JP7670633B2 - 作業管理方法、作業管理システム、及び作業管理プログラム - Google Patents
作業管理方法、作業管理システム、及び作業管理プログラム Download PDFInfo
- Publication number
- JP7670633B2 JP7670633B2 JP2022002738A JP2022002738A JP7670633B2 JP 7670633 B2 JP7670633 B2 JP 7670633B2 JP 2022002738 A JP2022002738 A JP 2022002738A JP 2022002738 A JP2022002738 A JP 2022002738A JP 7670633 B2 JP7670633 B2 JP 7670633B2
- Authority
- JP
- Japan
- Prior art keywords
- work
- target
- area
- field
- fields
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000007726 management method Methods 0.000 title claims description 65
- 239000000284 extract Substances 0.000 claims description 5
- 238000012937 correction Methods 0.000 description 15
- 238000004364 calculation method Methods 0.000 description 14
- 238000004891 communication Methods 0.000 description 13
- 238000000034 method Methods 0.000 description 10
- 238000003306 harvesting Methods 0.000 description 9
- 238000012545 processing Methods 0.000 description 9
- 238000010586 diagram Methods 0.000 description 6
- 238000004590 computer program Methods 0.000 description 4
- 238000012986 modification Methods 0.000 description 4
- 230000004048 modification Effects 0.000 description 4
- 238000013500 data storage Methods 0.000 description 3
- 238000005507 spraying Methods 0.000 description 3
- 238000005516 engineering process Methods 0.000 description 2
- 239000003337 fertilizer Substances 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 239000000575 pesticide Substances 0.000 description 2
- 239000007921 spray Substances 0.000 description 2
- 240000007594 Oryza sativa Species 0.000 description 1
- 235000007164 Oryza sativa Nutrition 0.000 description 1
- 230000001413 cellular effect Effects 0.000 description 1
- 230000001771 impaired effect Effects 0.000 description 1
- 230000010365 information processing Effects 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 235000009566 rice Nutrition 0.000 description 1
- 239000002689 soil Substances 0.000 description 1
Images





Landscapes
- Management, Administration, Business Operations System, And Electronic Commerce (AREA)
Description
本発明の本実施の形態による作業管理システム1000を、図面を参照して説明する。本実施の形態において、図1に示すように、作業管理システム1000は、作業管理装置100と、端末200とを備える。作業管理装置100は、ネットワーク20、例えばインターネットを介して、端末200と、1つ以上の作業装置30と通信可能に接続されている。
図1に示す作業管理システム1000に含まれる作業管理装置100の構成を説明する。作業管理装置100は、入出力装置110と、演算装置120と、通信装置130と、記憶装置140とを備える。作業管理装置100は、例えば、コンピュータである。入出力装置110には、演算装置120が処理を実行するための情報が入力される。また、入出力装置110は、演算装置120が処理を実行した結果を出力する。入出力装置110は、様々な入力装置と出力装置とを含み、例えば、キーボード、マウス、マイク、ディスプレイ、スピーカー、タッチパネルなどを含む。入出力装置110は省略されてもよい。
作業管理装置100の演算装置120は、作業装置30から位置情報を受信すると、作業管理プログラム320を読み出し実行する。作業管理プログラム320を実行することで、演算装置120は、作業管理方法である図5に示す処理を実行する。
実施の形態において説明した構成は一例であり、機能を阻害しない範囲で構成を変更することができる。例えば、図5に示すステップS110において、非対象圃場決定部161は、所定の期間、例えば対象作業を行うべき作物の栽培期間に、1つ以上の作業装置30による作業が行われた領域を非対象圃場から除外してもよい。例えば、栽培期間に作業装置30の位置情報により表される位置を含む圃場は、非対象圃場から除外される。
20 :ネットワーク
30 :作業装置
100 :作業管理装置
110 :入出力装置
120 :演算装置
130 :通信装置
140 :記憶装置
150 :データ記憶部
160 :対象領域決定部
161 :非対象圃場決定部
162 :装置作業圃場決定部
170 :完了領域決定部
180 :進捗量決定部
200 :端末
210 :入出力装置
220 :演算装置
230 :通信装置
240 :記憶装置
250 :表示部
300 :圃場データ
310 :作業履歴データ
320 :作業管理プログラム
330 :表示プログラム
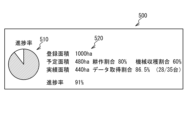
500 :進捗画像
510 :進捗グラフ
520 :補正量表示領域
550 :グラフ
600 :グラフ
1000 :作業管理システム
Claims (12)
- 複数の圃場で行われた作業を表す作業履歴データに基づき、前記複数の圃場の中から、1つ以上の作業装置を用いて対象作業が行われる予定の第1対象領域を抽出することと、
前記1つ以上の作業装置により前記対象作業が完了した第1完了領域と、前記第1対象領域とに基づき、前記第1対象領域における前記対象作業の進捗量を決定することと、
を含む作業管理方法。 - 前記第1対象領域を抽出することは、
前記作業履歴データに基づき、前記複数の圃場のうち、前記1つ以上の作業装置により前記対象作業が行われておらず、かつ、現時点において前記対象作業を行う予定の時期を経過していない圃場の領域を前記第1対象領域として抽出すること
を含む請求項1に記載の作業管理方法。 - 前記第1対象領域を抽出することは、
前記作業履歴データに基づき、前記複数の圃場のうち、前記1つ以上の作業装置により前記対象作業が行われておらず、かつ、現時点において前記対象作業を行う予定の時期を経過した圃場の領域を前記第1対象領域から除外すること
を含む請求項1または2に記載の作業管理方法。 - 前記第1対象領域を抽出することは、
前記作業履歴データに基づき、前記複数の圃場のうち、前記1つ以上の作業装置により前記対象作業が行われておらず、かつ、現時点において前記対象作業を行う予定の時期を経過した圃場の領域を前記第1対象領域として抽出すること
を含み、
前記対象作業の進捗量を決定することは、
前記作業履歴データに基づき、前記複数の圃場のうち、前記1つ以上の作業装置により前記対象作業が行われておらず、かつ、現時点において前記対象作業を行う予定の時期を経過した圃場の領域を前記第1完了領域に含めること
を含む請求項1または2に記載の作業管理方法。 - 前記第1対象領域を抽出することは、
前記作業履歴データに基づき、前記複数の圃場のうち、前記1つ以上の作業装置により前記対象作業が行われた圃場の領域を前記第1対象領域として抽出すること
を含む請求項1から4のいずれか1項に記載の作業管理方法。 - 前記作業履歴データは、前記1つ以上の作業装置が前記複数の圃場において作業を行ったときの第1位置情報を含み、
前記第1対象領域を抽出することは、
前記複数の圃場のうち、前記第1位置情報により表される位置を含む圃場の領域を前記第1対象領域として抽出すること
を含む請求項1から5のいずれか1項に記載の作業管理方法。 - 前記第1対象領域を抽出することは、
前記作業履歴データに基づき、前記複数の圃場のうち、耕作を行っている圃場の領域を前記第1対象領域として抽出すること
を含む請求項1から6のいずれか1項に記載の作業管理方法。 - 前記1つ以上の作業装置から、前記複数の圃場において前記対象作業を行っているときの位置を表す第2位置情報を取得すること
をさらに含み、
前記第1対象領域を抽出することは、
前記複数の圃場のうち、前記第2位置情報により表される位置が含まれる圃場の領域を前記第1対象領域として抽出すること
を含む請求項1から7のいずれか1項に記載の作業管理方法。 - 前記1つ以上の作業装置は、前記複数の圃場において前記対象作業を行っているときの位置を表す位置情報を出力する出力作業装置と、前記位置情報を出力しない不出力作業装置とを含み、
前記対象作業の進捗量を決定することは、
前記位置情報に基づき、前記出力作業装置により前記対象作業が完了した第2完了領域を決定することと、
前記1つ以上の作業装置の数量に対する前記不出力作業装置の数量の装置割合と、前記第2完了領域とに基づき、前記出力作業装置と前記不出力作業装置とにより前記対象作業が完了した前記第1完了領域を決定することと、
を含む請求項1から7のいずれか1項に記載の作業管理方法。 - 前記1つ以上の作業装置は、前記複数の圃場において前記対象作業を行っているときの位置を表す位置情報を出力する出力作業装置と、前記位置情報を出力しない不出力作業装置とを含み、
前記第1対象領域を抽出することは、
前記作業履歴データに基づき、前記出力作業装置を用いて前記対象作業が行われる予定の第2対象領域を決定することと、
前記1つ以上の作業装置の数量に対する前記不出力作業装置の数量の装置割合と、前記第2対象領域とに基づき、前記出力作業装置と前記不出力作業装置とを用いて前記対象作業が行われる予定の前記第1対象領域を決定することと、
を含む請求項1から8のいずれか1項に記載の作業管理方法。 - 複数の圃場で行われた作業を表す作業履歴データに基づき、前記複数の圃場の中から、1つ以上の作業装置を用いて対象作業が行われる予定の第1対象領域を抽出する対象領域決定部と、
前記1つ以上の作業装置により前記対象作業が完了した第1完了領域と、前記第1対象領域とに基づき、前記第1対象領域における前記対象作業の進捗量を決定する進捗量決定部と、
を備える作業管理システム。 - 複数の圃場で行われた作業を表す作業履歴データに基づき、前記複数の圃場の中から、1つ以上の作業装置を用いて対象作業が行われる予定の第1対象領域を抽出することと、
前記1つ以上の作業装置により前記対象作業が完了した第1完了領域と、前記第1対象領域とに基づき、前記第1対象領域における前記対象作業の進捗量を決定することと、
を演算装置に実行させる作業管理プログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022002738A JP7670633B2 (ja) | 2022-01-12 | 2022-01-12 | 作業管理方法、作業管理システム、及び作業管理プログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022002738A JP7670633B2 (ja) | 2022-01-12 | 2022-01-12 | 作業管理方法、作業管理システム、及び作業管理プログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2023102334A JP2023102334A (ja) | 2023-07-25 |
| JP7670633B2 true JP7670633B2 (ja) | 2025-04-30 |
Family
ID=87377135
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022002738A Active JP7670633B2 (ja) | 2022-01-12 | 2022-01-12 | 作業管理方法、作業管理システム、及び作業管理プログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7670633B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7247035B2 (ja) * | 2019-06-28 | 2023-03-28 | キヤノン株式会社 | 制御装置、制御方法、情報処理システム、およびプログラム |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015049871A (ja) | 2013-09-04 | 2015-03-16 | 株式会社クボタ | 農業支援システム |
| JP2017212941A (ja) | 2016-06-01 | 2017-12-07 | 井関農機株式会社 | 作業車両の管理システム |
| JP2019128660A (ja) | 2018-01-22 | 2019-08-01 | 株式会社クボタ | 農業支援システム |
| JP2020177294A (ja) | 2019-04-15 | 2020-10-29 | 国立大学法人 鹿児島大学 | 農作業進捗管理装置、農作業進捗管理システム、農作業進捗管理方法、及び農作業進捗管理プログラム |
-
2022
- 2022-01-12 JP JP2022002738A patent/JP7670633B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015049871A (ja) | 2013-09-04 | 2015-03-16 | 株式会社クボタ | 農業支援システム |
| JP2017212941A (ja) | 2016-06-01 | 2017-12-07 | 井関農機株式会社 | 作業車両の管理システム |
| JP2019128660A (ja) | 2018-01-22 | 2019-08-01 | 株式会社クボタ | 農業支援システム |
| JP2020177294A (ja) | 2019-04-15 | 2020-10-29 | 国立大学法人 鹿児島大学 | 農作業進捗管理装置、農作業進捗管理システム、農作業進捗管理方法、及び農作業進捗管理プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2023102334A (ja) | 2023-07-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11567498B2 (en) | Agriculture support device and agriculture support system | |
| JP7062610B2 (ja) | 作業制御システム | |
| JP7243635B2 (ja) | 施肥設計方法および施肥設計装置 | |
| JP7478066B2 (ja) | 作業管理システム、作業管理方法及び作業管理プログラム | |
| JP7784492B2 (ja) | 作業マップ作成システム、作業マップの生成方法及び作業マップ生成プログラム | |
| JP2020149201A (ja) | 作物の倒伏リスク診断に用いる生育パラメータの測定推奨スポット提示方法、倒伏リスク診断方法、および情報提供装置 | |
| JP7210392B2 (ja) | 農業支援装置 | |
| Sari et al. | Monitoring rice crop and paddy field condition using UAV RGB imagery | |
| CN113994389A (zh) | 农业作业承包系统以及农业作业承包服务器 | |
| CN116490063A (zh) | 作业判定系统、作业判定方法以及记录介质 | |
| JP7636956B2 (ja) | 作業管理方法、作業管理システム、及び作業管理プログラム | |
| JP7670633B2 (ja) | 作業管理方法、作業管理システム、及び作業管理プログラム | |
| JP7080627B2 (ja) | 農業支援システム及び農業支援装置 | |
| WO2022181258A1 (ja) | 作業計画管理方法、作業計画管理装置、作業計画管理システム、及び記憶媒体 | |
| JP7620532B2 (ja) | 圃場管理方法、圃場管理システム、及び圃場管理プログラム | |
| JP2024114141A (ja) | 作業管理方法、作業管理システム、及び作業管理プログラム | |
| JP7510305B2 (ja) | 作業管理システム、作業管理方法及び作業管理プログラム | |
| JP7727377B2 (ja) | 作業支援情報作成システム、作業支援情報の生成方法及び作業支援情報生成プログラム | |
| JP2025035609A (ja) | 圃場管理方法、圃場管理システム、及び圃場管理プログラム | |
| JP7693322B2 (ja) | 農業情報管理システム、プログラム、及び農業情報管理方法 | |
| US20260076286A1 (en) | Computer program, method, and apparatus | |
| JP2024027923A (ja) | 作業管理方法、作業管理システム、及び作業管理プログラム | |
| US20250120335A1 (en) | Work map provision server | |
| JP2020166379A (ja) | 作業代行者斡旋サーバ | |
| JP2025127565A (ja) | 圃場管理方法、圃場管理システム、及び圃場管理プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240220 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20241023 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20241029 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20241211 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20250325 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250417 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7670633 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |