JP7642401B2 - 作業車両の周辺監視装置および作業車両 - Google Patents
作業車両の周辺監視装置および作業車両 Download PDFInfo
- Publication number
- JP7642401B2 JP7642401B2 JP2021032744A JP2021032744A JP7642401B2 JP 7642401 B2 JP7642401 B2 JP 7642401B2 JP 2021032744 A JP2021032744 A JP 2021032744A JP 2021032744 A JP2021032744 A JP 2021032744A JP 7642401 B2 JP7642401 B2 JP 7642401B2
- Authority
- JP
- Japan
- Prior art keywords
- risk
- work vehicle
- person
- monitoring device
- vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000012806 monitoring device Methods 0.000 title claims description 24
- 238000001514 detection method Methods 0.000 claims description 12
- 238000010586 diagram Methods 0.000 description 12
- 230000008859 change Effects 0.000 description 4
- 238000005516 engineering process Methods 0.000 description 4
- 238000012545 processing Methods 0.000 description 4
- 230000006870 function Effects 0.000 description 3
- 238000000034 method Methods 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 230000000007 visual effect Effects 0.000 description 3
- 238000013528 artificial neural network Methods 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 230000005484 gravity Effects 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 230000004397 blinking Effects 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 230000014509 gene expression Effects 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 238000012502 risk assessment Methods 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 230000032258 transport Effects 0.000 description 1
- 230000016776 visual perception Effects 0.000 description 1
Images






Landscapes
- Forklifts And Lifting Vehicles (AREA)
- Traffic Control Systems (AREA)
Description
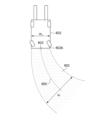
図4は、衝突予測時間にもとづく危険度R1の決定を説明する図である。危険度決定手段120は、将来予測軌跡900にもとづいて、人910と衝突するまでの予測時間を計算し、予測時間が短いほど、衝突予測時間にもとづく危険度R1を高くする。
危険度決定手段120は、衝突予測距離にもとづいて、危険度R2を算出する。衝突予測距離は、図4における基準点603と交点912の間の、将来予測軌跡900に沿った距離と把握できる。
図6は、将来予測軌跡との距離にもとづく危険度R3を説明する図である。上述の衝突予測距離にもとづく危険度R2では、人910が車体通過予測範囲902の外側に位置するときの衝突のリスクを考慮できない。そこで危険度決定手段120は、将来予測軌跡900と、人910との距離dにもとづいて、危険度R3を決定する。距離dは、人910から将来予測軌跡900に下ろした垂線の長さである。
図7は、死角危険度R4を説明する図である。フォークリフトには、それ特有のオペレータから見えにくい範囲(死角)が存在する。たとえば、ヘッドガード、マスト、荷物によって遮られる範囲や、オペレータの真後ろなどが死角として例示される。これらの死角領域920を予めゾーン分けした死角マップが定義されている。危険度決定手段120は、死角マップを参照して、人910がどの領域920に存在するかによって、危険度R4を算出する。
危険度決定手段120は、荷重や揚高、進行方向(タイヤ角やシフトレバーの状態)などにもとづいて、車体602の動的な安定度(不安定度)を算出し、安定度にもとづいた危険度R5を算出する。危険度決定手段120は、既知である車重、重心位置などの車体情報と、荷役状況や車速、前後左右の加速度の現在値から、転倒の危険性を算出することができる。
必要制動距離が短い場合には、ブレーキによって衝突を回避できる可能性が高く、必要制動距離が長い場合には、ブレーキによる衝突回避が難しくなる。
危険度決定手段120は、警告対象である人の位置する高さと自車の位置する高さの高低差にもとづいた危険度R7を算出する。たとえば、人が存在するプラットフォームが、フォークリフト600が走行するトラックヤードよりも1.5m高い場合、衝突の可能性は低いといえる。そこで危険度決定手段120は、自車の位置する高さと人の位置する高さが同じ場合には、危険度R7を高く、高低差がある程度大きい場合には、危険度R8を低くすることができる。
危険度R1を算出することにより、衝突までの予測時間が長く、回避が十分に可能な状況における警報を減らし、あるいは警報の程度を軽くすることで、オペレータの警告慣れを防ぐことができる。
危険度R1のみでは、車両が停止しているときに、衝突のリスクを正しく評価できない場合がある。たとえば、車両が停止していても、車両の真後ろに人が位置する場合には、車両が動き出した直後に、衝突することとなり、回避は難しい。そこで危険度R2を算出することにより、停止状態の車両が動き出した直後の衝突のリスクを評価することができる。
危険度R3を算出することにより、現在の車両状態では衝突の可能性は低いが、将来の舵角の変更にともなう衝突の可能性の変化を考慮することが可能となる。
死角は潜在的な危険因子となる。危険度R4を算出することで警告漏れを防ぐことができる。オペレータが見落としやすい位置の人に対する危険度を高くすることで、距離や時間に余裕があるうちから、警告することが可能となる。
車体の動的な安定度を考慮した転倒危険度R5を算出することで、算出しない場合比べて、同じ状況での危険性をより正確に評価できる。
制動距離危険度R6を算出することで、回避に与えられる距離的、時間的な猶予を考慮した警告が可能となる。
高さ危険度R7を算出することで、衝突の可能性が著しく低い場合の警告をなくし、あるいは警報の程度を軽くすることで、オペレータの警告慣れを防ぐことができる。
実施形態では、人検知手段110によって後方を監視し、後退時の警告を行うものとしたが、それに代えて、あるいはそれに加えて、人検知手段110によって車体の前方を監視し、前進時の警告を行ってもよい。
実施形態では作業車両としてフォークリフトを例に説明したが、本発明の適用はその限りでなく、ハンドリフト(ハンドパレット)、フォークローダー(フォーク付きのホイルローダー)などに適用することができる。
Claims (9)
- 作業車両の周辺監視装置であって、
前記作業車両の周辺に存在する人を検知する人検知手段と、
前記作業車両の将来予測軌跡を算出し、前記作業車両が将来通過しうる車体通過予測範囲を、当該将来予測軌跡を基準として車体から離れるにしたがって幅が徐々に広くなる範囲として設定し、前記車体通過予測範囲と前記検知された人との関係にもとづいて危険度を決定する危険度決定手段と、
前記危険度に対応する態様で警報を行う警報手段と、
を備え、
前記危険度決定手段は、前記検知された人の将来予測軌跡を算出し、前記作業車両の将来予測軌跡と前記検知された人の将来予測軌跡から求まる前記検知された人との接触までの時間にもとづいて前記危険度を決定し、
前記危険度決定手段は、前記検知された人の位置する高さと前記作業車両の位置する高さとの高低差にもとづいて、前記危険度を決定することを特徴とする周辺監視装置。 - 作業車両の周辺監視装置であって、
前記作業車両の周辺に存在する人を検知する人検知手段と、
前記作業車両の将来予測軌跡を算出し、前記作業車両が将来通過しうる車体通過予測範囲を、当該将来予測軌跡を基準として設定し、前記車体通過予測範囲の側端部を走行中に前記作業車両が外側に転倒した場合に進入しうる領域を車体転倒予測領域として設定し、前記車体通過予測範囲および前記車体転倒予測領域と、前記検知された人との関係にもとづいて危険度を決定する危険度決定手段と、
前記危険度に対応する態様で警報を行う警報手段と、
を備えることを特徴とする周辺監視装置。 - 前記危険度決定手段は、前記作業車両の将来予測軌跡と前記検知された人との距離にもとづいて前記危険度を決定することを特徴とする請求項1または2に記載の周辺監視装置。
- 死角領域が予め定義されており、前記危険度決定手段は、前記検知された人と前記死角領域の位置関係にもとづいて前記危険度を決定することを特徴とする請求項1から3のいずれかに記載の周辺監視装置。
- 前記危険度決定手段は、荷役状況にもとづいて前記危険度を決定することを特徴とする請求項1から4のいずれかに記載の周辺監視装置。
- 前記危険度決定手段は、前記検知された人の位置する高さと前記作業車両の位置する高さとの高低差にもとづいて、前記危険度を決定することを特徴とする請求項2に記載の周辺監視装置。
- 作業車両の周辺監視装置であって、
前記作業車両の周辺に存在する人を検知する人検知手段と、
前記作業車両の将来予測軌跡を算出し、前記作業車両の将来予測軌跡と前記検知された人との関係にもとづいて危険度を決定する危険度決定手段と、
前記危険度に対応する態様で警報を行う警報手段と、
を備え、
前記危険度決定手段は、前記検知された人の位置する高さと前記作業車両の位置する高さとの高低差にもとづいて、前記危険度を決定することを特徴とする周辺監視装置。 - 前記警報手段は、前記危険度にもとづいて、制動に介入することを特徴とする請求項1から7のいずれかに記載の周辺監視装置。
- 請求項1から8のいずれかに記載の周辺監視装置を備えることを特徴とする作業車両。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021032744A JP7642401B2 (ja) | 2021-03-02 | 2021-03-02 | 作業車両の周辺監視装置および作業車両 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021032744A JP7642401B2 (ja) | 2021-03-02 | 2021-03-02 | 作業車両の周辺監視装置および作業車両 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022133832A JP2022133832A (ja) | 2022-09-14 |
| JP7642401B2 true JP7642401B2 (ja) | 2025-03-10 |
Family
ID=83229962
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021032744A Active JP7642401B2 (ja) | 2021-03-02 | 2021-03-02 | 作業車両の周辺監視装置および作業車両 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7642401B2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2025037583A1 (ja) * | 2023-08-14 | 2025-02-20 | 株式会社豊田自動織機 | 産業車両の制御装置、産業車両、及び産業車両の制御方法 |
| JP7694627B2 (ja) * | 2023-10-13 | 2025-06-18 | いすゞ自動車株式会社 | 運転支援装置、運転支援方法及びプログラム |
| JP2026052488A (ja) * | 2024-09-11 | 2026-03-24 | 三菱ロジスネクスト株式会社 | アラートシステムおよび産業車両 |
| JP7712001B1 (ja) * | 2024-12-09 | 2025-07-23 | 株式会社熊建 | 工事用安全装置 |
| JP7744113B1 (ja) * | 2025-06-26 | 2025-09-25 | 三菱ロジスネクスト株式会社 | 荷役車両 |
Citations (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001195699A (ja) | 2000-01-14 | 2001-07-19 | Yazaki Corp | 車両用周辺監視装置及び、車両用衝突危険判断処理プログラムを記録した記録媒体 |
| JP2004091118A (ja) | 2002-08-30 | 2004-03-25 | Nippon Yusoki Co Ltd | フォークリフト |
| JP2006188353A (ja) | 2005-01-07 | 2006-07-20 | Sumitomonacco Materials Handling Co Ltd | 作業車両管理システム |
| JP2007034684A (ja) | 2005-07-27 | 2007-02-08 | Nissan Motor Co Ltd | 車両の障害物表示装置 |
| JP2012014257A (ja) | 2010-06-29 | 2012-01-19 | Toyota Motor Corp | 警報装置 |
| JP2013220809A (ja) | 2012-04-19 | 2013-10-28 | Mitsubishi Motors Corp | 車両用運転支援装置 |
| US20140114526A1 (en) | 2012-10-22 | 2014-04-24 | Sick Ag | Safety apparatus for a vehicle |
| JP2015170284A (ja) | 2014-03-10 | 2015-09-28 | 株式会社日立製作所 | フォークリフト型無人搬送車、その制御方法および制御装置 |
| WO2018207303A1 (ja) | 2017-05-11 | 2018-11-15 | 三菱電機株式会社 | 車載用監視カメラ装置 |
| JP2019089636A (ja) | 2017-11-15 | 2019-06-13 | 株式会社豊田自動織機 | 安全装置 |
| JP2019105995A (ja) | 2017-12-12 | 2019-06-27 | 株式会社豊田自動織機 | 自動運転フォークリフト |
| JP2020132142A (ja) | 2019-02-13 | 2020-08-31 | 富士通株式会社 | 車両の経路偏差の意図の予測 |
| JP2020144417A (ja) | 2019-03-04 | 2020-09-10 | アイシン・エィ・ダブリュ株式会社 | リスク取得システム、リスク表示システムおよびリスク取得プログラム |
| JP2021028266A (ja) | 2019-08-09 | 2021-02-25 | 株式会社小松製作所 | 作業機械及び作業機械の制御方法 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2881683B2 (ja) * | 1995-07-07 | 1999-04-12 | 東急車輛製造株式会社 | 自動走行車の障害物検知方法及び装置 |
-
2021
- 2021-03-02 JP JP2021032744A patent/JP7642401B2/ja active Active
Patent Citations (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001195699A (ja) | 2000-01-14 | 2001-07-19 | Yazaki Corp | 車両用周辺監視装置及び、車両用衝突危険判断処理プログラムを記録した記録媒体 |
| JP2004091118A (ja) | 2002-08-30 | 2004-03-25 | Nippon Yusoki Co Ltd | フォークリフト |
| JP2006188353A (ja) | 2005-01-07 | 2006-07-20 | Sumitomonacco Materials Handling Co Ltd | 作業車両管理システム |
| JP2007034684A (ja) | 2005-07-27 | 2007-02-08 | Nissan Motor Co Ltd | 車両の障害物表示装置 |
| JP2012014257A (ja) | 2010-06-29 | 2012-01-19 | Toyota Motor Corp | 警報装置 |
| JP2013220809A (ja) | 2012-04-19 | 2013-10-28 | Mitsubishi Motors Corp | 車両用運転支援装置 |
| US20140114526A1 (en) | 2012-10-22 | 2014-04-24 | Sick Ag | Safety apparatus for a vehicle |
| JP2015170284A (ja) | 2014-03-10 | 2015-09-28 | 株式会社日立製作所 | フォークリフト型無人搬送車、その制御方法および制御装置 |
| WO2018207303A1 (ja) | 2017-05-11 | 2018-11-15 | 三菱電機株式会社 | 車載用監視カメラ装置 |
| JP2019089636A (ja) | 2017-11-15 | 2019-06-13 | 株式会社豊田自動織機 | 安全装置 |
| JP2019105995A (ja) | 2017-12-12 | 2019-06-27 | 株式会社豊田自動織機 | 自動運転フォークリフト |
| JP2020132142A (ja) | 2019-02-13 | 2020-08-31 | 富士通株式会社 | 車両の経路偏差の意図の予測 |
| JP2020144417A (ja) | 2019-03-04 | 2020-09-10 | アイシン・エィ・ダブリュ株式会社 | リスク取得システム、リスク表示システムおよびリスク取得プログラム |
| JP2021028266A (ja) | 2019-08-09 | 2021-02-25 | 株式会社小松製作所 | 作業機械及び作業機械の制御方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2022133832A (ja) | 2022-09-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7642401B2 (ja) | 作業車両の周辺監視装置および作業車両 | |
| US12434692B2 (en) | Saddle-ride vehicle with autonomous braking and method of operating same | |
| JP7393730B2 (ja) | 車両の走行制御装置 | |
| KR102660838B1 (ko) | 차량 및 그 제어방법 | |
| US9802528B2 (en) | Driver assist device and industrial truck with driver assist device | |
| KR101478068B1 (ko) | 차량 충돌 방지 장치 및 그 방법 | |
| JP2019003620A (ja) | 後方から近づいて来る車両を検知する装置を備えたオートバイ | |
| KR102304018B1 (ko) | 자율주행 차량의 충돌 방지 방법, 장치 및 컴퓨터프로그램 | |
| JP4019948B2 (ja) | 車両の接触防止システム | |
| JP2021194970A (ja) | 車両用運転支援装置 | |
| KR20140052678A (ko) | 차량용 충돌 방지 시스템 및 그 제어방법 | |
| JP2020090381A (ja) | フォークリフトの注意喚起システム、及びフォークリフト | |
| CN109835326A (zh) | 用于辅助执行车辆的倒车转弯操纵的方法和机构 | |
| JP2021028266A (ja) | 作業機械及び作業機械の制御方法 | |
| US12168598B2 (en) | Vehicle-to-vehicle communication for trajectory awareness of a material handling vehicle | |
| KR20210083516A (ko) | 안전사고 방지 기능이 탑재된 지게차 | |
| KR101511860B1 (ko) | 운전보조시스템 및 그 제어방법 | |
| JP4961912B2 (ja) | 車外ユーザ保護機能付車両 | |
| TWM653988U (zh) | 人車安全輔助系統 | |
| JP7794548B1 (ja) | 脇見防止システム | |
| KR20220169506A (ko) | 열화상 카메라를 이용한 지게차 주행 안전시스템 및 이를 이용한 지게차용 안전주행방법 | |
| JP2020121672A (ja) | 自動停車制御システム | |
| JP7563247B2 (ja) | クレーン走行支援装置 | |
| JP2004142546A (ja) | 車両の運行管理装置 | |
| WO2020203130A1 (ja) | 車両制御装置、車両、及び車両制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A625 | Written request for application examination (by other person) |
Free format text: JAPANESE INTERMEDIATE CODE: A625 Effective date: 20230612 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20231219 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240216 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240430 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240701 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20241119 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20250117 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20250212 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250226 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7642401 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |