KR20120008518A - 디지탈 이미징 시스템, 플레놉틱 광학기구 및 이미지 데이타 처리방법 - Google Patents
디지탈 이미징 시스템, 플레놉틱 광학기구 및 이미지 데이타 처리방법 Download PDFInfo
- Publication number
- KR20120008518A KR20120008518A KR1020117026075A KR20117026075A KR20120008518A KR 20120008518 A KR20120008518 A KR 20120008518A KR 1020117026075 A KR1020117026075 A KR 1020117026075A KR 20117026075 A KR20117026075 A KR 20117026075A KR 20120008518 A KR20120008518 A KR 20120008518A
- Authority
- KR
- South Korea
- Prior art keywords
- microlenses
- microlens
- image
- array
- plane
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






















Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/95—Computational photography systems, e.g. light-field imaging systems
- H04N23/957—Light-field or plenoptic cameras or camera modules
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/0075—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00 with means for altering, e.g. increasing, the depth of field or depth of focus
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B3/00—Simple or compound lenses
- G02B3/0006—Arrays
- G02B3/0037—Arrays characterized by the distribution or form of lenses
- G02B3/0056—Arrays characterized by the distribution or form of lenses arranged along two different directions in a plane, e.g. honeycomb arrangement of lenses
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/20—Image signal generators
- H04N13/204—Image signal generators using stereoscopic image cameras
- H04N13/207—Image signal generators using stereoscopic image cameras using a single two-dimensional [2D] image sensor
- H04N13/232—Image signal generators using stereoscopic image cameras using a single two-dimensional [2D] image sensor using fly-eye lenses, e.g. arrangements of circular lenses
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/50—Constructional details
- H04N23/55—Optical parts specially adapted for electronic image sensors; Mounting thereof
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Optics & Photonics (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Computing Systems (AREA)
- Theoretical Computer Science (AREA)
- Studio Devices (AREA)
- Image Processing (AREA)
- Testing, Inspecting, Measuring Of Stereoscopic Televisions And Televisions (AREA)
- Optical Communication System (AREA)
- Microscoopes, Condenser (AREA)
- Holo Graphy (AREA)
Abstract
Description
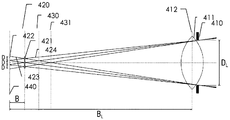
도3 및 4는 본 발명에 따른 다초점 플레놉틱 카메라의 개략 예시도.
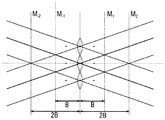
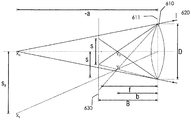
도5 내지 도10은 본 발명이 기초로 하는 이론적 방법론의 개략 예시도.
도11 내지 도15는 본 발명과 종래기술의 유효 분해능의 도표.
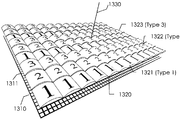
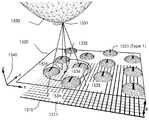
도16 내지 도19는 본 발명에 따른 다초점 플레놉틱 카메라의 특징들을 예시하는 개략 사시도.
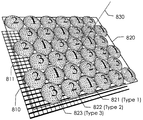
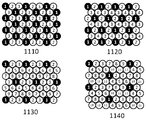
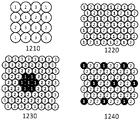
도20 내지 도27은 마이크로렌즈 구성의 개략 예시도.
도28은 광축을 따라 두개의 마이크로렌즈 어레이를 이용하는 플레놉틱 카메라의 개략 실예도.
도29 내지 도31은 본 발명에 따른 이미지 데이타 처리방법의 개략 예시도.

































Claims (20)
- 플레놉틱 광학 기구의 이미지를 합성하기 위한 구조를 갖는 디지탈 이미징 시스템이,
미리 정해진 이미지 평면에 배열된 다수의 광센서들을 포함하는 광센서 어레이; 및
피사체로부터 상기 광센서 어레이까지 광을 검출하기 위해 배열된 다수의 마이크로렌즈들을 포함하는 마이크로렌즈 어레이;를 포함하고,
상기 광센서 어레이 및 마이크로렌즈 어레이는 미리 정해진 거리로 배열되며,
상기 마이크로렌즈들은 마이크로렌즈 어레이에 걸쳐 변경된 상이한 초점 길이들을 가지며, 그리고
상기 광센서 어레이의 이미지 평면은 상기 광센서 어레이와 마이크로렌즈 어레이 사이의 거리가 마이크로렌즈들의 초점 길이와 동일하지 않는 방도로 배열된 것을 특징으로 하는 디지탈 이미징 시스템.
- 제1항에 있어서,
상기 마이크로렌즈 어레이는 공동 초점 길이를 가지는 마이크로렌즈 그룹을 포함하고, 서로 상이한 그룹의 마이크로렌즈는 서로 상이한 초점 길이를 가지는 것을 특징으로 하는 디지탈 이미징 시스템.
- 제1항 또는 제2항에 있어서,
상기 각 마이크로렌즈의 초점 길이는 두개 또는 세개의 상이한 초점 길이로부터 선택되는 것을 특징으로 하는 디지탈 이미징 시스템.
- 제1항 또는 제2항에 있어서,
상기 각 마이크로렌즈의 초점 길이는 세개 이상의 상이한 초점 길이로부터 선택되는 것을 특징으로 하는 디지탈 이미징 시스템.
- 전술한 항들 중 어느 한 항에 있어서,
상기 각 마이크로렌즈의 초점 길이는 최근접하여 이웃하는 각 마이크로렌즈의 초점 길이와는 다른 것을 특징으로 하는 디지탈 이미징 시스템.
- 전술한 항들 중 어느 한 항에 있어서,
각 마이크로렌즈가 각 마이크로렌즈의 초점 길이 및 마이크로렌즈 어레이로부터의 깊이 거리에 좌우되는 유효 분해능 비를 제공하고, 그리고
각 마이크로렌즈의 초점 길이들은 상기 유효 분해능 비가 깊이 거리의 인접 영역에서 상호 보완적인 최대값을 가지는 방도로 선택된 것을 특징으로 하는 디지탈 이미징 시스템.
- 전술한 항들 중 어느 한 항에 있어서,
상기 마이크로렌즈들은 동일한 초점 길이를 가지는 마이크로렌즈들이 규칙적인 그리드를 제공하는 방도로 배열된 것을 특징으로 하는 디지탈 이미징 시스템.
- 전술한 항들 중 어느 한 항에 있어서,
상기 마이크로렌즈들은 동일한 초점 길이를 가지는 마이크로렌즈들이 직각형 또는 육각형 그리드를 제공하는 방도로 배열된 것을 특징으로 하는 디지탈 이미징 시스템.
- 전술한 항들 중 어느 한 항에 있어서,
상기 광센서 어레이와 마이크로렌즈 어레이 사이의 거리는 광센서 어레이와 마이크로렌즈 어레이의 가변형 또는 고정형 접속부를 포함하는 제어구성부에 의해 세팅된 것을 특징으로 하는 디지탈 이미징 시스템.
- 전술한 항들 중 어느 한 항에 있어서,
상기 마이크로렌즈 어레이는 1 또는 2-차원적 마이크로렌즈 어레이인 것을 특징으로 하는 디지탈 이미징 시스템.
- 전술한 항들 중 어느 한 항에 있어서,
공동 초점 길이를 가지는 모든 마이크로렌즈들은 동일한 직경을 가지는 것을 특징으로 하는 디지탈 이미징 시스템.
- 전술한 항들 중 어느 한 항에 있어서,
마이크로렌즈 어레이의 모든 마이크로렌즈들은 동일한 직경을 가지는 것을 특징으로 하는 디지탈 이미징 시스템.
- 전술한 항들 중 어느 한 항에 있어서,
피사체로부터 상기 마이크로렌즈 어레이까지 광을 검출하기 위해 배열된 다수의 마이크로렌즈들을 포함하는 마이크로렌즈 어레이를 포함하는 적어도 하나의 보조 마이크로렌즈 어레이를 포함하는 것을 특징으로 하는 디지탈 이미징 시스템.
- 전술한 항들 중 어느 한 항에 있어서,
서로 상이한 광센서에서 감지된 광, 마이크로렌즈 어레이에 관한 광센서의 위치 및 상기 감지된 광의 입사각의 함수로서 합성된 이미지를 특징하는 이미지를 제공하기위해 프로그램처리가능한 컴퓨터 셋업 중에 있는 프로세서를 더 포함하는 것을 특징으로 하는 디지탈 이미징 시스템.
- 광학 메인 렌즈; 및
전술한 항들 중 어느 한 항에 따른 디지탈 이미징 시스템;을 포함하는 것을 특징으로 하는 플레놉틱 광학 기구.
- 제15항에 있어서,
상기 디지탈 이미징 시스템의 마이크로렌즈 어레이가 광학 메인 렌즈의 초점 라인에 배열되어 광이 피사체로부터 광학 메인 렌즈를 거쳐 광센서 어레이로 향하도록 하고, 그리고
상기 광학 메인 렌즈의 초점 라인의 특정 부분을 관통하는 광선 세트에 대해, 다수의 광센서들이 상이한 입사각으로 초점 라인의 특정 부분에 동시에 도달하는 상기 광선 세트의 상이한 광선들을 감지하기 위해 배열된 것을 특징으로 하는 플레놉틱 광학 기구.
- 제15항 또는 제16항에 있어서,
상기 플레놉틱 광학 기구는 카메라 기구, 스캐닝 기구 또는 현미경 기구인 것을 특징으로 하는 플레놉틱 광학 기구.
- 제1항 내지 제14항 중 어느 한 항에 따른 디지탈 이미징 시스템과 제 15항 내지 제17항 중 어느 한 항에 따른 플레놉틱 광학 기구로 수집한 이미지 데이타를 처리하기 위한 방법이,
광센서로 수집한 초기 이미지 데이타를 제공하는 단계;
허상 포인트들을 포함하는 미리 정해진 허상 표면을 제공하는 단계;
각 허상 포인트를 위해,
광센서 어레이 상의 허상 포인트를 이미징하기 위한 최대 유효 분해능을 가지는 것으로 그의 초점 길이에 좌우되는 마이크로렌즈 그룹을 선택하고,
마이크로렌즈 어레이 평면상에 상기 허상 포인트를 투사하고,
상기 허상 포인트의 강도 값에 기여하는 상기 선택된 마이크로렌즈 그룹의 마이크로 이미지를 검출하고,
초기 이미지 데이타가 허상 포인트의 강도 값에 기여하는 초기 이미지 포인트들을 선택하고, 그리고
상기 초기 이미지 포인트에서의 초기 이미지 데이타의 평균 초기 이미지 강도를 검출하는 단계; 및
상기 평균 초기 이미지 강도를 포함하는 디지탈 이미지를 발생시키는 단계;를 포함하는 것을 특징으로 하는 이미지 데이타 처리 방법.
- 제18항에 있어서,
상기 허상 표면은 허상 평면 또는 이미지될 피사체의 표면에 적응된 표면인 것을 특징으로 하는 이미지 데이타 처리 방법.
- 제18항 또는 제19항에 있어서,
상기 디지탈 이미지를 발생시키는 단계는 다양한 허상 표면들을 위해 반복되는 것을 특징으로 하는 이미지 데이타 처리 방법.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP09005628.4 | 2009-04-22 | ||
| EP09005628A EP2244484B1 (en) | 2009-04-22 | 2009-04-22 | Digital imaging method for synthesizing an image using data recorded with a plenoptic camera |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20120008518A true KR20120008518A (ko) | 2012-01-30 |
| KR101605392B1 KR101605392B1 (ko) | 2016-03-23 |
Family
ID=41008937
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020117026075A Expired - Fee Related KR101605392B1 (ko) | 2009-04-22 | 2009-12-04 | 디지탈 이미징 시스템, 플레놉틱 광학기구 및 이미지 데이타 처리방법 |
Country Status (10)
| Country | Link |
|---|---|
| US (1) | US8619177B2 (ko) |
| EP (2) | EP2244484B1 (ko) |
| JP (1) | JP5411350B2 (ko) |
| KR (1) | KR101605392B1 (ko) |
| CN (1) | CN102439979B (ko) |
| AT (1) | ATE551841T1 (ko) |
| AU (1) | AU2009344681A1 (ko) |
| BR (1) | BRPI0925051A2 (ko) |
| CA (1) | CA2757944A1 (ko) |
| WO (1) | WO2010121637A1 (ko) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20140116615A (ko) * | 2013-03-25 | 2014-10-06 | 삼성전자주식회사 | 멀티 인테그랄 포토그래피 카메라 매칭 시스템 및 방법 |
| KR20140143858A (ko) * | 2013-06-07 | 2014-12-18 | 한양대학교 산학협력단 | 다차원 영상 획득 방법 및 다차원 영상 획득 장치 |
| KR101524827B1 (ko) * | 2013-03-20 | 2015-06-03 | 충북대학교 산학협력단 | 집적영상 카메라와 이를 이용한 홀로그램 합성 기법 |
| KR20150109187A (ko) * | 2014-03-19 | 2015-10-01 | 엘지전자 주식회사 | 구조광 시스템 |
| KR20160064592A (ko) * | 2014-11-28 | 2016-06-08 | 엘지전자 주식회사 | 마이크로 렌즈 어레이를 구비하는 광 검출 센서 |
| KR20210151474A (ko) * | 2020-06-05 | 2021-12-14 | 한국과학기술원 | 마이크로렌즈 어레이를 이용한 초박형 카메라 장치 그리고 이의 다기능 이미징 방법 |
| KR20220028118A (ko) * | 2019-08-22 | 2022-03-08 | 에이에스엠엘 네델란즈 비.브이. | 계측 디바이스 및 이를 위한 검출 장치 |
Families Citing this family (248)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10298834B2 (en) | 2006-12-01 | 2019-05-21 | Google Llc | Video refocusing |
| US8866920B2 (en) | 2008-05-20 | 2014-10-21 | Pelican Imaging Corporation | Capturing and processing of images using monolithic camera array with heterogeneous imagers |
| EP4336447B1 (en) | 2008-05-20 | 2025-05-07 | Adeia Imaging LLC | Capturing and processing of images using monolithic camera array with heterogeneous imagers |
| US11792538B2 (en) | 2008-05-20 | 2023-10-17 | Adeia Imaging Llc | Capturing and processing of images including occlusions focused on an image sensor by a lens stack array |
| WO2011063347A2 (en) | 2009-11-20 | 2011-05-26 | Pelican Imaging Corporation | Capturing and processing of images using monolithic camera array with heterogeneous imagers |
| US8749620B1 (en) | 2010-02-20 | 2014-06-10 | Lytro, Inc. | 3D light field cameras, images and files, and methods of using, operating, processing and viewing same |
| US20120012748A1 (en) | 2010-05-12 | 2012-01-19 | Pelican Imaging Corporation | Architectures for imager arrays and array cameras |
| EP2461198A3 (en) | 2010-12-01 | 2017-03-08 | BlackBerry Limited | Apparatus, and associated method, for a camera module of electronic device |
| US8878950B2 (en) | 2010-12-14 | 2014-11-04 | Pelican Imaging Corporation | Systems and methods for synthesizing high resolution images using super-resolution processes |
| US8797432B2 (en) * | 2011-01-20 | 2014-08-05 | Aptina Imaging Corporation | Imaging system with an array of image sensors |
| WO2012099034A1 (ja) * | 2011-01-21 | 2012-07-26 | 株式会社ニコン | 焦点位置維持装置及び顕微鏡 |
| US8768102B1 (en) | 2011-02-09 | 2014-07-01 | Lytro, Inc. | Downsampling light field images |
| JP5214754B2 (ja) * | 2011-02-25 | 2013-06-19 | 株式会社東芝 | 固体撮像装置および携帯情報端末 |
| JP5623313B2 (ja) * | 2011-03-10 | 2014-11-12 | キヤノン株式会社 | 撮像装置および撮像光学系 |
| TW201245768A (en) * | 2011-03-29 | 2012-11-16 | Sony Corp | Image pickup apparatus, image pickup device, image processing method, aperture control method, and program |
| JP5170276B2 (ja) * | 2011-03-31 | 2013-03-27 | カシオ計算機株式会社 | 画像再構成装置、画像再構成方法、及び画像再構成プログラム |
| ES2391185B2 (es) * | 2011-04-28 | 2013-06-19 | Universidad De La Laguna | Sistema integrado de captura, procesado y representación de imagen tridimensional. |
| FR2974669B1 (fr) * | 2011-04-28 | 2013-06-07 | Commissariat Energie Atomique | Dispositif imageur destine a evaluer des distances d'elements dans une image |
| CN107404609B (zh) | 2011-05-11 | 2020-02-11 | 快图有限公司 | 用于传送阵列照相机图像数据的方法 |
| US8531581B2 (en) * | 2011-05-23 | 2013-09-10 | Ricoh Co., Ltd. | Focusing and focus metrics for a plenoptic imaging system |
| US9184199B2 (en) | 2011-08-01 | 2015-11-10 | Lytro, Inc. | Optical assembly including plenoptic microlens array |
| JP6080417B2 (ja) * | 2011-08-19 | 2017-02-15 | キヤノン株式会社 | 画像処理装置、及び画像処理方法 |
| WO2013033442A1 (en) | 2011-08-30 | 2013-03-07 | Digimarc Corporation | Methods and arrangements for identifying objects |
| WO2013036236A1 (en) * | 2011-09-08 | 2013-03-14 | Intel Corporation | Interactive screen viewing |
| WO2013043751A1 (en) | 2011-09-19 | 2013-03-28 | Pelican Imaging Corporation | Systems and methods for controlling aliasing in images captured by an array camera for use in super resolution processing using pixel apertures |
| US9129183B2 (en) | 2011-09-28 | 2015-09-08 | Pelican Imaging Corporation | Systems and methods for encoding light field image files |
| US20130120621A1 (en) * | 2011-11-10 | 2013-05-16 | Research In Motion Limited | Apparatus and associated method for forming color camera image |
| US20130135515A1 (en) * | 2011-11-30 | 2013-05-30 | Sony Corporation | Digital imaging system |
| US8602308B2 (en) * | 2011-12-22 | 2013-12-10 | Symbol Technologies, Inc. | Imaging device having light field sensor |
| US9392260B2 (en) | 2012-01-27 | 2016-07-12 | Panasonic Intellectual Property Management Co., Ltd. | Array optical element, imaging member, imaging element, imaging device, and distance measurement device |
| EP2623964A1 (de) | 2012-02-06 | 2013-08-07 | Jürgen Kupper | Röntgengerät und Röntgenverfahren zur Untersuchung eines dreidimensionalen Untersuchungsobjekts |
| US8953012B2 (en) * | 2012-02-13 | 2015-02-10 | Raytheon Company | Multi-plenoptic system with image stacking and method for wide field-of-regard high-resolution imaging |
| US9137441B2 (en) | 2012-02-16 | 2015-09-15 | Ricoh Co., Ltd. | Spatial reconstruction of plenoptic images |
| EP2817955B1 (en) | 2012-02-21 | 2018-04-11 | FotoNation Cayman Limited | Systems and methods for the manipulation of captured light field image data |
| US8948545B2 (en) | 2012-02-28 | 2015-02-03 | Lytro, Inc. | Compensating for sensor saturation and microlens modulation during light-field image processing |
| US8995785B2 (en) | 2012-02-28 | 2015-03-31 | Lytro, Inc. | Light-field processing and analysis, camera control, and user interfaces and interaction on light-field capture devices |
| JP6112824B2 (ja) * | 2012-02-28 | 2017-04-12 | キヤノン株式会社 | 画像処理方法および装置、プログラム。 |
| US9420276B2 (en) | 2012-02-28 | 2016-08-16 | Lytro, Inc. | Calibration of light-field camera geometry via robust fitting |
| US8811769B1 (en) | 2012-02-28 | 2014-08-19 | Lytro, Inc. | Extended depth of field and variable center of perspective in light-field processing |
| US8831377B2 (en) | 2012-02-28 | 2014-09-09 | Lytro, Inc. | Compensating for variation in microlens position during light-field image processing |
| CN103312946A (zh) * | 2012-03-09 | 2013-09-18 | 亚洲光学股份有限公司 | 可选择不同追踪范围的影像追踪装置 |
| JP2013198016A (ja) * | 2012-03-21 | 2013-09-30 | Casio Comput Co Ltd | 撮像装置 |
| JP5459337B2 (ja) * | 2012-03-21 | 2014-04-02 | カシオ計算機株式会社 | 撮像装置、画像処理方法及びプログラム |
| JPWO2013161944A1 (ja) | 2012-04-25 | 2015-12-24 | 株式会社ニコン | 焦点検出装置、焦点調節装置およびカメラ |
| US9550455B2 (en) | 2012-04-25 | 2017-01-24 | Gentex Corporation | Multi-focus optical system |
| US9707892B2 (en) | 2012-04-25 | 2017-07-18 | Gentex Corporation | Multi-focus optical system |
| US9210392B2 (en) | 2012-05-01 | 2015-12-08 | Pelican Imaging Coporation | Camera modules patterned with pi filter groups |
| EP2845045B1 (en) | 2012-05-02 | 2023-07-12 | Leica Biosystems Imaging, Inc. | Real-time focusing in line scan imaging |
| HK1201391A1 (en) | 2012-05-09 | 2015-08-28 | 莱特洛公司 | Optimization of optical systems for improved light field capture and manipulation |
| DE102012104582A1 (de) * | 2012-05-29 | 2013-12-05 | Leuze Electronic Gmbh & Co. Kg | Optischer Sensor |
| JP6045208B2 (ja) * | 2012-06-13 | 2016-12-14 | オリンパス株式会社 | 撮像装置 |
| EP2677734A3 (en) * | 2012-06-18 | 2016-01-13 | Sony Mobile Communications AB | Array camera imaging system and method |
| US9858649B2 (en) | 2015-09-30 | 2018-01-02 | Lytro, Inc. | Depth-based image blurring |
| US9607424B2 (en) | 2012-06-26 | 2017-03-28 | Lytro, Inc. | Depth-assigned content for depth-enhanced pictures |
| US10129524B2 (en) | 2012-06-26 | 2018-11-13 | Google Llc | Depth-assigned content for depth-enhanced virtual reality images |
| EP2873028A4 (en) | 2012-06-28 | 2016-05-25 | Pelican Imaging Corp | SYSTEMS AND METHOD FOR DETECTING DEFECTIVE CAMERA ARRAYS, OPTICAL ARRAYS AND SENSORS |
| US20140002674A1 (en) | 2012-06-30 | 2014-01-02 | Pelican Imaging Corporation | Systems and Methods for Manufacturing Camera Modules Using Active Alignment of Lens Stack Arrays and Sensors |
| US8817167B2 (en) * | 2012-07-13 | 2014-08-26 | Google Inc. | Imaging device with a plurality of depths of field |
| US9420158B2 (en) | 2012-07-16 | 2016-08-16 | Sony Corporation | System and method for effectively implementing a lens array in an electronic device |
| WO2014024745A1 (ja) * | 2012-08-06 | 2014-02-13 | 富士フイルム株式会社 | 撮像装置 |
| JP6039301B2 (ja) * | 2012-08-09 | 2016-12-07 | キヤノン株式会社 | 撮像装置、撮像システム、撮像装置の制御方法、プログラム、および、記憶媒体 |
| IL221491A (en) * | 2012-08-15 | 2016-06-30 | Aspect Imaging Ltd | Mri apparatus combined with lightfield camera |
| KR102111181B1 (ko) | 2012-08-21 | 2020-05-15 | 포토내이션 리미티드 | 어레이 카메라를 사용하여 포착된 영상에서의 시차 검출 및 보정을 위한 시스템 및 방법 |
| US20140055632A1 (en) | 2012-08-23 | 2014-02-27 | Pelican Imaging Corporation | Feature based high resolution motion estimation from low resolution images captured using an array source |
| JP5978082B2 (ja) * | 2012-09-19 | 2016-08-24 | 日本放送協会 | 立体画像撮影装置及びその方法 |
| EP2901671A4 (en) * | 2012-09-28 | 2016-08-24 | Pelican Imaging Corp | GENERATING IMAGES FROM LIGHT FIELDS USING VIRTUAL VIEWPOINTS |
| US8997021B2 (en) | 2012-11-06 | 2015-03-31 | Lytro, Inc. | Parallax and/or three-dimensional effects for thumbnail image displays |
| AT513560A1 (de) * | 2012-11-08 | 2014-05-15 | Berndorf Band Gmbh | Vorrichtung zur Untersuchung von Oberflächen von Metallblechen |
| JP2014099696A (ja) * | 2012-11-13 | 2014-05-29 | Toshiba Corp | 固体撮像装置 |
| US9143711B2 (en) | 2012-11-13 | 2015-09-22 | Pelican Imaging Corporation | Systems and methods for array camera focal plane control |
| US9001226B1 (en) | 2012-12-04 | 2015-04-07 | Lytro, Inc. | Capturing and relighting images using multiple devices |
| US9092890B2 (en) | 2012-12-20 | 2015-07-28 | Ricoh Company, Ltd. | Occlusion-aware reconstruction of three-dimensional scenes from light field images |
| US9124762B2 (en) | 2012-12-20 | 2015-09-01 | Microsoft Technology Licensing, Llc | Privacy camera |
| US20140181630A1 (en) * | 2012-12-21 | 2014-06-26 | Vidinoti Sa | Method and apparatus for adding annotations to an image |
| US10257506B2 (en) * | 2012-12-28 | 2019-04-09 | Samsung Electronics Co., Ltd. | Method of obtaining depth information and display apparatus |
| WO2014122506A1 (en) * | 2013-02-07 | 2014-08-14 | Nokia Corporation | Image processing of sub -images of a plenoptic image |
| WO2014130849A1 (en) | 2013-02-21 | 2014-08-28 | Pelican Imaging Corporation | Generating compressed light field representation data |
| US9456141B2 (en) | 2013-02-22 | 2016-09-27 | Lytro, Inc. | Light-field based autofocus |
| US9374512B2 (en) | 2013-02-24 | 2016-06-21 | Pelican Imaging Corporation | Thin form factor computational array cameras and modular array cameras |
| WO2014138695A1 (en) | 2013-03-08 | 2014-09-12 | Pelican Imaging Corporation | Systems and methods for measuring scene information while capturing images using array cameras |
| US8866912B2 (en) | 2013-03-10 | 2014-10-21 | Pelican Imaging Corporation | System and methods for calibration of an array camera using a single captured image |
| WO2014165244A1 (en) | 2013-03-13 | 2014-10-09 | Pelican Imaging Corporation | Systems and methods for synthesizing images from image data captured by an array camera using restricted depth of field depth maps in which depth estimation precision varies |
| WO2014164550A2 (en) | 2013-03-13 | 2014-10-09 | Pelican Imaging Corporation | System and methods for calibration of an array camera |
| WO2014164909A1 (en) | 2013-03-13 | 2014-10-09 | Pelican Imaging Corporation | Array camera architecture implementing quantum film sensors |
| US9106784B2 (en) | 2013-03-13 | 2015-08-11 | Pelican Imaging Corporation | Systems and methods for controlling aliasing in images captured by an array camera for use in super-resolution processing |
| US9578259B2 (en) | 2013-03-14 | 2017-02-21 | Fotonation Cayman Limited | Systems and methods for reducing motion blur in images or video in ultra low light with array cameras |
| US9100586B2 (en) | 2013-03-14 | 2015-08-04 | Pelican Imaging Corporation | Systems and methods for photometric normalization in array cameras |
| US10057498B1 (en) | 2013-03-15 | 2018-08-21 | Cognex Corporation | Light field vision system camera and methods for using the same |
| JP2016524125A (ja) | 2013-03-15 | 2016-08-12 | ペリカン イメージング コーポレイション | カメラアレイを用いた立体撮像のためのシステムおよび方法 |
| US9445003B1 (en) | 2013-03-15 | 2016-09-13 | Pelican Imaging Corporation | Systems and methods for synthesizing high resolution images using image deconvolution based on motion and depth information |
| US9497429B2 (en) | 2013-03-15 | 2016-11-15 | Pelican Imaging Corporation | Extended color processing on pelican array cameras |
| US10122993B2 (en) | 2013-03-15 | 2018-11-06 | Fotonation Limited | Autofocus system for a conventional camera that uses depth information from an array camera |
| JP5662511B2 (ja) * | 2013-04-10 | 2015-01-28 | シャープ株式会社 | 撮像装置 |
| CN103237162A (zh) * | 2013-04-15 | 2013-08-07 | 华中科技大学 | 光学数据采集装置及产生输出与场景对应图像数据的方法 |
| US10334151B2 (en) | 2013-04-22 | 2019-06-25 | Google Llc | Phase detection autofocus using subaperture images |
| US9241111B1 (en) * | 2013-05-30 | 2016-01-19 | Amazon Technologies, Inc. | Array of cameras with various focal distances |
| DE102013009634B4 (de) * | 2013-06-10 | 2015-07-30 | Technische Universität Dortmund | Plenoptisches Bildgebungsverfahren |
| CN103417181B (zh) * | 2013-08-01 | 2015-12-09 | 北京航空航天大学 | 一种光场视频摄像机内窥方法 |
| US9132665B2 (en) | 2013-08-22 | 2015-09-15 | Ricoh Company, Ltd. | Substrate defect detection mechanism |
| JP2015060068A (ja) * | 2013-09-18 | 2015-03-30 | 株式会社東芝 | 撮像レンズ及び固体撮像装置 |
| JP2015084089A (ja) | 2013-09-19 | 2015-04-30 | 株式会社東芝 | 固体撮像素子用のマイクロレンズアレイ、固体撮像素子、撮像装置およびレンズユニット |
| US9898856B2 (en) | 2013-09-27 | 2018-02-20 | Fotonation Cayman Limited | Systems and methods for depth-assisted perspective distortion correction |
| CN104580869B (zh) * | 2013-10-10 | 2018-06-05 | 华为技术有限公司 | 一种光场相机 |
| US9460515B2 (en) | 2013-10-25 | 2016-10-04 | Ricoh Co., Ltd. | Processing of light fields by transforming to scale and depth space |
| US9426343B2 (en) | 2013-11-07 | 2016-08-23 | Pelican Imaging Corporation | Array cameras incorporating independently aligned lens stacks |
| US10119808B2 (en) | 2013-11-18 | 2018-11-06 | Fotonation Limited | Systems and methods for estimating depth from projected texture using camera arrays |
| KR102156408B1 (ko) * | 2013-11-19 | 2020-09-16 | 삼성전자주식회사 | 레이어드 디스플레이 기법을 위한 디스플레이 장치 및 영상 생성 방법 |
| WO2015081279A1 (en) | 2013-11-26 | 2015-06-04 | Pelican Imaging Corporation | Array camera configurations incorporating multiple constituent array cameras |
| DE102013226789B4 (de) * | 2013-12-19 | 2017-02-09 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Mehrkanaloptik-Bildaufnahmevorrichtung und Mehrkanaloptik-Bildaufnahmeverfahren |
| US9392153B2 (en) | 2013-12-24 | 2016-07-12 | Lytro, Inc. | Plenoptic camera resolution |
| WO2015134996A1 (en) | 2014-03-07 | 2015-09-11 | Pelican Imaging Corporation | System and methods for depth regularization and semiautomatic interactive matting using rgb-d images |
| WO2015137635A1 (en) | 2014-03-13 | 2015-09-17 | Samsung Electronics Co., Ltd. | Image pickup apparatus and method for generating image having depth information |
| KR102228456B1 (ko) * | 2014-03-13 | 2021-03-16 | 삼성전자주식회사 | 깊이 정보를 갖는 영상을 생성하는 영상 획득 장치 및 영상 획득 방법 |
| JP2015185998A (ja) * | 2014-03-24 | 2015-10-22 | 株式会社東芝 | 画像処理方法および撮像装置 |
| US9843787B2 (en) * | 2014-04-24 | 2017-12-12 | Qualcomm Incorporated | Generation and use of a 3D radon image |
| JP2017524281A (ja) * | 2014-05-20 | 2017-08-24 | ユニヴァーシティ オブ ワシントン | 媒介現実の外科用視覚化のためのシステム及び方法 |
| US9383548B2 (en) * | 2014-06-11 | 2016-07-05 | Olympus Corporation | Image sensor for depth estimation |
| US9888229B2 (en) | 2014-06-23 | 2018-02-06 | Ricoh Company, Ltd. | Disparity estimation for multiview imaging systems |
| JP5881777B2 (ja) * | 2014-06-24 | 2016-03-09 | オリンパス株式会社 | 顕微鏡 |
| WO2016003253A1 (en) | 2014-07-04 | 2016-01-07 | Samsung Electronics Co., Ltd. | Method and apparatus for image capturing and simultaneous depth extraction |
| CN105277132B (zh) * | 2014-07-25 | 2018-02-16 | 香港理工大学 | 三维测量方法与仪器 |
| CN104166242B (zh) * | 2014-08-27 | 2017-11-17 | 深圳市华星光电技术有限公司 | 三维图像显示装置及三维图像显示器 |
| ES3058076T3 (en) | 2014-08-31 | 2026-03-06 | John Berestka | Systems for analyzing the eye |
| US9635332B2 (en) | 2014-09-08 | 2017-04-25 | Lytro, Inc. | Saturated pixel recovery in light-field images |
| CN104320565B (zh) * | 2014-09-28 | 2018-03-13 | 中国科学院长春光学精密机械与物理研究所 | 一种多镜头探测器阵列曲面像面拼接方法 |
| CN107077743B (zh) | 2014-09-29 | 2021-03-23 | 快图有限公司 | 用于阵列相机的动态校准的系统和方法 |
| WO2016053129A1 (en) * | 2014-09-30 | 2016-04-07 | Huawei Technologies Co., Ltd. | Optical system for capturing 3d images |
| JP6385241B2 (ja) * | 2014-10-27 | 2018-09-05 | キヤノン株式会社 | 画像処理装置、画像処理方法およびプログラム |
| CN104410784B (zh) * | 2014-11-06 | 2019-08-06 | 北京智谷技术服务有限公司 | 光场采集控制方法和装置 |
| EP3026884A1 (en) * | 2014-11-27 | 2016-06-01 | Thomson Licensing | Plenoptic camera comprising a light emitting device |
| KR102009921B1 (ko) * | 2014-12-22 | 2019-08-12 | 삼성전자주식회사 | 무안경 3d 디스플레이용 프리즘 시트, 및 이를 구비한 디스플레이 장치 |
| EP3588061B1 (en) | 2014-12-23 | 2023-04-19 | Apple Inc. | Optical inspection system and method including accounting for variations of optical path length within a sample |
| US10591869B2 (en) | 2015-03-24 | 2020-03-17 | Light Field Lab, Inc. | Tileable, coplanar, flat-panel 3-D display with tactile and audio interfaces |
| US10567464B2 (en) | 2015-04-15 | 2020-02-18 | Google Llc | Video compression with adaptive view-dependent lighting removal |
| US10469873B2 (en) | 2015-04-15 | 2019-11-05 | Google Llc | Encoding and decoding virtual reality video |
| US10565734B2 (en) | 2015-04-15 | 2020-02-18 | Google Llc | Video capture, processing, calibration, computational fiber artifact removal, and light-field pipeline |
| US11328446B2 (en) | 2015-04-15 | 2022-05-10 | Google Llc | Combining light-field data with active depth data for depth map generation |
| US10546424B2 (en) | 2015-04-15 | 2020-01-28 | Google Llc | Layered content delivery for virtual and augmented reality experiences |
| US10275898B1 (en) | 2015-04-15 | 2019-04-30 | Google Llc | Wedge-based light-field video capture |
| US10341632B2 (en) | 2015-04-15 | 2019-07-02 | Google Llc. | Spatial random access enabled video system with a three-dimensional viewing volume |
| US10444931B2 (en) | 2017-05-09 | 2019-10-15 | Google Llc | Vantage generation and interactive playback |
| US10419737B2 (en) | 2015-04-15 | 2019-09-17 | Google Llc | Data structures and delivery methods for expediting virtual reality playback |
| US10540818B2 (en) | 2015-04-15 | 2020-01-21 | Google Llc | Stereo image generation and interactive playback |
| US10412373B2 (en) | 2015-04-15 | 2019-09-10 | Google Llc | Image capture for virtual reality displays |
| US10440407B2 (en) | 2017-05-09 | 2019-10-08 | Google Llc | Adaptive control for immersive experience delivery |
| US9942474B2 (en) | 2015-04-17 | 2018-04-10 | Fotonation Cayman Limited | Systems and methods for performing high speed video capture and depth estimation using array cameras |
| EP3099055A1 (en) | 2015-05-29 | 2016-11-30 | Thomson Licensing | Method and apparatus for displaying a light field based image on a user's device, and corresponding computer program product |
| US10877254B2 (en) | 2015-07-17 | 2020-12-29 | Leica Microsystems Cms Gmbh | Light sheet microscope for simultaneously imaging a plurality of object planes |
| US9979909B2 (en) | 2015-07-24 | 2018-05-22 | Lytro, Inc. | Automatic lens flare detection and correction for light-field images |
| DE102015215232B4 (de) | 2015-08-10 | 2023-01-19 | Thyssenkrupp Ag | Rundumüberwachungssystem, Schiff ausgestattet mit einem Rundumüberwachungssystem und Verfahren zur Überwachung auf einem Schiff |
| WO2017040431A1 (en) * | 2015-09-01 | 2017-03-09 | Bribbla Dynamics Llc | Reference switch architectures for noncontact sensing of substances |
| DE102015011427B4 (de) | 2015-09-01 | 2019-01-17 | Thomas Engel | Bildaufnahmesystem und Bildauswertesystem |
| FR3040798B1 (fr) * | 2015-09-08 | 2018-02-09 | Safran | Camera plenoptique |
| KR102635003B1 (ko) | 2015-09-17 | 2024-02-07 | 인터디지털 브이씨 홀딩스 인코포레이티드 | 라이트 필드 데이터 표현 |
| EP3144885A1 (en) * | 2015-09-17 | 2017-03-22 | Thomson Licensing | Light field data representation |
| US10634894B2 (en) | 2015-09-24 | 2020-04-28 | Leica Biosystems Imaging, Inc. | Real-time focusing in line scan imaging |
| US9955861B2 (en) | 2015-10-16 | 2018-05-01 | Ricoh Company, Ltd. | Construction of an individual eye model using a plenoptic camera |
| CN106610521B (zh) | 2015-10-22 | 2019-11-19 | 中强光电股份有限公司 | 取像装置以及影像拍摄方法 |
| CL2015003495A1 (es) | 2015-11-30 | 2016-07-15 | Univ Concepcion | Un proceso que permite eliminar el ruido de patrón fijo en imágenes efectivas formadas por arreglos de sensores electromagnéticos de un campo de luz mediante un reenfoque digital. |
| EP3182697A1 (en) * | 2015-12-15 | 2017-06-21 | Thomson Licensing | A method and apparatus for correcting vignetting effect caused on an image captured by lightfield cameras |
| US10580210B2 (en) | 2015-12-16 | 2020-03-03 | Interdigital Ce Patent Holdings | Method and device for refocusing at least one plenoptic video |
| US10154251B2 (en) * | 2015-12-21 | 2018-12-11 | Visteon Global Technologies, Inc. | Display assembly |
| FR3046256B1 (fr) * | 2015-12-23 | 2018-01-05 | Thales | Zoom plenoptique a portee optimisee |
| CN107040699B (zh) * | 2016-02-03 | 2019-11-26 | 台湾东电化股份有限公司 | 摄影装置 |
| US10136116B2 (en) | 2016-03-07 | 2018-11-20 | Ricoh Company, Ltd. | Object segmentation from light field data |
| EP3220351A1 (en) * | 2016-03-14 | 2017-09-20 | Thomson Licensing | Method and device for processing lightfield data |
| JP6888779B2 (ja) * | 2016-03-31 | 2021-06-16 | 国立大学法人弘前大学 | 多面画像取得システム、観察装置、観察方法、スクリーニング方法、および被写体の立体再構成方法 |
| AU2017253712B8 (en) | 2016-04-21 | 2019-11-21 | Apple Inc. | Optical system for reference switching |
| DE102016005173A1 (de) * | 2016-04-29 | 2017-11-02 | Focke & Co. (Gmbh & Co. Kg) | Verfahren zur Prüfung von Zigaretten oder Zigarettenpackungen |
| WO2017191121A1 (de) | 2016-05-03 | 2017-11-09 | Leica Microsystems Cms Gmbh | Mikroskop und verfahren zum lokalisieren fluoreszenter moleküle in drei raumdimensionen |
| WO2017192663A1 (en) | 2016-05-06 | 2017-11-09 | Arizona Board Of Regents On Behalf Of The University Of Arizona | Plenoptic imaging apparatus, method, and applications |
| CN105842905B (zh) * | 2016-05-25 | 2018-08-03 | 京东方科技集团股份有限公司 | 一种虚拟曲面显示面板及显示装置 |
| US10275892B2 (en) | 2016-06-09 | 2019-04-30 | Google Llc | Multi-view scene segmentation and propagation |
| CN114296175A (zh) | 2016-07-15 | 2022-04-08 | 光场实验室公司 | 利用二维、光场和全息中继器的能量传播和横向安德森局域化 |
| US11102467B2 (en) | 2016-08-25 | 2021-08-24 | Facebook Technologies, Llc | Array detector for depth mapping |
| DE102016116782A1 (de) | 2016-09-07 | 2018-03-08 | AuE Kassel GmbH | System und Verfahren zum Erfassen von Eigenschaften mindestens eines Rades eines Schienenfahrzeugs |
| US10690898B2 (en) | 2016-09-15 | 2020-06-23 | Molecular Devices (Austria) GmbH | Light-field microscope with selective-plane illumination |
| JP6818501B2 (ja) | 2016-10-19 | 2021-01-20 | キヤノン株式会社 | リソグラフィ装置、および物品製造方法 |
| CN106488148B (zh) | 2016-11-01 | 2019-09-17 | 首都师范大学 | 一种超分辨率图像传感器及其构造方法 |
| CN106713707B (zh) * | 2016-11-18 | 2019-08-09 | 成都微晶景泰科技有限公司 | 透镜阵列成像方法及装置 |
| CN106791498B (zh) * | 2016-11-18 | 2019-11-19 | 成都微晶景泰科技有限公司 | 图像定位方法、透镜阵列成像方法及装置 |
| JP7076447B2 (ja) * | 2016-11-24 | 2022-05-27 | ユニヴァーシティ オブ ワシントン | ヘッドマウントディスプレイのための光照射野キャプチャおよびレンダリング |
| US10679361B2 (en) | 2016-12-05 | 2020-06-09 | Google Llc | Multi-view rotoscope contour propagation |
| CN108363197B (zh) * | 2017-01-26 | 2019-10-15 | 中国科学院上海生命科学研究院 | 光场显微系统、光场显微镜及其光学组件 |
| CN108363196B (zh) * | 2017-01-26 | 2019-10-15 | 中国科学院上海生命科学研究院 | 光场显微系统、光场显微镜及其光学组件 |
| JP6729428B2 (ja) * | 2017-02-01 | 2020-07-22 | オムロン株式会社 | 画像処理システム、光学センサ、及び学習装置 |
| US10594945B2 (en) | 2017-04-03 | 2020-03-17 | Google Llc | Generating dolly zoom effect using light field image data |
| US10474227B2 (en) | 2017-05-09 | 2019-11-12 | Google Llc | Generation of virtual reality with 6 degrees of freedom from limited viewer data |
| US10354399B2 (en) | 2017-05-25 | 2019-07-16 | Google Llc | Multi-view back-projection to a light-field |
| CN107293126B (zh) * | 2017-08-21 | 2018-03-23 | 广东省计算技术应用研究所 | 实时违章信息记录平台 |
| US10482618B2 (en) | 2017-08-21 | 2019-11-19 | Fotonation Limited | Systems and methods for hybrid depth regularization |
| HUE065823T2 (hu) * | 2017-09-07 | 2024-06-28 | Alcon Inc | Kontaktlencse-ellenõrzõ rendszer és eljárás |
| US10545215B2 (en) | 2017-09-13 | 2020-01-28 | Google Llc | 4D camera tracking and optical stabilization |
| WO2019067796A2 (en) | 2017-09-29 | 2019-04-04 | Masseta Technologies Llc | OPTICAL SAMPLING ARCHITECTURES OF RESOLUTION PATH |
| EP3477595A1 (en) | 2017-10-31 | 2019-05-01 | Thomson Licensing | Method and apparatus for selecting a surface in a light field, and corresponding computer program product |
| KR102578311B1 (ko) * | 2017-11-06 | 2023-09-14 | 한국전자통신연구원 | 플렌옵틱 기술에 기반한 객체 인식 시스템 및 그 동작방법 |
| CN109991751B (zh) | 2017-12-29 | 2021-05-11 | 中强光电股份有限公司 | 光场显示装置与方法 |
| CN112105975A (zh) * | 2018-01-14 | 2020-12-18 | 光场实验室公司 | 用于能量中继器中使用有序结构进行横向能量局域化的系统和方法 |
| US10965862B2 (en) | 2018-01-18 | 2021-03-30 | Google Llc | Multi-camera navigation interface |
| CN114545550B (zh) | 2018-02-13 | 2024-05-28 | 苹果公司 | 具有集成边缘外耦合器的集成光子装置 |
| EP3575848A1 (de) * | 2018-05-30 | 2019-12-04 | Siemens Healthcare Diagnostics Inc. | Analyzer zur dreidimensionalen analyse einer medizinischen probe mittels einer lichtfeldkamera |
| CN109001852A (zh) * | 2018-08-01 | 2018-12-14 | 张家港康得新光电材料有限公司 | 一种透镜阵列、3d图像采集系统以及3d显示成像系统 |
| US10623660B1 (en) | 2018-09-27 | 2020-04-14 | Eloupes, Inc. | Camera array for a mediated-reality system |
| CN109270066B (zh) * | 2018-09-28 | 2021-11-05 | 深圳市盛世智能装备有限公司 | 一种线阵相机扫描方法和装置 |
| US10812701B2 (en) | 2018-12-13 | 2020-10-20 | Mitutoyo Corporation | High-speed tag lens assisted 3D metrology and extended depth-of-field imaging |
| CN109725430B (zh) * | 2019-03-06 | 2023-04-07 | 成都工业学院 | 一种虚聚混合成像的立体显示装置 |
| US10868945B2 (en) * | 2019-04-08 | 2020-12-15 | Omnivision Technologies, Inc. | Light-field camera and method using wafer-level integration process |
| US20200344426A1 (en) * | 2019-04-15 | 2020-10-29 | Owl Autonomous Imaging, Inc. | Thermal ranging devices and methods |
| CN114600165B (zh) | 2019-09-17 | 2025-08-15 | 波士顿偏振测定公司 | 用于使用偏振提示表面建模的系统和方法 |
| EP4042366A4 (en) | 2019-10-07 | 2023-11-15 | Boston Polarimetrics, Inc. | SYSTEMS AND METHODS FOR AUGMENTING SENSOR SYSTEMS AND IMAGING SYSTEMS WITH POLARIZATION |
| CN111182191B (zh) * | 2019-11-15 | 2021-08-20 | 浙江荷湖科技有限公司 | 基于计算像差补偿的宽视场高分辨率摄像设备及方法 |
| EP3828617A1 (de) | 2019-11-26 | 2021-06-02 | Siemens Healthcare Diagnostics Inc. | Verfahren zur digitalen anfärbung von zellen |
| WO2021108002A1 (en) | 2019-11-30 | 2021-06-03 | Boston Polarimetrics, Inc. | Systems and methods for transparent object segmentation using polarization cues |
| CN111650759A (zh) * | 2019-12-31 | 2020-09-11 | 北京大学 | 近红外光斑投影的多焦距微透镜阵列遥感光场成像系统 |
| KR102942542B1 (ko) | 2020-01-29 | 2026-03-23 | 인트린식 이노베이션 엘엘씨 | 물체 포즈 검출 및 측정 시스템들을 특성화하기 위한 시스템들 및 방법들 |
| WO2021154459A1 (en) | 2020-01-30 | 2021-08-05 | Boston Polarimetrics, Inc. | Systems and methods for synthesizing data for training statistical models on different imaging modalities including polarized images |
| EP3910399A1 (de) | 2020-05-12 | 2021-11-17 | Siemens Healthcare Diagnostics, Inc. | Verfahren zur virtuellen annotation von zellen |
| US10949986B1 (en) | 2020-05-12 | 2021-03-16 | Proprio, Inc. | Methods and systems for imaging a scene, such as a medical scene, and tracking objects within the scene |
| EP3910287A1 (de) | 2020-05-14 | 2021-11-17 | Fill Gesellschaft m.b.H. | Verfahren und vorrichtung zur vermessung eines physischen objekts |
| WO2021243088A1 (en) | 2020-05-27 | 2021-12-02 | Boston Polarimetrics, Inc. | Multi-aperture polarization optical systems using beam splitters |
| JP7532651B2 (ja) | 2020-09-09 | 2024-08-13 | アップル インコーポレイテッド | ノイズ緩和のための光学システム |
| CN112235508B (zh) * | 2020-10-14 | 2021-10-29 | 浙江大学 | 一种聚焦型光场相机系统的参数设计方法 |
| CN112285925A (zh) * | 2020-11-11 | 2021-01-29 | 南开大学 | 可变焦三维成像系统 |
| CN116671119A (zh) * | 2020-11-23 | 2023-08-29 | Ams-欧司朗有限公司 | 相机系统、移动设备和操作移动设备用于多焦点成像的方法 |
| CN112911105B (zh) * | 2021-01-19 | 2022-03-29 | 中国计量科学研究院 | 一种数字pcr结果读取装置及读取方法 |
| GB2618466A (en) * | 2021-02-20 | 2023-11-08 | Boe Technology Group Co Ltd | Image acquisition device, image acquisition apparatus, image acquisition method and manufacturing method |
| DE102021104440A1 (de) | 2021-02-24 | 2022-08-25 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung eingetragener Verein | Messsystem für ein Fertigungssystem zur in-situ Erfassung einer Eigenschaft und Verfahren |
| US12020455B2 (en) | 2021-03-10 | 2024-06-25 | Intrinsic Innovation Llc | Systems and methods for high dynamic range image reconstruction |
| US12069227B2 (en) | 2021-03-10 | 2024-08-20 | Intrinsic Innovation Llc | Multi-modal and multi-spectral stereo camera arrays |
| US11954886B2 (en) | 2021-04-15 | 2024-04-09 | Intrinsic Innovation Llc | Systems and methods for six-degree of freedom pose estimation of deformable objects |
| US11290658B1 (en) | 2021-04-15 | 2022-03-29 | Boston Polarimetrics, Inc. | Systems and methods for camera exposure control |
| US12067746B2 (en) | 2021-05-07 | 2024-08-20 | Intrinsic Innovation Llc | Systems and methods for using computer vision to pick up small objects |
| US12175741B2 (en) | 2021-06-22 | 2024-12-24 | Intrinsic Innovation Llc | Systems and methods for a vision guided end effector |
| US12340538B2 (en) | 2021-06-25 | 2025-06-24 | Intrinsic Innovation Llc | Systems and methods for generating and using visual datasets for training computer vision models |
| US12172310B2 (en) | 2021-06-29 | 2024-12-24 | Intrinsic Innovation Llc | Systems and methods for picking objects using 3-D geometry and segmentation |
| US11689813B2 (en) | 2021-07-01 | 2023-06-27 | Intrinsic Innovation Llc | Systems and methods for high dynamic range imaging using crossed polarizers |
| US12293535B2 (en) | 2021-08-03 | 2025-05-06 | Intrinsic Innovation Llc | Systems and methods for training pose estimators in computer vision |
| EP4137866A1 (en) | 2021-08-18 | 2023-02-22 | Carl Zeiss Microscopy GmbH | Digital microscope and method for capturing and displaying microscopic images |
| FR3127836B1 (fr) * | 2021-10-06 | 2024-11-15 | Ecole Polytech | Dispositif d’imagerie plénoptique avec image intermédiaire virtuelle |
| US12261988B2 (en) | 2021-11-08 | 2025-03-25 | Proprio, Inc. | Methods for generating stereoscopic views in multicamera systems, and associated devices and systems |
| KR102867212B1 (ko) * | 2021-11-16 | 2025-10-13 | 국립공주대학교 산학협력단 | 단일 촬상형 tsom 검사 방법 및 그에 적합한 tsom 검사 장치 |
| CN114173063B (zh) * | 2022-02-11 | 2022-05-20 | 杭州灵西机器人智能科技有限公司 | 基于可变焦镜头的结构光相机对焦方法及结构光相机 |
| CN114935447B (zh) * | 2022-05-17 | 2026-04-17 | 深圳盛达同泽科技有限公司 | 眼镜片表面微透镜阵列的屈光测量装置及方法 |
| CN115032756B (zh) * | 2022-06-07 | 2022-12-27 | 北京拙河科技有限公司 | 一种光场相机的微透镜阵列定位方法及系统 |
| US12566281B2 (en) | 2022-08-11 | 2026-03-03 | Electronics And Telecommunications Research Institute | Microlens array for acquiring multi-focus plenoptic image and method of manufacturing the same |
| US12429682B2 (en) | 2022-09-23 | 2025-09-30 | Electronics And Telecommunications Research Institute | Plenoptic microscope system and plenoptic image processing apparatus |
| DE102023123170A1 (de) | 2023-08-29 | 2025-03-06 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Kameravorrichtung und Verfahren zum Extrahieren von Tiefeninformationen mittels einer Kameravorrichtung |
| GB2635586A (en) | 2023-11-07 | 2025-05-21 | Lightfield Medical Inc | Systems and methods for analyzing the eye |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003114403A (ja) * | 2001-07-25 | 2003-04-18 | Canon Inc | 画像表示素子及びこれを用いた投射表示装置 |
| US7307788B2 (en) * | 2004-12-03 | 2007-12-11 | Micron Technology, Inc. | Gapless microlens array and method of fabrication |
| US7068432B2 (en) * | 2004-07-27 | 2006-06-27 | Micron Technology, Inc. | Controlling lens shape in a microlens array |
| KR101134208B1 (ko) * | 2004-10-01 | 2012-04-09 | 더 보드 어브 트러스티스 어브 더 리랜드 스탠포드 주니어 유니버시티 | 촬상 장치 및 그 방법 |
| CN101426085B (zh) | 2004-10-01 | 2012-10-03 | 小利兰·斯坦福大学托管委员会 | 成像装置及其方法 |
| TW200710018A (en) * | 2005-08-30 | 2007-03-16 | Hitachi Maxell | Microlens array substrate and method of manufacturing microlens array substrate |
| US8243157B2 (en) | 2006-02-07 | 2012-08-14 | The Board Of Trustees Of The Leland Stanford Junior University | Correction of optical aberrations |
| US7505206B2 (en) * | 2006-07-10 | 2009-03-17 | Taiwan Semiconductor Manufacturing Company | Microlens structure for improved CMOS image sensor sensitivity |
| US8559705B2 (en) | 2006-12-01 | 2013-10-15 | Lytro, Inc. | Interactive refocusing of electronic images |
| US8559756B2 (en) * | 2007-08-06 | 2013-10-15 | Adobe Systems Incorporated | Radiance processing by demultiplexing in the frequency domain |
| US8097890B2 (en) * | 2008-02-11 | 2012-01-17 | Omnivision Technologies, Inc. | Image sensor with micro-lenses of varying focal lengths |
| US8289440B2 (en) * | 2008-12-08 | 2012-10-16 | Lytro, Inc. | Light field data acquisition devices, and methods of using and manufacturing same |
| US7949252B1 (en) * | 2008-12-11 | 2011-05-24 | Adobe Systems Incorporated | Plenoptic camera with large depth of field |
| US8502909B2 (en) * | 2009-10-19 | 2013-08-06 | Pixar | Super light-field lens |
-
2009
- 2009-04-22 AT AT09005628T patent/ATE551841T1/de active
- 2009-04-22 EP EP09005628A patent/EP2244484B1/en active Active
- 2009-12-04 US US13/264,173 patent/US8619177B2/en active Active
- 2009-12-04 WO PCT/EP2009/008682 patent/WO2010121637A1/en not_active Ceased
- 2009-12-04 BR BRPI0925051-4A patent/BRPI0925051A2/pt not_active IP Right Cessation
- 2009-12-04 JP JP2012506345A patent/JP5411350B2/ja active Active
- 2009-12-04 CN CN200980158906.3A patent/CN102439979B/zh active Active
- 2009-12-04 CA CA2757944A patent/CA2757944A1/en not_active Abandoned
- 2009-12-04 AU AU2009344681A patent/AU2009344681A1/en not_active Abandoned
- 2009-12-04 EP EP09764739.0A patent/EP2422525B1/en not_active Not-in-force
- 2009-12-04 KR KR1020117026075A patent/KR101605392B1/ko not_active Expired - Fee Related
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101524827B1 (ko) * | 2013-03-20 | 2015-06-03 | 충북대학교 산학협력단 | 집적영상 카메라와 이를 이용한 홀로그램 합성 기법 |
| KR20140116615A (ko) * | 2013-03-25 | 2014-10-06 | 삼성전자주식회사 | 멀티 인테그랄 포토그래피 카메라 매칭 시스템 및 방법 |
| KR20140143858A (ko) * | 2013-06-07 | 2014-12-18 | 한양대학교 산학협력단 | 다차원 영상 획득 방법 및 다차원 영상 획득 장치 |
| KR20150109187A (ko) * | 2014-03-19 | 2015-10-01 | 엘지전자 주식회사 | 구조광 시스템 |
| KR20160064592A (ko) * | 2014-11-28 | 2016-06-08 | 엘지전자 주식회사 | 마이크로 렌즈 어레이를 구비하는 광 검출 센서 |
| KR20220028118A (ko) * | 2019-08-22 | 2022-03-08 | 에이에스엠엘 네델란즈 비.브이. | 계측 디바이스 및 이를 위한 검출 장치 |
| KR20210151474A (ko) * | 2020-06-05 | 2021-12-14 | 한국과학기술원 | 마이크로렌즈 어레이를 이용한 초박형 카메라 장치 그리고 이의 다기능 이미징 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN102439979B (zh) | 2014-12-17 |
| EP2422525B1 (en) | 2014-05-21 |
| US8619177B2 (en) | 2013-12-31 |
| US20120050562A1 (en) | 2012-03-01 |
| JP2012525028A (ja) | 2012-10-18 |
| WO2010121637A1 (en) | 2010-10-28 |
| EP2422525A1 (en) | 2012-02-29 |
| CA2757944A1 (en) | 2010-10-28 |
| EP2244484A1 (en) | 2010-10-27 |
| BRPI0925051A2 (pt) | 2015-08-04 |
| JP5411350B2 (ja) | 2014-02-12 |
| EP2244484B1 (en) | 2012-03-28 |
| AU2009344681A1 (en) | 2011-11-03 |
| CN102439979A (zh) | 2012-05-02 |
| ATE551841T1 (de) | 2012-04-15 |
| KR101605392B1 (ko) | 2016-03-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101605392B1 (ko) | 디지탈 이미징 시스템, 플레놉틱 광학기구 및 이미지 데이타 처리방법 | |
| JP5929553B2 (ja) | 画像処理装置、撮像装置、画像処理方法およびプログラム | |
| US9204067B2 (en) | Image sensor and image capturing apparatus | |
| US10230894B2 (en) | Image-capturing device and image processing method | |
| US7718940B2 (en) | Compound-eye imaging apparatus | |
| KR101517704B1 (ko) | 이미지를 기록하기 위한 이미지 기록 장치 및 방법 | |
| JP6509914B2 (ja) | 深度推定のための画像センサ | |
| US9633441B2 (en) | Systems and methods for obtaining image depth information | |
| WO2016168415A1 (en) | Light guided image plane tiled arrays with dense fiber optic bundles for light-field and high resolution image acquisition | |
| KR20110059247A (ko) | 광 필드 데이터를 이용한 영상 처리 장치 및 방법 | |
| JP6003578B2 (ja) | 画像生成方法及び装置 | |
| CN112866512B (zh) | 复眼摄像装置及复眼系统 | |
| WO2019026287A1 (ja) | 撮像装置および情報処理方法 | |
| WO2014011182A1 (en) | Convergence/divergence based depth determination techniques and uses with defocusing imaging | |
| GB2540922B (en) | Full resolution plenoptic imaging | |
| JP7642022B2 (ja) | 計測装置、撮像装置、制御方法及びプログラム | |
| CN103430094A (zh) | 图像处理装置、拍摄装置以及图像处理程序 | |
| JP6234401B2 (ja) | 画像処理装置、撮像装置、画像処理方法、及びプログラム | |
| JP6569769B2 (ja) | 任意視点画像合成方法及び画像処理装置 | |
| JP6168220B2 (ja) | 画像生成装置、画像処理装置、画像生成方法及び画像処理プログラム | |
| US9888226B2 (en) | Image capturing device and program to control image capturing device | |
| JP2017034722A (ja) | 画像処理装置および撮像装置 | |
| JP6055595B2 (ja) | 立体画像撮影装置および立体画像表示装置 | |
| JP2025161589A (ja) | 処理装置、撮像装置、処理方法、プログラム、および記憶媒体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
St.27 status event code: A-0-1-A10-A15-nap-PA0105 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P18-X000 | Priority claim added or amended |
St.27 status event code: A-2-2-P10-P18-nap-X000 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| A201 | Request for examination | ||
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U12-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| FPAY | Annual fee payment |
Payment date: 20190307 Year of fee payment: 4 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| FPAY | Annual fee payment |
Payment date: 20200310 Year of fee payment: 5 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 5 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 6 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 7 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 8 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 9 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| PC1903 | Unpaid annual fee |
St.27 status event code: A-4-4-U10-U13-oth-PC1903 Not in force date: 20250317 Payment event data comment text: Termination Category : DEFAULT_OF_REGISTRATION_FEE |
|
| H13 | Ip right lapsed |
Free format text: ST27 STATUS EVENT CODE: N-4-6-H10-H13-OTH-PC1903 (AS PROVIDED BY THE NATIONAL OFFICE); TERMINATION CATEGORY : DEFAULT_OF_REGISTRATION_FEE Effective date: 20250317 |
|
| PC1903 | Unpaid annual fee |
St.27 status event code: N-4-6-H10-H13-oth-PC1903 Ip right cessation event data comment text: Termination Category : DEFAULT_OF_REGISTRATION_FEE Not in force date: 20250317 |