JP7635759B2 - オペレータ管理システム、オペレータ管理方法、オペレータ管理プログラム - Google Patents
オペレータ管理システム、オペレータ管理方法、オペレータ管理プログラム Download PDFInfo
- Publication number
- JP7635759B2 JP7635759B2 JP2022117935A JP2022117935A JP7635759B2 JP 7635759 B2 JP7635759 B2 JP 7635759B2 JP 2022117935 A JP2022117935 A JP 2022117935A JP 2022117935 A JP2022117935 A JP 2022117935A JP 7635759 B2 JP7635759 B2 JP 7635759B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- remote support
- operator
- support
- remote
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images














Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/06—Resources, workflows, human or project management; Enterprise or organisation planning; Enterprise or organisation modelling
- G06Q10/063—Operations research, analysis or management
- G06Q10/0631—Resource planning, allocation, distributing or scheduling for enterprises or organisations
- G06Q10/06311—Scheduling, planning or task assignment for a person or group
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/22—Command input arrangements
- G05D1/221—Remote-control arrangements
- G05D1/227—Handing over between remote control and on-board control; Handing over between remote control arrangements
- G05D1/2279—Handing over between remote control and on-board control; Handing over between remote control arrangements involving allocation of control between two or more remote operators, e.g. tele-assistance
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0011—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots associated with a remote control arrangement
- G05D1/0027—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots associated with a remote control arrangement involving a plurality of vehicles, e.g. fleet or convoy travelling
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F9/00—Arrangements for program control, e.g. control units
- G06F9/06—Arrangements for program control, e.g. control units using stored programs, i.e. using an internal store of processing equipment to receive or retain programs
- G06F9/46—Multiprogramming arrangements
- G06F9/50—Allocation of resources, e.g. of the central processing unit [CPU]
- G06F9/5005—Allocation of resources, e.g. of the central processing unit [CPU] to service a request
- G06F9/5027—Allocation of resources, e.g. of the central processing unit [CPU] to service a request the resource being a machine, e.g. CPUs, Servers, Terminals
- G06F9/5038—Allocation of resources, e.g. of the central processing unit [CPU] to service a request the resource being a machine, e.g. CPUs, Servers, Terminals considering the execution order of a plurality of tasks, e.g. taking priority or time dependency constraints into consideration
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/04—Forecasting or optimisation specially adapted for administrative or management purposes, e.g. linear programming or "cutting stock problem"
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/06—Resources, workflows, human or project management; Enterprise or organisation planning; Enterprise or organisation modelling
- G06Q10/063—Operations research, analysis or management
- G06Q10/0631—Resource planning, allocation, distributing or scheduling for enterprises or organisations
- G06Q10/06312—Adjustment or analysis of established resource schedule, e.g. resource or task levelling, or dynamic rescheduling
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/06—Resources, workflows, human or project management; Enterprise or organisation planning; Enterprise or organisation modelling
- G06Q10/063—Operations research, analysis or management
- G06Q10/0631—Resource planning, allocation, distributing or scheduling for enterprises or organisations
- G06Q10/06316—Sequencing of tasks or work
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2105/00—Specific applications of the controlled vehicles
- G05D2105/20—Specific applications of the controlled vehicles for transportation
- G05D2105/22—Specific applications of the controlled vehicles for transportation of humans
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2107/00—Specific environments of the controlled vehicles
- G05D2107/10—Outdoor regulated spaces
- G05D2107/13—Spaces reserved for vehicle traffic, e.g. roads, regulated airspace or regulated waters
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2109/00—Types of controlled vehicles
- G05D2109/10—Land vehicles
Landscapes
- Business, Economics & Management (AREA)
- Engineering & Computer Science (AREA)
- Human Resources & Organizations (AREA)
- Economics (AREA)
- Strategic Management (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Entrepreneurship & Innovation (AREA)
- Theoretical Computer Science (AREA)
- General Business, Economics & Management (AREA)
- Tourism & Hospitality (AREA)
- Development Economics (AREA)
- Game Theory and Decision Science (AREA)
- Marketing (AREA)
- Operations Research (AREA)
- Quality & Reliability (AREA)
- Educational Administration (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Aviation & Aerospace Engineering (AREA)
- Automation & Control Theory (AREA)
- Software Systems (AREA)
- General Engineering & Computer Science (AREA)
- Traffic Control Systems (AREA)
Description
以下、本実施形態に係るオペレータ管理システムの概要について説明する。図1は、本実施形態に係るオペレータ管理システム10の概要について説明するための概念図である。オペレータ管理システム10は、遠隔支援要求を発信する複数の車両1に対する複数の遠隔支援オペレータ2の割り当てを管理する機能(以下、「オペレータ管理機能」とも称する。)を提供する。

以下、本実施形態に係るオペレータ管理システム10に関して、車両1、管理サーバ100、及び遠隔支援装置200の構成について説明する。なお、以下の説明において、車両1は、運転計画を遠隔支援要求として発信する自動運転車であるとする。
まず車両1(自動運転車)の構成について説明する。図6は、車両1の構成を示すブロック図である。車両1は、1又は複数のセンサ310と、1又は複数の通信装置320と、ECU類330と、1又は複数のアクチュエータ340と、を備えている。ECU類330は、1又は複数のセンサ310、1又は複数の通信装置320、及び1又は複数のアクチュエータ340と、互いに情報を伝達することができるように構成されている。典型的には、それぞれ、CAN(Controller Area Network)等で構成された車載ネットワークに接続している。
次に管理サーバ100の構成について説明する。図8は、管理サーバ100の構成を示すブロック図である。管理サーバ100は、メモリ110と、プロセッサ120と、通信装置130と、を含むコンピュータである。
複数の遠隔支援オペレータ2の各々について、どの車両1のどのような遠隔支援要求を処理しているかと、遠隔支援の対象とする車両1の割当優先度と、を管理する。例えば、支援状況管理処理部P122は、以下の表2に示すような支援状況テーブルをデータ113として管理する。

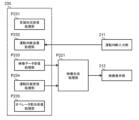
次に遠隔支援装置200の構成について説明する。図10は、遠隔支援装置200の構成を示すブロック図である。遠隔支援装置200は、HMI210と、処理装置220と、通信装置230と、を備えている。
以下、本実施形態に係るオペレータ管理システム10に関して、車両1、管理サーバ100、及び遠隔支援装置200において実行される処理について説明する。
まず車両において実行される処理について説明する。図12は、車両1において実行される処理を示すシーケンス図である。
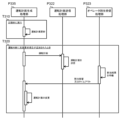
次に管理サーバ100において実行される処理について説明する。図13及び図14は、管理サーバ100において実行される処理を示すシーケンス図である。ここで、図13及び図14は、「A」で接続しており1つのシーケンス図を示している。また図13及び図14において、支援状況管理処理部P122は、表2に示すような支援状況テーブルにより複数の遠隔支援オペレータ2の支援状況を管理するとする。
次に遠隔支援装置200において実行される処理について説明する。図15及び図16は、遠隔支援装置200において実行される処理を示すシーケンス図である。ここで、図15は、管理サーバ100により遠隔支援オペレータの割り当てが行われたときの処理を示す。図16は、遠隔支援オペレータ2が運転判断を入力したときの処理を示す。
以上説明したように、本実施形態によれば、複数の車両1の各々について遠隔支援要求の内容に応じた割当優先度の設定又は更新が行われる。そして、複数の車両1の数が複数の遠隔支援オペレータ2の数より多い場合であって、かつ遠隔支援オペレータ2の割り当てが行われていない第1車両の割当優先度が遠隔支援オペレータ2の割り当てが行われている第2車両の割当優先度より高い場合、第2車両に割り当てられている遠隔支援オペレータ2が第1車両に割り当てられる。これにより、遠隔支援の緊急性の度合いが高い車両1を優先して処理するように複数の遠隔支援オペレータ2の割り当てを行うことができる。延いては、緊急時の対応の迅速化や交通流の円滑化等の観点を基に、適切に複数の遠隔支援オペレータ2の割り当てを行うことができる。
本実施形態に係るオペレータ管理システム10は、以下のように変形した態様を採用しても良い。
2 遠隔支援オペレータ
10 オペレータ管理システム
100 管理サーバ
110 メモリ
111 コンピュータプログラム(オペレータ管理プログラム)
112 インストラクション
120 プロセッサ
Claims (7)
- 1又は複数の支援要求項目を含む遠隔支援要求を発信する複数の車両に対する複数の遠隔支援オペレータの割り当てを管理するオペレータ管理システムであって、
1又は複数のプロセッサと、
前記1又は複数のプロセッサと結合され、前記1又は複数のプロセッサにより実行可能な複数のインストラクションを記憶するメモリと、
を含み、
前記複数のインストラクションは、前記1又は複数のプロセッサに、
前記複数の車両の各々について前記遠隔支援要求の前記1又は複数の支援要求項目に応じた割当優先度を設定又は更新する処理と
前記複数の車両の数が前記複数の遠隔支援オペレータの数より多い場合であって、かつ前記複数の車両のうち前記複数の遠隔支援オペレータの割り当てが行われていない車両の1つである第1車両の前記割当優先度が前記複数の車両のうち前記複数の遠隔支援オペレータの割り当てが行われている車両の1つである第2車両の前記割当優先度よりも高い場合に、前記第2車両に割り当てられている遠隔支援オペレータを前記第1車両に割り当てる処理と、
を実行させるように構成されている
ことを特徴とするオペレータ管理システム。 - 請求項1に記載のオペレータ管理システムであって、
前記割当優先度を設定又は更新する処理は、
前記遠隔支援要求を新たに取得したことを受けて、前記複数の車両の各々について前記割当優先度を設定又は更新することを含む
ことを特徴とするオペレータ管理システム。 - 請求項1又は請求項2に記載のオペレータ管理システムであって、
前記割当優先度を設定又は更新する処理は、
前記1又は複数の支援要求項目の各々について支援優先度を算出することと、
前記支援優先度に基づいて、前記割当優先度を設定又は更新することと、
を含む
ことを特徴とするオペレータ管理システム。 - 請求項3に記載のオペレータ管理システムであって、
前記割当優先度を設定又は更新する処理は、
前記1又は複数の支援要求項目の一部が前記遠隔支援オペレータに処理されたことを受けて、前記複数の車両の各々について前記割当優先度を設定又は更新することを含む
ことを特徴とするオペレータ管理システム。 - 請求項4に記載のオペレータ管理システムであって、
前記複数の車両の各々は、
複数の運転判断の組み合わせである運転計画に従って走行する自動運転車であり、
前記複数の運転判断に前記1又は複数の支援要求項目が含まれることを受けて、前記運転計画を前記遠隔支援要求として発信するように構成されている
ことを特徴とするオペレータ管理システム。 - 1又は複数の支援要求項目を含む遠隔支援要求を発信する複数の車両に対する複数の遠隔支援オペレータの割り当てをコンピュータにより管理するオペレータ管理方法であって、
前記複数の車両の各々について前記遠隔支援要求の前記1又は複数の支援要求項目に応じた割当優先度を設定又は更新することと、
前記複数の車両の数が前記複数の遠隔支援オペレータの数より多い場合であって、かつ前記複数の車両のうち前記複数の遠隔支援オペレータの割り当てが行われていない車両の1つである第1車両の前記割当優先度が前記複数の車両のうち前記複数の遠隔支援オペレータの割り当てが行われている車両の1つである第2車両の前記割当優先度よりも高い場合に、前記第2車両に割り当てられている遠隔支援オペレータを前記第1車両に割り当てることと、
を含む
ことを特徴とするオペレータ管理方法。 - 1又は複数の支援要求項目を含む遠隔支援要求を発信する複数の車両に対する複数の遠隔支援オペレータの割り当ての管理をコンピュータに実行させるオペレータ管理プログラムであって、
前記複数の車両の各々について前記遠隔支援要求の前記1又は複数の支援要求項目に応じた割当優先度を設定又は更新する処理と
前記複数の車両の数が前記複数の遠隔支援オペレータの数より多い場合であって、かつ前記複数の車両のうち前記複数の遠隔支援オペレータの割り当てが行われていない車両の1つである第1車両の前記割当優先度が前記複数の車両のうち前記複数の遠隔支援オペレータの割り当てが行われている車両の1つである第2車両の前記割当優先度よりも高い場合に、前記第2車両に割り当てられている遠隔支援オペレータを前記第1車両に割り当てる処理と、
を前記コンピュータに実行させるように構成されている
ことを特徴とするオペレータ管理プログラム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022117935A JP7635759B2 (ja) | 2022-07-25 | 2022-07-25 | オペレータ管理システム、オペレータ管理方法、オペレータ管理プログラム |
| US18/338,507 US20240028029A1 (en) | 2022-07-25 | 2023-06-21 | Operator management system, operator management method, and non-transitory computer readable recording medium |
| CN202310784093.0A CN117455132A (zh) | 2022-07-25 | 2023-06-28 | 操作员管理系统、操作员管理方法、计算机可读记录介质 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022117935A JP7635759B2 (ja) | 2022-07-25 | 2022-07-25 | オペレータ管理システム、オペレータ管理方法、オペレータ管理プログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2024015697A JP2024015697A (ja) | 2024-02-06 |
| JP7635759B2 true JP7635759B2 (ja) | 2025-02-26 |
Family
ID=89577595
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022117935A Active JP7635759B2 (ja) | 2022-07-25 | 2022-07-25 | オペレータ管理システム、オペレータ管理方法、オペレータ管理プログラム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20240028029A1 (ja) |
| JP (1) | JP7635759B2 (ja) |
| CN (1) | CN117455132A (ja) |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019185279A (ja) | 2018-04-06 | 2019-10-24 | 株式会社デンソー | 管制装置 |
| WO2022014174A1 (ja) | 2020-07-15 | 2022-01-20 | パナソニックIpマネジメント株式会社 | 情報処理方法及び情報処理システム |
-
2022
- 2022-07-25 JP JP2022117935A patent/JP7635759B2/ja active Active
-
2023
- 2023-06-21 US US18/338,507 patent/US20240028029A1/en active Pending
- 2023-06-28 CN CN202310784093.0A patent/CN117455132A/zh active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019185279A (ja) | 2018-04-06 | 2019-10-24 | 株式会社デンソー | 管制装置 |
| WO2022014174A1 (ja) | 2020-07-15 | 2022-01-20 | パナソニックIpマネジメント株式会社 | 情報処理方法及び情報処理システム |
Also Published As
| Publication number | Publication date |
|---|---|
| US20240028029A1 (en) | 2024-01-25 |
| JP2024015697A (ja) | 2024-02-06 |
| CN117455132A (zh) | 2024-01-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11847870B2 (en) | Vehicle management system | |
| EP4041608B1 (en) | Methods and systems for lane changes using a multi-corridor representation of local route regions | |
| EP3714345B1 (en) | Object interaction prediction systems and methods for autonomous vehicles | |
| US9076338B2 (en) | Travel control plan generation system and computer program | |
| EP4187342B1 (en) | Teleoperable vehicle and system | |
| US12242266B2 (en) | Remote assistance method, remote assistance system, and non-transitory computer-readable storage medium | |
| CN111301412A (zh) | 队列行驶系统 | |
| EP4116945B1 (en) | Vehicle management system | |
| US20230058508A1 (en) | System amd method for providing situational awareness interfaces for a vehicle occupant | |
| KR102785211B1 (ko) | 원격 조작 의뢰 시스템, 원격 조작 의뢰 방법, 및 비일시적 기억 매체 | |
| CN116507541B (zh) | 在自动驾驶中预测其他道路使用者的反应的方法和系统 | |
| KR20220088791A (ko) | 통신 네트워크에서 도로 사용자와 적어도 하나의 다른 도로 사용자 간에 운전 조작을 조정하기 위한 운전 조작 메시지를 제공하는 방법 | |
| CN115309142A (zh) | 远程支援管理系统、远程支援管理方法以及远程支援管理程序 | |
| JP2021056745A (ja) | 監視センタ、監視システム及び方法 | |
| CN117944684A (zh) | 变道轨迹规划方法和装置、存储介质及电子设备 | |
| JP7635759B2 (ja) | オペレータ管理システム、オペレータ管理方法、オペレータ管理プログラム | |
| WO2021229671A1 (ja) | 走行支援装置および走行支援方法 | |
| CN113306568B (zh) | 自动车辆和操作自动车辆的方法 | |
| US12424095B2 (en) | Parking assistance method, parking assistance apparatus, and non-transitory computer readable recording medium | |
| US20240240966A1 (en) | Information providing device and information providing method | |
| US11993205B2 (en) | Remote driving taxi system, remote driving taxi control method, and remote driving taxi management device | |
| US12204327B2 (en) | Remote driving taxi system, mobility service management method, and remote driving taxi management device | |
| EP3845991B1 (en) | Method for invoking a tele-operated driving session, apparatus for performing the steps of the method, vehicle and computer program | |
| CN115314670A (zh) | 远程监视装置、远程监视系统以及远程监视方法 | |
| US12399493B2 (en) | Remote assistance system and remote assistance method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240305 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20240911 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240924 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20241121 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20250114 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250127 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7635759 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |