JP7632332B2 - ハイブリッド車両の制御装置 - Google Patents
ハイブリッド車両の制御装置 Download PDFInfo
- Publication number
- JP7632332B2 JP7632332B2 JP2022014452A JP2022014452A JP7632332B2 JP 7632332 B2 JP7632332 B2 JP 7632332B2 JP 2022014452 A JP2022014452 A JP 2022014452A JP 2022014452 A JP2022014452 A JP 2022014452A JP 7632332 B2 JP7632332 B2 JP 7632332B2
- Authority
- JP
- Japan
- Prior art keywords
- deceleration
- deceleration control
- hybrid vehicle
- cpu
- internal combustion
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
Landscapes
- Hybrid Electric Vehicles (AREA)
- Processes For Solid Components From Exhaust (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Description
1.内燃機関、および回転電機を備えるハイブリッド車両に適用され、前記内燃機関は、排気通路に、排気中の粒子状物質を捕集するフィルタを備え、第1減速制御処理、第2減速制御処理、および選択処理を実行するように構成され、前記第1減速制御処理は、フューエルカット処理を利用して前記ハイブリッド車両の減速要求に応じる処理であり、前記フューエルカット処理は、前記内燃機関の気筒内での燃料の燃焼制御を停止する処理であり、前記第2減速制御処理は、前記フューエルカット処理を利用することなく前記ハイブリッド車両の減速要求に応じる処理であり、前記選択処理は、PM堆積量が閾値以上の場合に前記第2減速制御処理を実行することを選択して且つ、前記PM堆積量が前記閾値よりも小さい場合に前記第1減速制御処理を実行することを選択する処理であり、前記PM堆積量は、前記フィルタに堆積されている粒子状物質の量であるハイブリッド車両の制御装置である。
5.徐変処理を実行するように構成され、前記徐変処理は、前記第1減速制御処理の実行中に前記PM堆積量が前記閾値以上となる場合、前記第2減速制御処理に切り替えるのに先立って前記第1減速制御処理において前記第2減速制御処理によって実現可能な減速度へと徐々に移行させる処理である上記1~4のいずれか1つに記載のハイブリッド車両の制御装置である。
「前提構成」
図1に示すように、内燃機関10は、4つの気筒#1~#4を備える。内燃機関10の吸気通路12には、スロットルバルブ14が設けられている。吸気通路12の下流部分である吸気ポート12aには、吸気ポート12aに燃料を噴射するポート噴射弁16が設けられている。吸気通路12に吸入された空気やポート噴射弁16から噴射された燃料は、吸気バルブ18の開弁に伴って、燃焼室20に流入する。燃焼室20には、筒内噴射弁22から燃料が噴射される。また、燃焼室20内の空気と燃料との混合気は、点火装置24の火花放電に伴って燃焼に供される。そのときに生成される燃焼エネルギは、クランク軸26の回転エネルギに変換される。
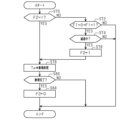
図2に、GPF34の保護に関する処理の手順を示す。図2に示す処理は、ROM74に記憶されたプログラムをCPU72がたとえば所定周期で繰り返し実行することにより実現される。なお、以下では、先頭に「S」が付与された数字によって、各処理のステップ番号を表現する。
図3に示すように、PM堆積量DPMが大きい場合のFC可能時間TfcはPM堆積量DPMが小さい場合のFC可能時間Tfc以下とされる。これは、PM堆積量DPMが大きいほど、GPF34に酸素が流入した際の単位時間当たりのPMの酸化量が多くなることに鑑みたものである。また、温度Tgpfが高い場合のFC可能時間Tfcは、温度Tgpfが低い場合のFC可能時間Tfc以下とされる。これは、温度Tgpfが高いほど、温度Tgpfが上限値に到達するまでの時間が短くなることに鑑みたものである。
なおCPU72は、S26,S29の処理を完了する場合と、S20,S28の処理において否定判定する場合と、には、図2に示した一連の処理を一旦終了する。
図4に、第1モータジェネレータ52および第2モータジェネレータ54の出力の制御に関する処理の手順を示す。図4に示す処理は、ROM74に記憶されたプログラムをCPU72がたとえば所定周期で繰り返し実行することにより実現される。
次に、CPU72は、目標機関回転速度NE*と目標第1回転速度Nmg1*とを算出する(S44)。ここで、目標機関回転速度NE*は、機関回転速度NEの目標値である。また、目標第1回転速度Nmg1*は、第1モータジェネレータ52の回転軸52aの回転速度である第1回転速度Nmg1の目標値である。詳しくは、S44の処理は、以下の処理となる。
NE*={ρ/(1+ρ)}・Nmg1*+{1/(1+ρ)}・Np
ただし、上述の式の中のプラネタリギア比ρは、サンギアSの歯数を、リングギアRの歯数で除算した値である。
次に、CPU72は、要求第1トルクTmg1*を算出する(S50)。要求第1トルクTmg1*は、第1モータジェネレータ52に対する要求トルクである。CPU72は、要求第1トルクTmg1*を、開ループ項と、フィードバック項との和とする。ここで、開ループ項は、「{-ρ/(1+ρ)}・Teb」である。ここで、「-ρ/(1+ρ)」は、キャリアCのトルクをサンギアSのトルクに換算する係数である。一方、フィードバック項は、第1回転速度Nmg1のフィードバック制御のための操作量である。フィードバック項は、比例要素の出力値と積分要素の出力値との和である。比例要素の出力値は、誤差err1に比例ゲインKpを乗算した値である。積分要素の出力値は、誤差err1に積分ゲインKiを乗算した値の積算値である。
「スロットルバルブ14の操作処理」
図5に、スロットルバルブ14の操作に関する処理の手順を示す。図5に示す処理は、ROM74に記憶されたプログラムをCPU72がたとえば所定周期で繰り返し実行することにより実現される。
「本実施形態の作用および効果」
CPU72は、アクセル操作量ACCPおよび出力側回転速度Npに基づき要求駆動トルクTp*を算出し、これに基づき、内燃機関10の各種操作部と、第1インバータ56および第2インバータ58と、を操作する。CPU72は、アクセル操作量ACCPが所定量以下の場合、要求駆動トルクTp*を負の値に設定する。ここで、通常、CPU72は、要求駆動トルクTp*を、内燃機関10がフューエルカット処理を実行することにより、実現可能な値に設定する。
(1)CPU72は、保護用のマップデータを選択するのに先立って、運転者にその旨を告知した。これにより、アクセル操作に対する減速度が突然変化したという印象を運転者が抱くことを抑制できる。そのため、運転者に不快感を与えることを抑制できる。
以下、第2の実施形態について、第1の実施形態との相違点を中心に図面を参照しつつ説明する。
図6に、上記処理に関する手順を示す。図6に示す処理は、ROM74に記憶されたプログラムをCPU72がたとえば所定周期で繰り返し実行することにより実現される。
なお、CPU72は、S84の処理を完了する場合と、S72,S74,S80の処理において否定判定する場合と、には、図6に示す一連の処理を一旦終了する。
図7に、減速時に保護フラグF1が「0」から「1」に切り替わった場合の処理を例示する。図7には、FC可能時間Tfcが閾値Tth以下となるPM堆積量DPMであるPM堆積量DPMの閾値を一点鎖線にて示している。
以下では、「課題を解決するための手段」の欄に記載した解決手段の番号毎に、対応関係を示している。[1]回転電機は、第2モータジェネレータ54に対応する。フィルタは、GPF34に対応する。第1減速制御処理は、要求駆動トルクTp*が負のときにおける、S36,S38~S56,S60~S66の処理に対応する。第2減速制御処理は、要求駆動トルクTp*が負のときにおける、S34,S38~S56,S60~S66の処理に対応する。フューエルカット処理は、S36の処理によって可能となる処理に対応する。選択処理は、図2に示す処理に対応する。閾値は、閾値Dα,Dβに対応する。[2]閾値Dαが閾値Dβよりも小さいことに対応する。[3]変速比調整装置は、遊星歯車機構50および第1モータジェネレータ52に対応する。蓄電装置は、バッテリ59に対応する。[4]告知処理は、S22の処理に対応する。[5]徐変処理は、S78の処理に対応する。[6]図2において、S26の処理が実行される場合、トリップが終了しない限り、S29の処理がなされないことに対応する。
なお、本実施形態は、以下のように変更して実施することができる。本実施形態および以下の変更例は、技術的に矛盾しない範囲で互いに組み合わせて実施することができる。
・第1減速制御処理としては、S36,S38~S56,S60~S66の処理を実行する処理に限らない。たとえば、フューエルカット処理のみで制動力を生成する処理であってもよい。換言すれば、回転電機の回生制御とフューエルカット処理による負荷トルクとの協働で減速要求に応じることなく、内燃機関10の負荷トルクのみで減速要求に応じる処理としてもよい。
・第2減速制御処理としては、第1モータジェネレータ52の回転速度制御を利用して減速要求に応じる処理に限らない。たとえば、下記「変速比調節装置について」の欄に記載したように、車両が有段変速装置を備える場合、有段変速装置による変速比を調整することによって減速要求に応じてもよい。その場合、第2モータジェネレータ54による回生電力が小さい場合には、機関回転速度NEをより大きくするように変速比を操作する。
「選択処理について」
・FC可能時間Tfcが閾値Tth以下であるか否かに応じて、第1減速制御処理、および第2減速制御処理の2つの処理のうちのいずれを採用するかを選択する処理に限らない。たとえば、CPU72が、PM堆積量DPMが閾値以上であるか否かを判定する処理であってもよい。ここで、CPU72は、閾値を、温度Tgpfに応じて可変設定してもよい。ただし、閾値を可変設定することは必須ではない。
・上記実施形態では、保護フラグF1が「1」とされる場合、そのトリップの間は、保護フラグF1を「0」としないこととしたが、これに限らない。換言すれば、第2減速制御処理が一旦選択される状況となる場合、そのトリップの期間は、第1減速制御処理を選択しないこととしたが、これに限らない。たとえば、FC可能時間Tfcが閾値Tthよりも大きくなる状態の継続時間が規定時間以上となる場合には、保護フラグF1に「0」を代入してもよい。
・変速比調節装置としては、遊星歯車機構50および第1モータジェネレータ52を備えるものに限らない。たとえば、複数のギアの係合状態を変更することにより変速比を変更する有段変速装置等の変速装置であってもよい。
・ハイブリッド車両としては、シリーズ・パラレルハイブリッド車両に限らない。たとえば、パラレルハイブリッド車両であってもよい。
内燃機関、および変速比調節装置を備える車両に適用され、前記内燃機関は、排気通路に、排気中の粒子状物質を捕集するフィルタを備え、前記内燃機関のクランク軸は、前記変速比調節装置を介して駆動輪に機械的に連結可能とされ、前記変速比調節装置は、前記クランク軸の回転速度と前記駆動輪の回転速度との比を調節する装置であり、減速制御処理、予測処理、および制限処理を実行し、前記減速制御処理は、前記車両の減速要求が生じる場合、前記変速比調節装置を操作して前記車両の減速度を制御する処理であり、少なくとも前記制限処理が実行されていない場合の前記減速制御処理には、フューエルカット処理が含まれ、前記フューエルカット処理は、前記内燃機関の気筒への燃料の供給を停止する処理であり、前記予測処理は、前記フィルタに捕集される粒子状物質の量に基づき、前記減速要求に応じた前記フューエルカット処理が実行されることによって前記フィルタの温度が許容範囲を超えて上昇するか否かを予測する処理であり、前記制限処理は、前記予測処理によって上昇すると予測する場合、前記車両の減速要求が生じるときの前記車両の減速度を小さい側に制限する処理である車両の減速制御装置である。
・シフトポジションに応じて異なるマップを用いることは必須ではない。たとえば、DレンジとBレンジとで共通のマップとしてもよい。その場合、内燃機関10の燃焼制御を実行しつつ得られる最小の駆動トルクを、駆動トルクの最小値とすればよい。
・予測処理としては、都度の温度TgpfおよびPM堆積量DPMに基づき予測をする処理に限らない。たとえば、「告知処理について」の欄に記載したように、車両VCの発進前に告知処理を実行するなら、発進前にFC可能時間Tfcが閾値Tth以下となるか否かを判定する処理としてもよい。この場合、FC可能時間Tfcは、たとえばPM堆積量DPMのみを入力として算出すればよい。またこれに代えてPM堆積量DPMと内燃機関10の始動時の温度とを入力として算出してもよい。さらに、たとえば、車両VCの目的地の設定がなされている場合、目的地までの経路を示す変数を入力に含めてもよい。その場合、目的地までの経路が全て市街地である場合には、下り坂を多く含む場合と比較して、PM堆積量DPMがより大きい場合にFC可能時間Tfcが閾値Tth以下となると判定すればよい。
・図3には、車両VCの走行中に、減速度を制限する旨を告知することを例示したが、これに限らない。たとえば、車両VCの発進前に限って告知処理を実行してもよい。具体的には、たとえば第1インバータ56および第2インバータ58とバッテリ59とを接続するシステムメインリレーが閉状態に切り替えられることをトリガとして告知処理を実行してもよい。
26…クランク軸
30…排気通路
32…三元触媒
34…GPF
50…遊星歯車機構
52…第1モータジェネレータ
54…第2モータジェネレータ
56…第1インバータ
58…第2インバータ
59…バッテリ
60…駆動輪
70…制御装置
Claims (5)
- 内燃機関、および回転電機を備えるハイブリッド車両に適用され、
前記内燃機関は、排気通路に、排気中の粒子状物質を捕集するフィルタを備え、
第1減速制御処理、第2減速制御処理、および選択処理を実行するように構成され、
前記第1減速制御処理は、フューエルカット処理を利用して前記ハイブリッド車両の減速要求に応じる処理であり、
前記フューエルカット処理は、前記内燃機関の気筒内での燃料の燃焼制御を停止する処理であり、
前記第2減速制御処理は、前記フューエルカット処理を利用することなく前記ハイブリッド車両の減速要求に応じる処理であり、
前記選択処理は、PM堆積量が閾値以上の場合に前記第2減速制御処理を実行することを選択して且つ、前記PM堆積量が前記閾値よりも小さい場合に前記第1減速制御処理を実行することを選択する処理であり、
前記PM堆積量は、前記フィルタに堆積されている粒子状物質の量であり、
徐変処理を実行するように構成され、
前記徐変処理は、前記第1減速制御処理の実行中に前記PM堆積量が前記閾値以上となる場合、前記第2減速制御処理に切り替えるのに先立って前記第1減速制御処理において前記第2減速制御処理によって実現可能な減速度へと徐々に移行させる処理であるハイブリッド車両の制御装置。 - 内燃機関、および回転電機を備えるハイブリッド車両に適用され、
前記内燃機関は、排気通路に、排気中の粒子状物質を捕集するフィルタを備え、
第1減速制御処理、第2減速制御処理、および選択処理を実行するように構成され、
前記第1減速制御処理は、フューエルカット処理を利用して前記ハイブリッド車両の減速要求に応じる処理であり、
前記フューエルカット処理は、前記内燃機関の気筒内での燃料の燃焼制御を停止する処理であり、
前記第2減速制御処理は、前記フューエルカット処理を利用することなく前記ハイブリッド車両の減速要求に応じる処理であり、
前記選択処理は、PM堆積量が閾値以上の場合に前記第2減速制御処理を実行することを選択して且つ、前記PM堆積量が前記閾値よりも小さい場合に前記第1減速制御処理を実行することを選択する処理であり、
前記PM堆積量は、前記フィルタに堆積されている粒子状物質の量であり、
1つのトリップ内において前記第2減速制御処理を実行した履歴がある場合、前記PM堆積量が前記閾値よりも小さくなっても前記ハイブリッド車両の減速要求に応じて前記第2減速制御処理を実行するように構成されているハイブリッド車両の制御装置。 - 前記選択処理は、前記フィルタの温度に応じて前記閾値を可変設定する処理であって且つ前記フィルタの温度が高い場合の前記閾値を前記フィルタの温度が低い場合の前記閾値以下とする処理である請求項1または2記載のハイブリッド車両の制御装置。
- 前記ハイブリッド車両は、変速比調節装置、および蓄電装置を備え、
前記内燃機関のクランク軸は、前記変速比調節装置を介して駆動輪に機械的に連結可能とされ、
前記変速比調節装置は、前記クランク軸の回転速度と前記駆動輪の回転速度との比を調節する装置であり、
前記蓄電装置は、前記回転電機の回生電力を充電する装置であり、
前記第2減速制御処理は、前記蓄電装置の充電率に応じて前記回生電力および機関回転速度を設定する処理を含んで且つ、前記蓄電装置の充電率が大きい場合における前記回生電力を前記充電率が小さい場合における前記回生電力以下として且つ、前記蓄電装置の充電率が大きい場合における前記機関回転速度を前記充電率が小さい場合における前記機関回転速度以上とする処理を含む請求項1~3のいずれか1項に記載のハイブリッド車両の制御装置。 - 告知処理を実行するように構成され、
前記告知処理は、前記第2減速制御処理を実行するのに先立ってユーザに減速度が小さい側に制限される旨、告知する処理である請求項1~4のいずれか1項に記載のハイブリッド車両の制御装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US17/657,668 US11608793B2 (en) | 2021-04-19 | 2022-04-01 | Controller for hybrid electric vehicle and method for controlling hybrid electric vehicle |
| CN202210378142.6A CN115214610B (zh) | 2021-04-19 | 2022-04-12 | 混合动力车辆的控制装置及控制方法 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021070396 | 2021-04-19 | ||
| JP2021070396 | 2021-04-19 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022165380A JP2022165380A (ja) | 2022-10-31 |
| JP7632332B2 true JP7632332B2 (ja) | 2025-02-19 |
Family
ID=83845728
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022014452A Active JP7632332B2 (ja) | 2021-04-19 | 2022-02-01 | ハイブリッド車両の制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7632332B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7726136B2 (ja) * | 2022-06-29 | 2025-08-20 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
| JP7704083B2 (ja) * | 2022-06-29 | 2025-07-08 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009041403A (ja) | 2007-08-07 | 2009-02-26 | Nissan Motor Co Ltd | ハイブリッド原動機の制御装置 |
| JP2015031166A (ja) | 2013-07-31 | 2015-02-16 | トヨタ自動車株式会社 | 内燃機関の排気浄化装置 |
| JP2018122620A (ja) | 2017-01-30 | 2018-08-09 | トヨタ自動車株式会社 | ハイブリッド自動車 |
| JP2018159296A (ja) | 2017-03-22 | 2018-10-11 | トヨタ自動車株式会社 | 自動車 |
-
2022
- 2022-02-01 JP JP2022014452A patent/JP7632332B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009041403A (ja) | 2007-08-07 | 2009-02-26 | Nissan Motor Co Ltd | ハイブリッド原動機の制御装置 |
| JP2015031166A (ja) | 2013-07-31 | 2015-02-16 | トヨタ自動車株式会社 | 内燃機関の排気浄化装置 |
| JP2018122620A (ja) | 2017-01-30 | 2018-08-09 | トヨタ自動車株式会社 | ハイブリッド自動車 |
| JP2018159296A (ja) | 2017-03-22 | 2018-10-11 | トヨタ自動車株式会社 | 自動車 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2022165380A (ja) | 2022-10-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN115214610B (zh) | 混合动力车辆的控制装置及控制方法 | |
| JP4052080B2 (ja) | 車輌の制御装置 | |
| JP5530813B2 (ja) | ハイブリッド自動車およびその制御方法 | |
| US10914255B2 (en) | Vehicle, control device for vehicle, and control method for vehicle | |
| EP0922599B1 (en) | Internal combustion engine control apparatus of hybrid powered vehicle | |
| JP4646262B2 (ja) | ハイブリッド駆動機構を備えた自動車の駆動方法 | |
| JP7632332B2 (ja) | ハイブリッド車両の制御装置 | |
| CN114198215B (zh) | 用于内燃机的控制器、用于内燃机的控制方法及存储介质 | |
| CN110293956B (zh) | 混合动力车辆的控制装置 | |
| CN105917147B (zh) | 设置有无级变速器装置的车辆 | |
| JP7336300B2 (ja) | 車両の制御装置 | |
| JP2020111164A (ja) | ハイブリッド自動車 | |
| JP2004242450A (ja) | ハイブリッド車両の制御装置 | |
| JP7568123B2 (ja) | 車両の制御方法及び車両 | |
| KR102183178B1 (ko) | 차량 및, 차량의 제어 방법 | |
| JP7589827B2 (ja) | 車両の制御方法及び車両 | |
| JP2010036601A (ja) | ハイブリッド車両の制御装置およびそれを備えたハイブリッド車両ならびにハイブリッド車両の制御方法 | |
| JP3594010B2 (ja) | 車両の駆動力制御方法とその制御装置 | |
| JP7452500B2 (ja) | 車両用制御システム | |
| JP2021066309A (ja) | シリーズハイブリッド車両の制御装置 | |
| JP7586333B2 (ja) | 車両の制御方法及び車両 | |
| JP7768049B2 (ja) | ハイブリッド車両の制御装置 | |
| JP7392690B2 (ja) | ハイブリッド車両の制御装置 | |
| JP2024024302A (ja) | 車両用制御システム | |
| JP2025088591A (ja) | ハイブリッド車両の制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20231219 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20241022 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20241029 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20241218 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20250107 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250120 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7632332 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |