JP7629732B2 - 車両用環境認識方法及び車両用環境認識装置 - Google Patents
車両用環境認識方法及び車両用環境認識装置 Download PDFInfo
- Publication number
- JP7629732B2 JP7629732B2 JP2021006277A JP2021006277A JP7629732B2 JP 7629732 B2 JP7629732 B2 JP 7629732B2 JP 2021006277 A JP2021006277 A JP 2021006277A JP 2021006277 A JP2021006277 A JP 2021006277A JP 7629732 B2 JP7629732 B2 JP 7629732B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- area
- image
- super
- lane
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Landscapes
- Image Analysis (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Traffic Control Systems (AREA)
Description
以上説明したように、本実施形態に係る車両用環境認識装置1によれば、以下の作用効果が得られる。
10 カメラ
11 ヨーレートセンサ
12 GPS受信機
13 ナビゲーション装置
14 ステアリングアクチュエータ
15 アクセルペダルアクチュエータ
16 ブレーキアクチュエータ
20 コントローラ
21 領域設定部
22 画像シフト部
23 超解像処理部
24 道路構造物認識部
25 車両制御部
Claims (4)
- 自車両の周囲を異なるタイミングで複数回撮像するカメラと、前記カメラによって異なるタイミングで撮像された複数の画像を処理するコントローラとを備える車両用環境認識装置の車両用環境認識方法であって、
前記コントローラは、
前記自車両の進行方向を推定し、
推定された前記自車両の進行方向に基づいて前記複数の画像のそれぞれに対して画像上で所定の領域を設定し、
設定された前記領域における画像上の移動量に基づいて、前記複数の画像の位置合わせを行い、
前記位置合わせが行われた複数の画像を用いて超解像処理を行い、前記カメラによって撮像された画像の解像度を超える超解像画像を生成し、
前記超解像画像に基づいて道路構造物を認識し、
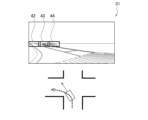
前記自車両が交差点を走行すると判断された場合、前記コントローラは、
前記領域を、前記自車両が走行する車線、対向車線、及び歩道を含むように前記自車両から見て左右方向に相当する方向に拡げ、
拡げた前記領域を、前記自車両が走行する車線を含む領域、前記対向車線を含む領域、及び前記歩道を含む領域に分割して、分割した各領域を設定する
ことを特徴とする車両用環境認識方法。 - 前記コントローラは前記画像上の横断歩道の位置に前記領域を設定する
ことを特徴とする請求項1に記載の車両用環境認識方法。 - 前記コントローラは、前記自車両のヨーレートを検出するセンサから取得した前記ヨーレート、あるいは、前記画像から取得された走行区分線に関する情報に基づいて前記自車両の進行方向を推定する
ことを特徴とする請求項1又は2に記載の車両用環境認識方法。 - 自車両の周囲を異なるタイミングで複数回撮像するカメラと、
前記カメラによって異なるタイミングで撮像された複数の画像を処理するコントローラとを備え、
前記コントローラは、
前記自車両の進行方向を推定し、
推定された前記自車両の進行方向に基づいて前記複数の画像のそれぞれに対して画像上で所定の領域を設定し、
設定された前記領域における画像上の移動量に基づいて、前記複数の画像の位置合わせを行い、
前記位置合わせが行われた複数の画像を用いて超解像処理を行い、前記カメラによって撮像された画像の解像度を超える超解像画像を生成し、
前記超解像画像に基づいて道路構造物を認識し、
前記自車両が交差点を走行すると判断された場合、前記コントローラは、
前記領域を、前記自車両が走行する車線、対向車線、及び歩道を含むように前記自車両から見て左右方向に相当する方向に拡げ、
拡げた前記領域を、前記自車両が走行する車線を含む領域、前記対向車線を含む領域、及び前記歩道を含む領域に分割して、分割した各領域を設定する
ことを特徴とする車両用環境認識装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021006277A JP7629732B2 (ja) | 2021-01-19 | 2021-01-19 | 車両用環境認識方法及び車両用環境認識装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021006277A JP7629732B2 (ja) | 2021-01-19 | 2021-01-19 | 車両用環境認識方法及び車両用環境認識装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022110706A JP2022110706A (ja) | 2022-07-29 |
| JP7629732B2 true JP7629732B2 (ja) | 2025-02-14 |
Family
ID=82575351
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021006277A Active JP7629732B2 (ja) | 2021-01-19 | 2021-01-19 | 車両用環境認識方法及び車両用環境認識装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7629732B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102748438B1 (ko) * | 2022-08-12 | 2025-01-03 | 한국전력공사 | 차량을 이용한 배전선로의 광학이미지 자동촬영 시스템 및 그에 따른 운영방법 |
| WO2025104883A1 (ja) * | 2023-11-16 | 2025-05-22 | 日産自動車株式会社 | 画像処理方法及び画像処理装置 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009059132A (ja) | 2007-08-31 | 2009-03-19 | Daihatsu Motor Co Ltd | 物体認識装置 |
| JP2017062638A (ja) | 2015-09-25 | 2017-03-30 | 日立オートモティブシステムズ株式会社 | 画像認識処理装置、及びプログラム |
| JP2018007077A (ja) | 2016-07-04 | 2018-01-11 | 株式会社ニコン | 撮像装置および自動車 |
-
2021
- 2021-01-19 JP JP2021006277A patent/JP7629732B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009059132A (ja) | 2007-08-31 | 2009-03-19 | Daihatsu Motor Co Ltd | 物体認識装置 |
| JP2017062638A (ja) | 2015-09-25 | 2017-03-30 | 日立オートモティブシステムズ株式会社 | 画像認識処理装置、及びプログラム |
| JP2018007077A (ja) | 2016-07-04 | 2018-01-11 | 株式会社ニコン | 撮像装置および自動車 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2022110706A (ja) | 2022-07-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109328376B (zh) | 物体跟踪方法及物体跟踪装置 | |
| JP6566132B2 (ja) | 物体検出方法及び物体検出装置 | |
| US12054144B2 (en) | Road information generation apparatus | |
| CN110435646B (zh) | 一种车辆的盲区目标追踪方法 | |
| JP2007316025A (ja) | 自車位置測定装置 | |
| CN110622226A (zh) | 行驶辅助装置的动作预测方法以及动作预测装置 | |
| JP6171499B2 (ja) | 危険度判定装置及び危険度判定方法 | |
| JP6973964B2 (ja) | 走行支援方法及び走行支援装置 | |
| KR101724868B1 (ko) | 영상기반 교통표시 인식장치 및 방법 | |
| JP7629732B2 (ja) | 車両用環境認識方法及び車両用環境認識装置 | |
| US12260581B2 (en) | Distance calculation apparatus and vehicle position estimation apparatus | |
| CN115050203A (zh) | 地图生成装置以及车辆位置识别装置 | |
| JP2018063122A (ja) | 経路選択方法及び経路選択装置 | |
| JP7780376B2 (ja) | 地図生成装置 | |
| JP7259939B2 (ja) | 挙動予測方法及び挙動予測装置並びに車両制御装置 | |
| JP7563263B2 (ja) | 走路推定方法及び走路推定装置 | |
| JP7571642B2 (ja) | 走路推定方法及び走路推定装置 | |
| JP7591436B2 (ja) | 走行支援方法及び走行支援装置 | |
| JP7558091B2 (ja) | 走行支援方法及び走行支援装置 | |
| JP7236279B2 (ja) | 走行支援方法及び走行支援装置 | |
| JP7805227B2 (ja) | 信号機認識方法及び信号機認識装置 | |
| JP7753958B2 (ja) | 走行制御方法及び走行制御装置 | |
| JP7149171B2 (ja) | 物体認識方法及び物体認識装置 | |
| CN114987528B (zh) | 地图生成装置 | |
| JP7826855B2 (ja) | 走路推定方法及び走路推定装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20231107 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20240729 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240820 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240927 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20250107 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250203 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7629732 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |