JP7645384B2 - 手持ち式装置 - Google Patents
手持ち式装置 Download PDFInfo
- Publication number
- JP7645384B2 JP7645384B2 JP2023538383A JP2023538383A JP7645384B2 JP 7645384 B2 JP7645384 B2 JP 7645384B2 JP 2023538383 A JP2023538383 A JP 2023538383A JP 2023538383 A JP2023538383 A JP 2023538383A JP 7645384 B2 JP7645384 B2 JP 7645384B2
- Authority
- JP
- Japan
- Prior art keywords
- operator
- grip
- handheld device
- hand
- tablet
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


























































Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04M—TELEPHONIC COMMUNICATION
- H04M1/00—Substation equipment, e.g. for use by subscribers
- H04M1/02—Constructional features of telephone sets
- H04M1/11—Supports for sets, e.g. incorporating armrests
-
- A—HUMAN NECESSITIES
- A45—HAND OR TRAVELLING ARTICLES
- A45F—TRAVELLING OR CAMP EQUIPMENT: SACKS OR PACKS CARRIED ON THE BODY
- A45F5/00—Holders or carriers for hand articles; Holders or carriers for use while travelling or camping
- A45F5/10—Handles for carrying purposes
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04M—TELEPHONIC COMMUNICATION
- H04M1/00—Substation equipment, e.g. for use by subscribers
- H04M1/02—Constructional features of telephone sets
- H04M1/0202—Portable telephone sets, e.g. cordless phones, mobile phones or bar type handsets
- H04M1/0279—Improving the user comfort or ergonomics
- H04M1/0281—Improving the user comfort or ergonomics for providing single handed use or left/right hand conversion
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04M—TELEPHONIC COMMUNICATION
- H04M1/00—Substation equipment, e.g. for use by subscribers
- H04M1/02—Constructional features of telephone sets
- H04M1/04—Supports for telephone transmitters or receivers
-
- A—HUMAN NECESSITIES
- A45—HAND OR TRAVELLING ARTICLES
- A45F—TRAVELLING OR CAMP EQUIPMENT: SACKS OR PACKS CARRIED ON THE BODY
- A45F5/00—Holders or carriers for hand articles; Holders or carriers for use while travelling or camping
- A45F5/10—Handles for carrying purposes
- A45F2005/1006—Handles for carrying purposes with means embracing the hand article to be carried
-
- A—HUMAN NECESSITIES
- A45—HAND OR TRAVELLING ARTICLES
- A45F—TRAVELLING OR CAMP EQUIPMENT: SACKS OR PACKS CARRIED ON THE BODY
- A45F5/00—Holders or carriers for hand articles; Holders or carriers for use while travelling or camping
- A45F5/1516—Holders or carriers for portable handheld communication devices, e.g. pagers or smart phones
Landscapes
- Engineering & Computer Science (AREA)
- Signal Processing (AREA)
- Casings For Electric Apparatus (AREA)
- Manipulator (AREA)
- Position Input By Displaying (AREA)
Description
各実施例では、本発明の携帯端末(つまりモバイル操作可能な端末)として、タブレットを例にとり、手持ち式装置をタブレットホルダーと呼称するが、本発明の携帯端末は、タブレットのみならず、タブレットPC(パソコン)、タブレット端末、スマートフォン、スマートデバイス、モバイル端末、モバイル機器、小型ノートパソコン等を含む。
図1ないし図24は、本発明の第1の実施例によるタブレットホルダーを説明するための図である。これらの図において、図1ないし図8、図17、図18、図24はタブレットホルダー単体の外観図、図9ないし図16はタブレットホルダーにタブレットが保持された状態の外観図、図19ないし図23はタブレットホルダーの使用状態を説明するための図である。
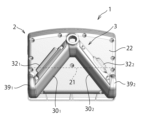
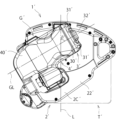
把持部3は、図3ないし図5に示すように、長手方向(図3左右方向)に延びる把持本体部30を備えている。把持本体部30の長手方向の中心線30C(すなわち、把持本体部30の配設方向)は、ホルダー本体2の表側の当接部21と平行になっている。把持本体部30は、操作者の手指の第2指から第5指により把持される部位であって、側面視略凸円弧状(または円形状)の外周面30aを有している。把持本体部30の左右両側に配置された各側部31、31’は、把持本体部30よりも上方(図3上方)に突出しており、操作者の手指の第1指が嵌まり込む嵌合凹部31a、31’aをそれぞれ有している。嵌合凹部31aは操作者の左手の第1指に対応しており、嵌合凹部31’aは操作者の右手の第1指に対応している。
α=40±10°、β=40±10°
すなわち、
30°<α<50°、30°<β<50°
よって、
60°<α+β<100°
に設定されている。
これは、操作者の身長や腕の長さ、性別の違い等の個体差を考慮したものである。
ここでは、好ましい例として、
α=β=40°(またはα≒β≒40°)
に設定されている。
上述したタブレットホルダー1の使用の際には、図1、図9ないし図11に示すように、まず、ホルダー本体2のベース面20にタブレットTを載置して、当接部21および各保持具10、11によりタブレットTをホルダー本体2で保持する。この状態から、操作者がタブレットTを横向きにし、左手で把持部3を把持して右手でタブレットTを操作する際には、図17に示すように、タブレットホルダー2の裏面側から見て、把持部3を含むグリップユニットGを中心Oの反時計回りに角度αだけ回動させる。
前記第1の実施例では、把持部3が回動可能に構成された例を示したが、本発明の適用はこれに限定されない。図25ないし図40は、本発明の第2の実施例によるタブレットホルダーを説明するための図である。これらの図において、前記第1の実施例と同一符号は同一または相当部分を示している。図25ないし図32はタブレットホルダー単体の外観図、図33ないし図40はタブレットホルダーにタブレットが保持された状態の外観図である。
図41ないし図52は、本発明の第3の実施例によるタブレットホルダーを示している。これらの図において、前記第1の実施例と同一符号は同一または相当部分を示している。図41ないし図46はタブレットホルダー単体を示しており、図47ないし図52はタブレットホルダーにタブレットが保持された状態を示している。
図53ないし図60は、本発明の第4の実施例によるタブレットホルダーを説明するための図であって、図53、図54、図57~図60はタブレットホルダー単体の外観図、図55および図56はタブレットホルダーにタブレット(一点鎖線で図示)が保持された状態の背面図(裏面図)である。これらの図において、前記第1の実施例と同一符号は同一または相当部分を示している。
α’=β’=60° または α’≒β’≒60°
に設定されている。つまり、角度α’、β’は60度または実質的に(あるいは概略)60度に設定されている。
これは、上述した10~13インチ程度の比較的大型サイズのタブレットについては、タブレットの短辺(短手方向の辺)と対角線のなす角度が約60度になっているからであり、これに合わせたものである。
上述したタブレットホルダー1’の使用の際には、ホルダー本体2’のベース面20’(図53)にタブレットT’を横向きに載置(つまり各短辺を左右に配置)して、当接部21’および各保持具221、221’によりタブレットT’をホルダー本体2’で保持する。この状態から、操作者が左手で把持部3’を把持して右手でタブレットTを操作する際には、図55に示すように、タブレットホルダー2’の裏側から見て、把持部3’を含むグリップユニットG’をホルダー本体2’ の前後方向の中心線Lに対して反時計回りに角度α’(=60°または≒60°)だけ回動させる。
上述した各実施例はあらゆる点で本発明の単なる例示としてのみみなされるべきものであって、限定的なものではない。本発明が関連する分野の当業者は、本明細書中に明示の記載はなくても、上述の教示内容を考慮するとき、本発明の精神および本質的な特徴部分から外れることなく、本発明の原理を採用する種々の変形例やさらなるその他の実施例を構築し得る。
2、2’: ホルダー本体(装置本体)
20、20’: ベース面
21、21’: 当接部
22、22’: 裏面(支持部)
3、3’: 把持部
30、30’: 把持本体部
31、31’: 側部
31a、31’a: 嵌合凹部
4、4’: 支持部
23、23’: 非常停止スイッチ(停止スイッチ/操作入力部)
24: ジョイスティック(操作入力部)
25: その他のスイッチ(操作入力部)
G、G’: グリップユニット
O: 中心
T、T’: タブレット(携帯端末)
T1、T2: 側面
α、α’、β、β’: 回動角
P: 操作者
Fa: 前腕
f1: 第1指
f2~f5: 第2~第5指
Wr: 手首
Claims (8)
- ロボットを含む機械に対して信号を出力するための携帯端末を着脱可能に保持する手持ち式装置であって、
前記携帯端末が載置されるベース面を表側に有する装置本体と、
前記装置本体の裏側に配置され、少なくとも2つの向きを採り得るように設けられるとともに、操作者の手で把持されるように長手方向に延びる把持部と、
前記把持部に設けられ、当該把持部を把持した手で操作可能なイネーブルスイッチと、
前記把持部と一体に設けられかつ前記把持部の前記長手方向と直交する方向に延びるとともに、前記把持部を手で把持した操作者の前腕の少なくとも一部に当接することで下方から支持される当接面を有する支持部と、
を備えた手持ち式装置。 - 請求項1において、
前記装置本体の表側には、前記携帯端末の側面が当接し得る当接部が設けられており、前記把持部が、前記当接部の配設方向と平行に配置される中立位置を挟んで左右に所定角度回動可能に設けられるとともに、互いに斜めに交差する第1および第2の向きを採り得るようになっている、
ことを特徴とする手持ち式装置。 - 請求項2において、
前記把持部および前記支持部が、前記装置本体の中心位置またはその近傍位置の回りを回動可能になっている、
ことを特徴とする手持ち式装置。 - 請求項1において、
前記把持部が、操作者の手指の第2指から第5指により把持されるように前記長手方向に延びる把持本体部と、前記把持本体部の側部に形成され、操作者の手指の第1指が嵌まり込む嵌合凹部とを有している、
ことを特徴とする手持ち式装置。 - 請求項1において、
前記支持部の前記当接面が操作者の少なくとも手首に当接するように設けられている、
ことを特徴とする手持ち式装置。 - 請求項1において、
前記装置本体が、操作者による入力操作を受け付ける操作入力部を有している、
ことを特徴とする手持ち式装置。 - ロボットを含む機械に対して信号を出力するための携帯端末を着脱可能に保持する手持ち式装置であって、
前記携帯端末が載置されるベース面を表側に有する装置本体と、
前記装置本体の裏側に配置され、少なくとも2つの向きを採り得るように設けられるとともに、操作者の手で把持されるように長手方向に延びる把持部と、
前記把持部と一体に設けられかつ前記把持部の前記長手方向と直交する方向に延びるとともに、前記把持部を手で把持した操作者の前腕の少なくとも一部に当接することで下方から支持される当接面を有する支持部と、
前記装置本体の表側において前記把持部と上下に対向する位置に設けられ、前記機械に対して停止信号を出力するための停止スイッチと、
を備えた手持ち式装置。 - 請求項7において、
前記停止スイッチは、操作者が前記把持部を手で把持した際に手の中手指節関節と上下に対向する位置に配置されている、
ことを特徴とする手持ち式装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021121147 | 2021-07-25 | ||
| JP2021121147 | 2021-07-25 | ||
| PCT/JP2022/026921 WO2023008126A1 (ja) | 2021-07-25 | 2022-07-07 | 手持ち式装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2023008126A1 JPWO2023008126A1 (ja) | 2023-02-02 |
| JP7645384B2 true JP7645384B2 (ja) | 2025-03-13 |
Family
ID=85086704
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023538383A Active JP7645384B2 (ja) | 2021-07-25 | 2022-07-07 | 手持ち式装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20240225252A1 (ja) |
| EP (1) | EP4378640A4 (ja) |
| JP (1) | JP7645384B2 (ja) |
| CN (1) | CN117597910A (ja) |
| TW (1) | TW202304673A (ja) |
| WO (1) | WO2023008126A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2025097328A1 (en) * | 2023-11-08 | 2025-05-15 | Abb Schweiz Ag | Holding unit for safety control device for robot and associated handheld robotic control device |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20120091312A1 (en) | 2010-10-14 | 2012-04-19 | One Hand Clapping Ltd. | One-handed, back-based support for a hand-held object |
| JP2018014612A (ja) | 2016-07-21 | 2018-01-25 | 秀樹 芹澤 | 携帯情報端末保持具 |
| JP2020036181A (ja) | 2018-08-30 | 2020-03-05 | 村田機械株式会社 | 無線通信確立方法 |
| JP2021048922A (ja) | 2019-09-20 | 2021-04-01 | 株式会社Msソリューションズ | 保持具 |
| JP2021079540A (ja) | 2019-11-19 | 2021-05-27 | Idec株式会社 | 手持ち式装置およびホルダー |
| JP2021079539A (ja) | 2019-11-19 | 2021-05-27 | Idec株式会社 | 手持ち式装置およびホルダー |
| CN113827016A (zh) | 2021-10-12 | 2021-12-24 | 深圳市太惠科技有限公司 | 一种保护套 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2672487B2 (ja) * | 1995-09-21 | 1997-11-05 | 川崎重工業株式会社 | 抱え込み型ロボット用教示装置 |
| US6696986B1 (en) * | 1998-03-16 | 2004-02-24 | Shelton E. Harrison, Jr. | Key palette improvements |
| US6726070B2 (en) * | 2002-05-20 | 2004-04-27 | Robert Lautner | Ergonomic input-device holder |
| US20040226973A1 (en) * | 2003-05-14 | 2004-11-18 | Adomax Technology Co., Ltd. | One-hand-holding aid for tablet personal computer |
| US20120068043A1 (en) * | 2010-07-20 | 2012-03-22 | Dc Mobile Design, Llc | Personal electronic device holder systems |
| US8941989B2 (en) * | 2010-09-29 | 2015-01-27 | James W. Pollex | Tablet computer holder and stand |
| US20120327593A1 (en) * | 2011-06-27 | 2012-12-27 | Finnegan Sean W | Tablet computer holding device |
| US8939482B2 (en) * | 2012-09-19 | 2015-01-27 | Kara M. Rasmussen | Support system for digital tablet devices |
| US9388939B2 (en) * | 2012-10-03 | 2016-07-12 | Dimitri Girault | Multi-media tablet holder comprising a pivotable and rotatable ratchet mount, a lighting device and a handle including a user input touch screen |
| DE102015206571B3 (de) * | 2015-04-13 | 2016-08-04 | Kuka Roboter Gmbh | Roboter-Bedienhandgerät mit einer Adaptervorrichtung für ein mobiles Endgerät |
| US20160341517A1 (en) * | 2015-05-21 | 2016-11-24 | Intelboss LLC | System and method for producing a customized grip |
| JP7277294B2 (ja) | 2019-07-09 | 2023-05-18 | ファナック株式会社 | 機械を操作する携帯端末に取り付けられる安全スイッチ装置および安全スイッチ装置を備える機械の操作装置 |
-
2022
- 2022-07-04 TW TW111125024A patent/TW202304673A/zh unknown
- 2022-07-07 CN CN202280042596.4A patent/CN117597910A/zh active Pending
- 2022-07-07 US US18/291,308 patent/US20240225252A1/en not_active Abandoned
- 2022-07-07 EP EP22849191.6A patent/EP4378640A4/en active Pending
- 2022-07-07 JP JP2023538383A patent/JP7645384B2/ja active Active
- 2022-07-07 WO PCT/JP2022/026921 patent/WO2023008126A1/ja not_active Ceased
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20120091312A1 (en) | 2010-10-14 | 2012-04-19 | One Hand Clapping Ltd. | One-handed, back-based support for a hand-held object |
| JP2018014612A (ja) | 2016-07-21 | 2018-01-25 | 秀樹 芹澤 | 携帯情報端末保持具 |
| JP2020036181A (ja) | 2018-08-30 | 2020-03-05 | 村田機械株式会社 | 無線通信確立方法 |
| JP2021048922A (ja) | 2019-09-20 | 2021-04-01 | 株式会社Msソリューションズ | 保持具 |
| JP2021079540A (ja) | 2019-11-19 | 2021-05-27 | Idec株式会社 | 手持ち式装置およびホルダー |
| JP2021079539A (ja) | 2019-11-19 | 2021-05-27 | Idec株式会社 | 手持ち式装置およびホルダー |
| CN113827016A (zh) | 2021-10-12 | 2021-12-24 | 深圳市太惠科技有限公司 | 一种保护套 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP4378640A4 (en) | 2025-07-30 |
| JPWO2023008126A1 (ja) | 2023-02-02 |
| WO2023008126A1 (ja) | 2023-02-02 |
| CN117597910A (zh) | 2024-02-23 |
| TW202304673A (zh) | 2023-02-01 |
| US20240225252A1 (en) | 2024-07-11 |
| EP4378640A1 (en) | 2024-06-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10935183B2 (en) | Handle | |
| JP7583102B2 (ja) | 機械を操作する携帯端末に取り付けられる安全スイッチ装置および安全スイッチ装置を備える機械の操作装置 | |
| CN113795316A (zh) | 平衡式游戏控制器夹具 | |
| CN106217349A (zh) | 示教装置以及机器人系统 | |
| CA2578208C (en) | Computer input device | |
| JP7645384B2 (ja) | 手持ち式装置 | |
| JP2020063016A (ja) | ステアリングホイール | |
| JP2016221644A (ja) | 教示装置およびロボットシステム | |
| CN109841441A (zh) | 便携式操作装置 | |
| JP2672487B2 (ja) | 抱え込み型ロボット用教示装置 | |
| JPH0516993B2 (ja) | ||
| JP7381870B2 (ja) | マウス装置 | |
| JP5938870B2 (ja) | ロボット | |
| JP2008087105A (ja) | ロボットハンド | |
| US7671838B2 (en) | Biomechanically low load multi-angle multi-dexterity computer mouse | |
| US12318346B2 (en) | Controller, crutch and wearable robot including the same | |
| JPH05177979A (ja) | 筆記具用保持補助具 | |
| US20230000575A1 (en) | Medical robot | |
| KR200301821Y1 (ko) | 이송 손잡이를 구비한 타블렛 모니터 | |
| JP2023070922A (ja) | 手持ち式装置の保持機構 | |
| EP2439617B1 (en) | Mouse pad with accommodating structure | |
| JP3137791U (ja) | 筋骨格系疾患予防マウスボード | |
| JP2002307347A (ja) | 可搬式教示装置 | |
| WO2022230392A1 (ja) | 入力装置 | |
| JPH0323638Y2 (ja) |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20231201 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240819 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20241012 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20241216 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20241224 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20250218 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20250225 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250303 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7645384 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |