KR20120060227A - 포개지고 선형으로 진동하는 진동 부재를 포함하는 이중축 내충격 요 레이트 센서 - Google Patents
포개지고 선형으로 진동하는 진동 부재를 포함하는 이중축 내충격 요 레이트 센서 Download PDFInfo
- Publication number
- KR20120060227A KR20120060227A KR1020127009037A KR20127009037A KR20120060227A KR 20120060227 A KR20120060227 A KR 20120060227A KR 1020127009037 A KR1020127009037 A KR 1020127009037A KR 20127009037 A KR20127009037 A KR 20127009037A KR 20120060227 A KR20120060227 A KR 20120060227A
- Authority
- KR
- South Korea
- Prior art keywords
- mass
- rotational speed
- speed sensor
- vibration
- deflection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images
















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5642—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using vibrating bars or beams
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5719—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using planar vibrating masses driven in a translation vibration along an axis
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5719—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using planar vibrating masses driven in a translation vibration along an axis
- G01C19/5733—Structural details or topology
- G01C19/574—Structural details or topology the devices having two sensing masses in anti-phase motion
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Gyroscopes (AREA)
- Pressure Sensors (AREA)
Abstract
Description
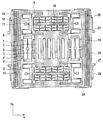
도 2 는 예시적인 실시형태 1 의 평면도를 도시하고,
도 3 은 대안적인 감지기로, 예시적인 실시형태 1 의 평면도를 도시하고,
도 4 는 판독 장치를 포함하는 구동 모드 및 제 1 모드의, 예시적인 실시형태 1 을 도시하고,
도 5 는 판독 유닛 및 판독 장치을 포함하지 않는 구동 모드 및 제 1 모드의, 예시적인 실시형태 1 을 도시하고,
도 6 은 제 2 모드 또는 제 1 판독 모드의 예시적인 실시형태를 도시하고,
도 7 은 제 3 모드 또는 제 2 판독 모드의 예시적인 실시형태를 도시하고,
도 8 은 기생의 원하지 않은 모드로써 역위상 제 3 모드의 예시적인 실시형태를 도시하고,
도 9 는 제 1 연결 장치의 C 형상의 연결빔에 관련된 판독 장치 및 미반응 편향 전극의 y 축을 무게 중심으로 연결 장치의 2 개의 에지 세그먼트의 동위상의 기생의 회전 편향의 예시적인 실시형태를 도시하고,
도 10 은 구동, 구동 모니터링 및 트림 (trim) 구조체를 갖는 예시적인 실시형태 1 을 도시하고,
도 11 은 예시적인 실시형태 2 의 이중축 회전 속도 센서의 평면도를 도시하고,
도 12 는 제 1 모드 및 구동 모드의 예시적인 실시형태 2 를 도시하고,
도 13 은 제 2 모드 및 제 1 판독 모드의 예시적인 실시형태 2 를 도시하고,
도 14 는 제 3 모드 또는 제 2 판독 모드의 예시적인 실시형태 2 를 도시하고,
도 15 는 예시적인 실시형태 3 의 이중축 회전 속도 센서의 평면도를 도시하고,
도 16 은 제 1 모드 또는 구동 모드의 예시적인 실시형태 3 을 도시하고,
도 17 은 제 2 모드 또는 제 1 판독 모드의 예시적인 실시형태 3 을 도시하고,
도 18 은 제 3 모드 또는 제 2 판독 모드의 예시적인 실시형태를 도시한다.
Claims (15)
- 베이스 표면이 데카르트 좌표계 (x, y, z) 의 x-y 평면에 평행하여 정렬되는 기판을 포함하는 미소기계식 회전 속도 센서로서, 상기 회전 속도 센서는 적어도 하나의 구동 장치 (14) 에 연결되어 매달려진 제 1 진동 매스 (1) 및 제 2 진동 매스 (2) 를 포함하고, 상기 제 1 진동 매스 및 제 2 진동 매스 (2) 가 일 구동 모드에서 역위상으로 편향되도록 구동되고, 상기 회전 속도 센서는 적어도 2 개의 상호 본질적으로 직각인 감도축 (z, y) 에 대한 회전 속도를 감지할 수 있도록 설계되는 미소기계식 회전 속도 센서에 있어서,
적어도 제 2 진동 매스 (2) 는 x-y 평면상의 위치에 관하여 제 1 진동 매스 (1) 를 적어도 부분적으로 둘러싸는 프레임의 형태로 존재하는 것을 특징으로 하는 미소기계식 회전 속도 센서. - 제 1 항에 있어서,
제 1 진동 매스 및 제 2 진동 매스는 적어도 하나의 제 1 연결 장치 및 적어도 하나의 제 2 연결 장치에 의하여 서로에 대하여 연결되어, 제 1 회전 속도가 제 1 감도축 (y) 에 대해 감지될 때, 제 1 판독 모드에서 역위상으로 진동하고, 제 2 회전 속도가 제 2 감도축 (z) 에 대해 감지될 때, 마찬가지로 제 2 판독 모드에서 역위상으로 진동하는 것을 특징으로 하는 마이크로 기계식 회전 속도 센서. - 제 1 항 또는 제 2 항에 있어서,
제 1 진동 매스 및 제 2 진동 매스는 본질적으로 동일한 매스를 가지고, 전체 회전 속도 센서의 무게 중심이 구동 모드에서 진동 매스의 편향에 관하여 정지하여 본질적으로 유지되도록 회전 속도 센서는 설계되고, 제 1 진동 매스 및 제 2 진동 매스는 설계되어 배치되는 것을 특징으로 하는 마이크로 기계식 회전 속도 센서. - 제 2 항 또는 제 3 항에 있어서,
회전 속도 센서가, 역위상으로 회전 속도 센서의 제 1 진동 매스 및 제 2 진동 매스를 구동하는 단일 구동 장치를 가지고, 진동 매스는 매달려져, 적절한 방법으로 제 1 연결 장치에 의하여 서로에 연결되는 것을 특징으로 하는 마이크로 기계식 회전 속도 센서. - 제 1 항 내지 제 4 항 중 어느 한 항에 있어서,
제 1 감도축 (y) 이 x-y 평면, 다시 말해서 기판의 베이스 표면에 놓이도록 회전 속도 센서가 설계되고, 특히, 제 1 감도축은 x 축 또는 y 축에 평행하도록 설계되고, 제 2 감도축 (z) 은 z 축, 다시 말해서 기판의 베이스 표면에 수직으로 평행하도록 설계되는 것을 특징으로 하는 마이크로 기계식 회전 속도 센서. - 제 2 항 내지 제 5 한 중 어느 한 항에 있어서,
회전 속도 센서의 제 1 진동 매스 및 제 2 진동 매스는 적어도 제 1 연결 장치 및 제 2 연결 장치에 의하여 설계되고 매달리고 연결되고, 구동 모드에서의 각각의 편향에 대하여, 제 1 판독 모드에서의 각각의 편향에 대해, 그리고 제 2 판독 모드에서의 각각의 편향에 대해, 진동 매스는 배타적으로 이동할 수 있도록 매달려지고, 제 1 진동 매스 및 제 2 진동 매스는 모든 다른 편향, 즉 다른 방향으로의 모든 편향에 관하여 단단하게 매달려지고, 제 1 진동 매스 및 제 2 진동 매스의 모든 동위상 편향이 제거되는 것을 특징으로 하는 미소기계식 회전 속도 센서. - 제 1 항 내지 제 6 항 중 어느 한 항에 있어서,
적어도 2 개의 판독 모드의 각각에서 제 1 진동 매스 및 제 2 진동 매스의 편향은 중복하여 그리고 차별적으로 감지되고, 각각의 경우에 2 개의 진동 매스 중 하나의 편향이 역위상 편향, 즉 동위상의 진동 매스 및 역위상의 다른 진동 매스에 관해 2 개의 판독 장치에 의하여 반대로 감지되고, 즉 제 1 진동 매스 및 제 2 진동 매스 및/또는 적어도 하나의 진동 매스로 또한 편향되는 장치는 적어도 2 개의 판독 장치와 각각 관련되고, 상기 2 개의 판독 장치는, 하나의 판독 장치가 정전 용량의 감소를 감지할 때, 다른 판독 장치가 정전 용량의 증가를 감지하도록 특히 설계되고 배열된 것을 특징으로 하는 마이크로 기계식 회전 속도 센서. - 제 2 항 내지 제 7 항 중 어느 한 항에 있어서,
제 1 연결 장치 및 제 2 연결 장치 각각은 적어도 하나의 본질적으로 단단한 연결빔을 포함하고, 상기 연결빔은 한편으로는 제 1 진동 매스에 다른 한편으로는 제 2 진동 매스에 스프링 부재에 의하여 연결되고, 특히, 1 개 또는 2 개의 축에 대한 연결빔의 회전 편향을 허용하고 연결빔의 추가의 회전 편향 및 모든 병진 편향을 제거하도록 설계된 적어도 하나의 비틀림 스프링 부재에 매달려지는 것을 특징으로 하는 마이크로 기계식 회전 속도 센서. - 제 8 항에 있어서,
제 1 연결 장치는 구동 모드에 관하여 진동 매스의 역위상 편향을 강제하고 구동 모드에 관하여 동위상 편향을 제거하도록 설계되고, 제 1 연결 장치 및 제 2 연결 장치는 제 1 판독 모드 및 제 2 판독 모드에 관하여 진동 매스의 역위상 편향을 강제하고 1 판독 모드 및 제 2 판독 모드에 관하여 동위상 편향을 제거하도록, 특히 제 1 진동 매스 및 제 2 진동 매스의 모든 동위상 편향을 억제하도록 설계되는 것을 특징으로 하는 마이크로 기계식 회전 속도 센서. - 제 8 항 또는 제 9 항에 있어서,
적어도 하나의 연결 장치의 적어도 하나의 연결빔은 상기 경우에서 제 1 판독 모드 또는 제 2 판독 모드 중 하나는 동위상이고 나머지 하나는 역위상인 동위상 및 역위상의 제 1 판독 모드 또는 제 2 판독 모드에 관하여, 상기 연결빔의 회전 편향을 감지하도록 설계되어 배열되는 2 개 이상의 판독 장치와 관련되는 것을 특징으로 하는 마이크로 기계식 회전 속도 센서. - 제 10 항에 있어서,
상기 연결빔은 본질적으로 C 형태가 되도록 설계되고, 특히 적어도 2 개의 에지 세그먼트 및 일 연결 세그먼트를 갖고서 베이스 표면은 정지 상태에서 x-y 평면에 본질적으로 평행하고, 2 개의 에지 세그먼트가 역위상으로 회전 편향될 수 있도록 연결 세그먼트는 비틀림 스프링 부재에 본질적으로 중심으로 연결되고, 상기 비틀림 스프링 부재는 y 축에 대한 기생 회전 편향에 관하여 적어도 완전하게 강성을 가지지 않고, 상기 연결빔과 관련된 2 개의 판독 장치는, 2 개의 에지 세그먼트의 근본적으로 세로 방향측의 방향에서 2 개의 판독 장치의 세로 방향측의 센터가 에지 세그먼트 중 하나의 세로 방향측의 센터와 대향하여 x-y 정렬에 관하여 각각 배열되도록 배치되고, 2 개의 에지 세그먼트가 경사진 위치에 있는 것에 기인하는, y 축에 대한 2 개의 에지 세그먼트의 가능한 동위상 회전 편향은 2 개의 판독 장치에 의하여 본질적으로 감지되지 않고, 특히 상기 2 개의 판독 장치는 각각의 경우에서 베이스 표면에 관하여 정지 상태에서 2 개의 에지 세그먼트에 평행하여 배열되는 것을 특징으로 하는 마이크로 기계식 회전 속도 센서. - 제 1 항 내지 제 11 항 중 어느 한 항에 있어서,
적어도 하나의 구동 장치가 제 1 진동 매스 또는 제 2 진동 매스에 단단하게 연결된 것을 특징으로 하는 마이크로 기계식 회전 속도 센서. - 제 1 항 내지 제 11 항 중 어느 한 항에 있어서,
적어도 하나의 구동 장치가 적어도 하나의 스프링 부재에 의하여 제 1 진동 매스 또는 제 2 진동 매스에 연결되어, 병진 연결이 구동 유닛과 제 1 진동 매스 또는 제 2 진동 매스 사이에서 구동 방향으로 제공되고, 분리는 다른 모든 적어도 병진 방향으로 제공되는 것을 특징으로 하는 마이크로 기계식 회전 속도 센서. - 제 13 항에 있어서,
상기 경우에 구동 장치는 적어도 하나의 추가의 스프링 부재에 의하여 기판상에 추가적으로 매달려지고, 상기 매달림은 x-y 평면에 단단해지도록, 이러한 경우 구동 방향에 대한 직각으로 설계되고, 출력 구동 방향 이외의 방향에서의 x-y 평면상의 구동 장치의 편향은 제거되는 것을 특징으로 하는 마이크로 기계식 회전 속도 센서. - 자동차에서, 특히 요 레이트, 즉 차량의 수직축을 중심으로하는 회전을 감지하기 위한, 그리고 차량의 롤 레이트 또는 피치 레이트를 감지하기 위한 제 1 항 내지 제 14 항 중 어느 한 항에 따른 회전 속도 센서의 용도.
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102009029310 | 2009-09-09 | ||
| DE102009029311.6 | 2009-09-09 | ||
| DE102009029310.8 | 2009-09-09 | ||
| DE102009029311 | 2009-09-09 | ||
| PCT/EP2010/063250 WO2011029879A1 (de) | 2009-09-09 | 2010-09-09 | Doppelaxialer, schockrobuster, drehratensensor mit ineinanderliegenden, linear schwingenden seismischen elementen |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20120060227A true KR20120060227A (ko) | 2012-06-11 |
| KR101699573B1 KR101699573B1 (ko) | 2017-01-24 |
Family
ID=42993828
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020127008981A Expired - Fee Related KR101708084B1 (ko) | 2009-09-09 | 2010-09-09 | 선형 및 회전형 진동 부재를 포함하는 이중축 내충격 회전 속도 센서 |
| KR1020127009037A Expired - Fee Related KR101699573B1 (ko) | 2009-09-09 | 2010-09-09 | 포개지고 선형으로 진동하는 진동 부재를 포함하는 이중축 내충격 요 레이트 센서 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020127008981A Expired - Fee Related KR101708084B1 (ko) | 2009-09-09 | 2010-09-09 | 선형 및 회전형 진동 부재를 포함하는 이중축 내충격 회전 속도 센서 |
Country Status (6)
| Country | Link |
|---|---|
| US (2) | US9068834B2 (ko) |
| EP (2) | EP2475960B1 (ko) |
| KR (2) | KR101708084B1 (ko) |
| CN (2) | CN102483328B (ko) |
| DE (2) | DE102010040514A1 (ko) |
| WO (2) | WO2011029878A1 (ko) |
Families Citing this family (42)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2945621B1 (fr) * | 2009-05-15 | 2011-08-26 | Commissariat Energie Atomique | Structure de couplage pour gyrometre resonnant |
| CN102483328B (zh) | 2009-09-09 | 2015-08-05 | 大陆-特韦斯贸易合伙股份公司及两合公司 | 具有线性和旋转地震元件的双轴、抗震旋转速率传感器 |
| US9507039B2 (en) * | 2010-12-13 | 2016-11-29 | Schlumberger Technology Corporation | Seismic source, system, and method |
| JP5822177B2 (ja) * | 2011-05-20 | 2015-11-24 | セイコーエプソン株式会社 | ジャイロセンサー、電子機器 |
| DE102011056971A1 (de) | 2011-12-23 | 2013-06-27 | Maxim Integrated Products, Inc. | Mikromechanischer Coriolis-Drehratensensor |
| JP6191151B2 (ja) * | 2012-05-29 | 2017-09-06 | 株式会社デンソー | 物理量センサ |
| DE102012224081A1 (de) * | 2012-12-20 | 2014-06-26 | Continental Teves Ag & Co. Ohg | Sensor zum Erfassen einer Drehrate eines Objektes |
| US9958271B2 (en) * | 2014-01-21 | 2018-05-01 | Invensense, Inc. | Configuration to reduce non-linear motion |
| FI20155095A (fi) * | 2015-02-11 | 2016-08-12 | Murata Manufacturing Co | Mikromekaaninen kulmanopeusanturi |
| FI20155094A (fi) | 2015-02-11 | 2016-08-12 | Murata Manufacturing Co | Mikromekaaninen kulmanopeusanturi |
| DE102015216460A1 (de) * | 2015-08-28 | 2017-03-02 | Robert Bosch Gmbh | Zweiachsiger ultrarobuster Drehratensensor für Automotive Anwendungen |
| US20170168512A1 (en) * | 2015-12-14 | 2017-06-15 | Le Holdings (Beijing) Co., Ltd. | Output voltage stabilizing circuit of power supply |
| FR3046223B1 (fr) * | 2015-12-23 | 2018-02-16 | Safran | Systeme de suspension d'une masse mobile comprenant des moyens de liaison de la masse mobile a linearite optimisee |
| ITUB20159197A1 (it) | 2015-12-29 | 2017-06-29 | St Microelectronics Srl | Giroscopio microelettromeccanico con reiezione di disturbi e metodo di rilevamento di una velocita' angolare |
| US10371521B2 (en) | 2016-05-26 | 2019-08-06 | Honeywell International Inc. | Systems and methods for a four-mass vibrating MEMS structure |
| US10696541B2 (en) | 2016-05-26 | 2020-06-30 | Honeywell International Inc. | Systems and methods for bias suppression in a non-degenerate MEMS sensor |
| US10126129B2 (en) * | 2016-07-11 | 2018-11-13 | Nxp Usa, Inc. | Vibration and shock robust gyroscope |
| US10514259B2 (en) * | 2016-08-31 | 2019-12-24 | Analog Devices, Inc. | Quad proof mass MEMS gyroscope with outer couplers and related methods |
| US10697774B2 (en) | 2016-12-19 | 2020-06-30 | Analog Devices, Inc. | Balanced runners synchronizing motion of masses in micromachined devices |
| US10627235B2 (en) | 2016-12-19 | 2020-04-21 | Analog Devices, Inc. | Flexural couplers for microelectromechanical systems (MEMS) devices |
| US10415968B2 (en) | 2016-12-19 | 2019-09-17 | Analog Devices, Inc. | Synchronized mass gyroscope |
| US10466053B2 (en) | 2017-04-04 | 2019-11-05 | Invensense, Inc. | Out-of-plane sensing gyroscope robust to external acceleration and rotation |
| DE102017213644A1 (de) * | 2017-08-07 | 2019-02-07 | Robert Bosch Gmbh | Drehratensensor, Verfahren zur Herstellung eines Drehratensensors |
| DE102017213637A1 (de) * | 2017-08-07 | 2019-02-07 | Robert Bosch Gmbh | Ein- und zweiachsiger Drehratensensor |
| DE102017216010A1 (de) * | 2017-09-12 | 2019-03-14 | Robert Bosch Gmbh | Mikromechanische Drehraten-Sensoranordnung und entsprechendes Herstellungsverfahren |
| US10948294B2 (en) | 2018-04-05 | 2021-03-16 | Analog Devices, Inc. | MEMS gyroscopes with in-line springs and related systems and methods |
| CN108731659A (zh) * | 2018-05-25 | 2018-11-02 | 中国电子科技集团公司第二十九研究所 | 一种多检测振动单元微惯性导航陀螺仪 |
| JP6897806B2 (ja) * | 2019-02-15 | 2021-07-07 | 株式会社村田製作所 | バランス型多軸ジャイロスコープ |
| JP7188311B2 (ja) | 2019-07-31 | 2022-12-13 | セイコーエプソン株式会社 | ジャイロセンサー、電子機器、及び移動体 |
| US10823569B1 (en) * | 2019-08-22 | 2020-11-03 | Nxp Usa, Inc. | Multiple axis sensing device based on frequency modulation and method of operation |
| DE102020202158A1 (de) * | 2020-02-19 | 2021-08-19 | Robert Bosch Gesellschaft mit beschränkter Haftung | Mikromechanische Drehraten-Sensoranordnung, Drehraten-Sensorarray und entsprechendes Herstellungsverfahren |
| DE102020112267A1 (de) | 2020-05-06 | 2021-11-11 | Northrop Grumman Litef Gmbh | Drehfederelement |
| US11193771B1 (en) | 2020-06-05 | 2021-12-07 | Analog Devices, Inc. | 3-axis gyroscope with rotational vibration rejection |
| CN116075728A (zh) | 2020-06-08 | 2023-05-05 | 美国亚德诺半导体公司 | 驱动和感测应力释放装置 |
| US11686581B2 (en) | 2020-06-08 | 2023-06-27 | Analog Devices, Inc. | Stress-relief MEMS gyroscope |
| US11698257B2 (en) | 2020-08-24 | 2023-07-11 | Analog Devices, Inc. | Isotropic attenuated motion gyroscope |
| US11525680B2 (en) * | 2021-02-17 | 2022-12-13 | Nxp Usa, Inc. | Angular rate sensor with centrally positioned coupling structures |
| CN114719833B (zh) * | 2022-02-22 | 2025-04-22 | 瑞声开泰科技(武汉)有限公司 | 一种mems陀螺 |
| US12540072B2 (en) | 2022-03-31 | 2026-02-03 | Stmicroelectronics S.R.L. | Compact microelectromechanical angular rate sensor |
| CN116892917A (zh) * | 2022-03-31 | 2023-10-17 | 意法半导体股份有限公司 | 紧凑型微机电角速率传感器 |
| DE102023204514A1 (de) * | 2023-05-15 | 2024-11-21 | Robert Bosch Gesellschaft mit beschränkter Haftung | Mikromechanische Koppelfeder-Struktur umfassend einen zentralen Federbalken, einen ersten sowie einen zweiten äußeren Federbalken und einen Federkopf |
| DE102023204726A1 (de) * | 2023-05-22 | 2024-11-28 | Robert Bosch Gesellschaft mit beschränkter Haftung | Drehratensensor mit einem, eine Haupterstreckungsebene aufweisenden Substrat und mindestens einem Massenschwinger |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4428405A1 (de) * | 1994-08-11 | 1996-02-15 | Karlsruhe Forschzent | Drehratensensor |
| US20060107738A1 (en) * | 2002-01-30 | 2006-05-25 | Rainer Willig | Micromechanical rotational rate sensor |
| DE102007030119A1 (de) * | 2007-06-29 | 2009-01-02 | Litef Gmbh | Corioliskreisel |
Family Cites Families (32)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4442033C2 (de) | 1994-11-25 | 1997-12-18 | Bosch Gmbh Robert | Drehratensensor |
| DE19641284C1 (de) * | 1996-10-07 | 1998-05-20 | Inst Mikro Und Informationstec | Drehratensensor mit entkoppelten orthogonalen Primär- und Sekundärschwingungen |
| GB9621873D0 (en) | 1996-10-21 | 1996-12-11 | British Tech Group | A solid state,multi-axis gyroscope |
| JP3702607B2 (ja) | 1997-02-28 | 2005-10-05 | 株式会社村田製作所 | 角速度検出素子 |
| DE10108198A1 (de) | 2001-02-21 | 2002-09-12 | Bosch Gmbh Robert | Drehratensensor |
| JP3870895B2 (ja) * | 2002-01-10 | 2007-01-24 | 株式会社村田製作所 | 角速度センサ |
| US6865944B2 (en) * | 2002-12-16 | 2005-03-15 | Honeywell International Inc. | Methods and systems for decelerating proof mass movements within MEMS structures |
| US6837107B2 (en) | 2003-04-28 | 2005-01-04 | Analog Devices, Inc. | Micro-machined multi-sensor providing 1-axis of acceleration sensing and 2-axes of angular rate sensing |
| FR2859528B1 (fr) | 2003-09-09 | 2006-01-06 | Thales Sa | Gyrometre micro-usine a double diapason et a detection dans le plan de la plaque usinee |
| US20050066728A1 (en) | 2003-09-25 | 2005-03-31 | Kionix, Inc. | Z-axis angular rate micro electro-mechanical systems (MEMS) sensor |
| US6892575B2 (en) | 2003-10-20 | 2005-05-17 | Invensense Inc. | X-Y axis dual-mass tuning fork gyroscope with vertically integrated electronics and wafer-scale hermetic packaging |
| JP2008514968A (ja) * | 2004-09-27 | 2008-05-08 | コンティ テミック マイクロエレクトロニック ゲゼルシャフト ミット ベシュレンクテル ハフツング | 回転速度センサ |
| JP4353087B2 (ja) | 2004-12-01 | 2009-10-28 | 株式会社デンソー | 回転振動型角速度センサ |
| FI116543B (fi) | 2004-12-31 | 2005-12-15 | Vti Technologies Oy | Värähtelevä mikromekaaninen kulmanopeusanturi |
| US7421897B2 (en) | 2005-04-14 | 2008-09-09 | Analog Devices, Inc. | Cross-quad and vertically coupled inertial sensors |
| JP4702942B2 (ja) | 2005-10-14 | 2011-06-15 | Necトーキン株式会社 | 振動ジャイロ用素子及び振動ジャイロ |
| CN1766528B (zh) * | 2005-11-11 | 2010-09-15 | 中北大学 | 具有较高灵敏度和带宽的差分式微机械陀螺 |
| EP1832841B1 (en) | 2006-03-10 | 2015-12-30 | STMicroelectronics Srl | Microelectromechanical integrated sensor structure with rotary driving motion |
| EP1996899B1 (de) | 2006-03-10 | 2014-09-17 | Continental Teves AG & Co. oHG | Drehratensensor mit kopplungsbalken |
| DE102006047135A1 (de) | 2006-07-31 | 2008-02-07 | Robert Bosch Gmbh | Drehratensensor |
| US7401517B2 (en) | 2006-08-18 | 2008-07-22 | Robert Bosch Gmbh | Dual-axis yaw rate sensing unit having a tuning fork gyroscope arrangement |
| US7461552B2 (en) | 2006-10-23 | 2008-12-09 | Custom Sensors & Technologies, Inc. | Dual axis rate sensor |
| US20080098814A1 (en) | 2006-10-31 | 2008-05-01 | Honeywell International Inc. | Dual mode mems sensor |
| DE102006052522A1 (de) | 2006-11-06 | 2008-05-29 | Robert Bosch Gmbh | Drehratensensor mit zwei sensitiven Achsen |
| US7950281B2 (en) | 2007-02-28 | 2011-05-31 | Infineon Technologies Ag | Sensor and method for sensing linear acceleration and angular velocity |
| DE102007054505B4 (de) | 2007-11-15 | 2016-12-22 | Robert Bosch Gmbh | Drehratensensor |
| CN102348956B (zh) | 2009-03-11 | 2014-12-10 | 大陆-特韦斯贸易合伙股份公司及两合公司 | 双轴旋转速率传感器 |
| US8256290B2 (en) | 2009-03-17 | 2012-09-04 | Minyao Mao | Tri-axis angular rate sensor |
| US8322213B2 (en) * | 2009-06-12 | 2012-12-04 | The Regents Of The University Of California | Micromachined tuning fork gyroscopes with ultra-high sensitivity and shock rejection |
| CN102483328B (zh) | 2009-09-09 | 2015-08-05 | 大陆-特韦斯贸易合伙股份公司及两合公司 | 具有线性和旋转地震元件的双轴、抗震旋转速率传感器 |
| DE102009046506B4 (de) * | 2009-11-06 | 2024-01-18 | Robert Bosch Gmbh | Drehratensensor |
| ITTO20091042A1 (it) | 2009-12-24 | 2011-06-25 | St Microelectronics Srl | Giroscopio integrato microelettromeccanico con migliorata struttura di azionamento |
-
2010
- 2010-09-09 CN CN201080040102.6A patent/CN102483328B/zh active Active
- 2010-09-09 EP EP10750135.5A patent/EP2475960B1/de active Active
- 2010-09-09 US US13/391,314 patent/US9068834B2/en active Active
- 2010-09-09 DE DE102010040514A patent/DE102010040514A1/de not_active Withdrawn
- 2010-09-09 DE DE102010040516A patent/DE102010040516A1/de not_active Ceased
- 2010-09-09 WO PCT/EP2010/063248 patent/WO2011029878A1/de not_active Ceased
- 2010-09-09 CN CN201080039683.1A patent/CN102575934B/zh active Active
- 2010-09-09 EP EP10749889.1A patent/EP2475959B1/de active Active
- 2010-09-09 US US13/390,776 patent/US9074890B2/en active Active
- 2010-09-09 KR KR1020127008981A patent/KR101708084B1/ko not_active Expired - Fee Related
- 2010-09-09 WO PCT/EP2010/063250 patent/WO2011029879A1/de not_active Ceased
- 2010-09-09 KR KR1020127009037A patent/KR101699573B1/ko not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4428405A1 (de) * | 1994-08-11 | 1996-02-15 | Karlsruhe Forschzent | Drehratensensor |
| US20060107738A1 (en) * | 2002-01-30 | 2006-05-25 | Rainer Willig | Micromechanical rotational rate sensor |
| DE102007030119A1 (de) * | 2007-06-29 | 2009-01-02 | Litef Gmbh | Corioliskreisel |
Also Published As
| Publication number | Publication date |
|---|---|
| KR101708084B1 (ko) | 2017-02-17 |
| DE102010040514A1 (de) | 2011-04-21 |
| EP2475959B1 (de) | 2015-07-08 |
| CN102483328B (zh) | 2015-08-05 |
| CN102483328A (zh) | 2012-05-30 |
| US20120279301A1 (en) | 2012-11-08 |
| CN102575934A (zh) | 2012-07-11 |
| EP2475960B1 (de) | 2019-01-16 |
| US20120210788A1 (en) | 2012-08-23 |
| KR20120069712A (ko) | 2012-06-28 |
| CN102575934B (zh) | 2016-01-20 |
| WO2011029878A1 (de) | 2011-03-17 |
| WO2011029879A1 (de) | 2011-03-17 |
| KR101699573B1 (ko) | 2017-01-24 |
| DE102010040516A1 (de) | 2011-03-10 |
| EP2475959A1 (de) | 2012-07-18 |
| US9074890B2 (en) | 2015-07-07 |
| EP2475960A1 (de) | 2012-07-18 |
| US9068834B2 (en) | 2015-06-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101699573B1 (ko) | 포개지고 선형으로 진동하는 진동 부재를 포함하는 이중축 내충격 요 레이트 센서 | |
| CN101027536B (zh) | 旋转速度传感器 | |
| US9651375B2 (en) | Yaw-rate sensor with a compensating mass | |
| JP5300494B2 (ja) | 連結棒を有する回転速度センサ | |
| CN101868692B (zh) | 偏航率传感器 | |
| CN103776437B (zh) | 微机械结构 | |
| USRE45855E1 (en) | Microelectromechanical sensor with improved mechanical decoupling of sensing and driving modes | |
| CN101639487B (zh) | 三轴加速度传感器 | |
| US20070220973A1 (en) | Multi-axis micromachined accelerometer and rate sensor | |
| JP5884603B2 (ja) | ロールオーバージャイロセンサ | |
| US20070034007A1 (en) | Multi-axis micromachined accelerometer | |
| JP2009529666A6 (ja) | 連結棒を有する回転速度センサ | |
| EP3598146B1 (en) | Microelectromechanical device for out-of-plane motion detection | |
| KR101915954B1 (ko) | 멤스 기반의 3축 가속도 센서 | |
| JP2009529697A (ja) | 微小機械回転速度センサ | |
| US11421991B2 (en) | Yaw-rate sensor with a substrate having a main extension plane, method for manufacturing a yaw-rate sensor | |
| FI126557B (en) | Improved gyroscope structure and gyroscope | |
| CN110998232B (zh) | 单轴和双轴的转速传感器 | |
| JP2008261771A (ja) | 慣性力センサ | |
| JP2008261772A (ja) | 慣性力センサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
St.27 status event code: A-0-1-A10-A15-nap-PA0105 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| A201 | Request for examination | ||
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U12-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| FPAY | Annual fee payment |
Payment date: 20200109 Year of fee payment: 4 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 5 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 6 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 7 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 8 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-5-5-R10-R11-asn-PN2301 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-5-5-R10-R14-asn-PN2301 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| PC1903 | Unpaid annual fee |
St.27 status event code: A-4-4-U10-U13-oth-PC1903 Not in force date: 20250119 Payment event data comment text: Termination Category : DEFAULT_OF_REGISTRATION_FEE |
|
| H13 | Ip right lapsed |
Free format text: ST27 STATUS EVENT CODE: N-4-6-H10-H13-OTH-PC1903 (AS PROVIDED BY THE NATIONAL OFFICE); TERMINATION CATEGORY : DEFAULT_OF_REGISTRATION_FEE Effective date: 20250119 |
|
| PC1903 | Unpaid annual fee |
St.27 status event code: N-4-6-H10-H13-oth-PC1903 Ip right cessation event data comment text: Termination Category : DEFAULT_OF_REGISTRATION_FEE Not in force date: 20250119 |