KR20120042344A - 로봇 암 및 이를 포함하는 수술용 로봇 시스템 - Google Patents
로봇 암 및 이를 포함하는 수술용 로봇 시스템 Download PDFInfo
- Publication number
- KR20120042344A KR20120042344A KR1020100104004A KR20100104004A KR20120042344A KR 20120042344 A KR20120042344 A KR 20120042344A KR 1020100104004 A KR1020100104004 A KR 1020100104004A KR 20100104004 A KR20100104004 A KR 20100104004A KR 20120042344 A KR20120042344 A KR 20120042344A
- Authority
- KR
- South Korea
- Prior art keywords
- moving support
- surgical
- robot arm
- input unit
- master input
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 238000000034 method Methods 0.000 claims description 33
- 238000001356 surgical procedure Methods 0.000 description 11
- 238000002324 minimally invasive surgery Methods 0.000 description 4
- 238000012790 confirmation Methods 0.000 description 2
- 208000032544 Cicatrix Diseases 0.000 description 1
- 230000000740 bleeding effect Effects 0.000 description 1
- 201000010099 disease Diseases 0.000 description 1
- 208000037265 diseases, disorders, signs and symptoms Diseases 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 210000004400 mucous membrane Anatomy 0.000 description 1
- 210000000056 organ Anatomy 0.000 description 1
- 231100000241 scar Toxicity 0.000 description 1
- 230000037387 scars Effects 0.000 description 1
- 238000004904 shortening Methods 0.000 description 1
- 210000001519 tissue Anatomy 0.000 description 1
Images



Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/37—Leader-follower robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/00234—Surgical instruments, devices or methods for minimally invasive surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/00234—Surgical instruments, devices or methods for minimally invasive surgery
- A61B2017/00353—Surgical instruments, devices or methods for minimally invasive surgery one mechanical instrument performing multiple functions, e.g. cutting and grasping
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/302—Surgical robots specifically adapted for manipulations within body cavities, e.g. within abdominal or thoracic cavities
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Biomedical Technology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Robotics (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Manipulator (AREA)
Abstract
본 발명은 마스터 입력부, 마스터 입력부의 제어에 의해 동작하고, 선단부에 아치(arch)형의 제 1 이동지지부를 포함하는 로봇 암 및 제 1 이동지지부의 일측단부에 연결되는 적어도 하나의 수술기구를 포함하며, 로봇 암은 마스터 입력부의 제어에 따라, 적어도 하나의 수술기구를 제 1 이동지지부의 곡면을 따라 이동시키는 수술용 로봇 시스템을 제공한다.
Description
본 발명은 로봇 암 및 이를 포함하는 수술용 로봇 시스템에 관한 것으로, 보다 상세하게는 최소침습수술(minimal invasive surgery)을 위한 로봇 암 및 수술용 로봇 시스템에 관한 것이다.
의학적으로 수술이란 피부나 점막, 기타 조직을 수술 기구를 사용하여 자르거나 째거나 조작을 가하여 병을 고치는 것을 말한다. 특히, 수술 부위의 피부를 절개하여 열고 그 내부에 있는 기관 등을 치료, 성형하거나 제거하는 개복 수술 등은 출혈, 부작용, 환자의 고통, 흉터 등의 문제를 야기한다.
이에 대해, 피부를 절개하는 대신 작은 삽입공(孔)을 천공하고, 이를 통해 내시경, 복강경, 수술기구(surgical instrument), 미세수술용 현미경 등의 수술 기구를 삽입하여 체내에서 수술이 이루어지도록 하는 최소 침습 수술이 각광받고 있다. 한편, 이러한 최소 침습 수술은 집도의에 의해 수동으로 진행될 수도 있으나, 최근에는 시술자가 직접 기구를 조작하는 대신 수술용 로봇을 사용하여 기구를 정교하게 조작하여 수술을 수행하는 로봇 수술이 대안으로서 제시되고 있다.
로봇 수술을 위한 수술용 로봇은, 기구의 조작에 의해 필요한 신호를 생성하여 전송하는 마스터(master) 입력부와, 마스터 입력부로부터 신호를 받아 직접 환자에 수술에 필요한 조작을 가하는 슬레이브(slave) 로봇으로 이루어지며, 마스터 로봇과 슬레이브 로봇을 통합하여 구성하거나, 각각 별도의 장치로 구성하여 수술실에 배치하게 된다. 슬레이브 로봇에는 수술을 위한 조작을 위해 로봇 암(robotic arm)을 구비하게 되며, 로봇 암의 선단부에는 수술기구가 장착된다.
한편, 로봇 암의 선단부에는 하나의 수술기구만이 장착되는 관계로 동일 부위 및 동일 위치에서 다른 수술기구를 이용할 필요성이 있는 경우에 다른 로봇 암에 의한 접근 또는 현재 사용중인 로봇 암을 위치이동하여 새로운 수술기구를 장착하는 방법 등을 사용함으로서 효율성 및 정확도 측면에서 문제가 발생할 수 있다.
또한, 최소 침습 수술은 시술자 일인에 의하여 시술될 수 있으나, 수술의 효율성 및 복잡성을 고려하여 다수의 시술자에 의해 동시에 시술될 수도 있다. 이때, 로봇 수술을 위한 수술용 로봇이 시술자마다 하나씩 제공될 필요성이 존재한다. 하지만, 공간의 협소성 및 수술용 로봇들의 로봇 암들이 서로 겹치거나 부딛치게 되는 경우 등이 발생할 수 있어 시술자 일인에 의한 시술보다 효율성이 떨어지거나 시술 자체가 불가능할 수 있다.
따라서 본 발명은 상기와 같은 문제점을 해결하기 위한 것으로서, 본 발명은 하나 이상의 수술 기구를 체결할 수 있는 로봇 암 및 하나 이상의 이동 지지대를 포함하는 로봇 암을 사용하여 시술자의 시술을 보다 용이하게 하고, 시술의 정확성 및 효율성을 증대시키는 수술용 로봇 시스템을 제공한다.
상기와 같은 목적을 달성하기 위해 본 발명은 마스터 입력부, 마스터 입력부의 제어에 의해 동작하고, 선단부에 아치(arch)형의 제 1 이동지지부를 포함하는 로봇 암 및 제 1 이동지지부의 일측단부에 연결되는 적어도 하나의 수술기구를 포함하며, 로봇 암은 마스터 입력부의 제어에 따라, 적어도 하나의 수술기구를 제 1 이동지지부의 곡면을 따라 이동시키는 수술용 로봇 시스템을 제공한다.
또한, 로봇 암은 마스터 입력부의 제어에 따라, 적어도 하나의 수술기구의 이동을 독립적으로 수행하는 수술용 로봇 시스템을 제공한다.
또한, 적어도 하나의 수술기구는 제 1 이동지지부에 탈부착이 가능하도록 구성되는 수술용 로봇 시스템을 제공한다.
또한, 마스터 입력부는 복수개의 명령을 독립적으로 동시에 수행할 수 있도록 구성되는 수술용 로봇 시스템을 제공한다.
또한, 수술기구는 제 1 이동지지부의 측면부에 체결되는 수술용 로봇 시스템을 제공한다.
또한, 상기와 같은 목적을 달성하기 위하여 본 발명은 마스터 입력부, 마스터 입력부의 제어에 의해 동작하고, 선단부에 아치(arch)형의 제 1 이동지지부와 제 1 이동지지부에 체결되는 적어도 하나의 제 2 이동지지부를 포함하는 로봇 암 및 제 2 이동지지부의 일측단부에 체결되는 적어도 하나의 수술기구를 포함하며, 로봇 암은 마스터 입력부의 제어에 따라, 적어도 하나의 제 2 이동지지부를 제 1 이동지지부의 곡면을 따라 이동시키는 수술용 로봇 시스템을 제공한다.
또한, 제 2 이동지지부는 제 1 이동지지부의 하단부에 체결되는 수술용 로봇 시스템을 제공한다.
또한, 제 1 이동지지부는 측면부에 곡면을 따라 홈이 형성되어 있으며, 제 2 이동지지부는 제 1 이동지지부의 홈에 체결되는 수술용 로봇 시스템을 제공한다.
또한, 적어도 하나의 제 2 이동지지부는 아치형이며, 로봇 암은 마스터 입력부의 제어에 따라, 적어도 하나의 수술기구를 제 2 이동지지부의 곡면을 따라 이동시키는 수술용 로봇 시스템을 제공한다.
또한, 로봇 암은 마스터 입력부의 제어에 따라, 적어도 하나의 수술기구의 이동을 독립적으로 수행하는 수술용 로봇 시스템을 제공한다.
또한, 로봇 암은 마스터 입력부의 제어에 따라, 적어도 하나의 제 2 이동지지부의 이동을 독립적으로 수행하는 수술용 로봇 시스템을 제공한다.
또한, 적어도 하나의 수술기구는 제 2 이동지지부에 탈부착이 가능하도록 구성되는 수술용 로봇 시스템을 제공한다.
또한, 적어도 하나의 제 2 이동지지부는 제 1 이동지지부에 탈부착이 가능하도록 구성되는 수술용 로봇 시스템을 제공한다.
또한, 마스터 입력부는 복수개의 명령을 독립적으로 동시에 수행할 수 있도록 구성되는 수술용 로봇 시스템을 제공한다.
한편, 상기와 같은 목적을 달성하기 위하여 본 발명은 선단부에 아치(arch)형의 제 1 이동지지부를 포함하며, 제 1 이동지지부의 일측단부는 곡면을 따라 홈이 형성되어 있는 로봇 암을 제공한다.
또한, 상기와 같은 목적을 달성하기 위하여 본 발명은 선단부에 아치(arch)형의 제 1 이동지지부 및 제 1 이동지지부에 체결되는 적어도 하나의 제 2 이동지지부를 포함하며, 제 1 이동지지부의 일측단부는 곡면을 따라 홈이 형성되어 있는 로봇 암을 제공한다.
또한, 제 2 이동지지부는 아치형이며, 제 2 이동지지부는 제 1 이동지지부의 곡면을 따라 이동되는 로봇 암을 제공한다.
상기와 같이 본 발명에 의한 로봇 암 및 이를 포함한 수술용 로봇 시스템은 하나 이상의 수술 기구를 체결할 수 있는 로봇 암 및 하나 이상의 이동 지지대를 포함하는 로봇 암과 이를 포함하는 수술용 로봇 시스템을 사용함으로서, 수술기구의 동선을 최소화하여 신속하고 정확한 시술을 가능하게 하고, 다수의 시술자에 의한 동시 시술을 가능하게 하여, 시술 시간을 단축하고 수술의 안정성을 담보할 수 있는 효과가 있다.
도 1은 본 발명의 일 실시예에 따른 수술용 로봇 시스템을 도시한 것이다.
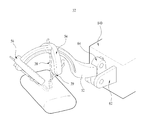
도 2는 본 발명의 일 실시예에 따른 로봇 암을 도시한 것이다.
도 3은 본 발명의 또 다른 실시예에 따른 로봇 암을 도시한 것이다.
도 4는 본 발명의 또 다른 실시예에 따른 로봇 암을 도시한 것이다.
도 2는 본 발명의 일 실시예에 따른 로봇 암을 도시한 것이다.
도 3은 본 발명의 또 다른 실시예에 따른 로봇 암을 도시한 것이다.
도 4는 본 발명의 또 다른 실시예에 따른 로봇 암을 도시한 것이다.
이하, 첨부된 도면을 참조하여 본 발명의 실시 예들을 설명한다. 이하에서 설명하는 실시 예는 본원 발명의 기술적 사상을 설명하기 위한 예시로써 제공되는 것이며, 본 발명의 기술적 범위가 이하의 실시 예들에 한정되는 것은 아니다.
도 1은 본 발명의 일 실시예에 따른 수술용 로봇 시스템(100)을 도시한 것이다. 도 1을 참조하면, 수술용 로봇 시스템(100)은 수술 테이블(0)에 누워있는 환자(P)측에서 최소침습수술법이 시행되는 동안, 시술자(S1,S2)의 기구의 조작에 의해 필요한 신호를 생성하여 전송하는 마스터 입력부(2)와, 마스터 입력부(2)로부터 신호를 받아 직접 환자에 수술에 필요한 조작을 가하는 슬레이브 로봇(1)을 포함한다. 하나의 마스터 입력부(2)는 하나의 슬레이브 로봇(1)을 제어하며, 마스터 입력부(1)는 복수의 입력부(10,11)를 포함할 수 있다. 복수의 입력부(10,11)를 통한 제어신호는 각각 독립적으로 발생하며, 하나의 슬레이브 로봇(1)을 독립적으로 제어할 수 있다. 즉, 시술자(S,S1)들은 동일한 로봇 시스템(100) 및 동일한 슬레이브 로봇(1)의 구성요소들을 공유하되, 시스템적으로 특정 구성요소들을 독립적으로 제어할 수 있도록 구성된다. 다만, 슬레이브 로봇(1) 내의 동일한 구성요소에 대한 동시 제어는 허용되지 않는다.
한편, 슬레이브 로봇(1) 내의 특정 구성요소를 특정 입력부에서 제어하도록 설정할 수 있다. 예를 들어, 제 1 로봇암(32)는 제 1 입력부(10)에 의해 제어되며, 제 2 로봇암(36)은 제 2 입력부(11)에 의해 제어되도록 설정할 수 있다. 특정 구성요소의 제어설정 및 변경은 시술 전후에 가능하며, 시술 중에도 가능하다. 이때, 시술 중의 특정 구성요소의 제어설정 및 변경은 복수 번의 확인 절차 후에 가능하다. 또한, 입력부(10,11)에 의해 제어될 수 있는 특정 구성요소들이 시술자(S1,S2)의 모니터(12,13) 등을 통하여 표시될 수 있다.
본 실시예에서는 두명의 시술자(S1,S2)를 일 예로서 설명하고 있으나, 일인 또는 복수의 시술자에 의한 시술이 가능함은 자명하다.
입력부(10,11)는 수술부위(20)의 영상을 시술자에게 보여주는 모니터(12,13), 하나 이상의 조작 가능한 입력장치(14,15), 및 프로세서(16,17)를 포함한다. 입력장치(14,15)는 조이스틱(joystick), 글러브(glove), 트리거-건(triggergun), 수동식 컨트롤러 등과 같은 다양한 입력 장치들 중의 하나 이상을 포함할 수 있다. 프로세서(16,17)는 입력부(10,11)에 통합되어 있거나 입력부(10) 옆에 위치되어 있는 컴퓨터로 구성될 수 있다.
시술자(S1,S2)는 수술부위(20)를 내시경(30)에 의해 포착되어 마스터 입력부(10,11)의 모니터(12,13)에 표시되어 있는 영상으로 관찰하면서, 프로세서(16,17)가 관련된 로봇 암(32,36)으로 하여금 탈착이 가능하게 결합된 수술기구(38,40)를 각각 조작시키도록 입력장치(14,15)를 조종함으로써 최소침습수술법을 시행한다.
내시경(30) 및 각각의 수술기구(38,40)는 캐뉼러(cannula)와 같은 수술기구 가이드를 통하여 환자 속으로 삽입될 수 있다. 각각의 로봇 암(32,34,36)은 연동장치와 같은 링크장치로 형성되고, 링크장치는 서로 결합되어 있으며 모터 제어식 관절을 통하여 조작될 수 있다. 각각의 로봇 암(32, 34, 36)은 제 1 이동지지부(52) 및/또는 제 2 이동지지부(54)를 포함할 수 있다. 제 1 이동지지부(52)는 복수개의 수술기구(38,39) 또는 복수개의 제 2 이동지지부(54,56)와 체결될 수 있으며, 제 2 이동지지부(54,54)는 복수개의 수술기구(38,39)와 체결될 수 있다. 이와 같은 로봇 암(32,34,36)의 상세한 구성에 대해서는 후술한다.
한 번에 사용되는 수술기구(38,40)의 개수와 수술용 로봇 시스템(100)에 사용되는 로봇 암(32,34,36)의 개수는 여러 가지 요소 중에서 진단법 또는 수술법 그리고 수술실 내의 공간적인 제약에 따라 결정될 수 있다. 수술과정 동안 사용되는 수술기구(38,40)를 교체할 필요가 있는 경우, 수술기구(38,40)를 로봇 암으로부터 제거하고 다른 수술기구로 교체할 수 있다. 교체될 수술기구를 확인하는 것을 도와주기 위해서, 로봇 암(32,34,36) 각각은 셋업 조인트(setup joint)와 같은 것에 인쇄된 확인 숫자나 칼라 표시부를 가질 수 있다.
또한, 시술자가 수술부위(20)를 실제로 직접 내려다 보는 느낌을 가지도록 향해 있는 영상을 표시하도록 모니터(12,12)는 시술자의 손 근처에 위치될 수 있다. 이러한 목적을 위해, 수술기구(38,40)의 영상은 실제로 시술자의 손이 위치되어 있는 곳에 배치되게 보이는 것이 바람직하다. 이를 위해, 프로세서(16,17)는 내시경(30)에 의해 보여지는 대로 해당 수술기구(38,40)의 방향을 맞추기 위해서 입력장치(14,15)의 방향을 바꾸는 것이 바람직하다.
프로세서(16,17)는 수술용 로봇 시스템(100)에서 다양한 기능을 수행한다. 프로세서(16)는 시술자가가 각각의 수술기구(38,40)를 효과적으로 이동 및/또는 조종할 수 있도록 제어 신호 버스(50)를 통하여 입력장치(14)의 기계적인 움직임을 각각의 로봇 암(32,34,36)으로 변형하여(translate) 전달한다. 또한, 프로세서(16,17)는 수술기구(38,40)가 모니터(12,13)에 표시되는 카메라 포착 화면 바깥쪽에 있거나, 모니터(12,13)에 표시되는 카메라 포착 화면 내에서 차단되어 있는 경우에 수술기구(38,40)의 위치를 표시한다.
이와 같은 프로세서(16,17)를 컴퓨터라고 기술하였지만, 실제로 프로세서(16,17)는 하드웨어, 소프트웨어 및 펌웨어(firmware)의 임의의 조합으로 구현될 수 있다. 또한, 프로세서의 기능은 본 명세서에서 기술된 바와 같이 하나의 유닛에 의해 실행될 수 있거나, 하드웨어, 소프트웨어 및 펌웨어의 임의의 조합으로 차례로 실시될 수 있는 상이한 구성요소들로 분할된 것에 의해 실행될 수 있다.
도 2는 본 발명의 일 실시예에 따른 로봇 암(32)을 도시한 것이다. 도 2를 참조하면, 로봇 암(32)는 연동장치와 같은 링크장치로 형성되고, 링크장치는 서로 결합되어 있고 모터 제어식 관절을 통하여 제어할 수 있으며, 도시된 바와 같이 제 1 로봇 암(62), 제 2 로봇 암(64)과 제 1 이동지지부(52)로 구성될 수 있다. 제 1 로봇 암(62)은 베이스(140)에 직접 부착되어 있으며, 수평면을 기준으로 롤 동작을 할 수 있도록 구성된다. 제 2 로봇 암(64)은 제 1 로봇 암(62)에 대하여 피치 방향의 동작을 할 수 있도록 구성된다. 제 3 내지 제 4 로봇 암(미도시)이 방향 동작을 위하여 추가적으로 구비될 수 있다. 로봇 암(32)의 최단부에는 제 1 이동지지부(52)가 위치한다. 제 1 이동지지부(52)에는 복수개의 수술기구(38,39)가 부착될 수 있다. 제 1 이동지지부(52)는 아치형으로 구성될 수 있으며, 제 1 이동지지부(52)의 측면부에는 아치형의 홈이 형성될 수 있다. 제 1 이동지지부(52)의 일측단에 형성된 홈을 따라서 부착된 복수개의 수술기구(38,39)를 이동시킬 수 있다. 또한, 복수개의 수술기구(38,39)는 제 1 이동지지부(52)에 탈부착이 가능하다.
시술자는 마스터 입력부(2)를 통하여 수술기구(38,39)의 이동 및 시술을 독립적으로 제어할 수 있다. 또한, 복수의 시술자에 의해 수술기구(38,39)의 이동 및 시술이 각각 제어될 수 있다. 예를 들어, 시술자(S1)이 수술기구(38)을 제어할 수 있으며, 시술자(S2)가 수술기구(39)를 제어할 수 있다.
시술자는 하나의 수술기구(38)로서 특정 부위를 시술한 후, 동일 위치로 신속하게 다른 종류의 수술기구(39)를 이동시켜 다른 시술을 수행할 수 있어 시술시간을 단축시키고, 긴급상황 발생시에 신속하게 대응할 수 있다. 또한, 시술자(S1)가 수술도구(38)을 이용하여 특정부위를 시술하는 동안, 시술자(S2)가 동시에 또 다른 수술도구(39)를 이용하여 시술자(S1)가 시술하고 있는 특정부위를 동시에 접근하여 시술할 수 있어 수술진행을 신속하게 할 수 있다.
도 3은 본 발명의 또 다른 실시예에 따른 로봇 암(32)을 도시한 것이다. 도 3을 참조하면, 도시된 바와 같이 제 1 로봇 암(62), 제 2 로봇 암(64)과 제 1 이동지지부(52) 및 제 2 이동지지부(54,56)로 구성될 수 있다. 앞서 언급한 바와 같이, 제 1 로봇 암(62)은 베이스(140)에 직접 부착되어 있으며, 수평면을 기준으로 롤 동작을 할 수 있도록 구성된다. 제 2 로봇 암(64)은 제 1 로봇 암(62)에 대하여 피치 방향의 동작을 할 수 있도록 구성된다. 제 3 내지 제 4 로봇 암(미도시)이 방향 동작을 위하여 추가적으로 구비될 수 있다. 로봇 암(32)의 최단부에는 제 1 이동지지부(52)가 위치한다. 제 1 이동지지부(52)의 측면 중심부에는 아치형의 홈이 형성될 수 있다. 제 1 이동지지부(52)는 복수개의 제 2 이동지지부(54,56)가 체결된다. 본 실시예에서는 제 2 이동지지부(54,56)가 2개가 존재하는 경우를 도시하고 있으나, 필요에 따라 제 2 이동지지부를 가감할 수 있다. 제 2 이동지지부(54,56)는 제 1 이동지지부(52)의 아치형의 홈을 따라 이동할 수 있다. 또한, 제 2 이동지지부(54,56)은 복수개의 수술기구(38,39)가 부착될 수 있다. 제 2 이동지지부(52)는 아치형으로 구성될 수 있으며, 제 1 이동지지부(52)의 측면부에는 아치형의 홈이 형성될 수 있다. 제 1 이동지지부(52)의 일측단에 형성된 홈을 따라서 부착된 복수개의 수술기구(38,39)를 이동시킬 수 있다. 복수개의 수술기구(38,39)는 제 2 이동지지부(54)에 탈부착이 가능하다.
시술자(S1)는 입력부(10)를 통하여 제 2 이동지지부(54,56)와 수술기구(38,39)의 이동, 그리고 수술기구를 통한 시술을 독립적으로 제어할 수 있다. 또한, 복수의 시술자(S1,S2)에 의해 제 2 이동지지부(54,56)와 수술기구(38,39)의 이동 및 수술기구를 통한 시술이 각각 제어될 수 있다. 시술자(S1)는 하나의 제 2 이동지지부(54)에 부착된 하나의 수술기구(38)로서 특정 부위를 시술한 후, 동일 위치에 또 다른 수술기구(39)를 이동시켜 다른 종류의 시술을 수행할 수 있으며, 동시에 또 다른 제 2 이동지지부(56)에 부착된 복수개의 수술기구(미도시)를 이동시켜 수술시간을 단축시키고, 긴급상황 발생시에 신속하게 대응할 수 있다.
또한, 시술자(S1)가 하나의 제 2 이동지지부(54)에 부착된 수술도구(38,39)을 이용하여 특정부위를 시술하는 동안, 시술자(S2)가 동시에 또 다른 제 2 이동지지부(56)에 부착된 수술도구(미도시)를 이용하여 시술자(S1)가 시술하고 있는 특정부위를 동시에 시술하거나, 또 다른 수술부위의 시술을 진행할 수 있다.
도 4는 본 발명의 또 다른 실시예에 따른 로봇 암을 도시한 것이다. 도 4를 참조하면, 제 2 이동지지부(54,56)가 제 1 이동지지부(52)의 하단에 체결되고, 하단의 곡면을 따라 이동되는 것을 제외하고는 도 3과 동일하다.
상기에서 본 발명의 바람직한 실시예에 대하여 설명하였지만, 본 발명은 이에 한정되는 것이 아니고 특허청구범위와 발명의 상세한 설명 및 첨부한 도면의 범위 안에서 여러 가지로 변형하여 실시하는 것이 가능하고 이 또한 본 발명의 범위에 속하는 것은 당연하다.
1: 슬레이브 로봇 2: 마스터 입력부
10, 11: 입력부 12, 13: 모니터
14, 15: 입력장치 16, 17: 프로세서
20: 수술부위 30: 내시경
32, 34, 36: 로봇 암 38, 39, 40: 수술기구
50: 제어신호버스 52: 제 1 이동지지부
54, 56: 제 2 이동지지부 62: 제 1 로봇 암
64: 제 2 로봇 암 100: 수술 로봇 시스템
140: 베이스
10, 11: 입력부 12, 13: 모니터
14, 15: 입력장치 16, 17: 프로세서
20: 수술부위 30: 내시경
32, 34, 36: 로봇 암 38, 39, 40: 수술기구
50: 제어신호버스 52: 제 1 이동지지부
54, 56: 제 2 이동지지부 62: 제 1 로봇 암
64: 제 2 로봇 암 100: 수술 로봇 시스템
140: 베이스
Claims (17)
- 마스터 입력부;
상기 마스터 입력부의 제어에 의해 동작하고, 선단부에 아치(arch)형의 제 1 이동지지부를 포함하는 로봇 암; 및
상기 제 1 이동지지부의 일측단부에 연결되는 적어도 하나의 수술기구를 포함하며,
상기 로봇 암은 상기 마스터 입력부의 제어에 따라, 상기 적어도 하나의 수술기구를 상기 제 1 이동지지부의 곡면을 따라 이동시키는 수술용 로봇 시스템. - 제 1 항에 있어서,
상기 로봇 암은 상기 마스터 입력부의 제어에 따라, 상기 적어도 하나의 수술기구의 이동을 독립적으로 수행하는 수술용 로봇 시스템. - 제 1 항에 있어서,
상기 적어도 하나의 수술기구는 상기 제 1 이동지지부에 탈부착이 가능하도록 구성되는 수술용 로봇 시스템. - 제 1 항에 있어서,
상기 마스터 입력부는 복수개의 명령을 독립적으로 동시에 수행할 수 있도록 구성되는 수술용 로봇 시스템. - 제 1 항에 있어서,
상기 수술기구는 상기 제 1 이동지지부의 측면부에 체결되는 수술용 로봇 시스템. - 마스터 입력부;
상기 마스터 입력부의 제어에 의해 동작하고, 선단부에 아치(arch)형의 제 1 이동지지부와 상기 제 1 이동지지부에 체결되는 적어도 하나의 제 2 이동지지부를 포함하는 로봇 암; 및
상기 제 2 이동지지부의 일측단부에 체결되는 적어도 하나의 수술기구를 포함하며,
상기 로봇 암은 상기 마스터 입력부의 제어에 따라, 상기 적어도 하나의 제 2 이동지지부를 상기 제 1 이동지지부의 곡면을 따라 이동시키는 수술용 로봇 시스템. - 제 6 항에 있어서,
상기 제 2 이동지지부는 상기 제 1 이동지지부의 하단부에 체결되는 수술용 로봇 시스템. - 제 6 항에 있어서,
상기 제 1 이동지지부는 측면부에 곡면을 따라 홈이 형성되어 있으며, 상기 제 2 이동지지부는 상기 제 1 이동지지부의 홈에 체결되는 수술용 로봇 시스템. - 제 6 항에 있어서,
상기 적어도 하나의 제 2 이동지지부는 아치형이며, 상기 로봇 암은 상기 마스터 입력부의 제어에 따라, 상기 적어도 하나의 수술기구를 상기 제 2 이동지지부의 곡면을 따라 이동시키는 수술용 로봇 시스템. - 제 6 항에 있어서,
상기 로봇 암은 상기 마스터 입력부의 제어에 따라, 상기 적어도 하나의 수술기구의 이동을 독립적으로 수행하는 수술용 로봇 시스템. - 제 6 항에 있어서,
상기 로봇 암은 상기 마스터 입력부의 제어에 따라, 상기 적어도 하나의 제 2 이동지지부의 이동을 독립적으로 수행하는 수술용 로봇 시스템. - 제 6 항에 있어서,
상기 적어도 하나의 수술기구는 상기 제 2 이동지지부에 탈부착이 가능하도록 구성되는 수술용 로봇 시스템. - 제 6 항에 있어서,
상기 적어도 하나의 제 2 이동지지부는 상기 제 1 이동지지부에 탈부착이 가능하도록 구성되는 수술용 로봇 시스템. - 제 6 항에 있어서,
상기 마스터 입력부는 복수개의 명령을 독립적으로 동시에 수행할 수 있도록 구성되는 수술용 로봇 시스템. - 선단부에 아치(arch)형의 제 1 이동지지부를 포함하며,
상기 제 1 이동지지부의 일측단부는 곡면을 따라 홈이 형성되어 있는 로봇 암. - 선단부에 아치(arch)형의 제 1 이동지지부; 및
상기 제 1 이동지지부에 체결되는 적어도 하나의 제 2 이동지지부를 포함하며,
상기 제 1 이동지지부의 일측단부는 곡면을 따라 홈이 형성되어 있는 로봇 암. - 제 16 항에 있어서,
상기 제 2 이동지지부는 아치형이며, 상기 제 2 이동지지부는 상기 제 1 이동지지부의 곡면을 따라 이동되는 로봇 암.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020100104004A KR20120042344A (ko) | 2010-10-25 | 2010-10-25 | 로봇 암 및 이를 포함하는 수술용 로봇 시스템 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020100104004A KR20120042344A (ko) | 2010-10-25 | 2010-10-25 | 로봇 암 및 이를 포함하는 수술용 로봇 시스템 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20120042344A true KR20120042344A (ko) | 2012-05-03 |
Family
ID=46263118
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020100104004A Withdrawn KR20120042344A (ko) | 2010-10-25 | 2010-10-25 | 로봇 암 및 이를 포함하는 수술용 로봇 시스템 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR20120042344A (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20160133483A (ko) * | 2014-03-17 | 2016-11-22 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 모드 전환 시의 진동을 감쇠시키기 위한 명령 성형 |
| EP3146930A1 (en) | 2015-09-22 | 2017-03-29 | Fundacja Rozwoju Kardiochirurgii Im. Prof. Zbigniewa Religi | A surgical robot's tool arms assembly |
-
2010
- 2010-10-25 KR KR1020100104004A patent/KR20120042344A/ko not_active Withdrawn
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20160133483A (ko) * | 2014-03-17 | 2016-11-22 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 모드 전환 시의 진동을 감쇠시키기 위한 명령 성형 |
| EP3146930A1 (en) | 2015-09-22 | 2017-03-29 | Fundacja Rozwoju Kardiochirurgii Im. Prof. Zbigniewa Religi | A surgical robot's tool arms assembly |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11583333B2 (en) | Mapping vessels for resecting body tissue | |
| US9844411B2 (en) | Extendable suction surface for bracing medical devices during robotically assisted medical procedures | |
| US9724169B2 (en) | Bracing of bundled medical devices for single port entry, robotically assisted medical procedures | |
| KR102032853B1 (ko) | 복수의 관절형 기구들을 탠덤식으로 엔트리 가이드를 향해 후퇴시키기 위한 방법 및 시스템 | |
| US10182873B2 (en) | Structural adjustment systems and methods for a teleoperational medical system | |
| JP5101519B2 (ja) | ロボット手術システムの機器インターフェース | |
| KR101234618B1 (ko) | 수술용 로봇 | |
| JP2020534933A (ja) | 追跡カメラ技術を有するロボット手術デバイスならびに関連するシステムおよび方法 | |
| CN115500950B (zh) | 内窥镜位姿调整方法、手术机器人及存储介质 | |
| JP2012005557A (ja) | 医療用ロボットシステム | |
| Dwivedi et al. | Robotic surgery: a review on recent advances in surgical robotic systems | |
| KR20120068097A (ko) | 수술기구, 로봇 암 및 이를 포함하는 수술용 로봇 시스템 | |
| JP7330543B2 (ja) | 着用可能な手術用ロボットアーム | |
| KR20120045734A (ko) | 수술용 로봇 시스템의 마스터 입력장치 및 이를 이용한 수술용 로봇 시스템의 제어방법 | |
| KR20120052574A (ko) | 수술용 로봇 시스템 및 수술용 로봇 시스템의 내시경 구동방법 | |
| KR20120042344A (ko) | 로봇 암 및 이를 포함하는 수술용 로봇 시스템 | |
| KR20120052573A (ko) | 수술용 로봇 시스템 및 수술용 로봇 시스템의 제어방법 | |
| WO2013106664A1 (en) | Systems and methods for robot-assisted transurethral exploration and intervention | |
| KR20120057233A (ko) | 수술 기구 시스템 | |
| KR20120048845A (ko) | 수술용 로봇의 로봇 암 시스템 | |
| KR20120039281A (ko) | 수술기구 및 이를 포함하는 수술용 로봇 시스템 | |
| CN222917612U (zh) | 医疗系统 | |
| US20240225756A1 (en) | Physician Enabled Laser Control from Ureteroscope Handle | |
| KR20120053650A (ko) | 수술기구 형태 변형 시스템 | |
| EP4646164A1 (en) | Translational locking of an out-of-view control point in a computer-assisted system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20101025 |
|
| PG1501 | Laying open of application | ||
| PC1203 | Withdrawal of no request for examination | ||
| WITN | Application deemed withdrawn, e.g. because no request for examination was filed or no examination fee was paid |