JP7679945B2 - レイリー強度パターン計測装置およびレイリー強度パターン計測方法 - Google Patents
レイリー強度パターン計測装置およびレイリー強度パターン計測方法 Download PDFInfo
- Publication number
- JP7679945B2 JP7679945B2 JP2023552604A JP2023552604A JP7679945B2 JP 7679945 B2 JP7679945 B2 JP 7679945B2 JP 2023552604 A JP2023552604 A JP 2023552604A JP 2023552604 A JP2023552604 A JP 2023552604A JP 7679945 B2 JP7679945 B2 JP 7679945B2
- Authority
- JP
- Japan
- Prior art keywords
- rayleigh
- intensity pattern
- data
- frequency
- correlation coefficient
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


































Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- G01D5/32—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light
- G01D5/34—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells
- G01D5/353—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells influencing the transmission properties of an optical fibre
- G01D5/35338—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells influencing the transmission properties of an optical fibre using other arrangements than interferometer arrangements
- G01D5/35354—Sensor working in reflection
- G01D5/35358—Sensor working in reflection using backscattering to detect the measured quantity
- G01D5/35361—Sensor working in reflection using backscattering to detect the measured quantity using elastic backscattering to detect the measured quantity, e.g. using Rayleigh backscattering
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01K—MEASURING TEMPERATURE; MEASURING QUANTITY OF HEAT; THERMALLY-SENSITIVE ELEMENTS NOT OTHERWISE PROVIDED FOR
- G01K11/00—Measuring temperature based upon physical or chemical changes not covered by groups G01K3/00, G01K5/00, G01K7/00 or G01K9/00
- G01K11/32—Measuring temperature based upon physical or chemical changes not covered by groups G01K3/00, G01K5/00, G01K7/00 or G01K9/00 using changes in transmittance, scattering or luminescence in optical fibres
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M11/00—Testing of optical apparatus; Testing structures by optical methods not otherwise provided for
- G01M11/08—Testing mechanical properties
- G01M11/083—Testing mechanical properties by using an optical fiber in contact with the device under test [DUT]
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M5/00—Investigating the elasticity of structures, e.g. deflection of bridges or air-craft wings
- G01M5/0091—Investigating the elasticity of structures, e.g. deflection of bridges or air-craft wings by using electromagnetic excitation or detection
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Electromagnetism (AREA)
- Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Optical Transform (AREA)
- Length Measuring Devices By Optical Means (AREA)
Description
ここで、図1は、縦方向に記載した6つの先行技術のそれぞれについての代表的な性能を、横方向に展開して記載した6つの指標に区分して、一覧表として示したものである(特許文献1、および非特許文献1-5参照)。
ここで、RIPの計測量としては、式(FS)で表されるレイリー周波数シフト量ΔνRを求める(例えば、特許文献2参照)。
ΔνR=C21Δε+C22ΔT+C23ΔP・・・(FS)
なお、式(FS)において、C21、C22、C23は、レイリー周波数シフトに与える感度係数であり、Δε、ΔT、ΔPは、それぞれ、測定位置における光ファイバの歪、温度変化、圧力変化を示す。
従って、上記周波数シフトは、同じ場所における2つの状態(参照時と観測時)でのTW-COTDR方式の周波数による明確な特徴の比較と考えられる。ここで、TW-COTDR方式と、高精度のブリルアン技術であるPPP-BOTDA(Pulse Pre-Pump Brillouin Optical Time Domain Analysis)方式を復号して、レイリー後方散乱光方式およびブリルアン後方散乱光方式の2方式を使うハイブリッド計測法の要求を調和させることができる。
一方、時間領域におけるレイリー後方散乱光方式は、ブリルアン後方散乱光方式に比較して、以下の利点がある。すなわち、シングルエンド方式のみ要求されること、長距離におけるクリープ監視などの小さな変化を正確に、かつ容易に検出可能であること、位相に対して独立した光ファイバからの信号であるため安定性と高い再現性があること、である。
まず、図1に示した最初の指標である「絶対周波数(絶対基準の周波数)」が未確立であること。先行技術番号2から先行技術番号6に示した、いずれの先行技術も、図1に示したように、LD周波数、あるいは波長の値を制御して誤差を明確にできていない。また、先行技術番号1に示したTW-COTDR方式では、LDの波長(光周波数)を制御してはいるが、絶対値の管理を行ってはいない。従って、(同一メーカーの)異なる機器間、あるいは異なるメーカーの機器間における計測においては、相対的な周波数シフトの値しか得ることができない。
また、長期に亘る監視中に、一度、相関関係がとれなくなると、初期の値との関連性が失われるため、長期の監視ができなくなる。これは、レイリー後方散乱光方式が、原理的に、時間軸方向でデータを蓄積することにより、最終的に変形を計測しているためである。
測定パラメータ;掃引開始周波:192010GHz、掃引期間:400GHz、掃引ステップ:0.2GHz、空間分解能:2cm、サンプリング間隔:1cm。
従来、レイリー後方散乱光方式では、時間方向にデータを蓄積して変形を最終的に求めるようにしているため、データ蓄積中に1個のデータの蓄積が旨く行かなかった場合には、それ以降の計測が、初期値(初期の歪変化量)との相関を失ってしまうからである。
測定パラメータ;掃引開始周波:10GHz、掃引期間:1.45GHz、掃引ステップ:5MHz、空間分解能:5cm、サンプリング間隔:2.5cm。
なお、通常、データを補間することにより相関は改善されるが、今回のケースでは、相関は改善されなかった。なお、データ処理時の周波数(変化)の単位ステップは0.04GHzである。
波長可変LDと、前記波長可変LDから発振されるレーザ光の周波数を変更可能な制御器と、局部発振器と、を有する光源部、
前記光源部から発振されたレーザ光を光ファイバに入射するとともに、前記光ファイバからのレイリー散乱光を前記レーザ光の入射経路とは別の経路で出射する光カップラ、
前記光源部からのローカル光と、前記光カップラからの前記レイリー散乱光と、をコヒーレント受信する受信部、
前記受信部から出力された信号をAD変換するAD変換器と、前記AD変換器で変換された信号を所定の方法で演算する第1の演算部と、前記第1の演算部で演算された信号が入力され保存されるメモリ・データベースと、前記メモリ・データベースに保存されたデータを基に所定の演算を行う第2の演算部と、を有し、前記レイリー散乱光の電界信号から得られる、予め定められた測定位置での異なる2つのレイリー強度パターンから、前記第2の演算部で前記測定位置について所定の補正をした後、相互相関係数を求め、求めた相互相関係数が予め定められた閾値以上となった場合の相互相関係数を前記メモリ・データベースに保存するレイリー強度パターンデジタル処理部、および
整合フィルタ、
を備え、
前記波長可変LDの絶対周波数を制御するとともに、前記波長可変LDから発振されるレーザの周波数をステップ状に走査し、各ステップでパルス化したチャープ信号が前記受信部で受信された後、前記第1の演算部で合成され、かつ
前記チャープ信号が前記整合フィルタにより抽出されたサブバンドにより、複数の窓関数を用いて設定され、前記抽出されたサブバンドの中心周波数を用いることにより、前記サブバンドを再度組み合わせた複数サブバンドを含む前記レイリー強度パターンが前記絶対周波数で保存されるとともに、
予め定められた閾値以上となった相互相関係数を基にレイリー周波数シフトを求めることにより、被測定体の歪分布、あるいは温度分布を定めることを特徴とするものである。
実施の形態1に係るレイリー強度パターン計測装置(以下、簡略化してRIP計測装置とも呼ぶ)の全体構成について、以下、図6、図7を用いて説明する。
本実施の形態1に係るRIP計測装置100は、大別して4つの主要な構成要素を備えている。それらは、光源部11、送受信光学部12、受信部13、RIP確定デジタル処理部14(以下、レイリー強度パターンデジタル処理部14、あるいはRIPデジタル処理部14とも呼ぶ)である。以下、これらの詳細について順に説明する。
すなわち、光源部11では、チャープ光パルスを利用することにより、波長可変のLD1の周波数を制御し、この周波数を複数、ステップ状に変更しつつ(例えば、200GHzで12ステップに変更するなど)掃引する。この場合において、上記TW―LDを活用して、TGD(Time Gated Digital)法等を利用し、高精度光パルスを生成する。なお、TGD法における掃引幅は、例えば、4GHz(サンプルレートは8GS/s)である。
ここで、2chAD変換器6は、例えば、信号の振幅成分と位相成分を、各chに、例えばFPGAチップなどの処理器で変換することが可能である。また、RIPデジタル処理部14では、デジタル手法で信号の強度と位相解析を行うことができる。なお、図においては、上記確定したレイリー周波数シフトΔνR‐Dの出力が、RIPデジタル処理部14の内部に含まれる態様になっているが、RIPデジタル処理部14の外部にあっても良い。
上記判断の結果が「Yes」であれば、求めた相互相関係数の値を基に、レイリー周波数シフトΔνRを求め、求めたレイリー周波数シフトΔνRの値を確定したレイリー周波数シフトΔνR‐Dとして定める(ステップS10)。
そして、この相互相関係数の値が予め定めた閾値より大きくなるまで、上記ステップS9→上記ステップS7→上記ステップS8の動作を繰り返し、相互相関係数の値が予め定めた閾値より大きくなった場合の相互相関係数の値を基にレイリー周波数シフトΔνRを求め、求めたレイリー周波数シフトΔνRの値を、確定したレイリー周波数シフトΔνR-Dとして定める(ステップS10)。
方法1では、2chAD変換器6による処理がないため、処理データの高速処理が可能となる。
方法2では、コムフィルタリング処理をすることで、信号に含まれる周期性ノイズを除去することができ、測定データの高精度化が図れる。
方法3では2乗した信号を用いるため、信号成分のうち、位相の影響を受けることが少なくなり、その分、測定データの高精度化が図れる。
方法4は、方法1から方法3のヘテロダイン受信信号を使用する場合に比べ、位相雑音の少ない狭線幅のLDと光PLLが必要となるが、最も高感度の受信が可能になり、また、高速でのデータ処理がより容易であるというメリットを持つ。
解析法N1は、不均一歪がある場合でも、レイリー散乱光の参照データの電界から得られる参照スペクトル及びそれを変形して得られる種々の参照スペクトルと、観測データの電界から得られる観測スペクトルとの相互相関から、被測定体のひずみ分布を適正に検出することができる解析法である。参照スペクトルの変形は、歪の傾き(後ほど詳しく説明する)に対処するためであり、傾きの大きさにしたがって変形も異なる。以下、この解析法N1に用いられる処理方法(アルゴリズム)について詳しく説明する。
このような場合に、観測値として得られるのは、直接検波で得られる光の強度、あるいはヘテロダイン受信で得られる電界の強度であり、いずれも、P=P(t、ν)と、時間tと周波数νの2つのパラメータによって表される。例えば、レーザ光源の周波数νをスキャンしながら観測値を取得することで、レイリー散乱光のスペクトルデータが得られる。
そこで、以下で、歪、あるいは温度の変化前後のスペクトルをまず検討するため、歪、あるいは温度の変化前のスペクトルをP0(z、ν)と記し、変化後のスペクトルをP1(z、ν)と記す。
そうすると、変化後のスペクトルP1(z、ν)と変化前のスペクトルP0(z、ν)との間には、以下の関係式が成立することが知られている。
そこで、次に、課題となっている、歪、あるいは温度の変化がパルス内で一定でない場合を考える。この場合には、スペクトル間の関係は、上記式(1)の周波数シフトでは表されなくなり、検出性能の劣化をもたらすため、以下詳細に検討する。
計算上の都合により、周波数変数を上述の時間軸での周波数νから、対応する空間周波数(式(2)参照)に変更する。また、レイリー周波数シフトも、下記の式(3)とする。






となるので、相互相関係数のピーク値は結局、式(19)となる。

そこで、例えば、rpeak=0.3のときのDΔνRの値を求めると3.11となる(図8A参照)。この値を適用して、DΔνR≦3.11が適用限界の目安となる。レイリー周波数シフトの傾きに直すと、以下に示す式(20)で表される。

歪、あるいは温度の変化が区間内で一定であればスペクトルのシフトとして変化を検出できるが、傾きを持っていれば、上述のように検出の限界がある。しかしながら、スペクトルの光の強度を求める前の電界データが利用できれば、傾きまで含めた検出が可能になる。以下その方式について説明する。
各距離z(0≦z≦Lf、Lf:ファイバ長)で周波数νを走査したときの電界データY(z、νk)、k=0、1、・・・、K-1が与えられるものとする。νk=kΔνであり、Δνは周波数間隔である。Kは、周波数方向のデータの個数で、KΔνがデータの周波数帯域幅になる。レイリー周波数シフトの傾きbも離散化して、bj、j=0、1、・・・、J-1とする。














なお、lp=0.5mとした。s(z;β)の空間周波数帯域幅は、lpβである。想定されるβの絶対値の最大値をβmaxとおくと、帯域幅の最大は、lpβmaxとなる。
次に、各距離zにおいて、距離方向への傾きまで含めたレイリー周波数の検出法を示す。この検出法においては、レイリー周波数シフトの傾きを考慮しなくても十分な相関が得られる場合には、傾きの検出は行わない。ここでも、計算の都合上、周波数νの代わりに空間周波数u=2ν/vg、レイリー周波数シフトのパラメータa、bの代わりに、α=2a/vg、β=2b/vgを用いて以下表す。これらの関係は、散乱光における距離zと往復の時間tのt=2z/vgの関係と同じであり、同様の換算ができる。
検出法1では、参照スペクトルは周波数領域で求める。
(1)参照データの電界Y0(z、uk)、k=0、1、・・・、K-1が与えられるものとする。これから、各β=βj、j=0、1、・・・、J-1について、参照スペクトルP0(z、uk;βj)を以下に説明する方法で求めておく。
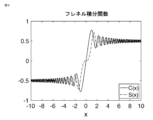
a)チャープのフーリエ変換qlp(u;β)を、上記の式(29)~式(31)から求める。なおZ(・)は式(32)で定義されるフレネル積分関数である。
b)チャープのフーリエ変換と参照データとの周波数領域でのコンボリューションを取る(式(35)参照)。


(3)各距離z、0≦z≦Lfについて、P0(z、u)とP1(z、u)のuをずらしたときの相互相関係数を求め(式(37)参照)、相関の最大値(式(38)参照)が十分大きければ、そこでのずれをαの推定値(式(39)参照)とする。





上述の検出法1では、参照スペクトルを周波数領域でのコンボリューションで求めたが、検出法2では、フーリエ変換を用いて空間領域で積の演算を行ってから、逆フーリエ変換で周波数に戻す方法を用いる。この検出法2の方が計算時間は短縮できる。検出法2では、検出法1の(1)の代わりに、下記(1a)を用いる。なお、検出法2の(2)~(6)については、上記検出法1の(2)~(6)と同じであるので、ここでは詳細な説明は省略する。
(1a)参照データの電界Y0(z、uk)、k=0、1、・・・、K-1が与えられるものとする。uk=kΔuは空間周波数でΔuはその刻み幅である。空間変数の刻み幅はΔζ=1/(KΔu)とし、空間変数は、ζn=nΔζ、n=0、1、・・・、K-1とする。これから、各β=βj、j=0、1、・・・、J-1について、参照スペクトルP0(z、uk;βj)を以下に説明する方法で求めておく。
a)各β=βj、j=0、1、・・・、J-1について空間軸上のチャープs(ζn;βj)を求める。そのため、まず、-K/2≦n≦K/2-1の範囲でs(ζn;βj)を次式(48)に従って求める。




ここでは、チャープ光パルスを用いて受信側で多数の周波数に分割する方式を用いてシミュレーションによる検証を行う。なお、シミュレーションに用いたパラメータは以下のとおりである。
光ファイバの長さは50mである。想定した歪分布を図13A、図13Bに示す。図13Aは、光ファイバの長さ方向における歪の大きさの分布を示した図である。図13Bは、光ファイバの長さ方向における歪の大きさの変化の分布を示した図である。なお、いずれの図においても、横軸は光ファイバの長さ方向の位置(単位:m)を示している。
これらの図から、光ファイバ中の2つの区間で歪があり、20.7m~25.9mの区間では10μεの一様な歪、31.0m~34.1mの区間では一定の傾き30με/mを持った10με~100μεの歪が存在することがわかる。
ここで、歪とレイリー周波数シフトの関係は、以下に示す式(54)で与えられる。
パルス幅:80ns、パルス波形:矩形、周波数掃引幅:4GHz、パルスパワー:100mW、光源線幅:0.3MHz、送信パルス数:16。
個々のチャープ光パルスの周波数掃引範囲:νn~νn+4GHz、パルス間の周波数間隔:νn-νn―1=3.825GHz、個々のチャープ光パルスで設定可能なサブバンド(幅200MHz、間隔:25MHz)の数:153、16のチャープ光パルスで設定可能なサブバンドの数:2448。
チャープパルスによるレイリー散乱光を受信して、チャープのサブバンド毎に分割復調することで、フーリエスペクトルを求める(参照スペクトル、観測スペクトルの両者)。変形した参照スペクトルと観測スペクトルの相関を取ることによりレイリー周波数シフトを求める。なお、シミュレーションにおける傾きのパラメータはΔb=0.5GHz/m(Δβ=4.87cycle/m2)、bj=-60~60GHz/m(βj=-584.4~584.4cycle/m2)、j=j=0、1、・・・、J-1、J=241とした。
また、具体的な結果として、0.15mの空間分解能の場合との比較で、従来の検出法では検出できなかった大きな傾き、例えば50GHz/mの傾きを持つ場合でもシフト量の検出が可能になることを明らかにした。
以上のように、解析法N1により、不均一ひずみ分布に対する有効性を有するレイリー強度パターン計測装置が実現できることを示した。
さらに詳しく言うと、整合フィルタ法を使用し、複数のチャープパルスからシミュレーションデータを作成し、これを基にサブバンドのセットを抽出し、それらを組み合わせることにより、相互相関を求めるためのレイリー強度パターン(RIP)を形成している。
そこで、以下、本実施の形態1におけるレイリー強度パターンを形成するまでの詳細について、実施例をもとに具体的に説明する。
まず、本シミュレーションに用いるひずみ分布のデータを図19に示す。基本的には上記図14で説明したひずみ分布に類似のものである。ここでは、区間20m~25mでは一定の歪10με、30m~33mでは空間分解能空間内に傾き30με/mの不均一な歪を持つ歪分布をモデルとする。なお、上記以外の区間では歪はない(歪はゼロ)。
ここで、図20に示したように、本実施例におけるレーザ線幅は300kHz、パルス幅は80nsである。なお、レーザ線幅は、レイリー後方散乱光信号の位相ノイズを誘発するため、最重要なパラメータの1つである。

以上のように、本実施の形態1のレイリー強度パターン計測装置よれば、高い空間分解能、高速の計測、および十分な計測範囲の3つの特長を同時に実現した、高速・高精度の歪、あるいは温度の計測装置を提供することができることがわかった。
また、数10年以上の長年に渡り、RIP情報の管理が可能となり、計測期間中は、高精度のRIP情報を連続的に取得することができる。
また、空間分解能以下の区間に不均一な歪分布が生じても検出適正化解析法を用いて、周波数シフトを求めることができる。
また、例えば300kHz程度の線幅が不十分なLDを用いても、動的歪を計測することが可能である。
次に、実施の形態2に係るレイリー強度パターン計測装置について、実施の形態1と異なる点を中心に、以下、図を用いて説明する。実施の形態2に係るレイリー強度パターン計測装置では、上述した説明のうち、不均一歪を解消する解析法N1とは異なる解析方法である解析法N2を用いる点のみが異なる。そこで以下、この解析法N2について説明する。
解析法N2においては、不均一歪が存在するような場合であっても、適切な相関が得られるようにするため、以下に説明する離散ウェーブレット変換手法に基づく近似成分復号法(以下、ACD法とも呼ぶ。ACD:Approximation Components Decoding)を用いる。以下、この方法の詳細内容と、レイリー周波数シフト(以下、簡略化してRFSとも呼ぶ)の測定データを用いて、この方法の検証を行った例について説明する。
(a)データ準備工程(前処理工程。解読するデータを取得する工程)
(b)データ分解工程(離散ウェーブレット変換により、データを所定の分解レベルで近似データ部と詳細データ部に分解する工程)
(c)データ再構築工程(上記詳細データ部をゼロとおいて、ウェーブレット逆変換により、データを再構築する工程)
(d)相関係数計算および決定工程(上記再構築データを基に相互相関係数を求め、求めた相関係数が閾値以上となる場合の相関係数を算出する工程)
このACD法を用いれば、従来法では不均一な歪として検知されたレイリー散乱光の信号データを基にして相関係数を求めた場合であっても、適切なRFSが算出できる。そして、この算出したRFSを基に、目的とする歪を検知することができる。そこで、次に、上記各工程の詳細内容について、以下順に図を用いて説明する。
先に図4において点線の長丸で囲んだ領域中の不均一地点で得た生データから選択した、所定距離(例えば、512.5m)における2つの周波数スペクトルデータ(データ1、データ2)(図25A、図25B参照)を取得し、これらのデータを正規化した後、さらに小さい歪を検出する必要がある場合には、周波数ステップに関して複数倍の補間処理を行う。例えば、周波数ステップを0.2GHzから0.04GHzに変更すると、検出できる最小歪は1.32μεが0.264μεとなり、より小さな値まで検出可能となる。そして、その後、相互相関係数(図25C参照)を求める。ここで、例えば、データ1が参照データ、データ2が計測データである。ここで、図25Cに示したように、相互相関係数は、経験的に定めた閾値(0.3)以下の値を示しており、検知が旨く行われていないことがわかる。
上記周波数スペクトルデータは、数多くの周波数成分を含んだ波形と見なせるが、不均一歪分布は、適切な相関が取れなくなる要因となる、波形をゆがめる高周波成分を生じさせる。そこで、この波形をゆがめる要因である高周波成分を取り除くため、以下に述べる離散ウェーブレット変換(以下、離散ウェーブレット変換をDWTとも呼ぶ。ここで、DWT:Discrete wavelet transform)を用いて、上記信号データを分解する。この手法は、信号処理において信号を分解する通常の方法である。
さらに詳しくは、図26に示すように、各近似データ部An(n=1、2、3、・・・)は、レベルが上がるごとに順に、さらに高いレベルの近似データ部An+1(n=1、2、3、・・・)と、詳細データ部Dn(n=1、2、3、・・・)に分解することができる。この場合において、最大レベルは、信号の長さと選択したウェーブレット関数に依存する(ウェーブレット変換においては使用するウェーブレット関数を選択する必要がある。ここでは、正規直交変換関数であるcoif2を選択して使用した)。
そこで、次に、上記データの分解により(この際、ウェーブレット関数coif2を使用する)、求めた詳細データ部であるD1、D2、D3、…、を0(零)とおくことにより、詳細データ部を容易に取り除くことができる。そこで、詳細データ部が取り除かれた、上記詳細データ部との干渉がより少ない近似データ部のみを用いて、ウェーブレット逆変換することにより、詳細データ部が取り除かれたデータを再構築する。
以上のアイデアを分析し拡張することにより、提案するACD法の主要な処理フローを構築する。
次に、上記再構築されたデータ(2つのレイリースペクトルデータ)を基に、これらのデータの相互相関を取り、相関係数を求める。この際、図26に示した分解レベルにより、求めた相関係数の結果が異なることに注意する必要がある(図27参照)。そして、分解レベルが高いほど、信号データ成分がより多く削除されることにより、相関係数が高くなる。一方で、実際のケースを考慮して、可能な限り、詳細な信号データを維持する必要がある。つまり分解レベルを低く抑える必要がある。
そこで、このレベルを調整するため、相関関数の閾値を定め、相関係数がこの閾値を超えれば、相関係数の計算を終了するようにする。そして、これにより定めた相関係数を基にRFSを求めることで、適切な歪の値を計測することが可能となる。
まず、最初に、分解レベルnをn=1とする(ステップS21)。次に、2つのレイリースペクトルのデータを取得する(ステップS22)。次に、各データの分解レベルnでのデータをDWTにより分解し、各データの詳細データ部を零にセットしメモリ・データベースに保存する(ステップS23)。次に、ウェーブレット逆変換により、先に保存したデータのレイリースペクトルデータを再構築する(ステップS24)。そして、再構築された2つのデータの相互相関係数を計算する(ステップS25)。計算した相互相関係数の値を閾値(例えば0.4)と比較し(ステップS26)、閾値より大きければデータ処理を終える。一方、計算した相互相関係数の値が閾値より小さければ、nの値を1だけ増やし(ステップS27)、上記処理フローのステップS23に戻り、上記ステップS23からステップS27までの処理を、計算した相互相関係数の値が閾値より大きくなるまで続ける。
また、図29Bは、このACD法を使って求めた、光ファイバ位置に対応する相関係数の分布である。なお、参考のために、先に図4Aで示した従来の方法で求めた歪の分布のグラフを図29Cに、また、これに対応する、相関係数の分布を図29Dに示した。
なお、このACD法を不均一歪がある場所に適用して、処理が旨くできた点の数と全処理点の数(処理が旨くできた点と処理が旨くできなかった点を合計した点の数)との割合を成功率(単位:%)として、その成功率を調べた結果、90.46%の高い値を示した。
以上により、ACD法が有効であることが判る。
上記解析法N2として、上記ACD法と類似の解析法である基本成分複合法(FCD法とも呼ぶ。FCD:Fundamental Components Decoding)について以下説明する。すなわち、ACD法に代えて、FCD法を解析法N2として用いてもよい。以下、FCD法の内容について、ACD法と異なる点を中心に説明する。
以上の概括的に述べた処理内容をデータ処理フローで図32に示した。以下では、図32を用いて、FCD法におけるデータ処理フローについて説明する。
そして、この解析法N2を用いた場合でも、実施の形態1と同様の効果を得ることができる。
従って、例示されていない無数の変形例が、本願明細書に開示される技術の範囲内において想定される。例えば、以上においては、計測される物理量として、主に歪を例に説明したが、歪を温度に置き換えても同様の議論ができるなど、少なくとも1つの構成要素を変形する場合、追加する場合または省略する場合、さらには、少なくとも1つの構成要素を抽出し、他の実施の形態の構成要素と組み合わせる場合が含まれるものとする。
Claims (9)
- 波長可変LDと、前記波長可変LDから発振されるレーザ光の周波数を変更可能な制御器と、局部発振器と、を有する光源部、
前記光源部から発振されたレーザ光を光ファイバに入射するとともに、前記光ファイバからのレイリー散乱光を前記レーザ光の入射経路とは別の経路で出射する光カップラ、
前記光源部からのローカル光と、前記光カップラからの前記レイリー散乱光と、をコヒーレント受信する受信部、
前記受信部から出力された信号をAD変換するAD変換器と、前記AD変換器で変換された信号を所定の方法で演算する第1の演算部と、前記第1の演算部で演算された信号が入力され保存されるメモリ・データベースと、前記メモリ・データベースに保存されたデータを基に所定の演算を行う第2の演算部と、を有し、前記レイリー散乱光の電界信号から得られる、予め定められた測定位置での異なる2つのレイリー強度パターンから、前記第2の演算部で前記測定位置について所定の補正をした後、相互相関係数を求め、求めた相互相関係数が予め定められた閾値以上となった場合の相互相関係数を前記メモリ・データベースに保存するレイリー強度パターンデジタル処理部、および
整合フィルタ、
を備え、
前記波長可変LDの絶対周波数を制御するとともに、前記波長可変LDから発振されるレーザの周波数をステップ状に走査し、各ステップでパルス化したチャープ信号が前記受信部で受信された後、前記第1の演算部で合成され、かつ
前記チャープ信号が前記整合フィルタにより抽出されたサブバンドにより、複数の窓関数を用いて設定され、前記抽出されたサブバンドの中心周波数を用いることにより、前記サブバンドを再度組み合わせた複数サブバンドを含む前記レイリー強度パターンが前記絶対周波数で保存されるとともに、
予め定められた閾値以上となった相互相関係数を基にレイリー周波数シフトを求めることにより、被測定体の歪分布、あるいは温度分布を定めることを特徴とするレイリー強度パターン計測装置。 - 前記レイリー強度パターンデジタル処理部はFPGAあるいはASICを備え、
前記第1の演算部で前記サブバンドの周波数成分をデジタル処理により取得するとともに、前記第2の演算部で周波数軸での信号の補間処理であるリサンプリング、および前記相互相関係数の演算を含む演算処理を行うことを特徴とする請求項1に記載のレイリー強度パターン計測装置。 - 前記第1の演算部で取得される前記サブバンドの周波数成分は、位相情報を含む非2乗処理のレイリー強度パターンの信号を基に形成されていることを特徴とする請求項2に記載のレイリー強度パターン計測装置。
- 前記第2の演算部は、
前記2つのレイリー強度パターンを基に、各計測において、距離、周波数の双方を変数として求まる相互相関により、測定場所および前記レイリー周波数シフトを解析することを特徴とする請求項1から3のいずれか1項に記載のレイリー強度パターン計測装置。 - 請求項1に記載のレイリー強度パターン計測装置を用いて、レイリー強度パターン計測を行うレイリー強度パターン計測方法であって、
前記求めた相互相関係数が予め定められた閾値より小さい場合には、前記第2の演算部で演算したレイリー強度パターンとは異なるレイリー強度パターンを用いて、与えられた閾値以上の相互相関係数が得られるまで繰り返し演算を行うことを特徴とするレイリー強度パターン計測方法。 - 請求項1に記載のレイリー強度パターン計測装置を用いて、レイリー強度パターン計測を行うレイリー強度パターン計測方法であって、
前記求めた相互相関係数が予め定められた閾値より小さい場合に、
レイリー散乱光の参照データの電界から得られる参照スペクトルと、観測データの電界から得られる観測スペクトルとを基に、各スペクトルの周波数をずらして各スペクトルの相互相関係数を求め、求めた相互相関係数が予め定められた閾値以上である相互相関係数を基に、被測定体のひずみ分布を検出することを特徴とするレイリー強度パターン計測方法。 - 請求項1に記載のレイリー強度パターン計測装置を用いて、レイリー強度パターン計測を行うレイリー強度パターン計測方法であって、
前記求めた相互相関係数が予め定められた閾値より小さい場合に、
レイリー散乱光の参照データの電界から得られる参照スペクトルを種々のチャープレートのチャープ信号で変形させておき、変形された前記参照スペクトルと観測スペクトルとの相互相関を取ることで、被測定体のレイリー散乱光の周波数シフトを計測することを特徴とするレイリー強度パターン計測方法。 - 請求項1に記載のレイリー強度パターン計測装置を用いて、レイリー強度パターン計測を行うレイリー強度パターン計測方法であって、
前記求めた相互相関係数が予め定められた閾値より小さい場合に、
データを所定の分解レベルで近似データ部と詳細データ部に分解する工程、
前記詳細データ部をゼロとおいて、ウェーブレット逆変換により、データを再構築する工程、
再構築されたデータを基に相互相関係数を求め、求めた相関係数が前記閾値以上となる場合の相関係数を算出する工程、
を含む離散ウェーブレット変換手法を用いて傾きを含むレイリー散乱光の周波数シフト量を計測することを特徴とするレイリー強度パターン計測方法。 - 請求項1に記載のレイリー強度パターン計測装置を用いて、レイリー強度パターン計測を行うレイリー強度パターン計測方法であって、
前記求めた相互相関係数が予め定められた閾値より小さい場合に、
規定の測定場所に関して、2つのレイリースペクトルデータをローパスフィルタに通し、当該ローパスフィルタを通過後の2つのレイリースペクトルデータの相関を取った後、得られた相関係数と前記予め定められた閾値とは異なる別の閾値との大小を比較し、当該相関係数が前記別の閾値より小さければ、前記ローパスフィルタのカットオフ周波数を変更して、再度、2つのレイリースペクトルデータをローパスフィルタに通し、当該ローパスフィルタを通過後の2つのレイリースペクトルデータの相関を取り、前記別の閾値との比較を行い、得られた相関係数が前記別の閾値以上になった場合に、当該得られた相関係数からレイリー周波数シフトの値を求めて前記メモリ・データベースに保存するとともに、今回保存したレイリー周波数シフトのデータより前に保存していたレイリー周波数シフトのデータと、今回保存したレイリー周波数シフトのデータとの差の絶対値を複数個求め、求めた絶対値のうち、値が最小となるものを選択して、前記規定の測定場所のレイリー周波数シフトとすることを特徴とするレイリー強度パターン計測方法。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/037005 WO2023058160A1 (ja) | 2021-10-06 | 2021-10-06 | レイリー強度パターン計測装置およびレイリー強度パターン計測方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JPWO2023058160A1 JPWO2023058160A1 (ja) | 2023-04-13 |
| JPWO2023058160A5 JPWO2023058160A5 (ja) | 2024-05-01 |
| JP7679945B2 true JP7679945B2 (ja) | 2025-05-20 |
Family
ID=85803314
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023552604A Active JP7679945B2 (ja) | 2021-10-06 | 2021-10-06 | レイリー強度パターン計測装置およびレイリー強度パターン計測方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20240361159A1 (ja) |
| EP (1) | EP4414666A4 (ja) |
| JP (1) | JP7679945B2 (ja) |
| CN (1) | CN118019963A (ja) |
| WO (1) | WO2023058160A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12436043B2 (en) * | 2022-09-29 | 2025-10-07 | The Government Of The United States Of America, As Represented By The Secretary Of The Navy | Methods providing distributed temperature and strain measurements and related sensors |
| WO2024178397A2 (en) | 2023-02-24 | 2024-08-29 | Elevatebio Technologies, Inc. | Modified immune effector cells and methods of use |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009042005A (ja) | 2007-08-07 | 2009-02-26 | Nippon Telegr & Teleph Corp <Ntt> | 光ファイバを用いた歪・温度の分布測定方法及び測定装置 |
| WO2010061718A1 (ja) | 2008-11-27 | 2010-06-03 | ニューブレクス株式会社 | 分布型光ファイバセンサ |
| JP2011232138A (ja) | 2010-04-27 | 2011-11-17 | Neubrex Co Ltd | 分布型光ファイバセンサ |
| JP2015190917A (ja) | 2014-03-28 | 2015-11-02 | アンリツ株式会社 | 光周波数領域反射測定方法、光周波数領域反射測定装置およびそれを用いた位置または形状を測定する装置 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7440087B2 (en) * | 2004-02-24 | 2008-10-21 | Luna Innovations Incorporated | Identifying optical fiber segments and determining characteristics of an optical device under test based on fiber segment scatter pattern data |
| JP2010190728A (ja) * | 2009-02-18 | 2010-09-02 | Yokogawa Electric Corp | 光ファイバ特性測定装置 |
| JP5851630B2 (ja) | 2012-11-30 | 2016-02-03 | ニューブレクス株式会社 | 3次元位置計測装置 |
| US9766396B2 (en) * | 2015-06-08 | 2017-09-19 | Ofs Fitel, Llc | High backscattering waveguides |
| JP6552983B2 (ja) | 2016-02-29 | 2019-07-31 | ニューブレクス株式会社 | ブリルアン散乱測定方法およびブリルアン散乱測定装置 |
| CN108700435B (zh) * | 2016-03-11 | 2020-10-30 | 光纳株式会社 | 瑞利测定系统及瑞利测定方法 |
| US11566937B2 (en) * | 2019-05-22 | 2023-01-31 | Nec Corporation | Rayleigh fading mitigation via short pulse coherent distributed acoustic sensing with multi-location beating-term combination |
| EP3757522B1 (en) * | 2019-06-28 | 2021-07-21 | Alcatel Submarine Networks | Method and apparatus for suppression of noise due to local oscillator instability in a coherent fiber optical sensor |
-
2021
- 2021-10-06 JP JP2023552604A patent/JP7679945B2/ja active Active
- 2021-10-06 CN CN202180102854.9A patent/CN118019963A/zh active Pending
- 2021-10-06 EP EP21959902.4A patent/EP4414666A4/en active Pending
- 2021-10-06 US US18/684,804 patent/US20240361159A1/en active Pending
- 2021-10-06 WO PCT/JP2021/037005 patent/WO2023058160A1/ja not_active Ceased
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009042005A (ja) | 2007-08-07 | 2009-02-26 | Nippon Telegr & Teleph Corp <Ntt> | 光ファイバを用いた歪・温度の分布測定方法及び測定装置 |
| WO2010061718A1 (ja) | 2008-11-27 | 2010-06-03 | ニューブレクス株式会社 | 分布型光ファイバセンサ |
| JP2011232138A (ja) | 2010-04-27 | 2011-11-17 | Neubrex Co Ltd | 分布型光ファイバセンサ |
| JP2015190917A (ja) | 2014-03-28 | 2015-11-02 | アンリツ株式会社 | 光周波数領域反射測定方法、光周波数領域反射測定装置およびそれを用いた位置または形状を測定する装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN118019963A (zh) | 2024-05-10 |
| JPWO2023058160A1 (ja) | 2023-04-13 |
| EP4414666A1 (en) | 2024-08-14 |
| WO2023058160A1 (ja) | 2023-04-13 |
| EP4414666A4 (en) | 2025-07-30 |
| US20240361159A1 (en) | 2024-10-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10539476B2 (en) | Temperature or strain distribution sensor comprising a coherent receiver to determine a temperature or a strain associated with a device under test | |
| CN111854811B (zh) | 使用参考光纤干涉数据配准测量的光纤干涉数据 | |
| US10209138B2 (en) | Filtering distributed sensing data | |
| US20210404909A1 (en) | Optical fiber recognition using backscattering pattern | |
| US12050150B2 (en) | Spectral averaging of OTDR traces | |
| JP7679945B2 (ja) | レイリー強度パターン計測装置およびレイリー強度パターン計測方法 | |
| KR102285916B1 (ko) | 파장 튜닝가능 레이저를 사용하는 정밀 위치설정 시스템 | |
| CN111868482A (zh) | 用于正负号正确地确定物理参数的变化的方法和具有光学纤维的装置 | |
| US9546915B2 (en) | Enhancing functionality of reflectometry based systems using parallel mixing operations | |
| US9404831B2 (en) | Arrayed wave division multiplex to extend range of IOFDR fiber bragg sensing system | |
| EP4386371B1 (en) | Signal processing method for optical fiber distribution measurement | |
| JP6180961B2 (ja) | 干渉計の較正方法及びこの較正方法を用いた干渉計 | |
| JP5207252B2 (ja) | 光周波数領域反射測定方法及び光周波数領域反射測定装置 | |
| JP6095235B2 (ja) | 光物性定数計測方法および光物性定数推定装置 | |
| JP7816705B2 (ja) | スペクトル測定方法及びスペクトル測定装置 | |
| Basumallick et al. | Simulation of Adaptive Wavelet Packets in Spatial Domain for Signal Demodulation in Optical Frequency Domain Reflectometry | |
| Muping et al. | A direct-detecting COTDR based on wavelet smoothing DSP technique | |
| Sahoo et al. | Measurements and Signal Processing for Distributed Sensing with Centimeter-Scale Spatial Resolution by BOFDA |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240205 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240205 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240216 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20250107 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20250217 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20250401 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250423 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7679945 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |