JP7699000B2 - 表示制御システム - Google Patents
表示制御システム Download PDFInfo
- Publication number
- JP7699000B2 JP7699000B2 JP2021114559A JP2021114559A JP7699000B2 JP 7699000 B2 JP7699000 B2 JP 7699000B2 JP 2021114559 A JP2021114559 A JP 2021114559A JP 2021114559 A JP2021114559 A JP 2021114559A JP 7699000 B2 JP7699000 B2 JP 7699000B2
- Authority
- JP
- Japan
- Prior art keywords
- information
- route
- vehicle
- display control
- display
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3407—Route searching; Route guidance specially adapted for specific applications
- G01C21/3415—Dynamic re-routing, e.g. recalculating the route when the user deviates from calculated route or after detecting real-time traffic data or accidents
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
- G01C21/3667—Display of a road map
- G01C21/3676—Overview of the route on the road map
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3453—Special cost functions, i.e. other than distance or default speed limit of road segments
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/28—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network with correlation of data from several navigational instruments
- G01C21/30—Map- or contour-matching
- G01C21/32—Structuring or formatting of map data
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3407—Route searching; Route guidance specially adapted for specific applications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
- G01C21/3667—Display of a road map
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Automation & Control Theory (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Navigation (AREA)
- Instructional Devices (AREA)
- Traffic Control Systems (AREA)
Description
このうち、自動運転レベルが3以上(自動運転レベル3では運転支援モードを含む)の自動運転が、実用段階に差し掛かっている。
自動運転レベルが3以上の自動運転においては、例えば、サーバ等から、地物等の詳細情報を含めた最新の情報から構成される高精細地図を入手して、その情報に基づいて、自動運転を行うことが想定されている。
つまり、ナビゲーション用地図は、頻繁に情報の更新が行われる高精細地図よりも地図情報が古い。
そのため、ナビゲーション用地図と高精細地図とにおける地図情報の違いにより、ナビゲーション用地図には無い道路を車両が走行しているような表示がなされたり、マップマッチング機能の影響によって、車両がジグザグ走行をしているような表示がなされると、車両の乗員に違和感を与えるという課題があった。
図1から図10を用いて、本実施形態に係る表示制御システム1について説明する。
図1に示すように、本実施形態に係る表示制御システム1は、車両用ナビゲーション装置100と、表示制御装置200と、を含んで構成されている。
第1地図情報としてのナビゲーション地図情報は、一定間隔で更新される。
車両用ナビゲーション装置100は、交通情報等の道路状況に関する情報を受信し、検索した経路を含む周辺道路の渋滞情報等を併せて表示する。
なお、本実施形態においては、車両用ナビゲーション装置100を搭載する自車両の運転主体が車両である場合に、後述する表示制御装置200から送信された一部の経路について、表示形態を変更する表示情報に基づいて、後述する表示部における表示形態を変更して表示する。
図2に示すように、本実施形態に係る車両用ナビゲーション装置100は、記憶部110と、位置情報取得部120と、経路情報検索部130と、表示部140と、表示制御部150と、を含んで構成されている。
具体的には、記憶部110は、地図表示、施設検索、経路探索等のナビゲーションに必要なナビゲーション用地図情報が格納されている記憶媒体およびその読み取り装置である。
記憶部110は、ハードディスク装置や半導体メモリによって、構成されていてもよい。
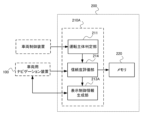
図3に示すように、本実施形態に係る表示制御装置200は、プロセッサー210と、メモリ220と、を含んで構成されている。
また、本実施形態においては、特に、後述する運転主体判定部211、信頼度算出部212、表示制御情報生成部213等の機能を実行する。
本実施形態においては、例えば、車両用ナビゲーション装置100からの経路情報と、後述する信頼度算出部212において算出された信頼度とを紐付けて、RAMに格納する。
図3に示すように、プロセッサー210は、運転主体判定部211と、信頼度算出部212と、表示制御情報生成部213と、を含んで構成されている。
運転主体判定部211は、判定結果を信頼度算出部212に出力する。
また、図示しないサーバ等から取得する場合には、信頼度算出部212が直接、取得するようにしてもよい。
「推奨度が近似する経路の数」とは、例えば、自車両の現在位置からある特定の地点までの経路情報が複数ある場合に、その1の経路情報について、上記推奨度が近似する経路情報の数である。
「近似」は、相互の数値や度合いで判定してもよいし、「推奨度」がレベル分けされている場合には、同一のレベルを「近似」としてもよい。
また、「一定期間の再検索数」とは、例えば、ナビゲーション地図情報に含まれる特定の経路情報について、経路情報の再検索が行われた回数である。
また、「表示領域」とは、例えば、ナビゲーション用地図情報に含まれる特定の経路情報について、その経路情報を表示部140の表示画面に表示した場合の縮尺である。
なお、「経路」には、自車両の現在位置から目的地までの間に、高精細地図の経路と交わる地点(経由地)がある場合には、自車両の現在位置から経由地、経由地間、経由地から目的地を含む。
図4から図10を用いて、本実施形態に係る表示制御システム1の処理について説明する。
運転主体判定部211が、自車両の運転主体が車両ではないと判定した場合(ステップS101の「NO」)には、処理をステップS101に戻す。
ここで、図5は、信頼度算出部212において、経路情報ごとの信頼度を例示している。
図5に示すように、信頼度は、信頼度が高い順にA~Eの5段階のレベルに区分されており、同図では、レベルC以下を信頼度が低いとしている。
信頼度の算出に用いられる推奨度、推奨度が近似する経路の数、一定期間の再検索数、表示領域のパラメータのうち、推奨度は、最も高いものを「5」とする5段階のレベルに区分されている。
また、推奨度が近似する経路の数および一定期間の再検索数は、数が多いものから順に5段階のレベルに区分されている。
さらに、表示領域は、領域が広い順に5段階のレベルに区分されている。
ここで、所定値とは、全ての信頼度の平均値、あるいは、仕様に応じた値等を例示することができる。なお、所定値は、適宜、変更してもよい。
なお、信頼度表示処理の詳細については、後述する。
図6から図9を用いて、本実施形態に係る信頼度表示処理について説明する。
そして、この場合、当該経路情報の信頼度は、低いことから、表示制御情報を生成する(ステップS1055)。
つまり、第1地図情報(ナビゲーション用地図)に存在しない経路については、推奨度が存在することはないため、これ以外のパラメータのレベルに因らず、信頼度算出部212において算出される信頼度は「0」となり、そのレベルは、「E」となる。
そのため、当該経路情報の信頼度は低いと判定され、表示制御情報生成部213は、表示制御情報を生成する。
図5、図7を用いて、具体的に説明すると、図5において、上記条件に当てはまる経路は、例えば、「経路3」となる。
図5の「経路3」は、自車両MBが走行する経路であり、高精細地図上の経路(図7の点線)であって、経由地WPで第1地図情報の経路(図7の実線)と交わる。
そのため、表示制御情報生成部213は、例えば、自車両MBから経由地WPまでの経路の表示として、他の経路とは異なる太字の二点鎖線表示とする表示制御情報を生成する。
一方、表示制御情報生成部213は、該経路情報が第1地図情報(ナビゲーション用地図)に存在すると判定した場合(ステップS1051の「YES」)には、処理をステップS1052に遷移させる。
図5、図8を用いて、具体的に説明すると、図5において、上記条件に当てはまる経路は、例えば「経路1」となる。
「経路1」は、図5に示すように、推奨度レベルが「3」であり、同じ推奨度レベル「3」の経路は、経路Z、経路αの2つがある。
つまり、自車両が走行している表示部140に表示されている経路が、例えば、図5の「経路1」である場合には、当該「経路1」が「同じレベルの推奨度を有する経路が複数ある」という条件を満たす(ステップS1052の「YES」)ことになる。
加えて、図5に示すように、「経路1」と「経路Z」は、信頼度が「C」レベルで、信頼度が低い経路に分類されるため、図8に示すように、「経路1」と「経路Z」とについては、自車両MBから経由地WPまでの経路の表示として、太字の二点鎖線表示とする表示制御情報を生成する。
また、「経路α」は、信頼度が「B」レベルで、信頼度が高い経路に分類されるため、図8に示すように、通常の表示形態、つまり、太字実線で表示される。
なお、推奨度が同レベルである複数の経路情報は、自車両が走行中であっても、表示部140に表示し続けるよう制御される。
一方で、表示制御情報生成部213は、自車両が走行している表示部140に表示されている経路と同じレベルの推奨度を有する経路が複数ないと判定する場合(ステップS1052の「NO」)には、処理をステップS1053に遷移させる。
図5、図8を用いて、具体的に説明すると、図5において、上記条件に当てはまる経路は、例えば「経路X」となる。
つまり、図5に示すように、「経路X」は、一定期間の再検索数レベルが「5」であり、「再検索数が一定以上である」という条件を満たす(ステップS1053の「YES」)ことになる。
加えて、図5に示すように、「経路X」は、信頼度が「D」レベルで、信頼度が低い経路に分類されるため、図8に示すように、「経路X」については、自車両MBから経由地WPまでの経路の表示として、太字の二点鎖線表示とする表示制御情報を生成する。
一方で、表示制御情報生成部213は、自車両が走行している表示部140に表示されている経路について、経路の再検索が一定以上でないと判定する場合(ステップS1053の「NO」)には、処理をステップS1054に遷移させる。
図5、図8を用いて、具体的に説明すると、図5において、上記条件に当てはまる経路は、例えば「経路Y」となる。
つまり、図5に示すように、「経路Y」は、表示領域レベルが「5」であり、「表示領域が所定領域以上である」という条件を満たす(ステップS1054の「YES」)ことになる。
加えて、図5に示すように、「経路Y」は、信頼度が「D」レベルで、信頼度が低い経路に分類されるため、図10に示すように、「経路Y」については、自車両MBから経由地WPまでの経路の表示として、太字の二点鎖線表示とする表示制御情報を生成する。
一方で、表示制御情報生成部213は、自車両が走行している表示部140に表示されている経路について、表示領域が所定領域以上でないと判定する場合(ステップS1054の「NO」)には、処理を終了遷移させる。
以上、説明したように、本実施形態に係る表示制御システム1は、車両用ナビゲーション装置100と、表示制御装置200と、を含み、表示制御装置200の1つまたは複数のプロセッサー210は、自車両MBの運転主体を判定し、判定した自車両MBの運転主体が車両である場合に、少なくとも、第1地図情報に含まれる経路情報の信頼度を算出し、車両用ナビゲーション装置100の表示部140の経路情報の表示態様を信頼度に応じて、変更する表示制御情報を表示制御部150に送信する。
つまり、本実施形態に係る表示制御システム1は、自動運転モードあるいは運転支援モードの車両において、少なくとも、第1地図情報に含まれる経路情報の信頼度を算出し、車両用ナビゲーション装置100の表示部140の経路情報の表示態様を信頼度に応じて変更する。
そのため、自車両が走行しようとする走行経路の表示態様を信頼度に応じて変更することによって、自動運転モードあるいは運転支援モード中に発生する予期せぬ経路変更を事前に、車両の乗員に対して予め認知させ、車両の乗員の違和感を緩和することができる。
1度定まった信頼度は、経路を構成する道路やその周辺環境が大きく様変わりしなければ変化しない。
加えて、ナビゲーション用地図は、更新プロセスに要する時間やコストを抑えるために一定間隔でしか更新されない。
そのため、算出した信頼度を第1地図情報と紐付けてメモリに格納しておけば、検索された経路情報に対して、短時間に、その経路情報に関する信頼度へのアクセスが可能となり、即時に、表示形態を変更することができる。
自車両の位置情報に基づく経路情報が第1地図情報の経路情報と一致しないということは、自車両の位置情報に基づく経路情報が第1地図情報に存在しない経路情報であることである。
自車両の位置情報に基づく経路情報が第1地図情報に存在しない経路情報であれば、推奨度が存在することはないため、これ以外のパラメータのレベルに因らず、信頼度のレベルは当然に低いものとなる。
自車両の位置情報に基づく経路情報と推奨度が同レベルである推奨経路情報が複数存在する場合には、いずれの推奨経路も自車両が走行する可能性がある。
そのため、自車両の位置情報に基づく経路情報と推奨度が同レベルである推奨経路情報が複数存在する場合に、推奨経路情報の信頼度を低く算出あるいは評価することにより、いずれの推奨経路を自車両が走行する場合であっても、車両の乗員に対して予め認知させ、車両の乗員の違和感を緩和することができる。
自車両の位置情報に基づく経路情報と推奨度が同レベルである推奨経路情報が複数存在する場合には、いずれの推奨経路も自車両が走行する可能性がある。
そのため、自車両の位置情報に基づく経路情報と推奨度が同レベルである推奨経路情報が複数存在する場合に、推奨経路情報の信頼度を低く算出あるいは評価し、これらの推奨経路情報を自車両が走行中であっても、表示し続けることにより、いずれの推奨経路を自車両が走行する場合であっても、車両の乗員に対して予め認知させ、車両の乗員の違和感を緩和することができる。
当初の経路を車両が逸脱した場合に実行される経路再検索数が一定数以上である経路情報については、ナビゲーション用地図と車両側との経路選択がマッチングしていない可能性が高い。
そのため、当初の経路を車両が逸脱した場合に実行される経路再検索数が一定数以上である経路情報の信頼度を低く算出あるいは評価し、その旨の表示を行うことにより、車両の乗員に対して予め、その旨を認知させ、車両の乗員の違和感を緩和することができる。
ここで、「所定領域」とは、高精細地図を表示できる範囲を例示することができる。
つまり、表示部140における表示領域が、所定領域以上となっている場合には、例えば、表示部140における表示領域が、高精細地図を表示できる範囲を超えていることになる。
そのため、表示部140における表示領域が、所定領域以上となる経路情報の信頼度を低く算出あるいは評価し、その旨の表示を行うことにより、車両の乗員に対して予め、その旨を認知させ、車両の乗員の違和感を緩和することができる。
図11から図14を用いて、本実施形態に係る表示制御システム1について説明する。
図11に示すように、プロセッサー210Aは、運転主体判定部211と、表示制御情報生成部213Aと、信頼度評価部214と、を含んで構成されている。
なお、第1の実施形態と同様の符号を付す構成要素については、同様の機能を有することから、その詳細な説明は、省略する。
具体的には、例えば、信頼度評価部214は、車両用ナビゲーション装置100から自車両の位置情報(緯度経度情報)と検索経路の位置情報(緯度経度情報)とを取得し、自車両の位置情報と所定距離離れた経路情報について、その信頼度を低く評価する。
ここで、「所定距離」としては、一般に、相当離れた距離と認識する距離をいい、例えば、1kmを例示することができる。
図12、図13を用いて、本実施形態に係る表示制御システム1の処理について説明する。
運転主体判定部211が、自車両の運転主体が車両ではないと判定した場合(ステップS101の「NO」)には、処理をステップS101に戻す。
例えば、信頼度評価部214は、自車両の位置情報と所定距離(図13の「L」)離れた経路情報について、その信頼度を低く評価する。
ここで、「信頼度の評価が低い」とは、全ての信頼度の評価の平均よりも低い場合を例示することができる。なお、評価判定の基準は、適宜、変更してもよい。
なお、表示制御情報生成部213Aは、図13に示すように、検索経路を太字2点鎖線で表示するような表示制御情報を生成する。
以上、説明したように、本実施形態に係る表示制御システム1は、自車両の位置情報と所定距離離れた経路情報の信頼度を低く評価する。
自車両の位置情報と所定距離離れた経路には、その経路以外にも他の候補経路が存在する可能性が高い。
そのため、自車両の位置情報と所定距離離れた経路の信頼度を低く評価し、表示態様を変更することによって、自動運転モードあるいは運転支援モード中に発生する予期せぬ経路変更を事前に、車両の乗員に対して予め認知させることにより、車両の乗員の違和感を緩和することができる。
第1の実施形態においては、第1地図情報に含まれない経路の表示形態を変更することを示したが、自車両が、第1地図情報にはない経路を走行した場合には、その走行した軌跡を表示し、その軌跡を車両用ナビゲーション装置100に記憶させるようにしてもよい。
このように、第1地図情報にはない経路を走行した軌跡を保存しておけば、自車両が同じ経路を走行した場合に、速やかに、当該経路の表示形態を車両用ナビゲーション装置100側で変更することが可能となる。
実施形態において説明した車両用ナビゲーション装置100が、クラウド型のナビゲーション装置である場合に、自車両が、第1地図情報にはない経路を走行した場合には、その走行した軌跡をクラウドサーバに送信するとともに、格納する。
このように処理することにより、自車両が、再び同じ経路を走行した場合に、クラウドサーバからデータを受信するタイミングで、当該経路の表示形態を変更した表示形態で表示することができる。
100;車両用ナビゲーション装置
110;記憶部
120;位置情報取得部
130;経路情報検索部
140;表示部
150;表示制御部
200;表示制御装置
210;プロセッサー
210A;プロセッサー
211;運転主体判定部
212;信頼度算出部
212A;信頼度算出部
213;表示制御情報生成部
213A;表示制御情報生成部
214;信頼度評価部
220;メモリ
Claims (8)
- 第1地図情報を記憶する記憶部と、
自車両の位置情報を取得する位置情報取得部と、
前記自車両の位置情報と、ユーザが設定した目的地情報と、前記第1地図情報と、に基づいて、経路情報を設定する経路情報設定部と、
前記自車両の乗員に対して、前記第1地図情報と、前記経路情報と、前記自車両の位置情報と、を表示する表示部と、
前記表示部における情報の表示態様を制御する表示制御部と、
を含む車両用ナビゲーション装置と、
表示制御装置と、
を含み、
前記表示制御装置は、1つまたは複数のプロセッサーと、前記1つまたは複数のプロセッサーに通信可能に接続される1つまたは複数のメモリと、を備え、
前記1つまたは複数のプロセッサーは、
