JP7635365B2 - 位置情報出力方法、位置情報出力システム、およびプログラム - Google Patents
位置情報出力方法、位置情報出力システム、およびプログラム Download PDFInfo
- Publication number
- JP7635365B2 JP7635365B2 JP2023510021A JP2023510021A JP7635365B2 JP 7635365 B2 JP7635365 B2 JP 7635365B2 JP 2023510021 A JP2023510021 A JP 2023510021A JP 2023510021 A JP2023510021 A JP 2023510021A JP 7635365 B2 JP7635365 B2 JP 7635365B2
- Authority
- JP
- Japan
- Prior art keywords
- information
- timing
- unit
- motorcycle
- vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images











Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/02—Services making use of location information
- H04W4/029—Location-based management or tracking services
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/123—Traffic control systems for road vehicles indicating the position of vehicles, e.g. scheduled vehicles; Managing passenger vehicles circulating according to a fixed timetable, e.g. buses, trains, trams
- G08G1/127—Traffic control systems for road vehicles indicating the position of vehicles, e.g. scheduled vehicles; Managing passenger vehicles circulating according to a fixed timetable, e.g. buses, trains, trams to a central station ; Indicators in a central station
- G08G1/13—Traffic control systems for road vehicles indicating the position of vehicles, e.g. scheduled vehicles; Managing passenger vehicles circulating according to a fixed timetable, e.g. buses, trains, trams to a central station ; Indicators in a central station the indicator being in the form of a map
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0108—Measuring and analyzing of parameters relative to traffic conditions based on the source of data
- G08G1/0112—Measuring and analyzing of parameters relative to traffic conditions based on the source of data from the vehicle, e.g. floating car data [FCD]
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0125—Traffic data processing
- G08G1/0133—Traffic data processing for classifying traffic situation
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0137—Measuring and analyzing of parameters relative to traffic conditions for specific applications
- G08G1/0141—Measuring and analyzing of parameters relative to traffic conditions for specific applications for traffic information dissemination
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/052—Detecting movement of traffic to be counted or controlled with provision for determining speed or overspeed
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0967—Systems involving transmission of highway information, e.g. weather, speed limits
- G08G1/096708—Systems involving transmission of highway information, e.g. weather, speed limits where the received information might be used to generate an automatic action on the vehicle control
- G08G1/096716—Systems involving transmission of highway information, e.g. weather, speed limits where the received information might be used to generate an automatic action on the vehicle control where the received information does not generate an automatic action on the vehicle control
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0967—Systems involving transmission of highway information, e.g. weather, speed limits
- G08G1/096766—Systems involving transmission of highway information, e.g. weather, speed limits where the system is characterised by the origin of the information transmission
- G08G1/096775—Systems involving transmission of highway information, e.g. weather, speed limits where the system is characterised by the origin of the information transmission where the origin of the information is a central station
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W12/00—Security arrangements; Authentication; Protecting privacy or anonymity
- H04W12/02—Protecting privacy or anonymity, e.g. protecting personally identifiable information [PII]
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/30—Services specially adapted for particular environments, situations or purposes
- H04W4/40—Services specially adapted for particular environments, situations or purposes for vehicles, e.g. vehicle-to-pedestrians [V2P]
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Analytical Chemistry (AREA)
- Signal Processing (AREA)
- Chemical & Material Sciences (AREA)
- Computer Networks & Wireless Communication (AREA)
- Life Sciences & Earth Sciences (AREA)
- Atmospheric Sciences (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Computer Security & Cryptography (AREA)
- Traffic Control Systems (AREA)
Description
[全体構成]
図1は、実施形態に係る位置情報出力システム1の概要図である。位置情報出力システム1は、例えば、自動二輪車100と、ユーザ端末装置200と、情報管理サーバ300とを備える。自動二輪車100と、ユーザ端末装置200と、情報管理サーバ300とは、ネットワークNWを介して接続されている。なお、ネットワークNWは、例えば、インターネット、WAN(Wide Area Network)、プロバイダ装置、無線基地局などを含む。なお、自動二輪車100と、ユーザ端末装置200とは、近距離無線通信を用いて接続可能である。
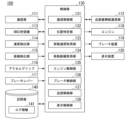
図2は、自動二輪車100の機能ブロック図である。自動二輪車100は、例えば、通信部111と、近距離無線通信部112と、GNSS受信機113と、速度検出部114と、距離検出部115と、アクセルグリップ116と、ブレーキレバー117と、エンジン118と、ブレーキ装置119と、表示装置120と、制御部130と、記憶部140とを備える。
図3は、ユーザ端末装置200の機能ブロック図である。ユーザ端末装置200は、例えば、通信部210と、入力部220と、表示部230と、近距離無線通信部240と、記憶部250と、GNSS受信機260と、センサ部270と、アプリ実行部280とを備える。
図4は、情報管理サーバ300の機能ブロック図である。情報管理サーバ300は、例えば、通信部310と、入力部320と、出力部330と、記憶部340と、処理部350とを備える。
図8は、位置情報出力システム1における処理の一例を示すシーケンス図である。上述の通りここでは、自動二輪車100が取得した情報を管理者に通知する例について説明する。まず、自動二輪車100は、第1タイミングにおける位置を示す情報を含む車両情報を生成し(ステップS1)、ネットワークNWを介して情報管理サーバ300に送信する(ステップS2)。車両情報には、上述の通り、位置情報、移動速度情報、移動距離情報などが含まれる。
図9は、第2タイミングの判定方法(その1)による情報管理サーバ300の処理の一例を示すフローチャートである。データ管理部351は、自動二輪車100から車両情報を受信したか否かを判定し(ステップS101)、車両情報を受信した場合、受信した車両情報をテンポラリDB341に保存する(ステップS102)。そして、出力情報生成部352は、条件1(移動距離Mが閾値Th_m以上か)あるいは条件2(経過時間Tが閾値Th_t以上か)を満たすか否かを判定する(ステップS103)。条件1または条件2を満たす場合、出力情報生成部352は、条件1または条件2のいずれか一方を満たした位置情報をコピーして、位置情報DB342に保存する(ステップS104)。次いで、出力制御部353は、位置情報DB342を参照して、自動二輪車100の位置を示す情報を出力部330から出力させる(ステップS105)。
以下、第2実施形態について説明する。第1実施形態では、第2タイミングの判定処理を情報管理サーバ300で実行する例について説明した。第2実施形態では、第2タイミングの判定処理を自動二輪車100Aで実行する例について説明する。以下、第1実施形態との相違点を中心に説明する。
以下、第3実施形態について説明する。第1実施形態では、第2タイミングの判定処理を情報管理サーバ300で実行する例について説明した。第3実施形態では、第2タイミングの判定処理をユーザ端末装置200Aで実行する例について説明する。以下、第1実施形態との相違点を中心に説明する。
記憶装置と、
前記記憶装置に格納されたプログラムを実行するハードウェアプロセッサと、を備え、
前記ハードウェアプロセッサは、前記プログラムを実行することにより、
車両および前記車両の乗員が所持する端末装置のうち少なくとも一方を含む移動体から、前記移動体の位置を示す情報であって、前記移動体に搭載されている位置測位装置により第1タイミングにおいて測位された位置を示す位置情報を、ネットワークを介して取得し、
前記第1タイミングにおける状態からの変化を示す所定パラメータが所定条件を満たした第2タイミング以降で、前記位置情報が示す位置に前記移動体が存在していることを示す情報を出力部から出力する、
位置情報出力方法。
100 自動二輪車
200 ユーザ端末装置
300 情報管理サーバ
310 通信部
320 入力部
330 出力部
340 記憶部
350 処理部
351 データ管理部
352 出力情報生成部
353 出力制御部
354 移動距離演算部
355 経過時間演算部
356 移動速度推定部
357 提供情報生成部
Claims (7)
- コンピュータが、
車両(100)および前記車両の乗員が所持する端末装置(200)のうち少なくとも一方を含む移動体から、前記移動体の位置を示す情報であって、前記移動体に搭載されている位置測位装置(113、260)により第1タイミングにおいて測位された位置を示す位置情報を、ネットワークを介して取得し、
前記第1タイミングにおける状態からの変化を示す所定パラメータが所定条件を満たした第2タイミング以降で、前記位置情報を用いた演算を行うことなく前記第1タイミングにおいて測位された前記位置情報を出力部(330)から出力する、
位置情報出力方法。 - 前記コンピュータが、
前記所定パラメータが距離である場合、前記車両が第1タイミングにおける位置からの移動距離が所定値以上となった場合に、前記所定条件を満たすと判定し、
請求項1に記載の位置情報出力方法。 - 前記コンピュータが、
前記所定パラメータが時間である場合、前記車両が第1タイミングの時刻からの経過時間が所定値以上となった場合に、前記所定条件を満たすと判定する、
請求項1または2に記載の位置情報出力方法。 - 前記コンピュータが、
前記移動体に搭載されている検出部により検出された情報、あるいは、前記位置情報に基づいて、前記移動体の移動速度を取得し、
前記移動速度が所定値よりも小さい場合には、前記所定パラメータを距離として、前記車両が第1タイミングにおける位置からの移動距離が所定値以上となった場合に前記所定条件を満たすと判定し、
前記移動速度が前記所定値よりも大きい場合には、前記所定パラメータを時間として、前記車両が第1タイミングの時刻からの経過時間が所定値以上となった場合に前記所定条件を満たすと判定する、
請求項1から3のうちいずれか一項に記載の位置情報出力方法。 - 前記コンピュータが、
前記移動体の移動速度として、所定区間における平均値を取得する、
請求項4に記載の位置情報出力方法。 - 車両(100)および前記車両の乗員が所持する端末装置(200)のうち少なくとも一方を含む移動体と、ネットワークを介して前記移動体と通信する情報管理サーバ(300)とを備える位置情報出力システム(1)であって、
前記移動体は、前記移動体の位置を示す情報であって、前記移動体に搭載されている位置測位装置(113、260)により第1タイミングにおいて測位された位置を示す位置情報を、ネットワークを介して前記情報管理サーバに送信する通信部を(111、210)備え、
前記情報管理サーバは、前記第1タイミングにおける状態からの変化を示す所定パラメータが所定条件を満たした第2タイミング以降で、前記位置情報を用いた演算を行うことなく前記第1タイミングにおいて測位された前記位置情報を出力部(330)から出力する出力制御部(353)を備える、
位置情報出力システム。 - コンピュータに、
車両(100)および前記車両の乗員が所持する端末装置(200)のうち少なくとも一方を含む移動体から、前記移動体の位置を示す情報であって、前記移動体に搭載されている位置測位装置(113、260)により第1タイミングにおいて測位された位置を示す位置情報を、ネットワークを介して取得させ、
前記第1タイミングにおける状態からの変化を示す所定パラメータが所定条件を満たした第2タイミング以降で、前記位置情報を用いた演算を行うことなく前記第1タイミングにおいて測位された前記位置情報を出力部(330)から出力させる、
プログラム。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/013850 WO2022208728A1 (ja) | 2021-03-31 | 2021-03-31 | 位置情報出力方法、位置情報出力システム、およびプログラム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JPWO2022208728A1 JPWO2022208728A1 (ja) | 2022-10-06 |
| JPWO2022208728A5 JPWO2022208728A5 (ja) | 2023-10-06 |
| JP7635365B2 true JP7635365B2 (ja) | 2025-02-25 |
Family
ID=83458216
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023510021A Active JP7635365B2 (ja) | 2021-03-31 | 2021-03-31 | 位置情報出力方法、位置情報出力システム、およびプログラム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US12406581B2 (ja) |
| EP (1) | EP4318433A4 (ja) |
| JP (1) | JP7635365B2 (ja) |
| CN (1) | CN117063214A (ja) |
| WO (1) | WO2022208728A1 (ja) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015103025A (ja) | 2013-11-25 | 2015-06-04 | 富士通株式会社 | 経路情報処理装置、方法、及びプログラム |
| JP2016143232A (ja) | 2015-02-02 | 2016-08-08 | 株式会社インテック | 位置情報管理装置及び位置情報管理方法 |
| WO2019003399A1 (ja) | 2017-06-29 | 2019-01-03 | 本田技研工業株式会社 | 情報通信装置及び位置管理システム |
| JP2019075747A (ja) | 2017-10-18 | 2019-05-16 | トヨタ自動車株式会社 | 移動端末 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9342935B2 (en) * | 2013-01-04 | 2016-05-17 | Diamond 18 Ltd. | Smartphone based system for vehicle monitoring security |
| US10453023B2 (en) | 2014-05-28 | 2019-10-22 | Fedex Corporate Services, Inc. | Methods and node apparatus for adaptive node communication within a wireless node network |
| JP2019148968A (ja) * | 2018-02-27 | 2019-09-05 | パナソニックIpマネジメント株式会社 | 移動体支援装置、移動体支援システム及び移動体支援方法 |
| JP6725568B2 (ja) * | 2018-03-13 | 2020-07-22 | 本田技研工業株式会社 | 車両制御装置、車両、車両制御方法およびプログラム |
| EP3806063A4 (en) * | 2018-06-08 | 2021-06-23 | Nissan Motor Co., Ltd. | VEHICLE MANAGEMENT SYSTEM, VEHICLE MANAGEMENT DEVICE, AND VEHICLE MANAGEMENT PROCEDURE, AND PROCEDURE AND VEHICLE MANAGEMENT DEVICE |
| JP2021033667A (ja) * | 2019-08-26 | 2021-03-01 | パイオニア株式会社 | 地図データ生成方法 |
| JP7012693B2 (ja) * | 2019-09-24 | 2022-01-28 | 本田技研工業株式会社 | 情報処理装置、車両システム、情報処理方法、およびプログラム |
-
2021
- 2021-03-31 US US18/284,559 patent/US12406581B2/en active Active
- 2021-03-31 WO PCT/JP2021/013850 patent/WO2022208728A1/ja not_active Ceased
- 2021-03-31 JP JP2023510021A patent/JP7635365B2/ja active Active
- 2021-03-31 EP EP21934895.0A patent/EP4318433A4/en not_active Withdrawn
- 2021-03-31 CN CN202180096450.3A patent/CN117063214A/zh active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015103025A (ja) | 2013-11-25 | 2015-06-04 | 富士通株式会社 | 経路情報処理装置、方法、及びプログラム |
| JP2016143232A (ja) | 2015-02-02 | 2016-08-08 | 株式会社インテック | 位置情報管理装置及び位置情報管理方法 |
| WO2019003399A1 (ja) | 2017-06-29 | 2019-01-03 | 本田技研工業株式会社 | 情報通信装置及び位置管理システム |
| JP2019075747A (ja) | 2017-10-18 | 2019-05-16 | トヨタ自動車株式会社 | 移動端末 |
Also Published As
| Publication number | Publication date |
|---|---|
| US12406581B2 (en) | 2025-09-02 |
| EP4318433A4 (en) | 2024-05-01 |
| CN117063214A (zh) | 2023-11-14 |
| WO2022208728A1 (ja) | 2022-10-06 |
| JPWO2022208728A1 (ja) | 2022-10-06 |
| EP4318433A1 (en) | 2024-02-07 |
| US20240177605A1 (en) | 2024-05-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4913683B2 (ja) | 危険度管理システム、サーバ装置及び危険度管理方法 | |
| US20200378781A1 (en) | Predictive annotation of relevant road information based on vehicle location and identity | |
| CA3009832C (en) | Vehicle speed control system | |
| JP2019074803A (ja) | サーバ装置および車両システム | |
| US20200053526A1 (en) | In-vehicle device, mobile terminal device, recognition support system, recognition support method, and recognition support program | |
| JP3801139B2 (ja) | 移動体間通信システム及び車両用運転補助装置 | |
| JP7635365B2 (ja) | 位置情報出力方法、位置情報出力システム、およびプログラム | |
| JP6536445B2 (ja) | 車両用通信制御装置 | |
| JP7496184B2 (ja) | 運転支援装置 | |
| JP2020148524A (ja) | 地図情報配信システム及び車両 | |
| CN111347968B (zh) | 信息提供装置、车辆、驾驶辅助系统、地图生成装置、驾驶辅助装置、以及驾驶辅助方法 | |
| US12511998B2 (en) | Location information output method, location information output system, and program | |
| JP2023048308A (ja) | 車両支援サーバ、車両支援サーバの処理方法、及びプログラム | |
| JP2005062932A (ja) | サーバ | |
| JP2014109948A (ja) | 情報伝達装置、情報伝達システム | |
| US12583485B2 (en) | Driving assistance device, driving assistance method, and non-transitory computer readable medium storing driving assistance program | |
| JP2024020092A (ja) | 運転操作判定装置、運転操作判定システム、運転操作判定方法及びプログラム | |
| JP7417891B2 (ja) | 報知制御装置、報知装置、報知制御方法、報知制御プログラム、および、車両情報送信装置 | |
| JP7848728B2 (ja) | 運転支援システム | |
| JP7767850B2 (ja) | 情報処理システム | |
| JP2022143024A (ja) | 車両および情報管理システム | |
| WO2023281725A1 (ja) | 運転支援システム、車載制御装置、運転支援方法、および、運転支援プログラム | |
| JP2021144630A (ja) | 通信装置、通信システム、車両、通信プログラム、及び通信方法 | |
| EP4394323A1 (en) | Method, apparatus, and computer program product for at least approximate real-time intelligent gap placement within mobility data using junctions inferred by features of the mobility data | |
| JP6471675B2 (ja) | 運転支援システム、情報送信装置、及び、運転支援装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A524 | Written submission of copy of amendment under article 19 pct |
Free format text: JAPANESE INTERMEDIATE CODE: A527 Effective date: 20230711 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230711 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20241001 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20241126 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20250114 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250212 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7635365 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |