JPWO2016121237A1 - インバータ制御装置及びモータ駆動システム - Google Patents
インバータ制御装置及びモータ駆動システム Download PDFInfo
- Publication number
- JPWO2016121237A1 JPWO2016121237A1 JP2016571799A JP2016571799A JPWO2016121237A1 JP WO2016121237 A1 JPWO2016121237 A1 JP WO2016121237A1 JP 2016571799 A JP2016571799 A JP 2016571799A JP 2016571799 A JP2016571799 A JP 2016571799A JP WO2016121237 A1 JPWO2016121237 A1 JP WO2016121237A1
- Authority
- JP
- Japan
- Prior art keywords
- voltage
- high frequency
- unit
- command
- control device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images










Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P27/00—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage
- H02P27/04—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage
- H02P27/047—V/F converter, wherein the voltage is controlled proportionally with the frequency
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/16—Circuit arrangements for detecting position
- H02P6/18—Circuit arrangements for detecting position without separate position detecting elements
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/14—Estimation or adaptation of machine parameters, e.g. flux, current or voltage
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/14—Estimation or adaptation of machine parameters, e.g. flux, current or voltage
- H02P21/18—Estimation of position or speed
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/22—Current control, e.g. using a current control loop
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/24—Vector control not involving the use of rotor position or rotor speed sensors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P27/00—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage
- H02P27/04—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage
- H02P27/06—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using DC to AC converters or inverters
- H02P27/08—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using DC to AC converters or inverters with pulse width modulation
- H02P27/085—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using DC to AC converters or inverters with pulse width modulation wherein the PWM mode is adapted on the running conditions of the motor, e.g. the switching frequency
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/16—Circuit arrangements for detecting position
- H02P6/18—Circuit arrangements for detecting position without separate position detecting elements
- H02P6/183—Circuit arrangements for detecting position without separate position detecting elements using an injected high frequency signal
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02M—APPARATUS FOR CONVERSION BETWEEN AC AND AC, BETWEEN AC AND DC, OR BETWEEN DC AND DC, AND FOR USE WITH MAINS OR SIMILAR POWER SUPPLY SYSTEMS; CONVERSION OF DC OR AC INPUT POWER INTO SURGE OUTPUT POWER; CONTROL OR REGULATION THEREOF
- H02M1/00—Details of apparatus for conversion
- H02M1/0003—Details of control, feedback or regulation circuits
- H02M1/0006—Arrangements for supplying an adequate voltage to the control circuit of converters
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02M—APPARATUS FOR CONVERSION BETWEEN AC AND AC, BETWEEN AC AND DC, OR BETWEEN DC AND DC, AND FOR USE WITH MAINS OR SIMILAR POWER SUPPLY SYSTEMS; CONVERSION OF DC OR AC INPUT POWER INTO SURGE OUTPUT POWER; CONTROL OR REGULATION THEREOF
- H02M1/00—Details of apparatus for conversion
- H02M1/0003—Details of control, feedback or regulation circuits
- H02M1/0009—Devices or circuits for detecting current in a converter
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P25/00—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details
- H02P25/02—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details characterised by the kind of motor
- H02P25/08—Reluctance motors
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Control Of Ac Motors In General (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
- Control Of Electric Motors In General (AREA)
Abstract
【課題】 モータの回転位相角を精度よく推定できるインバータ制御装置及びモータ駆動システムを提供する。【解決手段】 一実施形態に係るインバータ制御装置は、インバータ主回路と、電流指令生成部と、電圧指令生成部と、推定部と、高周波重畳部と、を備える。インバータ主回路は、所定の回転駆動対象と電気的に接続可能である。電流指令生成部は、電流指令を生成する。電圧指令生成部は、インバータ主回路から出力される電流が、電流指令と等しくなる電圧指令を生成する。推定部は、回転駆動対象の推定回転位相角を算出する。高周波重畳部は、回転駆動対象の特徴量と閾値との関係に応じて、電流指令又は電圧指令に、高周波を重畳する。
Description
本発明の実施形態は、インバータ制御装置に関する。
従来、永久磁石同期モータ(PMSM)やシンクロナスリラクタンスモータ(SynRM)の回転位相角センサレス制御において、高速域では誘起電圧を利用した回転位相角の推定方法が利用されている。しかしながら、磁石磁束が小さいPMSMや、SynRMでは、高速域であっても、低負荷の状態では、鎖交磁束により生じる誘起電圧が小さいため、回転位相角の推定精度が悪化するという問題があった。
モータの回転位相角を精度よく推定できるインバータ制御装置及びモータ駆動システムを提供する。
一実施形態に係るインバータ制御装置は、インバータ主回路と、電流指令生成部と、電圧指令生成部と、推定部と、高周波重畳部と、を備える。インバータ主回路は、所定の回転駆動対象と電気的に接続可能である。電流指令生成部は、電流指令を生成する。電圧指令生成部は、インバータ主回路から出力される電流が、電流指令と等しくなる電圧指令を生成する。推定部は、回転駆動対象の推定回転位相角を算出する。高周波重畳部は、回転駆動対象の特徴量と閾値との関係に応じて、電流指令又は電圧指令に、高周波を重畳する。
以下、本発明の実施形態について図面を参照して説明する。
(第1実施形態)
第1実施形態に係るインバータ制御装置について、図1〜図21を参照して説明する。図1は、本実施形態に係るモータ駆動システムの構成を示す図である。図1に示すように、本実施形態に係るモータ駆動システムは、モータ1と、インバータ制御装置2(以下、「制御装置2」という)と、を備える。
第1実施形態に係るインバータ制御装置について、図1〜図21を参照して説明する。図1は、本実施形態に係るモータ駆動システムの構成を示す図である。図1に示すように、本実施形態に係るモータ駆動システムは、モータ1と、インバータ制御装置2(以下、「制御装置2」という)と、を備える。
モータ1は、制御装置2の回転駆動対象であり、制御装置2に接続される。以下では、モータ1がシンクロナスリラクタンスモータ(以下、「SynRM1」という)である場合を例として説明する。SynRM1は、固定子と、回転子と、を備える。固定子は、3つの励磁相(U相、V相、及びW相)を有する。固定子は、各励磁相に流れる3相交流電流によって磁界を発生させる。回転子は、永久磁石を有さず、固定子が発生させた磁界との磁気的相互作用により回転する。
制御装置2は、SynRM1の回転位相角θを、回転位相センサレスで制御する。図1に示すように、本実施形態に係る制御装置2は、インバータ主回路21と、電流検出器22と、座標変換部23と、電流指令生成部24と、電圧指令生成部25と、座標変換部26と、PWM変調部27と、速度・回転位相角推定部28と、加算器29と、高周波重畳部30と、を備える。
インバータ主回路21は、スイッチング素子を備える回路である。インバータ主回路21は、スイッチング素子のON/OFFを切替えることにより、電源(図示省略)からの電力を交流に変換して、SynRM1に供給する。インバータ主回路21は、各スイッチング素子のON/OFFを制御する制御信号をPWM変調部27から入力される。
電流検出器22は、SynRM1の固定子に流れる3相交流電流のうち、2相又は3相の電流を検出する。図1は、2相(U相及びW相)の電流iu,iwを検出する構成を示している。尚、SynRM1の固定子に流れる3相交流電流は、インバータ主回路21の直流側電流に基づき演算により求めてもよい。
座標変換部23は、電流検出器22が検出した電流iu,iwを、三相固定座標系からdcqc軸回転座標系に座標変換し、電流idc,iqcを生成する。電流idcは、固定子に流れる電流のdc軸成分であり、電流iqcは、固定子に流れる電流のqc軸成分である。ここで、三相固定座標系及びdcqc軸回転座標系について、図2を参照して説明する。
図2に示すように、三相固定座標系は、α軸とβ軸とからなる固定座標系である。図2において、α軸は、U相方向に設定され、β軸は、α軸と垂直な方向に設定されている。電流検出器22により検出された電流iu,iwは、このような三相固定座標上で表される。
これに対して、dcqc軸回転座標系は、dc軸とqc軸とからなる回転座標系である。dc軸は、制御装置2がd軸方向(回転子のインダクタンスが最小の方向)と推定した方向に設定され、qc軸は、制御装置2がq軸方向(回転子のインダクタンスが最大の方向)と推定した方向に設定される。図2のインダクタンス楕円は、回転子のインダクタンスを示している。
図2に示すように、dcqc軸と、dq軸と、は必ずしも一致するとは限らない。回転子の実際の回転位相角θは、α軸からd軸までの角度で表される。また、制御装置2が推定した回転子の推定回転位相角θestは、α軸からdc軸までの角度で表される。以下では、回転位相角θと推定回転位相角θestとの誤差を、誤差Δθという。
座標変換部23は、速度・回転位相角推定部28が出力した推定回転位相角θestを用いることにより、三相固定座標系をdcqc軸回転座標系に変換することができる。
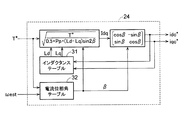
電流指令生成部24は、トルク指令T*及び推定速度ωestに基づいて、電流指令idc*,iqc*を生成する。トルク指令T*とは、回転子に発生させるトルク値である。本実施形態では、トルク指令T*は、外部装置から入力されるものとする。推定速度ωestとは、制御装置2が推定した回転子の速度ωのことである。電流指令idc*とは、SynRM1に流す電流のdc軸成分である。電流指令iqc*とは、SynRM1に流す電流のqc軸成分である。
ここで、図3は、電流指令生成部24の構成を示す図である。図3に示すように、電流指令生成部24は、インダクタンステーブル31と、電流位相角テーブル32と、を備える。
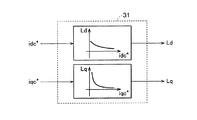
インダクタンステーブル31は、電流指令とインダクタンスとの関係を示すテーブルである。インダクタンステーブル31には、図4に示すように、電流指令idc*とインダクタンスLdとの関係を示すテーブルと、電流指令iqc*とインダクタンスLqとの関係を示すテーブルと、が含まれる。インダクタンスLdは、SynRM1のインダクタンスのd軸成分であり、インダクタンスLqは、SynRM1のインダクタンスのq軸成分である。インダクタンステーブル31は、電流指令idc*,iqc*をフィードバックされ、電流指令idc*,iqc*に応じたインダクタンスLd,Lqをそれぞれ出力してもよい。
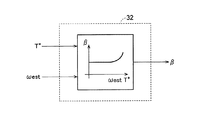
電流位相角テーブル32は、図5に示すように、トルク指令T*及び推定角速度ω*と、電流位相角βと、の関係を示すテーブルである。電流位相角βは、固定子に流れる電流に対応する電流ベクトルの位相角である。電流位相角テーブル32は、トルク指令T*及び推定速度ω*を入力され、トルク指令T*及び推定角速度ω*に応じた電流位相角βを出力する。
まず、電流指令生成部24は、トルク指令T*、インダクタンスLd,Lq、及び電流位相角βに基づいて、電流Idqを算出する。電流Idqは、固定子に流れる電流の大きさである。電流Idqは、以下の式により算出される。

式(1)において、Pは、SynRM1の極対数である。
次に、電流指令生成部24は、電流Idqと、電流位相角βと、から電流指令idc*,iqc*を生成する。電流指令idc*は、大きさが電流Idqかつ位相角が電流位相角βの電流ベクトルのdc軸成分となる。また、電流指令iqc*は、大きさが電流Idqかつ位相角が電流位相角βの電流ベクトルのqc軸成分となる。
なお、電流指令idc*,iqc*の算出方法は、上記の方法に限られず、任意に選択可能である。
電圧指令生成部25(電流制御部)は、電流idc,iqc、電流指令idc*,iqc*、及び推定速度ωestに基づいて、インバータ主回路21から出力される電流(すなわち、SynRM1に流れる電流)が電流指令idc*,iqc*となるように、電圧指令vdc*,vqc*を生成する。電圧指令vdc*は、SynRM1の固定子に印加する電圧のdc軸成分である。電圧指令vqc*は、SynRM1の固定子に印加する電圧のqc軸成分である。
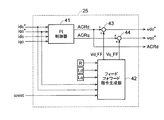
図6は、電圧指令生成部25の構成を示す図である。図6に示すように、電圧指令生成部25は、PI制御器41と、フィードフォワード指令生成部42と、加算器43,44と、を備える。
PI制御器41は、電流idc,iqc及び電流指令idc*,iqc*を入力され、PI制御により、電流idc,iqcが電流指令idc*,iqc*となる電圧ACRd,ACRqを算出する。電圧ACRd,ACRqは、誤差Δθに応じて生成される電圧であり、設定したモータパラメータが真値と一致し、なおかつ誤差Δθが0の場合、いずれも0となる。PI制御器41が出力した電圧ACRd,ACRqは、加算器43,44にそれぞれ入力される。
フィードフォワード指令生成部42は、電流指令idc*,iqc*と、推定速度ωestと、を入力され、フィードフォワード電圧Vd_FF,Vq_FFを生成する。フィードフォワード電圧Vd_FF,Vq_FFは、例えば、以下の式により算出される。
式(2)において、Rは固定子の巻線抵抗である。フィードフォワード指令生成部42が出力したフィードフォワード電圧Vd_FF,Vq_FFは、加算器43,44にそれぞれ入力される。
加算器43は、電圧ACRd及びフィードフォワード電圧Vd_FFを加算し、電圧指令vdc*を生成する。加算器44は、電圧ACRq及びフィードフォワード電圧Vq_FFを加算し、電圧指令vdq*を生成する。
座標変換部26は、電圧指令生成部25が出力した電圧指令vdc*及び加算器29が出力した電圧を、dcqc軸回転座標系から三相固定座標系に座標変換する。座標変換部26は、座標変換部23と同様、推定回転位相角θestを用いることにより、dcqc軸回転座標系を三相固定座標系に変換する。
以下では、座標変換部26が座標変換した電圧を電圧指令vu*,vv*,vw*という。電圧指令vu*は、固定子のU相に印加する電圧であり、電圧指令vv*は、固定子のV相に印加する電圧であり、電圧指令vw*は、固定子のW相に印加する電圧である。
PWM変調部27は、電圧指令vu*,vv*,vw*を、三角波を用いたPWM(Pulse-Width Modulation)によって変調し、インバータ主回路21の各スイッチング素子のON又はOFFに対応した2値の制御信号を生成する。PWM変調部27は、生成した制御信号をインバータ主回路21に入力する。
速度・回転位相角推定部28(以下、「推定部28」という)は、電圧指令vdc*,vqc*及び電流idc,iqcに基づいて、SynRM1の回転子の速度ω及び回転位相角θを推定し、推定速度ωest及び推定回転位相角θestを算出する。推定部28が出力した推定速度ωestは、電流指令生成部24、電圧指令生成部25、及び高周波重畳部30に入力される。また、推定回転位相角θestは、座標変換部23,26に入力され、座標変換に利用される。
本実施形態に係る推定部28は、拡張誘起電圧を用いて速度ω及び回転位相角θを推定する。以下で、拡張誘起電圧を用いた推定方法について説明する。
回転位相角θと推定回転位相角θestとの誤差Δθが0である場合、すなわち、dq軸とdcdq軸とが一致する場合、以下の電圧方程式が成り立つ。
式(3)において、vdはSynRM1に印加される電圧のd軸成分、vqはSynRM1に印加される電圧のq軸成分、idはSynRM1に流れる電流のd軸成分、iqはSynRM1に流れる電流のq軸成分、pは微分演算子(d/dt)である。
これに対して、誤差Δθが生じ、dq軸とdcdq軸とがずれている場合、以下の電圧方程式が成り立つ。
式(4)において、vdcはSynRM1に印加される電圧のdc軸成分であり、vqcはSynRM1に印加される電圧のqc軸成分である。
式(4)〜(8)より、式(4)の各項に含まれるインダクタンスは、誤差Δθに依存して変化する。このため、Δθを式(3),(4)から直接求めることは難しい。そこで、式(3)を、拡張誘起電圧表現に書き換えると、式(3)は以下のように表される。
同様に、式(4)〜(8)を、拡張誘起電圧表現に書き換えると、以下のように表される。
上記の式(12)で表される電圧Exを、拡張誘起電圧という。
ここで、式(10)を変形すると以下のようになる。
式(11)と式(13)とは等しいので、以下の式が成り立つ。
式(14)の各項を除算すると、以下の式が成り立つ。
さらに、式(15)の逆正接をとると、以下のようになる。
推定部28は、式(16)に基づいて、誤差Δθを算出し、誤差Δθが0となるようにPLL制御を行うことで、速度ωを推定し、推定速度ωestを算出することができる。また、推定速度ωestを積分することで、回転位相角θを推定し、推定回転位相角θestを算出することができる。
図7は、上記の方法で速度ω及び回転位相角θを推定する推定部28の構成を示す図である。図7に示すように、推定部28は、高周波検出部51と、Δθ算出部52と、PLL制御部53と、積分器54と、を備える。
高周波検出部51は、電流idc,iqcの高周波成分を検出し、電流微分項pidc,piqcを算出する。高周波検出部51が出力した電流微分項pidc,piqcは、Δθ算出部52に入力される。Δθ算出部52が算出した誤差Δθは、PLL制御部53に入力される。なお、高周波検出部51の詳細は後述する。
PLL制御部53は、誤差Δθが0になるようにPLL制御を行い、推定速度ωestを算出する。PLL制御部53が出力した推定速度ωestは、積分器54に入力される。
積分器54は、推定速度ωestを積分し、推定回転位相角θestを算出する。
加算器29は、電圧指令生成部25が出力した電圧指令vdc*と、高周波重畳部30が出力した高周波電圧vhと、を加算する。これにより、電圧指令vdc*に高周波電圧vhが重畳される。高周波電圧vhを重畳された電圧指令vdc*は、座標変換部26に入力される。
高周波重畳部30は、SynRM1の電圧振幅指令Vdqc*又はパワーPmが閾値を下回る場合、高周波電圧vhを出力する。ここでいう電圧振幅指令Vdqc*とは、電圧指令vdc*,vqc*により設定されるSynRM1の端子電圧のことであり、Vdqc*=(vdc*2+vdc*2)1/2となる。また、パワーPmとは、SynRM1の定格出力(軸出力)のことである。出力された高周波電圧vhは、加算器29により電圧指令vdc*に重畳される。以下で、電圧指令vdc*に高周波電圧vhを重畳する理由を説明する。
上述の通り、推定部28は、拡張誘起電圧Exを用いて誤差Δθを算出し、速度ω及び回転位相角θを推定する。しかしながら、SynRM1の負荷が小さい場合、式(12)の拡張誘起電圧Exは小さくなる。
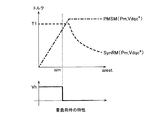
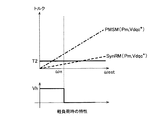
ここで、図8及び図9は、従来のPMSM及びSynRMの速度に対するトルク、パワーPm、及び電圧振幅指令Vdqc*の特性を示す図である。図8は、各モータが大きなトルクを出力する重負荷時の特性を示す。図9は、各モータが小さなトルクを出力する軽負荷時の特性を示す。
図8に示すように、従来のPMSM及びSynRMは、重負荷時には十分な拡張誘起電圧Exが得られる。このため、PMSM及びSynRMを制御する制御装置は、ある速度ωnを基準として、電圧指令vdc*に対する高周波電圧vhの重畳を停止したとしても、PMSM及びSynRMを脱調させることなく、安定した制御を継続することができる。
また、図9に示すように、従来のPMSMは、軽負荷時においても、回転速度に応じた磁石電圧が発生するため、比較的大きな拡張誘起電圧Exが得られる。このため、PMSMを制御する制御装置は、ある速度ωnを基準として、電圧指令vdc*に対する高周波電圧vhの重畳を停止したとしても、PMSMを脱調させることなく制御することができる。
これに対して、図9に示すように、従来のSynRMは、軽負荷時に拡張誘起電圧Exが小さくなる。これは、上述の通りである。このため、SynRMを制御する制御装置は、ある速度ωnを基準として、電圧指令vdc*に対する高周波電圧vhの重畳を停止すると、回転位相の推定が困難となり、SynRMの脱調や、制御の不安定化を招く恐れがある。
そこで、本実施形態に係る制御装置2は、図10に示すように、SynRM1の電圧振幅指令Vdqc*又はパワーPmが閾値を下回る場合に、電圧指令vdc*に高周波電圧vhを重畳することにより、拡張誘起電圧Exを大きくし、SynRM1の制御を安定化させる。高周波電圧vhを重畳すると、式(4)のdc軸の電流微分項は、Δθが極めて小さい場合以下のようになる。
また、電流Idqが小さい場合、式(12)の拡張誘起電圧Exは、以下のようになる。
式(17)及び式(18)より、拡張誘起電圧Exは以下のようになる。
式(19)より、高周波電圧vhを重畳することにより、拡張誘起電圧Exが大きくなることがわかる。したがって、拡張誘起電圧Exを用いて回転位相角θを推定することができる。このとき、誤差Δθは、以下の式で表される。
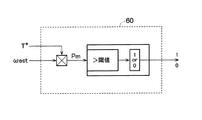
ここで、図11は、高周波重畳部30の構成の一例を示す図である。図11の高周波重畳部30は、SynRM1のパワーPmに基づいて、高周波重畳の有無を切り替える。図11に示すように、高周波重畳部30は、判定部60を備える。
判定部60は、SynRM1のパワーPmに基づいて、高周波電圧vhを重畳するか否かを判定する。判定部60は、判定結果に応じた信号を出力する。以下では、判定部60は、拡張誘起電圧Exが大きいと判定した場合に0を出力し、拡張誘起電圧Exが小さいと判定した場合に1を出力するものとする。
高周波重畳部30は、判定部60が、拡張誘起電圧Exは大きいと判定した(0を出力した)場合、高周波電圧vhを出力しない。この場合、座標変換部26には、電圧指令vdc*が入力される。
これに対して、高周波重畳部30は、判定部60が、負荷は小さいと判定した(1を出力した)場合、高周波電圧vhを出力する。この場合、座標変換部26には、加算器29により高周波電圧vhを加算された電圧指令vdc*が入力される。なお、高周波電圧vhは、以下の式で表される。
式(20)において、Vhは振幅の設定値、fhは周波数の設定値である。
図12は、図11の判定部60の一例を示す図である。この判定部60は、上述の通り、SynRM1のパワーPmに基づいて、高周波重畳が必要か否か判定する。具体的には、判定部60は、トルク指令T*及び推定速度ωestに基づいて、SynRM1のパワーPmを算出し、パワーPmと所定の閾値Prとを比較する。判定部60は、パワーPmが閾値Prより小さい場合(Pm<Pr)、負荷が小さいと判定する。
閾値Prは、速度ω及び回転位相角θの推定精度が向上するように設定される。例えば、拡張誘起電圧Exを用いて回転位相角θを精度よく推定できる最低値をnとすると、モータ極対数を1とした場合の閾値Prに対応する拡張誘起電圧Exは以下の式で表される。
また、SynRM1のパワーPmは以下の式で表される。
したがって、式(22),(23)より、回転位相角θを精度よく推定できる拡張誘起電圧最低値nを満たす閾値Prは、以下のようになる。
判定部60は、式(24)を満たす閾値Prを逐次、或いは事前に算出し、パワーPmと比較すればよい。これにより、パワーPmが閾値Prより小さい場合に、高周波電圧vhが電圧指令vdc*に重畳される。
なお、パワーPmは、式(23)以外の代わりに、下記の数式を用いて演算してもよい。
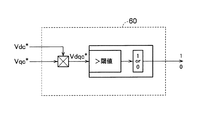
また、高周波重畳部30は、SynRM1の電圧振幅指令Vdqc*に基づいて、高周波重畳の有無を切り替えてもよい。この場合、高周波重畳部30には、トルク指令T*及び推定速度ωestの代わりに、電圧指令vdc*,vqc*が入力される。
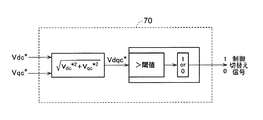
そして、図13に示すように、判定部60は、電圧指令vdc*,vqc*に基づいてSynRM1の電圧振幅指令Vdqc*を算出し、電圧振幅指令Vdqc*と閾値Vrとを比較し、Vdqc*<Vrの場合に負荷が小さいと判定してもよい。これにより、電圧振幅指令Vdqc*が閾値Vrより小さい場合に、高周波電圧vhが電圧指令vqc*に重畳される。
このように、負荷が小さい場合に、高周波重畳部30が高周波電圧vhを電圧指令vdc*に重畳することにより、拡張誘起電圧Exを大きくし、拡張誘起電圧Exを用いた速度ω及び回転位相角θの推定精度を向上させることができる。
ここで、推定部28の高周波検出部51の詳細について説明する。上述の通り、高周波重畳部30は、SynRM1の負荷が小さい場合、電圧指令vqc*に高周波電圧vhを重畳する。推定部28は、高周波電圧vhが重畳されていない場合、式(16)により誤差Δθを算出し、高周波電圧vhが重畳されている場合、式(20)により誤差Δθを算出する。
式(20)からわかるように、高周波電圧vhが重畳された場合、誤差Δθを算出するために、電流微分項pidc,piqcが必要となる。高周波検出部51は、この電流微分項pidc,piqcを算出する。推定部28は、高周波検出部51が算出した電流微分項pidc,piqcを式(20)に代入して、誤差Δθを算出する。
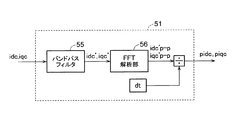
図14は、高周波検出部51の構成を示す図である。図14に示すように、高周波検出部51は、バンドパスフィルタ55と、FFT解析部56と、を備える。
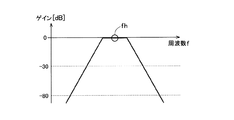
バンドパスフィルタ55は、図15に示すように、入力された電流idc,iqcのうち、高周波電圧vhの周波数fhを含む所定の範囲の周波数成分を通過させ、範囲外の周波数成分を減衰させる。これにより、バンドパスフィルタ55は、電流idc,idqから、周波数fhを有する高周波電流idc′,iqc′を検出する。バンドパスフィルタ55が出力した高周波電流idc′,iqc′は、FFT解析部56に入力される。
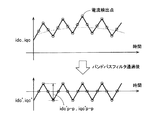
FFT解析部56は、バンドパスフィルタ55が検出した高周波電流idc′,iqc′の振幅idc′p−p,iqc′p−pをそれぞれ算出する。FFT解析部56は、例えば、図16に示すように、高周波電流idc′,iqc′に対して、高周波電圧vhの1周期(=1/fh)中に4回サンプリングを行い、サンプリングされた4つの電流値から振幅idc′p−p,iqc′p−pをそれぞれ算出する。
高周波電流idc′,iqc′は、バンドパスフィルタ55によって余計な周波数成分を除去されている。このため、FFT解析部56は、図17に示すように、振幅idc′p−p,iqc′p−pを精度よく算出することができる。
高周波検出部51は、FFT解析部56により算出した振幅idc′p−p,iqc′p−pを、サンプリング期間dtでそれぞれ除算することにより、電流微分項pidc,piqcを算出する。
以上説明した通り、本実施形態に係るインバータ制御装置2は、SynRM1の負荷が低い場合、電圧指令vqc*に高周波電圧vhを重畳する。これにより、SynRM1の負荷が低く、鎖交磁束により生じる誘起電圧が小さい場合であっても、拡張誘起電圧Exを大きくし、拡張誘起電圧Exを用いてSynRM1の回転位相角θ及び速度ωを精度よく推定することができる。したがって、SynRM1の制御の不安定化や脱調を抑制することができる。
なお、以上の説明では、インバータ制御装置2がSynRM1の動作を制御する場合について説明したが、このインバータ制御装置2は、PMSMや、界磁磁束を二次巻線にて供給する巻線界磁式同期機の制御装置として利用することも可能である。
また、インバータ制御装置2は、高周波電圧vhを電圧指令vqc*に重畳してもよいし、高周波電流を電流指令idc*,iqc*に重畳してもよい。いずれの場合も、拡張誘起電圧Exを大きくすることができるため、上述の効果が得られる。
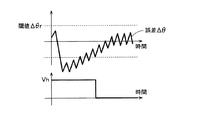
また、高周波重畳部30は、SynRM1の回転位相角の誤差Δθに基づいて、高周波重畳の有無を切り替えてもよい。この場合、高周波重畳部30には、トルク指令T*及び推定速度ωestの代わりに、推定部28が算出した誤差Δθが入力される。
そして、判定部60は、誤差Δθと閾値Δθrとを比較し、|Δθ|>Δθrの場合に負荷が小さいと判定してもよい。これにより、図18に示すように、誤差Δθが閾値Δθrより大きい場合に、高周波電圧vhが電圧指令vqc*に重畳される。
センサレス制御においては、回転位相角の誤差Δθは、ゼロに近づくように制御されており、誤差Δθが閾値を超える場合に高周波重畳することで、位相角誤差をゼロへ収束しやすくすることができ、SynRM1の制御の不安定化や脱調を抑制することができる。
また、インバータ制御装置2は、拡張誘起電圧Exを用いたセンサレス制御に限らず、オブザーバやPWM高調波を用いたセンサレス制御に適用することも可能である。
また、インバータ制御装置2は、電流検出器22を備えず、電流センサレスでSynRM1を制御してもよい。この場合も、同様の効果が得られる。
(第1実施形態の変形例)
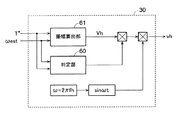
次に、第1実施形態に係る高周波重畳部30の変形例について、図19〜図21を参照して説明する。この高周波重畳部30は、SynRM1の負荷に応じて、重畳する高周波電圧vhの振幅Vhを変化させる。図19は、この高周波重畳部30の構成を示す図である。図19に示すように、高周波重畳部30は、振幅算出部61を更に備える。
次に、第1実施形態に係る高周波重畳部30の変形例について、図19〜図21を参照して説明する。この高周波重畳部30は、SynRM1の負荷に応じて、重畳する高周波電圧vhの振幅Vhを変化させる。図19は、この高周波重畳部30の構成を示す図である。図19に示すように、高周波重畳部30は、振幅算出部61を更に備える。
振幅算出部61は、SynRM1のパワーPm又は電圧振幅指令Vdqc*に基づいて、高周波電圧vhの振幅Vhを算出する。振幅算出部61は、SynRM1のパワーPm又は電圧振幅指令Vdqc*が小さいほど、振幅Vhが大きくなるように算出する。
例えば、判定部60がSynRM1のパワーPmを用いて判定を行う場合、図19に示すように、振幅算出部61は、トルク指令T*及び推定速度ωestに基づいて、以下の式により振幅Vhを算出する。
これにより、図20に示すように、振幅Vhは、パワーPmが小さい程大きくなる。振幅Vhの値は、式(24)の関係を満たすように決定すればよい。
また、電圧振幅指令Vdqc*を用いて高周波電圧vhの振幅Vhを変更する場合、振幅算出部61は、以下の式により振幅Vhを算出してもよい。
これにより、振幅Vhは、一定の電流を通電している場合は、電圧振幅指令Vdqc*に依存せずに、速度ωに反比例して減少し、図21に示すような特性となる。
このような構成により、インバータ制御装置2は、速度ωや拡張誘起電圧Exの関係を用いて重畳する高周波電圧vhを可変することが可能となる。
なお、この高周波重畳部30は、SynRM1の負荷に応じて高周波電流vhの周波数fhを変更させてもよい。また、高周波重畳部30は、パワーPmや電圧振幅指令Vdqc*に限らず、推定速度ωestやトルク指令T*に応じて、振幅Vhを変化させてもよい。
(第2実施形態)
次に、第2実施形態に係るインバータ制御装置2について、図22〜図26を参照して説明する。本実施形態に係るインバータ制御装置2は、回転位相角θ及び速度ωの推定方法を2種類利用し、SynRM1の負荷に応じて、これらの推定方法を切替える。
次に、第2実施形態に係るインバータ制御装置2について、図22〜図26を参照して説明する。本実施形態に係るインバータ制御装置2は、回転位相角θ及び速度ωの推定方法を2種類利用し、SynRM1の負荷に応じて、これらの推定方法を切替える。
図22は本実施形態に係るモータ駆動システムの構成を示す図である。図22に示すように、本実施形態に係るインバータ制御装置2は、制御方式切替え部70を更に備える。以下、第1実施形態との相違点について説明する。
電圧指令生成部25は、図23に示すように、電圧指令vdc*,vqc*と共に、電圧ACRdを出力する。電圧指令生成部25が出力した電圧ACRdは、推定部28に入力される。
制御方式切替え部70は、SynRM1の電圧振幅指令Vdqc*又はパワーPmに応じて2値の制御切替え信号を出力する。本実施形態では、この制御切替え信号によって、回転位相角θ及び速度ωの推定方法などの制御方式が切替えられる。以下では、制御方式切替え部70は、電圧振幅指令Vdqc*又はパワーPmが小さい場合に0を出力し、電圧振幅指令Vdqc*又はパワーPmが大きい場合に1を出力するものとする。
制御方式切替え部70は、図24に示すように、電圧指令vdc*,vqc*に基づいてSynRM1の電圧振幅指令Vdqc*を算出し、電圧振幅指令Vdqc*と閾値Vrとを比較し、Vdqc*<Vrの場合に負荷が小さいと判定してもよい。
また、制御方式切替え部70は、トルク指令T*及び推定速度ωestに基づいて、SynRM1のパワーPmを算出し、パワーPmと所定の閾値Prとを比較し、Pm<Prの場合に負荷が小さいと判定してもよい。
さらに、制御方式切替え部70は、推定速度ωestと所定の閾値ωrとを比較し、ωest<ωrの場合に高周波電圧vhを重畳する必要があると判定してもよい。
高周波重畳部30は、制御方式切替え部70から制御切替え信号を入力される。高周波重畳部30は、制御切替え信号として0を入力された場合、高周波電圧vhを出力し、制御切替え信号として1を入力された場合、高周波電圧vhを出力しない。高周波重畳部30が出力した高周波電圧vhは、推定部28及び加算器29に入力される。
加算器29は、電圧指令vdc*と高周波電圧vhとを加算し、座標変換部26に入力する。これにより、高周波電圧vhが電圧指令vdc*に重畳される。
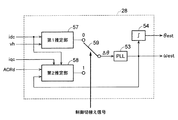
推定部28は、図25に示すように、PLL制御部53と、積分器54と、第1推定部57と、第2推定部58と、スイッチ59と、を備える。第1推定部57及び第2推定部58は、それぞれ異なる方法で誤差Δθを算出する。
第1推定部57は、高周波電圧vhと電流idcとに基づいて、誤差Δθを算出する。電圧指令vdc*に高周波電圧vhが重畳された場合、電流微分項pidcは以下の式で表される。
誤差Δθが十分に小さい場合、式(28)より、誤差Δθは以下の式で表される。
第1推定部57は、式(29)に基づいて、誤差Δθを算出する。
第2推定部58は、PI制御器41が出力した電圧ACRdと、フィードフォワード電圧Vd_FF,Vq_FFと、の関係を用いて誤差Δθを算出する。具体的には、第2推定部58は、電流idc,iqc及び電圧ACRdに基づいて、誤差Δθを算出する。
誤差Δθが生じる場合、式(2)より、フィードフォワード電圧Vd_FF,Vq_FFは、以下の式で表される。
ここで、式(30)のdc軸成分に着目すると、以下の式が成り立つ。
誤差Δθが十分に小さい場合、式(31)より、誤差Δθは以下の式で表される。
第2推定部58は、式(32)に基づいて、誤差Δθを算出する。
スイッチ59は、PLL制御部53に入力される誤差Δθを、制御切替え信号に応じて切替える。スイッチ59は、制御切替え信号として0を入力された場合、第1推定部57が出力した誤差ΔθをPLL制御部53に入力する。スイッチ59は、制御切替え信号として1を入力された場合、第1推定部58が出力した誤差ΔθをPLL制御部53に入力する。
PLL制御部53は、誤差Δθに対してPLL制御を行い、推定速度ωestを算出する。積分器54は、推定速度ωestを積分し、推定回転位相角θestを算出する。
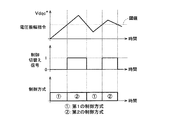
以上説明した通り、本実施形態に係るインバータ制御装置2は、図26に示すように、高周波電圧vhを重畳することで発生する高調波電流を用いて回転位相を推定する第1の制御方式と、鎖交磁束による電圧を用いて回転位相を推定する第2の制御方式と、の2種類の制御方式を用いてSynRM1を制御する。
第1の制御方式では、インバータ制御装置2は、電圧指令vdc*に高周波電圧vhを重畳し、高周波電圧vhが重畳された電圧指令vdc*に基づいて誤差Δθを算出し、この誤差Δに基づいて回転位相角θ及び速度ωを推定する。これにより、インバータ制御装置2は、拡張誘起電圧Exを大きくし、回転位相角θ及び速度ωの推定精度を向上させることができる。
また、第2の制御方式では、インバータ制御装置2は、電圧指令vdc*に高周波電圧vhを重畳せずに、回転位相角θ及び速度ωを推定する。これにより、インバータ制御装置2は、トルクリプルやそれに起因した騒音、ノイズ、及び高周波損失を低減することができる。
なお、第2推定部58による誤差Δθの算出方法として、高周波電圧vhを用いない任意の方法を選択することができる。例えば、第2推定部58は、オブザーバや電圧ACRd,ACRqを用いて誤差Δθを算出してもよい。
また、制御方式切替え部70は、ヒステリシス動作により、制御切替え信号が頻繁に変更されないように構成されてもよい。
なお、本発明は上記各実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記各実施形態に開示されている複数の構成要素を適宜組み合わせることによって種々の発明を形成できる。また例えば、各実施形態に示される全構成要素からいくつかの構成要素を削除した構成も考えられる。さらに、異なる実施形態に記載した構成要素を適宜組み合わせてもよい。
1:モータ(SynRM)、2:インバータ制御装置、21:インバータ主回路、22:電流検出器、23:座標変換部、24:電流指令生成部、25:電圧指令生成部、26:座標変換部、27:PWM変調器、28:速度・回転位相角推定部、29:加算器、30:高周波重畳部、31:インダクタンステーブル、32:電流位相角テーブル、41:PI制御器、42:フィードフォワード指令生成部、43,44:加算器、51:高周波検出部、52:Δθ算出部、53:PLL制御部、54:積分器、55:バンドパスフィルタ、56:FFT解析部、57:第1推定部、58:第2推定部、59:スイッチ、60:判定部、61:振幅算出部、70:制御方式切替え部
Claims (12)
- 所定の回転駆動対象と電気的に接続可能なインバータ主回路と、
電流指令を生成する電流指令生成部と、
前記インバータ主回路から出力される電流が、前記電流指令と等しくなる電圧指令を生成する電圧指令生成部と、
前記回転駆動対象の推定回転位相角を算出する推定部と、
前記回転駆動対象の特徴量と閾値との関係に応じて、前記電流指令又は前記電圧指令に高周波を重畳する高周波重畳部と、
を備えるインバータ制御装置。 - 前記特徴量は、前記回転駆動対象のパワーである
請求項1に記載のインバータ制御装置。 - 前記特徴量は、前記回転駆動対象への電圧振幅指令である
請求項1に記載のインバータ制御装置。 - 前記高周波重畳部は、前記パワーが所定の閾値より小さいとき、前記高周波を重畳する
請求項2に記載のインバータ制御装置。 - 前記高周波重畳部は、前記電圧振幅指令が所定の閾値より小さいとき、前記高周波を重畳する
請求項3に記載のインバータ制御装置。 - 前記高周波重畳部は、前記推定回転位相角の誤差が所定の閾値より大きいとき、前記高周波を重畳する
請求項1乃至請求項5のいずれか1項に記載のインバータ制御装置。 - 前記高周波重畳部は、前記特徴量の大きさに応じて、前記高周波の振幅を変化させる
請求項1乃至請求項6のいずれか1項に記載のインバータ制御装置。 - 前記推定部は、拡張誘起電圧を用いて前記推定回転位相角を算出する
請求項1乃至請求項7のいずれか1項に記載のインバータ制御装置。 - 前記推定部は、
前記高周波に基づいて前記推定回転位相角を算出する第1推定部と、
前記第1推定部と異なる方法で前記推定回転位相角を算出する第2推定部と、
を備える請求項1乃至請求項8のいずれか1項に記載のインバータ制御装置。 - 前記回転駆動対象のパワーが所定の閾値より小さいとき、前記第1推定部が算出した前記推定回転位相角を用いて制御する
請求項9に記載のインバータ制御装置。 - 前記回転駆動対象への電圧振幅指令が所定の閾値より小さいとき、前記第1推定部が算出した前記推定回転位相角を用いて制御する
請求項9に記載のインバータ制御装置。 - モータと、
前記モータに接続されるインバータ主回路と、
電流指令を生成する電流指令生成部と、
前記インバータ主回路から出力される電流が、前記電流指令と等しくなる電圧指令を生成する電圧指令生成部と、
前記モータの推定回転位相角を算出する推定部と、
前記モータの特徴量と閾値との関係に応じて、前記電流指令又は前記電圧指令に高周波を重畳する高周波重畳部と、
を備えるモータ駆動システム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015014734 | 2015-01-28 | ||
| JP2015014734 | 2015-01-28 | ||
| PCT/JP2015/084540 WO2016121237A1 (ja) | 2015-01-28 | 2015-12-09 | インバータ制御装置及びモータ駆動システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JPWO2016121237A1 true JPWO2016121237A1 (ja) | 2017-08-24 |
Family
ID=56542871
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016571799A Withdrawn JPWO2016121237A1 (ja) | 2015-01-28 | 2015-12-09 | インバータ制御装置及びモータ駆動システム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20170264227A1 (ja) |
| EP (1) | EP3252942A1 (ja) |
| JP (1) | JPWO2016121237A1 (ja) |
| CN (1) | CN107078675A (ja) |
| WO (1) | WO2016121237A1 (ja) |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6767213B2 (ja) * | 2016-09-05 | 2020-10-14 | 東芝インフラシステムズ株式会社 | インバータ制御装置および電動機駆動システム |
| TWI654827B (zh) * | 2016-09-05 | 2019-03-21 | 日商東芝股份有限公司 | 換流器控制裝置及馬達驅動系統 |
| JP6776066B2 (ja) | 2016-09-05 | 2020-10-28 | 東芝インフラシステムズ株式会社 | インバータ制御装置および電動機駆動システム |
| EP3460984A1 (de) * | 2017-09-22 | 2019-03-27 | Siemens Aktiengesellschaft | Überwachungseinrichtung für eine reluktanzmaschine und verfahren zur überwachung |
| JP6755845B2 (ja) * | 2017-09-26 | 2020-09-16 | 株式会社東芝 | モータ駆動システム |
| DE112018006842B4 (de) * | 2018-01-12 | 2024-05-16 | Mitsubishi Electric Corporation | Steuereinrichtung für eine Rotationsmaschine |
| CN108574438A (zh) * | 2018-04-02 | 2018-09-25 | 江苏大学 | 一种飞跨电容开绕组三相永磁同步电机的逆变器开路混合调制容错控制方法 |
| KR102262010B1 (ko) * | 2019-02-25 | 2021-06-09 | 영남대학교 산학협력단 | 전류벡터에 기반한 속도 센서리스 모터 제어 시스템 및 풍력 발전 시스템 |
| DE102020122099A1 (de) * | 2020-09-04 | 2022-03-10 | Schaeffler Technologies AG & Co. KG | Verfahren zur Modulation der Drehmomentwelligkeit und/oder der Radialkraft einer drehstrombetriebenen elektrischen Maschine |
| DE102021205649A1 (de) | 2021-06-02 | 2022-12-08 | Volkswagen Aktiengesellschaft | Verfahren und Vorrichtung zum Regeln einer elektrischen Maschine |
| US20250309805A1 (en) * | 2022-05-17 | 2025-10-02 | Mitsubishi Electric Corporation | Rotary machine control device |
| US11848629B1 (en) * | 2022-05-26 | 2023-12-19 | GM Global Technology Operations LLC | Method and apparatus for electric motor control |
| JP2024072015A (ja) * | 2022-11-15 | 2024-05-27 | 株式会社豊田自動織機 | 電動機 |
| JP7819614B2 (ja) * | 2022-11-15 | 2026-02-25 | 株式会社豊田自動織機 | 電動機 |
| DE102023109006B4 (de) * | 2023-04-11 | 2024-10-24 | Schaeffler Technologies AG & Co. KG | Verfahren zur bestimmung der rotorlage eines ec-motors |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4687846B2 (ja) * | 2001-03-26 | 2011-05-25 | 株式会社安川電機 | 同期電動機の磁極位置推定方法および制御装置 |
| JP4899509B2 (ja) * | 2006-01-07 | 2012-03-21 | 日本電産株式会社 | 交流電動機の回転子位相推定装置 |
| US7932692B2 (en) * | 2006-11-13 | 2011-04-26 | Denso Corporation | Control system for rotary electric machine with salient structure |
| EP2191564B1 (en) * | 2007-08-20 | 2015-10-07 | Freescale Semiconductor, Inc. | Motor controller for determining a position of a rotor of an ac motor, ac motor system, and method of determining a position of a rotor of an ac motor |
| JP5435252B2 (ja) * | 2008-01-30 | 2014-03-05 | 株式会社ジェイテクト | 車両用操舵装置 |
| JP5151965B2 (ja) * | 2008-12-24 | 2013-02-27 | アイシン・エィ・ダブリュ株式会社 | センサレス電動機制御装置 |
| JP5321614B2 (ja) * | 2011-02-28 | 2013-10-23 | 株式会社デンソー | 回転機の制御装置 |
| JP5652664B2 (ja) * | 2011-10-21 | 2015-01-14 | アイシン・エィ・ダブリュ株式会社 | 回転電機制御装置 |
| JP5644820B2 (ja) * | 2012-08-17 | 2014-12-24 | 株式会社安川電機 | モータ制御装置 |
| JP6056959B2 (ja) * | 2013-03-28 | 2017-01-11 | アイシン・エィ・ダブリュ株式会社 | 回転電機制御装置 |
-
2015
- 2015-12-09 WO PCT/JP2015/084540 patent/WO2016121237A1/ja not_active Ceased
- 2015-12-09 EP EP15880129.0A patent/EP3252942A1/en not_active Withdrawn
- 2015-12-09 JP JP2016571799A patent/JPWO2016121237A1/ja not_active Withdrawn
- 2015-12-09 CN CN201580058309.9A patent/CN107078675A/zh not_active Withdrawn
-
2017
- 2017-05-26 US US15/606,663 patent/US20170264227A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| CN107078675A (zh) | 2017-08-18 |
| EP3252942A1 (en) | 2017-12-06 |
| US20170264227A1 (en) | 2017-09-14 |
| WO2016121237A1 (ja) | 2016-08-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JPWO2016121237A1 (ja) | インバータ制御装置及びモータ駆動システム | |
| TWI654827B (zh) | 換流器控制裝置及馬達驅動系統 | |
| US9531313B2 (en) | Apparatus for controlling controlled variable of rotary machine to command value | |
| JP6367332B2 (ja) | インバータ制御装置及びモータ駆動システム | |
| JP4687846B2 (ja) | 同期電動機の磁極位置推定方法および制御装置 | |
| US9742333B2 (en) | Motor control device | |
| JP5098439B2 (ja) | 永久磁石同期電動機のセンサレス制御装置 | |
| CN103595326A (zh) | 电机控制装置和电机控制方法 | |
| JPWO2016189694A1 (ja) | 交流回転機の制御装置および電動パワーステアリングの制御装置 | |
| JP6075090B2 (ja) | モータ制御装置 | |
| KR102409792B1 (ko) | 영구 자석 동기 전동기의 제어 장치, 마이크로 컴퓨터, 전동기 시스템 및 영구 자석 동기 전동기의 운전 방법 | |
| JP5493536B2 (ja) | 電動機の制御装置 | |
| CN112204869B (zh) | 电力转换装置 | |
| JP2014195352A (ja) | モータ制御装置 | |
| US11837982B2 (en) | Rotary machine control device | |
| JP6422796B2 (ja) | 同期機制御装置及び駆動システム | |
| JP5851662B1 (ja) | 交流回転機の制御装置 | |
| JP6563135B2 (ja) | モータの制御装置 | |
| JP7251424B2 (ja) | インバータ装置及びインバータ装置の制御方法 | |
| JP2018125955A (ja) | モータ制御装置 | |
| JP6544204B2 (ja) | モータの制御装置 | |
| JP7226211B2 (ja) | インバータ装置及びインバータ装置の制御方法 | |
| JP6089608B2 (ja) | 同期電動機の制御方法 | |
| JP6012037B2 (ja) | 電力変換装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170512 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20170904 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20170905 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20171225 |