JP7705960B2 - 電子制御装置、及びオブジェクトの管理方法 - Google Patents
電子制御装置、及びオブジェクトの管理方法 Download PDFInfo
- Publication number
- JP7705960B2 JP7705960B2 JP2023570643A JP2023570643A JP7705960B2 JP 7705960 B2 JP7705960 B2 JP 7705960B2 JP 2023570643 A JP2023570643 A JP 2023570643A JP 2023570643 A JP2023570643 A JP 2023570643A JP 7705960 B2 JP7705960 B2 JP 7705960B2
- Authority
- JP
- Japan
- Prior art keywords
- blind spot
- area
- solid
- spot area
- objects
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images








Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Theoretical Computer Science (AREA)
- Traffic Control Systems (AREA)
- Alarm Systems (AREA)
- Geophysics And Detection Of Objects (AREA)
Description
Claims (5)
- 電子制御装置であって、
外界センサが取得した外界情報に基づいて、周囲の物体を認識する物体認識部と、
前記認識された物体のうち、前記外界センサによる観測を遮蔽して死角領域を生成する物体に関する障害オブジェクトを生成する障害オブジェクト生成部と、
前記障害オブジェクトが生成する死角領域を死角オブジェクトとして管理する死角オブジェクト管理部と、
前記死角オブジェクトの情報を用いて、車両の走行危険度を示す潜在リスクを計算するリスク計算部とを備え、
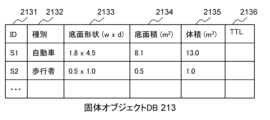
前記物体認識部は、前記認識された物体のうち、前記死角領域に出入り可能な物体に関する固体オブジェクト情報を生成し、
前記死角オブジェクト管理部は、前記死角領域に入った固体オブジェクトを、当該死角領域の死角オブジェクトと関連付け、前記死角領域から出た固体オブジェクトの当該死角領域の死角オブジェクトとの関連付けを解除し、
前記リスク計算部は、前記死角オブジェクトに内包される種類毎の固体オブジェクトの密度によって前記潜在リスクを計算することを特徴とする電子制御装置。 - 請求項1に記載の電子制御装置であって、
前記死角オブジェクト管理部は、前記死角領域の形状と、前記死角領域の大きさと、前記死角領域を生成する前記障害オブジェクトと、前記死角領域に出入りする固体オブジェクトとをデータベースに登録して、前記死角オブジェクトを生成することを特徴とする電子制御装置。 - 請求項1に記載の電子制御装置であって、
地図に含まれる建築物の情報、及び前記物体認識部が認識した物体の形状の少なくとも一つを用いて、前記障害オブジェクトが占有する領域を除外した死角領域を計算する死角検知部を備えることを特徴とする電子制御装置。 - 請求項3に記載の電子制御装置であって、
前記死角オブジェクト管理部は、
前記死角領域の大きさ及び形状に基づいて、当該死角領域に内包される仮想固体オブジェクトを推定し、
前記推定された仮想固体オブジェクトを当該死角領域の死角オブジェクトと関連付けて管理することを特徴とする電子制御装置。 - 電子制御装置が観測したオブジェクトの管理方法であって、
前記電子制御装置は、プログラムを実行する演算装置と、前記演算装置がアクセス可能な記憶装置とを有し、
前記オブジェクトの管理方法は、
前記演算装置が、外界センサが取得した外界情報に基づいて、周囲の物体を認識する物体認識手順と、
前記演算装置が、前記認識された物体のうち、前記外界センサによる観測を遮蔽して死角領域を生成する物体に関する障害オブジェクトを生成する障害オブジェクト生成手順と、
前記演算装置が、前記障害オブジェクトが生成する死角領域を死角オブジェクトとして管理する死角オブジェクト管理手順と、
前記演算装置が、前記死角オブジェクトの情報を用いて、車両の走行危険度を示す潜在リスクを計算するリスク計算手順と、
前記演算装置が、前記認識された物体のうち、前記死角領域に出入り可能な物体に関する固体オブジェクト情報を生成する固体オブジェクト生成手順とを含み、
前記死角オブジェクト管理手順では、前記演算装置は、前記死角領域に入った固体オブジェクトを、当該死角領域の死角オブジェクトと関連付け、前記死角領域から出た固体オブジェクトの当該死角領域の死角オブジェクトとの関連付けを解除し、
前記リスク計算手順では、前記演算装置は、前記死角オブジェクトに内包される種類毎の固体オブジェクトの密度によって前記潜在リスクを計算することを特徴とするオブジェクトの管理方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021211927 | 2021-12-27 | ||
| JP2021211927 | 2021-12-27 | ||
| PCT/JP2022/028120 WO2023127186A1 (ja) | 2021-12-27 | 2022-07-19 | 電子制御装置、及びオブジェクトの管理方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2023127186A1 JPWO2023127186A1 (ja) | 2023-07-06 |
| JP7705960B2 true JP7705960B2 (ja) | 2025-07-10 |
Family
ID=86998537
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023570643A Active JP7705960B2 (ja) | 2021-12-27 | 2022-07-19 | 電子制御装置、及びオブジェクトの管理方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20250061807A1 (ja) |
| JP (1) | JP7705960B2 (ja) |
| DE (1) | DE112022005214T5 (ja) |
| WO (1) | WO2023127186A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7751127B2 (ja) * | 2022-09-26 | 2025-10-07 | 株式会社Subaru | 運転支援装置、車両、コンピュータプログラムを記録した記録媒体及び運転支援方法 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011248870A (ja) | 2010-04-27 | 2011-12-08 | Denso Corp | 死角領域検出装置、死角領域検出プログラム、および死角領域検出方法 |
| JP2013011939A (ja) | 2011-06-28 | 2013-01-17 | Mitsubishi Motors Corp | 運転支援装置 |
| JP2018101295A (ja) | 2016-12-20 | 2018-06-28 | トヨタ自動車株式会社 | 物体検知装置 |
| WO2018198186A1 (ja) | 2017-04-25 | 2018-11-01 | 日産自動車株式会社 | 走行支援方法及び走行支援装置 |
| WO2018216066A1 (ja) | 2017-05-22 | 2018-11-29 | 三菱電機株式会社 | 車載装置、走行支援方法および走行支援プログラム |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4572772B2 (ja) * | 2005-08-05 | 2010-11-04 | アイシン・エィ・ダブリュ株式会社 | 車両周辺監視装置 |
| JP5233432B2 (ja) * | 2008-06-16 | 2013-07-10 | アイシン・エィ・ダブリュ株式会社 | 運転支援システム、運転支援方法及び運転支援プログラム |
| JP5573617B2 (ja) * | 2010-11-12 | 2014-08-20 | トヨタ自動車株式会社 | 危険度算出装置 |
| JP6700623B2 (ja) * | 2016-10-07 | 2020-05-27 | アイシン・エィ・ダブリュ株式会社 | 走行支援装置及びコンピュータプログラム |
| KR102756198B1 (ko) * | 2018-10-08 | 2025-01-17 | 주식회사 에이치엘클레무브 | 초음파 센서를 이용한 후측방 사각 지대의 차량 위치 추적 방법 및 시스템 |
| JP7180436B2 (ja) | 2019-02-15 | 2022-11-30 | 株式会社デンソー | 行動制御方法、及び行動制御装置 |
| JP7145815B2 (ja) * | 2019-05-27 | 2022-10-03 | 日立Astemo株式会社 | 電子制御装置 |
| JP7565663B2 (ja) * | 2021-02-12 | 2024-10-11 | パナソニックオートモーティブシステムズ株式会社 | 車両、及び、制御装置 |
| JP7533372B2 (ja) * | 2021-06-17 | 2024-08-14 | トヨタ自動車株式会社 | 情報処理装置、情報処理方法、及びプログラム |
| JP7537391B2 (ja) * | 2021-07-20 | 2024-08-21 | トヨタ自動車株式会社 | 物体検出装置 |
| JP7602451B2 (ja) * | 2021-12-17 | 2024-12-18 | 株式会社日立製作所 | 自律体移動制御システム、制御装置、及び制御方法 |
| CN120573096A (zh) * | 2025-06-24 | 2025-09-02 | 上海擎剑汽车技术有限公司 | 基于车载摄像头的自动泊车方法、装置、设备及介质 |
-
2022
- 2022-07-19 JP JP2023570643A patent/JP7705960B2/ja active Active
- 2022-07-19 DE DE112022005214.7T patent/DE112022005214T5/de active Pending
- 2022-07-19 US US18/724,002 patent/US20250061807A1/en active Pending
- 2022-07-19 WO PCT/JP2022/028120 patent/WO2023127186A1/ja not_active Ceased
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011248870A (ja) | 2010-04-27 | 2011-12-08 | Denso Corp | 死角領域検出装置、死角領域検出プログラム、および死角領域検出方法 |
| JP2013011939A (ja) | 2011-06-28 | 2013-01-17 | Mitsubishi Motors Corp | 運転支援装置 |
| JP2018101295A (ja) | 2016-12-20 | 2018-06-28 | トヨタ自動車株式会社 | 物体検知装置 |
| WO2018198186A1 (ja) | 2017-04-25 | 2018-11-01 | 日産自動車株式会社 | 走行支援方法及び走行支援装置 |
| WO2018216066A1 (ja) | 2017-05-22 | 2018-11-29 | 三菱電機株式会社 | 車載装置、走行支援方法および走行支援プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| US20250061807A1 (en) | 2025-02-20 |
| WO2023127186A1 (ja) | 2023-07-06 |
| JPWO2023127186A1 (ja) | 2023-07-06 |
| DE112022005214T5 (de) | 2024-08-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN104802793B (zh) | 用于对行人在横穿车辆的行车道时的行为进行分类的方法和装置以及车辆的人员保护系统 | |
| JP6599986B2 (ja) | きめの細かい画像分類のためのハイパークラス拡張化および正則化深層学習 | |
| CN110001643A (zh) | 车辆控制装置、车辆控制方法、存储介质、以及信息获取装置 | |
| CN114426030B (zh) | 一种行人穿行意图估计方法、装置、设备和汽车 | |
| KR20190058520A (ko) | 자율 주행 차량 제어 시스템을 위한 위치에 따른 지원 | |
| JP2018152056A (ja) | 視界に制限のある交差点への接近のためのリスクベースの運転者支援 | |
| JP5587170B2 (ja) | 運転支援装置及びプログラム | |
| CN111204342B (zh) | 地图信息系统 | |
| JPWO2018002985A1 (ja) | 物体追跡方法及び物体追跡装置 | |
| JP2014203465A (ja) | 車線ベースの位置特定 | |
| CN113335311B (zh) | 一种车辆碰撞检测方法、装置、车辆及存储介质 | |
| US12567331B2 (en) | Systems and methods to manage tracking of objects through occluded regions | |
| CN113071521A (zh) | 无人驾驶车辆的控制方法及控制装置、无人驾驶车辆 | |
| US20240166204A1 (en) | Vehicle Collision Threat Assessment | |
| CN119058669A (zh) | 自主行驶车辆及其控制方法 | |
| CN113147788A (zh) | 园区物流车的控制方法及控制装置、无人驾驶车辆 | |
| CN113276885A (zh) | 无人驾驶车辆的控制方法及控制装置、无人驾驶车辆 | |
| JP7705960B2 (ja) | 電子制御装置、及びオブジェクトの管理方法 | |
| KR20260040391A (ko) | 본선 합류를 위해 우회전하는 것을 계획중인 자율 주행 차량의 행동 결정 방법, 장치 및 컴퓨터-판독가능 기록매체 | |
| US20240300486A1 (en) | Systems and Methods for Managing Tracks Within an Occluded Region | |
| CN120894939B (zh) | 车辆碰撞时间的确定方法、装置、电子设备及存储介质 | |
| CN118991816A (zh) | 对弱势道路使用者的对抗性行为的响应 | |
| KR102499023B1 (ko) | 차로 별 트래픽 흐름을 결정하는 장치 및 방법 | |
| KR102513382B1 (ko) | 보행자의 위치를 결정하는 방법 및 장치 | |
| US20240300487A1 (en) | Systems and Methods for Adjusting a Driving Path Using Occluded Regions |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240510 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20241203 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20250130 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20250311 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20250508 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20250603 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250630 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7705960 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |