KR20120009640A - 천해용 잠수함 경계 시스템 - Google Patents
천해용 잠수함 경계 시스템 Download PDFInfo
- Publication number
- KR20120009640A KR20120009640A KR1020100069744A KR20100069744A KR20120009640A KR 20120009640 A KR20120009640 A KR 20120009640A KR 1020100069744 A KR1020100069744 A KR 1020100069744A KR 20100069744 A KR20100069744 A KR 20100069744A KR 20120009640 A KR20120009640 A KR 20120009640A
- Authority
- KR
- South Korea
- Prior art keywords
- node
- ultrasonic
- sonar
- signal
- pulse
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images





















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R21/013—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over
- B60R21/0136—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over responsive to actual contact with an obstacle, e.g. to vehicle deformation, bumper displacement or bumper velocity relative to the vehicle
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/74—Systems using reradiation of radio waves, e.g. secondary radar systems; Analogous systems
- G01S13/76—Systems using reradiation of radio waves, e.g. secondary radar systems; Analogous systems wherein pulse-type signals are transmitted
- G01S13/78—Systems using reradiation of radio waves, e.g. secondary radar systems; Analogous systems wherein pulse-type signals are transmitted discriminating between different kinds of targets, e.g. IFF-radar, i.e. identification of friend or foe
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/87—Combinations of sonar systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- General Physics & Mathematics (AREA)
- Mechanical Engineering (AREA)
- Acoustics & Sound (AREA)
- Measurement Of Velocity Or Position Using Acoustic Or Ultrasonic Waves (AREA)
Abstract
탐지 정확도 개선 및 안전하고 신속한 탐지 및 대응을 위하여, SONAR를 함정에 부착하거나 견인하지 않고 감시할 해역의 바다밑에 두고, 가까운 거리에 있는 물체만 감지하도록 하고, 탐지 범위를 벗어나는 지점에는 다시 SONAR를 더 설치하여, FALSE ALRAM이 매우 적고 정확도는 매우 높은 감시 장치가 되도록 하였다.
음영 구역 문제를 줄이기 위해, 감시 해역에 그물망 구조로 다수 설치된 SONAR는 코드로 구별되는 고유의 초음파 펄스를 부여하여, 다수의 SONAR가 동시에 동작하도록 하여, 한 SONAR가 음영구역 문제가 발생하더라도, 다른 SONAR는 정상적으로 반사파를 감지할 수 있도록 하였다. 또한 한 SONAR가 송출한 펄스를 다른 SONAR에서도 식별할 수 있도록 하여 음역구역 문제를 좀더 개선하였다.
적군과 아군을 식별하기 위하여, SONAR에 반응하여 아군임을 알리는 초음파 식별 장치를 구현하였으며, 피아식별 과정은 SONAR 특성을 이용하여 은밀하게 자동적으로 작동하도록 하여, 아군의 위치 및 피아식별 의도에 의한 정보 노출이 최소화되도록 하였다.
쌍끌이 어선의 그물, 물고기 충격, 태풍에 의한 강한 물쌀 등에도 훼손되지 않도록하기 위하여, 각 노드에는 전원 및 통신과 지지를 위한 케이블을 사용하지 않는 방법을 도출하였다. 먼저 전원 케이블을 사용하지 않기 위해서, 각 노드에서 필요한 전력은 자체적으로 충당할 수 있는 조류를 이용한 소형 발전기를 구현하였다. 통신 케이블을 사용하지 않기 위해서는 초음파 송수신기 및 라우터를 두어, 중계 전송하도록 하였으며, 먼 거리에 있는 함정 및 관제센터에도 무선으로 보낼 수 있도록 하였다. 전기 발생을 위한 회전체, 센서, 제어장치, 통신장치 등을 보호하게 위해 보호망을 적용하였으며, 보호망은 전력 발생 효율을 저하시키지 않으며 상기 외력에 의한 훼손을 적게 받도록 모기장 구조의 반구형 형태로 구현하였다. 또한 지지 케이블을 없애기 위해서는 노드를 소형화하고 다양한 바다 바닥 설치에 적합한 고정 장치 구현하였으며, 또한 설치 및 유지보수를 신속하고 간단하게 하기 위해서 함정에서 원격으로 설치 및 보수 가능한 원격 제어 장치를 구현하였다.
또한 센서와 제어 장치 및 기폭장치를 바닥속에서 네트워크화하여, 탐지된 정보를 함정 및 관제센터에 신속하게 전달되도록 하며, 판단에 의해 내려진 제어 명령은 해당 지점에 위치한 제어 및 기폭 장치에 실시간으로 전송되도록 하여, 함정 및 관제센터에서 안전하고도 신속 정확하게 대 잠수함을 탐지하고 대응할 수 있도록 하였다.
따라서 본 발명은 서해와 같이 낮고 수온차가 크고, 조류의 변화가 크고, 일반 어선의 조업이 활발하게 이루어지는 난해한 상황에서도 신속하고 정확하고 안정적으로 잠수함 침투를 조기에 감지하고 대응할 수 있는 대잠수함 조기 경보 체계에 크게 도움이 될 것이다. 또한 SOSUS 등 고가의 감시체계에 비해 상대적으로 매우 적은 비용으로 구축 가능하고, 유지비용 및 시간도 상대적으로 크게 절감할 수 있을 것으로 사료된다.
Description
도 2는 노드들 간에 중계 전송하여 탐지한 정보를 전송하는 것을 나타낸 그림이다.
도 3은 SONAR에 고유의 코드를 부여하는 방법을 나타낸 그림이다.
도 4는 피아식별을 위한 방법을 나타낸 그림이다.
도 5는 SONAR 센서를 위한 셀 단위 주파수 재사용 방법을 나타낸 그림이다.
도 6은 노드를 그물망 형태로 배치하여 잠수함의 이동루트를 파악하는 모습을 나타낸 그림이다.
도 7은 선박을 통하여 위치정보를 얻는 모습을 나타낸 그림이다.
도 8은 이웃 노드들을 통하여 위치정보를 얻는 모습을 나타낸 그림이다.
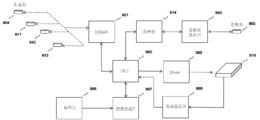
도 9는 노드에 대한 블럭도이다.
도 10은 분산 SONAR에 대한 블럭도이다.
도 11은 분산 SONAR의 수신처리부에 대한 블럭도이다.
도 12는 초음파 통신기에 대한 블럭도이다.
도 13은 피아식별 장치에 대한 블럭도이다.
도 14는 무선 원격 폭파 장치에 대한 블럭도이다.
도 15는 조류를 이용한 소형 발전기를 나타낸 그림이다.
도 16은 보호망과 보호망을 이용한 초음파 진동자 배치상태를 나타낸 그림이다.
도 17은 무인 잠수정을 이용하여 원격으로 노드를 설치하고 있는 모습을 나타낸 그림이다.
도 18은 무인 잠수정의 몸체를 나타낸 그림이다.
도 19는 무인 잠수정의 로봇손과 지지 다리를 나타낸 그림이다.
도 20은 뻘 설치용 고정장치와 고정장치를 고정하기 위한 치구를 나타낸 그림이다.
도 21은 암반 설치용 고정장치와 고정장치를 고정하기 위한 치구를 나타낸 그림이다.
도 22는 뻘 설치용 고정장치를 사용하여 노드를 고정한 모습을 나타낸 그림이다.
103 : 함정 모니터 104 : 관제센터 모니터
201, 202, 203, 204, 205, 206, 207, 208, 209 : 노드
210 : RF 중계 허브
301 : FREQUENCY & TIME 세트
302 : SONAR 펄스
401 : SONAR 송출 펄스 402 : 반사파
403 : 응답 펄스 404 : SONAR 펄스 1
405 : SONAR 펄스 2 406 : SONAR 펄스 3
407 : SONAR 펄스 4
510, 520, 530, 540, 550, 560, 570 : SONAR 셀
511, 512, 513, 514, 515, 516, 517, 518, 519 : 노드
601, 602, 603, 604, 605, 606, 607, 608 : 노드
609, 610, 611, 612, 613, 614, 615, 616 : 노드
701 : 위치정보획득장치 702 : 위치정보전송장치
801 : 설치할 위치정보획득장치
802, 803, 804 : 기존 설치된 위치정보획득장치
901 : SONAR 902 : CPU
903 : 초음파통신기 904, 905, 911, 912, 913 : 진동자
906 : 발전기 907 : 전원공급기
908 : 자세감지기 909 : DRIVER
910 : 베이스 914 : 라우터
1001 : FPGA 1002 : D/A CONVERTER
1003 : LOW PASS FILTER 1004 : POWER AMP
1005 : DUPLEXER 1006 : 진동자
1007 : 수신신호처리부 1008 : CPU
1101, 1102, 1103, 1104 : MATCHED FILTER
1105 : DETECTION PROCESSOR 1106 : PRE AMP
1201 : FPGA 1202 : D/A CONVERTER
1203, 1208 : LOW PASS FILTER 1204 : POWER AMP
1205 : DUPLEXER 1206 : 진동자
1207 : LOW NOISE AMP 1209 : A/D CONVERTER
1210 : CPU
1301 : FPGA 1302 : D/A CONVERTER
1303, 1308 : LOW PASS FILTER 1304 : POWER AMP
1305 : DUPLEXER 1306 : 진동자
1307 : LOW NOISE AMP 1309 : A/D CONVERTER
1310 : 입출력부
1401 : 기뢰 1402 : 전기뇌관
1403 : 구동장치 1404 : 제어장치
1405 : 통신장치 1406 : 초음파진동자
1407 : 감지센서 1408 : 전원부
1501 : 지지대 1502, 1506, 1507 : 수평축
1503 : 수직축 1504, 1508, 1509 : 회전체
1505, 1510, 1511 : 방향타
1601 : 보호망 1602 : 베이스
1603, 1604, 1605, 1606, 1607, 1608, 1609 : 진동자
1701 : 무인 잠수정 몸체 1702 : 지지 다리
1703 : 로봇 손 1704 : CCTV 카메라
1705 : 뚜껑 1706 : 스크루
1707 : 보호망 1708 : 모니터
1709 : 고정 장치 1710 : 설치할 장치
1801 : 전면부 1802 : 뚜껑
1803 : 전조등 1804 : CCTV 카메라
1805 : 몸체 1806 : 로봇손 지지부
1807 : 지지 다리 지지부 1808 : 지지 다리
1809 : 로봇손 1810 : 고정용 치구
1811 : 고정 장치 1812 : 설치할 장치
1901 : 로봇 손목 1902 : 1번 관절
1903 : 1번 마디 1904 : 2번 관절
1905 : 2번 마디 1906 : 3번 관절
1907 : 3번 마디 1908 : 물체 접촉부
1909 : 지지 다리 최외곽부 1910 : 2번째 외곽부
1911 : 3번째 외곽부 1912: 내축
1913, 1914, 1915, 1916 : 홈
2001 : 뻘용 고정 장치 2002 : 암나사
2003 : 윗면 2004 : 확장 장치
2005 : 숫나사 2006 : 암나사
2007 : 윗면 2008 : 아랫면
2009, 2013, 2021 : 고정용 치구 2010, 2014 : 고정용 치구 안쪽
2011, 2015, 2019 : 보조 지지부 2012, 2016, 2022 : 지지축
2020 : 턱
2101 : 암반용 고정 장치 2102 : 머리 부분
2103,2106 : 머리부분 아래쪽 2104, 2107 : 머리부분 위쪽
2105, 2108 : 암나사
2109, 2112, 2115, 2118 : 고정용 치구
2110, 2113, 2116, 2117 : 고정용 치구 안쪽
2111, 2114, 2119 : 지지축
2201, 2202, 2203 : 뻘용 고정 장치 2204 : 베이스
2205 : 보호망 2206, 2207, 2208 : 볼트
Claims (2)
- 서해에서 신속하고 정확하고 안전하게 대잠수함을 탐지하고 대응할 수 있도록 하기 위하여,
각 노드 마다 고유한 코드를 부여하고 네트워크화하며, 이웃 노드들도 상호간에 반사파를 수신할 수 있도록 하여 음영문제를 개선하고, 또한 SONAR의 특성을 이용하여 피아식별을 간단한 방법으로 가능하게 한 SONAR와;
노드를 구성하는 SONAR, 라우터, 초음파통신기, 자세감지기, DRIVER, 발전기, 전원공급기의 제어, 저장, 계산, 처리, 판단 및 데이터의 통신을 주관하는 CPU와;
이웃 노드 간, 함정 및 관제센터, 설치 모선 및 원격 제어 장치와 데이터를 송수신하기 위한 초음파통신기와;
이웃 노드의 중계전송을 통하여 원하는 목적지까지 데이터를 전송하기 위한 최적의 전달 패스를 제공하는 라우터와;
보호망 구조를 이용하여 초음파 펄스가 상하좌우 방향으로 자유롭게 지향성을 가지도록 한 초음파 진동자와;
바다밑에서 조류를 이용하여 보호망 구조에 맞게 효율적이며 안정적으로 전기를 발생시키는 발전기와;
노드의 각부에 전원을 공급하며, 잉여 전력은 축전지에 저장하도록 하는 전원공급기와;
노드의 자세 및 이동 위치를 감지하여 관제센터에 보내 신속하게 교정 및 위치의 업데이트가 되도록 하는 자세감지기와;
상기 자세감지기 및 CPU에 의해 베이스의 자세를 자체적으로도 교정할 수 있도록 하는 DRIVER와;
노드의 각부를 고정하고, 높낮이 및 기울기 조절을 가능하게 한 베이스와;
모기장 구조로 구현하여, 발전기, 센서, 제어장치, 기폭장치, 자세제어, 통신장치 각부를 보호하기 위한 보호망과;
뻘의 깊이에 따라서 길이 확장이 가능하도록 한 뻘용 고정장치 및 암반지역에 설치하기 위한 암반용 고정장치와;
모선에서 원격으로 노드를 설치할 수 있도록 한 원격 설치 장비;
로 구성된 천해용 잠수함 경계 방법 및 시스템. - 기뢰와;
화약에 니크롬선을 설치하여 기뢰를 전원 인가에 의하여 폭파시키도록 한 전기뇌관과;
제어 신호를 받아 전기뇌관을 작동할 수 있는 세기로 전력을 증폭하는 구동장치와;
통신장치에서 전달받은 신호를 해독하여 구동장치에 폭파 신호를 만들어 구동장치에 보내며, 또한 감지센서로 부터 받은 잠수함 감지 신호를 디지탈 신호로 변화하여 통신장치에 보내는 제어장치와;
초음파진동자로부터 초음파 신호를 수신하여 디지털 신호를 추출하여 제어장치에 보내며, 또한 제어장치로부터 수신한 디지털 데이터를 초음파로 변환하여 초음파진동자에 보내는 통신장치와;
초음파진동자와;
감지센서와;
자체 발전기에서 생성하는 전력을 각 부에 적절한 전압으로 변환하여 공급하는 역할과 여분의 전기를 충전하는 역할을 하는 전원부;
로 구성된 원격폭파장치를 잠수함 경계 장치의 노드에 연결하여 잠수함 경계 장치에 타격 기능을 부가하거나;
또는 상기 각부로 구성된 노드를 별도로 구현하여, 독립된 초음파원격폭파 네트워크 및 장치를 구현하는 방식.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020100069744A KR20120009640A (ko) | 2010-07-19 | 2010-07-19 | 천해용 잠수함 경계 시스템 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020100069744A KR20120009640A (ko) | 2010-07-19 | 2010-07-19 | 천해용 잠수함 경계 시스템 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20120009640A true KR20120009640A (ko) | 2012-02-02 |
Family
ID=45834410
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020100069744A Ceased KR20120009640A (ko) | 2010-07-19 | 2010-07-19 | 천해용 잠수함 경계 시스템 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR20120009640A (ko) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014068231A3 (fr) * | 2012-10-30 | 2014-07-17 | Seb S.A. | Appareil electromenager de preparation culinaire comportant une vis de pressage et au moins un filtre |
| JP2015205677A (ja) * | 2013-10-15 | 2015-11-19 | オコム・テクノロジー・リミテッド・ライアビリティ・カンパニーOcom Technology Llc | 水中船光ファイバネットワーク |
| US9277471B2 (en) | 2012-11-01 | 2016-03-01 | Intel Corporation | Channel state information feedback scheme for cooperative multi point transmission and carrier aggregation scenario |
| KR101961380B1 (ko) | 2018-07-20 | 2019-03-22 | 박영철 | 비음향 수중 잠수함 및 돌출물 탐지 시스템, 방법, 및 상기 방법을 실행시키기 위한 컴퓨터 판독 가능한 프로그램을 기록한 기록 매체 |
| CN115906627A (zh) * | 2022-11-17 | 2023-04-04 | 中国直升机设计研究所 | 一种舰载有人无人直升机协同反潜效能综合评估方法 |
-
2010
- 2010-07-19 KR KR1020100069744A patent/KR20120009640A/ko not_active Ceased
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014068231A3 (fr) * | 2012-10-30 | 2014-07-17 | Seb S.A. | Appareil electromenager de preparation culinaire comportant une vis de pressage et au moins un filtre |
| EP3202289A1 (fr) * | 2012-10-30 | 2017-08-09 | Seb S.A. | Appareil electromenager de preparation culinaire comportant une vis de pressage et au moins un filtre |
| US9277471B2 (en) | 2012-11-01 | 2016-03-01 | Intel Corporation | Channel state information feedback scheme for cooperative multi point transmission and carrier aggregation scenario |
| JP2015205677A (ja) * | 2013-10-15 | 2015-11-19 | オコム・テクノロジー・リミテッド・ライアビリティ・カンパニーOcom Technology Llc | 水中船光ファイバネットワーク |
| KR101961380B1 (ko) | 2018-07-20 | 2019-03-22 | 박영철 | 비음향 수중 잠수함 및 돌출물 탐지 시스템, 방법, 및 상기 방법을 실행시키기 위한 컴퓨터 판독 가능한 프로그램을 기록한 기록 매체 |
| CN115906627A (zh) * | 2022-11-17 | 2023-04-04 | 中国直升机设计研究所 | 一种舰载有人无人直升机协同反潜效能综合评估方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101157169B1 (ko) | 부이형 수중감시장치 | |
| US9828077B2 (en) | Methods and underwater bases for using autonomous underwater vehicle for marine seismic surveys | |
| JP6293053B2 (ja) | 水域環境で航空機の位置を決定するための航空機位置決定システム | |
| EP1381878B1 (en) | Positioning system | |
| KR20120009640A (ko) | 천해용 잠수함 경계 시스템 | |
| US10502828B2 (en) | System for detecting subsurface objects and unmanned surface vessel | |
| JP2021089128A (ja) | 魚雷防御システム | |
| CN108423140B (zh) | 全向主动声栅栏系统 | |
| US20170142323A1 (en) | Camera system and control method therefor, and electronic device and control program therefor | |
| KR101223184B1 (ko) | 등거리 관측을 이용한 수준측량 시스템 | |
| CN108280979A (zh) | 一种基于超视距无线遥控遥测技术的浮标及其自组网探测方法 | |
| CN107132580A (zh) | 水下目标的探测系统 | |
| CN109781382A (zh) | 一种基于矢量传感器的有缆潜标海洋内波监测系统 | |
| KR20150026102A (ko) | 해저 케이블 감시 장치 및 방법 | |
| CN108169753A (zh) | 一种分离式水下小平台声引信系统及探测方法 | |
| Fillinger et al. | Towards a passive acoustic underwater system for protecting harbours against intruders | |
| KR20120006686A (ko) | 천해용 소나 네트워크 | |
| RU2161319C1 (ru) | Способ обнаружения подводных объектов на морском рубеже в мелком море | |
| KR102049302B1 (ko) | 수중 금속 탐지기 및 이를 포함하는 잠수함 탐지장치 | |
| CN107121668A (zh) | 空间探测节点的探测系统 | |
| US7362657B1 (en) | Aquatic object detection and disruption system | |
| GB2525893A (en) | Detection system for underwater signals | |
| KR20130094466A (ko) | 부유형 해양 침입 감지장치 | |
| RU2540454C2 (ru) | Малогабаритная автономная сейсмоакустическая станция | |
| JP2018017502A (ja) | 水中音響測位システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20100719 |
|
| PA0201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20111228 Patent event code: PE09021S01D |
|
| PG1501 | Laying open of application | ||
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
Patent event date: 20120314 Comment text: Decision to Refuse Application Patent event code: PE06012S01D Patent event date: 20111228 Comment text: Notification of reason for refusal Patent event code: PE06011S01I |
|
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
Patent event date: 20120403 Comment text: Decision to Refuse Application Patent event code: PE06012S01D Patent event date: 20111228 Comment text: Notification of reason for refusal Patent event code: PE06011S01I |