図1は、本実施の形態に係る打込工具を示す側面図である。
図2は、打込工具を側面から見た打込工具を示す断面図である。
図3は、コイルばねが伸長した状態のプランジャアセンブリを示す斜視図である。
図4は、コイルばねが収縮した状態のプランジャアセンブリを示す断面図である。
図5は、図1とは反対側から見た打込工具の内部構造を示す側面図である。
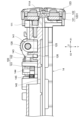
図6は、図5に示されたコンタクトアームを一部分解して示す斜視図である。
図7は、図5に示されたマガジンからコンタクトアーム等を取り外した状態を示す斜視図である。
図8は、下方から見たノーズ部を一部切り欠いて示す底面図である。
図9は、コンタクトアームがオフ状態の位置で待機中であり、コンタクトアームと係合部材とが係合している状態を示す側面図である。
図10は、コンタクトアームがオン状態の位置に移動し、コンタクトアームと係合部材とが係合した状態を示す側面図である。
図11は、コンタクトアームがオン状態の位置にあるものの、コンタクトアームと係合部材との係合が解除された状態を示す側面図である。
以下、本発明の実施形態について図面を用いて説明する。以下の実施形態は、本発明を説明するための例示であり、本発明をその実施形態のみに限定する趣旨ではない。
[打込工具の構成]
図1は、電動式の打込工具10の側面図(ただし、マガジン部については一部断面図を示している。)を示し、図2は、図1と同じ方向から見た打込工具10の断面図を示している(ただし、マガジン14内の全てのファスナFを打ち出した後の状態を示している)。この打込工具10は、モータ20(図2に示す)を用いてプランジャ32(図2に示す)を駆動することにより、釘(「ファスナF」の一例)を打ち込み可能に構成される電動釘打機である。
なお、本明細書の「上下」、「前後」、「左右」は、図1及び図2の打込工具10の姿勢に基づいている。図1及び図2における紙面左右方向を打込工具10の前後方向X(紙面左方向を打込工具10の前方向X1、紙面右方向を打込工具10の後方向X2)とし、図1及び図2における紙面の垂直方向を打込工具10の左右方向Yとし、図1及び図2における紙面上下方向を打込工具10の上下方向Zとする。図1及び図2における紙面下方向は、ファスナFが打ち出される方向に相当するため、打ち出し方向DR1又は射出方向DR1等と呼ばれる場合があり、反対の紙面上方向は、ファスナFが打ち出される射出口12Aから離れる方向であるため、離反方向DR2と呼ばれる場合がある。
打込工具10は、ハウジング12と、打込工具10によって打ち出されるファスナFを収容するマガジン14と、ファスナFを打ち出すためのドライバ34と、ドライバ34が取り付けられるプランジャ32と、プランジャ32を下死点から上死点に移動させるためのモータ20及びギア22と、プランジャ32を上死点から下死点に移動させるための駆動力を付与するコイルばね36と、コイルばね36の伸長する端部に配置される移動部材38と、プランジャ32及び移動部材38に係合し両者を連動させるワイヤ40と、ワイヤ40が掛けられるプーリ42と、を備えている。打込工具10には、バッテリBが着脱自在に更に設けられている。
打込工具10は、プランジャ32を含む打込工具10の主要部品を収納するハウジング12(以下、ハウジング12及びハウジング12に固定される部分を「工具本体」という場合がある。)を備えている。ハウジング12には、操作者が把持するためのグリップ部12BバッテリBが取り付けられたバッテリ取付部とモータ20とを繋ぐ架橋部12C、ファスナFを打ち出すためのノーズ部12D等が設けられている。グリップ部12B及び架橋部12Cは、操作者が把持しやすいように、例えば、前後方向Xに延在する柱状にそれぞれ形成されている。ハウジング12の前端(及び打込工具10の前端)には、ファスナFを下方向に打ち出すための射出口12Aが形成されたノーズ部12Dが設けられている。ノーズ部12Dの先端には、コンタクトアーム12D1が取り付けられていてもよい。コンタクトアーム12D1は、工具本体12に進退可能に設けられており、コンタクトアーム12D1が打ち込み対象物に押しつけられており、かつ、トリガ12Eが押下されている状態にのみ、ファスナFの打ち出しを許可する安全装置として機能する。前述した射出口12Aは、例えば、コンタクトアーム12D1の先端に形成されている。
ハウジング12には、トリガ12Eが設けられている。トリガ12Eは、使用者が押下することによりバッテリBとモータ20とを導通させる。トリガ12Eは、グリップ部12Bの下方(ファスナFの打ち出し方向DR1)を向いた表面に露出して設けられ、例えば、バネ等のトリガ付勢部材12Fによって下方に付勢されている。
バッテリBは、グリップ部12B及び架橋部12Cの後端部に着脱自在に取り付け可能に構成されている。バッテリBは、モータ等を駆動するための電力を供給する直流電源として機能し、所定(例えば、14V~20V)の直流電圧を出力可能な、例えば、リチウムイオン電池から構成される。打込工具10は、バッテリBを取り付けることにより携帯して使用することが可能となる。ただし、バッテリBをハウジング12内に収納するように構成してもよいし、バッテリ以外の手段により電力を供給するように構成してもよい。
打込工具10は、ノーズ部12Dの後方に取り付けられるマガジン14を備えている。マガジン14は、平行に並べられ、接着剤で互いに連結された複数のファスナF(図1に示す)が装填可能に構成されている。マガジン14は、ファスナFをノーズ部12Dに向かって付勢するプッシャ14Aを備えている。プッシャ14Aは、先頭のファスナFがドライバ34によって打ち出されると隣接するファスナFがノーズ部12Dの射出路に供給されるように不図示の付勢部材により付勢されている。
打込工具10は、プランジャアセンブリ30を更に備えている。図3は、コイルばね36が伸長した状態のプランジャアセンブリ30を示す斜視図であり、図4は、コイルばね36が収縮した状態のプランジャアセンブリを示す断面図である。
図4に示すようにプランジャアセンブリ30は、例えば、ドライバ34と、プランジャ32と、コイルばね36と、移動部材38と、ワイヤ40と、プーリ42と、コイルばね36を収容するシリンダ44と、プランジャ32の移動方向を規制する一対のガイドレール46と、を備えている。
ドライバ34は、ファスナFに接触してこれを打撃することによりファスナFを打ち出す部材である。ドライバ34は、例えば、ファスナFの打ち出し方向DR1に延在する細長い棒状に形成された金属製の剛体から構成されている。ドライバ34の延長線上には、ファスナFが配置されているため、ドライバ34が打ち出し方向DR1に移動すると、ドライバ34の前端がファスナFを打撃する。ドライバ34の後端はプランジャ32に連結され、プランジャ32と一体的に移動するように構成されている。
プランジャ32は、上死点から下死点に移動することによりドライバ34と一体的に移動してファスナFを打ち出すための部材である。プランジャ32は、4つの側壁部を備えており、ワイヤ40が係合する第1側壁部32Aと、第1側壁部32Aに略直角に接続し、一方のガイドレール46に係合する第2側壁部32Bと、第2側壁部32Bに略直角に接続し第1側壁部32Aと略平行に設けられ、ドライバ34が係合する第3側壁部32Cと、第3側壁部32C及び第1側壁部32Aにそれぞれ略直角に接続し第2側壁部32Bと略平行に設けられ、他方のガイドレール46に係合する第4側壁部32とを備えている。4つの側壁部で囲まれた中空の領域には、後述するシリンダ44が配置される。
第1側壁部32Aの外壁面には、異なる高さに設けられた2つの凸部であるギア係合部32A1が設けられている。プランジャ32は、このギア係合部32A1と後述するギア22(図2に示す)とが係合することにより、コイルばね36の弾性力(付勢力)に抗して下死点から上死点に向かって移動するように構成されている。このプランジャ32の上死点は、工具本体12の上端側の領域に設定され、下死点は、上死点とノーズ部12Dとの間の領域に設定される。このため、プランジャ32が上死点から下死点に移動するときに、プランジャ32は、射出口12Aに接近する打ち出し方向DR1に移動し、プランジャ32が下死点から上死点に移動するときに、プランジャ32は、射出から離反する離反方向DR2に移動する。
プランジャ32の第1側壁部32Aには、ワイヤ係合部32A2が更に設けられる。ワイヤ係合部32A2は、フック状に形成されている。ワイヤ係合部32A2は、第1側壁部32Aの内壁面から内側に向かう方向(すなわち、第3側壁部32Cに接近する方向)に突出して形成される第1部分と、第1部分の端部から上死点に接近する方向に延在する第2部分と、を備えている。
ワイヤ係合部32A2の第1部分の上死点を向いた面は、ワイヤ40からプランジャ32に打ち出し方向DR1の力を作用させるための受圧面となる。また、ワイヤ係合部32A2の第2部分は、ワイヤ40が第3側壁部32Cに接近する方向にずれることを規制する。さらに、第1部分を第3側壁部32Cに接近する方向に突出して形成したことにより、第1部分の受圧面に係合するワイヤ40を第1側壁部32Aの内壁面に沿って延在させることが可能となる。このため、ワイヤ40が第3側壁部32Cから離間する方向にずれることを抑制することも可能となる。加えてワイヤ係合部32A2は、第2側壁部32B及び第4側壁部32Dを近似する平面に平行に形成されている。このような構成により、ワイヤ40からプランジャ32に作用する力のバランスが崩れてプランジャ32が傾くことを抑制できる。
図3に示すようにシリンダ44は、コイルばね36を収容し、移動部材38の一部をなすピン38Aの移動方向をガイドする部材である。本実施形態に係るシリンダ44は、円筒状に形成される円筒部44Aと、円筒部44Aの蓋に相当するキャップ部44Cと、を備えている。シリンダ44は、プランジャ32の4つの側壁部で囲まれた中空の領域を貫通し、プランジャ32の移動方向とシリンダ44の中心軸Cとが略平行となるようにハウジング12(プランジャアセンブリ30の基部30A)に固定されている。
図4に示すようにシリンダ44の内部には、シリンダ44の中心軸Cの方向(中心軸方向、又は伸縮方向ともいう。)A、すなわち、プランジャ32の移動方向に伸縮可能な圧縮ばねからなるコイルばね36が収容されている。コイルばね36の一端36Aは、射出口側(プランジャ32の下死点側)のシリンダ底面に固定される。コイルばね36の他端36B上には移動部材38が配置され、移動部材38は、ワイヤ40により一端36A側(下側)に張力がかけられている。このためコイルばねの他端36B及び移動部材38はいずれも移動可能に構成され、コイルばね36が伸長状態から圧縮するときに、コイルばね36の他端36B及び移動部材38は打ち出し方向DR1に移動し、コイルばね36が圧縮状態から伸長して復元するときに、コイルばねの他端36B及び移動部材38は射出口12Aから離反する離反方向DR2に移動する。図3に示すようにシリンダ44の壁部には、中心軸Cに平行に、すなわち、コイルばね36の伸縮方向Aに平行に延在する一対の孔44Bが形成される。
図4に示すように移動部材38は、ワイヤ40の一部分と直接的又は間接的に係合することにより、コイルばね36の伸縮(他端36Bの移動)とともにワイヤ40を移動させる。本実施形態に係る移動部材38は、コイルばねの他端36Bに配置される円筒部38Bと、円筒部38Bに固定され、ワイヤ40の両端部が係合されるピン38Aと、を備えている。
図4に示すようにワイヤ40は、移動部材38及びプランジャ32に取り付けられることにより移動部材38とプランジャ32を連動させる部材である。本実施形態においてワイヤ40は、一端が輪状に形成され、この輪状に形成された部分にピン38Aを挿通することにより、ピン38Aと係合する。ピン38Aに係合するワイヤ40は、移動部材38の円筒部38Bの軸孔を通過してコイルばね36の中心軸Cに沿って打ち出し方向DR1に延在し、シリンダ44の底面に形成された孔を通過した後プーリ42に掛け回されることによって方向転換し、離反方向DR2に延在し、プランジャ32のワイヤ係合部32A2の受圧面に係合する。続いてワイヤ40は、打ち出し方向DR1に延在し、プーリ42に掛け回されることによって方向転換し、コイルばね36の中心軸に沿って離反方向DR2に延在する。ワイヤ40は、他端が輪状に形成され、この輪状に形成された部分にピン38Aを挿通することにより、ピン38Aと係合する。したがって、ワイヤ40の両端はいずれもピン38Aに係合し、ワイヤ40の中間部分はプランジャ32に係合する。
すなわちワイヤ40は、移動部材38に係合する一端部を含む第1部分40Aと、第1部分40Aに接続し打ち出し方向DR1に延在する部分を含む第2部分40Bと、第2部分40Bに接続し略離反方向DR2に延在する部分を含む第3部分40Cと、第3部分40Cに接続しプランジャ32に係合する第4部分40Dと、第4部分40Dに接続し略打ち出し方向DR1に延在する部分を含む第5部分40Eと、第5部分40Eに接続し離反方向DR2に延在する部分を含む第6部分40Fと、第6部分40Fに接続し移動部材38に係合する他端部を含む第7部分40Gと、を備えている。
図2に示すようにプランジャ32を下死点から上死点に移動させるための駆動機構は、モータ20及びギア22から構成される。本実施形態に係るモータ20は、三相DCブラシレスモータから構成されており、例えば、架橋部12C内に、モータ20の出力軸が打ち出し方向DR1及び離反方向DR2と略垂直となるように配置されている。モータ20の出力軸を回転軸とするギアとギア22を構成する第1ギア22Aは噛合し、第1ギア22Aはギア22を構成する第2ギア22Bと噛合する。モータ20の出力軸のギアに対して第1ギア22Aは離反方向DR2に配置され、第1ギア22Aに対して第2ギア22Bは離反方向DR2に配置される。第1ギア22A及び第2ギア22Bには、それぞれ、回転軸に平行で、プランジャ32の第1側壁部32Aの外壁面に接近する方向に突出するトルクローラ(不図示)が設けられる。トルクローラは、第1ギア22A(第2ギア22B)の回転に伴って第1ギア22A(第2ギア22B)の中心軸を中心に回転する。第1ギア22A(第2ギア22B)の中心軸は、モータ20の出力軸と平行であるから、第1ギア22A(第2ギア22B)の回転に伴ってトルクローラは、打ち出し方向DR1及び離反方向DR2に往復運動する。プランジャ32が下死点付近に存在するとき、ギア係合部32A1として下死点側に設けられた一方の凸部には、第1ギア22Aのトルクローラが係合する。そして第1ギア22Aの回転に伴いトルクローラは離反方向DR2に移動するため、プランジャ32のギア係合部32A1を離反方向DR2に押し上げるから、プランジャ32を離反方向DR2に移動させることが可能となる。第1ギア22Aのトルクローラが最も離反方向DR2に移動するとき、ギア係合部32A1として上死点側に設けられた他方の凸部には、第2ギア22Bのトルクローラが係合する。そして第2ギア22Bの回転に伴いトルクローラは離反方向DR2に移動するため、プランジャ32のギア係合部32A1を離反方向DR2に更に押し上げるから、プランジャ32を離反方向DR2に更に移動させることが可能となる。第2ギア22Bのトルクローラが最も離反方向DR2に移動するときに、プランジャ32は上死点に到達し、ギア係合部32A1と第2ギア22Bとの係合が解除されるように構成されている。
なお、モータによって駆動されるギア等を用いてプランジャを移動させ、上死点において、ギア等とプランジャの係合を解除させてプランジャを下死点に向かって移動させる手段は、様々な技術を使用することが可能である。
打込工具10は、モータ20を駆動するための制御部(不図示)を更に備えている。制御部は、架橋部12C内のモータ20とバッテリBとの間隙に配置されるPCB基板24(図2に示す)に搭載されている。制御部は、モータ20の制御プログラム等、本実施形態に記載される演算処理等を実行するためのコンピュータプログラムを格納する不揮発性の半導体メモリ(例えば、フラッシュメモリ)と、演算処理結果等のデータを一時的に格納する揮発性の半導体メモリ(SRAM及びDRAM)と、半導体メモリから読み出されたコンピュータプログラムを実行し制御命令(インバータ回路のベース(又はゲート)に供給されるPWM信号)を生成するマイクロコントローラと、制御命令に基づいて駆動信号を生成するドライバ回路等を備えている。ドライバ回路は、バッテリBの出力端子である正極端子及び負極端子に接続される直流母線間に設けられた三相ブリッジ接続されたインバータ回路から構成される。ドライバ回路の出力端子は、モータ20のステータを構成する三相巻線に接続される。
[打込方法]
以下、上述した打込工具10を用いた打込方法について説明する。初期状態においてプランジャ32は、上死点と下死点の中間の待機位置に待機している。このような状態において操作者がグリップ部12Bを把持し、射出口12Aが形成されたコンタクトアーム12D1の先端を打込部材に押し付けてからトリガ12Eを押下すると、バッテリBとモータ20が導通し、モータ20のロータは回転を開始する。
モータ20のロータが回転を開始すると、モータ20の出力軸に直結されるギアに噛合する第1ギア22Aと、その第1ギア22Aに噛合する第2ギア22Bは回転を開始する。第2ギア22Bに設けられるトルクローラは、プランジャ32のギア係合部32A1に接触してプランジャ32を離反方向DR2に押し上げる。プランジャ32はワイヤ40によって移動部材38に接続されているため、プランジャ32が離反方向DR2に移動することに連動して、移動部材38はコイルばね36を圧縮させながら打ち出し方向DR1に移動する。プランジャ32が上死点に近づくほどコイルばね36が圧縮するため、コイルばね36の付勢力は大きくなる。
プランジャ32が上死点に到達すると、プランジャ32とギア(トルクローラ)22との係合は解除される。このため、圧縮状態にあるコイルばね36は、一気に伸長する。移動部材38はコイルばね36の他端36Bとともに、コイルばね36の伸長方向である離反方向DR2に移動する。移動部材38はワイヤ40によってプランジャ32に接続されているため、移動部材38が離反方向DR2に移動することに連動してプランジャ32及びドライバ34は打ち出し方向DR1に移動する。プランジャ32が下死点付近に向けて下降するときに、プランジャ32とともに打ち出し方向DR1に移動するドライバ34は、ノーズ部12Dに供給されるファスナFを打ち出し方向DR1に打ち出す。ファスナFは、射出口12Aから打ち出される。
次に、下死点付近に存在するプランジャ32を待機位置に移動させるためにモータ20のロータが回転を開始する。第1ギア22Aに設けられるトルクローラは、プランジャ32のギア係合部32A1に接触してプランジャ32を離反方向DR2に押し上げる。使用者の安全を確保するために、プランジャ32が待機位置に到達したとき、モータ20のロータが回転を停止して連続動作しないようになっているため、1サイクル毎にロータが停止する。トリガ12Eを一度戻して、再度押下すると、モータ20のロータが再度回転して上述の動作を繰り返し、ファスナFを繰り返し打ち出す。
[空打ち防止機構]
本実施形態の打込工具10は、マガジン14内のファスナFが無くなったときにドライバ34(プランジャ32)を作動させない空打ち防止機構を備えている。本実施形態に係る空打ち防止機構は、コンタクトアーム12D1の移動を規制して空打ちを防止するのではなく、コンタクトスイッチ124を押圧する係合部材100とコンタクトアーム12D1との係合を解除することで、これまで説明した打込方法によるファスナFの打ち込み動作を行わないようにして空打ちを防止することが特徴の一つである。以下、空打ち防止機構の一例について説明する。
図5は、右半分のハウジング12を取り外して打込工具10の内部構造を示す側面図であり、図1に示された内壁側とは反対側の外壁側から見たマガジン14を示している。コンタクトアーム12D1が図5に示されたオン状態の位置P2にあるとき、トリガ12Eを引くとドライバ34が作動してファスナFが打ち出される一方、コンタクトアーム12D1が図1及び図2に示されたオフ状態の位置P1にあるとき、トリガ12Eを引いてもドライバ34が作動しない。
図5に示すように、マガジン14の外壁側には、コンタクトアーム12D1の位置P1,P2を検知するコンタクトスイッチ124と、コンタクトスイッチ124を押圧する各種部品とで構成された空打ち防止機構が配置されている。コンタクトスイッチ124は、回路上でトリガ12Eの位置を検知するトリガスイッチとAND回路を構成する。コンタクトスイッチ124とトリガスイッチとが同時にオン状態にならないとファスナFの打ち込み動作を行わない。
ノーズ部12Dは、前述したコンタクトアーム12D1に加えて、マガジン14の前端に固定された平板状のベースプレート111と、ベースプレート111に固定され、ベースプレート111との間にコンタクトアーム12D1を挟むように配置されたカバープレート112と、を更に備えている。
図6は、図5に示されたコンタクトアーム12D1を一部分解して示す斜視図である。図6に示すように、コンタクトアーム12D1は、ノーズプレート121と、ガイドプレート122と、アーム123と、を備えている。ノーズプレート121は、マガジン14に固定されたベースプレート111のガイドレール111A(図7及び図8に示す)に沿って上下に摺動する。
ノーズプレート121の先端が被打込材に当接して押圧されるとコンタクトアーム12D1がオン状態の位置P2に移動する。ガイドプレート122は、ノーズプレート121の先端寄りに固定されている。ノーズプレート121とガイドプレート122との間には、ファスナFを案内する溝が形成されている。
アーム123は、ノーズプレート121から後方へ延在している。図6に示すように、アーム123は、軸部125、接触部126、コイルばね127、調整ダイヤル128等の部品で構成されている。軸部125は、アーム123の先端及びその近傍の部分を含む先端部を上下に貫通する略棒状に形成され、アーム123に螺合するおねじが形成されたねじ部1251と、調整ダイヤル128の有底穴に挿入される先端部1252と、を有している。先端部1252は、コイルばね127を収容可能な筒状に形成されている。コイルばね127は、アーム123を下方へ、すなわちオン状態の位置P2からオフ状態の位置P1への向きに付勢している。
先端部1252の外周面には、調整ダイヤル128に対して、軸部125の軸方向である図6中のZ軸方向には摺動可能であり、Z軸まわりの周方向には回転できない回り止め加工が施されている。図示した例では、先端部1252の外周面において、180°対向する一対の平坦面が形成されている(両面Dカット加工)。回り止め加工は図示した例に限定されず、片面のみのDカット加工であってもよいし、キー溝加工であってもよい。公知の構造を適宜選択できる。調整ダイヤル128の有底穴は、先端部1252の外周面に倣うように形成されている。
調整ダイヤル128は、ハウジング12に形成された開口部からハウジング12外に露出している。使用者が操作して調整ダイヤル128をZ軸まわりに回転させると、回り止め加工が施された軸部125が調整ダイヤル128に従動する。軸部125が回転すると、ねじ部(送りねじ)1251に螺合するアーム123がねじ部1251に対して上下に移動する。これにより、ファスナFの打込み深さを調整することができる。
従来機では、軸部125に相当する部材と打込み深さを調整する調整ダイヤルとが一体構造であったため、コンタクトアーム12D1がオフ状態の位置P1とオン状態の位置P2との間で上下動するたびに調整ダイヤルも上下動していた。そのため、ハウジング12に相当する部材に調整ダイヤルを露出させる大きな開口部を形成しなければならなかった。開口部が大きくなるほど粉塵等がハウジング内に侵入しやすくなる。
これに対し、本実施形態であれば、調整ダイヤル128と軸部125とがDカットで摺動して固定されていないため、ハウジング12に形成する開口部を最小にできる。ハウジング12が粉塵等の侵入を抑制する効果が向上する。また、調整ダイヤル128の位置が上下動しないので、従来よりも高い位置に調整ダイヤル128を配置することができる。工具本体12の下部(先端部)をスリムにできるため、狭い場所で作業しやすくなる。調整ダイヤル128が射出口12Aから離れた位置にあるため、調整ダイヤル128をより安全に操作できる。
図7は、図5に示されたマガジン14からコンタクトアーム12D1、カバープレート112等を取り外した状態を示す斜視図である。図7に示すように、マガジン14の外壁を構成する外壁部材140の前端には、ベースプレート111が固定されている。ベースプレート111には、コンタクトアーム12D1をオン状態の位置P2からオフ状態の位置P1へ向かって付勢するばね111Bが付設されている。
マガジン14は、前述したプッシャ14Aに加えて、外壁部材140を更に備えている。マガジン14の外壁部材140には、アーム123の軸部125の下端部を支持する軸受141と、軸部125の上端部を支持する軸受142と、接触部126を案内するガイド143と、係合部材100を支持する支持部144と、が設けられている。
図8は、下方から見たノーズ部12Dを一部切り欠いて示す底面図である。図8に示すように、外壁部材140は、単一の板材で形成されている。可動部品を支持する図7に示された軸受141,142、ガイド143、支持部144のすべてが同一の外壁部材140に設けられているため、複数の部材の公差が集積せず、可動部品の位置精度を担保できる。
再び図7を参照して説明する。図示した例では、ガイド143が、接続部123を前後から挟み、上下に平行に延在する一対の凸条として構成されている。接触部(スライダ)126は、例えば金属材料から形成され、ガイド143に沿って上下に摺動する。マガジン14の外壁には、コンタクトアーム12D1に係合可能な係合部材100が設けられている。コンタクトアーム12D1がオン状態の位置P2にあり、かつ接触部126と係合部材100とが係合しているとき、係合部材100は、コンタクトスイッチ124を押圧する。
係合部材100は、支持部144に回転可能に支持されている。図示した例では、支持部144が、係合部材100に設けられた軸受に挿通される軸部として構成されている。る。支持部144は、係合部材100から突出した軸部が挿入される軸受であってもよい。図示した例では、係合部材100が、支持部144に回転可能に支持された第1部材101と、第1部材101に回転可能に支持された第2部材102と、を含んでいる。第1部材101は、マガジン14の外壁に付設されたコイルばね145により接触部126に向かって付勢されている。
マガジン内のファスナFの残量が所定数以下になるとプッシャ14Aは空位置まで前進する。プッシャ14Aが空位置に到達するまでは、コイルばね(付勢部材の一例)145に付勢された係合部材100とコンタクトアーム12D1の接触部126とが係合している。図9は、コンタクトアーム12D1がオフ状態の位置P1で待機中であり、コンタクトアーム12D1の接触部126と係合部材100とが係合している状態を示す側面図である。オフ状態の位置P1では、係合部材100は、コンタクトスイッチ124を押圧しない。
図10は、コンタクトアーム12D1がオン状態の位置P2に移動し、コンタクトアーム12D1の接触部126と係合部材100とが係合した状態を示す側面図である。図10に示すように、コンタクトアーム12D1がオン状態の位置P2にあり、かつ接触部126と係合部材100とが係合しているとき、係合部材100の第2部材102の上面がコンタクトスイッチ124を押圧する。
この状態でトリガ12Eを引くと、ドライバ34が作動してファスナFが打ち出される。マガジン14の内壁側において、プッシャ14Aは、マガジン14に収容されているファスナFの残量に応じて前進する。プッシャ14Aが前進すると、マガジン14の外壁側において、プッシャ14Aの動きに連動するレバー14Bが係合部材100に近づいてくる。図示した例では、レバー14Bがプッシャ14Aと一体的に形成されている。つまり、レバー14Bはプッシャ14Aの一部を構成している。ただし、レバー14Bの構造は図示した例に限定されず、プッシャ14Aとレバー14Bとが別体で形成されていてもよい。
図11は、コンタクトアーム12D1がオン状態の位置P2にあるものの、コンタクトアーム12D1の接触部126と係合部材100との係合が解除された状態を示す側面図である。ファスナFの残量が所定数以下の空位置(例えば、図2に示された0本の位置)までプッシャ14Aが前進したとき、図11に示すように、レバー14Bが係合部材100の第1部材101の下端部を押圧する。
押圧された第1部材101は、コイルばね145の付勢力に抗して支持部144を中心に回動する。図示した例では、第1部材101が反時計まわりに回動する。レバー14Bが前進して第1部材101の下端部101Aを押圧すると、回転中心である支持部144を挟んで下端部101Aとは反対側の上端部101Bが、レバー14Bの先端とは逆向きに後退する。これにより、係合部材100の第2部材102は、接触部126との係合が解除されてコンタクトスイッチ124に接触しない位置に退避する。
第2部材102は、第1部材101の上端部101Bに設けられた軸部を支点に揺動可能に構成されている。接触部126と第2部材102との係合が解除されると、自由になった第2部材102は、コンタクトスイッチ124から離間する向きすなわち下方に揺動する。
以上のように構成された本実施形態の打込工具10によれば、コンタクトアーム12D1のオフ状態の位置P1からオン状態の位置P2への移動を規制して空打ちを防止するのではなく、コンタクトスイッチ124を押圧する係合部材100とコンタクトアーム12D1との係合を解除することにより、コンタクトアーム12D1がコンタクトスイッチ124を押圧できないようにして空打ちを防止する。
そのため、引き摺り打ちなど種々の使用態様に対応できる。トリガ12Eの移動を規制する構造と比べると打込工具10の内部構造においてレイアウトの制約が小さい。スイッチなどの電気部品の検出精度に左右されないため、精度よく確実に空打ちを防止できる。接触部126や係合部材100のような可動部品が同一の外壁部材140で支持されるため、複数の部材の公差が集積せず、可動部品の位置精度を担保できる。
係合部材100は、支持部144に支持された第1部材101と、該第1部材101に支持された第2部材102と、を含み、マガジン14に対する第1部材101の回動に加えて、第1部材101に対する第2部材102の揺動が係合部材100の動きに含まれるため、係合部材100がコンタクトスイッチ124から退避する向きへの移動量を大きくできる。ノーズ部12Dとは反対側に可動部品が移動するため、ノーズ部12Dのスペースを圧迫しない。
以上説明した実施形態は、本発明の理解を容易にするためのものであり、本発明を限定して解釈するためのものではない。実施形態が備える各要素並びにその配置、材料、条件、形状及びサイズ等は、例示したものに限定されるわけではなく適宜変更することができる。また、異なる実施形態で示した構成同士を部分的に置換し又は組み合わせることが可能である。