前記自車両の運転主体を判定し、判定した前記自車両の運転主体が車両である場合に、少なくとも前記第1地図情報に含まれる前記経路情報の信頼度を数1に基づいて算出し、前記表示部の前記経路情報の表示態様を前記信頼度に応じて、変更する表示態様情報と前記自車両の位置と前記第1地図情報の経路と高精細地図の経路とが交わる経由地とを含む領域を表示領域とする表示領域情報とを含む表示制御情報を前記表示制御部に送信することを特徴とする表示制御システム。

- 前記1つまたは複数のプロセッサーは、算出あるいは評価した前記信頼度を前記第1地図情報と紐付けて前記メモリに格納することを特徴とする請求項1に記載の表示制御システム。
- 前記1つまたは複数のプロセッサーは、前記自車両の前記位置情報に基づく前記経路情報が前記第1地図情報の前記経路情報と一致しなかった前記経路情報の信頼度を低く算出あるいは評価することを特徴とする請求項1に記載の表示制御システム。
- 前記1つまたは複数のプロセッサーは、前記自車両の位置情報に基づく前記経路情報と推奨度が同レベルである推奨経路情報が複数存在する場合に、前記推奨経路情報の信頼度を低く算出あるいは評価することを特徴とする請求項1に記載の表示制御システム。
- 前記1つまたは複数のプロセッサーは、前記推奨度が同レベルである複数の前記経路情報を前記表示部に表示し続けるよう制御することを特徴とする請求項4に記載の表示制御システム。
- 前記1つまたは複数のプロセッサーは、当初の経路を車両が逸脱した場合に実行される経路再検索数が一定数以上である前記経路情報の信頼度を低く算出あるいは評価することを特徴とする請求項1に記載の表示制御システム。
- 前記1つまたは複数のプロセッサーは、前記表示部における表示領域が、所定領域以上となる前記経路情報の信頼度を低く算出あるいは評価することを特徴とする請求項1に記載の表示制御システム。
- 前記1つまたは複数のプロセッサーは、前記自車両の位置情報と所定距離離れた前記経路情報の信頼度を低く算出あるいは評価することを特徴とする請求項1に記載の表示制御システム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021114559A JP7699000B2 (ja) | 2021-07-09 | 2021-07-09 | 表示制御システム |
| CN202210687687.5A CN115597616A (zh) | 2021-07-09 | 2022-06-16 | 显示控制系统 |
| US17/853,207 US12392621B2 (en) | 2021-07-09 | 2022-06-29 | Display control system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021114559A JP7699000B2 (ja) | 2021-07-09 | 2021-07-09 | 表示制御システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2023010433A JP2023010433A (ja) | 2023-01-20 |
| JP7699000B2 true JP7699000B2 (ja) | 2025-06-26 |
Family
ID=84798394
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021114559A Active JP7699000B2 (ja) | 2021-07-09 | 2021-07-09 | 表示制御システム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US12392621B2 (ja) |
| JP (1) | JP7699000B2 (ja) |
| CN (1) | CN115597616A (ja) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006071555A (ja) | 2004-09-03 | 2006-03-16 | Aisin Aw Co Ltd | ナビゲーション装置の渋滞表示方法 |
| JP2012137497A (ja) | 2012-03-05 | 2012-07-19 | Pioneer Electronic Corp | 経路表示装置、経路表示方法、経路表示プログラムおよびコンピュータに読み取り可能な記録媒体 |
| JP2017003310A (ja) | 2015-06-05 | 2017-01-05 | 株式会社デンソー | 自動走行制御装置、自動走行用車載装置、自動走行制御方法 |
| JP2018189549A (ja) | 2017-05-09 | 2018-11-29 | アルパイン株式会社 | ナビゲーション装置 |
| US20190346275A1 (en) | 2016-11-09 | 2019-11-14 | Inventive Cogs (Campbell) Limited | Vehicle route guidance |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0781872B2 (ja) * | 1990-12-06 | 1995-09-06 | 住友電気工業株式会社 | 位置検出精度判定方法およびその方法を用いた車両誘導装置 |
| KR101168423B1 (ko) * | 2003-02-05 | 2012-07-25 | 가부시키가이샤 자나비 인포메틱스 | 내비게이션 장치의 경로 탐색 방법 및 교통 정보 표시 방법 |
| JP4255007B2 (ja) * | 2003-04-11 | 2009-04-15 | 株式会社ザナヴィ・インフォマティクス | ナビゲーション装置、およびその旅行時間算出方法 |
| JP5271637B2 (ja) * | 2008-08-28 | 2013-08-21 | アイシン・エィ・ダブリュ株式会社 | 走行経路評価システム及び走行経路評価プログラム |
| CN105701962A (zh) * | 2014-11-28 | 2016-06-22 | 英业达科技有限公司 | 防止走失的警示方法及防止走失的警示系统 |
| WO2016090282A1 (en) * | 2014-12-05 | 2016-06-09 | Cowbyt Technologies Llc | Autonomous navigation system |
| JP6558051B2 (ja) * | 2015-04-28 | 2019-08-14 | 株式会社Jvcケンウッド | 無線装置、管理装置、プログラム |
| JP2017173286A (ja) | 2016-03-26 | 2017-09-28 | アルパイン株式会社 | 走行経路設定装置および走行経路設定方法 |
| US20190036842A1 (en) * | 2017-07-31 | 2019-01-31 | Cisco Technology, Inc. | Traffic steering in fastpath |
| KR102441068B1 (ko) * | 2017-10-13 | 2022-09-06 | 현대자동차주식회사 | 운전자 주행 보조 시스템 사용 패턴 기반 차량 경로 안내 시스템 및 그 방법 |
| US11068735B2 (en) * | 2017-12-05 | 2021-07-20 | Denso Corporation | Reliability calculation apparatus |
| US11428540B1 (en) * | 2019-02-14 | 2022-08-30 | United Services Automobile Association (Usaa) | Systems and methods for routing vehicles |
| US20210011920A1 (en) * | 2019-03-15 | 2021-01-14 | SparkCognition, Inc. | Architecture for data analysis of geographic data and associated context data |
| JP7327477B2 (ja) * | 2019-05-28 | 2023-08-16 | 日産自動車株式会社 | ナビゲーション装置、自動運転制御装置、及びナビゲーション方法 |
| JP7361535B2 (ja) * | 2019-08-28 | 2023-10-16 | 日立Astemo株式会社 | 電子制御装置 |
| US11643103B2 (en) * | 2020-09-24 | 2023-05-09 | GM Global Technology Operations LLC | Navigation considering route driving difficulty |
| DE102021201529A1 (de) * | 2021-02-17 | 2022-08-18 | Continental Teves Ag & Co. Ohg | Verfahren zum Bestimmen einer Route für einen mobilen Benutzer |
| US11725955B2 (en) * | 2021-03-01 | 2023-08-15 | Mitre Corporation | Method and system for dynamically navigating routes according to safety-related risk profiles |
-
2021
- 2021-07-09 JP JP2021114559A patent/JP7699000B2/ja active Active
-
2022
- 2022-06-16 CN CN202210687687.5A patent/CN115597616A/zh active Pending
- 2022-06-29 US US17/853,207 patent/US12392621B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006071555A (ja) | 2004-09-03 | 2006-03-16 | Aisin Aw Co Ltd | ナビゲーション装置の渋滞表示方法 |
| JP2012137497A (ja) | 2012-03-05 | 2012-07-19 | Pioneer Electronic Corp | 経路表示装置、経路表示方法、経路表示プログラムおよびコンピュータに読み取り可能な記録媒体 |
| JP2017003310A (ja) | 2015-06-05 | 2017-01-05 | 株式会社デンソー | 自動走行制御装置、自動走行用車載装置、自動走行制御方法 |
| US20190346275A1 (en) | 2016-11-09 | 2019-11-14 | Inventive Cogs (Campbell) Limited | Vehicle route guidance |
| JP2018189549A (ja) | 2017-05-09 | 2018-11-29 | アルパイン株式会社 | ナビゲーション装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN115597616A9 (zh) | 2024-09-20 |
| CN115597616A (zh) | 2023-01-13 |
| JP2023010433A (ja) | 2023-01-20 |
| US12392621B2 (en) | 2025-08-19 |
| US20230011204A1 (en) | 2023-01-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4069378B2 (ja) | ナビゲーション装置並びに該装置用プログラム及び記録媒体 | |
| US10126743B2 (en) | Vehicle navigation route search system, method, and program | |
| CN105431711B (zh) | 路径搜索系统、路径搜索方法以及记录介质 | |
| US8977487B2 (en) | Navigation device and guide route search method | |
| JP2004239864A (ja) | ナビゲーション装置並びに該装置用プログラム及び記録媒体 | |
| JP5741478B2 (ja) | 道路情報提供装置 | |
| US7418340B2 (en) | Navigation device | |
| US8989997B2 (en) | Map display system, method, and program | |
| JP7699000B2 (ja) | 表示制御システム | |
| JP4728753B2 (ja) | 経路探索装置 | |
| JP2025124878A (ja) | 表示装置、制御方法、プログラム及び記憶媒体 | |
| JP4989981B2 (ja) | ナビゲーション装置 | |
| JP2009222409A (ja) | 情報出力装置、情報出力方法、情報出力プログラムおよび記録媒体 | |
| JP5055052B2 (ja) | 経路探索システム、データ処理装置、データ配信装置、ナビゲーション装置 | |
| JP2015025705A (ja) | 渋滞情報表示システム及び渋滞情報表示プログラム | |
| JP2022128502A (ja) | 表示制御装置、表示制御方法、表示制御プログラム及び表示制御プログラムを記録したコンピュータ読み取り可能な記録媒体 | |
| JPH09257503A (ja) | 経路探索方法 | |
| JP7793308B2 (ja) | 車両用ナビゲーション装置 | |
| JP2018036068A (ja) | 表示制御装置、表示制御方法、表示制御プログラム及び表示制御プログラムを記録したコンピュータ読み取り可能な記録媒体 | |
| WO2016084525A1 (ja) | 案内情報表示システム、案内情報表示方法、及び案内情報表示プログラム | |
| JP2023130974A (ja) | 車両用ナビゲーション装置 | |
| JP2014149225A (ja) | ナビゲーション装置、ナビゲーション方法、ナビゲーションプログラム、案内装置、案内方法、及び案内プログラム | |
| JP5144961B2 (ja) | ナビゲーション装置 | |
| JP4729930B2 (ja) | 案内経路生成装置および案内経路生成方法 | |
| JP4628249B2 (ja) | ナビゲーション装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240606 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20250116 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20250121 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20250319 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20250520 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250616 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7699000 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |