため、特に、比重の大きいロータヨーク5及びロータマグネット4の軽量最小化を実現できるなど、可動体部Mmを構成する際における最適な形態として実施できる。そして、このロータヨーク5の外周部5eに対して、ロータマグネット4の内周部4iが当接するように組付けることができる。
さらに、可動体部Mmは、ローラガイド13を備える。例示のローラガイド13は、第一リング部材13aと第二リング部材13bの組合わせにより構成する。各リング部材13a,13bは、慣性モーメント及び摩耗負荷が小さく、かつ耐摩耗性に優れた潤滑性合成樹脂を用いてリング状となるようにそれぞれ一体成形したものである。なお、潤滑性合成樹脂としては、フッ素樹脂、キャストナイロン樹脂、超高分子量ポリエチレン樹脂、ポリアセタール樹脂等を用いることができる。
このように、ローラガイド13(第一リング部材13aと第二リング部材13b)を形成するに際し、全体を潤滑性合成樹脂素材により形成すれば、潤滑性合成樹脂素材の有する物性を利用できるため、可動体部Mmの円滑な回転(可動)を実現できるとともに、回転動作時(可動時)における振動及び騒音を効果的に吸収することができる。なお、例示の場合、ローラガイド13の全部(全体)を潤滑性合成樹脂素材により一体形成した場合を示したが、後述する第二実施例のように、一部を潤滑性合成樹脂素材により形成し、他の残部を他の素材(非磁性金属素材等)により形成することも可能である。
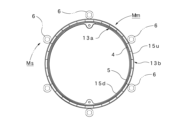
また、一方の第一リング部材13aは、図2に示すように、ロータヨーク5の内周面5iを覆うリング形の被覆シート部15dと、この被覆シート部15dの軸方向Fsにおける一方側の端縁に一体形成することにより、支持ローラ6…の軸方向Fs相対変位を規制するリング形のストッパ部14pにより構成する。被覆シート部15dは全体を一定厚に形成するとともに、ストッパ部14pは被覆シート部15dのラジアル方向外方へ延設し、ストッパ部14pの内側の面には、ロータヨーク5のエッジ部及びロータマグネット4のエッジ部が嵌合可能な凹形状部を形成する(図4参照)。なお、31,31は、ローラガイド部13の内周面における180〔゜〕離間した位置に設けた糸ガイドを示す。
他方の第二リング部材13bは、ロータマグネット4の外周面4eを覆うリング形の被覆シート部15uと、この被覆シート部15uの軸方向Fsにおける他方側の端縁に一体形成することにより、支持ローラ6…の軸方向Fs相対変位を規制するリング形のストッパ部14qにより構成する。被覆シート部15uは全体を一定厚に形成するとともに、ストッパ部14qは、被覆シート部15uのラジアル方向外方へ延設形成する。さらに、ストッパ部14qに対して、ラジアル方向内方には保持部13bhを一体形成し、この保持部13bhの内側の面に、ロータヨーク5のエッジ部及びロータマグネット4のエッジ部が嵌合可能な凹形状部を形成する(図4参照)。
これにより、可動体部Mm,固定体部Mc,可動体支持部Msを組付けた際には、図2に示すように、一方のストッパ部14pの先端は、支持ローラ6(ラジアル軸受6b)の外輪部6beの一方側の端面におけるラジアル方向中間部に位置し、他方のストッパ部14qの先端は、外輪部6beの他方側の端面におけるラジアル方向中間部に位置するため、支持ローラ6…の軸方向Fs相対変位を規制することができる。
このように、可動体部Mmを構成するに際し、支持ローラ6…の軸方向Fs相対変位を規制するストッパ部14p,14qを有するローラガイド部13を設ければ、固定体部Mcに対する可動体部Mmの軸方向Fsへの相対的変位は、磁気力により規制されるも、外乱等の作用による機械的な変位が生じた場合には、ストッパ部14p,14qにより規制されるため、固定体部Mcに対する、いわば可動体部Mmの抜脱を回避することができ、安定性及び信頼性をより高めることができる。
さらに、ローラガイド13を形成するに際して、ロータヨーク5の内周面5i及びロータマグネット4の外周面4eを覆う被覆シート部15d,15uを設ければ、支持ローラ6…を可動体部Mmに当接する際には、被覆シート部15d又は15uに当接可能になるため、振動及び騒音の吸収効果、回転(可動)の円滑化をより有効化できるとともに、制御応答性もより高めることができる。
他方、図2に示すように、正面側(ベース部11に対して反対側)の位置となる可動体部Mmの内周部Mmiから固定体部Mcの外周部Mceに至る一方側の側面領域Zpには、この側面領域Zpの全部(又は一部)を覆う、例えば、樹脂製シートを用いたリング形の防塵シート17sを貼付けた防塵カバー17を付設する。この場合、防塵シート17sは、樹脂製シートをローラガイド13等に軽く接触(摺動)させて空間を遮蔽するものであり、形成素材としては、ナイロン樹脂、ポリエチレンテレフタレート樹脂、フッ素樹脂、ポリウレタン樹脂等を用いることができる。なお、ローラガイド13等とは異なる素材を選定することにより耐摩耗性を向上させることが望ましい。また、光学センサを内蔵する場合には、遮光性を考慮することが望ましい。さらに、防塵カバー17は、熱伝導性(放熱性)が高く、かつ非磁性を有するアルミニウム素材により形成することが望ましい。
このような防塵カバー17を付設すれば、粉塵の発生しやすい場所で使用する用途、例えば、自動織機等に用いる場合であっても、糸屑等に基づいて発生する粉塵が防塵カバー17側から回転駆動装置Mの内部に侵入するのを防止できるため、回転駆動装置Mの信頼性及び耐久性の向上に寄与することができる。
一方、ベース部11の外側、即ち、可動体部Mmの内周部Mmiから固定体部Mcの外周部Mceに至る他方側の側面領域Zqには、この側面領域Zqの全部(又は一部)を覆う、例えば、樹脂製シートを用いたリング形の防塵シート18を付設する。この場合、形状を除き、上述した防塵シート17sと同様に形成することができる。防塵シート18を付設した回転駆動装置1の背面図を図5に示す。
したがって、このような防塵シート18を設ければ、粉塵が回転駆動装置Mの内部へベース部11側から侵入するのを防止できるため、回転駆動装置Mの信頼性及び耐久性の向上に寄与できるとともに、特に、防塵カバー17と組合わせることにより、より有効性の高い防塵効果を得ることができる。
次に、第一実施例に係る回転駆動装置Mの製造手順の一例について、図1-図6を参照しつつ図7に示すフローチャートに従って説明する。
まず、ロータヨーク5に、未着磁のロータマグネット4を固定する(ステップS1)。この場合、ロータヨーク5とロータマグネット4を位置決めし、接着剤等を用いて固定する(ステップS1)。そして、ロータヨーク5に固定した未着磁のロータマグネット4に対して着磁処理を行う(ステップS2)。
次いで、一体化されたロータヨーク5とロータマグネット4の一端側に対し、接着剤等を用いて第一リング部材13aの取付けを行う(ステップS3)。この場合、図4に示すように、ロータヨーク5及びロータマグネット4に対して、第一リング部材13aを矢印F1方向へ相対変位させ、被覆シート部15dをロータヨーク5の内側に挿入して仮想線の位置に組付けるとともに、ロータヨーク5及びロータマグネット4の一方の端部をストッパ部14pの内面に当接(嵌合)させる。
また、ロータヨーク5とロータマグネット4の他端側に対し、接着剤等を用いて第二リング部材13bの取付けを行う(ステップS4)。この場合も、第一リング部材13a側と同様、ロータヨーク5及びロータマグネット4に対して、第二リング部材13bを矢印F2方向へ相対変位させ、被覆シート部15uをロータマグネット4の外周面に対して仮想線で示すように組付けるとともに、ロータヨーク5及びロータマグネット4の他方の端部を第二リング部材13bの保持部13bhの内面に当接(嵌合)させる。これにより、可動体部Mm側における可動体中間アセンブリの組立が終了する(ステップS5)。
一方、ステータ2における各ステータコア部2c…に対してコイルワイヤを巻回する(ステップS6)。これにより、各ステータコア部2c…にステータコイル3…が付設される。また、ベース部11に回路基板22の取付けを行う(ステップS7)。そして、ベース部11に対してステータ2の取付けを行うとともに、ステータ2におけるステータコイル3…を回路基板22に対して半田付け等により接続する(ステップS8,S9)。これにより、固定体部Mc側における固定体中間アセンブリの組立が終了する(ステップS10)。
次いで、固定体中間アセンブリに対して可動体中間アセンブリを定位置にセッティングする(ステップS11)。そして、この状態において、六つの支持ローラ6…を各収容空間12…に収容し、ベース部11に対する支持ローラ6…の取付けを行う(ステップS12)。支持ローラ6の取付けは、図2に示すように、カラー24を支持ローラ6の内孔に挿入するとともに、このカラー24に取付ネジ23を挿通させることによりベース部11に形成したネジ孔25に螺着する。これにより、各支持ローラ6は、取付ネジ23とカラー24により構成されたローラ支軸部6sにより回動自在に支持される可動体支持部Msが構成されるとともに、各支持ローラ6…、即ち、ラジアル軸受6b…の外輪部6be…の両側に、ストッパ部14pと14qが配され、ラジアル軸受6b…により、可動体部Mmの軸方向Fsへの抜脱が阻止される。
この後、防塵カバー17に対して防塵シート17sを貼付けるとともに、ベース部11に対して防塵シート18の貼付けを行う(ステップS13,S14)。また、防塵シート17sを付設した防塵カバー17を、ベース部11に対して固定ネジ26…を用いて取付ける(ステップS15)。これにより、目的の回転駆動装置Mを得ることができる。
このように構成する回転駆動装置Mは、各ステータコイル3…及び図示を省略したセンサ類を、回路基板22を介して不図示の駆動コントローラに接続すれば、三相DCブラシレスモータとして回転駆動させることができる。この場合、各相におけるステータコイル3…は、公知のスター結線やデルタ結線等の結線方法により結線することができるとともに、特に、バイポーラ駆動方式を採用することによりトルクリップルを低減することができる。なお、三相を例示したが、二相,四相,五相等の各種多相方式により実施可能である。また、可動体部Mmを構成するに際しては、内周部Mmiより内方を中空部Saとして構成したため、特に、中空部(空間)Saを利用して糸等を供給する自動織機等に用いて最適となる。
よって、このような第一実施例に係る回転駆動装置Mによれば、基本構成として、リング形に形成したロータヨーク5,及び複数の磁極をロータヨーク5の外周部5eの周方向Ffに沿ってリング形に配したロータマグネット4を有する可動体部Mmと、リング形に形成したステータ2の内周部2iに、可動体部Mmの外周部Mmeに対向する複数のステータコア部2c…を周方向Ffに沿って所定間隔置きに配した固定体部Mcと、ステータ2に対して位置を固定し、かつローラ周面6f…を可動体部Mmの外周部Mme又は内周部Mmiに当接させることにより当該可動体部Mmを旋回自在に支持する複数の支持ローラ6…からなる可動体支持部Msとを備えて構成したため、可動体部Mmを旋回させる従来の大型ころがり軸受を排除することができる。これにより、可動体部Mmの大幅な軽量化を実現可能となり、高トルクに対応しつつ、慣性モーメントを、より小さくすることができ、回転駆動装置Mにおける十分な高速応答性を確保できるとともに、低コスト性及び省エネルギ性をより高めることができる。しかも、全体の構造をより単純化できることに加え、特に、装置全体の薄型化を実現することができる。この結果、間隔が10〔mm〕程度、又はそれ以下となる狭い空間等への設置要求にも十分に応えることができるなど、汎用性及び発展性に優れた回転駆動装置Mとして提供することができる。
次に、本実施形態の第二実施例に係る回転駆動装置Mについて、図8-図12を参照して説明する。
第二実施例は、第一実施例に対して基本的な構成は同じであるが、センサ系の構成を付加した点,及び細部構成の変更例を示した点が異なる。
まず、図11及び図12に示すように、ロータマグネット4の近傍に位置する回路基板22の上に、ロータマグネット4の磁極を検出する三つのホールセンサ(ホールIC)41,42,43を周方向Ffに沿って所定間隔おきに順次配設する。各ホールセンサ41,42,43はロータマグネット4の磁極位置を検出する機能を有し、この検出結果に基づいて、例示の場合、三相DCブラシレスモータとして作動させる際のスイッチング制御を行うことができる。なお、40はセンサヨークを示す。このセンサヨーク40は、ホールセンサ41,42,43の処理回路では正転時と逆転時に生じる磁極の位置検出誤差を最小限に低減するためのものであり、鉄等の軟磁性材で形成したプレートを回路基板22の裏側に取付けている。
また、第二実施例では、複数のステータコア部2c…を形成するに際し、一部を、センサ16a,16bを支持するセンサ支持部2ca,2cbとして形成した。この場合、第一実施例のステータ2に形成した六つの収容空間12…を三つの収容空間12…に変更するとともに、残りの収容空間12…に存在した三つステータコア部2c…を三つのセンサ取付部2ca,2cb,2ccに変更した。例示の場合、使用するセンサ取付部2ca,2cbは二つであるが、磁気回路のバランスを確保するため、ステータコア部2cの形状に類似した形状に形成した三つのセンサ取付部2ca,2cb,2ccを設けた。したがって、支持ローラ6…の数量は三つに変更した。
そして、一方のセンサ取付部2caの先端に、原点検出センサ16aを実装した基板16apを取付けるとともに、他方のセンサ取付部2cbの先端に、回転速度検出センサ16bを実装した基板16bpを取付けた。この場合、図12に示すように、側面から見た場合、原点検出センサ16aを軸方向Fsの端部寄りに配置するとともに、回転速度検出センサ16bは図12中仮想線で示すように、軸方向Fsの中央寄りに配置する。原点検出センサ16a及び回転速度検出センサ16bは、いずれもフォトリフレクタ(反射型光学センサ)を用いている。
このように、複数のステータコア部2c…を形成するに際し、一部を、センサ16a,16bを支持するセンサ支持部2ca,2cbとして形成すれば、センサ16a,16bの配設場所を、ステータ2の外部に確保する必要がなくなるため、各種センサ16a,16bを設ける場合であっても、大型化及び煩雑化を招く不具合を回避できる。
一方、図12に示すように、可動体部Mm側においては、原点検出センサ16aにより検出される黒マーク44を、前述したストッパ部14pの先端周面の所定位置に表示した。また、回転速度検出センサ16bにより検出される白黒の繰り返しが全周で180組となる連続パターン46を、ロータマグネット4の外周面に設けたリング形のシートガイド45の外面に表示した。このシートガイド45は、前述した被覆シート部15uを単独形成した形態と同じになる。
この場合、シートガイド45は、非磁性金属素材により形成したものであり、基本的には、ローラガイド13における第二リング部材13bの一部となる。即ち、ロータマグネット4の外周面4eを覆う被覆シート部15uを、非磁性金属素材により薄肉形成した。このように、被覆シート部15uを、非磁性金属素材を用いたシートガイド45により構成すれば、複数の単極マグネットを組合わせて構成するロータマグネット4にも対応できるとともに、可動体部Mmの外周部Mmeの平坦精度をより高めることができるため、支持ローラ6…に対する当接もより安定化させることができるとともに、ステータコア部2c…間とのギャップをより小さくして磁束密度を大きくすることができる。したがって、シートガイド45を形成するに際しては、厚さをできるだけ薄くすることが望ましい。
さらに、第二実施例において、符号32は、耐久性の高い別素材(セラミックス等)によりパイプ状に形成した糸ガイド部品を示す。第二実施例では、糸ガイド31を構成するに際し、孔を形成する部分に、この糸ガイド部品32を、インサート成形又は組付けることにより第一リング部材13aに埋設して構成した。
また、47は、支持ローラ6の周面6fに装着した樹脂製のローラ被覆リングを示す。このようなローラ被覆リング47を使用すれば、支持ローラ6の周面6f側が当接するシートガイド45を、例えば、樹脂素材に対して耐摩耗性に優れ、また、膨張係数の小さい、ローラガイド13の形成素材とは異なる樹脂素材又は金属素材により形成することもできる。加えて、磁気回路の影響を小さくすることも可能となる。
その他、図8-図12に示す第二実施例において、図1-図6に示した第一実施例と同一部分及び同一機能部分については、同一符号を付して、その構成を明確にするとともに、その詳細な説明は省略する。このような第二実施例であっても第一実施例と同様の作用効果を得ることができる。
次に、本実施形態の第三実施例に係る回転駆動装置Mについて、図13-図17を参照して説明する。
第三実施例は、第一実施例及び第二実施例に対して、基本極数を変更した点,固定体部Mcに配設する可動体支持部Ms(支持ローラ6…)の配設位置を変更した点,リング形の可動体部Mmの内周部Mmiより内方に、回転により特定の機能を生じさせる特定機能部Sb,Scを設けた点が異なる。
第三実施例は、図17に示すように、基本極数として、ステータコア部2c…を十二極に設定するとともに、ロータマグネット4を十六極に設定した。また、第三実施例では、支持ローラ6…を収容する収容空間12…は設けていない。
さらに、第三実施例では、固定体部Mcを構成するに際し、図15に示すように、可動体支持部Ms(支持ローラ6…)の軸方向Fsにおける配設位置を変更した。即ち、ベース部11に配設した支持ローラ6…のローラ周面6f…を、ステータ2に対して軸方向Fsにオフセットした位置で可動体部Mmの外周部Mmeに当接させるようにしたものである。したがって、支持ローラ6…とステータコア部2c…は、軸方向Fsにおいて前後に並んだ状態に配される。このように構成すれば、支持ローラ6…を可動体部Mmの内周部Mmiに当接させ、或いは支持ローラ6…をステータ2に対して軸方向Fsに並べて配することが可能になるため、特に、回転駆動装置Mの薄型化が要求されない場合には、中空部を利用して各種機能を付加した構成、即ち、多様な回転駆動装置Mを構築することができる。
このため、可動体部Mmを構成するに際しては、図15に示すように、可動体部Mmを構成するロータマグネット4を除き、ロータヨーク5と第一リング部材13aを軸方向Fsに延設するとともに、第二リング部材13bの位置を変更した。これにより、第一実施例における可動体部Mmに対して軸方向Fsへリング形の補助体部Mmsを付加した寸法となる。換言すれば、可動体部Mmを軸方向Fsに延設して第一実施例の可動体部Mmに対してほぼ二倍の軸方向幅に設定した。この結果、支持ローラ6…のローラ周面6f…は、補助体部Mmsの外周部Mmeに当接する。この構成により、上述したように、支持ローラ6…は、ステータ2に対して軸方向Fsに並べて配することが可能となり、ステータコア部2c…及びステータコイル3…の数量(極数)を増やすことにより、固定体部Mcの性能向上、更には可動体部Mmに対する支持の安定性及び円滑性を高めることが可能となる。
さらに、第一実施例及び第二実施例の場合、可動体部Mmを構成するに際し、リング形の可動体部Mmの内周部Mmiより内方を中空部Saとして構成したが、第三実施例では、回転により特定の機能を生じさせる特定機能部Sb,Scを設けた。
一例として示した図13は、色分解された光を投射する光学装置(単板式プロジェクタ等)のRGBカラーフィルタ(フィルタ機能部)Sbを配設したものであり、周方向Ffに三等分した領域に、レッドフィルタ51,グリーンフィルタ52,ブルーフィルタ53を順次配して構成した。一方、他の例として示した図17は、七枚のファンブレード61…により構成した送風ファン(送風機能部)Scである。この場合、送風を邪魔するモータ等が中心位置に存在しないため、比較的細いパイプ等の内部に効率的に送風することができる。
このように、可動体部Mmを構成するに際し、内周部Mmiより内方に、回転により特定の機能を生じさせる特定機能部Sb,Scとして構成すれば、一例として示したように、色分解された光を投射する光学装置(単板式プロジェクタ等)のRGBカラーフィルタや特殊用途における送風装置(送風ファン)等、各種用途に利用及び応用できるなど、多様性及び発展性に優れた回転駆動装置Mとして提供することができる。
その他、図13-図17に示す第三実施例において、図1-図12に示した第一実施例及び第二実施例と同一の部分及び同一の機能部分については、同一の符号を付して、その構成を明確にするとともに、その詳細な説明は省略する。
このような第三実施例であっても、薄型化を得る観点からは第一実施例及び第二実施例に及ばないものの、可動体部Mmの軽量化を可能にする等の作用効果は第一実施例と同様に得ることができる。
以上、好適実施形態(第一実施例,第二実施例,第三実施例)について詳細に説明したが、本発明は、このような実施形態に限定されるものではなく、細部の構成,形状,素材,数量,数値等において、本発明の要旨を逸脱しない範囲で、任意に変更,追加,削除することができる。
例えば、ステータコア部2c…の数量(極数)及びロータマグネット4の極数は、例示の数量(極数)に限定されるものではなく、一般的には任意の複数に基づいて実施可能である。また、ローラ周面6f…を可動体部Mmの外周部Mmeに当接させた場合を示したが、可動体部Mm(補助体部Mms)の内周部Mmiに当接させる場合を排除するものではない。さらに、ローラガイド13は、ロータヨーク5の内周面5i及びロータマグネット4の外周面4eを覆う被覆シート部15d,15uを設けた場合を示したが、被覆シート部15d又は15uのいずれか一方を設ける場合を排除するものではない。一方、支持ローラ6…としてラジアル軸受6b…を用いることが望ましいが、単純構造となるコロ等を利用したローラ機能を排除するものではない。他方、センサ支持部2ca,2cb,防塵シート17sを含む防塵カバー17,防塵シート18は、同様の機能を有する他の構成により置換できるとともに、必ずしも必須の構成要素となるものではない。
本発明に係る回転駆動装置は、内側に中空部を確保することにより、この中空部に各種の特定機能部を付加して使用する、例示の自動織機,RGBカラーフィルタ(光学装置),送風装置をはじめ、開口制御装置,シャッタ装置(光学制御装置),ロボットのハンド装置等の各種用途に利用することができる。
Claims (18)
- 複数のステータコア部を一体に設けたステータ及び前記ステータコア部に巻回したステータコイルを有する固定体部と、この固定体部に対向する複数の磁極を有するロータマグネット及びこのロータマグネットに付設したロータヨークを有する可動体部を備えてなる回転駆動装置であって、リング形に形成した前記ロータヨーク,及び複数の磁極を前記ロータヨークの外周部の周方向に沿って配したリング形のロータマグネットを有する前記可動体部と、リング形に形成した前記ステータの内周部に、前記可動体部の外周部に対向する複数のステータコア部を周方向に沿って所定間隔置きに配した前記固定体部と、前記ステータに対して位置を固定し、かつローラ周面を前記可動体部の外周部又は内周部に当接させることにより当該可動体部を旋回自在に支持する複数の支持ローラからなる可動体支持部とを備えることを特徴とする回転駆動装置。
- 前記支持ローラは、ラジアル軸受を用いることを特徴とする請求項1記載の回転駆動装置。
- 前記ラジアル軸受は、全部,又は少なくとも外輪部を含む一部を、非磁性素材により形成することを特徴とする請求項2記載の回転駆動装置。
- 前記ラジアル軸受は、全部を、磁性素材により形成することを特徴とする請求項2記載の回転駆動装置。
- 前記ラジアル軸受は、外周面に、非磁性素材により形成した別途のローラ被覆リングを一体に設けてなることを特徴とする請求項4記載の回転駆動装置。
- 前記ロータマグネットは、周方向へ複数極に分割着磁した一体成型マグネットを用いることを特徴とする請求項1記載の回転駆動装置。
- 前記ロータヨークは、前記ロータマグネットの厚みよりも薄く形成することを特徴とする請求項1又は6記載の回転駆動装置。
- 前記固定体部は、前記ステータの一端面を支持し、かつ前記可動体支持部を配設するリング形のベース部を備えることを特徴とする請求項1記載の回転駆動装置。
- 前記固定体部は、前記ベース部に配設した前記支持ローラを、前記複数のステータコア部における一部のステータコア部を除去して形成した収容空間に収容することにより、前記支持ローラのローラ周面を、前記可動体部の外周部又は内周部に当接させてなることを特徴とする請求項8記載の回転駆動装置。
- 前記固定体部は、前記ベース部に配設した前記支持ローラのローラ周面を、前記ステータに対して軸方向にオフセットした位置で前記可動体部の外周部又は内周部に当接させてなることを特徴とする請求項8記載の回転駆動装置。
- 前記可動体部は、軸方向に延設することにより、外周部又は内周部に前記支持ローラのローラ周面が当接するリング形の補助体部を一体に備えることを特徴とする請求項10記載の回転駆動装置。
- 前記可動体部は、前記支持ローラの軸方向相対変位を規制するストッパ部を有するローラガイドを備えることを特徴とする請求項1-11のいずれかに記載の回転駆動装置。
- 前記ローラガイドは、全部又は少なくとも一部を潤滑性合成樹脂素材により形成することを特徴とする請求項12記載の回転駆動装置。
- 前記ローラガイドは、前記ロータヨークの内周面及び/又は前記ロータマグネットの外周面を覆う被覆シート部を有してなることを特徴とする請求項12又は13記載の回転駆動装置。
- 前記ローラガイドは、前記ロータマグネットの外周面を覆う被覆シート部を非磁性金属素材により形成することを特徴とする請求項14記載の回転駆動装置。
- 前記複数のステータコア部は、一部を、センサを支持するセンサ支持部として形成することを特徴とする請求項1記載の回転駆動装置。
- 前記可動体部は、内周部より内方を中空部として構成することを特徴とする請求項1記載の回転駆動装置。
- 前記可動体部は、内周部より内方に、回転により特定の機能を生じさせる特定機能部として構成することを特徴とする請求項1記載の回転駆動装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020135549 | 2020-08-11 | ||
| JP2020135549 | 2020-08-11 | ||
| PCT/JP2021/029293 WO2022034860A1 (ja) | 2020-08-11 | 2021-08-06 | 回転駆動装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2022034860A1 JPWO2022034860A1 (ja) | 2022-02-17 |
| JP7627272B2 true JP7627272B2 (ja) | 2025-02-05 |
Family
ID=80247793
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022542836A Active JP7627272B2 (ja) | 2020-08-11 | 2021-08-06 | 回転駆動装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US12587063B2 (ja) |
| EP (1) | EP4199316A4 (ja) |
| JP (1) | JP7627272B2 (ja) |
| CN (1) | CN116097546A (ja) |
| WO (1) | WO2022034860A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023135886A1 (ja) * | 2022-01-17 | 2023-07-20 | タカノ株式会社 | 回転駆動装置 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005121172A (ja) | 2003-10-20 | 2005-05-12 | Ntn Corp | 発電機付車輪用軸受装置 |
| JP2009177980A (ja) | 2008-01-25 | 2009-08-06 | Alphana Technology Kk | ブラシレスモータ |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10271741A (ja) | 1997-03-27 | 1998-10-09 | Canon Inc | モータ装置 |
| DE19733262A1 (de) | 1997-08-01 | 1999-02-04 | Dornier Gmbh Lindauer | Rotations-Kantendreher mit direkt elektromagnetischem Antrieb für Webmaschinen |
| DE19733261C2 (de) | 1997-08-01 | 2001-07-19 | Dornier Gmbh Lindauer | Rotations-Kantendreher mit direkt elektromagnetischem Antrieb für Webmaschinen |
| EP1104077B1 (en) * | 1999-11-19 | 2012-12-26 | Honda Giken Kogyo Kabushiki Kaisha | Permanent magnet rotary electric motor |
| JP3646205B2 (ja) * | 2000-09-04 | 2005-05-11 | 光洋精工株式会社 | 電動パワーステアリング装置 |
| DE10152502A1 (de) * | 2001-10-24 | 2003-05-08 | Bosch Gmbh Robert | Permanentmagneterregte elektrische Maschine |
| DE102004014640A1 (de) * | 2004-03-23 | 2005-11-10 | Andree Altmikus | Ultraleichter Hochmoment-Elektromotor |
| JP4241855B2 (ja) * | 2007-05-23 | 2009-03-18 | トヨタ自動車株式会社 | 永久磁石式回転電機および永久磁石式回転電機のロータ製造方法 |
| SE0950897A1 (sv) * | 2009-11-25 | 2011-02-22 | Vilmos Toeroek | Roterande elektrisk maskin med förbättrad rotorlagring. |
| DE102013015442A1 (de) * | 2013-09-17 | 2015-03-19 | Ondal Tape Processing Gmbh | Wickelkopfantrieb für eine Wickelmaschine und offener Segmentmotor |
| UA118567C2 (uk) * | 2016-02-15 | 2019-02-11 | Ігор Миколайович Савельєв | Магнітоелектричний мотор-генератор-стартер |
| DE102017100881A1 (de) * | 2017-01-18 | 2018-07-19 | Ebm-Papst Mulfingen Gmbh & Co. Kg | Wicklungstemperaturüberwachung |
| WO2018150192A1 (en) * | 2017-02-17 | 2018-08-23 | Arrival Limited | Electric motor |
| EP3602749A4 (en) * | 2017-03-29 | 2020-03-25 | SZ DJI Technology Co., Ltd. | HOLLOW MOTOR APPARATUSES AND RELATED SYSTEMS AND METHODS |
| CN110556994B (zh) * | 2019-09-16 | 2025-05-02 | 续新技术电器(深圳)有限公司 | 电机 |
-
2021
- 2021-08-06 WO PCT/JP2021/029293 patent/WO2022034860A1/ja not_active Ceased
- 2021-08-06 US US18/020,792 patent/US12587063B2/en active Active
- 2021-08-06 CN CN202180056051.4A patent/CN116097546A/zh active Pending
- 2021-08-06 EP EP21855939.1A patent/EP4199316A4/en active Pending
- 2021-08-06 JP JP2022542836A patent/JP7627272B2/ja active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005121172A (ja) | 2003-10-20 | 2005-05-12 | Ntn Corp | 発電機付車輪用軸受装置 |
| JP2009177980A (ja) | 2008-01-25 | 2009-08-06 | Alphana Technology Kk | ブラシレスモータ |
Also Published As
| Publication number | Publication date |
|---|---|
| US20240039366A1 (en) | 2024-02-01 |
| WO2022034860A1 (ja) | 2022-02-17 |
| CN116097546A (zh) | 2023-05-09 |
| EP4199316A4 (en) | 2024-09-11 |
| EP4199316A1 (en) | 2023-06-21 |
| US12587063B2 (en) | 2026-03-24 |
| JPWO2022034860A1 (ja) | 2022-02-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN108370195B (zh) | Bldc电机 | |
| US20030057784A1 (en) | Magnetically levitated motor and magnetic bearing apparatus | |
| US5148069A (en) | Recessed rotation detectors for brushless motors | |
| US7626291B2 (en) | Drive apparatus | |
| US6713936B2 (en) | Stepping motor | |
| JP2004274998A (ja) | 単相誘導電動機 | |
| JP7627272B2 (ja) | 回転駆動装置 | |
| US7638911B2 (en) | Motor | |
| US20140217847A1 (en) | Brushless permanent magnet motor | |
| JP2021078181A (ja) | リードスクリュー装置 | |
| USRE35702E (en) | Compact motor mount for information storage devices | |
| JP2021057992A (ja) | ロータ及びモータ | |
| JP2015046966A (ja) | ステッピングモータ | |
| JP7773381B2 (ja) | 回転駆動装置 | |
| EP4468574A1 (en) | Rotary drive device | |
| JPH05252713A (ja) | ブラシレスモータ | |
| JPS6023585B2 (ja) | モ−タ | |
| JPH04359644A (ja) | ブラシレスモータ | |
| JP2575353B2 (ja) | 直流モ−タ | |
| KR200190464Y1 (ko) | 브러시리스 dc모터 | |
| KR940003606Y1 (ko) | 작류 무정류자 모터 | |
| KR20250094861A (ko) | 발전기용 고정자 및 이를 포함하는 축방향 자속형 모터 | |
| KR200212480Y1 (ko) | 비엘디씨 모터 | |
| CN121025055A (zh) | 具有三自由度混合式磁悬浮轴承的旋转驱动机械 | |
| JPS60222593A (ja) | Dcブラシレスフアンモ−タ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240508 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20250115 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250124 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7627272 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |