KR20120005452A - 센서 어셈블리 - Google Patents
센서 어셈블리 Download PDFInfo
- Publication number
- KR20120005452A KR20120005452A KR1020117023440A KR20117023440A KR20120005452A KR 20120005452 A KR20120005452 A KR 20120005452A KR 1020117023440 A KR1020117023440 A KR 1020117023440A KR 20117023440 A KR20117023440 A KR 20117023440A KR 20120005452 A KR20120005452 A KR 20120005452A
- Authority
- KR
- South Korea
- Prior art keywords
- pole
- magnetic track
- magnetic
- group
- high resolution
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 238000000034 method Methods 0.000 claims description 30
- 230000005355 Hall effect Effects 0.000 claims description 15
- 238000010586 diagram Methods 0.000 description 6
- 238000005096 rolling process Methods 0.000 description 4
- 239000000758 substrate Substances 0.000 description 2
- 230000000712 assembly Effects 0.000 description 1
- 238000000429 assembly Methods 0.000 description 1
- 230000009977 dual effect Effects 0.000 description 1
- 230000005405 multipole Effects 0.000 description 1
Images








Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
- G01D5/142—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage using Hall-effect devices
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
- G01D5/142—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage using Hall-effect devices
- G01D5/145—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage using Hall-effect devices influenced by the relative movement between the Hall device and magnetic fields
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/244—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing characteristics of pulses or pulse trains; generating pulses or pulse trains
- G01D5/245—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing characteristics of pulses or pulse trains; generating pulses or pulse trains using a variable number of pulses in a train
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/244—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing characteristics of pulses or pulse trains; generating pulses or pulse trains
- G01D5/245—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing characteristics of pulses or pulse trains; generating pulses or pulse trains using a variable number of pulses in a train
- G01D5/2454—Encoders incorporating incremental and absolute signals
- G01D5/2455—Encoders incorporating incremental and absolute signals with incremental and absolute tracks on the same encoder
- G01D5/2457—Incremental encoders having reference marks
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D2205/00—Indexing scheme relating to details of means for transferring or converting the output of a sensing member
- G01D2205/85—Determining the direction of movement of an encoder, e.g. of an incremental encoder
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Transmission And Conversion Of Sensor Element Output (AREA)
Abstract
센서 어셈블리는 복수의 극 접합들에 의해 분리된 복수의 자극들을 갖는 자기 트랙(magnetic track)을 포함한다. 센서 어셈블리는 또한 자기 트랙의 고해상도 부분에 근접하여 배치된 제1 자기 센서, 및 자기 트랙의 기준 부분에 근접하여 배치된 제2 자기 센서를 포함한다. 제2 자기 센서는 자기 트랙 상에 인접한 극 접합들에 걸쳐진다. 인접한 극 접합들 각각은 자기 트랙의 고해상도 부분에 대응하는 고해상도 세그먼트, 자기 트랙의 기준 부분에 대응하는 기준 세그먼트를 포함한다. 각각의 극 접합의 기준 세그먼트는 오프셋되거나 각각의 극 접합에서 대응하는 고해상도 세그먼트와 나란히 정렬되는 것 중 하나이다.
Description
관련 출원들의 상호 참조
본 출원은 2009년 4월 6일 출원된 동시 계류중인 미국 가출원 제61/166,946호에 대해 우선권을 주장하며, 그 전체 내용은 본 명세서에 참조로서 통합된다.
발명의 분야
본 발명은 일반적으로 센서 어셈블리들과 관련되며, 특히 복수의 자극 쌍들을 갖는 자기 트랙을 포함하는 자기 인코더들과 관련된다.
자기 인코더들은 통상적으로 기계 시스템에서 이동하는 물체의 위치를 결정하는 데 활용되므로 물체의 위치 또는 이동은 기계 시스템에서 제어될 수 있다. 자기 인코더들은 통상적으로, 이중의 다중극(multi-pole) 자기 트랙들을 포함하고 이동하는 물체 상에 탑재된 타깃(target)과 개별 자기 트랙들의 극들에 인접하여 배치된 자기 센서들(예를 들어, 홀-효과(Hall-effect) 디바이스들의 열들)을 포함한다. 개별 자기 트랙들의 극 간격은 개별 트랙들을 통해 자기 센서들에 의해 검출된 신호들에서의 위상차를 유도하기 위해서 통상 다르다. 자기 센서들의 개별 신호들 사이의 위상차는 타깃 및 그러므로 이동가능한 물체의 위치를 임의의 주어진 시간에 결정하는 데 활용될 수 있다. 환원하면, 자기 트랙들 중 하나의 위치(즉, "측정된 트랙")는 측정된 트랙을 통해 자기 센서에 의해 출력된 신호와 다른 트랙(즉, "기준 트랙")을 통해 자기 센서에 의해 출력된 신호를 비교함으로써 결정될 수 있다.
본 발명은, 일 양상으로, 복수의 극 접합(pole junction)들에 의해 분리된 복수의 자극(magnetic pole)들을 갖는 자기 트랙(magnetic track)을 포함하는 센서 어셈블리를 제공한다. 센서 어셈블리는 또한 자기 트랙의 고해상도 부분 배치된 제1 자기 센서, 및 자기 트랙의 기준 부분에 근접하여 배치된 제2 자기 센서를 포함한다. 제2 자기 센서는 자기 트랙 내에 인접한 극 접합들에 걸친다. 인접한 극 접합들 각각은 자기 트랙의 고해상도 부분에 대응하는 고해상도 세그먼트, 자기 트랙의 기준 부분에 대응하는 기준 세그먼트를 포함한다. 각각의 극 접합의 기준 세그먼트는 오프셋되거나 각각의 극 접합에서 대응하는 고해상도 세그먼트와 나란히 정렬된다.
본 발명은, 다른 양상으로, 인코더의 자기 트랙 상의 위치를 결정하는 방법을 제공한다. 이 방법은 자기 트랙의 일부를 형성하는 자극 쌍들의 그룹을 제공하는 단계, 자기 트랙의 고해상도 부분에 근접한 제1 자기 센서를 이용하여 그룹에서의 제1 자극 쌍 내의 상대적 위치를 기록하는 단계, 자기 트랙의 기준 부분에 근접하여 위치된 제2 자기 센서로 자극 쌍들의 그룹 내에서 인접한 극 접합들을 검출하는 단계, 그룹 내에서 제1 자극 쌍의 상대적 위치를 결정하기 위해서 인접하는 극 접합들을 제1 자극 쌍과 서로 연관시키는 단계, 및 제1 자극 쌍 내의 상대적 위치를 이용하여 그룹 내의 국부적(local) 절대 위치와, 그룹 내의 제1 자극 쌍의 상대적 위치를 계산하는 단계를 포함한다.
본 발명의 다른 특징들 및 양상들은 다음의 상세한 설명과 첨부한 도면들을 고려하여 분명해질 것이다.
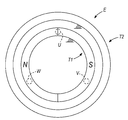
도 1은 본 발명의 센서 어셈블리의 제1 실시예의 개략도이며, 자기 트랙 및 자기 트랙 상의 제1 위치에 근접하여 배치된 2개 자기 센서들을 예시한다.
도 2는 도 1의 2개 자기 센서들을 포함하는 단일 마이크로칩의 개략도이다.
도 3은 자기 트랙 상의 제2 위치에 근접하여 배치된 도 1의 자기 센서들의 개략도이다.
도 4는 U, V, W 스타일 통신 신호들을 출력하도록 동작가능한 종래의 센서 어셈블리의 개략도이다.
도 5는 도 4의 종래 센서 어셈블리 또는 도 1의 자기 인코더에 의해 출력될 수 있는 U, V, W 스타일 통신 신호들을 예시하는 그래프이다.
도 6은 본 발명의 센서 어셈블리의 다른 실시예의 개략도이다.
도 7은 본 발명의 센서 어셈블리의 또 다른 실시예의 개략도이며, 자기 트랙 및 자기 트랙 상의 제1 위치에 근접하여 배치된 2개 자기 센서들을 예시한다.
도 8은 자기 트랙 상의 제2 위치에 근접하여 배치된 도 7의 자기 센서들의 개략도이다.
도 9는 본 발명의 센서 어셈블리의 다른 실시예의 개략도이며, 다른 오프셋 치수들을 갖는 극 접합들을 예시한다.
본 발명의 임의의 실시예들이 상세히 설명되기 전에, 본 발명은 다음의 설명에서 제시되거나 다음의 도면들에서 예시된 컴포넌트들의 배열 및 구조의 상세한 설명에 대해 그의 애플리케이션에 제한을 두지 않는다는 점을 이해할 것이다. 본 발명은 다른 실시예들이 가능하고 다양한 방법들로 실시되거나 실행될 수 있다. 또한, 본 명세서에서 사용된 어법(phraseology) 및 용어(terminology)는 설명을 목적으로 하고 제한적으로 간주되지 않아야 한다는 점을 이해할 것이다.
도 2는 도 1의 2개 자기 센서들을 포함하는 단일 마이크로칩의 개략도이다.
도 3은 자기 트랙 상의 제2 위치에 근접하여 배치된 도 1의 자기 센서들의 개략도이다.
도 4는 U, V, W 스타일 통신 신호들을 출력하도록 동작가능한 종래의 센서 어셈블리의 개략도이다.
도 5는 도 4의 종래 센서 어셈블리 또는 도 1의 자기 인코더에 의해 출력될 수 있는 U, V, W 스타일 통신 신호들을 예시하는 그래프이다.
도 6은 본 발명의 센서 어셈블리의 다른 실시예의 개략도이다.
도 7은 본 발명의 센서 어셈블리의 또 다른 실시예의 개략도이며, 자기 트랙 및 자기 트랙 상의 제1 위치에 근접하여 배치된 2개 자기 센서들을 예시한다.
도 8은 자기 트랙 상의 제2 위치에 근접하여 배치된 도 7의 자기 센서들의 개략도이다.
도 9는 본 발명의 센서 어셈블리의 다른 실시예의 개략도이며, 다른 오프셋 치수들을 갖는 극 접합들을 예시한다.
본 발명의 임의의 실시예들이 상세히 설명되기 전에, 본 발명은 다음의 설명에서 제시되거나 다음의 도면들에서 예시된 컴포넌트들의 배열 및 구조의 상세한 설명에 대해 그의 애플리케이션에 제한을 두지 않는다는 점을 이해할 것이다. 본 발명은 다른 실시예들이 가능하고 다양한 방법들로 실시되거나 실행될 수 있다. 또한, 본 명세서에서 사용된 어법(phraseology) 및 용어(terminology)는 설명을 목적으로 하고 제한적으로 간주되지 않아야 한다는 점을 이해할 것이다.
도 1을 참조하면, 센서 어셈블리 또는 자기 인코더(10)가 개략적으로 예시된다. 인코더(10)는 복수의 N/S극 쌍들(North/South pole pairs)(18)을 갖는 자기 트랙(14)을 포함한다. 자기 트랙(14)은 명확성을 위해서 선형 배치로 개략적으로 예시되지만, 인코더(10)는 자기 트랙(14)이 탑재되는 회전 타깃(22)을 포함하는 회전 인코더로 구성된다. 이러한 구성에서, 자기 트랙(14)은 원형이며 회전 타깃(22)의 회전 축과 중심이 같을 것이다. 그러나, 본 발명의 인코더(10)는 대안으로, 회전 인코더(10)에 대해서 본 명세서에 기술된 바와 같이 실질적으로 유사한 구조 및 작동 방법을 포함하는 선형 인코더로서 구성될 수 있다.
계속 도 1을 참조하면, 자기 트랙(14)의 일부만이 도시되어 있다. 구체적으로, 자기 트랙(14)의 예시된 부분은 4개의 극 쌍들(18a-18d)의 그룹(26)을 포함하고, 이들 각각은 개별 극 쌍들(18) 내에서 각각의 N/S극들을 분리하는 극 접합(30)을 포함한다. 극 접합들(30) 각각은 자기 트랙(14)의 고해상도 부분(38)에 대응하는 고해상도 세그먼트(34) 및 자기 트랙(14)의 기준 부분(46)에 대응하는 기준 세그먼트(42a, 42b)로 나뉜다(이하 상세히 논의됨). 자기 트랙(14) 내의 극 접합들(30) 각각은 또한 살짝 밀리거나(jogg) 계단 모양이 되어(step), 극 접합들(30) 각각의 기준 세그먼트(42a, 42b)는 동일한 극 접합(30)의 고해상도 세그먼트(34)로부터 오프셋된다. 특히, 인접한 극 접합들(30)의 고해상도 세그먼트들(34)은 서로 균일하게 간격을 두고 있는 한편, 인접한 극 접합들(30)의 기준 세그먼트들(42a, 42b)은 인접한 기준 세그먼트들(42a, 42b)의 오프셋 방향에 따라 균일하지 않게 간격을 둘 수 있다.
계속 도 1을 참조하면, 몇몇 극 접합들(30)은 동일한 극 접합(30)의 고해상도 세그먼트(34)의 오른쪽으로 오프셋된 기준 세그먼트(42a)(즉, 오른쪽-오프셋 기준 세그먼트(42a))를 포함하는 한편, 다른 극 접합들(30)은 동일한 극 접합(30)의 고해상도 세그먼트(34)의 왼쪽으로 오프셋된 기준 세그먼트(42b)(즉, 왼쪽-오프셋 기준 세그먼트(42b))를 포함한다. 기준 세그먼트들(42a, 42b)은 그룹(26) 내의 각각의 극 쌍(18a-18d)에 대한 상태들(예를 들어, 오른쪽-오프셋 또는 왼쪽-오프셋 중 어느 하나)의 고유한 조합 또는 시퀀스를 제공하기 위해서 인접한 자극 쌍들(18a-18d)의 그룹(26) 내에 배열될 수 있다. 그 결과, 특정한 극 쌍(18a-18d)은 인접한 오른쪽-오프셋 및 왼쪽-오프셋 기준 세그먼트들(42a, 42b)의 관련된 고유한 조합과 이것을 매칭시킴으로써 확인될 수 있다. 이러한 "2-상태" 논리를 이용하여(즉, 오른쪽-오프셋 및 왼쪽-오프셋 기준 세그먼트(42a, 42b)만을 이용하여), 도 1에 예시된 4개의 인접한 극 쌍들(18a-18d)은 아래 표 1에 따라서 고유하게 확인될 수 있으며, 여기서 "R"은 오른쪽-오프셋 기준 세그먼트(42a)를 나타내고, "L"은 왼쪽-오프셋 기준 세그먼트(42b)를 나타낸다.
| 극 접합 |
극 쌍들 |
|||
| 1 | 2 | 3 | 4 | |
| N/S | L | L | R | R |
| S/N | L | R | L | R |
N/S 극 접합은 특정한 극 쌍(18a-18d) 내에서 N 및 S극들 사이의 극 접합(30)인 반면, S/N 극 접합은 인접한 극 쌍들(18a-18d)의 S극 및 N극 사이의 극 접합(30)이다. 이하 더욱 상세히 설명되는 바와 같이, 본 발명의 자기 인코더(10)는 극 쌍들(18a-18d) 내에서 개별 극들을 분리하는 인접한 오른쪽-오프셋 및 왼쪽-오프셋 기준 세그먼트들(42a, 42b)의 고유한 조합을 인식함으로써 4개의 자극 쌍들(18a-18d)의 그룹(26) 내에서 자기 트랙(14)의 절대 위치를 국부적으로(locally) 결정하도록 동작가능하다.
자기 인코더(10)는 또한 트랙(14)의 고해상도 부분(38)에 근접한 제1 또는 고해상도 자기 센서(50), 및 트랙(14)의 기준 부분(46)에 근접한 제2 자기 센서(54)를 포함한다. 센서들(50, 54) 각각은 홀 스트링 멀티플라잉 센서(Hall string multiplying sensor)로 구성되고, 센서들(50, 54) 모두는 단일 기판 또는 마이크로칩(58) 상에 배치된다(도 2 참조). 각각의 센서들(50, 54)은 한 줄로 배열된 개별(예를 들어, 4개 이상) 홀 센싱 소자들의 배열을 포함한다. 특히, 인코더(10)의 일 실시예에서, 각각의 센서들(50, 54)은 한 줄로 배열된 16개의 개별 홀 센싱 소자들의 배열을 포함할 수 있다. 도 1을 참조하면, 기준 센서(54) 및 고해상도 센서(50) 모두는 자기 트랙(14) 내의 인접한 극 접합들(30)에 걸치기 충분한 길이를 가지며, 임의의 주어진 시간에 인접한 극 접합들(30)의 존재(즉, 적어도 하나의 N/S 극 접합(30) 및 적어도 하나의 인접한 S/N 극 접합(30))를 검출한다. 바꾸어 말하면, 센서들(50, 54) 각각의 길이는 인접한 극 접합들 사이의 간격보다 크다. 각각의 극 접합(30)에서 고해상도 세그먼트(34) 및 기준 세그먼트(42a, 42b) 사이 오프셋의 양은 기준 센서(54) 내에 인접한 개별 홀 센싱 소자들 사이의 간격보다 작을 수 있다. 대안으로, 고해상도 센서(50)는 자기 트랙(14) 내의 인접한 극 접합들(30)에 걸치지 않을 수 있다. 또 다른 대안으로서, 센서들(50, 54)은 분리된 마이크로칩들 상에 배치될 수 있거나, 또는 각 센서 배열 내의 개별 센서 소자들은 분명한 홀-효과 센서들로서 서로 독립적으로 지원될 수 있다.
도 1 및 도 2를 참조하면, 자기 인코더(10)는 센서들(50, 54)과 통신하여 논리 모듈(logic module)(62)을 또한 포함한다. 논리 모듈(62)은 하드웨어에 내장된(hard-wired) 전자 회로 또는 센서들(50, 54)에 의해 각각 검출된 고해상도 및 기준 신호들을 수신하고, 신호들을 분석하고, 4개 극 쌍들(18a-18d)의 그룹(26) 내의 자기 트랙(14)의 국부적 절대 위치를 계산하도록 동작가능한 마이크로프로세서일 수 있다. 논리 모듈(62)은 센서들(50, 54)을 갖는 마이크로칩(58) 상에 위치될 수 있거나 또는 논리 모듈(62)은 마이크로칩(58) 외에 다른 기판 상에 위치될 수 있다. 물리적(즉, 유선) 연결이 도 1 및 도 2에 개략적으로 예시되어 있다고 해도, 무선 통신은 센서들(50, 54)이 논리 모듈(62)과 통신하는 것을 허용하도록 이용될 수 있다. 논리 모듈(62)은 4개 극 쌍들(18a-18d)의 그룹(26) 내의 자기 트랙(14)의 국부적 절대 위치를 인코더(10)가 사용되는 시스템의 다른 제어기(예를 들어, 모터 제어기)로 출력하도록 더 동작가능하다.
당업자들에게 이해되는 바와 같이, 고해상도 센서(50)는 자기 트랙(14)의 회전당 총 카운트 수 또는 에지들을 산출하기 위해서 특정한 해상도(즉, 극 쌍 당 "카운트들" 또는 "에지들")로 구성될 수 있다. 예를 들어, 고해상도 센서(50)는 160 카운트/극 쌍의 해상도를 갖고 구성될 수 있으므로, 자기 트랙(14)이 도 1에 도시된 4개 극 쌍들(18a-18d)의 그룹(26)을 통해 회전함에 따라 총 640 카운트가 검출될 수 있다. 총 640 카운트에 도달하기 위해서, 고해상도 센서(50)는 제1 극 쌍(18a)에 대해서 1부터 160까지 수를 세고(제1 자극 쌍(18a)의 N극 내에서 발생하는 1-80 카운트와 S극 내에서 발생하는 81-160 카운트와 함께), 리셋한 후, 제2 극 쌍(18b) 등에 대해서 1부터 160까지 수세기를 계속할 것이다.
그러나, 앞서 언급한 바와 같이, 자기 트랙(14)의 일부만이 도 1에 도시되어 있다. 인코더(10)의 전형적인 애플리케이션은 자기 트랙(14) 상에 적어도 16개의 자극 쌍들을 필요로 할 것이다. 이러한 경우에, 도 1에 도시된 4개 극 쌍들(18a-18d)의 그룹(26)은 필요한 16개 극 쌍들을 산출하기 위해서 자기 트랙(14)의 원주(circumferential) 길이 주변에서 4번 반복될 것이다. 따라서, 자기 트랙(14)의 절대 위치는, 도 1에 도시되고 표 1에서 설명된 인접한 오른쪽-오프셋 및 왼쪽-오프셋 기준 세그먼트들(42a, 42b)의 고유한 조합을 이용하여 자기 트랙(14)이 첨부된 회전 타깃(22)의 1/4-회전 내에서 국부적으로 결정될 수 있다.
인코더(10)의 동작 중에(즉, 회전 타깃(22) 및 자기 트랙(14)이 센서들(50, 54)에 대해서 시계 방향으로 또는 도 1의 관점으로부터 왼쪽에서 오른쪽 방향으로 회전하고 있을 때), 고해상도 센서(50)는 트랙(14)의 고해상도 부분(38)에서 발산되는 자기장을 검출하도록 구성되고, 기준 센서(54)는 트랙(14)의 기준 부분(46)에서 발산되는 자기장을 검출하도록 구성된다. 센서들(50, 54) 각각의 아날로그 출력은 사인 곡선(sinusoidal)이고, 각각의 극 쌍(18a-18d)에서 N극과 관련된 양의 값과 각각의 극 쌍(18a-18d)에서 S극과 관련된 음의 값을 갖는다. 극 접합들(30)의 기준 세그먼트들(42a, 42b)의 고유한 간격의 결과로서, 기준 센서(54)의 사인 곡선 출력은 고해상도 센서(50)의 사인 곡선 출력과 반대 위상이다.
센서들(50, 54) 각각의 사인 곡선 출력은 논리 모듈(62)로 입력되어, 센서들(50, 54) 각각의 사인 곡선 출력을 비교하고 기준 센서(54)의 사인 곡선 출력의 위상이 고해상도 센서(50)의 사인 곡선 출력을 앞서는지(leading) 또는 고해상도 센서(50)의 사인 곡선 출력에 뒤처지는지(lagging)를 결정한다. 특히, 논리 모듈(62)은 기준 센서(54)의 개별 홀 소자들의 사인 곡선 출력을 고해상도 센서(50)의 개별 홀 소자들의 사인 곡선 출력과 각각 비교할 수 있다. 대안으로, 논리 모듈(62)은 기준 센서(54)의 인접한 홀 소자들의 그룹 출력의 롤링 평균(rolling average)(예를 들어, 3 또는 6)을 고해상도 센서(50)의 인접한 홀 소자들의 그룹 출력의 롤링 평균과 비교할 수 있다.
바꾸어 말하면, 논리 모듈(62)은 기준 센서(54)가 왼쪽-오프셋 기준 세그먼트(42b)에 근접하여 배치되는지(즉, 기준 센서(54)의 사인 곡선 출력이 고해상도 센서(50)의 사인 곡선 출력을 앞서는 경우)를 또는 기준 센서(54)가 오른쪽-오프셋 기준 세그먼트(42a)에 근접하여 배치되는지(즉, 기준 센서(54)의 사인 곡선 출력이 고해상도 센서(50)의 사인 곡선 출력에 뒤처지는 경우)를 결정하도록 동작가능하다. 기준 센서(54)가 자기 트랙(14) 상의 적어도 하나의 N/S 극 접합(30)과 적어도 하나의 S/N 극 접합(30) 사이의 거리에 걸치기 때문에, 기준 센서(54)는 인접한 N/S 및 S/N 극 접합(30)을 검출하도록 동작가능하고, 논리 모듈(62)은 그룹(26) 내의 특정한 극 쌍(18a-18d)의 상대적 위치를 결정하기 위해서 기준 센서(54)에 의해 검출된 N/S 및 S/N 극 접합(30)의 특정한 조합을 도 1에 도시한 4개 극 쌍들(18a-18d)의 그룹(26) 내의 자극 쌍들(18a-18d) 중 하나와 관련시키도록 동작가능하다. 인코더(10)는 자기 트랙(14)이 기준 센서(54)에 대해서 회전하거나 또는 고정될 때 이러한 방식으로 동작가능하다는 점을 이해하여야 한다.
계속 도 1을 참조하면, 자기 트랙(14)은 기준 센서(54)가 제3 극 쌍(18c)의 N/S 극 접합(30)과 제3 및 제4 극 쌍들(18c, 18d) 사이의 S/N 극 접합(30)에 각각 걸치는 위치에서 회전되어 도시된다. 이 점에서, 논리 모듈(62)은 전술한 바와 같이, 기준 센서(54)와 고해상도 센서(50)의 사인 곡선 출력들의 위상차를 비교함으로써 제3 극 쌍(18c)의 N/S 극 접합(30)과 관련된 오른쪽-오프셋 기준 세그먼트(42a)와 제3 및 제4 극 쌍들(18c, 18d) 사이의 S/N 극 접합(30)과 관련된 왼쪽-오프셋 기준 세그먼트(42b)를 인식함으로써 4개 극 쌍들(18a-18d)의 그룹(26) 내의 자기 트랙(14)의 절대 위치를 국부적으로 결정할 수 있다. 다음으로, 논리 모듈(62)은 제3 극 쌍(18c)만이 오른쪽-오프셋 및 왼쪽-오프셋 기준 세그먼트들(42a, 42b)의 검출된 조합을 포함한다는 점을 알게 되도록 표 1과 유사한 검색 표(lookup table)를 참조할 것이며, 두 쌍들(즉, 극 쌍들(18a 및 18b))은 기준 센서(54)의 왼쪽에 있고, 기준 센서(54)는 제3 극 쌍(18c)에 근접하여 또는 제3 극 쌍(18c)과 나란히 정렬됨을 의미한다. 다음으로, 논리 모듈(62)은 고해상도 센서(50)의 기록되거나 획득된 카운트 값을 이용하여 그룹(26) 내의 국부적 절대 위치와 그룹(26) 내의 제3 극 쌍(18c)의 상대 위치를 계산할 수 있다. 구체적으로, 논리 모듈(62)은 4개 극 쌍들(18a-18d)의 그룹(26) 내의 자기 트랙(14)의 국부적 절대 위치를 결정하기 위해서 다음의 계산을 행할 것이다: 기준 센서(54)의 왼쪽에 있는 2개 극 쌍들 × 160 카운트/극 쌍 + 고해상도 센서(50)에 의해 검출되거나 획득된 카운트들의 수. 예를 들어, 일례로 고해상도 센서(50)의 획득된 카운트 값이 70일 때, 계산된 카운트 값은 390(즉, 2 ×160 + 70)이 되고, 4개 자극 쌍들(18a-18d)의 로컬 그룹(26) 내의 센서(50)에 의해 검출될 수 있는 640개 총 카운트 위치들 중 390번째 위치와 관련된다.
도 3을 참조하여 다른 예를 고려하면, 자기 트랙(14)은 기준 센서(54)가 제1 극 쌍(18a) 및 제2 극 쌍(18b) 사이의 S/N 극 접합(30)과 제2 극 쌍들(18b) 내의 N/S 극 접합(30)에 걸치는 위치에서 회전되어 도시된다. 이 점에서, 논리 모듈(62)은 전술한 바와 같이, 기준 센서(54)와 고해상도 센서(50)의 사인 곡선 출력들의 위상차를 비교함으로써 제1 및 제2 극 쌍들(18a, 18b) 사이의 S/N 극 접합(30)과 관련된 왼쪽-오프셋 기준 세그먼트(42b)와 제2 극 쌍(18b) 내의 N/S 극 접합(30)과 관련된 왼쪽-오프셋 기준 세그먼트(42b)를 인식함으로써 4개 극 쌍들(18a-18d)의 로컬 그룹(26) 내의 자기 트랙(14)의 절대 위치를 국부적으로 결정할 수 있다. 다음으로, 논리 모듈(62)은 오른쪽-오프셋 및 왼쪽-오프셋 기준 세그먼트들(42a, 42b)의 검출된 조합이 제1 및 제2 극 쌍들(18a, 18b) 사이 어딘가에 기준 센서(54)를 위치시킨다는 점을 알게 되도록 표 1과 유사한 검색 표를 참조할 것이다.
다음으로, 논리 모듈(62)은 고해상도 센서(50)에 의해 획득된 카운트 값을 고려해 볼 것이다. 획득된 카운트 값이 81과 160 사이에 있다면, 국부적 절대 위치는 제1 극 쌍(18a) 내의 어딘가이다. 그러나, 획득된 카운트 값이 1과 80 사이에 있다면, 국부적 절대 위치는 제2 극 쌍(18b) 내의 어딘가이다. 고해상도 센서(50)의 카운트 값=30에 대해서, 논리 모듈(62)은 4개 극 쌍들(18a-18d)의 로컬 그룹(26) 내의 절대 위치를 결정하기 위해서 다음의 계산을 행할 것이다: 기준 센서(54)의 왼쪽에 있는 1개 극 쌍 × 160 카운트/극 쌍 + 30 = 190이고, 4개 자극 쌍들(18a-18d)의 로컬 그룹(26) 내의 센서(50)에 의해 검출될 수 있는 640개 총 카운트 위치들 중 190번째 위치와 관련된다. 고해상도 센서(50)의 카운트 값=130에 대해서, 논리 모듈(62)은 4개 극 쌍들(18a-18d)의 로컬 그룹(26) 내의 절대 위치를 결정하기 위해서 다음의 계산을 행할 것이다: 기준 센서(54)의 왼쪽에 있는 0개 극 쌍들 × 160 카운트/극 쌍 + 130 = 130이고, 4개 자극 쌍들(18a-18d)의 로컬 그룹(26) 내의 센서(50)에 의해 검출될 수 있는 640개 총 카운트 위치들 중 130번째 위치와 관련된다.
도 4를 참조하면, 종래의 자기 인코더들(E)은 통상적으로 3개의 개별 홀-효과 센서들(U, V, W), 하나 이상의 N/S 극 쌍들(도 4에는 단일 N/S 극 쌍만이 도시됨)을 갖는 전용 자기 트랙(T1), 및 공통 회전 타깃(예를 들어, 전기 모터의 전기자(armature))에 부착된 고해상도 자기 트랙(T2)를 포함한다. 센서들(U, V, W)은 트랙들(T1, T2)의 회전축들에 대해서 120도 간격들로 구분되며, 트랙(T1)의 개별 극 쌍들 사이에서 극 접합들을 검출함으로써 "온" 및 "오프" 스위치된다. 그러므로, 각 센서(U, V, W)는 자기 트랙(T1)의 180도 회전에 대해 턴 "온"되고, 각 센서(U, V, W)는 자기 트랙(T1)의 180도 회전에 대해 턴 "오프"된다(도 5 참조). 그 결과, 자기 트랙들(T1, T2)의 위치는 자기 트랙들(T1, T2)의 단일 완전한 회전 및 관련된 회전 타깃을 통해 센서들(U, V, W)의 "온" 및 "오프" 상태들의 고유한 조합들을 이용하여 결정될 수 있다. 예를 들어, 아래 표 2는 자기 트랙(T1) 및 센서들(U, V, W)에 의해 나타낸 "온" 및 "오프" 상태들의 고유한 조합들에 기초한 관련된 회전 타깃의 6개 다른 회전 위치들을 예시한다.
| 회전 위치 번호 | 회전 위치(각도) | U, V, W 출력 (1="온"; 0="오프") |
|
| 1 | 0 - 60 | 1, 0, 1 | |
| 2 | 61 - 120 | 1, 0, 0 | |
| 3 | 121 - 180 | 1, 1, 0 | |
| 4 | 181 - 240 | 0, 1, 0 | |
| 5 | 241 - 300 | 0, 1, 1 | |
| 6 | 301 - 360 | 0, 0, 1 | |
도 4의 자기 인코더(E)에 의해 출력된 U, V, W 통신 신호들을 이용하여, 자기 인코더(E)와 접속하는 제어기는 트랙들(T1, T2) 및 관련된 회전 타깃(즉, 60도 증가분 내)의 회전 위치를 결정할 수 있다. 예를 들어, 도 4에 도시된 자기 인코더(E)는 전기자의 회전당 4배의 주파수로 모터의 필드 컴포넌트에 대하여 브러시리스(brushless) DC 전기 모터의 전기자의 위치를 검출하기 위해서 모터 제어기를 사용하여 실행될 수 있다. 그래서, 전기자의 1/4 회전당 한번, 전기 인코더(E)의 U, V, W 출력은 모터의 필드 컴포넌트에 대하여 트랙들(T1, T2) 및 전기자의 상대적 위치를 결정하기 위해서 모터 제어기에 의해 분석된다(즉, U, V, W 출력은 위치들 (1-6) 중 하나와 관련될 것이다; 표 2 참조). 다음으로, 모터 제어기는 모터의 필드 컴포넌트에 대하여 전기자가 지속적으로 회전하게 하도록 전기자를 통하는 전류 방향을 전환하기 위해서 이러한 정보를 이용한다.
도 1의 인코더(10)는 추가적인 홀-효과 센서들(U, V, W) 및 전용의 단일 극 쌍 자기 트랙(T1) 없이 동일한 U, V, W 통신 신호들을 생성하는 데 사용될 수 있다. 구체적으로, 자기 트랙(14) 내에 16개 극 쌍들을 필요로 하는 인코더(10)의 애플리케이션에서, 도 1에 도시된 4개 극 쌍들(18a-18d)의 그룹(26)은 필요한 16개 극 쌍들을 산출하기 위해서 자기 트랙(14)의 원주 길이 주변에서 4번 반복될 것이며, 그래서 각 그룹(26)은 자기 트랙(14)의 1/4 회전 또는 90도 회전 및 회전 타깃(22)과 동시에 일어난다. 그러므로, 논리 모듈(62)은 2개의 연속하는 극 쌍 그룹들(26)에 대해서 "1"의 값을 갖고, 다음의 2개 연속하는 극 쌍 그룹들(26)에 대해서 "0"의 값을 갖는 도 5의 "U" 출력과 유사한 직사각형파를 생성할 수 있다. 다음으로, 논리 모듈(62)은 U 출력과 120도만큼 위상이 다른 도 5의 "V" 출력과 유사한 제2의 직사각형파, 및 U 출력과 240도만큼 위상이 다른 도 5의 "W" 출력과 유사한 제3의 직사각형파를 생성할 수 있다. 상기 브러시리스 DC 전기 모터 예를 이용하여, 논리 모듈(62)에 의해 생성된 직사각형파들은 전술한 바와 유사한 방식으로, 모터의 필드 컴포넌트에 대하여 전기자가 지속적으로 회전하게 하도록 전기자를 통하는 전류 방향을 전환하기 위해서 이러한 정보를 이용할 모터 제어기에 입력될 수 있다.
인코더(10)는 또한 극 쌍들(18a-18d)의 단일 그룹(26)이 회전 타깃(22)의 완전한 회전에 걸친다면 완전한 회전에 걸친 자기 트랙(14) 및 부착된 회전 타깃(22)의 절대 위치를 결정하는 데 사용될 수 있다. 이러한 상황에서, 계산된 카운트 위치는 4개 극 쌍들(18a-18d)의 그룹(26) 내의 국부적 절대 위치를 나타낼 뿐만 아니라, 회전 타깃(22)의 완전한 회전에 걸치는 자기 트랙(14)의 절대 위치를 나타낸다. 인코더(10)는 또한 몇몇 브러시리스 DC/AC 전기 모터 애플리케이션들에서 리졸버(resolver)를 대체할 수 있다.
도 6을 참조하면, 센서 어셈블리 또는 자기 인코더(66)의 다른 실시예가 개략적으로 예시되며, 같은 컴포넌트들은 같은 번호들을 갖는다. 인코더(66)는 한줄로 배치되어 원형으로 정렬된 도 1에 도시된 극 쌍들(18a-18d)의 5개 그룹들(26)을 갖는, 회전 타깃(74)에 부착된 자기 트랙(70)을 포함한다. 인코더(66)는 또한 단일 마이크로칩(58) 상의 고해상도 센서(50) 및 기준 센서(54)를 포함하고, 센서들(50, 54)과 통신하는 논리 모듈(62)을 포함한다. 인코더(66)는 회전 타깃(74)에 부착된 전용의, 단일 극 쌍 자기 트랙(78)과 트랙들(70, 78)의 회전축에 대해서 120도 간격들로 구분되는 3개의 홀-효과 센서들(82a-82c)을 더 포함한다. 센서들(82a-82c) 각각은 트랙(70)의 개별 극 쌍들 사이에서 극 접합들을 검출함으로써 "온" 및 "오프" 스위치된다. 그러므로, 각 센서(82a-82c)는 자기 트랙(70)의 180도 회전에 대해 턴 "온"되고, 각 센서(82a-82c)는 자기 트랙(70)의 180도 회전에 대해 턴 "오프"되며, 그에 의해 도 5에 도시된 통신 신호들과 유사한 신호들이 출력된다. 그 결과, 3개의 홀-효과 센서들(82a-82c)은 각각이 자기 트랙(70)의 일부를 포함하는 6개의 다른 윈도우들 또는 회전 위치들을 결정할 수 있다.
인코더(66)의 동작에 있어서, 분리된 홀-효과 센서들(82a-82c), 고해상도 센서(50), 및 기준 센서(54)의 출력은 회전 타깃(74)의 완전한 회전을 통해서 자기 트랙(70)의 절대 위치를 결정하는 데 사용될 수 있다(즉, "최대(full-on)" 절대 위치). 자기 트랙(70)은 5개의 극 쌍 그룹들(26)을 연결한 결과로서 해상도 또는 카운트 위치들의 총수 = 3200(즉, 5개 그룹들 × 4개 극 쌍/그룹 × 160 카운트/극 쌍)을 포함한다. 주어진 예에서, 논리 모듈(62)은 고해상도 센서(50)를 사용하는 자기 트랙(70)의 고해상도 부분에서 상대적인 카운트 위치 또는 카운트 값을 기록하거나 획득한다. 다음으로, 획득한 카운트 값은 전술한 프로세스를 이용하여 로컬 극 쌍 그룹들(26) 중 한 그룹 내에서 절대 위치를 계산하는 데 사용된다. 동시에, 고해상도 센서(50)를 이용하여 카운트 값이 획득되고, 논리 모듈(62)은 홀-효과 센서들(82a-82c)의 특정한 논리 상태(즉, 표 2의 위치들(1-6) 중 하나에 대응하는 논리 상태)를 획득한다. 다음으로, 논리 모듈(62)은 자기 트랙(70) 내의 특정한 극 쌍 그룹(26)의 상대적인 위치를 결정하기 위해서 획득된 위치 번호 또는 윈도우를 고해상도 센서(50)에 의해 획득된 카운트 값을 포함하는 특정한 극 쌍 그룹(26)과 연관시킬 수 있다. 5개 그룹들(26) 중 어느 그룹이 고해상도 센서(50)에 의해 획득된 카운트 값을 포함하는 지를 앎으로서, 논리 모듈(62)은 특정한 극 쌍 그룹(26) 내의 계산된 국부적 절대 위치 및 자기 트랙(70) 내의 특정한 그룹(26)의 상대 위치를 이용하여 자기 트랙(70) 상의 절대 위치 번호를 계산할 수 있다. 예를 들어, 논리 모듈(62)이 트랙(70)의 국부적 절대 위치를 계산한다면, (각 그룹(26)에서 640개의 총 카운트 위치들 중) 400과 같고, 논리 모듈(62)은 검출된 위치 번호(즉, 위치들(1-6) 중 하나)를 극 쌍들의 제4 그룹(26)과 연관시킨 후, 자기 트랙(70)의 절대 위치가 다음과 같이 계산될 수 있다: 기준 센서(54)의 왼쪽에 있는 3개 그룹들 × 640 카운트/그룹 + 400 카운트 = 2320이며, 자기 트랙(70) 상의 3200 총 카운트 위치들 중 하나이다.
도 7을 참조하면, 센서 어셈블리 또는 자기 인코더(86)의 또 다른 실시예가 개략적으로 도시되며, 같은 컴포넌트들은 같은 참조 번호들을 갖는다. 인코더(86)는 복수의 N/S극 쌍들(94a-94i)을 갖는 자기 트랙(90)을 포함한다. 자기 트랙(90)은 명확성을 위해서 선형 배치로 개략적으로 예시되지만, 인코더(86)는 자기 트랙(90)이 탑재되는 회전 타깃(98)을 포함하는 회전 인코더로 구성된다. 이러한 구성에서, 자기 트랙(90)은 원형이며 회전 타깃(98)의 회전 축과 중심이 같을 것이다. 그러나, 본 발명의 인코더(86)는 대안으로, 회전 인코더(86)에 대해서 본 명세서에 기술된 바와 같이 실질적으로 유사한 구조 및 작동 방법을 포함하는 선형 인코더로서 구성될 수 있다.
계속 도 7을 참조하면, 자기 트랙(90)의 일부만이 도시되어 있다. 구체적으로, 자기 트랙(90)의 예시된 부분은 9개의 극 쌍들(94a-94i)의 그룹(100)을 포함하고, 이들 각각은 개별 극 쌍들(94a-94i) 내에서 각각의 N/S극들을 분리하는 극 접합(102)을 포함한다. 극 접합들(102) 각각은 자기 트랙(90)의 고해상도 부분(110)에 대응하는 고해상도 세그먼트(106) 및 자기 트랙(90)의 기준 부분(118)에 대응하는 기준 세그먼트(114a-114c)로 나뉜다. 그러나, 도 1에 예시된 자기 트랙(14)과 달리, 자기 트랙(90) 내의 극 접합들(102) 중 몇몇은 일직선이어서, 일직선 극 접합들(102) 각각에 있는 기준 세그먼트(114a)는 동일한 극 접합(102)의 고해상도 세그먼트(106)와 나란히 정렬되는 한편, 자기 트랙(90) 내의 다른 극 접합들(102)은 살짝 밀리거나 계단 모양이 되어, 살짝 밀린 극 접합들(102) 각각에 있는 기준 세그먼트(114b, 114c)는 동일한 극 접합(102)의 고해상도 세그먼트(106)로부터 오프셋된다. 인접한 극 접합들(102)의 고해상도 세그먼트들(106)은 서로 균일하게 간격을 두고 있는 한편, 인접한 극 접합들(102)의 기준 세그먼트들(114a-114c)은 인접한 기준 세그먼트들(114a-114c)의 오프셋(또는 오프셋 없는) 방향에 따라 균일하지 않게 간격을 둘 수 있다.
도 7을 참조하면, 몇몇 극 접합들(102)은 동일한 극 접합(102)의 고해상도 세그먼트(106)의 오른쪽으로 오프셋된 기준 세그먼트(114b)(즉, 오른쪽-오프셋 기준 세그먼트(114b))를 포함하고, 몇몇 극 접합들(102)은 동일한 극 접합(102)의 고해상도 세그먼트(106)의 왼쪽으로 오프셋된 기준 세그먼트(114c)(즉, 왼쪽-오프셋 기준 세그먼트(114c))를 포함하는 한편, 다른 극 접합들(102)은 일직선이며 동일한 극 접합(102)의 고해상도 세그먼트(106)와 나란히 정렬되는 기준 세그먼트(114a)(즉, 제로-오프셋 기준 세그먼트(114a))를 포함한다. 기준 세그먼트들(114a-114c)은 그룹(100) 내의 각각의 극 쌍(94a-94i)에 대한 상태들(예를 들어, 오른쪽-오프셋, 왼쪽-오프셋 또는 제로-오프셋 중 어느 하나)의 고유한 조합 또는 시퀀스를 제공하기 위해서 인접한 자극 쌍들(94a-94i)의 그룹(100) 내에 배열될 수 있다. 그 결과, 특정한 극 쌍(94a-94i)은 인접한 기준 세그먼트들(114a-114c)의 관련된 고유한 조합과 이것을 매칭시킴으로써 확인될 수 있다. 이러한 "3-상태" 논리를 이용하여(즉, 제로-오프셋, 오른쪽-오프셋 및 왼쪽-오프셋 기준 세그먼트들(114a-114c)을 이용하여), 도 7에 예시된 9개의 인접한 극 쌍들(94a-94i)은 아래 표 3에 따라서 고유하게 확인될 수 있으며, 여기서 "0"는 제로-오프셋 기준 세그먼트(114a)를 나타내고, "R"은 오른쪽-오프셋 기준 세그먼트(114b)를 나타내고, "L"은 왼쪽-오프셋 기준 세그먼트(114c)를 나타낸다.
| 극 접합들 |
극 쌍들 | ||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | |
| N/S | 0 | 0 | 0 | L | L | L | R | R | R |
| S/N | 0 | L | R | 0 | L | R | 0 | L | R |
N/S 극 접합은 특정한 극 쌍(94a-94i) 내에서 N 및 S극들 사이의 극 접합(102)인 반면, S/N 극 접합은 인접한 극 쌍들(94a-94i)의 S 및 N극 사이의 극 접합(102)이다. 이하 더욱 상세히 설명되는 바와 같이, 자기 인코더(86)는 극 쌍들(94a-94i) 내에서 개별 극들을 분리하는 인접한 제로-오프셋, 오른쪽-오프셋 및 왼쪽-오프셋 기준 세그먼트들(114a-114c)의 고유한 조합을 인식함으로써 9개의 자극 쌍들(94a-94i)의 그룹(100) 내에서 자기 트랙(90)의 절대 위치를 국부적으로 결정하도록 동작가능하다.
계속 도 7을 참조하면, 자기 인코더(86)는 또한 트랙(90)의 고해상도 부분(110)에 근접한 제1 또는 고해상도 자기 센서(50), 트랙(90)의 기준 부분(118)에 근접한 제2 자기 센서(54), 및 센서들(50, 54)과 통신하는 논리 모듈(62)을 포함한다. 이하 더욱 상세히 논의되는 바와 같이, 논리 모듈(62)은 센서들(50, 54)에 의해 각각 검출된 고해상도 및 기준 신호들을 수신하고, 신호들을 분석하고, 9개 극 쌍들(94a-94i)의 그룹(100) 내의 자기 트랙(90)의 국부적 절대 위치를 계산하도록 동작가능하므로, 회전 타깃(98)의 국부적 절대 위치를 인코더(86)가 사용되는 시스템 내의 다른 제어기(예를 들어 모터 제어기)에 출력하도록 동작가능하다.
당업자들에게 이해되는 바와 같이, 고해상도 센서(50)는 자기 트랙(90)의 회전당 총 카운트 수 또는 에지들을 산출하기 위해서 특정한 해상도(즉, 극 쌍 당 "카운트들" 또는 "에지들")로 구성될 수 있다. 예를 들어, 고해상도 센서(50)는 160 카운트/극 쌍의 해상도를 갖고 구성될 수 있으므로, 자기 트랙(90)이 도 7에 도시된 9개 극 쌍들(94a-94i)의 그룹(100)을 통해 회전함에 따라 총 1440 카운트가 검출될 수 있다. 그러나, 전술한 바와 같이, 자기 트랙(90)의 일부만이 도 7에 도시되어 있다. 인코더(86)의 전형적인 애플리케이션은 자기 트랙(90) 상에 9개 극 쌍들(94a-94i)보다 많이 필요로 할 수 있다. 이러한 경우에, 도 7에 도시된 9개 극 쌍들(94a-94i)의 그룹(100)은 필요한 9개 극 쌍들을 산출하기 위해서 자기 트랙(90)의 원주 길이 주변에서 2번 이상 반복될 것이다. 따라서, 자기 트랙(90)의 절대 위치는, 도 7에 도시되고 표 3에서 설명된 인접한 제로-오프셋, 오른쪽-오프셋 및 왼쪽-오프셋 기준 세그먼트들(114a-114c)의 고유한 조합을 이용하여 자기 트랙(90)이 첨부된 회전 타깃(98)의 소분할(fractional) 회전(즉, 1/2 회전, 1/3 회전, 1/4 회전, 등) 내에서 국부적으로 결정될 수 있다.
인코더(86)의 동작 중에, 일반적으로 센서들(50, 54) 각각의 사인 곡선 출력은 논리 모듈(62)로 입력되어, 센서들(50, 54) 각각의 사인 곡선 출력을 비교하고 기준 센서(54)의 사인 곡선 출력의 위상이 고해상도 센서(50)의 사인 곡선 출력을 앞서는지 또는 고해상도 센서(50)의 사인 곡선 출력에 뒤처지는지 또는 고해상도 센서(50)의 사인 곡선 출력과 동일 위상인지를 결정한다. 논리 모듈(62)은 기준 센서(54)의 개별 홀 소자들의 사인 곡선 출력을 고해상도 센서(50)의 개별 홀 소자들의 사인 곡선 출력과 각각 비교할 수 있다. 대안으로, 논리 모듈(62)은 기준 센서(54)의 홀 소자들의 그룹 출력의 롤링 평균(예를 들어, 4)을 고해상도 센서(50)의 홀 소자들의 그룹 출력의 롤링 평균과 비교할 수 있다. 각각의 센서들(50, 54)에서 홀 소자들의 그룹들은 각각의 센서들(50, 54)에서 연속하거나 또는 인접한 홀 소자들을 포함할 수 있다. 대안으로, 각각의 센서들(50, 54)에서 홀 소자들의 그룹들은 각각의 센서들(50, 54)에서 연속하지 않거나 또는 인접하지 않은 홀 소자들을 포함할 수 있다.
바꾸어 말하면, 논리 모듈(62)은 기준 센서(54)가 왼쪽-오프셋 기준 세그먼트(114c)에 근접하여 배치되는지(즉, 기준 센서(54)의 사인 곡선 출력이 고해상도 센서(50)의 사인 곡선 출력을 앞서는 경우)를, 기준 센서(54)가 오른쪽-오프셋 기준 세그먼트(114b)에 근접하여 배치되는지(즉, 기준 센서(54)의 사인 곡선 출력이 고해상도 센서(50)의 사인 곡선 출력에 뒤처지는 경우)를, 또는 기준 센서(54)가 제로-오프셋 기준 세그먼트(114a)에 근접하여 배치되는지(즉, 기준 센서(54)의 사인 곡선 출력이 고해상도 센서(50)의 사인 곡선 출력과 동위상인 경우)를 결정하도록 동작가능하다. 기준 센서(54)가 자기 트랙(90) 상의 적어도 하나의 N/S 극 접합(102)과 적어도 하나의 S/N 극 접합(102) 사이의 거리에 걸치기 때문에, 논리 모듈(62)은 기준 센서(54)에 의해 검출된 N/S 및 S/N 극 접합(102)의 특정한 조합을 도 7에 도시한 9개 극 쌍들(94a-94i)의 그룹(100) 내의 자극 쌍들(94a-94i) 중 하나와 관련시키도록 동작가능하다. 인코더(86)는 자기 트랙(90)이 기준 센서(54)에 대해서 회전하거나 또는 고정될 때 이러한 방식으로 동작가능하다는 점을 이해하여야 한다.
계속 도 7을 참조하면, 자기 트랙(90)은 기준 센서(54)가 제5 극 쌍(94e)의 N/S 극 접합(102)과 제5 및 제6 극 쌍들(94e, 94f) 사이의 S/N 극 접합(102)에 걸치는 위치에서 회전되어 도시된다. 이 점에서, 논리 모듈(62)은 전술한 바와 같이, 기준 센서(54)와 고해상도 센서(50)의 사인 곡선 출력들의 위상차를 비교함으로써 제5 극 쌍(94e)의 N/S 극 접합(102)과 관련된 왼쪽-오프셋 기준 세그먼트(114c)와 제5 및 제6 극 쌍들(94e, 94f) 사이의 S/N 극 접합(102)과 관련된 왼쪽-오프셋 기준 세그먼트(114c)를 인식함으로써 9개 극 쌍들(94a-94i)의 그룹(100) 내의 자기 트랙(90)의 절대 위치를 국부적으로 결정할 수 있다. 다음으로, 논리 모듈(62)은 제5 극 쌍(94e)만이 왼쪽-오프셋 및 왼쪽-오프셋 기준 세그먼트들(114c)의 검출된 조합을 포함한다는 점을 알게 되도록 표 3과 유사한 검색 표를 참조할 것이며, 4개의 완전한 극 쌍들(즉, 극 쌍들(94a-94d))은 기준 센서(54)의 왼쪽에 있고, 기준 센서(54)는 제5 극 쌍(94e)에 근접하여 또는 제5 극 쌍(94e)과 나란히 정렬됨을 의미한다. 다음으로, 논리 모듈(62)은 9개 극 쌍들(94a-94i)의 그룹(100) 내의 자기 트랙(90)의 국부적 절대 위치를 결정하기 위해서 다음의 계산을 행할 것이다: 기준 센서(54)의 왼쪽에 있는 4개 극 쌍들 × 160 카운트/극 쌍 + 고해상도 센서(50)에 의해 검출된 카운트들의 수. 예를 들어, 일례로 고해상도 센서(50)의 획득된 카운트 값이 70일 때, 계산된 카운트 값은 710(즉, 4 ×160 + 70)이 되고, 9개 자극 쌍들(94a-94i)의 로컬 그룹(100) 내의 센서(50)에 의해 검출될 수 있는 1440개 총 카운트 위치들 중 710번째 위치와 관련된다.
도 8을 참조하여 다른 예를 고려하면, 자기 트랙(90)은 기준 센서(54)가 제7 극 쌍(94g) 및 제8 극 쌍(94h) 사이의 S/N 극 접합(102)과 제8 극 쌍들(94h) 내의 N/S 극 접합(102)에 걸치는 위치에서 회전되어 도시된다. 이 점에서, 논리 모듈(62)은 전술한 바와 같이, 기준 센서(54)와 고해상도 센서(50)의 사인 곡선 출력들의 위상차를 비교함으로써 제7 및 제8 극 쌍들(94g, 94h) 사이의 S/N 극 접합(102)과 관련된 제로-오프셋 기준 세그먼트(114a)와 제8 극 쌍(94h) 내의 N/S 극 접합(102)과 관련된 오른쪽-오프셋 기준 세그먼트(114b)를 인식함으로써 9개 극 쌍들(94a-94i)의 로컬 그룹(100) 내의 자기 트랙(90)의 절대 위치를 국부적으로 결정할 수 있다. 다음으로, 논리 모듈(62)은 제로-오프셋 및 오른쪽-오프셋 기준 세그먼트들(114a, 114b)의 검출된 조합이 제7 및 제8 극 쌍들(94g, 94h) 사이 어딘가에 기준 센서(54)를 위치시킨다는 점을 알게 되도록 표 3과 유사한 검색 표를 참조할 것이다. 다음으로, 논리 모듈(62)은 고해상도 센서(50)에 의해 획득된 카운트 값을 고려해 볼 것이다. 획득된 카운트 값이 81과 160 사이에 있다면, 국부적 절대 위치는 제7 극 쌍(94g) 내의 어딘가이다. 그러나, 획득된 카운트 값이 1과 80 사이에 있다면, 국부적 절대 위치는 제8 극 쌍(94h) 내의 어딘가이다. 고해상도 센서(50)의 카운트 값=30에 대해서, 논리 모듈(62)은 9개 극 쌍들(94a-94i)의 로컬 그룹(100) 내의 절대 위치를 결정하기 위해서 다음의 계산을 행할 것이다: 기준 센서(54)의 왼쪽에 있는 7개 극 쌍 × 160 카운트/극 쌍 + 30 = 1150이고, 9개 자극 쌍들(94a-94i)의 로컬 그룹(100) 내의 센서(50)에 의해 검출될 수 있는 1440개 총 카운트 위치들 중 1150번째 위치와 관련된다. 고해상도 센서(50)의 카운트 값=130에 대해서, 논리 모듈(62)은 9개 극 쌍들(94a-94i)의 로컬 그룹(100) 내의 절대 위치를 결정하기 위해서 다음의 계산을 행할 것이다: 기준 센서(54)의 왼쪽에 있는 6개 극 쌍들 × 160 카운트/극 쌍 + 130 = 1090이고, 9개 자극 쌍들(94a-94i)의 로컬 그룹(100) 내의 센서(50)에 의해 검출될 수 있는 1440개 총 카운트 위치들 중 1090번째 위치와 관련된다.
도 7의 인코더(86)는 도 1의 인코더(10)와 유사한 방식으로 U, V, W 통신 신호들을 생성하는 데 사용될 수 있다. 인코더(86)는 또한 9개 극 쌍들(94a-94i)의 단일 그룹(100)이 회전 타깃(98)의 완전한 회전에 걸친다면 회전 타깃(98)의 완전한 회전에 걸친 자기 트랙(90)의 절대 위치를 결정하는 데 사용될 수 있다. 이러한 상황에서, 계산된 카운트 위치는 9개 극 쌍들(94a-94i)의 그룹(100) 내의 국부적 절대 위치를 나타낼 뿐만 아니라, 회전 타깃(98)의 완전한 회전을 통한 자기 트랙(90)의 절대 위치를 나타낸다.
대안으로, 인코더(86)는 한줄로 배치되어 원형으로 정렬된 도 7에 도시된 극 쌍들(94a-94i)의 5개 그룹들(100)을 갖는, 회전 타깃에 부착된 자기 트랙(도시되지 않음)을 포함할 수 있다. 인코더(86)는 또한 도 6의 인코더(66)와 유사한 방식으로, 회전 타깃에 부착된 전용의, 단일 극 쌍 자기 트랙과 트랙들의 회전축에 대해서 120도 간격들로 구분되는 3개의 홀-효과 센서들을 포함할 수 있다. 분리된 홀-효과 센서들, 고해상도 센서(50), 및 기준 센서(54)의 출력은 도 6의 인코더(66)와 유사한 방식으로 회전 타깃의 완전한 회전을 통해서 자기 트랙의 절대 위치를 결정하는 데 사용될 수 있다. 자기 트랙은 5개의 극 쌍 그룹들(100)을 연결한 결과로서 해상도 또는 카운트 위치들의 총수 = 7200(즉, 5개 그룹들 × 9개 극 쌍/그룹 × 160 카운트/극 쌍)을 포함할 것이다.
도 9를 참조하면, 본 발명의 센서 어셈블리 또는 자기 인코더(122)의 다른 실시예는 "4-상태" 로직을 이용하여 구성될 수 있으며, 그에 의해 각 그룹 내 극 쌍들의 수는 16까지 증가하므로, 추가 홀-효과 센서들(예를 들어, 도 6의 센서들(82a-82c)) 및 개별 단일 극쌍 자기 트랙(78)(예를 들어, 도 6의 트랙)은 총 16개 극쌍들을 갖는 자기 트랙의 절대 위치를 결정하는 데 필요하지 않다. 도 9는 동일한 극 접합(138)에서 고해상도 세그먼트(134)로부터 치수(D)만큼 간격을 둔 오른쪽-오프셋 기준 세그먼트(130) 및 동일한 극 접합(138)에서 고해상도 세그먼트(134)로부터 치수(D/2)만큼 간격을 둔 오른쪽-오프셋 기준 세그먼트들(142)를 포함하는 인코더(122)의 자기 트랙(126)의 일부를 예시한다. 동일한 방식으로, 트랙(126)은 동일한 극 접합(138)에서 고해상도 세그먼트(134)로부터 치수(D)만큼 간격을 둔 왼쪽-오프셋 기준 세그먼트(146) 및 동일한 극 접합(138)에서 고해상도 세그먼트(134)로부터 치수(D/2)만큼 간격을 둔 왼쪽-오프셋 기준 세그먼트들(150)를 포함한다. 그러므로, 논리 모듈(62)은 로컬 그룹 내의 극 쌍들의 수를 9에서 25까지 증가시키기 위해서 D 및 D/2 간격을 갖는 기준 세그먼트들(130, 142, 146, 150) 사이에서 차이를 인식하도록 구성될 수 있다. 인코더(122)는 대안으로, 도 9에 도시된 예시된 오프셋 극 접합들 외에 일직선 극 접합을 포함함으로써 "5-상태" 논리를 이용하여 구성될 수 있으므로, 각 그룹 내의 극 쌍들의 수를 25까지 증가시킨다.
본 발명의 다양한 특징들은 다음의 특허청구범위에서 제시된다.
Claims (21)
- 센서 어셈블리로서,
복수의 극 접합(pole junction)들에 의해 분리된 복수의 자극(magnetic pole)들을 포함하는 자기 트랙(magnetic track),
상기 자기 트랙의 고해상도 부분에 근접하여 배치된 제1 자기 센서, 및
상기 자기 트랙의 기준 부분(reference portion)에 근접하여 배치된 제2 자기 센서 - 상기 제2 자기 센서는 상기 자기 트랙 상의 인접한 극 접합들에 걸쳐짐(spanning) -
를 포함하고,
상기 인접한 극 접합들 각각은 상기 자기 트랙의 상기 고해상도 부분에 대응하는 고해상도 세그먼트, 및 상기 자기 트랙의 상기 기준 부분에 대응하는 기준 세그먼트를 포함하고, 각각의 극 접합의 기준 세그먼트는 각각의 극 접합에서 대응하는 고해상도 세그먼트와 정렬되거나 오프셋되는 센서 어셈블리. - 제1항에 있어서,
상기 제1 자기 센서 및 제2 자기 센서 중 적어도 하나는 마이크로칩(microchip) 상에서 지지되는(supported) 홀 스트링 멀티플라잉 센서(Hall string multiplying sensor)인 센서 어셈블리. - 제2항에 있어서,
상기 제1 자기 센서 및 제2 자기 센서는 동일한 상기 마이크로칩 상에서 지지되는 홀 스트링 멀티플라잉 센서들로서 구성되는 센서 어셈블리. - 제1항에 있어서,
상기 제1 자기 센서 및 제2 자기 센서 각각은 적어도 4개의 홀 센싱 소자들의 어레이를 포함하는 센서 어셈블리. - 제1항에 있어서,
상기 인접한 극 접합들 중 하나의 극 접합의 기준 세그먼트는 동일한 극 접합의 고해상도 세그먼트로부터 제1 방향으로 오프셋되는 센서 어셈블리. - 제5항에 있어서,
상기 인접한 극 접합들 중 다른 하나의 극 접합의 기준 세그먼트는 동일한 극 접합의 고해상도 세그먼트로부터 상기 제1 방향으로 오프셋되는 센서 어셈블리. - 제5항에 있어서,
상기 인접한 극 접합들 중 다른 하나의 극 접합의 기준 세그먼트는 동일한 극 접합의 고해상도 세그먼트로부터 상기 제1 방향과 반대인 제2 방향으로 오프셋되는 센서 어셈블리. - 제5항에 있어서,
상기 인접한 극 접합들 중 다른 하나의 극 접합의 기준 세그먼트는 동일한 극 접합의 고해상도 세그먼트와 정렬되는 센서 어셈블리. - 제1항에 있어서,
상기 인접한 극 접합들 중 하나의 극 접합의 기준 세그먼트는 동일한 극 접합의 고해상도 세그먼트로부터 제1 방향으로 제1 양만큼 오프셋되고, 상기 인접한 극 접합들 중 다른 하나의 극 접합의 기준 세그먼트는 동일한 극 접합의 고해상도 세그먼트로부터 상기 제1 방향으로 상기 제1 양과 다른 제2 양만큼 오프셋되는 센서 어셈블리. - 제1항에 있어서,
상기 제1 자기 센서 및 제2 자기 센서와 통신하는 논리 모듈을 더 포함하는 센서 어셈블리. - 제1항에 있어서,
상기 복수의 자극들 및 극 접합들은 적어도 4개 자극 쌍들을 정의하고, 상기 자기 트랙 상의 각각의 극 접합의 기준 세그먼트는 동일한 극 접합의 고해상도 세그먼트로부터 오프셋되는 센서 어셈블리. - 제1항에 있어서,
상기 복수의 자극들 및 극 접합들은 적어도 9개의 자극 쌍들을 정의하고, 상기 자기 트랙 상의 적어도 하나의 극 접합의 기준 세그먼트는 동일한 극 접합의 고해상도 세그먼트로부터 제1 방향으로 오프셋되고, 상기 자기 트랙 상의 적어도 하나의 극 접합의 기준 세그먼트는 동일한 극 접합의 고해상도 세그먼트로부터 상기 제1 방향과 반대인 제2 방향으로 오프셋되며, 상기 자기 트랙 상의 적어도 하나의 극 접합의 기준 세그먼트는 동일한 극 접합의 고해상도 세그먼트와 정렬되는 센서 어셈블리. - 제1항에 있어서,
단일 자극 쌍을 포함하는 제2 자기 트랙, 및
상기 제2 자기 트랙에 근접하여 위치된 복수의 홀-효과(Hall-effect) 센서들
을 더 포함하며,
상기 홀-효과 센서들은 실질적으로 균일한 간격으로 서로 떨어져 있는 센서 어셈블리. - 제13항에 있어서,
상기 복수의 자극들 및 극 접합들은 자극 쌍들의 복수의 그룹들을 정의하고, 각각의 극 쌍 그룹은 상기 극 쌍 그룹 내의 개별 극들을 분리하는 극 접합들의 동일한 고유 시퀀스를 포함하는 센서 어셈블리. - 제14항에 있어서,
각각의 극 쌍 그룹은 4개의 자극 쌍들을 포함하고, 상기 그룹 내의 인접한 극 접합들의 연속(consecutive) 쌍들은 서로 다른 센서 어셈블리. - 제14항에 있어서,
각각의 극 쌍 그룹은 9개의 자극 쌍들을 포함하고, 상기 그룹 내의 인접한 극 접합들의 연속 쌍들은 서로 다른 센서 어셈블리. - 제14항에 있어서,
각각의 극 쌍 그룹은 적어도 4개의 자극 쌍들을 포함하고, 상기 그룹 내의 인접한 극 접합들의 연속 쌍들은 서로 다른 센서 어셈블리. - 인코더의 자기 트랙 상의 위치를 판정하는 방법으로서,
상기 자기 트랙의 일부를 형성하는 자극 쌍들의 그룹을 제공하는 단계,
상기 자기 트랙의 고해상도 부분에 근접한 제1 자기 센서를 이용하여 상기 그룹에서의 제1 자극 쌍 내의 상대적 위치를 기록하는 단계,
상기 자기 트랙의 기준 부분에 근접하여 위치된 제2 자기 센서로 자극 쌍들의 상기 그룹 내에서 인접한 극 접합들을 검출하는 단계,
상기 그룹 내에서 상기 제1 자극 쌍의 상대적 위치를 판정하기 위해서 상기 인접하는 극 접합들을 상기 제1 자극 쌍과 상관(correlating)시키는 단계, 및
상기 제1 자극 쌍 내의 상대적 위치 및 상기 그룹 내의 상기 제1 자극 쌍의 상대적 위치를 이용하여 상기 그룹 내의 국부적 절대 위치를 산출하는 단계
를 포함하는 자기 트랙 상의 위치 판정 방법. - 제18항에 있어서,
상기 자극 쌍들의 그룹은 제1 그룹이고,
상기 방법은,
상기 제1 그룹과 동일한 복수의 극 쌍 그룹들을 상기 제1 그룹과 한 줄로(end to end) 정렬하는 단계
를 더 포함하는 자기 트랙 상의 위치 판정 방법. - 제19항에 있어서,
상기 자기 트랙은 제1 자기 트랙이며,
상기 방법은,
단일 자극 쌍 및 2개의 극 접합들을 포함하는 제2 자기 트랙을 제공하는 단계,
실질적으로 균일한 간격으로 서로 떨어져 있고, 상기 제2 자기 트랙에 근접하여 위치된 복수의 홀-효과 센서들을 이용하여 상기 극 접합들을 검출하는 단계, 및
상기 홀-효과 센서들의 출력을 이용하여 복수의 윈도우들을 생성하는 단계
를 더 포함하며,
각 윈도우는 상기 자기 트랙의 일부를 포함하는 자기 트랙 상의 위치 판정 방법. - 제20항에 있어서,
상기 제1 자기 트랙 내의 상기 제1 그룹의 상대적 위치를 판정하기 위해서 상기 제1 그룹의 자극 쌍들을 상기 윈도우들 중 하나의 윈도우와 상관시키는 단계, 및
상기 제1 그룹 내의 상기 산출된 국부적 절대 위치 및 상기 제1 자기 트랙 내의 상기 제1 그룹의 상대 위치를 이용하여 상기 제1 자기 트랙 상의 절대 위치를 산출하는 단계
를 더 포함하는 자기 트랙 상의 위치 판정 방법.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US16694609P | 2009-04-06 | 2009-04-06 | |
| US61/166,946 | 2009-04-06 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20120005452A true KR20120005452A (ko) | 2012-01-16 |
Family
ID=42936835
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020117023440A Withdrawn KR20120005452A (ko) | 2009-04-06 | 2010-04-02 | 센서 어셈블리 |
Country Status (4)
| Country | Link |
|---|---|
| US (2) | US8823365B2 (ko) |
| KR (1) | KR20120005452A (ko) |
| DE (1) | DE112010001531T5 (ko) |
| WO (1) | WO2010117891A2 (ko) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9644935B2 (en) | 2011-10-26 | 2017-05-09 | The Timken Company | Sensor system having independent hall effect sensor |
| CN107076806B (zh) | 2014-09-04 | 2020-09-01 | 铁姆肯公司 | 具有偏移补偿的霍尔效应传感器电路 |
| EP3032223B1 (en) * | 2014-12-09 | 2017-05-31 | National Chung Shan Institute of Science and Technology | Non-contact adjustable hysteretic magnetic encoder |
| EP3559602B1 (en) | 2016-12-23 | 2021-08-04 | The Timken Company | Absolute position sensor using hall array |
| JP6787260B2 (ja) * | 2017-06-14 | 2020-11-18 | 株式会社デンソー | ポジションセンサ |
| CN112166303B (zh) * | 2018-05-25 | 2022-07-01 | 森斯泰克有限责任公司 | 绝对值编码器 |
| US12424910B2 (en) | 2022-12-31 | 2025-09-23 | Cooper-Standard Automotive Inc. | Apparatus and method for magnetically sensing the position of a rotating device |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01297507A (ja) * | 1988-05-26 | 1989-11-30 | Hitachi Ltd | 磁気的に位置や速度を検出する装置 |
| US5568048A (en) * | 1994-12-14 | 1996-10-22 | General Motors Corporation | Three sensor rotational position and displacement detection apparatus with common mode noise rejection |
| US5898301A (en) * | 1997-04-10 | 1999-04-27 | The Torrington Company | Magnetic encoder for producing an index signal |
| FR2769088B1 (fr) * | 1997-09-26 | 1999-12-03 | Roulements Soc Nouvelle | Capteur digital de position relative |
| US6307365B1 (en) | 1999-03-12 | 2001-10-23 | The Torrington Company | Method of determining position and/or direction of a magnetic target |
| FR2792403B1 (fr) | 1999-04-14 | 2001-05-25 | Roulements Soc Nouvelle | Capteur de position et/ou de deplacement comportant une pluralite d'elements sensibles alignes |
| FR2792380B1 (fr) | 1999-04-14 | 2001-05-25 | Roulements Soc Nouvelle | Roulement pourvu d'un dispositif de detection des impulsions magnetiques issues d'un codeur, ledit dispositif comprenant plusieurs elements sensibles alignes |
| US6515471B1 (en) * | 2000-10-11 | 2003-02-04 | The Torrington Company | Absolute position hall string sensor |
| FR2845213B1 (fr) | 2002-09-27 | 2005-03-18 | Roulements Soc Nouvelle | Dispositif de pilotage d'un moteur a commutation electronique comprenant des singularites reparties angulairement |
| CN101855522B (zh) * | 2007-10-22 | 2013-01-30 | 铁姆肯公司 | 具有二进制和十进制输出的绝对位置磁编码器 |
-
2010
- 2010-04-02 KR KR1020117023440A patent/KR20120005452A/ko not_active Withdrawn
- 2010-04-02 DE DE112010001531T patent/DE112010001531T5/de not_active Withdrawn
- 2010-04-02 US US13/259,252 patent/US8823365B2/en active Active
- 2010-04-02 WO PCT/US2010/029729 patent/WO2010117891A2/en not_active Ceased
-
2014
- 2014-07-30 US US14/446,547 patent/US9383226B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US8823365B2 (en) | 2014-09-02 |
| US9383226B2 (en) | 2016-07-05 |
| US20120019234A1 (en) | 2012-01-26 |
| WO2010117891A2 (en) | 2010-10-14 |
| WO2010117891A3 (en) | 2011-05-26 |
| US20140340077A1 (en) | 2014-11-20 |
| DE112010001531T5 (de) | 2012-07-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20120005452A (ko) | 센서 어셈블리 | |
| CN101855522B (zh) | 具有二进制和十进制输出的绝对位置磁编码器 | |
| US7915886B2 (en) | Magnetic speed, direction, and/or movement extent sensor | |
| KR101378731B1 (ko) | 인코더신호처리방법 | |
| KR101737765B1 (ko) | 가동체의 이중적인 절대 위치 결정을 위한 장치 및 방법 | |
| CN103322896B (zh) | 一种无刷直流电机霍尔传感器安装位置检测方法及系统 | |
| US7834616B2 (en) | Magnetic speed, direction, and/or movement extent sensor | |
| US20150130446A1 (en) | Magnetic Out-of-Axis Angle Sensing Principle | |
| US9316508B2 (en) | Magnetic encoder for producing an index signal | |
| EP2527796A2 (en) | Capacitive rotary encoder and method for sensing a rotation angle | |
| US20220381800A1 (en) | Amr speed and direction sensor for use with magnetic targets | |
| US20170045380A1 (en) | Rotary sensing device | |
| US9989381B2 (en) | Angle sensor with magnetic patterns | |
| US11637482B2 (en) | Magnetic sensor system for motor control | |
| US7022975B2 (en) | Angular position sensor | |
| US10480963B2 (en) | Absolute position readout apparatus | |
| US8525459B2 (en) | Code disk, optical encoder, and motor system | |
| US20040061460A1 (en) | Device for controlling an electronically switched motor comprising angularly distributed singularities | |
| JP2001050774A (ja) | サインコサイン出力センサおよびこれを用いたサーボモータ | |
| KR101952049B1 (ko) | 센서 시스템을 위한 프로그램 가능한 보간 모듈 | |
| CN106030249A (zh) | 门的位置的检测 | |
| KR20170001149A (ko) | 위치 감지 센서 및 위치 감지 센서 조립체 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
Patent event date: 20111005 Patent event code: PA01051R01D Comment text: International Patent Application |
|
| PG1501 | Laying open of application | ||
| PC1203 | Withdrawal of no request for examination | ||
| WITN | Application deemed withdrawn, e.g. because no request for examination was filed or no examination fee was paid |